行政院國家科學委員會專題研究計畫 成果報告
等向性產生器之分類與特性及在機器人設計上之應用
計畫類別: 個別型計畫
計畫編號: NSC92-2212-E-011-044-
執行期間: 92 年 08 月 01 日至 93 年 07 月 31 日 執行單位: 國立臺灣科技大學機械工程系
計畫主持人: 蔡高岳
計畫參與人員: 王志偉 張人鳳
報告類型: 精簡報告
處理方式: 本計畫可公開查詢
中 華 民 國 93 年 9 月 22 日
行政院國家科學委員會專題研究計畫成果報告
等向性產生器之分類與特性及在機器人設計上之應用
計畫編號:NSC – 92 – 2212 – E – 011 - 044 執行期限: 92 年 8 月 1 日 至 93 年 7 月 31 日
主持人:蔡高岳 國立臺灣科技大學機械系
計畫參與人員:王志偉、張人鳳 國立臺灣科技大學機械系
一 : 中文摘要
本計劃首先分析並簡化目前等向性產 生器之解,其次利用簡化後之解導出 設計等向性機器人之方法。在串聯機 器人方面以 6 自由度等向性產生器的 參數當作數值方法之初始値以求得多 餘軸等向性產生器。其次加上拘束方 程式,並利用所得產生器之參數作為 初始値,以得到具特殊參數之等向性 產生器並以此產生器設計出具特殊或 想要連桿參數之等向性串聯機器人。
在並聯機器人方面計劃中提出一創新 之 方 法 以 求 得 整 體 等 向 性 最 好 之 設 計。
Abstract
This project first analyzes and simplifies the current solutions for isotropy generators. A modified solution is then proposed to develop isotropic manipulators. For serial designs, the developed method uses the parameters of 6-DOF isotropy generators as the
initial values in a numerical method to find redundant isotropic generators.
Additional constraint equations are then added, with the parameters of the obtained generators as initial values, to get the isotropic generators with special parameters. Each generator can be developed into many isotropic designs with special or desired link parameters.
For parallel manipulators, an efficient method is proposed to find the parallel isotropic design with optimum global isotropy.
二 : 計劃緣由及目的
當 機 器 人 處 於 一 等 向 性 構 形 (isotropic configuration)時,其端效器 (end-effector)能夠往各 方向均勻運動 或往各方向均勻的輸出力量及力矩,
以及與各方向之奇異點保持相等之距 離,此外亦能使計算誤差減至最小,
故為機器人最佳之控制點。Klein 及 Miklos [1]提出一些與等向性機器人相
關之定理,利用這些定理導出約二十 個非線性聯立方程式,並利用最佳設 計之方法獲得數個 6 自由度等向性設 計和一個 7 自由度多餘軸機器人。
