成功大學新進教師學術研究計畫補助.成果報告
計畫題目:三維動態網格資料簡化與關鍵畫格提取 計畫類別:■ 個別型計畫
計畫編號:NSC 96-2221-E-006-312-MY2
執行期間: 96 年 08 月 01 日至 98 年 07 月 31 日
計畫主持人:林昭宏
計畫參與人員: 陳俊元、賴泓瑞、王名玉 執行單位:成功大學 測量及空間資訊學系
中 華 民 國 98 年 5 月 14
II
摘要
三維幾何模型資料在國家所提倡的數位內容計畫中為一項重要的資料型態,在現今的電腦 動畫製作,主流的創造方式為自由的組合經由搜集而來的運動資料,如動作擷取器(Motion Capture)所取得的運動資料,應用這些真實的資料來創造出全新的電腦動畫,更能增加整個 動畫的擬真性,而這些製作好的動畫資料,因為較細緻,所以網格模型資料量大且畫格數 量多。由數個關鍵靜態三維幾何模型所組成的動態模型(animatable model)在目前的學術界 或是產業界(例如:電影或遊戲方面)廣泛使用,為了最佳化執行效率與儲存空間,以期 能將動畫資料應用在互動式環境上,本研究計畫提出經由分析動態網格的運動來進行網格 簡化的方法。此外,我們提出使用基因演算法來進行關鍵畫格提取的方法,經由設計過的 基因編碼與演化動作,讓系統自動從動態網格資料中提取出有意義的關鍵畫格,使動畫資 料能更有效率的儲存、重覆使用與瀏覽。
本計劃為兩年期計劃,我們將發展一3D動畫資料簡化演算法及關鍵畫格擷取,此計畫將會 有以下研發重點:
1. 關鍵畫格提取:自動根據畫格的重要性來提取出一組有意義的關鍵畫格。將關鍵畫格的 提取描述成一個最佳化的數學問題,並且採用基因演算法 (Genetic Algorithm) 來尋找最 佳解。因為提取出來的關鍵畫格能經由許多數值的方法重構出其它的非關鍵畫格,所以 可以有效的提升儲存效率,整段動作只需儲存分析出來的關鍵畫格,其餘非關鍵畫格並 不需要儲存
2. 3D動畫資料之簡化:我們計畫發展一個與視角無關並且與動畫物體姿勢無關之3D動畫 資料簡化,我們將採用目前最常被研究學者所使用的模型簡化方法 – quadric error metric,但此方法僅適用於靜態三維網格物體簡化,因此我們併入了不同姿態之動畫資 訊來強化與擴充此方法以完成3D動畫資料之簡化。
3. 加速動態網格的分割:動態網格的分割是一項十分重要的基礎研究,如何將動態網格分 割成數個Near-rigid 的部份,是主要的目標。我們利用網格物體簡化架構來加速動態網 格分割。
關鍵字:三維幾何模型簡化、多層解析力表示法、關鍵畫格提取、基因演算法、動態網格 分割
III
Abstract
3D geometric mesh model is an important data type in the Digital Content Plane promoted by the government. In the computer animation related researches, the most popular research issue is to create a new animation from the existing animation in the motion capture database. Recently, many researchers prefer representing an animation data as a deforming mesh form, i.e., time-varying mesh, due to skin details handling requirements. High resolution deforming meshes with great amount of frames are required to represent pleasing and realistic animations. If this large volume animation data is used in a real-time environment, we must remove the un-necessary and redundant data or even the perceptually unimportant features or frames that we can omit. In this project, we present novel simplification and keyframe extraction algorithms for reducing an animation data size.
In this two-year project, we plan to develop a 3D animation model simplification algorithm and keyframe extraction based on deformation analysis. There are three key techniques, described in the following, in this project.
1. Keyframe Extraction: In general, an animation sequence consists of a large number of frames (above 100 frames) and the number of extracted keyframes is a non-static variable. It is time-consuming to heuristic search an optimal solution in such large searching space. An efficient search approach is required. Therefore, we introduce a novel approach that adopts the genetic algorithm to efficiently search optimal keyframes. Although the search result mayn’t be an optimal solution, it is good enough, i.e., near-optimal solution, to represent an animation sequence.
2. 3D Motion Data Simplification: We plan to develop a vew- and pose-independent 3D motion data simplification method. The commonly-used quadric error metric is adopted to simply mesh model. But, this approach is only applied on static mesh model. We plan to extend this method incorporated the information of the various model pose to simply 3D motion data.
3. Efficient deformation mesh decomposition: Deforming mesh decomposition plays a critical role in computer graphics. However, it is time consuming due to require all-pairs shortest path finding and iterative face clustering. Based on the proposed simplification scheme, the computation cost of decomposition can be greatly reduced.
Keywords: Mesh Simplification, Level-of-Detail, Keyframe Extraction, Genetic Algorithm, Mesh Decompsoition.
IV
目錄
中文摘要………..II 英文摘要………III 目錄………IV
一、前言………1
二、文獻探討………1
2.1 網格簡化……….………1
2.2 關鍵畫格提取……….………5
三、研究方法……….……….7
3.1 動態網格的簡化演算法……….7
3.1.1 分析網格運動………7
3.1.2 面重要性計算………..9
3.2 關鍵畫格的提取……….…10
3.2.1 基因演算法………11
3.2.2 轉化成最佳化問題………12
3.2.3 基因編碼………13
3.2.4 評估標準………13
3.2.5 初始化基因族群………15
3.2.6 複製、交叉配對與突變………15
V
3.2.7 世代演化………17
3.2.8 參數設定與終止條件………17
四、實驗結果與討論………18
4.1 分析動態網格運動情況的結果………18
4.2 關鍵畫格擷取結果………...………19
4.3 動態網格簡化前後的結果比較………... ………... ………...20
五、研究成果………... ………... ………... ………... ……….24
參考文獻………….. ………….. ………….. ………….. ………….. ………….. ………..25
1
一、前言
現今三維幾何模型已廣泛的應用在我們生活和我們的生活息息相關,不過由三維掃描器所 建構完成的三維幾何模型會有資料量過多的問題,過多資料量的動畫模型對於後段的數位 幾何處理(Digital Geometry Processing)很明顯造成執行效率不彰,近幾年來電腦圖學相關的 研究人員對單一模型簡化的議題(Level-of-Detail)均有相當深入的研究,但對於需求日益增 高的動畫模型簡化的議題在國內外目前少有研究,因此在本計畫中,我們計畫去發展一個 與視角無關並且與動畫物體姿勢無關之 3D 動畫資料簡化演算法與關鍵畫格提取演算法。
本計畫為期兩年,目前第一年預定的 3D 動畫資料簡化演算法已完成,內容與結果詳細描 述如下:
二、 文獻探討
2.1 網格簡化
網格模型簡化法是目前許多國內外研究單位研究主題之一,如微軟美國研究中心的Hoppe 研究團隊提出多層次精細度漸進式網格模型(Progressive Mesh)技術[Ho96]以及觀視點相依 之多層次精細度模型(View-dependent LOD)的方法[Ho97];卡內基美濃大學Garland等研究人 員提出的用quadric error metric來快速評估簡化邊之候選[GH97];以及國內台大歐陽明教授、
陳炳宇教授、交大莊榮宏教授在這方面皆有傑出的研究結果。網格簡化的主要目的是要降 低網格模型的資料量並且能各維持網格模形的外觀。我們可將簡化方法分為三大類:頂點 移除(Vertex Decimation)、頂點叢集(Vertex Clustering)、邊線退化(Edge Collapse)與模型細化 (Mesh Subdivision),下面對於這三大類簡化方法做一簡單介紹,並且對目前較少的動畫資 料簡化也做一介紹。
頂點移除(Vertex Decimation):Schroeder et al. [SZL92] 描述一網格簡化演算法,藉由頂點 移除方式來完成網格簡化,此研究團隊所提出的方法是以頂點附近局部區域的幾何形狀的 特徵程度做為考量依據來反覆地選取一候選頂點,此一候選頂點為下一步欲移除的頂點,
每次頂點移除程序都包含了兩個步驟,第一步驟為頂點移除,此步驟會將頂點與頂點相鄰
2
的三角形移除,移除之後網格模型在那地方就會留下一個破洞;第二步驟為三角化 (Triangulation),利用網格三角化演算法將將頂點移除後所產生的洞補起來。此頂點移除方 法將網格頂點分為三類:簡單頂點(Simple Vertex)、邊界頂點(Boundary Vertex)與複雜頂點 (Complex Vertex),只有簡單頂點與邊界頂點可以成為被移除頂點的候選頂點。藉由評斷頂 點移除前與移除後兩個不同解析力網格模型的誤差來選擇頂點候選人,而Ciampalini et al.
