強制振動下轉子/靜子交互作用之數值研究
9
0
0
全文
(2) 值,交界處網格之選擇受到較大的限制。對 區域交界面處之邊界處理,除 Rai 外另有 Giles [ 2 ] 及顏 [ 3 ] 等之方法。Giles 使用剪 性網格 (Shearing Cells) 及時間傾斜計算面 (Time-Inclined Computational Plane)之觀念, 來探討轉子/靜子交互作用之流場。顏 [ 3 ] 在無結構性網格上建立補綴邊界處理方法, 同時兼顧守恆性及準確性。除了上述文獻之 研究外,渦輪機非穩態流場分析在許多文獻 上已有深入之探討,例如 Giles [ 4 ] , Sharma et al. [ 5 ] , Doorly & Oldfield [ 6 ] 及 Yang et al. [ 7 ] 等。這些文獻中,主要在研究葉片尾 流/震波及轉子/靜子之交互作用等。當考慮 葉片振動時,目前之文獻(例如 Gerolymos [ 8 ] , He [ 9 ] ,Bendiksen [ 10 ],Huff [ 11 ] 和 Hwang & Yang [ 12 ] 等)大部份只探討單 一列葉片之流場,而未考慮轉子/靜子交互 作用之存在 。 Gerolymos [ 8 ]提出當葉片受 振動時,網格為適應其變形之處理步驟。此 種非線性步驟,其最大特徵是可作大位移來 配合網格因葉片振動所產生格點位置的變 化。為節省 CPU 時間,He [ 9 ] 提出小範圍 動態格點的技巧,限定只有在環繞葉片附近 之格點可以變形。在多重 Cascade 葉片中, Bendiksen [10] 以 H-mesh 處理葉片翼前緣 處網格受振動之變化。Huff [ 11 ] 以 C-grid 環繞葉片來調整因葉片振動後新格點之位 置,使其網格不致因振動而產生交錯的現象。. accuracy and reliability of the present scheme when the moving zone and dynamic grids are existed. Then, the rotor/stator interaction flow phenomena and the related aerodynamic behaviors are investigated, where the stator is oscillated with different values of periods. Keywords:Forced Vibration, Rotor/Stator Interaction, TVD Finite Volume Scheme, Unstructured Mesh 二、緣由與目的 在航空或工業用渦輪機之發展上,常因 材料疲勞而造成葉片斷裂。造成這種現象的 一個主要原因是葉片產生振動(顫振或強制 振動),而葉片振動往往是非穩態空氣動力作 用其上之故。在渦輪機中,轉子/靜子間之 相對運動及葉片本身振動將使得流場現象變 的十分複雜。為了解複雜流場之物理現象及 相關之氣動力特性,發展一套模式來預測轉 子/靜子在強制振動下之交互作用行為是一 必需且價值的工作。由於近年來計算機及數 值計算法之迅速發展,本研究將區域隱式有 限體積法結合相對運動區域交界面之處理與 動態格點法來求解具移動網格效應之歐拉方 程式,以探討強制振動下轉子/靜子交互作 用之問題。 對於本計畫所探討之問題,如果使用單 一區域格點,則轉子與靜子交界面附近之網 格會因其相對運動而扭曲進而產生不準確之 數值結果。一般常用的解決方法係將格點區 分成兩部分,但如何有效解決交界面通量守 恆 (Flux Conservation) 與變數連續性則是另 一重要之問題。Rai [ 1 ] 在補綴格點(Patched Grid)上發展一種顯式區域數值法(Explicit Zonal Scheme),以處理交界面上通量守恆之 問題。此顯式區域數值法能夠保持交界面處 之通量守恆,且所需的 CPU 時間少。然而為 準確求得各區域交界處輔助網格上的變數. Hwang & Yang [ 12 ] 運用改良式高斯-西德 法(Gauss-Seidel)來求解靜力平恆式。在動態 格點計算中,內部疊代至收斂方才決定新格 點的位置,並以幾何守恆定律來描述因網格 運動而產生的通量變化。接著利用區域隱式 有限體積法在動態三角形網格上求解歐拉方 程式,以探討振動串聯葉片之流場現象。 三、研究方法 為著有效且準確的探討葉片振動下轉. 2.
