公路土壤邊坡滑動無線感測網路監測系統研發
Development of wireless monitoring modules for soil slope failures of highway
主管單位:交通部運輸研究所
朱金元1 謝明志1 陳志芳1 張文忠2 黃安斌3 Chu, Chin-Yuan1 Hsieh, Ming-Jyh1 Chen, Jyh-Fang1 Chang, Wen-Jong2 Huang, An-Bin3
1交通部運輸研究所
2國立成功大學
3成大研究發展基金會 摘要
本計畫針對公路土壤邊坡可能遭遇之土層滑動破壞,進行解析法分析並搭配無 線土層反應監測模組,測試發展適用於土層之解析法依時預警模式,用以互補現有 以雨量監測為指標之經驗法預警模式,提高預警之準確與時效性。研究包括滑動面 發生於飽和土層之深層滑動及非飽和土層之淺層滑動,淺層滑動為延續前期研究成 果,以淺層土壤水分作為預警指標,除持續進行現地監測與分析模式測試外,並精 進現有模組;深層滑動以結合具嚴謹力學及通用性之解析法邊坡穩定分析及量測土 層孔隙水壓反應之無線監測模組,利用建立之場址水文與地質模型進行水力力學耦 合邊坡滑動數值分析,預測邊坡依時性反應,以發展場址客製化具依時特性之公路 土壤邊坡深層滑動預警架構。所開發之監測模組以廣為應用於物聯網之微機電感測 系統,結合無線通訊與雲端儲存顯示技術,整合具無線通訊功能且可監測地表傾角、
土中分層濕度及孔隙水壓之監測模組,形成分佈式土層滑動監測網路,作為相關防 災作為啟動之準據。
關鍵詞:邊坡破壞、無線監測模組、水力力學耦合分析、依時預警系統、物聯網 Abstract
To improve the limitations of rainfall-based slope warning system, this project aims to develop time-dependent warning system of soil slopes by integrating rigorous slope analysis with in-situ wireless, real-time monitoring system. The new warning technology that integrated the hydro-mechanical slope analysis and wireless sensing module for field key properties is under development. In current stage, both surficial failures with sliding occurred in unsaturated zone, and deep-seated slides where failure surface located in saturated zone, are covered. Wireless sensing modules adopting micro-electro-mechanical system (MEMS) sensors with wireless communication components are integrated to real-time monitor surficial ground inclination, water content profiles, and pore water pressures. The technologies developed for internet of things have been used in the
development of sensing modules. The target failure modes include both shallow slips in unsaturated zone triggered by infiltration and deep slides in saturated zone triggered by excess pore pressures due to seepage. For shallow slip site, soil moisture contents at two depths and surface inclination are monitored