[CCMS96] 與Turk [Tu92]則是比較原始網膜模型與簡化後的網格模型來當成誤差評斷。
邊線退化(Edge Collapse):在網格模型簡化方法中最被廣為使用的策略是反覆的進行邊線 退化,也就是將兩個頂點的邊線退化成為一個頂點。這種簡化方式,每一次最多可以簡化 一個頂點和兩個三角形,這方面代表性的演算法有Hoppe [Ho96]與Garland et al. [GH97],在 他們所提出的方法裡面,可以輕易的建立網格模型多層解析力頂點樹狀結構,藉由記錄每 一次簡化步驟來記錄頂點之間的相依關係,則可建構一由頂點資訊所組織而成的階層架構,
稱為頂點二元樹(Vertex Binary Tree)或是網格模型多層解析力結構。此頂點樹狀結構被許多 人引用來進行適應式網格模型精細改進(adaptive refinement),譬如Hoppe [Ho97; Ho98]、Xia et al. [XV97]與Luebke et al. [LE97],適應式網格模型精細改進也就是只針對物體的局部區
域進行精細化或粗糙化的運算,也可以輕易的建立許多不同解析力的原始網格模型,並且 可以快速在不同解析力的網格模型中依需求轉換,這樣的方式常被使用在即時顯像系統 (Real-Time Visualization)與觀看者相依之多層解析力模型精化(View-dependent refinement)。
觀看者相依之多層解析力模型精化為Hoppe [Ho97]所提出,然後當動態瀏覽場景需要物體 的幾何模型時,即時根據觀視點的位置與觀視方向選取頂點二元樹上的節點,以達成觀視 點相依局部性精細化的過程。當觀視點改變後,直接調整動態串列的狀態。利用顯像畫面 前後的共效性(Frame-to-Frame coherence)以變更最少的頂點,以達到即時互動的需求。觀視 點相依的多層次精細度模型因為即時考慮觀視點的變動而局部更新幾何模型的精細度,因 此相較於觀視點無關的多層次精細度模型(View-independent LOD),就可以得到較好的視覺 效果。
頂點叢集(Vertex Clustering):頂點叢集法的多層解析力網格模型簡化方式可視為一種對幾
3
何模型的頂點重新取樣的方法。如果三維空間中許多接近的頂點在投影到影像平面之後,
這些頂點幾乎圍繞在同一個像素附近,因此這些頂點很直接的被認定為用一個代表頂點來 取代,如此作法,不但可以使得幾何模型的複雜度降低,對於輸出的品質效果也並不會有 太大的影響。頂點叢集法就是利用這種觀念簡化原始模型的。一般做法上,先將原始模型 的方形邊界(Bounding Box)做均勻的空間分割(Uniform Spatial Subdivision),一般是使用八分 樹(Octree)來做均勻切割,使得網格模型所佔據的空間分成好幾個小細格(Cell),然後在每個 小細格中選擇一個最具代表性的頂點來替代同細格內的其他頂點,最後把所有代表小細格 的頂點重新三角化,獲得複雜度較低的幾何模型。上個段落所提的反覆的進行邊線退化策 略也可視為頂點叢集運算的一種,一個邊線退化可看成兩個頂點叢集成為一個頂點叢集,
而網格模型多層解析力樹狀結構也可簡單的藉由反覆進行頂點叢集運算來完成。Carr et al.
[CH04] 提出對網格模型多層解析力樹狀結構重新頂點叢集方法,此研究團隊是利用樹的旋 轉與樹節點轉換來完成。
與三維網格物體簡化相關且相當重要的一項研究為三維物體多重解析力分析,由一個原始 的 3D 物體 M 建立出一個低解析度物體 MJ,這樣的一個解析度物體和原始物體是差不多 的,但是它的複雜度和精細度卻可以隨需要而作調整,也就是由比較少的資料所構成的。
建一個多重解析力的 3D 物體一般都會先建立一個最低解析度物體 M0,也就是最粗糙的一 個物體,再由這個最低解析度物體和原始物體之間來求不同解析度的物體。Eck et al.
