行政院國家科學委員會專題研究計畫 成果報告
使用脊柱二維 X 光影像及三維模型重建以輔助脊椎側彎之 臨床分析
研究成果報告(精簡版)
計 畫 類 別 : 個別型
計 畫 編 號 : NSC 99-2221-E-011-124-
執 行 期 間 : 99 年 08 月 01 日至 100 年 07 月 31 日 執 行 單 位 : 國立臺灣科技大學資訊工程系
計 畫 主 持 人 : 吳怡樂 共 同 主 持 人 : 賴伯亮
計畫參與人員: 碩士班研究生-兼任助理人員:許傑貫 碩士班研究生-兼任助理人員:周炎綱 博士班研究生-兼任助理人員:洪偉智
公 開 資 訊 : 本計畫可公開查詢
中 華 民 國 100 年 11 月 29 日
中 文 摘 要 : 要評估脊椎側彎程度,傳統的方法是使用卡布氏方法,需要 定位出正確的上下端椎板,該方法對於椎板定位錯誤十分敏 感。本研究提出了脊椎側彎曲線量測的方法,能夠自動地擬 合脊椎曲線。使用脊椎曲線上曲率最大的特性來評估脊椎側 彎程度。最後,我們嘗試從雙平面 X 光影像中建立三維脊柱 模型。實驗結果表示,我們提出的方法比起傳統的方法有較 少的平均誤和變異;自動地重建三維脊柱模型還是需要更多 的資訊。
中文關鍵詞: 脊椎側彎、卡布角、脊椎側彎曲線量測、曲率 英 文 摘 要 :
英文關鍵詞:
行政院國家科學委員會補助專題研究計畫 行政院國家科學委員會補助專題研究計畫 行政院國家科學委員會補助專題研究計畫
行政院國家科學委員會補助專題研究計畫 ■ ■ ■ ■ 成 果 報 告 成 果 報 告 成 果 報 告 成 果 報 告
□
□
□
□期中進度報告 期中進度報告 期中進度報告 期中進度報告
使用脊柱二維 X 光影像及三維模型重建以輔 助脊椎側彎之臨床分析
計畫類別:■ 個別型計畫 □ 整合型計畫 計畫編號: NSC 99-2221-E-011-124
執行期間: 2010 年 8 月 1 日至 2011 年 7 月 31 日
計畫主持人: 吳怡樂 共同主持人: 賴伯亮
計畫參與人員:洪偉智 周炎綱 葉俊材 許傑貫
成果報告類型(依經費核定清單規定繳交):■精簡報告 □完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
執行單位: 國立臺灣科技大學 資訊工程學系
中 華 民 國 100 年 10 月 31 日
使用脊柱二維 使用脊柱二維 使用脊柱二維
使用脊柱二維 X XX X 光影像及三維模型重建以輔助脊椎側彎之臨床分析 光影像及三維模型重建以輔助脊椎側彎之臨床分析 光影像及三維模型重建以輔助脊椎側彎之臨床分析 光影像及三維模型重建以輔助脊椎側彎之臨床分析
摘要 摘要摘要 摘要
要評估脊椎側彎程度,傳統的方法是使用卡布氏方法,需要定位出正確的上下端 椎板,該方法對於椎板定位錯誤十分敏感。本研究提出了脊椎側彎曲線量測的方 法,能夠自動地擬合脊椎曲線。使用脊椎曲線上曲率最大的特性來評估脊椎側彎 程度。最後,我們嘗試從雙平面 X 光影像中建立三維脊柱模型。實驗結果表示,
我們提出的方法比起傳統的方法有較少的平均誤和變異;自動地重建三維脊柱模 型還是需要更多的資訊。
一 一 一
一、 、 、緒論 、 緒論 緒論 緒論
脊柱(spine)是人體軀幹的支柱,由七節頸椎(cervical spine)、十二節胸椎(thoracic spine)、五節腰椎(lumbar spine)、五節薦椎(sacrum)、三節尾椎(coccyx)排列而成。基 本上從正面或後面所看到的脊柱應該是成一直線,從側面看則有頸前凹(cervical lordosis)胸 後凸(thoracic kyphosis)腰前凹(lumbar lordosis)三個彎,假若由正面或後面所視有左右彎曲不 對稱,就是所謂的「脊椎側彎」(scoliosis)。當一個人有脊椎側彎時,從後面看,脊椎則呈 現彎曲,常見的有 S 型或 C 型。臨床上認為大於 10 度為有意義的脊椎側彎。
