I-Shou University Institutional Repository:Item 987654321/11337
99
0
0
全文
(2)
(3) 摘要 本篇論文旨在探討三節車廂拖車的倒車行駛路徑的控制,控制的目的 是將車子倒車至直線的位置。因為倒車控制本身是不穩性的系統,所以無 法得到足夠的輸入、輸出資料做系統鑑別。 因此本文在倒車系統的回授部分使用平行分散補償的方法,將其穩定後由 電腦模擬產生足夠的輸入、輸出資料,再用粒子群聚最佳化鑑別出 T-S 模 型。最後利用線性矩陣不等式求出正定矩陣 P 及保證系統穩定的狀態回授増 益值 F 。. 關鍵詞:倒車控制,平行分散補償,粒子群聚最佳化,T-S 模糊模式,線性 矩陣不等式。. I.
(4) ABSTRACT This paper deals with backward movement control for a vehicle with triple trailers. The control objective is to back the vehicle into a straight-line configuration. Since the backing-up control system is unstable, so we can not get adequate input and output data form the system for identification. Hence, this paper in the feedback part of the backing-up system using parallel distributed compensation method. Once adequate input and output data are obtained form the stabilized system. Then we identify the T-S model by the PSO algorithms. Moreover, we obtain the positive definite matrix P and the gain F stabilizing system by LMI.. Keywords: Backing-up Control, Parallel Distributed Compensation, PSO Algorithms, T-S fuzzy model, Linear Matrix Inequality.. II.
(5) 誌謝 首先要感謝兩位口試委員 謝哲光老師與 孫允平老師對本論文提出寶 貴的意見,使本論文的內容更加完善。 再來要感謝 洪惠陽老師與 凌衍雷老師這兩年來的指導,除了在學業 與論文研究上給予協助外,學習研究的態度與做人處事方式更是令學生受 益良多,在此獻上由衷的敬意與感謝。 其次要感謝同窗好友子瑋、彥翔、皓緯、恆志,因為有他們,在這兩 年的研究所生活不再只有苦悶的研究,更多了快樂與歡笑。 最後要由衷的感謝伯丞學弟,感謝他每天不辭辛勞的幫我買飯,提供 了我繼續做研究的原動力。. III.
(6) 目 錄 封面 審定書 中文摘要…………………………………………………………................ Ⅰ. 英文摘要…………………………………………………………................ Ⅱ. 誌謝……………………………………………………………………….... Ⅲ. 目錄……………………………………………………………………….... Ⅳ. 圖表引索………………………………………………………………….... Ⅷ. 第一章. 序論.………….………………..……………………….............. 1. 1.1. 前言………..………………………………………………….... 1. 1.2. 文獻回顧..…………………………………………………….... 1. 1.3. 研究動機與論文架構.………………………………….............. 3. 1.3.1 研究動機……………………………………………….... 3. 1.3.2 論文架構………………...………………………………. 3. 第二章. 粒子群聚最佳化……………………………………….............. 5. 2.1. 演算法介紹…………………………………………….............. 5. 2.1.1. 演算法特性…….………………………………………... 6. 2.1.2. 速度更新公式….………………………………………... 6. 演算法流程……...……………………………………………... 7. 2.2. IV.
(7) 演算法流程示意..……………………………….............. 9. 第三章. 模糊控制理論..….……………………………………………... 11. 3.1. 模糊控制架構………………………………………….............. 11. 3.1.1 模糊集合的定義..……………………………….............. 13. 歸屬函數………..……………………………….............. 14. 模糊推論基本架構…………………………………….............. 16. 3.2.1 模糊化介面……..……………………………….............. 17. 3.2.2. 模糊規則庫……..……………………………….............. 17. 3.2.3. 模糊推論……..………………………………….............. 18. 3.2.4. 解模糊化……..………………………………….............. 19. 第四章. 倒車控制系統..….……………………………………………... 22. 4.1. 系統數學模型建立…………………………………….............. 22. 4.2. T-S 模糊模式……………………………………........................ 25. 第五章. 平行分散補償設計...…………………………………………... 28. 5.1. 控制器設計…………………………………………….............. 29. 5.1.1. 模糊系統建立……..…………………………….............. 29. 5.1.2. 平行分散補償法……..………………………….............. 31. LMI 控制器設計………………………….…………….............. 32. LMI 的條件限制……..………………………….............. 32. 2.2.1. 3.1.2 3.2. 5.2. 5.2.1. V.
(8) LMI 模糊控制系統模擬分析…..……………….............. 38. PSO 演算法控制器設計………………………………............... 42. 5.3.1. PSO 演算法之於 PDC 設計……..………………………. 42. 5.3.2. PSO 模糊系統模擬分析……..………………….............. 44. 5.4. 模擬結果比較…………………………………………............... 47. 第六章. 系統鑑別………………………………...……………………... 51. 6.1. 模糊鑑別理論…………………………………………............... 52. 6.1.1. 系統鑑別概要……..…………………………….............. 53. 6.1.2. 模糊鑑別器的架構……..……………………….............. 54. T-S模型的模糊系統鑑別………………………………………. 55. 6.2.1. 前件部結構的鑑別……..……………………….............. 56. 6.2.2. 前件部參數的鑑別……..……………………….............. 58. 6.2.3. 後件部參數的鑑別……..……………………….............. 59. 6.3. 模糊模型之推論方法………………………………..…………. 60. 6.4. 非線性倒車系統鑑別………………………………..…………. 62. 6.4.1. T-S模糊模型建立……..………………..……….............. 62. 6.4.2. PSO演算法之系統鑑別……..………………..……….... 63. 6.4.2.1. 鑑別結果……..………………..………………... 64. 6.4.2.2. 誤差比較……..………………..………………... 66. 5.2.2 5.3. 6.2. VI.
(9) 第七章. LMI控制器設計………………………………...……………... 69. 7.1. LMI設計……………………………………………..…………. 69. 7.2. 模擬結果分析…………………………………………………... 70. 第八章. 結論與未來的研究方向…………………………...…………... 74. 8.1. 結論…………………………………………………..…………. 74. 8.2. 未來的研究方向………………………………………............... 75. 參考文獻…………………………..…………………………...…………... 76. 附錄程式…………………………..…………………………...…………... 79. VII.
(10) 圖 表 索 引 圖 2-1. PSO 演化流程圖…………...…………………………………….. 8. 圖 2-2. 搜尋過程-最初狀態.…………………………………………... 9. 圖 2-3. 搜尋過程-經過 10 代.………………….………………………. 9. 圖 2-4. 搜尋過程-經過 50 代…..………………………………………. 10. 圖 2-5. 搜尋過程-經過 500 代………………......................................... 10. 圖 3-1. 以 T-S 模糊模型為基底之控制器設計流程圖……….…………. 11. 圖 3-2. 三種常用型態的歸屬函數及表示法………...………................. 15. 圖 3-3. 模糊推論系統架構圖………………………………………….... 16. 圖 3-4. Mamdani 的 Min.-Max.的推論法…..……………………………. 18. 圖 3-5~3-8. 解模糊化法…………………………………………………. 21. 圖 4-1. 三節車廂拖車模型……………………...………………………. 22. 圖 5-1. MATLAB/SIMULINK 倒車系統模擬圖…...………………….... 28. 圖 5-2. 倒車系統 LMI 模糊控制器模擬圖……..……………………….. 39. 圖 5-3. x1 的輸出響應圖(LMI)…………………….……………………. 39. 圖 5-4. x3 的輸出響應圖(LMI)…...……………………………………... 40. 圖 5-5. x5 的輸出響應圖(LMI)………….………………………………. 40. 圖 5-6. x6 的輸出響應圖(LMI)……………….…………………………. 41. 圖 5-7. x7 的輸出響應圖(LMI)………………………………...………... 41. VIII.
(11) 圖 5-8. 倒車系統 PSO 模糊控制器模擬圖…………………………….... 42. 圖 5-9. PDC 模糊規則方塊圖……………………….……………………. 43. 圖 5-10. x1 的輸出響應圖(PSO)………...………………………………. 44. 圖 5-11. x3 的輸出響應圖(PSO)……………………...…………………. 45. 圖 5-12. x5 的輸出響應圖(PSO)……………………………………….... 45. 圖 5-13. x6 的輸出響應圖(PSO)……………….……………..…………. 46. 圖 5-14. x7 的輸出響應圖(PSO)…..……………………….……………. 46. 圖 5-15. x1 輸出響應比較圖…………………………………….............. 47. 圖 5-16. x3 輸出響應比較圖…………………………………….............. 48. 圖 5-17. x5 輸出響應比較圖…………………………………….............. 48. 圖 5-18. x6 輸出響應比較圖……………...……………………............... 49. 圖 5-19. x7 輸出響應比較圖…………………………………….............. 49. 圖 6-1. 並聯鑑別模糊架構……………………………………................ 54. 圖 6-2. 串並聯鑑別模糊架構………………………………………….... 55. 圖 6-3. T-S 模型模糊鑑別流程圖……………………………….............. 56. 圖 6-4. 前件部結構的鑑別示意圖…………………………………….... 57. 圖 6-5. 前件部模糊集合與前件部參數……………………………….... 59. 圖 6-6. 倒車系統的模擬圖…………………………………………….... 62. 圖 6-7. 三條模糊規則範圍表示圖…………………………………….... 63. IX.
