Volume19, No3, January 2015, pp. 189-205
1國立政治大學地政系 助理教授 收到日期:民國 103 年 03 月 09 日
2國立政治大學地政系 碩士生 修改日期:民國 103 年 04 月 18 日
3國立成功大學測量及空間資訊學系 碩士 接受日期:民國 103 年 07 月 18 日
*通訊作者, 電話: 02-29393091 ext.51651, E-mail: [email protected]
乾延遲改正後之雷達差分干涉成果評估
林士淵
1*洪連吉
2摘 要
合成孔徑雷達資料具備不受氣候影響、日夜皆可蒐集資料等特點,所獲取之雷達影像若配合雷達差 分干涉技術,即可獲得公分等級之地表變形,因此雷達遙測技術已廣泛應用於偵測各類地表形變。然而,
因雷達訊號穿透大氣層而有大氣延遲效應,進而降低偵測地表變形之精度,故需在干涉處理過程中改正 大氣延遲影響量,從而獲得正確之地表變形。本研究使用取像於 2007 年至 2011 年間之六張 ALOS PALSAR 單偏極衛星影像,探討在進行二軌跡差分干涉處理中,大氣延遲中的靜力平衡誤差(乾誤差)對干涉成 果的影響。研究成果顯示,乾延遲改正後之有效改正點比例在 0.36 至 0.59 之間,而有效改正點之平均改 正幅度在 48.3%至 63.0%之間,可知乾改正之執行對於提高地表形變之精確度確有效果。
關鍵詞:合成孔徑雷達差分干涉、大氣效應、乾改正
1. 前言
在各項遙測資料中,裝載於衛星上之合成孔徑 雷達(Synthetic Aperture Radar, SAR)感測器,因 具有可穿透雲霧、日夜皆可施測及較短之時間解析 度等特點,能在不受天候影響下,接收大範圍之雷 達影像,除藉由影像中之振幅與相位資料以萃取地 表 粗 糙 度 、 地 表 物 徵 與 物 徵 性 質 等 資 訊 外
(Campbell, 2002),若配合雷達差分干涉處理技術,
更可應用於大規模地表變形監測,例如:斷層、火 山、地層下陷及地震等地表形變之偵測(Gabriel &
Goldstein, 1988;Massonnet and Feigl, 1998;謝嘉 聲,2006)
雖然雷達差分干涉(Differential Interferometric SAR, D-InSAR)可用於偵測地表之形變,但是由 於衛載雷達系統訊號在大氣層中傳遞時,其雷達波 會受到大氣干擾而產生延遲現象,使相位差值與真 實狀況存有誤差,導致解算成果不精確。因此,為 提升地表形變偵測之精度,實有必要針對此大氣延 遲現象進行改正(Li, 2005)。而由過去研究發現,
發生在電離層(Ionosphere)與對流層(Troposphere)
的大氣效應對合成孔徑雷達差分干涉影響較 大
(Zebker, 1994),若再細分,以對流層來說,總延 遲量又可區分為濕延遲(Wet delay)與乾延遲(Dry delay),其中濕延遲主要與水汽相關,乾延遲主要 與 壓 力 或 是 溫 度 相 關 ( Tarayre and Massonnet, 1996),由於各類延遲的產生來源不一,對雷達差 分干涉處理中所導入的誤差量規模也不一致,因此 若要消除各項大氣延遲影響,必須分別計算其誤差 量後方能移除。
本文將以探究大氣延遲中的乾延遲為主,利用 涵蓋台灣北部的七張 PALSAR 影像所構成的六組 像對為實驗資料,分別進行雷達差分干涉以及乾延 遲改正,分析乾延遲對於雷達差分干涉的影響。據 此,以下將先介紹雷達影像與合成孔徑雷達差分干 涉原理,接著說明各項大氣延遲種類與本文著重的 乾延遲改正之方法,最後除呈現乾改正成果之外,
亦評估乾改正之效果與限制,最後提出結論。
2. 合成孔徑雷達及干涉
2.1 InSAR 與 D-InSAR
合成孔徑雷達是雷達的一種應用系統,為主動 式遙感探測工具,可由儀器自行發射雷達波並接收 雷達回波。依據雷達影像接收的時間以及天線間不 同的幾何位置關係,可分為三種資料獲取方式,分 別是橫軌式(Across-track)、沿軌式(Along-track)
以及重複軌道式(Repeat-track / Multi-pass)(Gens and Genderen, 1996)。其中,重複軌道模式載台只 需配置一個雷達天線,利用載台於不同時間通過相 同區域兩次的方式,得到接近相同的天線位置,由 於只需單載台單天線,因此所有的雷達系統都能以 此模式獲取所需雷達資料,是為較普遍的取像模式,
然而其缺點為因不同時間取像,大氣條件並不相同,
因此會引入大氣誤差。
InSAR 技術之主要成果為生成干涉條紋,並 以干涉條紋解算地表資訊,其原理為使用兩張或多 張 SAR 影像,提取振幅資訊將影像對位後,使用 雷達之相位資訊產生干涉條紋,進而得到三維地形 資訊。而在產製干涉條紋之過程中,若能在影像選 擇階段考慮觀測區之地表特性選擇適當波長的雷 達影像;並依據影像之垂直基線長與時間間隔組成 像對;在影像處理階段,仔細檢驗全相位回復
(Unwrapping)之執行,將可提高生成良好干涉條 紋之機會(Massonnet and Feigl, 1998;謝嘉聲,2006;
Ferretti et al., 2007)。
D-InSAR 技術利用兩幅包含地理資訊之干涉 圖 , 以 一 幅 包 含 地 表 資 訊 之 像 對 作 為 地 形 對
(Topographic pair),另一幅包含地表資訊及地表 變形資訊之像對作為變形對(Deformation pair),
將兩幅干涉圖依據差分概念求得地表變形。依據組 成 干 涉 圖 的 方 式 , 可 分 為 二 軌 跡 法 ( Two-pass differential interferogram)、三軌跡(Three-pass)法 與四軌跡(Four-pass)法三種。其中,二軌跡法以 兩張橫跨地表位移時間的雷達影像作為變形對,產 製一張干涉圖,包含地形資訊以及地表形變資訊,
再利用地表位移前既有的數值地形模型模擬成地