評估脊椎側彎的程度與治療過程常常使用理學檢測、X 光檢測和電腦斷層掃描
(computerized tomography)三種檢測方法。
理學檢測其主要的評估資訊與依據是由前屈彎曲測驗(Adams forward bending test) 所得。其檢測的方式為讓接受檢查之受測者進行前屈彎曲測驗,然後觀察受測者之身體外 部是否有兩側肩膀不同高、一側肩胛骨較明顯、一側髖關節突出、骨盆傾斜、腰椎前凸,
這些一般脊椎側彎之病人會有的情況,經由觀察是否有出現某部分這些情況,來判斷是否 有脊椎側彎。
X 光片人工脊椎側彎的測量方式脊椎側彎的角度定量方式採用卡布氏方式(Cobb method),傳統上必須先取得病患之平面二維全脊柱 X 光片(whole spine X-ray),以目視方 式選定某彎曲脊柱的上端椎體(superior end vertebra)與下端椎體(inferior end vertebra),
上端椎體的上端椎板(superior endplate)與下端椎體的下端椎板(inferior endplate)的切線 交角,即為卡布角(Cobb angle)(圖 1 左)。但是上端椎體與下端椎體的選擇,可能因測量 者不同,而產生誤差。切線的選擇亦可能因照片模糊而產生誤差。測量產生之誤差有 2 類:
第一:同一測量者變異性(intraobserver variability),第二:不同測量者間變異性(interobserver variability)。測量者的經驗、影像的清晰度、角度的大小等因素影響測量的準確度[12]。Kuklo 等人比較人工方式與數位元影像方式測量脊椎側彎的彎曲度(卡布角),發現兩者之間的誤 差很小,建議可以利用數位 X 光影像來評估脊椎側彎[15]。
圖 1: 左圖:二維全脊柱 X 光片卡布角示意圖。右圖:脊椎三維重建示意圖 (圖片來源:
[17])。
電腦斷層掃描提供準確的病症診斷,例如先天性脊椎側彎[20]或為了手術計畫(for surgical planning)[14]。傳統上我們要建立脊椎的三維模型(如圖 1 右)主要是從電腦斷層 掃瞄,利用 snake 演算法或者 lazy snapping 演算法將特定目標資料自動的挑選出來,在進 行三維模型重建。但是對整個脊椎型態(morphology)做一個全域(global)分析,將需要大數 量的切片(slices)並會給病人帶來相當大的輻射劑量。
隨著雙平面(biplanar)X 光照相技術在臨床使用發展的進步,需要同時有快的重建方法 以及好的準確性,以替代電腦斷層掃描。為了要能自動化重建過程,一種依據影像處理以 及 2D/3D 註記的統計可變形模型(2D/3D registration of statistical deformable models)的方法 [8,13]被開發出來。然而影像處理受到骨質結構的重疊和 X 光的品質影響以及要有良好的初 始化[8]。
理學檢測在脊椎側彎角度較小時,可被觀察的現象較不明顯,不容易判斷是否有側彎 現象出現,因此應用於第一階段篩選檢測,之後再使用能提供精確結果的 X 光檢測或電腦 斷層掃描,而本研究主要探討的是 X 光檢測部分,利用所提出的方法自動地估算脊椎側彎 程度。我們也嘗試使用雙平面 X 光的脊椎三維模型重建的人工方法,對站著的病人提供了 脊椎三維分析,並只帶有低輻射劑量。事實上,每塊脊椎骨(vertebrae)(在每張正面與側面 X 光中,脊椎骨體(vertebral body)包含了 4 個角(corner))只需要鑑定 8 個點。然而,手動確認 每一塊椎骨之間的關係仍然是必要的。
二 二 二
二、 、 、研究架構 、 研究架構 研究架構 研究架構
在這個章節中,我們會對脊椎側彎曲線量測方法做一些討論。在 2.1 小節中說明脊椎 節定位的方法;2.2 小節中說明基於曲線擬合方法的脊椎側彎曲線量測;2.3 小節中說明如 何從雙平面中重建脊椎三維模型。