(3) 子/靜子交互作用非穩態流,其採用之研究方 法必需具有下列特性:(1)轉子/靜子交界面處 之網格不可扭曲,且在此交界面之通量守 恆;(2)葉片振動下之網格不可過度扭曲或交 錯;(3)數值計算法需考慮因格點移動所產生 之通量變化,且時間及空間準確(包含流場中 有震波存在時)。經由上述描述,本計畫在四 邊形和動態三角形網格上建立一套可靠之歐 拉方程式求解法。有關統御方程式、有限體 積法、邊界處理與動態格點法等討論如下: 統御方程式 為模擬強制振動下二維非黏性轉子/靜 子交互作用流場,具移動網格效應之二維非 穩 態 歐 拉 方 程 式 (Euler Equation) 是 被 採 用: ∂ ∫ U dA + ∫ F ⋅d l = 0 ∂t Ω ∂Ω. (4)式中之參數如文獻 13 與 14 所示。 利用雙參數法且將通量函數予以泰勒級 數展開,可得下列線性化方程式: Li (∆ U. −. . CK. 對四邊形網格. k =1. [(. ). 1 IN ∑ F i + F k ⋅ d l ik − Rik φ ik 2 k =1. ⋅ d l . n. n +1. n − d l . (5). . θ. =. θ M 2 (1 + β ) n. IN. . . ∆α . ik. − R ik Ψ. . (Λ ik ) R ik− 1 1 − . ∆ α ik ∆ α ik. . n. n. . n +1 . ik. 而得。除了自由流測試外,本計畫所探討之 轉子/靜子交互作用流場皆為超音速流。對 於超音速流,因為流場的訊息只往下游傳 遞,故所有變數在入口邊界條件被給定。而 在出口邊界上,流體的靜壓、密度與速度分 量皆由相鄰之內部網格外差而得。由於振動 情形的加入,所定義的週期由其特性不同, 將分成為滿足空間週期性的移動週期 (Tm) 和上下擺動所產生的振動週期 (Tv)。前者係 指轉子移動兩葉片間距離所需的時間;後者. (3). ]. ). 為求解(5)式,採用修正型高斯-西德(Modified Gauss-Seidel)數值法[13, 14]。在求解疊代過 程中,先由第一個網格掃至最後一個網格, 再從最後一個網格回掃至第一個網格。有關 此數值法之詳細描述請參閱文獻 13 和 14。 邊界處理 葉片表面假設為絕熱,且垂直於表面上 的流體速度分量為零。其他變數如平行面上 之速度分量、密度及壓力,由內點直接外差. 表為: ∑ ( F ⋅d l )ik =. k. . 利用區域隱式全變量遞減有限體積數值法 [13,14],上式中之 Q i (U ) 在卡式座標系統中可 IN. n +1. M ikn = ∂ F ⋅ d l ∂U. , i i. (. IN θ ∑ Fi + F k 2 (1 + β ) k =1 . ik A + ∑ M ik + Rik Ψ (Λ ik ) Rik−1 1 − CI = I 2(1 + β ) k =1 ∆αik ∆t i . (2). 對三角形網格. U n −1 ∆ An −1 ∆t i. 且. k =1. 3 IN = 4. An ∆ U n −1 ∆t i. k =1. 其中數值通量函數 (Numerical Flux Function) Qi (U ) 表示如下: ∑ ( F ⋅ d l ) ik. ( ). IN. 而 dl 則是沿著積分路徑上的微小距離。至於 U,E 和 G 請參閱文獻 13。 有限體積法 對任意三角形或四邊形網格 i ,(1)式可 改寫為:. IN. 1 β Q Un + 1+ β i 1+ β. L i ( ∆ U n ) = CI ∆ U in + ∑ CK k ∆ U kn. 界。 F = E i + G j ,d l = ndl 和 n 係單位法向量,. )=. =−. 其中. 上式中,Ω與 ∂Ω 分別代表流場之區域與邊. Q i (U. ) = Re s in. n ∆ An β + − U ∆ t 1 + β i. (1). ∂ ( UA ) i = − Q i ( U ) ∂t. n. (4). 3.