and process for warning. In deep slide cases, pore water pressure near the slip surface and rainfall characteristics are monitored. Two shallow slip sites have been monitored for over 2 years and the wireless monitoring modules have been upgraded. A deep-seated sliding site has been setup with pore pressure, surface inclination, and infiltration process measurements. A coupled hydro-mechanical analysis is performed to model both the hydraulic and mechanical responses of slopes. Combining the real-time monitoring of pore pressure and rigorous analysis, a customized, time-dependent warning system might be feasible.
Keywords:slope failure, wireless sensing module, coupled hydro-mechanical analysis, time-dependent warning system, internet of things
一、前言
山區公路邊坡崩塌時常導致人員損傷、交通中斷及經濟損失等。山區道路邊坡 崩塌主因為地震與降雨引致,其中降雨引致之邊坡破壞其發生頻率與範圍遠較地震 引致崩塌為高,且降雨引致之邊坡破壞具有一定之延時與前期徵兆,使得此類災害 之預警較為可行且易發揮成效。本研究針對公路邊坡可能遭遇之土層崩塌破壞進行 解析法分析並研發與解析法搭配之即時無線感測土層反應模組,發展不同於現有以 雨量監測為指標之經驗法預警模式,提高場址預警之準確與時效性,利於相關單位 對此類災害預警及管理之決策參考。
降雨引致公路土壤邊坡破壞依其滑動機制可分為淺層與深土層滑動,依水土保 持局山崩分類方法之地滑,其為發生於崩積土壤或崩塌岩屑,且以固體型態滑動之 破壞類型,二種邊坡破壞其滑動機制與致災因子顯著不同,因此其解析程序及對應 之崩塌預警模式亦應分開考慮。本研究之淺層滑動定義為發生於非飽和區,其機制 為因降雨入滲使非飽和土壤基質吸力降低,非飽和土壤強度降低而產生滑動;深土 層滑動定義為滑動面發生於飽和區,其力學平衡因地下水上升及滲流影響,使其孔 隙水壓增加導致土壤強度降低,且下滑力因增加滲流應力而增加,導致邊坡滑動。
二種邊坡破壞其滑動機制與致災因子顯著不同,因此其解析程序及對應之崩塌預警 模式亦應分開考慮,淺層滑動之研究於前期研究已具成果,本研究以降雨引致深土 層崩塌為研究對象。
現今對邊坡預警之趨勢為整合考慮地形、地質材料特性與水力行為之場址破壞 機制分析,搭配即時監測相關引致滑動之土壤物理量與地層運動之預警系統。此類 預警技術包含兩部分,其一為藉由地質探勘與地形測量,建立場址地質模型並據以 進行解析法分析,預測其滑動機制、範圍及不同階段警戒值;其二為佈設監測硬體 於反應敏感之位置,進行即時土層監測並發佈警報。目前以數值方法進行崩塌機制
護困難等瓶頸,因此發展具備即時無線土層監測之模組化系統,對於推廣以解析法 為依據之公路邊坡降雨崩塌預警系統具重要關鍵。
本計畫目的為結合嚴謹力學概念為基礎之解析法與邊坡無線土層監測模組,考 慮地形幾何、地質構造、水文特性、材料力學行為之影響,發展場址客製化深層滑 動公路邊坡降雨崩塌預警系統,利用建立之場址地質模型進行水力力學耦合邊坡滑 動分析,考慮水力與力學邊界,模擬崩塌滑動之過程與影響範圍,預測邊坡依時性 反應,除作為土層反應監測模組佈設及制定警戒值之依據外,因可預測邊坡之滑動 面、滑動歷時等,故預警精度、正確性、滑動時間及滑動體積皆可評估,可用來改 善預警精度、建立依時預警模式與減災設施規劃等。
針對深層滑動機制分析,本年度之主要目標為完成水力力學耦合之邊坡極限平 衡與數值模擬,關鍵為選定適合之研究場址。深層滑動測試場址須具備下列條件,