(12) 圖 6-8. 1000 代 PSO 演化曲線圖……………………………………….... 64. 圖 6-9. 5000 代 PSO 演化曲線圖…………………………...……………. 65. 圖 6-10. 10000 代 PSO 演化曲線圖…………………………………….... 65. 圖 6-11. x1 誤差比較圖………………………………………….............. 66. 圖 6-12. x3 誤差比較圖………………………………………….............. 67. 圖 6-13. x5 誤差比較圖………………………………………….............. 67. 圖 6-14. x6 誤差比較圖………………………………………….............. 68. 圖 6-15. x7 誤差比較圖………………………………………….............. 68. 圖 7-1. T-S 模糊模型系統模擬圖……………………………….............. 70. 圖 7-2. x1 輸出響應圖(鑑別)……………………………………………. 70. 圖 7-3. x3 輸出響應圖(鑑別)……………………………………………. 71. 圖 7-4. x5 輸出響應圖(鑑別)……………………………………………. 71. 圖 7-5. x6 輸出響應圖(鑑別)(1)…………………………………………. 72. 圖 7-6. x6 輸出響應圖(鑑別)(2)…………………………………………. 72. 圖 7-7. x7 輸出響應圖(鑑別)……………………………………………. 73. 表 4-1. 模擬車身選用的系統參數…………………………………….... 24. X.
(13) 第一章 緒論 1.1 前言 自動駕駛控制可定義為設計一控制系統並藉由影像裝置或其他感測技 術以及駕駛致動裝置(Steering Actuator)使得車輛可自行隨著參考路徑行 駛,並不需要人眼根據目視測得車輛在道路上的相對位置來輸入車輛所需 的轉向角,因此稱之為全自動駕駛控制。本文針對三節車廂車輛倒車行駛 路徑的研究方法為一個非線性的問題[1],故以模糊邏輯控制器設計方法是 為不錯的選擇。 本論文是以Takagi和Sugeno兩位學者在1985年所提出的T-S模糊模型 (T-S fuzzy model)[2]及模糊邏輯控制理論(Fuzzy Logic Control theory)[3],[4] 為基礎。先針對非線性的倒車系統,利用平行分散補償法[5]使其穩定藉以 取得足夠的輸入與輸出資料[6],再利用PSO演算法鑑別出T-S模糊模型[7], 最後使用線性矩陣不等式(LMI)的方法來找出正定矩陣 P 及保證系統穩定的 狀態回授増益值 F [8]。. 1.2 文獻回顧 1965 年,美國加州大學柏克萊分校,扎德 (L.A. Zadeh) 教授首先發表 了「模糊集合論(Fuzzy Sets)」 ,並且指出在現實中絕大多數的事物是無法以 明確的二分邏輯法加以判斷的。因此,L.A. Zadeh 教授提倡模糊理論,嘗試. 1.
(14) 以人類的思維方式去簡化問題的複雜度,而且能達到與傳統控制方法相同 的目的。 文獻[9]是以 Takagi-Sugeno 模糊模型表示一個非線性的動態模式,應用 在一個單節車廂車輛的倒車行駛控制。Model-based 模糊控制的方法是從 T-S 模糊模型的觀點應用平行分散補償(PDC)的概念去設計控制器。PDC 主要是 藉由李亞普諾夫不等式設計穩定控制器,這個方法是利用線性矩陣不等式 的穩定的條件,去找到一個共同的正定矩陣 P ,來滿足李亞普諾夫方程式 (Lyapunov function) 。文獻[10]探討多節車廂車輛的倒車行駛控制,而多節 車廂的問題比單節車廂的倒車更困難去達到穩定的控制。 1985 年 Takagi 和 Sugeno 兩位學者依受控體實際輸入輸出資料,運用 模糊關係和模糊推論的方法建立一個片斷式線性多模型,簡稱 T-S 模型 [11]。在這個方法中,非線性的系統或受控體模型將被轉換在模糊輸入空間 的線性子系統做鑑別,受控體的數學模型被區分為結構鑑別和參數鑑別二 部份,而最小平方的估計算法常被用來對此線性多模型參數作指標衡量的 工具。 粒 子 群 演 算 法 (Particle Swarm Optimization, PSO)為 Kennedy 與 Eberhart 於 1995 年所提出[12]、[13],為受到鳥群的覓食行為所啟發。每 個粒子經過特別的傳遞訊息方式,將所得到的資訊提供給群體並做交流, 藉此搜尋到最佳解。. 2.
(15) 1.3 研究動機及論文架構 1.3.1 研究動機 PSO 演算法是近幾年熱門的最佳化搜尋方法,因此本文是以 Takagi 和 Sugeno 兩位學者在 1985 年所提出的 T-S 模糊模型及模糊邏輯控制理論,針 對一個非線性的倒車控制系統的輸入與輸出資料,利用 PSO 演算法之系統 鑑別去調整鑑別出的 T-S 模型之規則的參數,使得輸出的誤差最小化。之 後以線性矩陣不等式的方法來找出正定矩陣 P 和保証系統穩定的狀態回授 增益值 F 。. 1.3.2 論文架構 本論文為研究三節車廂的車輛在倒車行駛路徑的控制系統,主要控制 目的是依參考的行駛路徑,將車輛倒車行駛進入到直線位置。本論文是依 據 T-S 模糊模型對倒車系統做系統鑑別再應用線性矩陣不等式的條件,設 計穩定的模糊控制器。本論文架構說明如下: 第二章『粒子群聚最佳化』:介紹粒子群聚最佳化的特性與演化流程。 第三章『模糊控制理論』:介紹模糊理論之架構與功能。 第四章『倒車控制系統』:利用車輛與車廂之間的角度與位移,推導出 車輛倒車行駛的數學運動方程式。 第五章『平行分散補償設計』:利用平形分散補償法(PDC)設計穩定的. 3.
(16) 模糊控制器。 第六 章『系統鑑別』 :取得倒車系統的輸入輸出資料後,利用 PSO 演算 法做系統鑑別。 第七章『LMI 控制器設計』:將鑑別出來的系統模型,利用線性矩陣不 等式設計穩定的模糊控制器。 第八章『結論與未來研究方向』 :對本論文的研究成果作總結,並提出 本論文未來可進行研究的方向。. 4.
(17) 第二章 粒子群聚最佳化 粒子群聚最佳化(Particle Swarm Optimization) 簡稱 PSO,為 Kennedy 與 Eberhart 於 1995 年所提出,為受到鳥群的覓食行為所啟發。PSO 的概 念源自於群體行為理論,每一個體經過特別的傳遞訊息方式,將所得到的 資訊提供給群體並做交流,使整個團體朝同一方向而去,藉此搜尋到食物。 一群鳥再隨機搜尋食物。這個區域裡只有一塊食物。所有的鳥 都不知道食物再哪裡,但他們知道目前距離食物還有多遠,那麼找到食物 的最佳策略是什麼?最簡單的方法就是找尋距離食物最近的鳥之周圍區域 及根據自己本身飛行的經驗判斷食物的所在。. 2.1 演算法介紹 粒子群聚最佳化與基因演算法類似,為一種基於迭代演算的最佳化搜 尋工具,屬於演化式計算與隨機搜尋法中的一種。PSO 演算法初始化為一群 隨機粒子(隨機解),然後通過迭代找到群體最佳解。在每一次演化迭代中, 粒子透過兩個最佳值-個體最佳值( pid )與群體最佳值( pgd )來更新自己。. 5.
(18) 2.1.1 演算法特性 .每個問題解都想像成一隻鳥,稱為“Particle”。 .每個 Particle 都有一個 fitness function 判斷目前位置的好壞。 .每一個 Particle 能記得所搜尋到最佳位置。 .每一個 Particle 還有一個速度以決定飛行的距離與方向。. 2.1.2 速度更新公式 在 PSO 演化的程序中每個粒子都有一個速度以決定移動的距離與方 向,而每個粒子都能判斷目前位置的好壞,並且能記得所搜尋到的最佳位 置,經過特別的傳遞訊息方式,將所得到的資訊提供給群體並做交流,藉 此搜尋到最佳解。速度的更新公式如下:. xid=' xid + Vid. (2-1). Vid = W × Vid + c1 × Rand () × ( pid − xid ) + c2 × Rand () × ( pgd − xid ) (2-2) 其中. Vid :每一 Particle 在第 d 維之速度 i:Particle 之編號 、 d:維度 W :Inertia Weight 6.