形對干涉圖,差分推求地表形變。三軌跡法利用一 主影像(Master image)與兩張副影像(Slave image),
以地表發生形變前的主影像與一副影像形成地形 對干涉圖,反應地形資訊,再以主影像搭配地表形 變後的另一張副影像組成變形對干涉圖,反映地表 形變資訊與地形資訊,依據差分概念,進而得到地 表形變資訊。四軌跡法使用四張雷達影像影像,由 第一張主影像與第一張副影像組成地形對,生成第 一張干涉圖,該像對拍攝期間地表沒有形變產生,
再以橫跨地表變動時期的第二張主影像與第二張 副影像形成變形對,生成第二張干涉圖,以差分處 理得到地表形變所產生的相位差值,推求地表變 形。
2.2 D-InSAR 之應用
D-InSAR 技術已普遍用於偵測地表形變,1989 年 Gabriel 等學者以三幅 Seasat 雷達影像利用差分 干涉技術求得地表變形量,證實合成孔徑雷達差分 干涉法可偵測至公分等級之地表變形;1993 年 Massonnet 等學者以兩幅 ERS-1 衛星所獲得之雷達 影像產製干涉 條紋圖, 偵 測 1992 年美國加州 Lander 地區 7.3 級地震,成果確實偵測地震造成之 地表變形;1994 年 Zebker 等學者以三幅 ERS-1 衛 星雷達影像產製干涉條紋圖,並配合合成孔徑雷達 差分干涉法,偵測出 Lander 地震變形量,成果與 GPS 資料比較,證實得到公分級的精度。1997 年 Massonnet 等學者將四幅 ERS-1 衛星雷達影像,偵 測之加州 East Mesa 地熱區地層下陷成果,與水準 測量成果比較,證實兩個方法間的一致性。2011 年 Bayuaji 等學者利用 2006 年至 2008 年的 ALOS PALSAR 影像形成七組像對,有效的偵測出印度的 一座泥火山變化情勢,成果同樣與 GPS 變化量相 符,證實 D-InSAR 技術的可靠性。
2.3 D-InSAR 包含之誤差
D-InSAR 技術雖已臻於成熟,且被運用於各種 不同類型之地表變動監測,然此技術容易因許多因 素導致干涉效果降低,包括地表物特徵、大氣效應、
基線長誤差、地形誤差與時間性誤差等(Hooper, 2006)。其中,因為地表物特徵或是時間性誤差所 引起的同調性降低現象,可藉由選擇不同波長的雷 達影像或是其他處理技術(如:永久散射體雷達干 涉)來改善;基線長誤差則可在影像選取階段,透 過選擇較短基線之像對來降低其影響;多元來源與 多時段之數值地形模型亦應可去除地形誤差效應。
但是對於大氣延遲所引起的誤差,必須在處理階段 將其萃取並去除,方能提高 D-InSAR 的精度。特 別是由前段敘述可知,無論是採用何種方式組成兩 幅干涉圖,由於皆是在不同時間取像,所以其大氣 條件並不相同,因此在進行 D-InSAR 處理時,必 須考 慮 大 氣延 遲 之影 響 ( Klees and Massonnet, 1999)。
3. 大氣效應
SAR 影像紀錄之相位資訊為雷達與地面點間 距離的函數,然因雷達波在大氣中傳遞,會因穿越 不同介質而有不同折射指數(Refractive Index),
影響雷達波的傳遞速度,造成大氣延遲誤差,此相 位資訊會受此大氣延遲影響,進而影響干涉成果,
無法獲得包含真實地表三維資訊的干涉圖。過去研 究發現,大氣層中電離層與對流層對合成孔徑雷達 差分干涉的大氣效應影響較大(Li, 2005),因此以 下針對電離層與對流層進行基本介紹。
3.1 電離層
電離層是地球大氣層被太陽射線電離的部分,
電離過程是受太陽及其活動影響,主要為獲得太陽 輻射,使大氣成為帶負電的自由電子以及帶正電的 離子。這些電子和離子會影響電磁波的行進,而產 生延遲效應,因此電離層具有非常重要的實際意義。
不同因素會造成電離層的不同狀態,如太陽輻射在 不同時段(日間、夜間)、不同季節並不相同,因 此電離層有著週期性的特色;太陽活動與太陽黑子 有密切關係,當太陽表面的黑子愈多、愈活躍,電 離層的電子密度也會愈高;因地磁影響,電子密度 也與緯度相關,在低緯度地區電子密度和變動程度
相對較低。
電離層為色散性介質(Dispersive),雷達波訊號 頻率從低頻率(< 3 kHz)至高頻率(30 GHz)都 會受到電離層影響,當雷達波訊號在電離層中傳遞 時,其折射率為一與訊號頻率相關的函數。電離層 天頂方向的相位折射率可由 Klobuchar(1996)提 出的公式表示(式 1)。
n ≈ 1- 8π2em2
eε0 𝑁𝑒 𝑓2
≈ 1 − 40.3𝑁𝑓𝑒2 (1) 其中,𝑁𝑒是電子密度(𝑚−3),𝑒是基本電荷
(Elementary charge),𝑚𝑒是電子質量,𝜀0是真空 中的電容率(Permittivity),𝑓為頻率(Hz)。由式 1 可知,在電離層中,折射率必定小於 1,因此訊 號不會產生延遲,而是相位超前(Phase advance)。
相位超前與訊號頻率有關,若以 L-band 的 JERS-1
(f 為 1.275 GHz)與 C-band 的 ERS-1/2(f 為 5.29 GHz)來比較,在 InSAR 處理中,JERS-1 的相位 超前約為 ERS-1/2 雷達波的 17 倍。
3.2 對流層
對流層是地球大氣層中最靠近地面的一層,
也是地球大氣層裡密度最高的一層,約有 80%的大 氣質量集中於此。以雷達波在傳遞過程受到的影響 來看,相較於電離層而言,由於對流層為非色散性 介質的中性大氣層,因此雷達波在傳遞時,不受訊 號頻率影響。然而,因為對流層為大氣層的最低層,
其主要特色為氣溫隨高度增大而下降,靠近地面的 空氣因溫度較高而膨脹並上升,上方空氣較冷而下 降,造成垂直方向的空氣對流現象,是故對流層之 折射率與大氣壓力、溫度及濕度相關(Li et al., 2006)。但因對流作用,大氣條件(壓力、溫度、
溼度等)隨時間空間變化複雜,所以若欲探討雷達 波訊號在對流層中傳遞時所發生的延遲,通常將總 延遲量區分為濕延遲與乾延遲,其中濕延遲主要與 水汽相關,而乾延遲主要與壓力或是溫度相關