[EDDH95]在 Siggraph’95 提出了一個 3D 物體多重解析度分析的方法,此方法主要可以分為 三個部分,第一個部分是將原來的 3D 物體作分割的動作,此做法是在原始的 3D 物體上均 勻的撒點並得到其 Voronoi diagram,然後藉由 Voronoi diagram 將這些點三角化而得到一個 三角網格,此三角網格就當成最低解析力物體。第二個步驟是對之前所產生的每個三角形 區塊進行攤平的程序,也就是將原始物體中每一點對應到最低解析度物體的三角形上某一 點的關係求出來,這部分所用的方法為 Harmonic maps。有了最低解析度物體與其攤平圖的 關係之後,最後一個步驟是對最低解析度物體上的三角形作 recursive 4-to-1 splits,直到三 角形被細分到和原始物體的誤差直降到一個給定的容忍值以下,這樣就得到了一個解析度 介於最低解析度物體和原始物體之間的一個物體。而另一研究 Lee et al. [LDSS98]的做法則
4
是用點移除(vertex removal)的方式,從一個比較高解析度的物體 Ml,選取一些點移除之後 則成為下一層解析度的物體 Ml-1,這樣從原始的物體一層層移除點,最後就得到最低解析 度物體。至於哪些點是要移除的,有兩個判斷的依據,一個要求是每次移除的點必須是獨 立的點集合,也就是任兩點一定不會包含於對方的 1-ring neighborhood 中。而另一個要考 慮的就是每一點的權重,權重越小的代表是越不重要的點,也就是可以優先被移除,而當 一個點被移除,這個點的 1-ring neighborhood 就要作一次三角化的動作,而被移除的那一 點在 Ml-1找周圍的三角形以 Barycentric coordinate 的方式,用三角形的三點來表示。所以當 最後降到 M0時,所有原來物體上被移除的點都可以用 M0的三個點來表示,最後重新網格 化(re-meshing)的部分和上一研究一樣是作 4-to-1 splits 增加點的數目,在取一個閥值讓物體 的誤差降到一定的程度之後停止。Lee et al. [LDSS98]與 Guskov et al. [GVSS00] 是用同樣的 方法求得最低解析度物體 M0,但是不同的地方在於 Lee et al. [LDSS98]是利用 Barycentric coordinate 的方式來代表移除掉的點,而 Guskov et al. [GVSS00]是以法向量的差來紀錄一點。
另一個不同作法是用小波來描述不同解析力下網格的形狀[LDW97],以小波進行遞迴式的 細化在曲面的描述上,將牽涉到一群小波尺度函數(scaling functions)的表示,也就是多解析 度的分析。一個細化曲面的產生是經由一個初始的控制網格(control mesh) M ,連續產生0 一序列的較細緻的網格,M1,M2,...,最後會收斂到一個曲面。每個細化的步驟包含了分裂 (splitting)和平均(average)兩個小步驟,分裂: 當我們要將一個網格由 j 解析力提升到 j+1 解析力時,我們將網格中的三角形每邊取其中點,將此三角形分割成四個小的三角形。平 均:平均的步驟則是將分裂步驟後所得的新網格的點作調整,而這些點新位置的給定,是 經由臨近的點作比重式的平均而得。
在 Garland et al. [GH97]的方法被提出之後,有許多以 Quadric Error Metric 為基礎的簡化方 法被提出來。如加入不同材質屬性的考慮 Garland et al. [GH97]與 Hoppe [Ho99]。而在 Kho et al. [KG03]所提出的方法中,可以讓使用者方便的指定與控制所要加強保留的部份,達到
最佳的簡化效果。在動態網格簡化方面,Mohr et al. [MG03]提出來的方法能簡化動態網格,
並且盡量保持運動狀況,而且簡化後的相連性相同。該方法依然基於 QEM,只是在反覆移 除邊的過程中,每個邊的邊線退化成本為所有畫格該邊的邊線退化成本(Collapse Cost)的總
5
和,這種作法雖然能盡量保持運動狀況,但某些運動特徵僅在少數幾個畫格中出現,造成 這些運動特徵使用該方法無法完整保留。此外,若只是單純的分別針對每個畫格的網格作 靜態網格的簡化,則會造成每個畫格的網格資料相連性不同,播放動畫時會有不連續與跳 動的情況產生。在 Kircher et al. [KG05]所提出的方法中,為了要達到保留更多的幾何特徵,
所以該方法是針對單一畫格來進行最佳的簡化,雖然方法中有考慮相鄰畫格的相似關係,
盡量消除不連續的情況,但最後的結果在視覺上仍可以輕易看出有跳動的情況產生,而非 十分平滑的運動。我們的方法能在動態網格簡化後,每個畫格的網格資料依然保持相同的 連接性,而且外觀上的特徵又能依運動的情況以予保留,同時兼顧外觀與運動情況。
在 Houle et al. [HP01]所提出的方法中,主要針對有骨架的動態網格,他們組合 漸進式網格 結構(Progressive Mesh)的觀念與骨架的資訊來簡化動態網格,製作連續且平滑的 多層次解 析力(Level of Detail, LOD)。此外,DeCoro et al. [DR05]所提出的方法,在進行簡化時也需 要分析骨架的運動資料,整個演算法亦是基於 QEM 的誤差計算法,並且同時參考骨架的 運動進行動態網格的簡化。然而,以上兩篇所提出的方法皆限制在擁有骨架資訊的動態網 格。
2.2 關鍵畫格提取
目前的電腦動畫製作,主流採用的設計方式為美術人員自由的組合經由動作擷取器所取得 的運動資料,應用這些真實的資料來創造出全新的電腦動畫,更能增加整個動畫的擬真性。
由於動作擷取器所取得的運動資料往往是畫格數極大的資料,需要非常大量的儲存空間。
因此,提取這些運動資料的關鍵畫格便能更有效的儲存、重組與瀏覽資料。此外關於影片 的摘要功能,近年來已經成為電腦視覺中非常重要的研究領域,相關的應用十分廣泛,如 快速瀏覽影片、提供簡便的方式尋找影片中使用者有興趣的部份等。而這些影片的摘要功 能,主要便是經由影片的分析進而提取出有意義的關鍵畫格。換句話說,關鍵畫格的提取 是影片摘要中必要的基礎演算法。然而,在三維的電腦動畫中,非常少見相關的演算法被 提出來。
在三維的電腦動畫中,與關鍵畫格提取較有相關的領域為分析動畫的 Principal Components,
6
經由這些 Principal Components 能有效的重構出整段完整的動畫,讓儲存的資料量大大降低。
如 Alexa et al. [AM00]所提出的方法,經由 PCA 的分析找出整體動態網格資料中的 Principal Components,接著儲存分析出來的 Principal Components 與重構權重資料,以後便 能快速的重構出非常相似的整段動作。
重構的方法十分簡單,每個畫格可以經由這些 Principal Components 與不同的權值來組合而 成。提取出來的 Principal Components 的數量越多,重構回來動畫的品質越佳。因此,這些 相關的研究主要應用於動畫資料的壓縮,但由於這些 Principal Components 並非存在於原始 動畫中,而是經由計算而新產生的,所以與關鍵畫格的提取在意義上是不相同的。在動畫 資料壓縮方面的研究,如 Alexa et al. [AM00] 主要是經由 Matrix factorization 的方法,找出 Principal Components,雖然能得到品質良好的結果,但在需要的運算時間與記憶體空間上,
有著較大的需求。特別是在處理資料量較大的動畫時,需要的運算時間與記憶體空間大幅 提升,無法有效率的執行演算法。該方法雖然提供了一個良好的壓縮方法,但仍然沒有辦 法使用該方法來提取出關鍵畫格。此外,如 Karni et al. [KG04]的方法,主要也是以 PCA 為 基礎,為了更高的壓縮率,接著套用 LPC 至 PCA 分析出來的係數上,經由這兩段的處理,
能達到非常高的壓縮率與品質。成大李同益老師[LLYL05]則提出分析運動資訊後,先將網 格進行分割,接著再將每個部位進行 PCA 的分析與壓縮,因為經由分析而分割完成的各個 部位,同一個部位的網格運動情況是接近相同,所以在壓縮率能更進一步。