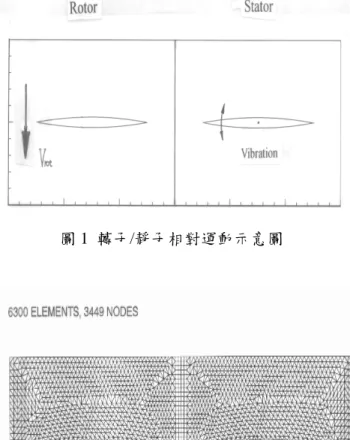
(4) α I = 2.51 deg 和 K = 0.0814。此測試所用之. 則是靜子由開始振動之起始位置,經一段時 間後回擺到起始位置所經過的時間。本計畫 在計算區域之上下邊界(圖 1)採用空間上的 週期性邊界條件,至於在區域交界面附近(圖 1, 2),Rai [ 1 ] 的顯式區域數值法被應用至網 格中心有限體積法上以處理交界面兩邊通量 傳送問題。 動態格點法 在本計算中,非結構性三角形與結構性 四邊形網格之混合系統被應用於二維非黏滯 流場。為容易且準確的處理非穩態轉子/靜 子交互作用流場交界面之通量守恆,在區域 與區域間附近共建立四排四邊形網格(圖 2)。為求得葉片振動時之瞬間網格位置,本 研究採用修正型高斯-西德法求解靜力平衡 方程式 [13]。隨著葉片之振動,網格的形狀 將會改變,因此必須小心處理通過網格邊界 之通量值。 Thomas 與 Lombard [ 15 ] 及 Vinokur [ 16 ] 所提出之幾何守恆律是被採 用。. 網格系統包含單一區域,共有 6300 個網格 及 3449 個節點(圖 2)。由圖 3 收斂情形確定 動態網格法在單一區域(無交界面處理)翼剖 面上下擺動時之可靠性。 接著設靜子與轉子之翼剖面為拋物線弧形,網格系統分成兩個區域(圖 2)。區域一 (轉子部份)包含 3154 個網格及 1747 個節 點,區域二 (靜子部份) 包含 3146 個網格及 1743 個節點。首先將區域一與區域二之入出 口邊界、週期性邊界和翼表面上的流體變數 定為自由流場之流體性質,而處理靜子振動 模式與上述的方法相同。與上一測式不同, 入口馬赫數定為 1.5 和區域-轉子以 0.1 馬赫 的速度向下移動。由圖 4 的收斂情形可確認 本數值法在結合交界面處理與靜子擺動時之 可行性。 轉子與強制振動下靜子間之交互作用 在本計算中,轉子與靜子之翼剖面仍設 為拋物線-弧形。在靜子部份作振幅為 1 度 大小的上下擺動,而入口流之流體速度仍維 持在 1.5 馬赫和轉子部份仍以 0.1 馬赫的速度 向下位移。求解非穩態歐拉方程式且結合區 域間交界面之處理與區域二靜子振動之動態 網格技巧可探討受強制振動下靜子與移動轉 子間之交互作用及相關之物理現象。本計畫 中,以移動週期的時間與擺動週期時間相同 (Tm=Tv) 、 移動週期的時間為擺動週期時. 四、結果與討論 自由流測試 為評估本數值方法的可行性,進行下列 兩種自由流之測試。首先在轉子不動下,為 評估具拋物線-弧形翼剖面之靜子振動情 形,取 1/2 弦長 (chord) 位置為基準點做上 下擺動,其表示如下:. α = α o + α I sin (ωt. ). 其中 α , α 0 , α I , 和 ω. 間的一半 (Tm=1/2Tv) 和移動週期的時間為 擺動週期時間的二倍 (Tm=2Tv) 等三種不 同組合進行計算。 圖 5 為靜子上、下表面中點 (Midpoint) 壓力隨時間的變動情形。為使移動週期與擺 動 週 期 時 間 相 同 (Tm=Tv) , 此 時 K = 0.2076,也就是一個移動週期的時間與振動 週期的時間同為 10 秒鐘。在 Tm/Tv=1 時, 可明顯看出大約在第二個週期開始後,壓力 分佈逐漸形成週期性的變動。此外,由 圖. (6) 分別代表瞬時. 攻角、平均攻角、振幅和振動頻率。振動頻 率 ω 與訂正頻率(Reduced Frequency) K 的關 係式為 K = ωc 2V ∞ ,其中 c 為弦長。此測 試全流場馬赫數定為 0.755, α 0 = 0 deg, 4.