(Saastamoinen, 1972)。
由於對流層的密度大,因此此層對電磁波的 影響最大。然實際操作上,無法得知雷達訊號通過 大氣時,所經過的各介質折射係數真實狀況,因此 通常利用地表的氣象參數(溫度、溼度、壓力)將 對流層模式化,並以此模型推算大氣延遲量。
Saastamoninen(1972)即提出利用地面測站獲得之 氣象資訊,推估對流層中乾延遲量與濕延遲量。
Massonnet 等學者於 1994 年發現干涉圖中,干 涉條紋不合理之情形,判斷此情形為干涉圖受大氣 影響而產生之誤差。在 Massonnet 提出此發現後,
許多學者開始投入大氣誤差的研究,歸納得知合成 孔徑雷達可經由不同方法進行大氣改正,例如:堆 疊法(Stacking)、加入外部輔助資料(MERIS、
MODIS)等(Li, 2005)。
4. 乾延遲改正方法
SAR 影像紀錄之相位資訊為雷達與地面點間 距離的函數,而干涉處理原理即結合兩幅不同時間 之 SAR 影像,以同一地面點與兩雷達影像間路徑 差的資訊來獲得地表資訊。雷達干涉處理中,假設 雷達波行進過程,不受外在因素影響,因此引起相 位差值之來源僅為地形高度或地表變動之路徑差 異。但實際上,自雷達發射訊號至接收回訊期間,
雷達波穿越整個大氣層,勢必受到大氣層的影響,
產生大氣延遲誤差,其主要原因,是由於電磁波在 穿越不同折射率之大氣層時以不同傳播速度前進,
故其以一彎曲路徑前進,使得量測距離增大,產生 大氣延遲(Doin et al., 2009)。因大氣誤差的存在,
在 InSAR 技術處理中,須透過大氣改正方式,將 電磁波在穿越電離層與對流層時所產生的大氣誤 差移除,亦即必須估算大氣誤差造成之距離誤差,
以改正干涉圖之相位資訊。
而在大氣延遲誤差改正的研究中,雖然過去相 關文獻指出對流層中的濕延遲為大多數大氣延遲 改正的重點(Massonnet and Feigl, 1998;Williams et al., 1998;Li et al., 2003;Janssen and Rizos, 2004;
Li, 2005;Li, 2008),但是 Hung et al.(2013)在進 行差分干涉處理時,發現單進行乾延遲改正即對
D-InSAR 成果有正面顯著的影響,因此本文以乾延 遲為探討重點,先選擇多張 PALSAR 影像分別組 成像對後執行 D-InSAR,再以差分干涉成果為被改 正之資料,更深入分析乾延遲所造成之誤差以及改 正之程度與特性。據此,以下分別說明所用之乾誤 差延遲改正公式、所需資料,以及改正方法。
4.1 乾延遲計算
本文採用之乾誤差延遲公式為 Saastamoninen
(1972)提出之大氣模型。由於實際資料處理過程 中,較難沿著電磁波傳播路徑測定對流層折射率,
因此透過 Saastamoninen 之模型,乾誤差延遲(式 2)可藉由地面測站之緯度、高度以及氣壓取得。
ZHD = (2.2779 ± 0.0024)𝑓(𝜑,𝐻)𝑃𝑆 (2)
其 中 , ZHD 為 乾 誤 差 延 遲 值 ( mm )、
𝑓(𝜑, 𝐻) = 1 − 0.00266 cos(2𝜑) − 0.00028𝐻 、 Ps 為地表壓力(HPa)、𝜑為測站緯度(度)、H 為測 站高度(km)。
由式 2 可知,若能取得地表之緯度、高度及壓 力資料,即可估算乾誤差延遲值以進行乾改正,雖 然該批資料可透過地面氣象站取得,但由於地面氣 象站,為離散分布,因此必須透過以下處理步驟計 算乾誤差延遲差異量,方能產生供作改正之面狀相 位資料。
(1)計算乾誤差延遲差異量:首先利用式 3 計算 從影像與主影像之天頂方向乾誤差延遲差異 量。
𝑍𝐻𝐷𝑑𝑖𝑓𝑧𝑒𝑛𝑖𝑡ℎ= 𝑍𝐻𝐷𝑠𝑙𝑎𝑣𝑒 − 𝑍𝐻𝐷𝑚𝑎𝑠𝑡𝑒𝑟 (3)
(2)轉至視衛星方向:因𝑍𝐻𝐷𝑑𝑖𝑓𝑧𝑒𝑛𝑖𝑡ℎ為天頂方向 延遲量,而 SAR 影像的干涉圖為 LOS 方向,
故利用三角函數,將延遲量由天頂方向轉換 至 LOS 方向(式 4):
𝑍𝐻𝐷𝑑𝑖𝑓𝐿𝑂𝑆= 𝑍𝐻𝐷𝑑𝑖𝑓𝑧𝑒𝑛𝑖𝑡ℎ
cos 𝜃
⁄ (4)
(3)克利金內插(Kriging interpolation):由氣象 站所算出之資料,為離散點位資料,為與干
涉圖之面狀連續資料計算,需透過內插以推 估氣壓之面狀分佈資料。而內插方法的選擇,
除 Goovaerts(2000)與林金樹、陳峰盛(2002)
皆指出克利金內插為氣象資料的最佳推估模 式之外,並考量由於氣壓與地勢高低有密切 關係,經測試後發現克利金內插成果亦能符 合地形趨勢,因此將採用克利金內插獲得氣 壓分佈圖。
(4)模擬成相位:為在原始干涉圖中降低乾誤差 的影響,需將面狀之視衛星方向乾誤差延遲 差異量(𝑍𝐻𝐷𝑑𝑖𝑓𝐿𝑂𝑆)轉換成相位(即模擬成 乾誤差干涉圖)。轉換公式如下(式 5):
∅𝑎= 4𝜋∙𝑍𝐻𝐷𝜆𝑑𝑖𝑓𝐿𝑂𝑆 (5) 其中∅𝑎:大氣乾誤差之相位,∆φ:乾誤差造成的 雷達回波信號相位變化量,𝜆 :雷達波長,以 ALOS PALSAR 為例,其波長為 23.6 公分。
4.2 D-InSAR 之乾延遲改正
本文採用二軌跡法進行 D-InSAR 處理,採用 軟體為 ENVI 4.7 版的 SARscape 模組 4.2 版,其中 乾延遲改正流程如圖 1 所示,將改正步驟敘述如
下。
(1)產生初始干涉圖:將兩幅選用之 SAR 影像干 涉處理得到干涉圖。為獲得良好干涉,干涉 過程中加入 DEM 輔助粗略對位,接著依精 密軌道資料與振幅資訊進行精密對位,使兩 張影像相同地面點可對位至正確位置。
(2)將乾延遲量模擬為干涉圖:計算每一 SAR 影 像對應時間之大氣乾誤差延遲值,並計算大 氣乾誤差延遲值的差值,得到乾誤差延遲差 異量,並將其模擬成乾誤差干涉圖。
(3)初始干涉扣除乾延遲干涉:由步驟(1)可得 乾改正前之初使干涉圖,經由步驟(2)可得 乾誤差延遲差異量之干涉圖。在初始干涉圖 中,扣除乾誤差干涉圖,即可得到改正後之 干涉圖,並提供後續 D-InSAR 處理。