Angeles [2]亦導出數個與多餘軸等向 性機器人有關之定理。Tsai 及 Huang [3]
解滿足等向性條件之非線性聯立方程 式並得到解析解。所得到之 6 條直線 稱 為 等 向 性 產 生 器 (isotropy generator)。利用等向性產生器設計並 聯機器人時我們僅需提供決定產生器 方位之兩個參數並求得 6 條直線與代 表平台(platform)與基座(base)兩平面 之交點即可得到一等向性設計,此方 法不但非常容易使用,而且可得到無 限多個等向性設計,故我們可更進一 步去求得具有其他特性(比如最佳整體 等向性或最大工作空間)之最佳設計。
目前產生器之解共有四組,且每組解 中之參數可以是任何實數故搜尋最佳 設計時將耗費相當多之時間,因此本 計劃首先將研究這些解之特性,將可 得到相同產生器之解或參數範圍刪除 以增進搜尋之效率。
目前得到多餘軸串聯等向性設計 之方法必須利用數值法解 20 多個非線 性聯立方程式。如沒適當的初始值此 方法將非常困難及費時。由於 6 自由 度產生器可輕易得到,我們可以用這 些產生器當作數值方法的初始值,用 以推導 7 自由度多餘軸產生器。因此 n 自由度產生器可以藉由(n-1)自由度產 生器當作初始値求得,我們也可以利 用 n 自由度產生器當作初始值以求得 (n-1)自由度產生器。藉由此方法我們 可獲得任何自由度之多餘軸等向性設 計。
一般而言,機器人有一些較理想
之連桿參數,像是
a
i=
0、α
i= °
0 或90°
、d
i= 0
等,具這些參數機器人之 位移分析較為簡單,且比較不會發生 連桿間之干涉現象。當兩軸平行、垂 直或相交時即可得到這些連桿參數。本文首先導出拘束方程式以得到直線 間具平行、垂直或相交特徵之
6
自由 度產生器,再利用所獲得的產生器當 為初始產生器以求得擁有特殊連桿參 數之多餘軸等向性機器人。因所獲得 之產生器其各軸間相對位置有ㄧ定之 規則,故ㄧ般而言我們沒辦法得到所 有想要之特殊連桿參數。因此文中亦 提供兩種不同設計具特殊連桿參數等 向性或近似等向性機器人之方法並比 較三種不同設計之優劣點。在並聯機器人方面本文將利用簡
化整理後之解配合對稱機器人之觀念 導 出 方 法 求 得 整 體 等 向 性 最 佳 之 設 計,使用之方法不需經由繁複之搜尋 過程即可得到所要之設計。二、等向性產生器之解
Tsai
及Huang
導出之四組解因篇 幅限制在本文中不再列出。此節僅說 明這些解包含相當多之等效產生器(
兩 產生器直線間之相對位置若完全相同 時稱為等效產生器)
並如何將這些解簡 化。假設一產生器上第i
條直線之Plücker’s
座標為
i i
i
L = e
m (1)
則兩直線
L 及
iL
j之相對位置可由下關 係式判斷:ij
a
ijsin
ijλ ≡ ⋅ e m + e m
i j j⋅
i= α (2)
其中
a
ij、α
ij分別代表直線L
i與L
j沿 其 公 垂 線 方 向 所 量 測 到 之 距 離 與 角 度。假若6
條直線間的λ
值均相等,即 有可能是等效之產生器。因產生器上 前三條直線間之相對位置以及後三條 直線間之相對位置固定不變,因此我 們可用以下之函數來判斷等效產生器 是否存在:∑∑
= =
=
31 6
4
i j
λ
ijψ (3)
若
ψ
相同時再確認各λ
ij 值是否相 同。經分析後發現文獻[3]
中之四組解 於− ∞ ≤ t ≤ ∞
區間內之所有產生器可 由第三解π
α n
t t
t 2
1 1 1 tan 2
2
2
1
+
+ + +
=
−−
β =
2tan−1( ) t +
2n π (4)
於0 5
t 5
≤ ≤
區間內獲得。縮減解之 數目及設計參數區間對於在搜尋最佳 設計時將能大量節省搜尋時間。
Klein
及Miklos
曾証明若6