2.1. 脊椎節定位
基於我們過去的研究[1,22],沿用模板比對方法來定位脊椎節,並做了些改進。定位脊 椎節位置的動作,可分為兩個階段(一)以模板比對方式,大略的找出脊椎節的位置。(二)再 根據兩兩脊椎節所形成的彎曲角度,調整模板應旋轉的角度並重新比對,找到更精準的脊 椎節位置。
從原始影像中切割出主要區域
首先計算出垂直及水平投影向量,並以平均值做為門檻。只保留大於門檻值的最上端 與最下端(最左端與最右端)之間的區段,切割出主要的區域。圖 2 (b)為圖 2(a)的水平投影,
橫軸為像素值,縱軸為圖 2(a)中的位置。由圖 2(b)可看出像素值有較大反應的位置,藉以 切割出主要區域的上下端,而圖 2(c)則可切割出左右兩端。
圖 2:(a) 原始影像 (b) 水平投影向量 (c) 垂直投影向量
找到頸椎上端的位置
以垂直投影的方式找出頸椎上端的位置。在圖 3(a)中,兩紅線間為當前計算的區域,
計算出垂直投影像量(圖 3(b) ),並可得知此區段的頭部寬度。假設影像解析度為 X*Y,則 設定 X/3 為頭部寬度的此門檻值,若小於此門檻值,則認定找到頸椎的上端。
圖 3:(a) 計算頭部寬度的範圍 (b) 圖 3(a)中紅線區域的垂直投影向量
尋找各頸椎節的中心
以所找到脊椎上端位置為基準,尋找各頸椎節的中心。結合亮度及邊緣(edge)資訊(圖 4a),使用不同大小的矩形模板由上往下尋找脊椎中心。邊緣資訊是以 sobel 遮罩,對影像 做 convolution 計算而得。公式(1)為強調水平方向的邊緣資訊,將其轉置後則為強調垂直方 向的資訊。將水平與垂直方向的資訊取絕對值並加總後(公式 2),形成圖 4(a)的邊緣資訊。
−
−
−
=
1 2 1
0 0 0
1 2 1
H (1)
.
, ' operation
n convolutio the
is where
H image original H
image original image
sobel
∗
∗ +
∗
= (2)
搜尋的方式以模板比對的方法來完成。模板可視為假想的脊椎節,因此模板的尺寸應 儘可能的接近該脊椎節的大小。
以各種不同的位置 P 視為脊椎節中心,計算模板內的像素值總和作為分數。如圖 4(b) 表示在不同位置以模板尋找脊椎節,若是符合脊椎的位置(藍色區域),則計算出的分數會較 高。若 P 為各種可能的脊椎節中心位置的集合,P={p1, p2,…pn},則 P 的搜尋範圍應有所 限制,以符合實際的情況。T 為各種不同大小的模板集合,T={t1,t2,…tm}。令 N(p1,t1)為 以 p1 為脊椎中心,t1 為模板所計算出的分數,則 Max( N( P, T) )所找出的脊椎中心與模版 大小視為最理想的(如圖 4(b)中的藍色中心及模板)。在該脊椎節完成後,以此位置為基準,
使用相同方法尋找下一個脊椎節。
由上述的方法,可分別計算出亮度與邊緣兩種分數,而亮度與邊緣分數的權重比設定 為 2:1 有較好的結果,這是由於在大多數的影像中,邊緣資訊很容易受到肋骨、心臟、雜 訊的影響,若是佔有較大的權重,則容易找到錯誤的結果。由於部分頸椎被頭部影像遮蔽,
因此在找到剩餘的三節頸椎節後,便開始搜尋胸椎。頸椎部分搜尋的結果如圖 4(c)
圖 4:(a) 邊緣資訊 (b) 模板搜尋示意圖 (c) 頸椎節中心的搜尋結果
尋找胸椎及腰椎各節的中心
此部份也是以模板來尋找脊椎的位置,但是邊緣資訊分數的計算方式有所變更,亮度 部份則沒有更動。這是由於我們觀察到三件事情:
在邊緣資訊的影像中,胸椎及腰椎的中間部份是邊緣值較低的(接近黑色) 強調平行方向的邊緣資訊非常不明顯
強調垂直方向的邊緣資訊中,右側(靠近心臟)較為不明顯
如圖 4(a),可看出上述特性。雖然每張影像不盡然完全符合這樣的情況,但是有多數
的影像具有這些特性,因此根據這些特性強化比對的方法,其搜尋結果如圖 5。