(4)全相位回復:雷達影像在各像元中所記錄的 相位資訊為相位之非整數值,而此相位之整 數部份即為不確定值,此時必須利用全相位 回復技術回復該整數值,以得到正確的相位 值。
(5)產製地表形變圖:最後,將改正後之干涉圖,
執行 D-InSAR 以獲取地表變形量。
圖 1 乾改正流程圖
5. 乾延遲改正成果與評估
為瞭解乾延遲對 D-InSAR 所偵測出之地表形 變的影響,本文以涵蓋台灣北部地區之 PALSAR 影像進行二軌跡法差分干涉處理,得到初始地表變 形,接著再依據前述流程將乾延遲誤差移除,得到 改正後之地表變形成果,最後以同一時間段之 GPS 連續觀測資料為基準,比較並評估改正前、後之地 表變形。
5.1 實驗資料
考量台灣北部之地表覆蓋類別眾多,為全面 評估乾延遲對差分干涉之影響,本實驗採用由
ALOS 衛星承載具有較長波長的 PALSAR 合成孔 徑雷達系統所獲取之七張影像為資料(波長為 23.6 公分,屬於 L 波段),其衛星軌道(Track)為 444,
像幅編號(Frame)為 490,以重複軌道模式沿 Ascending 方向取像,再依不同時間基線長短組成 六組像對(參見表 1),配合使用 30 公尺地面解析 度之 ASTER 全球數值高程模型,執行二軌跡法差 分干涉處理。圖 2(左)所示為該影像之涵蓋範圍,
表 1 所列為 PALSAR 影像資訊。
此外,本實驗找出實驗區內中央氣象局所設 置於之氣象觀測站(其位置參見圖 2(右)),以七 張衛星影像拍攝時間點為依據,申請各觀測站之壓 力、緯度與高度,作為計算乾延遲所需之資料。
圖 2 本文使用之 PALSAR 影像涵蓋範圍(左)以及氣象站位置示意圖(右)
表 1 PALSAR 影像組成之像對資訊
像對(編號) 時間基線(天) 垂直基線(公尺)
2007/01/12-2007/02/27(I) 46 1923 2007/02/27-2007/11/30(II) 276 877 2007/11/30-2008/01/15(III) 46 396 2008/01/15-2010/01/20(IV) 736 721 2010/01/20-2010/03/07(V) 46 452 2010/03/07-2011/01/23(VI) 322 939
5.2 D-InSAR 以及乾延遲改正 成果
由 2007 年至 2011 年七張 ALOS PALSAR 單偏 極影像,組成六組像對用以偵測地表變形,各組像 對之時間基線與垂直基線長如表 1 所示。進行差分 干涉得到初始干涉圖後,接著計算每一張影像之乾 誤差延遲值,以及各像對之大氣乾誤差延遲值的差 值,再將其模擬成乾誤差干涉圖。表 2 所示即為各 張影像之氣壓統計值,可看出各個時間存在於研究 區內之氣壓值的規模差異不大,而圖 3 中(b)圖 則為各像對之乾延遲差之模擬大氣誤差干涉圖,可 觀察不同時間段的模擬成果。
六組改正前、後之二軌跡法差分干涉成果分 別標示於圖 3 中的(a)與(c),每張圖都以同樣 的顏色呈現+/- 9 公分之間在垂直方向上的地表形 變規模,此值若為正,則表示該區域於該時段在垂 直方向上呈現上升,而若為負值則為下降。首先觀 察影像涵蓋範圍內地勢較高的山區,由像對(I)-
(VI)中的(a)圖,皆可看出雪山山脈的北段延 伸至大屯山區域之地表形變規模在該幅成果中皆
相對明顯,而改正後除了像對(III)以及(V)(參 見(c)圖)之外,其餘像對皆降低了該區域地表 形變規模與範圍的顯著程度。然而,值得注意的是,
某些像對中大屯山區的地表形變趨勢在改正前、後 發生改變,例如:像對(I)在改正前是呈現上升 趨勢,而改正後變為下降;像對(V)在改正前是 下降,但改正後卻變為明顯且大規模的上升;像對
(III)、(VI)則是於改正後變為明顯且大規模的下 降。
至於地勢較為平坦的桃園與宜蘭地區,在像對
(II)、(IV)、(VI)皆發現改正前有局部特別升降 之區域,改正後也有,但是位置與分布已經不同;
而在像對(I)以及(III)中,可觀察到在桃園地 區改正前看不出局部特別升降之區域,但在改正後 偵測到明顯的地表形變,然而同樣此二組像對中的 宜蘭地區,則是改正前、後皆看不出局部特別升降 之區域。根據上述,發現乾延遲改正確實對地表形 變之偵測有不同程度的影響,為求進一步了解此改 正是否有效,後續以 GPS 觀測成果加以評估。
表 2 各張影像涵蓋範圍內之氣壓之統計值(單位:hPa)
影像日期 最大值 最小值 平均數 標準差
2007/01/12 1020 841 990.382 15.973 2007/02/27 1016 837 986.549 15.910 2007/11/30 1022 847 992.008 15.813 2008/01/15 1024 849 994.137 15.864 2010/01/20 1018 837 988.591 15.980 2010/03/07 1019 844 989.339 15.909 2011/01/23 1022 844 991.883 15.992
2007/01/12-2007/02/27 (像對 I)
2007/02/27-2007/11/30 (像對 II)
(a)
(a)
(b)
(c) (d)
(b)
(c) (d)
2007/11/30-2008/01/15 (像對 III)
2008/01/15-2010/01/20 (像對 IV)
(a)
(a)
(b)
(c) (d)
(b)
(c) (d)
2010/01/20-2010/03/07 (像對 V)
2010/03/07-2011/01/23 (像對 VI)
(a) (b)
(c) (d)
(a) (b)
(c) (d)
圖 3 六組像對之乾延遲改正之二軌跡法 D-InSAR 成果,其中(a)為改正前之差分干涉成果;(b)為 乾延遲差之模擬大氣誤差干涉圖;(c)為改正後之差分干涉成果;(d)為檢核改正效果之 GPS 站點 位分布圖,藍色點表示改正後與地真資料接近之有效改正點,橘色點表示改正後並未與地真資料接近 之無效改正點。