條直線 沿 著 其 對 應 之 偏 置 向 量(offset vector) r
i旋轉角度φ
後,仍然會滿足等 向性條件。直線L
i沿著其r
i旋轉角度φ
後 所 得 之 新 座 標$
i可 由 下 式 求 得 :φ
φ
×
×
i 3 3 i
i
3 3 i i
rot(r , ) 0 e
$ = 0 rot(r , ) m (5)
其中
×
×
i i
i
i i
e m
r = e m
。參數φ
範圍介於0
到180
度之間,但此範圍內亦會產生 等效產生器。經由類似式(3)
之方法分 析後發現參數φ
之範圍只需取0
到90
度之間,即可獲得所有之產生器。
三、具特殊參數之產生器
給予兩直線
i i
i
L = e
m
、
j j
j
L = e
m
, 由式(2)
得知當兩直線不平行時若e m + e m
i⋅
j j⋅
i= 0 (6)
時表示兩直線交於一點,此亦代表連 接此兩軸之連桿參數a
i將為零。兩直 線垂直或平行之關係式可表示為:e e
i⋅ =
j0 (7)
或
e e
i⋅ =
j1
或e e
i⋅ = −
j1 (8)
因6
自由度產生器上之直線具有兩個 自由度(t
及φ
),故理論上應可找到至 少兩組直線交於一點(含相交於無窮 遠處之點)。經由式(5)
之轉換後,產生 器前三條直線座標為φ
之函數,而後三 條直線座標為t
與φ
之函數。經公式(6)-(8)
分 析 後 發 現 只 要 任 兩 直 線 平 行、垂直或交於一點,則至少存在三 組直線會平行、垂直或交於一點。其 中較特殊之產生器(
至少存在四組直線 平行、垂直或交於一點)
列於表1
,表 中( ) ⋅
,[ ] ⋅
或{ ⋅ }
分別代表括弧內之直線平行、垂直或交於一點。其中
t = 0, φ = 0
之產生器如圖1
所示。t = 0, φ
= 45
o產生器之直線則構成一正三角錐(
見圖2)
。這些產生器將被當為初始產 生器以求得具特殊參數之多餘軸產生 器。四、多餘軸產生器
假設
H
為一6×n
矩陣其第i
行(代表直線之
Plücker’s
座標)如下式所示:[ c α
is β
is α
is β
ic β
ix
iy
iz
i]
ti
=
$
(9)
經此假設後H
矩陣包含5n
個變數,若H
滿足等向性條件,則H
中之直線即 構成一等向性產生器。而等向性條件 所得之方程式數目可整理如下:
(1)
矩陣H
上三列向量長度相等 且互相垂直,可得5
個方程式。
(2)
矩陣H
下三列向量長度相等 且互相垂直,可得5
個方程式。
(3)
矩陣H
上三列向量與下三列 向量構成之子空間互相垂直,可得9
個方程式。
(4)
依 直 線Plücker’s
座 標 之 定 義,矩陣H
每一行之上三列與下三列 之內積為零,可得n
個方程式。假設
H
i*為矩陣H
第i
列,則滿足 條件(1)
∼(3)
之19
個方程式可表為下 列兩種型式:ε
ij= H H
i* tj*(10)
ξ
ij= H H - H H
i* ti* j* tj*(11)
而滿足條件(4)
之n
個方程式可表為:k
x c
k ks
ky s
k ks
kz c
k kδ = α β + α β + β
1, 2,
k = ⋅⋅⋅ n (12)
當 非 線 性 聯 立 方 程 式 之 殘 餘 數
(residues) ε
ij、ξ
ij與δ
k均為零時,則得 到一n
自由度之產生器。因此欲得到n
自由度等向性產生器,必須解含5n
個變數之
(19+n)
個非線性聯立方程式。本文將利用數值方法求解,使得殘餘數
ε
ij、ξ
ij與δ
k趨近於零,即可得到一等向性產生器。
ㄧ些較特殊之
m
自由度產生器,像是
m=6k
或m=6k+3
(k=1,2,3,
…),較容易得到,所以可用來當作初始產 生 器 以 求 得 希 望 得 到 自 由 度 之 產 生 器。假若