圖 5:脊椎節搜尋結果
(二) 脊椎節定位(第二個階段)
這個部份主要是調整先前找到的脊椎節位置,檢查是否符合物理上的限制,並求出符 合脊椎曲線的曲線方程式。調整的方式為,根據物理上的限制,修改錯誤的脊椎節位置。
如圖 6,紅色的點為脊椎節位置,以此例來看,可合理判斷圖 6(左)第三節、圖 6(右)第二節 的位置有誤。
圖 6:錯誤的脊椎節示意圖
第一階段所找到的脊椎節中心為 p1, p2,…pn,分別計算出脊椎節所形成的角度αi = angle(pi, pi+1)。若αi 與αi+1 的角度相差到一定程度,就必須判斷是哪個脊椎節的位置有 誤。調整完後的結果如圖 7。
圖 7:調整完後的結果
脊椎節定位的方法也適用於側面 X 光影像部分,只需要修改模板大小不同與偵測的起 始點位置(從腰椎開始偵測)。在圖 8 中紅色框框部份為薦椎,薦椎具有高度的不變性,不受 姿勢的影像有所變化,有助於我們定位腰椎。側面 X 光影像中的偵測結果,如圖 9 所示。
圖 8:側面腰部 X 光影像
圖 9:側面脊椎搜尋結果
2.2. 基於曲線擬合方法的脊椎側彎曲線量測
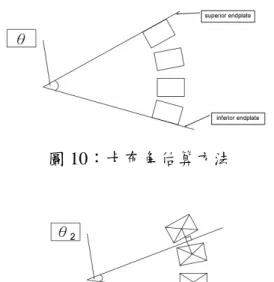
傳統上採用卡布角(如圖 10)來估算,但是該方法容易受到測量者本身、參考點的選擇、
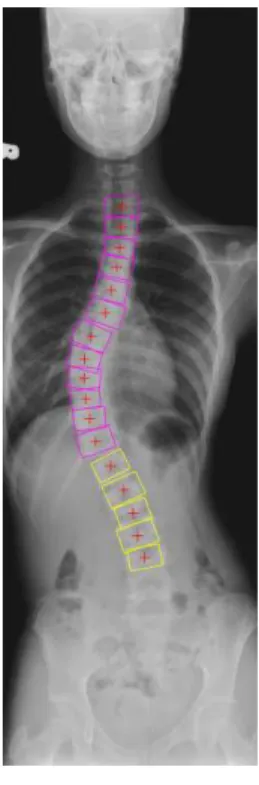
影像解析度影響到正確性。所以,我們採用脊椎節中心連線的估測方法(vertebral centroid measurement, VCM)來估算每節脊椎節之間的角度,該方法能夠減少測量者選定參考點時產 生的誤差,如圖 11 所示,但是這個方法用來估測最大角度時,會因平滑(smooth)效果導致 角度估算錯誤。
圖 10:卡布角估算方法
圖 11:脊椎中心連線估算方法
有鑑於此,我們提出了一個使用曲線擬合(Curve Fitting)來評估脊椎的最大角度。使用 最小中位數平方法(Least Median of Squares,LMedS ),求出符合脊椎曲線的曲線方程式。
首先將脊椎由上至下分為七個部份,並從每個部份中挑選一節脊椎,並以這七個脊椎節中 心位置解出六次曲線方程式。接著將其餘脊椎節位置帶入方程式,計算誤差,並找出誤差 中位數。脊椎節的選取總共有 3^7 種組合,在計算出所有的曲線方程式及誤差中位數後,
選取誤差中位數最小的曲線方程式,作為符合脊椎曲線的結果。
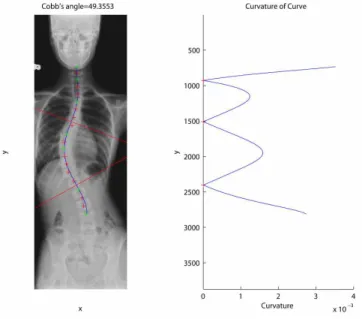
接著,要找出可能形成最大彎曲角度的位置。在此以公式(3)作為判斷的標準。如圖 12 所示,左側藍線為由脊椎節中心位置所找出的六次曲線方程式,右側為對應的曲率(curvature) 值。而產生最大彎曲角度的位置(左圖紅線位置)通常位於曲率極大值附近,因此只要在其附 近找出所有角度,就能找到最大彎曲角度。
2 3 2) ) ( ' (1
) ( ''
y f
y curvature f
+
= (3)
圖 12:估算出來的脊柱曲線和曲率
2.3. 重建脊椎三維模型
重建脊椎三維模型可分為下列幾個步驟:(一)脊椎節定位(正面與側面 X 光影像)、(二) 髖臼定位、(三)建立脊椎節間的關係以及(四)重建脊椎三維模型與微調整。
(一) 脊椎節定位
利用 2.1 小節中所說明的方法來定位正面與側面 X 光影像中的脊椎節。
(二) 髖臼定位
重建三維模型的過程中,最重要的課題就是定義三維世界座標中心。在此,我們選擇 髖臼作為主要的參考點,髖臼的不變性高,理由如下所述:在我們拍攝正面與側面的 X 光 片影像時,會因為身體姿勢有所不同(拍攝正面時:通常我們是用站立的姿勢,採取最自 然的方式拍攝;拍攝側面時:則會將手舉高避免遮蔽胸腔與腰部),導致身體延展開來,造 成正面與側面資訊無法正確的對應,所以重建三維模形會變得困難。髖臼與大腿骨接合的 部份是呈現半圓形,我們可以利用圓形偵測來定位髖臼,如圖 13 所示。