(5) 5(a) 得知,當 Tm/Tv=0.5 時靜子上表面中 點之壓力值分別在奇數 (1,3,5.....) 移動週期 數 (Tm) 時,有相同之壓力值。由此可得知 其形成週期性的時間為 Tm/Tv=1 時間的兩 倍;同理,Tm/Tv=2 其形成週期性的時間為 Tm/Tv=1 時間的一半。 圖 6 為靜子之 (a) 升力係數及 (b) 力矩 係數分佈圖。由 (a) 圖上可看出,靜子受上 游轉子向下位移的影響,升力值在靜子擺動 最低處有降低且扭曲的情形且在最高處 ( α = 1.0 deg)之升力值亦有大量減低的現象 產生。在圖(b)之力矩係數圖同樣也有分佈曲 線不規則的現象,特別是在靜子攻角為-1.0 度處力矩係數分佈有大量減低的現象產生。 由此可得知在靜子處流體性質,強烈地受前 方轉子位移的影響。 圖 7 至圖 10 為轉子/靜子在不同相對位 置的流場等壓圖。在不同瞬間與文獻 [ 17 ] 所得結果(非強制振動)比較,可看出源自轉子 尾端的斜震波傳遞至兩區域間時,並不會因 轉子移動而產生不連續的情形。轉子尾緣的 斜震波會因為轉子的位移逐漸與靜子上端的 斜震波接近,而靜子上擺的作用則加快兩震 波交會的時間。隨著轉子的下移,來自轉子 後緣的兩斜震波交會點,慢慢的由靜子上表 面移至下表面附近。由於靜子下擺使靜子端 的有效攻角為負值,使得靜子下表面的震波 因膨脹的效應而減弱,上表面則有震波交會. 驗證本計畫所提方法之可行性及正確性,先 以兩種自由流經過振動靜子與移動或靜止轉 子來作測試。接著由超音速流經過移動轉子 與振動靜子之等壓線圖,可確定本數值法可 正確處理交界面處之接合情形。為進一步了 解強制振動與轉子位移對靜子氣動力的影 響,則可由升力係數與力矩係數分佈說明其 變化情形。在本計畫也探討移動週期與擺動 週期的關係,由靜子上、下表面之壓力值得 知壓力分佈仍具週期性且隨移動週期與擺動 週期變化而有所影響。最後,由流場之等壓 線圖可得知震波之變化及靜子部份之流場受 到移動轉子與強制振動之影響。總之,本計 畫預期之工作項目皆已完成。 六、參考文獻 [1] Rai, M. M., “A Conservative Treatment of Zonal Boundaries for Euler Equation Calculation,” Journal of Computational Physics, Vol. 62, Feb. 1986, pp. 472-503. [2] Giles, M. B., “Stator/Rotor Interaction in a Transonic Turbine,” Journal of Propulsion and Power, Vol. 6, No. 5, Sept.-Oct., 1990, pp. 621-627. [3] 顏隆文,“無結構三角形網格上轉子/靜子 之 Euler 解”,成大航太所碩士論文, 1993。 [4] Giles, M. B., “Calculation of Unsteady Wake/ Rotor Interactions,” AIAA Paper 87-0006, Jan. 1987. [5] Sharma, O, P., Butler, T. L., Renand, E., Milsaps, Jr., K., Dring, R. P., and Joslyn, H. D., “Rotor-Stator Interaction in Multi-Stage Axial Flow Turbines,” AIAA Paper 88-3013, July 1988. [6] Doorly, D. J., and Oldfield, M. L.G., “Simulation of the Effects of Shock Wave Passing on a Turbine Rotor Blade,” ASME Journal of Engineering for Gas Turbines and Power, Vol. 107, Oct. 1985, pp. 998-1006. [7] Yang, R. J., Lin, S. J., and Rai, M. M.,. 集中的現象;反之,上擺的作用會使上表面 會有膨脹效應的生成。 五、成果自評 在本計畫中使用區域隱式積分法與動態 格點法來模擬強制振動下靜子/轉子之交互 作用行為。在區域交界面之邊界處理上,則 是以 Rai 之虛擬網格的觀念來達到通量守 恆。修正型高斯-西德隱式數值法被用來求 得在靜子小角度強制振動下之網格分佈。為. 5.