在關鍵畫格提取方面的相關研究,如 Lim et al. [LT01]所提出來的方法,主要是針對由動作 擷取器取得的人類動作資料,主要的概念是使用軌跡曲線(Trajectory Curve)來表達動作資料。
接著使用曲線簡化(Curve Simplification)的方法來套用至軌跡曲線,簡化後各個相鄰線段的 連接點即為為關鍵畫格所在。在 Liu et al. [LZWP03]所提出的方法中,也是針對動作擷取器 所取得的資料,來進行以群集為基礎(Clustering-based)的關鍵畫格提取。首先該方法定義了 兩個畫格相似度的測量方式,接著分配每個畫格至一個相對應的群集中。在所有的群集形 成後,每組群集內的第一個畫格被選取為關鍵畫格。而在 Park et al. [PS04]所提出的方法,
主要是使用 Quaternion 來表示動畫資料,並且使用 PCA 與 K-means clustering 來提取出關 鍵畫格,該方法能保證每一個非關鍵畫格,能使用提取出來的關鍵畫格進行線性組合後重
7
構出來。此外,Huang et al. [HCHY05]中提出的方法有些地方相似於 Alexa et al. [AM00] 的 方法,但該方法並不是經由運算來產生 Principal Components,經由分析所有畫格來提取出 關鍵畫格,這些關鍵畫格是確實的存在於動態網格動作中。首先,該研究將動態網格資料 中的所有畫格分成兩類,一類是關鍵畫格;另一類是非關鍵畫格。根據這些指定的關鍵畫 格,我們可以計算出要重構非關鍵畫格的權重,由於重構出來的非關鍵畫格與原始的畫格 會有誤差產生,因此這個誤差值便可以用來評估目前關鍵畫格的優劣。
在演算法一開始時,會將所有的畫格歸類為關鍵畫格,在這些關鍵畫格中,使用貪婪演算 法(Greedy Algorithm)來尋找出最適合歸類為非關鍵畫格的,尋找的依據為上述的誤差值。
接著便以此類推慢慢找出非關鍵畫格,直到誤差值超過使用者所指定的容忍值便停止演算 法。由於在演算法中,會不斷的計算重構用的權重,計算時需要進行矩陣的逆矩陣計算,
因此需要的計算時間與記憶體空間較大,所以在速度方面的進步有限。該研究有提到,在 速度上雖然較 Alexa et al. [AM00] 的方法快,但由於提取出來的物件,僅限定於原始動作 中有存在的畫格,因此經由這些關鍵畫格重構出來的動作,與原始動作的誤差會較大。但 是,壓縮並非關鍵畫格的主要應用領域,關鍵畫格能使動畫可以有效的重組與瀏覽,更可 以達到動畫的摘要,此外動畫的搜索與比對更需要關鍵畫格的輔助。
三、 研究方法
3.1 動態網格的簡化演算法
在許多互動式環境的應用方面,如虛擬實境、電玩遊戲等,需要擁有流暢的執行效率。因 此,若能將網格的資料進行最佳的簡化,便能將整個場景的描繪時間大大縮短,達到流暢 的執行效率,讓使用者能感受即時互動的樂趣。簡化後的網格資料,三角形的數量少,會 在外觀上有所失真。若是動態的網格,更有可能因為三角形減少,造成運動的情況與原始 差異很大。所以,在簡化網格的過程中,要優先簡化視覺上較不重要與運動量低的部位,
讓最後的結果能擁有外觀上的近似與保持運動情況。因此,如何分析動態網格資料的運動 情況,便是這個問題最大的挑戰所在。此外,動態的網格擁有多個畫格,若只是單純的分
8
別針對每個畫格的網格作簡化,則會造成畫格不連續的情況。所以,我們希望該動態網格 所有的畫格都保持相同的連接性,才能達成最佳的視覺效果。
3.1.1 分析網格運動
為了分析網格的運動情況,首先要先將每個畫格上的每個三角形相對於參考畫格對應三角 形的變形量計算出來 (參考畫格通常為第一個畫格),接著再根據該三角形與相鄰三角形變 形量的差異,來決定該相鄰三角形的變形差異量。若某區域兩兩相鄰三角形的變形差異量 大,則表示該區域的整體網格變形量大。
圖 1: 三角形變形量示意圖。
三角形變形量計算的方法如同 Sumner et al. [SPB00]的方式。在此簡述一下計算的方法,首 先我們為每個三角形沿著法向量的方向增加第四個點。
2 1
3 1
1 3 1 2 1
4 v v v v
v v v v v
v
(1)
接著,我們便可由三角形的四個點,計算出該畫格 (f) 的每個三角形 (i) 相對於參考畫格 (R) 對應三角形的變形量 (Deformation),此變形量為一個 3x3 大小的矩陣,可以用來表示 旋轉、扭曲與縮放。我們可以由下面的步驟進行推導,得到最後的變形量計算公式。
4 1
,
d v k v
n
Deformatio if kR kf (2)
首先我們將變形量與三角形每個點的關係列出,其中的 d 代表位移向量。接著將公式轉成 矩陣形式,並將 d 消去。
f i R i f
iV V
n
Deformatio (3)
9
R R R R R R
R i
f f f f f f f i
v v v v v v V
v v v v v v V
1 4 1 3 1 2
1 4 1 3 1 2
(4)
最後我們可以得到變形量的公式如下:
1 if iR
f
i V V
n
Deformatio (5)
在某個畫格 (f) 時,兩個相鄰三角形 (i 與 j) 的相對於參考畫格的變形差異量 (Deformation Difference),可由下列公式計算:
2 ,
f j f
i f
j
i Deformation Deformation e
nDifferenc
Deformatio (6)
上述公式主要是考慮這兩個相鄰三角形在各個畫格 (f) 的變形差異量。在計算完每個畫格 這兩個相鄰三角形的變形差異量後,還要選出所有裡面最大的,來作為最後的整體變形差 異量。如下面的公式所示:
ifj
j f
i DeformationDifference e
nDifferenc
Deformatio , max , (7)
若兩個相鄰三角形的整體變形差異量大時,表示在該區域的整體網格變形量較大;反之,
整體變形差異量小時,表示該區域的整體網格變形量較小。因此,我們便可以由計算變形 差異量,來分析網格運動的情況,並且根據分析結果來決定每個三角形的重要程度。
3.1.2 面重要性計算
在分析完成運動後,便可以根據分析後結果來為網格上的每個三角形決定重要性。在網格 中的三角形 (我們又可以稱為面),根據與相鄰面的整體變形差異的平均來作為該面的重要 性 (Weight),計算的公式如下:
pk
p k
p DeformationDifference
Weight ,
Adjacency
Average
(8)
運動量小的面會擁有較小的重要性,重要性較小的面,在簡化的過程中,會優先作簡化的 動作;反之重要性較高的面,會優先保留。經由推導,我們可以將面的重要性加入 Garland et al. [GH97]的 Quadric Error Metrics,並且保持原有的特性。在該研究中,使用矩陣 (Qp) 來 表示每一個面,並為每一個網格上的點,計算出 Error Matrix,用來快速評估誤差程度,Error Matrix 的計算方法為該點所有相鄰面矩陣的總和。在 Garland et al. [GH97]中,原始的
10
Quadric Error Metrics 的公式如下:
v Q v
v pp v
v p p v
v p v
v p
p v p
T T
v p
T T
v p
T
Adjacency T
Adjacency Adjacency Adjacency
2
(9)
將 Quadric Error Metrics 加入面的重要性後的推導公式如下:
Q v
Weight v
Weight v
pp v
Weight v
p p v v
v p
p p v
p
p T
T v p
p T
T
Adjacency T
Adjacency Adjacency
(10)
經由上述的推導,可以得出每個點的 Error Matrix (Qv) 的初始化公式:
v p
p p
v Weight Q
Q
Adjacency
(11)
在前處理的階段,我們需經由上述公式來將計算每個點的 Error Matrix。與 Garland et al.