圖 13:定位髖臼
(三) 建立脊椎節間的關係
我們可以利用從正面 X 光影像中找出來的每一節脊椎與整體脊柱曲線作為依據,自動 的計算出 L.Humbert[17]所提出的每節脊椎參數其中 8 個參數(三維脊椎節模型的高度、寬 度、深度),並利用偵測到的每一節脊椎節位置計算出兩兩脊椎節之間的關係:脊椎節間連
結關係、所夾的角度、間隔的距離、椎體大小變化…等,如圖 14 所示。我們也使用 2.2 小 節中的方法求得整體脊柱曲線,並計算出側彎的最大角度、側彎的類型是 S 型或 C 型、駝 背角度…等。
圖 14:脊椎參數化模型,圖片來源:[17]
(四) 重建脊椎三維模型與微調整
利用前述所得到的三維座標點,以內差的方式建立新的三維座標標點,完成初步的脊 椎三維模型重建。最後,將正面與側面的脊椎節位置和脊柱曲線以及分類出來的側彎類型 作為參考依據,對三維模型做細部的微調:平移、旋轉、放大/縮小…等方式來調整每一節 脊椎。
三 三 三
三、 、 、實驗結果 、 實驗結果 實驗結果 實驗結果
在這個章節中,我們會討論一些實驗結果與困難之處。3.1 小節中說明所使用的實驗數 據集;3.2 小節中說明及脊椎節定位結果;3.3 小節說明比較了不同的角度估算方法來評估 脊椎側彎程度;3.4 小節說明脊椎三維重建的可行性與能夠提供的資訊。
3.1. 實驗數據集
我們收集了兩組數據集:
1. 20 份正面 X 光影像做為測試集,以醫師估算出來的卡布角結果作為正確答案,用來評 估我們的自動量測柯布角的正確率。
2. 一份同一病人的雙平面 X 光片(正面與側面 X 光影像),並以電腦斷層掃描作為三維模型 的正確答案。
3.2. 脊椎節定位結果:
在重建脊椎三維模型之前,我們需要先找出每一節脊椎節,利用第二章所述的方法搜 尋脊椎節,其結果如圖 15、16。
圖 15:脊椎節定位結果
圖 16:脊椎節定位結果
3.3. 脊椎側彎程度評估:
脊椎側彎程度評估是主要是以正面 X 光片中脊椎側彎的最大角度變化為主。在這裡我 們使用第一份實驗數據集中的影像來做評估,其結果如表 1 所示。其中 GT 為正確答案(醫 師量測角度的結果),TC 為使用傳統卡布角量測方法,VCM 為使用脊椎節中心連線的估測 方法,CF 為我們提出的曲線擬合方法。實驗結果顯示,我們提出來的方法與傳統的方法有 較小的平均誤和變異數。
表 1:使用不同的角度估算方法結果
3.4. 脊椎三維模型重建:
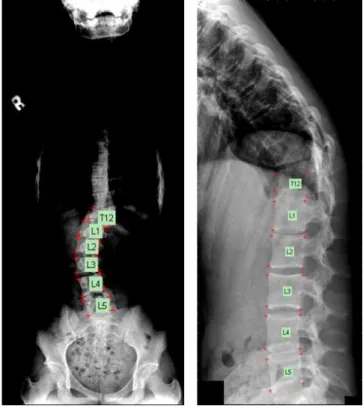
在這個實驗中,我們使用第二份實驗數據集,包含了同一個病人的雙平面 X 光影像(正 面 X 光影像(3520*4280)和側面 X 光影像(1092*2668))。我們分別從影像中定位其脊椎節,
結果如圖 16 所示。
我們可以發現側面 X 光影像(圖 16(右))是以腰椎為主要的拍攝對象且不包含髖臼,而 正面 X 光影像中(圖 16(左))則是以全脊柱為拍攝對象。對於我們定義三維世界座標是十分 困難的。此外,由於側面 X 光影像中沒有拍攝到髖臼或薦椎,也會導致我們無法正確定義 所偵測到的脊椎節是屬於哪一節脊椎,只能利用人工的方式標記,如此一來我們才能夠對 正面與側面的脊椎節來推論脊椎參數化模型。
雖然,我們不能從這組實驗數據集中自動地重建脊椎三維模型。但是,我們仍然可以
從有限的資訊中,推估出一些有用的脊椎三維模型的參數,如:以定位出來的脊椎節位置 求出脊椎節的長、寬、高,以此來決定三維圓柱體模型的大小,以及兩兩圓柱體模型之間 的夾角,如圖 17 所示。我們必須使用手動的方式對同一脊椎節的參數化模型作校正。
圖 17:脊椎參數化模型(L4 –5)
最後,我們列舉重建脊椎三維模型需要解決的問題:
1. X 光攝影(病人拍攝的姿勢是否固定、拍攝目標是否一致)
2. 三維世界座標中心的參考點 3. 脊椎節定位精準度