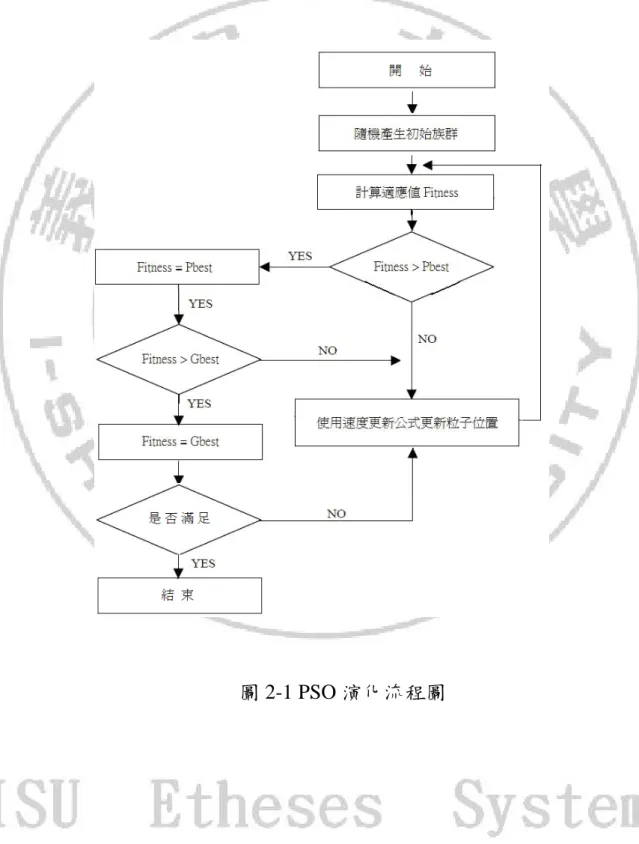
(19) c1 、 c2 :學習常數 Rand( ):一介於 0 至 1 的亂數. pid :每一 Particle 到目前為止,所求得的最佳解 pgd :所有 Particle 到目前為止,所求得的最佳解. xid :每一 Particle 目前之所在. 2.2 演算法流程 1. Initial: 將群族初始化,以隨機的方式求出每一 Particle 之初始位置與速度。 2. Evaluation: 依據 fitness function 計算出 fitness value 以作為判斷每 Particle 之好壞。 3. Fine the Pbest: 找出每一 Particle 到目前為止的搜尋過程中最佳解,這個最佳解我們將 之稱為 Pbest。 4. Fine the Gbest: 找出所有 Particle 到目前為止所搜尋到的整體最佳解,此最佳解我們稱 之為 Gbest。 7.
(20) 5. Update the Velocity: 依據(2-1)、(2-2)更新每一個 Particle 之速度與位置。回到步驟 2. 繼續 執行,直到獲得一個令人滿意的結果或符合終止條件為止。. 圖 2-1 PSO 演化流程圖. 8.
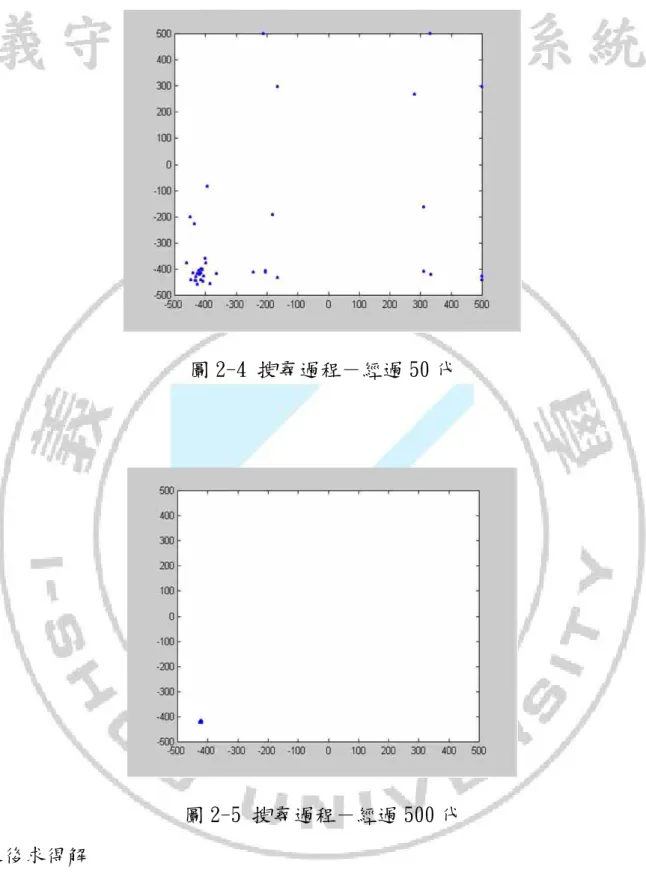
(21) 2.2.1 演算法流程示意 我們找一個實際問題,利用 PSO 演算法來搜尋問題的最佳解,並顯示 出演算過程來是示意 PSO 演算法的過程。. f ( x) =. n. ∑ (− x ) ⋅ sin( i =1. i. xi ). where − 500 ≤ xi ≤ 500 求最小值 f ( x) 最小值. 圖 2-2 搜尋過程-最初狀態. 圖 2-3 搜尋過程-經過 10 代. 9.
(22) 圖 2-4 搜尋過程-經過 50 代. 圖 2-5 搜尋過程-經過 500 代 最後求得解. global minimum f ( x)=n ⋅ 418.9829; xi = − 420.9687, i=1:n. 10.
(23) 第三章 模糊控制理論 3.1 模糊控制架構 模糊控制器的設計流程,如圖 3-1 所示。針對一個非線性系統而言,我 們可以透過數學模型,再利用 T-S 模糊模式完成控制器的設計;若無法取 得正確的數學方程式,則利用輸入輸出資料的系統鑑別方法,先求得 T-S 模糊模式再設計出受控系統所需要的控制器。. 非線性系統. 輸入輸出資料之 系統鑑別. 實體模式-系統 動態數學模型. T-S 模糊模式. 模糊控制器 圖3-1 以T-S模糊模型為基底之控制器設計流程圖. 11.
(24) 設計流程圖之基本架構,主要有下列四個部分[14],各方塊圖功能說明 如下: (一) 非線性系統: 控制器的設計需確定受控系統的數學模式,如果受控系統是線性統, 已有很多良好的設計方法[15],而實際上受控系統經常是非線性的,且到目 前為止並沒有很完善的控制器設計方法。 (二) 系統模型建立: 透過合理的假設,將實際的非線性系統,視為一組物理模型,進而以 數學方式來描述其過程稱為建模,糢糊模式建構方式分為兩種: (1) 數學動態方程式: 以物理定理配合數學理論,推導出數學動態方程式, 建立系統 T-S 模型。 (2) 系統鑑別: 僅須考慮系統的輸入-輸出資料與數據,對系統進行鑑別,以 達到模型建立的目的。 (三) 模糊模式(T-S 模糊模式): 利用模糊邏輯和模糊規則,加以模糊化後並描述系統之行為。此推論 模式的方法將在 3.2 章節加以詳細說明。 (四) 模糊控制器: 設計模糊控制器,以並列分散補償方式,使系統成為區域線性化,利 用LMI求出回授增益值以達到系統設計所需之目標。 12.
(25) 3.1.1 模糊集合的定義 所謂的模糊集合(Fuzzy sets),是用來表示界限和邊界不明確的模糊概念 的集合,要表達模糊概念則無法再倚靠傳統明確的二值集合理論。元素和 集合之間,不再是 傳統明確集合的非0即1之關係,而是依其相似程度,給 予不同的歸屬函數值。因此,我們定義宇集合(universal set)的一個模糊集合 A 為:. A = {x, µ A ( x) x ∈U }. (3-1). 其中 µ A 是模糊集合 A 的歸屬函數, µ A (x) 為特徵函數介於0與1之間,也 就是說, x 對模糊集合 A 之歸屬程度有輕重大小之分。而此集合 A 即為一個 不明確的隸屬關係,稱為模糊集合。. 13.
(26) 3.1.2 歸屬函數 在定義了模糊集合之後,我們也知道模糊集合的性質可以利用歸屬函 數來描述。歸屬函數是模糊集合理論中最基本的概念,原則上模糊控制應 用範疇內的歸屬函數都要具備有「凸(convex)」及「正規(normal)」等基本 性質。. 歸屬函數的功能即是為了將明確數值語意化(模糊化)。模糊控制的 輸入訊號與輸出訊號都為明確值,然而模糊推理機構是採用語言 變數而非數值變數來描述系統的特性。因此在設計輸入、輸出變數的同時 也必須考量其歸屬函數的設計。設計歸屬函數時需同時考慮每個語意變數 的範圍、歸屬函數的形式以及狀態空間的分割方式,以便把每個輸入、輸 出變數的語意變量存放於這些歸屬函數資料內。. 歸屬函數大致上可分成連續式與離散式。離散式歸屬函數的特點是簡 單明瞭,相對容易建立出模糊關係矩陣,而且可以節省記憶空間及函數換 算的時間。但是空間取樣以及系統資料的完整性、精確性等因素往往會造 成影響。因上述原因在模糊控制系統中,設計者通常會採用連續式的歸屬 函數。因為連續式歸屬函數能夠用單一個歸屬函數就可代表一個輸出、輸 入值的完整資料,這種方式可以避免採用離散式需要多點取樣片段資料的 困擾。. 14.
(27) 集合之歸屬函數,常見的有三角形歸屬函數、梯形歸屬函數、 高斯型 歸屬函數等,如圖3-2所示: 模糊集合描述方式. 歸屬函數表示法. …………………………………………………………………………….. 三角形. 梯形. 高斯. 圖 3-2 三種常用型態的歸屬函數及表示法. 15.