[GH97]所提出的方法,不同之處在於我們的每個面有著不同的重要性,並且經由上述的推 導,面的重要性為一常數,因此誤差計算的公式 (Δ) 依然是 Quadratic 函數,所以便可以 保留與原研究相同的所有特性,如可以使用一次微分計算出極值,找出移除邊後新產生點 的位置。
3.2 關鍵畫格的提取
在一個動態網格的資料中,通常擁有許多的畫格,播放這些畫格便可以使網格運動起來。
如同影片一樣,影片是由一堆畫格組成,經由連續播放畫格便可以達到動畫的效果。在影 片的方面的研究有影片的瀏覽、壓縮與搜尋等,在動態網格中也是一樣的。因此,如何找 出關鍵畫格便成了一項重要的基礎研究,有了良好的關鍵畫格,才能達成如上述的應用。
在動態網格的所有畫格中,找出最可以代表整段動作或最具有意義的關鍵畫格,而使用這 些關鍵畫格來重構整段動作時,往往能得到極小的誤差值,並且這些關鍵畫格的數量相對
11
於所有畫格的數量是相對少數的。因此,如何找出符合需求的關鍵畫格,正是我們目前所 要解決的問題。
3.2.1 基因演算法
基因演算法(Genetic Algorithm)是最佳化工程計算常用的一種演算工具,基因演算法源自於 自然界中 "物競天擇,適者生存" 的特性,模擬生物間的競爭,倖存者得以繁衍下一代的 觀念,應用於最佳化工程之計算時,以隨機方式同時產生多組解,較佳的解將被留下運算,
如此多次疊代即可求出最佳解。
圖 2: 基因演算法流程圖
傳統之演算法往往由幾個起始點,依照一定的數學模式產生下一次疊代值,如此反覆計算 求得最佳解;而基因演算法以隨機方式產生許多的點,同時搜尋最佳解,因為在每一次疊 代過程皆是取相對最佳的點,因此只能找到最接近之最佳解。不過因為其他演算可能也只 找到局部最佳解而不能保證是真正的最佳解。所以基因演算法是相當不錯的最佳化運算工 具。
12
圖 3: 基因演算法流程 Pseudo Code
基因演算法是模仿生物進化遺傳的過程,因此基因演算法三個主要的運算子:複製 (Reproduction)、交配(Crossover)、突變(Mutation),應用此基本觀念即可完成演算法之 運算。在下面的章節中,會個別介紹每個步驟詳細的實作方法,包括編碼、交配、突變與 評估。
3.2.2 轉化成最佳化問題
在本研究中,我們將關鍵畫格的提取描述成一個數學上的最佳化問題,並且使用基因演算 法來尋找最佳解。希望能從動態網格所有畫格中,挑出有意義的關鍵畫格。下面的公式為 整個最佳化問題的目標函數:
T
T
TmberRatio KeyframeNu
1 Error
Fitness 1
(12)
上述的公式中,考慮了兩個重要的項目,其中一項為使用關鍵畫格來重構其他非關鍵畫格 後的誤差 (Error)。因為根據觀察,若關鍵畫格能重構出來的誤差值較小的整段動作,則表 示這些關鍵畫格能有意義的表達整段動作。除了誤差值之外,另一個項目為提取出來關鍵 畫格的數量比例,我們希望提取出來的關鍵畫格數量越少越好。因此,若能在誤差與數量 之間取得一個平均,求得目標函數的解,便可以找出一群最具代表性的關鍵畫格。在上面 的目標函數,代表的意義是適應力,因此在最佳化的過程中,要找出的是擁有最大適應力 的解。
13
3.2.3 基因編碼
基因族群由一群基因所組成,每個世代的族群大小是相同的。每個基因代表著本問題的一 組解答,根據此解答的好壞,計算出該基因的適應力,解答較佳的基因適應力較佳。接著 經由 "物競天擇,適者生存" 的規則,逐漸淘汰適應力較低者,也就是解答較差的基因;
另一方面,根據交叉配對與突變的規則,慢慢演化出適應力較佳者,也就是解答較佳的基 因。在不斷地進行疊代後,整體基因的適應力會逐步提升,最後逼近最佳的解答,甚至達 到最佳的解答。
圖 4: 基因編碼示意圖
我們將一組解答使用二元字串來表示,字元的個數為原始總畫格數,每個字元便代表著一 個畫格,由左至右依序代表著第一個畫格至最後一個畫格。若該畫格為關鍵畫格,代表的 字元為 1;若該畫為非關鍵畫格,則代表的字元為 0。
圖 5: 基因族群示意圖
每個基因的表示方式就如同上述的二元字串,使用二元字串來編碼基因,是最簡單也最常 見的編碼方式。
3.2.4 評估標準
在基因族群中的每組基因都代表著一組解,該解的好壞,我們使用上述的適應力 (Fitness)
14
函數來評估它。基因擁有較佳的適應力代表著該組解是較佳的。適應力函數由兩項評估組 成,第一項為誤差值。在一組解中,提取了某些畫格作為關鍵畫格,接著使用這些關鍵畫 格來重構出其他的畫格。將這些重構好的畫格與原始的畫格計算誤差,便可以得到重構後 的整體誤差值。在最佳化的過程中,非關鍵畫格重構的方法我們採用該畫格相鄰的兩個關 鍵畫格來作線性內插,線性內插的速度較快,我們也曾實驗過其他方法,雖有品質上的些 許提升,但品質的提升與速度的下降不成比例。因此,最後採用線性內插來作為最佳化過 程中的重構方法。
Faces , 1 ,
, FrameError
P P P P P
B
A Frame Deformation A B Distance A B
Frame (13)
在重構好所有的非關鍵畫格後,我們使用上述的公式來計算內插好的畫格與原始畫格相對 應三角形的差異量。為了兼顧速度與品質,我們提出了一個新的方法來測量兩個畫格中網 格的差異情況。差異量由所有三角形的變形量與移動量所組成,可以偵測出變形與移動的 情況。根據前面章節的方法,可以計算兩對應三角形的變形量,再加上位置的移動量,成 為它們的差異量。移動量的計算為該三角形所有頂點位移量的平均值。
接著,將每個非關鍵畫格重構後的誤差平均起來便是所有非關鍵畫格的平均誤差值 (NonKeyframeError)。若要計算出目標函數上的誤差值 (Error),還需要經過下面正規化的 處理。其中我們假設僅留下第一個與最後一個畫格當成關鍵畫格時,會產生最大的誤差,
將此時每個非關鍵畫格的誤差平均起來便成為了最大平均誤差。
or MaximumErr
eError NonKeyfram
Error (14)
經由上述的動作,可以完成評估基因的第一項,誤差值的考量。接著,評估的第二項為關 鍵畫格的數量比,表示關鍵畫格數量與所有畫格數量的相對關係,我們使用下面簡單的公 式來計算:
Number TotalFrame
mber KeyframeNu mberRatio
KeyframeNu (15)
由上面的兩項評估方式,我們便可以經由結合,計算出某基因的適應力,也就是某組目標 函數的解。
15
3.2.5 初始化基因族群
初始化基因族群在整個基因演算法中並非最重要的部份,但如果有著良好的初始化,能大 大的加速逼近最佳解的速度,甚至更進一步的逼近最佳解。但是,若使用一般的逼近法來 解出一些區域最佳解,然後使用這些解來當成初始的基因族群,卻會造成初始化的耗費時 間過高,反而沒辦法以最高速逼近最佳解。正如上所述,因此我們提出一個適合本問題的 特殊初始化方法,可以兼顧品質與速度。整個問題的目標在於關鍵畫格的提取,因此我們 假設,若每間隔一個畫格便提取一個關鍵畫格,能得到一組比經由亂數產生的解還好許多。