m=6k
,則m
自由度產生器是 由k
個6
自由度產生器所組成,因此 可輕易求得。而當m=6k+3
時,前6k
行由k
個6
自由度產生器所組成,後 三行6×3
子矩陣之上三列與下三列分 別由3×3
之正交矩陣和零矩陣所組成 即可得到。但若因要得到某些特殊連 桿參數使得下三列之3×3
子矩陣不能 為零矩陣時,則可直接利用φ = 0
之6
自由度產生器之前三行或者後三行之6×3
子矩陣代入H
之最後三行即可。由此方法導出之矩陣滿足等向性條件
(1)
與(2)
之10
條方程式,且滿足條件(4)
之n
條方程式。等向性條件(3)
之九個 殘餘數雖不為零,但其最大值不會大 於決定產生器大小之參數S
,因此最後 三行如由參數S
較小之6
自由度產生 器獲得時其殘餘數ε
也相對的變小,非 線性方程式將較容易收斂。其他任何自由度之產生器可以藉
由
6k
或(6k+3)
自由度產生器增加一行(或刪除一行)求得。如果
H
為一等 向性產生器而α
n、β
n、x
n、y
n與z
n代 表 所 增 加(
或 欲 刪 除)
行 向 量 內 之 參 數,則加入(或刪除)一行後各殘餘 數之上限為ε
12 、ε
23 、ε
13≤ 0.5
;ε
14 、ε
24 、ε
34≤ x
n ;ε
15 、ε
25 、ε
35≤ y
n ;ε
16 、ε
26 、ε
36≤ z
n ;45
x
ny
nε = ⋅
、ε
56= y
n⋅ z
n ;46
x
nz
nε = ⋅
;ξ
12 、ξ
23≤ 1
;2 2
45
x
ny
nξ = −
;ξ
56= y
n2− z
n2 。如減少 一行時所有δ
k= 0 k= 1,2,
…,,n
。如增 加 一 行 則δ
k= 0 , 1, 2,...., ( k = n − 1) ,
n
x c
n ns
ny s
n ns
nz c
n nδ = α β + α α + β
,但我 們可以很容易找出一組α
n、β
n、x
n、y
n、z
n使δ
n= 0
。新增行向量時當x
n、y
n和z
n若皆為零時將使得大部分的殘 餘數為零,因此為最佳之選擇。但理 論上只要x
n、y
n和z
n之值不要太大,非線性方程式僅需少數的迭代即可收 斂。若利用較高自由度產生器時我們 可以刪除擁有最小長度之行向量,並 以剩餘之元素當作初始值來求得所要 之產生器。
五、設計具特殊參數之多餘軸機器人 經由前節之方法可輕易獲得一 m 自由度多餘軸產生器,因設計變數多 於非線性方程式,故可再加入式
(6)-(8)
導出之拘束方程式以得到具特別參數 之產生器。為了求得所要之產生器,我們需要提供適當之初始產生器,本 文將由表
1
中選擇最接近所要參數的 產生器當作初始產生器,求出其對應 的α
i、β
i、x
i、y
i、z
i當作初始値用 來解包含額外拘束方程式之非線性聯 立方程式。如果我們使用較高自由度 之 初 始 產 生 器 , 將 有 更 多 的 設 計 變 數,所以非線性方程式較容易收斂。如果方程式不收斂,可能所要求之產 生器不能由此初始產生器所獲得。利 用較高自由度之初始產生器亦可讓我 們固定某些設計變數(假設剩餘之未 知數仍大於拘束方程式數目)。例如三 軸交於一點之拘束方程式非常複雜,
所以我們可以利用圖
2
之角錐型產生 器,並且固定三軸相交於一點之直線 的α
i、β
i、x
i、y
i、z
i値。另一方面,使用較低自由度初始產生器之優點為 我們可額外增加一條直線使其同時滿 足許多拘束方程式。例如增加一條兩 直線間的公垂線,此增加的軸將自動 滿足垂直和相交之四個拘束方程式。
此外,如要獲得三軸交於一點之產生 器,我們可以直接增加一條直線使其 通過相交兩直線之交點並垂直此兩直 線。但此方法之殘餘數比較大,所以 某些所要之特殊產生器可能無法利用 此方法得到。