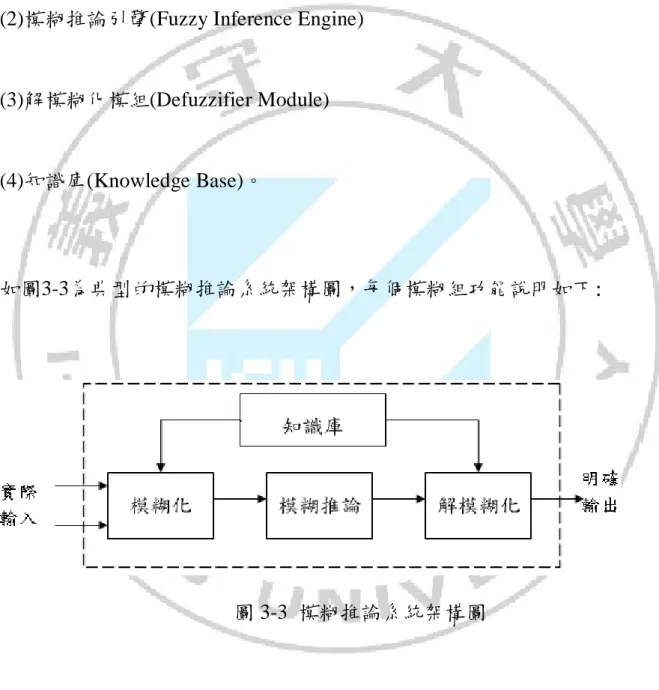
(28) 3.2 模糊推論基本架構 一般模糊推論系統的基本架構主要有下列四個部分: (1)模糊化模組(Fuzzifier Module). (2)模糊推論引擎(Fuzzy Inference Engine). (3)解模糊化模組(Defuzzifier Module). (4)知識庫(Knowledge Base)。. 如圖3-3為典型的模糊推論系統架構圖,每個模糊組功能說明如下:. 圖 3-3 模糊推論系統架構圖. 16.
(29) 3.2.1 模糊化介面 控制器的輸入通常是明確數值,然而模糊控制的知識庫是以語意形式 寫成,其推論過程中也是以語意的形式進行推論,因此為了方便模糊知識 庫以及模糊推理引擎的運作,模糊控制系統的輸入訊號必須經過模糊化的 處理。其過程乃主要是將實際數值透過轉換後,能以模糊集合的形態來描 述,且適用於模糊控制之規則庫中。. 3.2.2 模糊規則庫 模糊規則庫的控制規則是模糊控制器的核心,通常設計者將代表控制 規則的模糊條件語句,表示整個控制系統的思考法則,其中所設計的控制 規則,是以近似人類的思考模式,把受控體的各種可能的狀態,以 IF THEN 條列式的口語形式表示成模糊性的控制演算法則,設計的好壞影響到整個 控制效果。. 17.
(30) 3.2.3 模糊推論 模糊推論是將輸入模糊集合經由模糊規則庫,取得適當的模糊輸出集 合,以下將對比較常用的推論機構做一簡單的介紹: 曼得尼(Mamdani)的 Min-Min-Max 模糊推論法[16],如圖 3-4 所示。這 種推論法的輸入狀態對被觸動規則之輸入各命題的適合度是採用邏輯積 (min)演算,找到前提命題的適合度。規則結論的取得,是以此值與結論命 題的模糊集合用邏輯積演算。取得結論之後,接著就是要將所有觸動規則 結論做統合的工作,若每個規則是用“或”連接起來,則採用邏輯和(max) 的運算來完成。. 圖3-4 Mamdani的Min.-Max.的推論法. 18.
(31) 針對圖3-說明如下,首先對IF前件部各假設(X 1 is A 11 )的歸屬函數值取 其邏輯積(Min.)作為IF前件部的適合度,然後將此適合度與THEN後件部的 命題(Y is B 1 )作邏輯積(Min.)運算,作為每一規則的結論程度值。接著對整 個規則庫作邏輯和(Max.),所得即為整個模糊推論的結果。. 3.2.4 解模糊化 解模糊化與模糊化的作用相反,它是把一個模糊集合轉換到一個明確 值的動作,即是將模糊推論所得的模糊結果,轉化為一明確的輸出量。簡 單的說也就是找一個最適合代表模糊集合的點,以便對受控體進行控制。 常見的方法有重心法(Center of Area Defuzzification)、最大平均法(Mean of maxima Defuzzification) 及 中 心 平 均 值 解 模 糊 化 法 (Center Average Defuzzification)。常見的方法說明如下[17]:. (1)重心解模糊化法 這個方法是最常用,似乎也是最合理的,其公式如下:. y* =. ∫Y yB' ( y)dy. (3-2). ∫Y B' ( y)dy (3-2)式的分母即為 B' ( y ) 之面積,此公式所計算出來的值就是該面積的 重心在 Y 軸上之投影位置,如圖 3-5。若 B' ( y ) 為不規則的形狀,計算起來會 19.
(32) 更花時間,這是本方法的最大缺點。當 B ' ( y ) 是一個離散型模糊集合,(3-2) 式就要改為(3-3)式。 k. ∫ y B' ( y ) i. y = *. i. i =1 k. (3-3). ∫ B' ( y ) i. i =1. (2) 最大值之平均值 因為 B' ( y ) 往往是不規則形的,我們從左邊開始沿著 B' ( y ) 之向右攀 爬,當爬到第一個最高點時,此點在 Y 軸上之投影即為 y * 值,如圖 3-6。. y * = min{y ∈ Y B( y )= h(B)}∆ y * F y∈Y. =. (3-4). 其中 h(B) 叫做模糊集合 B' ( y ) 之高度。 當爬到最後一個最高點時,此點在Y軸上之投影即為 y * 值,如圖3-6。. y * = max{y ∈ Y B' ( y )= h(B' )}∆ y * L =. y∈Y. (3-5). 所謂的最大值之平均解模糊化法即為(3-4)式及(3-5)式之平均值,如圖 3-7。. y = *. y. * F. + y*L 2. (3-6). (3)中心平均值解模糊化法 此法或稱為高度解模糊化法(Height Defuzzification),特別針對的形狀為 正規(normal)且對稱的(Symmetry),是常用的解模糊化法之一。 20.
(33) m. ∫ q h' (B' ) l. y = *. l. l =1 m. (3-7). ∫ h' (B' ) l. l =1. 其中 h( B'l ) 表示每個 B'l 之高度。 ql 表示在未經砍頭或未經矮化前之最 中心點之 y 值,如圖 3-8。. 圖 3-5~3-8 解模糊化法. 21.
(34) 第四章 倒車控制系統 本論文旨在探討三節車廂的拖車倒車行駛的控制。在倒車行駛的模擬 當中,我們所要做的動態分析上,主要是以駕駛者的角度、車輛與第一節 車廂的角度、車廂與車廂之間的角度及目標地的位置為考量依據。. 4.1 系統數學模型建立. 圖 4-1 三節車廂拖車模型. 22.
(35) 我們將圖 4-1 之三節車廂車輛的模擬圖,推導出車輛駕駛系統的數學模 式[1]、[8]。 x 0 (k + 1) = x 0 (k ) +. v ⋅ ∆t tan(u (k )) l. (4 - 1 ). x1 (k ) = x0 (k ) − x2 (k ) x 2 (k + 1) = x 2 (k ) +. (4 - 2 ). v ⋅ ∆t sin( x1 (k )) L. (4 - 3 ). x3 ( k ) = x 2 ( k ) − x 4 ( k ) x 4 (k + 1) = x 4 (k ) +. (4 - 4 ). v ⋅ ∆t sin( x3 (k )) L. (4 - 5 ). x5 ( k ) = x 4 ( k ) − x 6 ( k ) x 6 (k + 1) = x 6 (k ) +. (4 - 6 ). v ⋅ ∆t sin( x5 (k )) L. (4 - 7 ). x (k + 1) + x6 (k ) x7 (k + 1) = x7 (k ) + v ⋅ ∆t ⋅ cos( x5 (k )) sin 6 2 . (4 - 8 ). x (k + 1) + x 6 (k ) x8 (k + 1) = x8 (k ) + v ⋅ ∆t ⋅ cos( x5 (k )) cos 6 2 . (4 - 9 ). 其中 x 0 (k ) 、 x 1 (k ) 、 x 2 (k ) 、 x3 (k ) 、 x 4 (k ) 、 x5 (k ) 、 x 6 (k ) 、 x 7 (k ) 、 x 8 (k ) 及 u (k ) 的定義如下:. x 0 (k ) : 車輛的角度. x 1 (k ) : 車輛與第一節車廂的角度 x 2 (k ) : 第一節車廂的角度. x3 (k ) : 第一節車廂與第二節車廂的角度. 23.
(36) x 4 (k ) : 第二節車廂的角度. x5 (k ) : 第二節車廂與第三節車廂的角度. x 6 (k ) : 第三節車廂的角度 x 7 (k ) : 車輛行駛結束後的垂直位置. x 8 (k ) : 車輛行駛結束後的水平位置 u (k ). : 駕駛的輸入角度 本系統所要控制的目的是在沒有任何前進動作下,將此車輛倒車行駛. 至直線位置,即. x1 (k ) , x3 (k ) , x5 (k ) , x6 (k ) , x7 (k ) → 0. 在進行此系統的模擬分析時,車身系統之各項參數值的設定如表 4-1:. 車輛長度 l. 0.087. m. 各節車廂長度 L. 0.13. m. 車輛後退的移動速度 v. -0.1. m/sec. 抽樣時間 ∆t. 0.5. 表 4-1 模擬車身選用的系統參數. 24. sec.