4. 自動化標記脊椎節 5. 偵測病變脊椎節
針對上述問題,我們提出了一些想法:脊椎三維模型重建先以腰椎部分為主要的實驗 對象,腰椎比起頸椎、胸椎擁有較高的不變性,所以受到姿勢改變影響較小(側面 X 光影像 拍攝方式,受拍者舉起雙手避免遮蔽胸腔部分) ,而且腰部 X 光影像的雜訊較少(沒有肋 骨、心臟的影響),可以有更高的定位精準度。當定位出髖臼的位置後,便能自動地標記出 每一節脊椎節。在圖 17、18 中,紅色箭頭指的部分是病變的脊椎節,要偵測並定位出該脊 椎節可以改變模板形狀或是其他不同的方法,如主動外觀模型(Active Appearance Model, AAM)來偵測病變的脊椎節。
圖 18:脊椎三維模型(電腦斷層掃瞄)
四 四 四
四、 、 、 、結論與未來方向 結論與未來方向 結論與未來方向 結論與未來方向
評估脊椎側彎的程度,傳統的方法:使用卡布角量測方法或脊椎中心連線的估算 方法需要定位出正確的上下端椎板,且這兩個方法對於椎板定位錯誤十分敏感。本研 究提出了脊椎側彎曲線量測的方法,能夠自動地擬合脊椎曲線。使用脊椎曲線上曲率 最大的特性來評估脊椎側彎程度。實驗結果顯示所提出的方法比起傳統的方法有較小 的平均誤和變異。雖然,無法完全自動地從雙平面 X 光影像中重建出脊椎三維模型,
但是我們仍然可以從雙平面 X 光影像中擷取出一些資訊。
我們未來的研究方向包括發展更強健的脊椎節定位演算法,並提高脊椎側彎曲線 量測的正確率,以及對腰椎部分做三維模型重建。
五 五 五
五、 、 、參考文獻 、 參考文獻 參考文獻 參考文獻
[1]. 賴伯亮,吳怡樂,唐政元,何瑁鎧,王文宏,洪偉智,李浚瑋,“自動測量柯布角,”2009 National Computer Symposium (NCS 2009), Taipei, Taiwan, 2009.
[2]. 「 電 腦 斷 層 檢 查 致 癌 率 升 高 」 , 中 時 電 子 報 , 2009-12-16 , 取 自 :
http://life.chinatimes.com/2009Cti/Channel/Life/life-article/0,5047,100302+112009121600068,00.html
[3]. Ahmad Farshoukh, Adel Fakih, “3D Reconstruction of Scoliotic Spines from 2D Plain Radiographs,” 3rd FEASC, 2004.
[4]. Andre B, Dansereau J, Labelle H, “Optimized vertical stereo base radiographic setup for the clinical three-dimensional reconstruction of the human spine,” J Biomech 27(8):1023–35, 1994.
[5]. Aubin CE, Dansereau J, Parent F, Labelle H, de Guise JA, “Morphometric evaluations of personalised 3D reconstructions and geometric models of the human spine,” Med Biol Eng Comput 35(6):611–8, 1997.
[6]. Aubin CE, Dansereau J, Petit Y, Parent F, de Guise JA, Labelle H, “Threedimensional measurement of wedged scoliotic vertebrae and intervertebral disks,” Eur Spine J 7(1):59–65, 1998.