(6) “Unsteady Aerodynamics of Rotor-Stator Interaction in a Turbine Stages,” AIAA Paper 88-0360, Jan. 1988. [8] Gerolymos, G. A., “Numerical Integration of the Blade-to- Blade Surface Euler Equations in Vibrating Cascades,” AIAA Journal, Vol. 26, No. 12, pp. 1483-1492, 1988. [9] He, L., “An Euler Solution for Unsteady Flows Around Oscillating Blades,” ASME Journal of Turbomachinery, Vol. 112, No. 4, pp. 714-722, 1990. [10] Bendiksen, O. O., “Euler Calculations of Unsteady Transonic Flow in Cascades,” AIAA Paper 91-1104, 1991. [11] Huff, D. L., “Numerical Analysis of Flow Through Oscillating Cascade Sections,” Journal of Propulsion and Power, Vol.8, No. 4, pp. 815-822, 1992. [12] Hwang, C. J., and Yang, S. Y., “ Euler Solutions for Transonic Oscillating Cascade Flows Using Dynamic Triangular Meshes,” Transactions of the ASME, Journal of Turbomachinery, Vol. 117, No.3, July 1995, pp. 393-400. [13] Hwang, C. J., and Yang, S. Y., “Locally Implicit Total Variation Diminishing Schemes on Mixed QuadrilateralTriangular Meshes,” AIAA Journal, Vol. 31, No. 11, 1993, pp. 2008-2015. [14] Hwang ,C. J., and Liu, J. L., “Locally Implicit Total - Variation - Diminishing Schemes on Unstructured Triangular Meshes,” AIAA Journal, Vol. 29, No. 10, 1991, pp. 1619-1626. [15] Thomas, P. D., and Lombard, C. K., “Geometric Conservation Law and Its Application to Flow Computations on Moving Grids,” AIAA Journal, Vol. 17, No.10, 1979, pp. 1030-1037. [16] Vinokur, M., “An Analysis of FiniteDifference and Finite-Volume Formulations of Conservation Laws,” Journal of Computational Physics, Vol.. 81, No.1, 1989, pp. 1-52. [17] 楊政勳,“轉子/靜子非穩態流交互作用之 數值研究,”成大航太所碩士論文,1993。. 圖 1 轉子/靜子相對運動示意圖. 圖 2 拋物線-弧形轉子/靜子網格圖. 6.
(7) (b). 圖 3 拋物線-弧形靜子振動下自由流測試之數 值收斂圖 (M ∞ = 0.755, α I = 2.51 deg, 圖 5 靜子(a)上表面中點處與(b)下表面中點處壓. and k = 0.0814). 力隨時間變化圖. LOG(L2-norm) T/Tm 圖 4 結合拋物線-弧形轉子位移與拋物線-弧 形靜子振動之自由流測試的數值收斂圖 (a). 圖 6 (a) 升力係數分佈圖與 (b) 力矩係數分佈圖 ( M ∞ = 1.5, α I = 1.0 deg and K = 0.2076). 7.
(8) 圖 8 瞬時等壓線圖 (T = 4.25Tm): (a) 非強制振 圖 7 瞬時等壓線圖 (T = 4.0 Tm): (a) 非強制振. 動,(b) Tm = Tv,(c) Tm = 1/2Tv and (d) Tm. 動,(b) Tm = Tv,(c) Tm = 1/2Tv and (d) Tm. = 2Tv. = 2Tv. 8.
(9) 圖 9 瞬時等壓線圖 (T = 4.5Tm): (a) 非強制振. 圖 10 瞬時等壓線圖 (T = 4.75Tm): (a) 非強制振. 動,(b) Tm = Tv,(c) Tm = 1/2Tv and (d) Tm. 動,(b) Tm = Tv,(c) Tm = 1/2Tv and (d) Tm. = 2Tv. = 2Tv. 9.
(10)
數據



相關文件
[對數律 law of logarithm] 給定 x, y
In particular, we present a linear-time algorithm for the k-tuple total domination problem for graphs in which each block is a clique, a cycle or a complete bipartite graph,
[4] Hiroyuki, O., “Sound of Linear Guideway Type Recirculating Linear Ball Bearings” , Transactions of the ASME, Journal of Tribology, Vol. Part I: design and Construction” ,
請繪出交流三相感應電動機AC 220V 15HP,額定電流為40安,正逆轉兼Y-△啟動控制電路之主
wavy wall in the Y-Z plane, amplitude A=2.54mm· · · 43 Fig.3-27 Distributions of instantaneous spanwise velocity contours for flat boundary.. in the Y-Z planes, amplitude A=0mm · ·
Y., (1997), “Resource recovery of sludge as building and construction materials — a future trend in sludge management,” Journal of Water Science and Technology, Vol. (2000)
Marar (2000), “On the Value of Optimal Myopic Solutions for Dynamic Routing and Scheduling Problems in The Presence of User Noncompliance,” Transportation Science, Vol..
Sharma (1999), “An Intergrated Machine Vision Based System for Solving the Non-Covex Cutting Stock Problem Using Genetic Algorithms,” Journal of Manufacturing Systems, Vol..