(37) 4.2 T-S 模糊模式 上面(4-1)~(4-9)所推導出的動態數學方程式皆是離散時變的模式,而且 為非線性方程式。為了設計 Model-based 的模糊控制器,因此,我們利用 Takagi-Sugeno 模糊模式的方法去轉換為屬於此三節車廂車輛簡化的模式 如下:. v ⋅ ∆t v ⋅ ∆t x1 (k + 1) = 1 − u (k ) x1 (k ) + L l . (4-10). v ⋅ ∆t v ⋅ ∆t x3 (k + 1) = 1 − x1 (k ) x3 (k ) + L L . (4-11). v ⋅ ∆t v ⋅ ∆t x5 (k + 1) = 1 − x3 (k ) x5 (k ) + L L . (4-12). v ⋅ ∆t x5 (k ) L. (4-13). v ⋅ ∆t x7 (k + 1) = x7 (k ) + v ⋅ ∆t ⋅ sin x6 (k ) + x5 (k ) 2L . (4-14). x 6 (k + 1) = x 6 (k ) +. 在這些簡化後的式子中,(4-14)式仍然是一個非線性的數學方程式,故 藉由 T-S 模糊模式方法,可再將它簡化成(4-15)式: v ⋅ ∆t v ⋅ ∆t ⋅ sin x6 (k ) + x5 (k ) 2L v ⋅ ∆t v ⋅ ∆t = w1 ( p(k )) ⋅ v ⋅ ∆t x6 (k ) + x5 (k ) + w2 ( p(k )) ⋅ v ⋅ ∆t ⋅ g ⋅ x6 (k ) + x5 (k ) L L 2 2 . 25. (4-15).
(38) 其中, p (k ) 、 w1 ( p(k ) ) 及 w2 ( p (k ) ) 分別為如下: p (k ) = x6 (k ) +. v ⋅ ∆t x5 (k ), g = 10 − 2 / π 2L. , p (k ) = 0, 1 w1 ( p (k ) ) = sin( p (k )) − g ⋅ p (k ) , p (k ) ≠ 0, p (k ) ⋅ (1 − g ) . (4-16). , p (k ) = 0, 0 w2 ( p (k ) ) = p (k ) − sin( p (k )) p (k ) ⋅ (1 − g ) , p (k ) ≠ 0, . (4-17). 當 w1 ( p (k )) = 1和 w2 ( p (k )) = 0 時,即 p (k ) = 0 (rad.),把(4-15)式代入(-14) 式會得到下面式子: (v ⋅ ∆t ) 2 x7 (k + 1) = x7 (k ) + v ⋅ ∆t ⋅ x6 (k ) + ⋅ x5 ( k ) 2L. 結果這個系統的簡化的非線性模型可表示為 x1 (k + 1) x3 (k + 1) x5 (k + 1) x (k + 1) 6 x7 (k + 1) . v ⋅ ∆t 0 0 1 − L v ⋅ ∆t v ⋅ ∆t 1− 0 L L v ⋅ ∆t v ⋅ ∆t 0 1− L L v ⋅ ∆t 0 0 L 2 v ⋅ ∆t ) ( 0 0 L. v ⋅ ∆t x1 (k ) 0 0 l 0 0 x3 (k ) 0 0 0 × x5 (k ) + u (k ) 0 1 0 x (k ) 6 0 v ⋅ ∆t 1 x (k ) 7 0 . (4-18). 而當 w1 ( p (k )) = 0 和 w2 ( p (k )) = 1 時,即 p (k ) = π 或 − π (rad.),其(4-14) 式會簡化成下面式子:. 26.
(39) g ⋅ (v ⋅ ∆t ) 2 x7 (k + 1) = x7 (k ) + g ⋅ v ⋅ ∆t ⋅ x6 (k ) + ⋅ x5 ( k ) 2L. 則此系統的簡化的非線性模型可表示為 x1 (k + 1) x3 (k + 1) x5 (k + 1) x (k + 1) 6 x7 (k + 1) . v ⋅ ∆t 0 1 − L v ⋅ ∆t v ⋅ ∆t 1− L L ⋅ ∆ v t 0 L 0 0 0 0 . 0 0 v ⋅ ∆t L v ⋅ ∆t L. 1−. g ⋅ ( v ⋅ ∆t ) L. v ⋅ ∆t x (k ) 0 1 l 0 0 x3 (k ) 0 0 0 × x5 (k ) + u (k ) 0 1 0 x (k ) 6 0 g ⋅ v ⋅ ∆t 1 x (k ) 7 0 0. 2. 27. (4-19).
(40) 第五章 平行分散補償設計 因為自走車系統為不穩定系統,給予輸入信號後輸出都會發散掉,所 以必須使系統穩定後截取資料才有意義。我們使用平行分散補償法來設計 穩定的模糊控制器,利用兩種不同的方法來求得回授增益值 F 。最後利用 MATLAB/SIMULINK 模擬輸出響應(如圖 5-1)然後做比較。 兩種方法分別為: 1.使用線性矩陣不等式(LMI)求得回授增益值 F 。 2.使用 PSO 演算法直接搜尋回授增益值 F 。. backtest1 Zero. S-Function Scope. Out1 In1. PDC. 圖 5-1 MATLAB/SIMULINK 倒車系統模擬圖. 28.
(41) 5.1 控制器設計 5.1.1 模糊系統建立 前一章節中我們已經推導出整個系統的數學動態方程式,並且將整個 非線性系統簡化成(4-18)式及(4-19)式,接著把這個結構的模糊系統建立起 來。故針對三節車廂倒車行駛控制的模式,我們根據 T-S 模糊模型來定義 兩條模糊規則,其規則如下: Rule 1: If p (k ) is “about THEN. 0 (rad.)”. x(k + 1) = A1 x(k ) + B1u (k ). Rule 2: If p (k ) is“about THEN. π or -π (rad.)”. x(k + 1) = A2 x(k ) + B2 u (k ). (5-1). 其中. p= (k ) x6 (k ) +. v ⋅ ∆t x5 (k ) 2L. 2. x(k + 1) =. ∑ wi ( p(k )){Ai x(k ) + Bi u (k )} i =1. (5-2). 2. ∑ wi ( p(k )) i =1. 2. u (k ) = −∑ hi ( p (k )) Fi x(k ). (5-3). i =1. 29.
(42) x(k ) = [ x1 (k ) x3 (k ) x5 (k ) x6 (k ) x7 (k )]T. v ⋅ Δt 0 0 1 − L v ⋅ Δt v ⋅ Δt 1− 0 L L v ⋅ Δt v ⋅ Δt A1 = 0 1− L L v ⋅ Δt 0 0 L (v ⋅ Δt) 2 0 0 2L. v ⋅ ∆t 0 1 − L v ⋅ ∆t v ⋅ ∆t 1− L L v ⋅ ∆t A2 = 0 L 0 0 0 0 . 0 0 1−. v ⋅ ∆t L. v ⋅ ∆t L g ⋅ (v ⋅ ∆t ) 2 2L. 0 0 0 0 0 1 0 v ⋅ Δt 1 . v ⋅ ∆t l 0 B1 = 0 0 0 . 0 0 0 0 0 1 0 g ⋅ v ⋅ ∆t 1 . v ⋅ ∆t l 0 B2 = 0 0 0 . 0. 0. 30.
(43) 5.1.2 平行分散補償法 利用平行分散補償法,可將兩條T-S模糊規則(5-1)式改成以下兩條控制 規則: Rule 1: If p (k ) is “about THEN. 0 (rad.)”. u ( k= ) F1 × x(k ). Rule 2: If p (k ) is“about TH EN. π or -π (rad.)”. u (k= ) F2 × x(k ). (5 -4 ). 其中 2. u (k ) =. ∑ w ( p(k )) x(k ) i. i =1. (5-5). 2. ∑ wi ( p(k )) i =1. x(k ) = [ x1 (k ) x3 (k ) x5 (k ) x6 (k ) x7 (k )]T. Fi 即為回授增益值( i = 1、 2 ). F1 = [ f11 f12 f13 f14 f15 ] F2 = [ f 21 f 22 f 23 f 24 f 25 ] 其中 f11 ~ f 25 共10個變數為LMI和PSO演算法所要求的值. 31.