[7]. B. Verdonck, R. Nijlunsing, F.A. Gerritsen, J. Cheung, D.J. Wever, A. Veldhuizen, S. Devillers, S. Makram-Eveid, “Computer Assisted Quantitative Analysis of Deformities of the Human Spine,” Proceedings of Medical Image Computing and Computer Assisted Intervention, 1998.
[8]. Benameur S, Mignotte M, Parent S, Labelle H, Skalli W, de Guise J, “3D/2Dregistration and segmentation of scoliotic vertebrae using statistical models,” Comput Med Imaging Graph 27(5):321–37, 2003.
[9]. Dansereau J, Stokes IA, “Measurements of the three-dimensional shape of the rib cage,” J Biomech 21(11):893–901,1988.
[10]. Delorme S, Petit Y, de Guise JA, Labelle H, Aubin CE, Dansereau J, “Assessment of the 3-D reconstruction and high-resolution geometrical modeling of the human skeletal trunk from 2-D radiographic images,” IEEE Trans Biomed Eng 50(8):989–98, 2003.
[11]. Dumas R, Blanchard B, Carlier R, de Loubresse CG, Le Huec JC, Marty C, et al, “A semi-automated method using interpolation and optimisation for the 3D reconstruction of the spine from bi-planar radiography: a precision and accuracy study,” Med Biol Eng Comput 46(1):85–92, 2008.
[12]. Facanha-Filho F, Winter RB, Lonstein JE, Koop S, Novacheck T, L’Heureux EA Jr, Noren CA, “Measurement accuracy in congenital scoliosis,” The Journal of Bone and Joint Surgery 83-A(1):42-45, 2001.
[13]. Fleute M, “Shape reconstruction for computer assisted surgery based on nonrigid registration of statistical models with intra-operative point data and X-ray images,” PhD Thesis, Universite Joseph Fourrier, Grenoble, France, 2001.
[14]. Kamimura M, Ebara S, Itoh H, Tateiwa Y, Kinoshita T, Takaoka K, “Accurate pedicle screwinsertion under the control of acomputer-assisted image guiding system: laboratory test and clinical study,” J Orthop Sci 4(3):197–206, 1999.
[15]. Kuklo TR, Potter BK, Schroeder TM, O’brien MF, “Comparison of manual and digital measurement in adolescent idiopathic scoliosis,”
Spine 31(11):1240-1246, 2006.
[16]. Labelle H, Dansereau J, Bellefleur C, Jequier JC, “Variability of geometric measurements from three-dimensional reconstructions of scoliotic spines and rib cages,” Eur Spine J 4(2):88–94, 1995.
[17]. Labelle H, de Guise J, Aubert B, Godbout B, Skalli W, “3D resconstruction of the spine from biplanar X-rays using parametric models based on transversal and longitudinal inferences,” Medical Engineering & Physics 31:681-687, 2009.
[18]. Mitton D, Landry C, Veron S, SkalliW, Lavaste F, De Guise JA, “3D reconstruction method from biplanar radiography using non-stereocorresponding points and elastic deformable meshes,” Med Biol Eng Comput 38(2):133–9, 2000.
[19]. Mitulescu A, Skalli W, Mitton D, De Guise JA, “Three-dimensional surface rendering reconstruction of scoliotic vertebrae using a non stereo-corresponding points technique,” Eur Spine J 11(4):344–52, 2002.
[20]. Nakajima A, Kawakami N, Imagama S, Tsuji T, Goto M, Ohara T, “Threedimensional analysis of formation failure in congenital scoliosis,”
Spine 2007;32(5):562–7.
[21]. Olivier Gille, Nicolas Champain, Abdelkrim Benchikh-El-Fegoun, Jean-Marc Vital, Wafa Skalli, “Reliability of 3D reconstruction of the spine of mild scoliotic patients,” Spine 2007;32(5):568-573, 2007.
[22]. P.-L. Lai, C.-Y. Tang, Y.-L. Wu, W.-C. Hung, J.-W. Li, “Development of Algorithm and Software for Automated Scoliotic Curve Measurement,” International Forum on Medical Imaging in Asia (IFMIA) 2009 (A joint conference with The IEICE Information and Systems Society, Technical Committee on Medical Imaging), Taipei, Taiwan, 2009.
[23]. Pomero V, Mitton D, Laporte S, de Guise JA, Skalli W, “Fast accurate stereoradiographic 3D-reconstruction of the spine using a combined geometric and statistic model,” Clin Biomech 19(3):240–7, Bristol, Avon, 2004.