因為動畫是連續的,所以相鄰的兩個畫格僅會有些許的差異,若同時被取出來當成關鍵畫 格,通常不是最佳的解。
圖 6: 特殊初始化基因示意圖
在整個初始的基因族群中,百分之八十的基因採用最普遍使用的亂數方法產生,而剩下的 百分之二十,使用上述的基因來填補。經由實驗發現,這種初始化的方式能有效增加逼近 速度,因為能降低相鄰畫格皆被選為關鍵畫格的機率。初始化基因族群的示意圖如下:
圖 7: 初始化基因族群示意圖
3.2.6 複製、交叉配對與突變
在初始化基因族群完成後,基因演算法採用三種運算子來進化至下一個世代。這三種運算 子分別是複製、交叉配對與突變。這種的演化方式與自然界的進化很像,如複製就像是無 性生殖一樣,將上一代的基因完成複製下來;交叉配對便是我們人類交配後所產下的下一
16
代,子代會混合母代的基因;最後的突變也就如同我們自然界的畸形子代一樣,基因會因 為受到環境的影響造成某些地方產生變異的情況。
圖 8:基因複製示意圖
而這三種方式除了複製是直接完整複製基因外,其於兩種運算子的實現方法依問題本身的 定義與基因的編碼方式而會有所不同。本研究所採用的交叉配對為單段交換方式,也就是 一對母代的基因在使用亂數選擇好某一個區段後,便將該區段的基因交叉配對完成新子代 的產生。
圖 9: 基因交叉配對示意圖
在突變的方法上,我們提出了兩種突變法,根據我們的實驗結果,交互使用這兩種突變方 法能達到最佳的結果。第一種突變的方法為單點突變,首先採用亂數選出突變的位置,接 著將該處的字元作反向的變化,也就是 0 變成 1 與 1 變成 0。這種突變方式有著將關鍵畫 格增加或刪除的性質,能調整該組解中關鍵畫格的數量。
圖 10: 第一種基因突變示意圖
而第二種突變的方式,首先亂數的選擇某一個是 1 的字元,接著將該字元往左或往右移動,
17
主要目的在於微調該關鍵畫格的選擇,因為也許他的左邊或右邊會有更適合的畫格。移動 方向的決定採用亂數法,但為了能更快逼近最佳解,我們設定有 3%的機率會經由計算來決 定移動方向,強迫直接選擇最佳的方向。這種突變方法有著調整關鍵畫格位置的性質,能 夠增加最佳解出現的機率,又不會過度介入整個演化的過程。
圖 11: 第二種基因突變示意圖
在定義完成這三種運算子之後,我們便可以使用這些運算子來產生下一世代的基因族群,
持續的進行演化,最後逼近最佳解。
3.2.7 世代演化
演化時要繁殖的母代配對會根據適應力的大小來選出,適應力大的基因越容易被選出來繁 殖,此種選擇的方式被稱為「天擇原理」。接著使用上述的三種運算子來不斷的繁殖與演化,
讓整個演化符合 "物競天擇,適者生存" 的規則。在每個世代演化完成後,我們會根據適 應力挑出最好的基因,也就是該次疊代最佳的解。為了使整個基因演算法進行更流暢,每 世代所挑出的適應力最強基因,會直接複製至下一個世代,這樣便能保證下一個世代適應 力最強的基因不會差於上一個世代,讓整個演化能一直逼近最佳解而不會偏離。在演化開 始前,要先設定交叉配對率(Crossover Rate)與突變率(Mutation Rate),通常突變率是很低的。
如此一代一代的演化下去,將產生適應力值很高的基因,此基因便是我們需要的解。
3.2.8 參數設定與終止條件
在基因演算法進行最佳化問題求解的過程中,需要設定下面的幾個參數。
族群大小 (Population Size)
18
族群大小將影響整個系統的表現和最佳化的效能。族群大小較小的系統,由於無法提供足 夠關於問題空間的資訊,因而演進結果通常都不佳;反之,族群大小較大者則表現會較好,
且可以防止結果過早收斂至區域最佳解。但族群大小若過大,則將導致收斂速度降慢到不 可接受的地步。
交配率 (Crossover Rate)
交配率即交配運算元被使用的頻率。交配率若愈大,新的結構將愈快出現於群體中;但交 配率若太高時,則會使得群體中表現優異者在選取步驟發揮前就被改變了;過低的交配率 則會令系統的腳步裹足不前。一般而言交配率設在小於且接近於 1。
突變率 (Mutation Rate)
突變運算元是為了避免遺失任何重要資訊而特地用來增加群體的變動性。它可增加族群的 變化;但太高的突變率將使整個搜尋過程完全隨機化。因此,一般均將突變率設成很小的 值。為確保實驗的一致性,本研究的實驗結果與數據皆採用固定的參數。族群大小設定為 1000,交配率為 0.95 (95%),突變率為 0.05 (5%)。
在演化終止條件的設定方面,通常是根據題目的需求來設定,例如可設定最佳基因達成預 定的評估值時停止,但是此法不能預估訓練時間,故最常見的做法是設定最大演化代數,
以確保基因演算法在合理的時間內產生一組最佳解。而另一種方法是透過統計資訊,觀察 族群演化的收斂狀況,若族群演化趨於穩定,也就是最佳解的評估值變化在一段連續時間 內沒有變化,則可停止演化。本研究計畫所採用的方法為後者,我們設定若族群內有 50% 的 基因相同,且經過連續 100 代的演化而最佳解皆不變時,停止繼續演化。
四、實驗結果與討論
4.1 分析動態網格運動情況的結果
下面為系統進行自動的網格運動分析後的結果圖,根據運動量來決定重要性,由綠至藍的 顏色代表三角形的重要性由最重要至最不重要。重要性較高的三角形在網格簡化中會優先 保留;反之,重要性較低的三角形會優先簡化。良好的分析結果能帶來最佳的網格簡化結 果。
19
圖 12:各組測試資料運動分析結果圖。
經由這些運動分析的結果,才能正確的對動態網格進行簡化,兼顧運動資訊與外觀上的保 留。由上面各組測試資料的分析結果,可以發現重要性較高的部份多在關節與運動量大的 部份,表示我們的演算法能正確分析動態網格的運動情況。
4.2 關鍵畫格擷取結果
如上述章節中所提,所有的實驗結果皆採用固定的參數。族群大小設定為 1000,交配率為 0.95 (95%),突變率為 0.05 (5%)。終止條件為族群內 50% 的基因相同,且經由 100 代演化 而最佳解沒有改變時。圖 13-15 為本方法執行結果,而表 1 與圖 16 詳列相關執行時間與比 較資訊。
圖 13. 關鍵畫格擷取結果(Chicken animation)
20
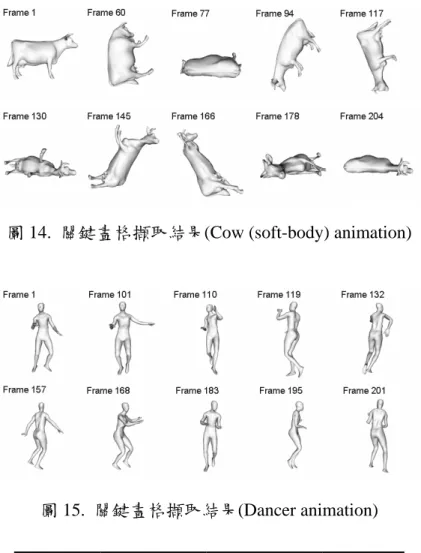
圖 14. 關鍵畫格擷取結果(Cow (soft-body) animation)
圖 15. 關鍵畫格擷取結果(Dancer animation)
Animation Face Number Frame Number Time
Chicken 5662 400 25:37 (m) Cow 5804 204 18:57 (m) Dancer 14118 200 21:23 (m)
表格1. 關鍵畫格擷取演算法執行時間.