(44) 5.2 LMI 控制器設計 本小節主要是利用線性矩陣不等式(LMI)的限制條件再藉由 MATLAB 的 LMI 工具箱來找出控制器所需要的狀態回授增益值[18],並利用平行分 散補償(PDC)的概念設計穩定的模糊控制器,做系統的穩定性分析及時間響 應分析 接著將在下面幾個定理中利用 LMI 的特性找出一些共同的正定矩陣 P 及狀態回授增益值 F 來設計控制器,分別為依據控制性能的穩定性的條件 限 制 (Stable Conditions) 、 放 寬 的 穩 定 條 件 限 制 (Relaxed Stability Conditions) 、衰退速率條件限制(Decay rate Conditions)以及在放寬的穩定條 件下衰退速率的條件限制(Decay Rate Fuzzy Controller Design Using Relaxed Stability Conditions)。. 5.2.1 LMI 的條件限制 【定理 5.1】: 穩定性的條件(Stable Conditions) 一 個 穩 定 的 模 糊 控 制 器 藉 由 LMI 求 出 其 增 益 值 Fi , 滿 足 X > 0, M i (i = 1,2) 以及下面兩個不等式。. X Ai X − Bi M i. T T T XAi − M i Bi >0 X . (5-6). 32.
(45) T Ai X + A j X − Bi M j − B j M i 2 ≥0 X . X Ai X + A j X − Bi M j − B j M i 2 . (5-7). 其中 i < j , hi ∩ h j = φ , X = P −1 , M i = Fi X , i = 1,2 而 hi 及 h j 的定義如下: r. 1 r hi ( p(t )) − ∑ ∑∑ 2hi ( p(t ))h j ( p(t )) ≥ 0 , r 為規則數 r − 1 i =1 j <i i =1 2. r. h ( p (t )) ∑=. 1, hi ( p (t )) ≥ 0, for all i. i. i =1. {Α − B F } P{A − B F }− P < 0 i. (5-8). G ij PG ij − P < 0, i < j. (5-9). T. i. i. i. i. i. T. 其中 i, j = 1,2 ,Gij =. {A − B F }+ {A i. i. j. j. − B j Fi }. 2. (5-10). 根據(5-6)、(5-7)式我們可以找出一個正定矩陣 X 和矩陣 M 1 、 M 2 ,再 利用 X 及 M 1、M 2 求出一個共同的正定矩陣 P 滿足(5-8)式和(5-9)式的條件: 0.4908 − 0.0419 0.0199 0.1261 − 0.4605 − 0.4605 2.0160 − 2.3055 0.2289 − 0.1082 P = 0.4908 − 2.3055 2.9051 − 0.3277 0.1554 0.2289 − 0.3277 0.0781 − 0.0368 − 0.0419 0.0199 − 0.1082 0.1554 − 0.0368 0.0586. 在我們設計的控制器中,所需要的回授增益值如下:. F1 = [− 4.8573 11.4196 − 9.6224 0.5938 − 0.2752] F2 = [− 4.8573 11.4182 − 9.6183 0.5804 − 0.2747]. 33.
(46) 【定理 5.2】: 放寬的穩定條件(Relaxed Stability Conditions) 其次使用一個放寬的穩定條件(Relaxed Stability Conditions)來設計控 制器,而其回授增益 Fi ,滿足 X > 0, Y > 0, M i (i = 1,2) ,以及下面兩個不 等式:. X − ( s − 1)Y Ai X − Bi M i. T T T XAi − M i Bi >0 X . (5-11). T Ai X + A j X − Bi M j − B j M i 2 ≥0 X . X +Y Ai X + A j X − Bi M j − B j M i 2 . (5-12). 其中 i < j , hi ∩ h j = φ , X = P −1 , M i = Fi X , Y = XQX ,1 < s ≤ r , r :規則數 Gii PGii − P + ( s − 1)Q < 0, T. Gij + Gij 2 . G + Gij P − ij 2 T. (5-13). − P − Q < 0, . (5-14). 其中 P = X −1 , Q = PYP. 根據(5-11)、(5-12)式,我們找出一個正定矩陣 X 、Y 和矩陣 M 1 、 M 2 , 再利用 X 、 Y 及 M 1 、 M 2 求出一個共同的正定矩陣 P 滿足(5-13)式和(5-14) 式的條件:. 34.
(47) 0.1872 − 0.0170 0.0084 0.0459 − 0.1721 − 0.1721 0.7669 − 0.8934 0.0928 − 0.0459 P = 0.1872 − 0.8934 1.1408 − 0.1341 0.0662 0.0928 − 0.1341 0.0312 − 0.0154 − 0.0170 0.0084 − 0.0459 0.0662 − 0.0154 0.0225. 而回授增益值 F1 及 F2 分別為:. F1 = [− 4.9224 11.7790 − 10.0925 0.6597 − 0.3184] F2 = [− 4.9193 11.7700 − 10.0816 0.6439 − 0.3182]. 【定理 5.3】: 在放寬的穩定條件下衰退速率的模糊控制器的設計(Decay Rate Fuzzy Controller Design Using Relaxed Stability Conditions) 使用一個衰退速率的穩定條件(Decay Rate Conditions)來設計模糊控制 器,而其回授增益 Fi ,滿足 X > 0, M i (i = 1,2) ,以及下面的不等式: minimize β X ,Y , M 1 ⋅ ⋅ ⋅ M r. βX Ai X − Bi M i. T T T XAi − M i Bi >0 X . βX A X +A X − B M − B M j i j j i i 2 . (5-15). T Ai X + A j X − Bi M j − B j M i 2 ≥0 X . 其中 i < j , hi ( p(t ) )h j ( p(t ) ) = 0, X = P −1 , M i = Fi X , 0 ≤ β < 1. 35. (5-16).
(48) Gii PGii − α 2 P < 0 T. G ij +G ji 2. Gij + G ji P 2 T. (5-17). − α 2 P ≤ 0 . (5-18). 根據(5-15)、(5-16)式,找出一個正定矩陣 X 和矩陣 M 1、 M 2,再利用 X 及 M 1 、 M 2 找出一個共同的正定矩陣 P 滿足(5-17)式和(5-18)式的條件: 其中求出 α = 0.9973,且 β = α 2 。. 0.7981 − 0.0749 0.0456 0.1765 − 0.7161 − 0.7161 3.1643 − 3.6884 0.3783 − 0.2307 P = 1.0e + 028 * 0.7981 − 3.6884 4.5460 − 0.5088 0.3104 0.3783 − 0.5088 0.0923 − 0.0564 − 0.0749 0.0456 − 0.2307 0.3104 − 0.0564 0.0564 . 而回授增益值 F1 及 F2 分別為:. F1 = [− 5.1921 13.0563 − 11.4815 0.7905 − 0.4713] F2 = [− 5.2183 13.1410 − 11.5176 0.7668 − 0.4674]. 【定理 5.4】: 在放寬的穩定條件下衰退速率的模糊控制器的設計(Decay Rate Fuzzy Controller Design Using Relaxed Stability Conditions). 36.
(49) 使用在放寬的穩定條件下(Relaxed Stability Conditions)衰退速率(Decay Rate)的模糊控制器,這是結合定理 5.2 及 5.3 的穩定條件,進而求出回授增 益值 Fi ,滿足 X > 0, Y ≥ 0, M i (i = 1,2) ,以及下面的不等式:. βX − ( s − 1)Y Ai X − Bi M i. T T T XAi − M i Bi >0 X . βX + Y Ai X + A j X − Bi M j − B j M i 2 . (5-19). T Ai X + A j X − Bi M j − B j M i 2 ≥0 X . (5-20). 其中, i < j , hi ∩h j ≠ φ , X = P −1 , M i = Fi X , Y = XQX , 0 ≤ β < 1 Gii PGii − α 2 P + ( s − 1)Q < 0. (5-21). G ij +G ji 2. (5-22). T. Gij + G ji P 2 T. − α 2 P − Q ≤ 0 . 其中, P = X −1 , Q = PYP , 1 < s ≤ r , r :規則數。 根據(5-19)、(5-20)式找出一個正定矩陣 X 、 Y 和矩陣 M 1 、 M 2 ,再利 用 X 、Y 及 M 1、 M 2 找出一個共同的正定矩陣 P 及 Q ,滿足 (5-21)式和(5-22) 式的條件: 其中求出 α = 0.9973,且 β = α 2 。. 37.
(50) 0.2028 − 0.0381 0.0383 0.0221 − 0.1278 − 0.1278 0.7508 − 1.2048 0.2304 − 0.2319 P = 1.0e + 026 * 0.2028 − 1.2048 1.9559 − 0.3825 0.3851 0.2304 − 0.3825 0.0795 − 0.0801 − 0.0381 0.0383 − 0.2319 0.3851 − 0.0801 0.0877 . 而回授增益值 F1 及 F2 分別為:. F1 = [− 6.2854 20.1022 − 23.3164 3.1512 − 3.0206] F2 = [− 6.2852. 20.1014 − 23.2864 3.0005 − 3.0205]. 5.2.2 LMI 模糊控制系統模擬分析 對前述 LMI 的四種限制條件求得的回授增益值 F ,利用平行分散補償 法(PDC)設計穩定的模糊控制器,並以 MATLAB/SIMULINK 模擬倒車系統 的輸出響應(如圖 5-2)。 利用(4-10)~(4-14)式將倒車系統的動態方程式寫成 S-Function 方塊(附 錄一),模糊規則寫入 LMI-PDC 方塊中,擬擬系統的輸出。說明如下: 在模擬實驗中我們以步階響應為輸入信號,以「0」為終值,將 x1、 x3 、. x5 、 x6 及 x7 等變數的初始條件均設為 0.2(rad.),主要考量是將輸出值限制 在 π / 2 以下,以避免卡刀(jack-knife)的現象發生,其結果顯示在圖 5-3〜圖 5-7 中。 38.