5.3 乾改正成果評估
為進一步評估改正之成果,本研究蒐集實驗 區域內之中央研究院設置之 GPS 測站於各像對之 時間段所發生的高程變化量,作為檢核 D-InSAR 乾延遲改正成果之地真資料,若改正後與地真資料 更為接近之點位即稱為有效改正點(以藍色點表示 於圖 3 中(d)圖),反之則為無效改正點(圖 3 中(d)圖之橘色點)。
除以圖表示各個像對之改正情形之外,下表 3 顯示位於共 51 個 GPS 測站上,六組像對在乾延 遲改正前、後的 D-InSAR 高程變化量分別扣除 GPS 量測的高程變化量之差值,藉此表示改正之效果。
若是 GPS 測站在某時間段沒有資料可解算高程變 化,該格位則以 n/a 表示,例如:像對(VI)的 KYIN。若是改正後的高程變化值與 GPS 所觀測的 結果愈接近,該點即如前述之有效改正點,而在表 3 中便以灰色網底的格位表示。例如:像對(I)的 BALN 點位在乾延遲改正前的 D-InSAR 成果與 GPS 觀 測 值 的 差 值 為 9.3 公 分 , 而 改 正 後 的
D-InSAR 成果與 GPS 觀測值的差值降低為 1.0 公 分。但是如像對(III)的 HERI 點位在乾延遲改正 前的 D-InSAR 成果與 GPS 觀測值的差值為-3.0 公 分,改正後的 D-InSAR 成果與 GPS 觀測值的差值 卻增加到-6.8 公分,即屬於無效改正點。
為了解各個像對的改正情形,依據表 3 中所 列各像對的所有差值求出各像對的全距,並再將表 3 中的所有差值取絕對值後,計算各像對之平均數 與標準差(參見表 3)。由平均數來看,像對(I)
由改正前的 2.3 公分降到改正後的 1.4 公分,為改 正程度最佳的一組;而像對(III)由改正前的 1.3 公分上升到改正後的 2.2 公分,為改正程度較差的 一組。此外,像對(I)與像對(II)在改正後的全 距與標準差皆呈現下降,表示改正後的地表形變量 與 GPS 觀測之真值的接近程度提高,有較佳的改 正效果;而像對(III)~(VI)在改正後的全距與 標準差皆增加,主要是因為在這幾個像對皆有出現 幾個改正後偏離 GPS 觀測值較大的無效點位,如:
TSHI、YM04、YMHM、GS11 等。
表 3 以 GPS 資料檢核各像對之 D-InSAR 乾延遲改正成果(單位:公分),灰色網底的格位表示乾延遲改 正後精度有提升的點位(1/2)
像對別 (I) (II) (III) (IV) (V) (VI)
改正 前 後 前 後 前 後 前 後 前 後 前 後
ANKN 3.0 3.1 0.1 -1.0 1.5 1.7 -0.8 -1.0 1.7 0.2 -2.0 0.2 BALN 9.3 1.0 -2.5 -1.2 4.2 -7.4 -2.9 0.4 -0.9 0.5 3.9 0.3 BANC -0.5 -0.5 0.9 0.5 1.7 1.5 -0.4 0.1 1.3 0.3 -1.0 -2.1
FIVE n/a -1.4 5.4 -2.7 -1.3 2.1 -8.4 -5.2 4.9 -0.9 -0.1 FUSN -2.3 -0.6 -2.1 0.4 2.4 -0.7 -2.2 -1.0 0.6 1.9 -5.3 1.1 HERI 3.5 -0.6 -1.3 0.8 -3.0 -6.8 -5.3 -4.8 -5.0 7.6 5.5 -8.3 ILAN -2.1 -1.4 0.9 1.7 0.7 1.4 4.9 -0.8 -0.9 -1.1 -1.5 1.6 KSHI -3.5 2.3 0.1 0.7 2.1 -0.1 -0.5 3.8 -1.9 -1.8 -0.3 3.0 KYIN -0.5 -0.1 -1.2 -1.2 -0.6 -6.9 1.2 2.4 -0.2 -0.1 n/a LNKO 2.3 0.7 0.3 1.2 0.3 -2.1 -1.8 -1.0 0.6 1.5 0.0 1.3 LTUN 0.5 1.0 -0.1 -1.2 0.9 1.3 0.9 0.7 -0.5 0.8 -2.3 -1.0
NIUT 0.9 -0.5 -2.8 -4.4 1.6 -2.0 -1.6 -0.5 -0.3 2.4 -1.1 -1.9 PLIN -6.5 -1.2 -5.2 0.8 -1.5 0.6 4.4 -4.3 -0.9 -2.2 -4.6 0.1 SANJ 2.7 -0.4 -1.2 0.3 -0.4 -7.0 -5.7 -2.3 -2.1 5.2 5.4 -3.7 SLNP 4.7 0.0 -2.7 -4.0 1.1 1.1 0.8 -2.4 -0.2 -0.3 -1.2 2.0 TAIP -8.3 -1.1 -1.1 2.5 -2.4 -1.6 2.1 -4.5 -2.0 1.0 -2.3 0.1 TANS 0.6 -2.0 2.4 2.4 -1.9 -4.7 -1.4 -1.0 -0.7 2.9 3.4 -1.0
表 3 以 GPS 資料檢核各像對之 D-InSAR 乾延遲改正成果(單位:公分),灰色網底的格位表示乾延遲改 正後精度有提升的點位 (2/2)
像對別 (I) (II) (III) (IV) (V) (VI)
改正 前 後 前 後 前 後 前 後 前 後 前 後