其場址坡角小於土壤有效摩擦角、土層厚度大於數公尺且現場地下水系發達,而為 進行分析模式驗證,以具有完整現地調查資料與觀測值之場址為佳,候選場址將於 下一節說明。選定場址將進行考慮入滲之滲流分析,結合滲流分析與極限平衡分析 可進行與(Collins and Znidarcic, 2004)近似之臨界破壞深度與破壞包絡線分析,預測 可能破壞之時間,另以現地資料建立水力力學耦合數值分析模型,藉由更新土壤有 效應力彈性模數及強度變化,預測不同位置地表位移量分布及位移時間歷時,作為 無線監測模組佈設及由地表運動量或水力反應推算破壞時間。
本年度計畫工作項目尚包括現有淺層崩塌場址持續觀測與監測模組精進,目前 運研所於前期計畫已建置甲仙攔河堰通達道路邊坡及國道三號西湖休息區邊坡兩處 淺層滑動觀測場址,此兩場址為本研究團隊協助建置,2018 年度完成以運研所原有 低成本易安裝之深層滑動無線監測模組為基礎,精進模組間通訊、電源及雲端顯示 介面,提供穩定可靠之深飽和滑動監測與預警模式之即時觀測值,並於選定場址進 行監測模組原型現地測試。
二、 深層無限邊坡水力力學耦合穩定分析理論
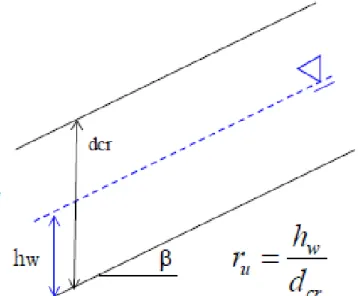
傳統無限邊坡深層滑動分析,以圖 2.1 所示其安全係數計算為:
' tan '
( )
sin cos tan
sat w u
sat cr sat
r FS c
d
(2.1)
式中 u w
cr
r h
d 為孔隙水壓比,h 為地下水位上升之總水頭高,包含靜水壓力與滲流w 引致之孔隙水壓。不考慮平行滲流時(r u 1.0),則式(2.1)可簡化為:
' 'tan ' sin cos tan
sat cr
FS c
d
(2.2)
式中' 為滑動面土壤浸水單位重。考慮平行滲流時,則ru 大於 1,造成安全係數 降低直至破壞,其應力變化如圖 2.2 所示(Anderson and Sitar, 1995)。
臨界滑動面土壤孔隙水壓力對深層土壤無限邊坡穩定具有重大之影響,因此掌 握孔隙水壓變化可有效推估現地邊坡穩定性並作為依時預警之指標。因 ru為時間之 函數,若可由量測資料進行統計分析,或以整體集水區水文解析,建立孔隙水壓比 與降雨特徵之關聯,建立 ru預警值,結合現地水壓監測及深層無限邊坡水力力學耦 合穩定分析理論,可作為依時預警之架構。
圖 2.1 深層無限邊坡水力力學耦合穩定分析圖
圖 2.2 深層無限邊坡滑動應力狀態(Anderson and Sitar, 1995)
由於無限邊坡分析僅適用於一維案例,且無法得到位移分佈、大小與方向以及 時間歷時,不利於監測點決定及位移量預測,因此本研究將進行結合土中入滲滲流 分析及飽和土層非線性有效應力分析,利用相同的網格,於進行滲流分析時,將孔 隙水壓傳遞給相同網格之土壤進行力學分析,滲流分析之結果將用於更新飽和土壤 之彈性及強度,此程序可近似模擬水力力學耦合耦合分析。
為進行初始非飽和土層水力力學耦合分析,本研究以 FLAC 程式中之兩相流模 組(Two-phase flow module)進行初始非飽和到飽和滲流分析,並開啟力學分析功能,
於暫態滲流分析過程中同步進行力學計算,以有限差分型式進行非線性大變形模 擬,且力學計算中考慮土壤孔隙水壓力改變對有效應力之影響,更新土壤彈性參數 及強度,模擬初始非飽和土層邊坡因降雨引致之破壞過程。
分析時以修正之 Mohr-Coulomb 彈塑性組構模式,考慮其剪力強度(max )為:
max ( ua) tan S uw( a uw) tan c'
(2.3) 式中S 為水之飽和度,基質吸力(w
u
a u
w )以P 代表,其與水飽和度之關係c 以 van Genuchten (1980)建議之關係式表示如下:1/ (1 )
(S ) 0( a 1) a
c w e
P P S (2.3) 式中
a
為土壤常數,S
e為有效飽和度,其定義為:1
w r
e
r
S S
S S
(2.4) 式中S 為土壤殘餘飽和度,低於此值土壤水力與力學特性不再變化;r P 參考0 基質吸力,其值為:
0 wg P
(2.5) 式中w 為水之密度,
為土壤常數。非飽和滲透係數亦以常用之 van Genuchten (1980)準則表示,其與相對飽和 度之關係為:
(1 ) 2
1 (1 a )a
r e e
k S S (2.6) 式中
k