六、近似等向性機器人之設計
一般而言,等向性機器人所能得 到之等向性構形,包含有限個等向性 構形
C
i,以及將此構形C
i繞著其第一 軸旋轉所得到之所有構形。多餘軸等 向性機器人可以利用另一方法來設計 以得到更多的等向性構形。假設n
自 由度機器人之後6
軸滿足等向性條 件,則當我們固定前面(n-6)
軸時,此 機器人即處於ㄧ等向性構形,因此我 們可以設計一n
自由度機器人,其中前
(n-6)
軸可以設計成任何我們想要之連桿參數,而後
6
軸則為一6
自由度 等向性設計。此種設計方法理論上可 使機器人到達∞
n−5個等向性構形。等向性機器人為一理想的設計,
但有些時候並不大實用,例如,在一 等向性構形時,端效器大都是被圍繞 在所有連桿當中,此情況將增加了連 桿干涉機率故不適合當為一般工業用 機器人使用。既然接近工業用機器人 之等向性設計無法得到,我們只能設 計一非常接近於等向性設計之工業用
機器人。由前節得知當式
(10)-(12)
之殘 餘數如全部為零時即可獲得一等向性 設計,殘餘數愈小則愈接近等向性設 計。因此我們可以利用以下殘餘數絕 對值大小之和來評估接近於等向性設 計之程度:
µ = ∑ ε
ij+ ∑ ξ
ij+ ∑ δ
n(13)
因為產生器之大小會影響到殘餘數之 大小,因此需利用相同大小之產生器 來設計等向性設計或近似等向性之設 計,得到所需的產生器之後,我們可 以再修改產生器之大小,將矩陣H
下 三列子矩陣乘上一非零之常數即可得 到所要尺寸之產生器。在本文中,我 們將利用參數S = 1
之產生器當作初始 產生器。設計時我們首先尋找與所要 參數較接近之初始產生器然後固定某 些已經得到之參數。其他尚未得到之 參數可以加重所對應拘束方程式的權 值以保證能夠得到這些參數,然後再 以數值法解非線性方程式直到µ
値不 能再減少為止即可獲得具所要連桿參 數之近似等向性產生器。我們亦可用 最佳設計之方法將µ
當為目標函數,以拘束方程式之方式獲得特殊之參數 以得到所要之近似等向性設計。
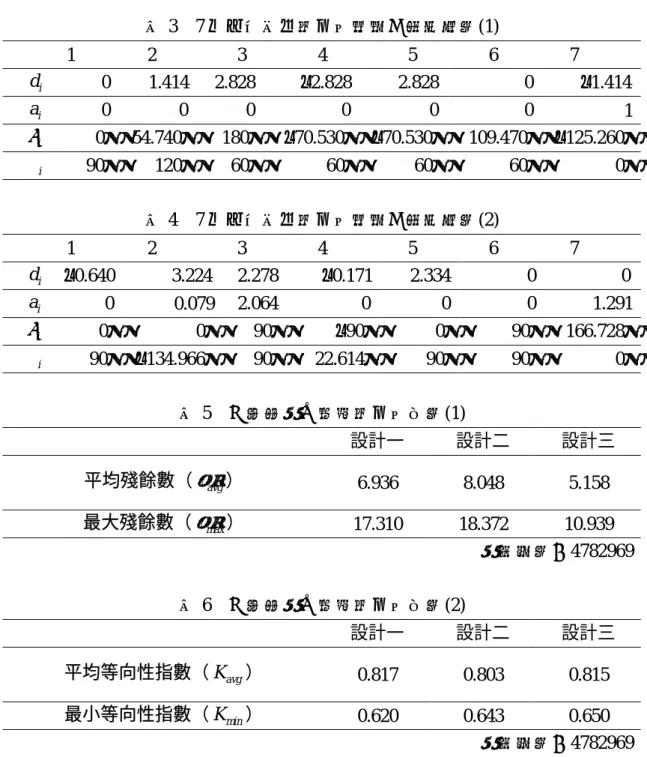
七、串聯機器人數值範例
此節將以三種不同方法導出
7
自 由度等向性或近似等向性設計並比較 其整體等向性之好壞。三種方法皆利 用S = 1
、t = 0
與φ = ° 45
之角錐型6
自 由度產生器為初始產生器。第一個等 向性設計以能得到最多之特殊連桿參 數 為 目 標 , 而 得 到 之 結 果 為{1,2,3}, (4,5), (6,7), [4,6], [4,7], [5,6], [5,7], {4,5}, {4,6}, {4,7},{5,6},{5,7},{6,7
}。將
H
矩陣後三列乘以5
後經幾何運算(
詳見參考文件[4])
後之連桿參數列於 表 2。第二個設計為能得到最多等向性 構形之近似等向性機器人。我們僅再 加入
L
7使其垂直於初始產生器L
4之 中心點以得一具前兩軸相交、垂直且 後六軸之關係位置如圖2
所示之7
自 由度機器人。將H
矩陣後三列乘以5
後此機器人之連桿參數列於表 3。第三個為接近工業用機器人之設 計。所得機器人之前兩軸將相互垂直 且交於一點而後三軸亦相互垂直且交 於一點。設計時我們首先尋找出已經 擁有所要參數之
8
自由度產生器(
註:
高自由度產生器因設計變數較多因此 才有可能得到所要之參數)
,然後將這 些參數固定並刪除與這些參數無關且 向量長度最小之行。其次以牛頓法求 解並使µ
値不能再縮減為止。所得到 之最小值為µ = 0.825
,因此僅獲得一 近似等向性設計。將H
矩陣後三列乘 以5
後所得機器人之連桿參數列於表 4。三種設計之整體等向性
(
以各軸於 等向性構形之θ ± ° 20
(∆ = ° θ 5
)所得µ
値之平均値或以所得之µ
max評估)
之 值列於表 5。 表6