THAI 4.2 2.8 -7.8 -4.3 2.0 -3.1 -3.4 3.4 -3.7 1.5 -3.7 -5.5 TSHI 3.7 0.8 -0.4 2.6 -2.1 -4.0 -3.7 -6.5 -5.1 9.6 5.6 -7.4 WANL 0.2 -0.5 -0.7 1.9 -2.0 -1.5 -0.7 -3.7 -3.8 4.3 2.5 -5.5 WUKU 2.0 -3.9 -0.4 3.0 -1.1 -3.2 -0.1 -1.7 -1.0 0.0 0.1 2.0 YAME -0.6 2.3 -1.2 -0.6 1.4 -0.4 0.6 3.0 -1.3 -2.5 0.3 2.9 YNTS 7.4 -1.2 0.2 0.0 0.3 2.8 3.3 -4.3 0.3 -1.6 -2.0 2.6 FCWS -2.0 1.1 0.5 1.0 0.9 -0.5 0.5 2.9 -0.9 -2.3 -1.9 2.6 S101 0.8 0.2 1.0 0.4 -1.2 -0.4 0.4 -1.0 -0.7 -1.1 -0.6 -3.5 YM01 2.6 -0.7 -1.4 2.3 -1.1 -2.4 -1.1 -2.6 -3.4 2.2 2.3 -4.1 YM02 -0.6 -3.9 1.6 2.9 -0.2 -1.2 -2.3 -2.5 -2.9 -1.0 3.0 -1.5 YM03 3.9 -1.6 0.6 5.2 -1.5 -3.0 1.2 -3.4 -4.4 4.4 3.2 -2.0 YM04 0.4 -1.5 -6.1 2.6 0.8 -1.7 -0.4 -4.7 -6.2 6.7 1.5 -2.7 YM05 -2.3 -2.5 0.7 3.6 -0.8 -2.4 0.2 -2.3 -4.8 1.8 1.7 -1.8 GS01 -1.4 -0.2 0.1 -0.6 -0.8 -0.4 0.4 0.0 2.1 0.9 -2.5 -2.8 GS08 -1.6 -2.7 -0.8 1.4 -0.6 -3.5 -2.9 -3.6 -1.9 2.6 2.8 -3.0 GS09 0.6 -2.4 -0.8 2.4 -0.9 -1.6 -1.0 -5.1 -2.6 3.9 0.7 -5.4 GS10 1.4 -0.1 1.5 1.8 -1.5 -2.9 -1.1 0.9 -0.5 1.6 2.7 -2.3 GS11 -1.5 -2.4 1.8 2.0 -1.4 -2.4 -2.0 -0.1 0.1 1.7 1.5 -10.7 GS12 0.1 0.6 -1.1 -0.1 0.1 -0.9 0.2 1.1 0.5 0.7 -0.8 -2.6 GS13 -1.0 -0.5 -1.0 -0.9 1.1 0.7 0.3 -2.2 1.0 0.3 -2.1 -7.5 GS19 -0.3 -0.9 1.1 0.3 -2.2 -1.1 1.7 -2.8 -1.9 -1.9 -0.1 -4.1 FUSI 1.8 -1.8 -0.5 1.9 0.0 -1.3 0.5 1.7 0.8 0.6 -3.0 1.1 SHMN 2.9 -1.1 -2.7 -0.3 -2.0 -5.0 -4.7 -4.4 -3.2 7.0 4.4 -7.3 SIND -2.9 -0.8 -2.7 -1.5 -0.5 0.2 3.0 2.5 0.5 -1.0 -4.3 2.3 YMSM -3.8 -3.8 -2.2 2.3 -1.1 -1.1 -1.7 -3.8 -4.1 10.8 -1.3 -4.2
SA04 -0.3 1.1 -1.7 -0.2 1.4 0.1 n/a n/a n/a
SPP0 -0.4 0.9 -1.3 0.2 1.8 0.7 n/a n/a n/a
CSRF 3.4 -0.8 -0.8 -1.8 2.6 2.9 0.6 0.0 1.1 -0.3 n/a TWTF -0.8 2.4 -0.7 0.0 1.5 -0.6 -1.9 0.3 -0.6 -1.2 1.0 2.3 TCYU -2.2 -1.6 -1.2 -0.8 1.3 -1.0 0.7 3.3 0.2 -1.7 -0.8 -0.7 YILN -2.5 -1.4 0.0 1.9 1.4 2.3 3.2 1.0 -1.5 -1.4 -2.2 0.4
LYTU n/a 1.8 -2.6 1.0 3.0 n/a n/a n/a
SINP 0.6 -2.8 3.1 3.3 -0.2 -4.4 n/a n/a n/a
NTPU 0.9 -0.6 1.8 1.5 -0.1 0.0 n/a n/a n/a
全距 17.7 7.0 10.9 9.8 7.2 10.4 10.7 12.2 8.3 13.3 10.9 13.6 平均 2.3 1.4 1.5 1.7 1.3 2.2 1.8 2.5 1.9 2.4 2.3 2.9 標準差 2.1 1.0 1.5 1.4 0.8 1.9 1.5 1.8 1.7 2.5 1.6 2.4
表 4 各組像對之有效改正點之比例與改正幅度
像對(編號) 改正點比例 改正幅度全距 平均改正幅度
2007/01/12-2007/02/27(I) 29/49 ≈ 0.59 0.012 ~ 0.990 0.624 2007/02/27-2007/11/30(II) 22/51 ≈ 0.43 0.002 ~ 0.931 0.592 2007/11/30-2008/01/15(III) 20/51 ≈ 0.39 0.027 ~ 0.943 0.524 2008/01/15-2010/01/20(IV) 19/46 ≈ 0.41 0.031 ~ 0.960 0.541 2010/01/20-2010/03/07(V) 18/46 ≈ 0.39 0.009 ~ 0.961 0.483 2010/03/07-2011/01/23(VI) 16/44 ≈ 0.36 0.141 ~ 0.975 0.630
本文亦將各組像對之有效改正點除以該時期 所有可用之 GPS 點總數,得到有效改正點比例(參 見表 4),以像對(I)為例,該時期可用以檢核之 所有 GPS 點位有 49 點,經乾改正後改善之點位有 29 點,因此得到有效改正點比例為 0.59,整體來 說有效改正之比例範圍為 0.36 ~ 0.59,像對(I)
改正效果最佳。表 4 亦呈現有效改正點之改正幅度,