r為相對滲透係數,不同飽和度滲透係數( ( )k S ) 與飽和滲透係數ek
sat 關 係為:( )e r sat
k S k k (2.7) 分析時選用之力學邊界為兩側垂直邊界於水平向固定,底部則為雙向固定。水 力邊界則以底部為滲流邊界,坡頂表面設為保持飽和狀態並固定其孔隙水壓力為 0,設定初始基質吸力,初始飽和度為滑動土層之平均值,以此初始與邊界條件進行 水力力學耦合模擬,分析時監測上下邊坡交界處不同深度之反應。
以台 20 線 52k 監測場址二維維水力力學耦合分析為例,該場址分為崩積層 (Colluvium)及基岩(Bedrock),以圖 2.3 所示之網格,選用之力學邊界為兩側垂直邊 界於水平向固定,底部則為雙向固定。水力邊界則以底部為滲流邊界,坡頂表面設 為保持飽和狀態並固定其孔隙水壓力為 0,初始飽和度為崩積層之平均值,以此初 始與邊界條件進行水力力學耦合模擬,分析時監測上下邊坡交界處不同深度之反 應。因現地道路下邊坡存在背拉地錨擋土牆,上邊坡有石籠護坡,為適切模擬現地 狀況,本分析中包含擋土牆體以樑元素模擬,下邊坡牆體下方連結基樁元素,地錨 以 cable 元素模擬,相關結構元素均與現地土壤以介面元素連結。因缺乏實際結構 元素資料,因此結構元素主要為控制破壞區域使用,擋土系統模擬建議於後續研究 加入。
圖 2.3 數值分析模型
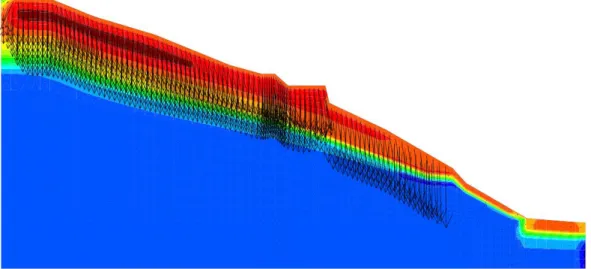
模擬初始階段孔隙水壓及水分子流動向量如圖 2.4 所示,水由表層開始以垂直 向下流動進行入滲(infiltration)及滲漏(percolatation),不同深度土層基質吸力降低,
當土層飽和後其基質吸力為 0 並產生正的孔隙水壓力,其值與深度相近,來源為靜 水壓,第二階段為當飽和土層達到一定厚度後開始產生約略平行坡面之滲流,此時 孔隙水壓因滲流大幅增加,且此時因孔隙水壓增加導致土體產生顯著運動。分析結 果顯示,使用現有使用參數及地質模型,位移向量及水平位移分布圖顯示鄰近道路 下方邊坡為位移量最大之地區,具有相對較高滑動潛勢。道路上方監測點位於不同 深度孔隙水壓時間歷時如圖 2.5 所示,結果顯示孔隙水壓因滲流而大幅增加,且此 時因孔隙水壓增加導致土體產生顯著滑動。分析結果顯示,使用現有使用參數及地 質模型,上邊坡預測於持續降雨入滲下於 2.6*105秒(約 3 日)產生破壞。
圖 2.4 入滲開始後 1.2*105秒後孔隙水壓分布與流動向量
圖 2.5 上邊坡監測點預測孔隙水壓歷時
以二維水力力學耦合計算分析飽和土層破壞有下列侷限:(1)無限邊坡中平行滲 流之影響不可忽略;(2)現地垂直入滲非為增加孔隙水壓之唯一因子;(3)地下水需考 慮整體集水區降雨與入滲特性;(4)土壤非均質與強度不確定性,為解決所列限制,
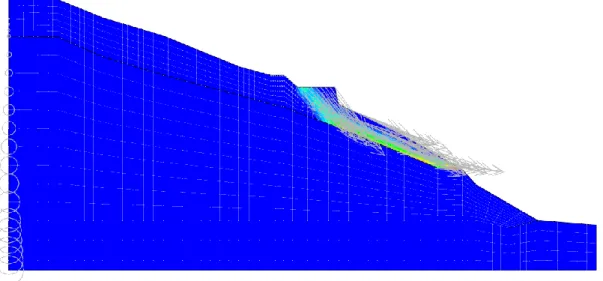
本研究後續將以長期水位觀測資料,建立場址地下水位升降與降雨前土壤狀態及降 雨特徵關聯,搭配非耦合邊坡穩定分析。採用圖 2.3 網格分析時取消大變形非線性 分析,於不同水位上升階段進行二維極限平衡分析,當下邊坡觀測點位水位上升 1.0m 時,安全係數為 1.01,滑動區域分布如圖 2.6 所示,滑動集中於下邊坡崩積層 與岩盤交界面。此結果與現地於 2018/08/23 降雨事件之反應相同,地下水位上升約 1.0 m,地表即有顯著變位,所觀測地下水反應與土層地表反應高度相似。
圖 2.6 非耦合分析下邊坡臨界滑動區域 三、無限邊坡依時預警架構
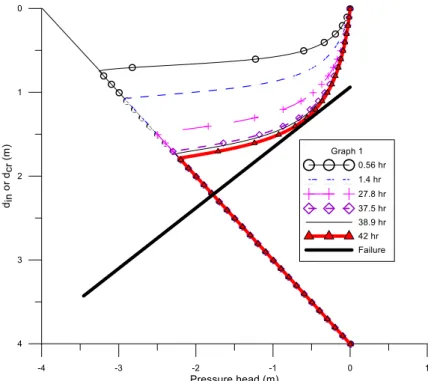
依時性邊坡預警系統可分為無限邊坡及二維水力力學分析,淺層滑動無限邊坡 依時預警以下列分析結果為例,若不同時間之水頭分佈及破壞包絡線如圖 2.7 所示,
破壞發生於地表飽和後 42 小時,滑動面深度為 1.5m,基質吸力與體積含水量之關 係由實驗結果或 VG model 推估,在 0.75m 深度以推估之破壞過程體積含水量依時 變化如圖 2.8 所示,由破壞時間(42 hr)往前推算可決定不同時間所對應之體積含水 量,以破壞前 24 小時為預警時間,則所對應之體積含水量為 0.22,現地於 0.75m 量測之含水量作為發布預警作為之依據,而不同階段預警值亦可由圖 2.8 推估。由 相關耦合分析結果顯示,以表層入滲行為與表層運動量監測推估破壞過程理論上可 行,相關表層無線監測模組可依此成果進行硬體規劃。相關理論於模型與數值分析 均已得到驗證,此架構應具一定之可信度。