圖16. 關鍵畫格擷取成果比較圖(brute-force search (BFS), i.e., optimal solution, 與本研究方 法.
4.3 動態網格簡化前後的結果比較
21
為了比較簡化前後的網格分布狀況,因此我們為網格中的每個三角形塗上不同的顏色,方 便大家區別。簡化後的動態網格不僅能保持外觀上的近似,更可以保留整體的運動狀態。
圖 17: Chicken 簡化前後結果比較圖 (由左至右分別為 Chicken 的第 1、97、250、276 個 畫格)。
圖 18: Horse-Gallop 簡化前後結果比較圖 (圖中的網格為 Horse-Gallop 的第 1 個畫格)。
簡化後的 Horse-Gallop 能保持原來奔跑的動作,甚至尾巴的擺動也能完整保留。
22
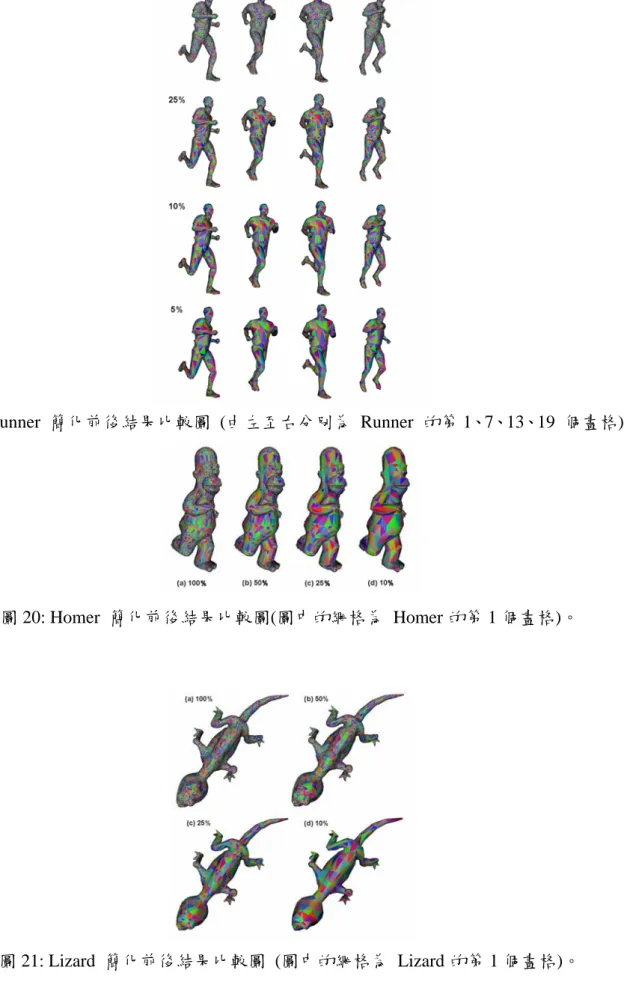
圖 19: Runner 簡化前後結果比較圖 (由左至右分別為 Runner 的第 1、7、13、19 個畫格)。
圖 20: Homer 簡化前後結果比較圖(圖中的網格為 Homer 的第 1 個畫格)。
圖 21: Lizard 簡化前後結果比較圖 (圖中的網格為 Lizard 的第 1 個畫格)。
23
圖 22: Horse-Collapse 簡化前後結果比較圖 (由左至右分別為 Horse-Collapse 的第 1、26、
53 個畫格)。
與 QEM [GH97] 簡化方法比較結果
下圖左邊的結果為採用 QEM 的方法來進行簡化,在簡化第一個畫格後,將簡化的順序套 到其他畫格,由於並沒有考慮整體的運動情況,所以會造成其他的畫格簡化後,運動的情 況被完全破壞。而我們的方法簡化出來的結果,能正確保留外觀與運動的情況,如在下圖 右邊的結果所示。
圖 23:簡化結果比較圖。
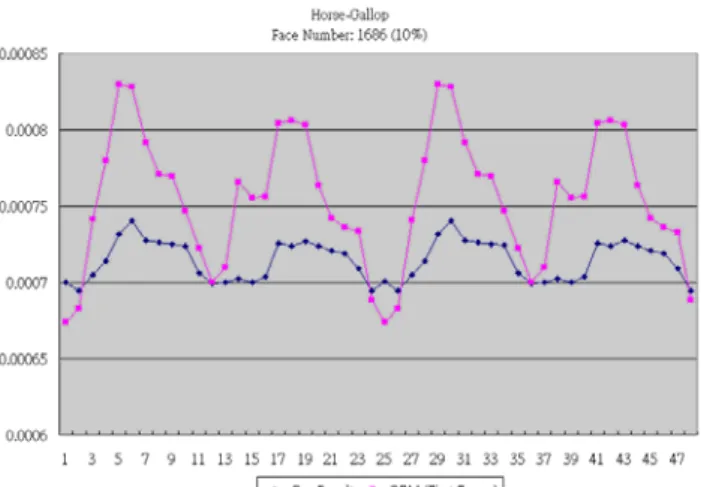
為了提供更客觀的比較,我們採用 P. Cignoni et al. [CRR98] 所提出的測量方式來計算簡化 後的誤差值,所有的誤差值皆採用 Metro 計算而來。這項誤差值的計算,也有應用在 H.