其算法為改正前 SAR 偵測之地表變形成果與 GPS 實際變動量差距(設為 p),減去改正後 SAR 偵測 之地表變形成果與 GPS 實際變動量差距(設為 q), 並將此數值標準化((|𝑝| − |𝑞|)/(|𝑝|)),以得到改 正幅度。據此,若此值愈接近 1,則表示改正成果 愈好。下表 4 顯示所有像對檢核之 GPS 點位上,
皆有改正幅度大於 0.9 之數值,表示部分點位改正 成果良好。從統計數據來看至少有 36%以上的點呈 現乾改正有效,且平均改正幅度至少可達 48.3%。
綜合有效改正點比例與平均改正幅度來看,除可發 現像對(I)的有效改正點比例與平均改正幅度皆 很高之外,也可觀察到雖然像對(II)與(VI)的 有效改正點比例較低,但是其平均改正幅度卻很 高。
6. 討論
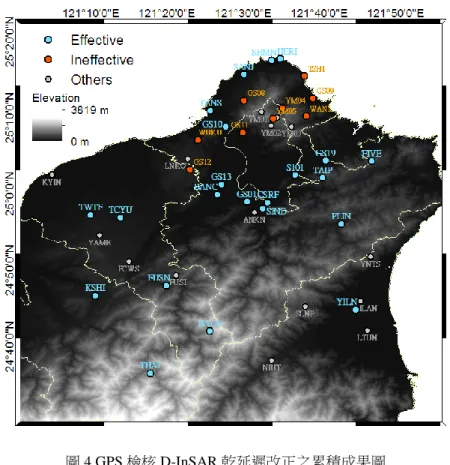
為進一步在空間中呈現 GPS 點位在六個像對 中之乾延遲改正程度,本研究挑選出在三組或是三 組以上為有效改正之點位共 22 個,在表 3 中將其 編號以藍色顯示,並在圖 4 中以藍點表示;反之,
亦找出在六組像對中皆無或是只有一組為有效改 正之點位共 9 個,在表 3 中將此類點位的編號以橘 色顯示,在圖 4 中以橘點表示,最後成果如圖 4 所示。
由圖 4 所呈現藍點與橘點的空間分布可知,22 個有超過一半的機會可以被有效改正的點位為均 勻分布在影像涵蓋區域;而在這次測試中普遍無法 被有效改正的 7 個點位卻呈現集中的趨勢,其分布 的範圍大約從新北市金山沿著大屯山到五股、林口 一帶,而會造成此區域的乾延遲改正效果不佳的原 因 , 可 從 以 下 兩 方 面 討 論 : 首 先 , 本 文 採 用 Saastamoninen ( 1972 ) 提 出 之 大 氣 模 型 處 理 在 D-InSAR 過程中因為乾延遲所造成的誤差,而該模 型在估算乾延遲誤差主要是依據研究範圍內之氣 壓差。基於此,本研究蒐集研究範圍內之氣象站所 提供的氣壓資料(氣象站位置請參見圖 2),並採 用 Kriging 內插方法產生符合地形趨勢之面狀氣壓 差資料(參見 4.1 說明),作為乾延遲改正之依據。
雖然依此執行乾改正在大部分區域皆為有效,但若 由橘點分布的位置來看,該區位於大屯火山區,由 於該區域為火山地形,具備特殊的地形起伏與複雜 的地勢,因此整個大範圍的內插成果並無法精確呈 現該局部地區的氣壓差資訊,推測此因素導致橘點 分布區域的乾改正效果不佳。針對此問題,若能配 合更高解析度的數值地形模型,並在地形特徵點實 地蒐集氣壓資料,預期將可改善此區域之乾改正精 度。
圖 4 GPS 檢核 D-InSAR 乾延遲改正之累積成果圖 另一項要考慮的問題是當地的氣候條件。由於
大屯山區地勢較高,氣溫較鄰近之臺北盆地約低 3 至 4 度,呈現冬冷夏涼的季節特性,且因為本區複 雜的地形與地勢,致使局部地區微氣候變化相當明 顯。此外,該區域具備亞熱帶地區季風型氣候特徵,
即夏季受到西南季風影響,午後常有雷陣雨,冬季 則因東北季風南下而變得潮濕多雨,年雨量多達 4000 毫米,每年降雨日數也在 190 天以上(陽明 山國家公園,2014)。在這樣多變的氣候條件下,
D-InSAR 執行過程中主要的大氣誤差來源或許並 不是乾延遲,而應是與水汽相關的濕延遲所造成的 誤差。為驗證此項推論,必須蒐集與雷達影像拍攝 時間相同之水汽相關資料,於進行濕延遲改正後評 估。
7. 結論
本文主要為處理 D-InSAR 過程中因為大氣延 遲中的乾延遲所造成的誤差。由六組 PALSAR 影 像像對改正後之評估成果得知,有效改正點比例在 0.36 至 0.59 之間,而有效改正點之平均改正幅度 在 48.3%至 63.0%之間,可知乾改正之執行對於達
成較高精確度之地表形變確有效果,因此建議以二 軌跡法雷達差分干涉獲得成果後,應該再繼續進行 乾延遲改正。
由本文實驗成果可知,大氣乾延遲改正確能提 高地表形變之精度,但若進一步考量到台灣地區上 空之氣候條件多變,將會導致濕延遲效應,因此後 續將以同樣像對進行對流層之濕延遲改正與評估,
以期獲得更高精度之面狀連續地表形變。
致謝
本文作者感謝國立台灣大學地質科學系胡植 慶教授提供完成本文所需之處理軟體 ENVI。此外,
本文的兩位匿名審查委員提供許多寶貴意見供作 者參考,特此致謝。
參考文獻
林金樹、陳峰盛,2002。空間統計之半變異數模式 對推估降雨量空間分布之影響,2002 中華地 理資訊學會年會暨學術研討會,台中,逢甲大 學:民國 91 年 10 月 3 日至 10 月 4 日。
陽 明 山 國 家 公 園 , 2014 。 氣 象 景 觀 , http://www.ymsnp.gov.tw/index.php?option=co m_content&view=article&id=19&gp=0&Itemid
=175。[2014 年 5 月 10 日]
謝嘉聲,2006。以雷達干涉技術偵測地表變形之研 究,博士論文,國立交通大學土木工程研究 所。
Bayuaji, L. and Sumantyo, J.T.S., 2011. ALOS Palsar for temporal analysis of surface deformation on mud volcano eruption in Sidoarjo using D-InSAR technique, Paper presented at ACRS, Chinese Taipei Society of Photogrammetry and Remote Sensing; Center for Space and Remote Sensing Research, National Central University;
Asian Association on Remote Sensing;
International Society for Photogrammetry and Remote Sensing, Taipei, Taiwan, October 3 - 7, 2011.