應用於深層滑動依時預警時須進行適度修正,針對一維無限邊坡深層滑動,其 滑動面仍以極限平衡分析,但滑動面深度與時間則與滑動面所在孔隙水壓變化及入 滲後飽和土層滲流力大小有關,式(2.1)中之平行滲流力像須加以考慮,即飽和土層 中除靜水壓力外尚須考慮原有飽和土層滲流引致之超額孔隙水壓力之影響,基質吸 力效應則可忽略不計。
無限邊坡飽和土層滑動依時預警概念如圖 2.9 所示,以滑動面所在地下水位為 指標,利用式(2.2)計算不同水位對應之安全係數,定義 FS=1.0 為破壞,因此可推估 破壞時之水位,若現地水位升降歷時模式已知,則可求得破壞時對應之時間,以此 為基準,可定義破壞前不同時間之預警值。飽和土層依時預警關鍵為建立地下水位 升降歷時曲線,若僅考慮地表入滲貢獻,則可以單向入滲求解,但現地水位受上游 集水區滲流影響大,因此不易推估,因此解決之道為進行現地長期連續觀測,建立 降雨特徵與地下水位上升關聯性,本年度利用台 20 線 52k 資料,初步建立之關係如
圖 2.7 淺層滑動壓力水頭與破壞包絡線
圖 2.8 淺層滑動深度 0.75 m 體積含水量變化及依時預警概念
圖 2.9 飽和土層滑動依時預警概念
圖 2.10 台 20 線 52k 場址累積雨量與地下水位高度關係 四、深層水力力學反應無線感測模組
無線土層監測系統係由微控制器結合各感測器以及無線傳輸模組,裝置於待測 地點並持續透過無線傳輸將各感測器之量測資料送出。無線無線土層監測系統主要 組成包括感測元件(sensor)、微控制器(MCU)及通訊單元,此三部分須以韌體進行整 合,另外還包括附屬之外構、電源及接收端。本計畫以 Arduino 為監測端之微控制 器,選擇不同感測元件,發展不同監測目的之感測模組,規劃有觀測降雨入滲之分 層土壤水分計、地表傾角之高精度傾度儀(inclinometer)、開口豎井水位之壓力式液 位計(liquid level sensor)等,並以可形成區域通訊網路之 Xbee 建立感測模組間及與 接收端通訊,經由接收端連結現有 3G 通訊網路,達到遠端監測之功能。
及伺服器端,由客戶端將量測之現地資訊發送給伺服器端,伺服器端統一收集各節 點資料後,透過 WCDMA(3G)/GSM(2G)無線通訊模組將資訊上傳至遠端伺服器,各 監測模組同時備有記錄卡備份現地資料,達到對邊坡即時、無線、自動化監測目的。
本研究主軸為研發一同時適用於非飽和與飽和土壤,用以監測因降雨造成淺層 邊坡滑移之土層監測模組。在消費性電子產品大量使用下,微機電系統(Micro-Electro Mechanical-Systems,MEMS)感測器近來迅速發展,其具有體積微小、低耗電、低 成本以及通訊介面簡易等優點,系統感測器之種類與功能如下:
(1) 電容式土壤水分計(Capacitance moisture sensor):以非接觸式量測周圍環境 電容變化,透過感測器內嵌之 ADC (Analog to Digital Converter)進行數位 輸出,間接測得非飽和土壤之含水量。
(2) 傾斜儀(Tiltmeter):量測單軸向傾斜量變化,支援比例類比電壓與數位 SPI 輸出,提供軸向上高精度、靈敏度之傾斜角量測。
(3) 類比式壓力計(pressure sensor): 以電子薄膜式壓力計,量測開孔豎井液 位,以高精度 AD 模組與現有模組連結。
圖 4.1 系統架構示意圖
針對深層滑動主要為現地孔隙水壓力控制,因此將孔隙水壓量測整合於現有入 滲與地表運動監測模組為關鍵技術,為符合現地監測高精度、長期耐候與耐久之要 求,本研究將現有淺層監測模組增加傳統電子式類比液位計,以高精度 AD 模組與 現有模組連結。
深層監測模組以物聯網(IoT)之架構進行研發,由微控板(MCU)搭配數位類比擷 取卡(AD board)可連接傳統電子式感測器,配合 3G 模組(WCDMA)將監測資料送入 雲端,突破常用有線監測之模式,並允許使用者透過雲端即時查看監測資料,此監 測架構連結各式感測器形成局部(Local)或全域(Global)監測網路,可提供重大工程結 構管理者或工程師由即時監測數據(real time monitoring)進行決策。無線感測模組包
括(1)微處理器、(2)無線傳輸模組、(3)時鐘與數據儲存模組及(4)感測器,各部分說 明如下:
4.1 微處理器