(51) backtest1 Zero. S-Function Scope. Out1 In1. LMI PDC. 圖 5-2 倒車系統 LMI 模糊控制器模擬圖. 1.5 stabel relax decay rate decay-relax. 1. x1(rad). 0.5. 0. -0.5. -1. 0. 10. 20. 30. 圖 5-3. 40. 50 time(sec). 60. 70. 80. x1 的輸出響應圖(LMI). 39. 90. 100.
(52) 0.6 stable relax decay rate decay-relax. 0.5. 0.4. x5(rad). 0.3. 0.2. 0.1. 0. -0.1. 0. 10. 20. 30. 圖 5-4. 40. 50 time(sec). 60. 70. 80. 90. 100. x3 的輸出響應圖(LMI). 0.2 stable relax decay rate decay-relax. 0.15. x5(rad). 0.1. 0.05. 0. -0.05. -0.1 0. 10. 20. 30. 圖 5-5. 40. 50 time(sec). 60. 70. 80. x5 的輸出響應圖(LMI) 40. 90. 100.
(53) 0.2 stable relax decay rate decay-relax. 0.15. 0.1. x6(rad). 0.05. 0. -0.05. -0.1. -0.15 0. 20. 40. 60. 圖 5-6. 80. 100 time(sec). 120. 140. 160. 180. 200. x6 的輸出響應圖(LMI). 0.25 stable relax decay rate decay-relax. 0.2. x7(rad). 0.15. 0.1. 0.05. 0 0. 20. 40. 圖 5-7. 60. 80. 100 time(sec). 120. 140. 160. x7 的輸出響應圖(LMI). 41. 180. 200.
(54) 在放寬的穩定條件下衰退速率的穩定模糊控制器(定理5.4)的設計之 下,角度輸出的最大值約為1.3(rad.)小於 π / 2 ,完全到達穩定約為80秒,表 示若以穩定時間來講,這個控制器的動作性能經過模擬證實是這幾種控制 器裡最好的,並且符合我們的要求。 但是畢竟拖車上面可能會有載人的情況,車子的搖擺也就是角度的振 幅,會影響到乘客的舒適度,就這點而言則是(定理5.1~5.3)所設計的控制器 較佳。. 5.3 PSO演算法控制器設計 5.3.1 PSO演算法之於PDC設計 利用圖5-8以PSO演算法搜尋回授增益值 F ,而PSO演算法則使用MATLAB 公司所提供的免費共享軟體Particle Swarm Toolbox[19]。. backtest1 Zero. S-Function Scope. Out1 In1. PSO PDC. 圖 5-8 倒車系統 PSO 模糊控制器模擬圖 42.
(55) 其中 PSO-PDC 方塊內容為圖 5-9. 1. Out1 fuzzy rlue 1. Gain1 K*u. y. y. y. y. K*u. K*u. fuzzy rlue 6 y. pdc6. u. pdc3. u. pdc4. u. fuzzy rlue 5. Gain5. Gain6. pdc2. fuzzy rlue 4. Gain4 K*u. u. fuzzy rlue 3. Gain3 K*u. In1. fuzzy rlue 2. Gain2 K*u. pdc1. 1. y. pdc5. u. u. 圖 5-9 PDC 模糊規則方塊圖 其中 6 個 Embedded MATLAB Function 方塊(fuzzy rule 1~6)內容為模糊 規則(附錄二),8 個 Gain 方塊如下: Gain1、Gain2、Gain5、Gain6 為. F1 = [ f11 f12 f13 f14 f15 ] Gain3、Gain4 為. F2 = [ f 21 f 22 f 23 f 24 f 25 ] 其中 f11 ~ f 25 共 10 個變數為 PSO 演算法所要求的值. 43.
(56) 最後求得結果為: F1 =[-9.9801. 6.3044. -7.159. F2 =[-5.0785. 13.006 -11.749. -1.2742. -7.8519]. 0.98315. -0.55302]. 5.3.2 PSO模糊系統模擬分析 利用PSO演算法搜尋到的回授增益值 Fi ,再以平行分散補償法(PDC)設 計穩定的模糊控制器,最後用MATLAB/SIMULINK模擬倒車系統的輸出響 應(如圖5-8),設定條件則和5.2.2節一致,其結果顯示在圖5-10〜圖5-14中。. 1.2. 1. 0.8. x1(rad). 0.6. 0.4. 0.2. 0. -0.2. -0.4. 0. 10. 20. 30. 圖 5-10. 40. 50 time(sec). 60. 70. 80. x1 的輸出響應圖(PSO). 44. 90. 100.
(57) 0.5. 0.4. x3(rad). 0.3. 0.2. 0.1. 0. -0.1. -0.2. 0. 20. 10. 30. 40. 圖 5-11. 50 time(sec). 60. 70. 90. 80. 100. x3 的輸出響應圖(PSO). 0.2. 0.15. x5(rad). 0.1. 0.05. 0. -0.05. -0.1 0. 10. 20. 30. 40. 圖 5-12. 50 time(sec). 60. 70. 80. x5 的輸出響應圖(PSO). 45. 90. 100.
(58) 0.25. 0.2. x6(rad). 0.15. 0.1. 0.05. 0. -0.05. -0.1. 0. 10. 20. 30. 圖 5-13. 40. 50 time(sec). 60. 70. 80. 90. 100. 90. 100. x6 的輸出響應圖(PSO). 0.2 0.18 0.16 0.14. x7(m). 0.12 0.1 0.08 0.06 0.04 0.02 0 0. 10. 20. 30. 圖 5-14. 40. 50 time(sec). 60. 70. 80. x7 的輸出響應圖(PSO). 46.
(59) 利用PSO演算法所設計的模糊控制器,模擬輸出響應結果 x1的最大值約 為1.05(rad.)小於 π / 2 ,符合我們的要求,而達到完全穩定的時間均約為75 秒。. 5.4 模擬結果比較 就 5.2.2 節的模擬結果觀之,以穩定所需的時間來說以 LMI 的(定理 5.4)(以下簡稱 decay-relax)所設計的模糊控制器最為理想,(定理 5.3)(以下簡 稱 decay)次之,所以本小節利用這兩種控制器的模擬結果來與 5.3.2 節的結 果做比較與分析,顯示如圖 5-15~圖 5-19。. 1.5 decay rate decay-relax PSO 1. x1(rad). 0.5. 0. -0.5. -1. 0. 10. 20. 圖 5-15. 30 time(sec). 40. x1 輸出響應比較圖. 47. 50. 60.
(60) 0.6 decay rate decay-relax PSO. 0.5. 0.4. x3(rad). 0.3. 0.2. 0.1. 0. -0.1. -0.2. 0. 20. 10. 30. 40. 圖 5-16. 50 time(sec). 60. 70. 90. 80. 100. x3 輸出響應比較圖. 0.2 decay rate decay-relax PSO. 0.15. x5(rad). 0.1. 0.05. 0. -0.05. -0.1 0. 20. 40. 圖 5-17. 60 time(sec). 80. x5 輸出響應比較圖. 48. 100. 120.
(61) 0.25 decay rate decay-relax PSO. 0.2. 0.15. x6(rad). 0.1. 0.05. 0. -0.05. -0.1. -0.15. 120. 100. 80. 60. 40. 20. 0. 140. time(sec). 圖 5-18. x6 輸出響應比較圖. 0.25 decay rate decay-relax PSO. 0.2. x7. 0.15. 0.1. 0.05. 0. -0.05. 0. 20. 40. 60. 圖 5-19. 80 100 time(sec). 120. x7 輸出響應比較圖. 49. 140. 160. 180.
(62) 就 圖 5-15~圖 5-19 的 模 擬 結 果 顯 示 , 使 用 PSO 設 計 的 模 糊 控 制 器 與 (decay-relax)所設計相較之下,前者能更快的到達穩定,大約快5秒。但是就 角度的振幅來講,使用PSO設計的模糊控制器卻又比用(decay-relax)所設計 來的小,大約介於(decay-relax)與(decay)之間,證明以PSO演算法所設計的 模糊控制器可兼顧穩定時間與角度大小。. 50.
(63) 第六章 系統鑑別 近幾年來,隨著電腦科技的日益進步,電機控制之技術愈來愈精確化 及智慧化,控制的應用在日常生活中隨處可見。傳統的控制理論(古典控 制或現代控制)均是利用受控對象的數學模型對系統進行定量分析,再設 計控制器,故對於受控系統而言,均需要有一個精確的數學模型,才能獲 得較佳的控制結果。但是絕大多數實際的系統其數學模型,多是未知,且 包含複雜的非線性關係,當工作環境改變時,受控系統模型之參數也會隨 之改變,因此要建立系統精確的數學模型,一般來說是較困難的,甚至是 不可能的。 一般模型化的方法是進行系統分析、設計、預測、控制、決策的前提 和基礎,在無法獲得受控體的數學模型時,便無法準確的設計其控制器, 而系統鑑別方法則是建立受控系統數學模型的重要途徑之一,故能獲得迅 速的發展,並已成為自動控制一個十分活躍而又重要的分支。本章節所要 探討的是針對一個系統在無法得知數學模型時,如何進行系統的控制,分 別就模糊鑑別理論及 T-S 模型的模糊系統的鑑別加以探討。. 51.