則是以較為正式之 等向性指數(
見參考文件[4]) K
評估所得之結果
( K =1
表示位於一等向性構形
)
。兩種不同指數比較之結果顯示最 接近工業用機器人之近似等向性設計 之整體等向性並不輸於第一個等向性 設計。八、並聯式機器人之設計
本節提出一設計具最佳整體等向 性並聯式機器人之方法。整體等向性
以 機 器 人 於
x = x
o± k ∗ ∆ x , y,
k y
y =
o± ∗ ∆ z = z
o± k ∗ ∆ z , ,
5
o
k
∗
o±
= α
α β = β
o± k ∗ 5
o 及5
o o± k ∗
= γ
γ , k = 0, 1, 2,Κ .n
位置 時K
之 平 均 值K
ave 衡 量 , 其 中o o o
, α , β z
, y ,
x
o o 及γ
o代表機器人於等 向性構形時之參數。首先假設對稱性 機器人具有較佳整體等向性並求得文 獻[3]
中 之 對 稱 性 機 器 人 之K
ave =0.5622
及K
min( K
之 最 小 值) =
0.288
1。其次利用最佳設計軟體求得一些
K
ave>0.5622
及K
min> 0.288
1 之等 向性機器人後發現所得到之結果皆為 對稱性機器人。假設得到驗證後再利 用對稱條件導出四個可用來求得所有 對稱性機器人之拘束方程式。這些方 程式僅含四個設計變數t, φ , ψ
及χ
,其中後面兩個變數為決定產生器 方位之兩個尤拉角。變數數目與方程 式 數 目 相 同 故 可 得 到 有 限 數 目 之 解(finite solutions).
衡量及比較所得機器 人之K
ave及K
min 最後有數組解具有 最佳整體等向性,其中一組解為t =
5
5 , φ = 90
o, ψ =
54.736o,χ =
135o。 圖3
顯示此解所對應等向性機器人之12
個球窩接頭坐標以及構形九、總結
等向性機器人之設計需解許多非 線性方程式。若以數值方法求解時,
除非給予的初始值非常接近方程式之 解,否則將非常費時且不易收斂。本 文提出ㄧ方法,利用
6
自由度等向性 產生器當作數值方法之初始值以求得 多餘軸等向性產生器。此方法可輕易的獲得任何自由度之產生器,而每一
m
自由度之產生器理論上可推導出m!
個 等向性設計。在 具 特 殊 連 桿 參 數 之 機 器 人 方 面,本文提出數個擁有最多平行、垂 直或相交情況的特殊產生器當為初始 產生器以求得所要之設計。但所要之 機器人如與初始產生器不是很接近時 可能無法得到所要之設計,因此我們 也提出了其他兩種方法,以獲得所要 連桿參數或可達到更多等向性構形之 近似等向性設計。在並聯式機器人因 篇幅有限因此僅提出最後之結果。本 計畫之成果已寫成
(i) The design of redundant isotropic manipulators with special link parameters (accepted for publication on ROBOTICA); (ii) The optimum design of 6-dof isotropic parallel manipulators
兩篇論文投稿至 國外機器人期刊發表。參考文獻
1. C. A. Klein and T. A. Miklos, “Spatial robotic isotropy”, Int. J. Robot. Res. 10 (4) pp. 426-437 (1991).
2. J. Angeles, “The design of isotropic manipulator architectures in the presence of redundancies”, Int. J. Robot.
Res. 11 (3) pp. 196-201 (1992).