因感測模組連接腳位較多,本研究採用 Wemos lolin32(圖 3.32),其為與 Arduino 相容開放原始碼之微處理器,搭載 ESP32 晶片,240MHz 雙核微控制器,運算數度 高達 600 DMIPS,16MB 程式設計空間,且具 34 支 GPIO 接腳,其中包含一組 SPT(Serial Peripheral Interface Bus)介面、一組 (Inter-Integrated Circuit)介面,I2C 支 援單一匯流排,最多可與 112 個結點通訊,足以應付多組模組間數位資料傳輸,以 及 12 支接腳可做為類比訊號接腳,滿足土層監測模組的功能需求。
4.2 電子式液位計
採用國產之沉水式液位計(liquid level transducer),此感測計為類比輸出,因此 感測模組需整合類比-數位轉換器(A/D converter),此計畫以 16bit 之 A/D converter 模組,以確保解析度達 1 cm 以下,室內校正結果如圖 4.2 所示,現有模組中使用之 液位計實驗室校正結果顯示其線性度佳。
圖 4.2 液位計實體與校正結果 4.3 感測模組
圖 4.3 為研發之深層無線感測模組內部元件圖,外構與淺層監測模組相同,電 池模組可透過電池與太陽能充電模組為系統提供電力,以供野外進行模組布設並可 維持太陽照度不足時之電源持續運轉系統,而無線監測模組,以 MCU 搭配傾斜晶 片、分層含水量計、液位計與無線傳輸等模組,可定時將數據傳送至全球網路,即 時感測(real time monitoring)推送監測數據至雲端。
4.4 雲端伺服器
近年物聯網的興起使各領域累積數據量急劇攀升,開發商也因應推出各種 IoT 資訊平台以滿足資料儲存與顯示的需求。Thingspeak 為 2010 年 IoBridge 開發用以整
(a)無線感測模組 (b) 電池模組 圖 4.3 深層邊坡無線感測模組內部組件圖
量之資料讀寫功能讓使用者免費使用,並透過 API(Application Programming Interface) 作資料存取、匯出以及視覺化展示等功能,因此本研究以 Thingspeak 作為系統雲端 伺服器,形成現地監測資料之雲端即時顯示平台。Thingspeak 雲端即時顯示頁面,
依序顯示該測站之節點編號、傾斜角、淺層土壤體積含水量、淺層土壤溫度、深層 土壤體積含水量、深層土壤溫度、水位以及模組電壓,游標移至資料點上即可獲知 該監測值及其量測時間,用以展示及時監測成果,而平台也提供歷史資料輸出功能,
其副檔名為 csv 格式,可用 Excel 直接開啟。
4.5 深層滑動模組測試成果
為進行深層滑動無線感測模組原型現地測試,需選定潛在深層滑動場址,適宜 之場址須符合下列條件:
(1) 現地需具有厚層軟弱土壤,坡角小於土壤有效摩擦角,地下水位高或入滲 速率快,臨界破壞面為飽和土層之深層破壞。
(2) 具有相關幾何、水文及地質參數,並儘可能有現地監測資料參考。
(3) 須為鄰近道路之邊坡,且具高破壞潛勢或有破壞歷史。
(4) 鄰近具有通訊訊號,以進行雲端資料傳輸。
由於本年度研究標的為飽和層土壤邊坡破壞,此雖為台灣常見之災害類型,但 進行解析法分析需有一定解析度之地形幾何與詳盡之地質材料參數資料,此類資料 並不見於現有資料庫,經公路總局第五工程處同意,選定台 20 線 52k+150 處為監 測場址,並於雨季前完成監測系統建置。
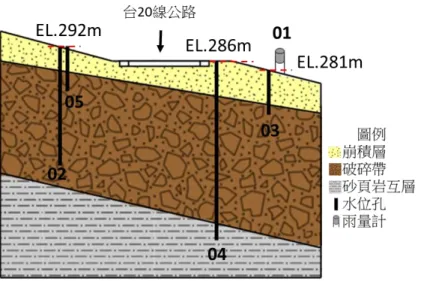
本研究計於台 20 線 52k+150 處裝設五組無線監測站,與一組伺服器端,各監 測站之資訊如表 4-1,位置配置圖與剖面示意圖如圖 4.4 與 4.5 所示,ID 01 測站為 雨量計,位於道路下邊坡,經現地探勘,考量雨量計裝設需求、裝設難易度及人員
通達便利性後,此處位較適宜之場地;ID 02 與 ID 04 測站分別位於道路上下邊坡,
02 與 04 測站之液位計裝設深度皆約 35m,為量測位於破碎帶與砂岩間的侷限含水 層水位;ID 03 與 ID 05 測站分別位於道路下邊坡與上邊坡,為本計畫新增孔位,ID 03 與 ID 05 測站之液位計深度皆約 11m,量測位於崩積層之自由含水層;伺服器端 現場安裝於光照良好處, ID 02 與 ID05 測站太陽能板亦安裝於此。
表 4-1 測站資訊表
ID 配置 水位孔深度 水位孔高程
01 雨量計 無 無
02 液位計 40 m 292m