[24]. Veron S, “Modelisation geometrique et mecanique tridimensionnelle par elements finis du rachis cervical superieur. These de doctorat en mecanique,” ENSAM, Paris, France; 1997.
國科會補助計畫衍生研發成果推廣資料表
日期:2011/11/29
國科會補助計畫
計畫名稱: 使用脊柱二維X光影像及三維模型重建以輔助脊椎側彎之臨床分析 計畫主持人: 吳怡樂
計畫編號: 99-2221-E-011-124- 學門領域: 圖形辨識
無研發成果推廣資料
99 年度專題研究計畫研究成果彙整表
計畫主持人:吳怡樂 計畫編號:99-2221-E-011-124-
計畫名稱:使用脊柱二維 X 光影像及三維模型重建以輔助脊椎側彎之臨床分析 量化
成果項目 實際已達成
數(被接受 或已發表)
預期總達成 數(含實際已
達成數)
本計畫實 際貢獻百
分比
單位
備 註 ( 質 化 說 明:如 數 個 計 畫 共 同 成 果、成 果 列 為 該 期 刊 之 封 面 故 事 ...
等)
期刊論文 0 1 50%
研究報告/技術報告 0 0 100%
研討會論文 3 3 80%
論文著作 篇
專書 0 0 100%
申請中件數 0 0 100%
專利 已獲得件數 0 0 100% 件
件數 0 0 100% 件
技術移轉
權利金 0 0 100% 千元
碩士生 2 2 100%
博士生 1 1 100%
博士後研究員 0 0 100%
國內
參與計畫人力
(本國籍)
專任助理 0 0 100%
人次
期刊論文 0 0 100%
研究報告/技術報告 0 0 100%
研討會論文 0 0 100%
論文著作 篇
專書 0 0 100% 章/本 申請中件數 0 0 100%
專利 已獲得件數 0 0 100% 件
件數 0 0 100% 件
技術移轉
權利金 0 0 100% 千元
碩士生 0 0 100%
博士生 0 0 100%
博士後研究員 0 0 100%
國外
參與計畫人力
(外國籍)
專任助理 0 0 100%
人次
其他成果
(
無法以量化表達之成 果如辦理學術活動、獲 得獎項、重要國際合 作、研究成果國際影響 力及其他協助產業技 術發展之具體效益事 項等,請以文字敘述填 列。)n/a
成果項目 量化 名稱或內容性質簡述
測驗工具(含質性與量性) 0
課程/模組 0
電腦及網路系統或工具 0
教材 0
舉辦之活動/競賽 0
研討會/工作坊 0
電子報、網站 0
科 教 處 計 畫 加 填 項
目 計畫成果推廣之參與(閱聽)人數 0
國科會補助專題研究計畫成果報告自評表
請就研究內容與原計畫相符程度、達成預期目標情況、研究成果之學術或應用價 值(簡要敘述成果所代表之意義、價值、影響或進一步發展之可能性) 、是否適 合在學術期刊發表或申請專利、主要發現或其他有關價值等,作一綜合評估。
1. 請就研究內容與原計畫相符程度、達成預期目標情況作一綜合評估
■達成目標
□未達成目標(請說明,以 100 字為限)
□實驗失敗
□因故實驗中斷
□其他原因 說明:
2. 研究成果在學術期刊發表或申請專利等情形:
論文:■已發表 □未發表之文稿 □撰寫中 □無 專利:□已獲得 □申請中 ■無
技轉:□已技轉 ■洽談中 □無 其他:(以 100 字為限)
3. 請依學術成就、技術創新、社會影響等方面,評估研究成果之學術或應用價 值(簡要敘述成果所代表之意義、價值、影響或進一步發展之可能性)(以 500 字為限)
評估脊椎側彎的程度,傳統的方法:使用卡布角量測方法或脊椎中心連線的估算方法需要 定位出正確的上下端椎板,且這兩個方法對於椎板定位錯誤十分敏感。本研究提出了脊椎 側彎曲線量測的方法,能夠自動地擬合脊椎曲線。使用脊椎曲線上曲率最大的特性來評估 脊椎側彎程度。實驗結果顯示所提出的方法比起傳統的方法有較小的平均誤和變異。雖 然,無法完全自動地從雙平面 X 光影像中重建出脊椎三維模型,但是我們仍然可以從雙平 面 X 光影像中自動地擷取出一些資訊。