Campbell, B.A., 2002. Radar Remote Sensing of Planetary Surfaces. Cambridge : University Press.
Doin, M.P., Lasserre, C., Peltzer, G., Cavalié, O. and Doubre, C., 2009. Corrections of stratified tropospheric delays in SAR interferometry:
Validation with global atmospheric models, Journal of Applied Geophysics, 69: 35-50.
Ferretti, A., Monti-Guarnieri, A., Prati, C., Rocca, F., Milano, P.d. and Massonnet, D. 2007. InSAR Principles: Guidelines for SAR Interferometry Processing and Interpretation. Netherlands : ESA.
Gabriel, A.K. and Goldstein, R.M., 1988. Crossed orbit interferometry: theory and experimental results from SIR-, REMOTE SENSING. 9(5):
857-872.
Gens, R. and Genderen, J.L.V., 1996. SAR interferometry-issues, techniques, applications, REMOTE SENSING. 17(10): 1803-1835.
Goovaerts, P., 2000. Geostatistical approaches for incorporating elevation into the spatial interpolation of rainfall. Journal of Hydrology, 228: 113-129.
Hooper, A., 2006. Persistent scatterer radar interferometry for crustal deformation studies and modeling of volcanic deformation, published doctoral dissertation, stanford university, Julianalaan 134, Delft, the Netherlands
Hung, L.C., Tsai, Y.L. and Lin, S.Y., 2013. Mitigation of atmospheric delay from InSAR processing, Asian Conference on Remote Sensing, Indonesia.
Janssen, V., Ge, L.L. and Rizos, C., 2004.
Tropospheric Corrections to SAR Interferometry from GPS Observations. GPS Solutions, 8:
140-151.
Klees, R., and D. Massonnet. 1999. Deformation measurements using SAR interferometry:
potential and limitations. Geologie en Mjinbouw 77: 161–76, 196–201.
Klobuchar, J.A., 1996. Ionospheric effects on GPS, in Global Positioning System: Theory and Applications (Volume I). pp. 485-515, edited by B.W. Parkinson, and J.J. Spilker Jr., Washington, DC : American Institute of Aeronautics and Astronautics
Li, Z.H., 2005. Correction of atmospheric water vapour effectson repeat-pass SAR interferometry using GPS, MODIS and MERIS data, Ph.D. Dissertation, University College London, London.
Li, Z.H., 2008. Reduction of atmospheric water vapour effects on ENVISAT ASAR interferograms using MERIS near IR measurements, The XXI Congress of the International Society for Photogrammetry and Remote Sensing Beijing:China.
Li, Z.H., Muller, J.P., Cross, P., Fielding, E.J., 2005.
Interferometric synthetic aperture radar (InSAR) atmospheric correction: GPS, moderate resolution Imaging spectroradiometer (MODIS), and InSAR integration, Journal of Geophysical Research - Solid Earth, 110(B3), B03410.
Li, Z.W., Ding, X.L, Huang, C., Wadge, G. and Zheng, D.W., 2006. Modeling of atmospheric effects on InSAR measurements by incorporating terrain elevation information, Journal of Atmospheric and Solar-Terrestrial Physics, 66(2006): 1189-1194.
Li, Z.W., Ding, X.L., Liu, G.X. and Huang, C., 2003.
Atmospheric effects on InSAR measurements - A review, Geomatics Research Australasia, 79, 43-58.
Massonnet, D., Carmona, M.R.C., Adragna, F., Peltzer, G., Feigl, K. and Rabaute, T.,1993. The displacement field of the Landers earthquake mapped by radar interferometry,Nature,364(8):
138-142.
Massonnet, D. and Feigl, K.L., 1998. Radar interferometry and its application to changes in the earth's surface, Reviews of Geophysics.
36(4): 441-500.
Saastamoinen, J., 1972. Atmospheric correction for the troposphereand stratosphere in radio ranging of satellites, Geophysical Monograph Series, 15:
247-251.
Tarayre, H. and Massonnet, D., 1996. Atmospheric
Propagation Heterogeneities Revealed by ERS-1 Interferometry. Geophysical Research Letters, 23: 989-992.
Williams, S., Bock, Y. and Fang, P., 1998. Integrated Satellite Interferometry: Tropospheric Noise, GPS Estimates and Implications for Interferometric Synthetic Aperture Radar Product. Journal of Geophysical Research, 103:
27051-27068.
Zebker, H.A. and Rosen, P., 1994. On the derivation of coseismic displacement fields using differential radar interferometry: The Landers earthquake, Journal of Geophysical Research:
Solid Earth. 1(1994): 286-288.
1 Assistant Professor, Dept. of Land Economics, National Chengchi University Received Date: Mar. 09, 2014
2 Graduate Student, Dept. of Land Economics, National Chengchi University Revised Date: Apr. 18, 2014
3 Master, Department of Geomatics, National Cheng Kung University Accepted Date: Jul. 18, 2014
*.Corresponding Author, Phone: 886- 2-29393091 ext.51651, E-mail: [email protected]
An Assessment of Dry Delay Correction in D-InSAR Processing
Shih-Yuan Lin 1* Lien-Chi Hung 2
ABSTRACT
Synthetic Aperture Radar (SAR) is capable of day/night and all-weather data acquisition, moreover, detection of centimeter-level deformation is achievable through differential interferometric synthetic aperture radar (D-InSAR) technique. However, due to the atmosphere delay, the surface deformation extracted through D-InSAR processing is incorrect. In order to improve the accuracy, the atmospheric correction is required. This paper focused on the reduction of errors caused by dry delay. A total of seven ALOS PALSAR images acquired from 2007 to 2011 was processed with 2-pass D-InSAR technique to extract surface displacement. Once this was achieved, dry delay effect was computed based on the data collected from local weather stations and then applied to remove the atmospheric dry delay error. It was shown that the accuracy of 36% to 59% of the check points in the six pairs was improved after dry delay correction. The characteristics of the dry delay effect were also examined. It was suggested that dry delay correction is essential for achieving accurate D-InSAR surface displacement results.