03 液位計、含水量計、傾斜儀 11 m 281m
04 液位計 60 m 286m
05 液位計、含水量計、傾斜儀 11 m 292m
圖 4.4 監測儀器配置圖
台 20 線 52k 之無線土層監測系統於 2018/05/25 安裝完畢,歷經梅雨季,監測 成果如下:
(1) 現地降雨觀測成果
場址安裝至今所經歷之降雨事件與雨量記錄顯示與鄰近甲仙雨量測站之記錄對 比可發現降雨事件幾乎相同,但有局部降雨事件與降雨強度差異,本研究後續資料 分析皆使用 ID 01 雨量計之降雨量,以反應真實之現場情況。
圖 4.5 監測剖面示意圖 (2) 地下水位觀測成果
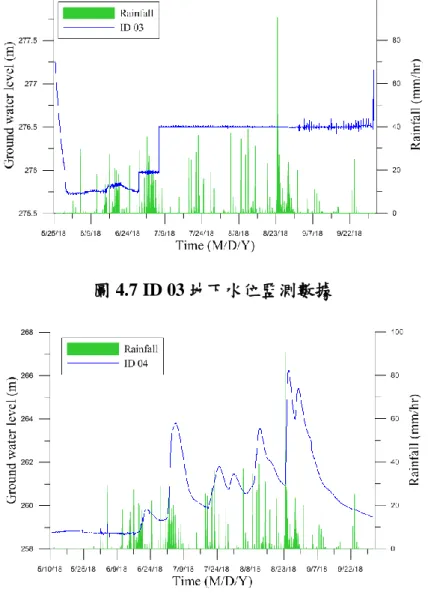
圖 4.6 至圖 4.9 為各測站之地下水位監測圖,ID 02 與 ID 04 監測值於乾季為水 位較低狀態,偶有降雨,但降雨量或降雨延時未達其入滲門檻值,水位並無變化,
而梅雨季期間,長時降雨使孔內水位升高,符合過往監測記錄;ID03 測站初期水位 為鑽探施工的殘餘水位,施工完成後即快速消散,此孔於梅雨季期間,水位僅些微 上升,推測因此孔位於道路下邊破,臨近坡面可快速排水,導致崩積層內水位難以 蓄積;ID05 測站初期亦有殘餘水位,施工完成後即快速消散,而此孔於梅雨季期間 水位迅速上升,顯示上邊坡之崩積層內有自由地下水層且易蓄水,極可能發生因地 下水位上升,孔隙水壓增加使土壤強度降低,導致邊坡滑動。
圖 4.6 ID 02 地下水位監測數據
圖 4.7 ID 03 地下水位監測數據
圖 4.8 ID 04 地下水位監測數據
(3) 表層體積含水量與傾斜儀觀測成果
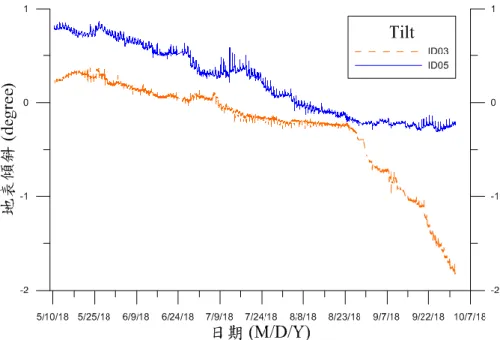
圖 4.10 與圖 4.11 為 ID 03 與 ID 05 測站含水量監測結果,感測器對降雨事件反 應敏感,在降雨事件後逐步降低,顯示感測器具有重複性,可用於長期監測。圖 4.12 為傾斜儀監測結果,顯示於此段觀測期間上邊坡 ID05 有約 1 度之變化,此與道路 旁石籠輕微外推現象吻合,顯示表層有輕微變位;下邊坡 ID03 其傾角於 2018/08/23 起之降雨事件中累積傾角達到 2 度,顯示下邊坡有顯著變位,經檢視現場鄰近擋土 牆底部有縫隙產生,邊坡土層有明顯變位,顯示下邊坡可能已產生破壞,下邊坡相 關監測資料將做為數值分析之佐證資料。線有成果顯示深層監測模組架構已具一定 完整性,以測試目的而言,符合原先規劃。
圖 4.10 ID 03 體積含水量監測數據
圖 4.11 ID 05 體積含水量監測數據
圖 4.12 測站傾斜角監測數據 五、結論
本年度計畫要項為飽和層滑動解析法分析架構建立及無線監測模組設計與整合 測試,將來以訂定場址於破壞不同階段之警戒值,發展客製化公路邊坡降雨深層崩 塌預警系統架構。本年計畫執行結論摘要如下:
(1) 淺層滑動監測場址維護:針對現有兩處淺層滑動監測場址,檢視必要量測 量,進行更新或修復,並持續進行監測與資料彙整。
(2) 飽和層滑動場址監測系統優化:飽和層滑動無線監測模組中最重要之元件 為地下水位量測,此部分已完成並佈設進行現地測試,且模組已具有無線 即時監測所需之所有功能,現有結果顯示系統取樣傳送頻率及通訊具有一 定穩定性與可靠度。
(3) 維護與精進運研所所已架設之公路土壤邊坡淺層崩塌監測無線感測網路模 組 2 處場址:原有甲仙及西湖場址,除持續進行監測與現地測試,已更新 相關硬體,增加雲端監看功能,大幅精進現有模組穩定與應用性。
(4) 飽和層滑動監測資料處理:飽和層滑動監測系統資料中最重要指標為地下 水位變化,此與現地幾何及材料水力邊界與特性有關,且計畫目標之一為 由監測資料推估建立降雨特徵對地下水位變化模式,相關資料處理程序已 建立並有初步成果。
(5) 飽和層滑動場址極限平衡分析:飽和層滑動極限平衡理論推導與傳統以有 效應力參數及地下水位升降相同,但為配合入滲與地下水位及平行滲流影 響,須將降雨入滲與極限平衡連結,相關公式已推導完成。
參考文獻
1. 青山顧問有限公司(2006),台 18 線 28.9K~31.5K(五彎仔)地滑區調查、整治規劃 及安全評估地滑地區補充監測執行總報告,交通部公路總局第五區養護工程處。
2. 陳志芳、謝明志、張文忠、黃安斌、許智超、周仕勳、趙慶宇、甯敘堯 (2017),
公路邊坡崩塌監測之無線感測網路模組研發(2/2),交通部運輸研究所。