3. K.Y. Tsai and K. D. Huang, “The design of isotropic 6-DOF parallel manipulators using isotropy generators”, Mech. and Mach. Theory 38 (11) pp.
1199-1214 (2003).
4.
王志偉,”
多餘軸等向性機器人之 設計”
,國立台灣科技大學機械工程技 術研究所,2004
年6
月碩士論文。= 0
t φ = 0 °
L1
L2
L3
L5
L4
L6
圖
1 6
自由度產生器表
1
特殊產生器t φ
平行 垂直 相交0 0 (1,4)(2,5)(3,6) [1,2,3][4,5,6]
0 45
o[1,4][2,5][3,6] {1,2,3}{1,5,6}{2,4,6}{3,4,5}
5 5 0 [1,2,3][4,5,6] {1,6}{2,5}{3,4}
5 5 45 [1,6][2,5][3,4] {1,2,3}{4,5}{4,6}{5,6}
表
2 7
自由度等向性機器人連桿參數1 2 3 4 5 6 7 d
i− 4.875 8.422 9.749 − 10.097 − 18.593 0 12.881
a
i0 0 0 1.744 0 0 6.885
θ
i0° 0° 180° 68.395° 95.420° − 113.579 ° 123.213 − ° α
i− ° 90 90° 90° − 108.456 ° 131.811° 131.811° 0.592°
= 0
t φ = 45 °
L1
L2 L3
L5
L4
L6
圖
2
角錐型6
自由度產生器表
3 7
自由度近似等向性機器人連桿參數(1)
1 2 3 4 5 6 7
d
i0 1.414 2.828 − 2.828 2.828 0 1.414 −
a
i0 0 0 0 0 0 1
θ
i0° 54.740° 180° − 70.530 ° − 70.530 ° 109.470° 125.260 − °
α
i90° 120° 60° 60° 60° 60° 0°
表
4 7
自由度近似等向性機器人連桿參數(2)
1 2 3 4 5 6 7
d
i− 0.640 3.224 2.278 − 0.171 2.334 0 0
a
i0 0.079 2.064 0 0 0 1.291
θ
i0° 0° 90° − ° 90 0° 90° 166.728°
α
i90 ° 134.966 − ° 90 ° 22.614 ° 90 ° 90 ° 0 °
表
5
三種設計之整體等向性指數(1)
設計一 設計二 設計三
平均殘餘數(
µ
avg)6.936 8.048 5.158
最大殘餘數(µ
max)17.310 18.372 10.939
計算點數:
4782969
表
6
三種設計之整體等向性指數(2)
設計一 設計二 設計三
平均等向性指數(
K
avg)0.817 0.803 0.815
最小等向性指數(K
min)0.620 0.643 0.650
計算點數:
4782969
P
1= ( 9.659, 9.659, -5 ) Q
1= ( 20.266, 28.030, -20 ) P
2= ( -13.195, 3.536, -5 ) Q
2= ( -34.408, 3.536, -20 ) P
3= ( 3.536, -13.195, -5 ) Q
3= ( 14.142, -31.566, -20 ) P
4= ( -0.539, 3.620, -5 ) Q
4= ( 18.918, 12.070, -20 ) P
5= ( -2.866, -2.277, -5 ) Q
5= ( -19.912, 10.349, -20 ) P
6= ( 3.405, -1.343, -5 ) Q
6= ( 0.994, -22.419, -20 )
圖
3.
整體等向性最佳之並聯式機器人. P
1P
2P
3P
4P
5P
6Q
1Q
2Q
5Q
4Q
6Q
3P
1P
2P
3P
4P
5P
6Q
1Q
2Q
3Q
4Q
5Q
6x y z