Briceno et al. [BSM*03] 與 Guskov and Khodakovsky et al. [GK04] 中。下圖為我們的方法與
24
QEM 的誤差比較圖。
圖 24: 簡後誤差比較圖 五、研究成果
本研究之部份成果已分別發表於:
T.-Y. Lee, C.-H. Lin, K.-K. Chu, Y.-S.n Wang, S.-W. Yen and C.-R. Tsai,"Mesh Pose-Editing Using Example ", accepted to Journal of Computer Animation and Virtual Worlds (also in International Conference on Computer Animation and Social Agents (CASA 2007).
T.-Y. Lee, C.-H. Lin, Y.-S. Wang and T.-G. Chen, “Animation Key-frame Extraction and Simplification Using Deformation Analysis”, accepted to IEEE Transactions on Circuits and Systems for Video Technology 2008 (SCI, EI).
受本研究計畫經費補助之研究:
J.-Y. Chen and C.-H. Lin : Neighborhood Selection for Differential Coordinates of 3D Point Clouds. accepted to International Journal of Innovative Computing, Information and Control.
M.-W. Chao, C.-H. Lin, C.-W. Yu and T.-Y. Lee: A High Capacity 3D Steganography Algorithm. IEEE Transactions on Visualization and Computer Graphics, Vol. 15, pp. 274-284, 2009.
.-K. Chu and C.-H. Lin: Example-based Deformation Transfer for 3D Polygon Models.
accepted to Journal of Information Science and Engineering.
25
Y.S. Wang, C.-H. Lin and T.-Y. Lee: Interactive Model Decomposition Using Protrusive Graph. International Journal of Innovative Computing, Information and Control, Vol. 4, No. 8, Aug. 2008.
T.-Y. Lee, C.-H. Lin, K.-K. Chu, Y.-S.n Wang, S.-W. Yen and C.-R. Tsai,"Mesh Pose-Editing Using Example ", accepted to Journal of Computer Animation and Virtual Worlds, 2007.
T.-Y. Lee, C.-H. Lin, Y.-S. Wang and T.-G. Chen, “Animation Key-frame Extraction and Simplification Using Deformation Analysis”, accepted to IEEE Transactions on Circuits and Systems for Video Technology 2008 (SCI, EI).
陳俊元、林昭宏: 智慧型基因演算法及差分坐標. 第27屆測量及空間資訊研討會, 2008。
賴泓瑞、陳俊元、林昭宏: 以代數形式建立基本模型樣版對於光達點雲建物建模. 第27 屆測量及空間資訊研討會。
參考文獻
[AM00] Alexa, M. and Muller, W.: Representing animations by principal components.
Computer Graphics Forum, 19(3):411--418, August 2000.
[CCMS96] Ciampalini, A., Cignoni, P., Montani, C. and Scopigno, R.: Multiresolution Decimation based on Global Error. Tech. Report C96-021, CNUCE-C.N.R., Pisa, Italy, Jul.1996.
[CRS98] Cignoni, P., Rocchinim, C. and Scopigno, R.: Metro: measuring error on simplified surfaces. In Proc. Eurographics, volume 17(2), pp. 167--174, June 1998.
[CH04] Carr, N. A. and Hart, J. C.: Two algorithms for fast reclustering of dynamic meshed surfaces. In Eurographics Symposium on Geometry Processing, The Eurographics Association, pp. 229–239, 2004.
[DR05] Decoro, C. and Rusinkiewicz, S.: Pose-independent simplification of articulated meshes. Proceedings of the 2005 symposium on Interactive 3D graphics and games, Washington, District of Columbia, pp. 17-24, April 2005.
[DZSS02] Dimitrova, N., Zhang, H.-J., Shahraray B., Sezan I., Huang, T. and Zakhor, A.:
Applications of video-content analysis and retrieval, IEEE Multimedia, Vol.9, Issue 3, July-Sept. pp. 42 – 55, 2002.
[EDDH95] Eck, M., DeRose, T., Duchamp, T., Hoppe, H., Lounsbery, M. and Stuetzle, W.:
26
Multiresolution analysis of arbitrary meshes. Proceeding of ACM SIGGRAPH’95, pp.173-182, 1995.
[HCHY05] Huang, K.S., Chang, C.F., Hsu, Y.Y. and Yang, S.N.: Key Probe: A Technique for Animation Keyframe Extraction. The Visual Computer, Vol. 21, No. 8-10, pp.
532-541, 2005.
[HP01] Houle, J., Poulin, P.: Simplification and real-time smooth transitions of articulated meshes.In Graphics Interface 2001 Conference Proceedings, pp. 55-60, 2001.
[Ho96] Hoppe, H.: Progressive meshes. In Proceedings of SIGGRAPH 96, pp. 99-108, 1996.
[Ho97] Hoppe, H.: View-Dependent Refinement of Progressive Meshes. In Proceedings of SIGGRAPH 1997, pp. 189-198, 1997.
[Ho98] Hoppe, H.: Smooth view-dependent level-of-detail control and its application to terrain rendering.” Proceeding of IEEE Visualization`98, pp. 35-42, Oct. 1998.
[Ho99] Hoppe, H.: New quadric metric for simplifying meshes with appearance attributes.
In Proc. IEEE Conf. Visualization 99, pp. 59-66, 1999.
[HCC06] Huang, F.-C., Chen, B.-Y. and Chuang, Y.-Y.: Progressive Deforming Meshes based on Deformation Oriented Decimation and Dynamic Connectivity Updating.
Proceedings of ACM SIGGRAPH/Eurographics Symposium on Computer Animation 2006 (SCA06), pp. 53 - 62, Vienna, Austria, 2006.
[HZ99] Hanjalic, A. and Zhang, H. J.: An integrated scheme for automated video abstraction based on unsupervised cluster-validity analysis. IEEE Transactions on Circuits and Systems for Video Technology, 9(8), pp. 1280-1289, December 1999.
[Ga99] Garland, M.: Multiresolution modeling: Survey & future opportunities. In Eurographics ’99 – State of the Art Reports, pp. 111–131, 1999.
[GB00] Girgensohn, A. and Boreczky, J.: Time-constrained keyframe selection technique.
Multimedia Tools Appl. 11(3), pp. 347–358, 2000.
[GH97] Garland, M. and Heckbert, P. S.: Surface simplification using quadric error metrics.
In Proc. SIGGRAPH 97, pp. 209-216, 1997.
[GH98] Garland, M. and Heckbert, P. S.: Simplifying Surfaces with Color and Texture using Quadric Error Metrics. In IEEE Visualization 1998, pp. 263-270, 1998.
[GL03] Gong, Y. and Liu, X.: Video summarization and Retrieval using Singular Value Decomposition. ACM Multimedia Systems Journal, 9(2), pp 157-168, August 2003.
[GVSS00] Guskov, I., Vidimce, K., Sweldens, W. and Schroder, P.: Normal Meshes. In Processing of SIGGRAPH 2000.