3. Anderson, S.A., and Sitar, N. (1995). “Analysis of rainfall-induced debris flows.”
Journal of Geotechnical Engineering, 121(7), pp. 544-552.
4. Collins, B.D., and Znidarcic, D. (2004). “Stability analyses of rainfall induced landslides.” Journal of Geotechnical and Geoenvironmental Engineering , 130, pp.
362–372.
5. Fredlund, D. G. and Rahardjo, H. (1993). “ Soil mechanics for unsaturated soils. ” New York, Wiley.
6. Fredlund, D. G., Morgenstern, N. R. and Widger, R. A. (1978). “The shear strength of unsaturated soils.” Canadian Geotechnical Journal, 15(3), pp.313-321.
7. Huang, A.B., Lee, J.T., Ho, Y.T., Chiu, Y.F., and Tsai, T.L. (2009) “Field monitoring of pore-water pressure profile in a slope subjected to heavy rainfalls,” Proceedings, XVII International Conference on Soil Mechanics and Geotechnical Engineering, Alexandria, Egypt, pp.1931-1934.
8. Richards, B. G. (1965) “Measurement of the Free Energy of Soil Moisture by the Psychrometric Technique Using Thermistors.”, in Moisture Equilibria and Moisture Changes in Soils Beneath Covered Areas, A Symp. in Print. Australia: Butterworths, pp. 39-46.
9. Uchimura, T., Towhata, I., Trinh, T. L. A., Fukuda, J., Bautista, C. J. B., Wang, L., Seko, I., Uchida, T., Matsuoka, A., Ito, Y., Onda, Y., Iwagami, S., Kim, M. S., and Sakai, N. (2010): “Simple monitoring method for precaution of landslides watching tilting and water contents on slopes surface”, Landslides, 7:351–357
10. Varnes, D. J. (1978). “Slope movement types and processes.”, In: Special Report 176:
Landslides: Analysis and Control (Eds: Schuster, R. L. & Krizek, R. J.),
Transportation and Road Research Board, National Academy of Science, Washington D. C.,pp. 11-33.
11. van Genuchten M. (1980). “A closed-form equation for predicting the hydraulic conductivity of unsaturated soils.” Journal of Soil Science Society od America, 44, pp.
892–898.