(64) 6.1 模糊鑑別理論 近代對於線性系統的鑑別方法可說已發展到成熟的階段,而對非線性 系統的鑑別雖行之有年但仍有不小的發展空間,其中模糊鑑別便是一種有 效的非線性鑑別方法。1965 年 Zadeh 提出模糊集合的概念,並且利用模糊 邏輯模型作為將輸入特徵空間到輸出空間的非線性映射。1985 年 Takagi 和 Sugeno 兩位學者依受控體實際輸入輸出資料,運用模糊關係和模糊推論 的方法建立一個線性模型,稱之為 TSK 模型(以下簡稱 T-S 模型)[11]。 T-S 模型可將非線性的系統或受控體模型轉換為模糊輸入空間的線性子系 統來做鑑別,並且將受控體的數學模型區分為結構鑑別和參數鑑別兩個部 分。另外,最小平方的估計算法(Least-Squares;LS) [20]亦常被用來針對此 線性模型參數作指標衡量的工具之一。 在最近文獻裡更有各種各樣 T-S 模型方法被發現用來描述相關的動態 系統,如規則集合被表達以狀態空間形式來代表區域線性系統[2];或運用 叢集的方法(clustering method)來劃分輸入輸出空間,並結合基因算法[21], 或最小平方法,或梯度下降法(gradient descent)[22]、[23]等最佳化方法,來 獲得模型的參數。近年來有許多的研究,已經將模糊控制和類神經網路 (Neural Network;NN)[24]、[25]、適應性架構[26]、[27]或基因演算法[28]、 [29]相結合,以彌補模糊控制在歸屬函數、尺規因子及規則庫設計上的不 足。下面兩個小節中將說明系統鑑別概要以及模糊鑑別器的架構。. 52.
(65) 6.1.1 系統鑑別概要 傳統的控制不論是古典控制或是現代控制對於受控體均需要精確的數 學模型,才可得到較佳的控制結果。但是多數實際的系統其數學模型大多 是未知且包含複雜的非線性關係,當工作環境改變時,受控系統模型之參 數也會隨之改變,因此要建立精確的數學模型一般是很困難的,甚至是做 不到的。而當我們無法獲得受控體的數學模型時,利用系統鑑別的方法是 建立受控系統數學模型的重要途徑之一。 建立具有系統的行為特徵之模型稱為模型化(modeling)。而對應不同系 統與目的而存在有各種模型化的方法,其大致可分為數學模型的使用及圖 形模型的使用。數學模型是使用如微分方程式、代數方程式或邏輯式的數 學式子來表示系統的行為;另一方面,圖形模型是使用圖形來表示組成系 統的要素之連接或系統內的情報傳達路徑,如方塊圖、信號流程圖等均是。 廣義的系統鑑別是由動態系統的輸入輸出資料之測定值,根據某個目 的可以證明與系統是同等關係而作出的數學模型。當然不同目的所使用的 辨別方法亦不相同,而一般要作出與控制對象完全同等的模型似乎是不太 可能的,因此在組成控制上加入重要的特性到模型中而獲得相似結果就視 為是同等。控制系統設計常使用的有轉移函數、頻率轉移函數及步階響應 等方法,至於要使用何種方法是依據系統鑑別法和控制系統設計而定[30]。. 53.
(66) 6.1.2 模糊鑑別器的架構 考慮如式 y (k ) = f ( y (k − 1)... y (k − m); x(k − 1)...x(k − n)) 之離散非線性系 統,函數 f 即是我們要鑑別的未知函數,代表一個未知的非線性映射, x 和. y 分別為未知函數系統的輸入和輸出, n 和 m 為系統的輸入和輸出階數。我 們是要利用模糊系統 fˆ 來鑑別未知函數 f ,其架構如圖 6-1 所示(簡稱並聯 鑑別模型架構)[31、32],亦即要使系統的輸出 y 與鑑別器的輸出 fˆ 之間的 誤差 e 最小,數學模式如(6-1)所示。. y 未知系統 f. u. +. e. -. yˆ. 模糊系統 fˆ. 圖 6-1 並聯鑑別模糊架構. yˆ (k ) = fˆ ( y (k − 1)... y (k − m); x(k − 1)...x(k − n)). (6-1). 其中 fˆ 為模糊系統, yˆ 為模糊鑑別器的輸出,當量測到的輸出 y 有雜訊 加入時,建模(modeling)系統將可能會有所偏差,而當輸入模糊系統有所偏 差時,將無法判斷系統的輸出誤差 e 是來自於參數不匹配或是輸入不正確. 54.
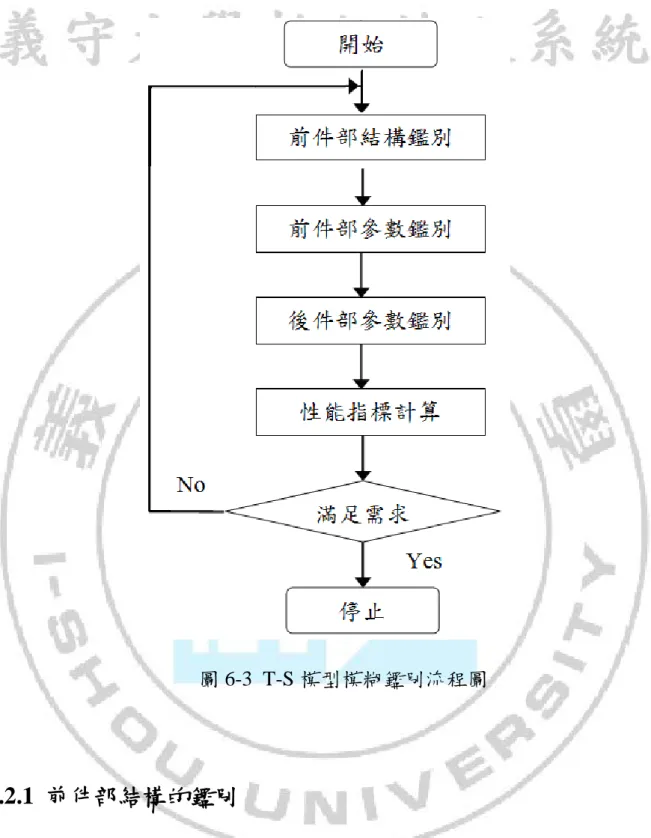
(67) 所致,為了解決上述問題,將此系統改良為如圖 6-2 架構(簡稱串並聯鑑 別模型架構)[31]、[32],其模糊模型的輸入是採用其本身的輸出 yˆ ,而不 用未知函數量測值 y ,其數學模式如(6-2)式所示。. 未知系統 f +. u. e. -. yˆ. 模糊系統 fˆ. 圖 6-2 串並聯鑑別模糊架構. yˆ (k ) = fˆ ( yˆ (k − 1)... yˆ (k − m); x(k − 1)...x(k − n)). (6-2). 6.2 T-S 模型的模糊系統鑑別 1985 年 Takagi 和 Sugeno 提出一種動態系統的模糊鑑別的方法[11] , 這種模型一般簡稱為 T-S 模型,應用 T-S 模型對受控對象動態模型進行系 統鑑別,可分為前件部結構鑑別和參數鑑別二部份,其中參數鑑別又分為 前件部參數和後件部參數的鑑別[32]。T-S 模糊模型鑑別流程圖如圖 6-3 所 示。茲針對結構及參數鑑別功能及方法說明如下[33]:. 55.
(68) 圖 6-3 T-S 模型模糊鑑別流程圖. 6.2.1 前件部結構的鑑別 首先確定前件部中的具體輸入變量,並對輸入空間進行較佳的劃分。 若前件部中的輸入變量為 x1 , x2 ...xm ,每一條規則均表示一種局部輸入輸出 的 關 係 , 如 某 條 規 則 表 示 x1 = P1 ,. x2 = Q1 , 而 模 糊 子 空 間 其 關 係 為. y = a1 x1 + b1 x 2 + c1 。初始的前件部變量儘可能由被考慮的輸入變量中去作選. 56.
(69) 擇,其次再由參數鑑別得到對應性能指標最小化所鑑別的前件部變量組合 來替代,示意圖如圖 6-4 所示[33]。. 圖 6-4 前件部結構的鑑別示意圖 步驟一:鑑別普通的線性模型,並計算出它的性能指標為 PER(1)。 步驟二:將 x1 劃分為兩個模糊子空間,再依鑑別前件部參數和後件部參數, 計算出相對應的 PER,接著再對 x2 , x3 ...xm 等變量依上述的方式 做 處理,以期找出最小的 PER(2)及相對應的 STR(2)。 步驟三:把模糊子空間由兩個變成三個,再根據其所構成的前件部結構來 鑑別相關的參數,以期計算並選出最小的 PER 做為 PER(3)和 STR(3)。 步 驟 四 : 重 複 步 驟 三 的 概 念 一 直 到 滿 足 PER 小 於 預 定 值 或 是. [ PER(i ) − PER(i − 1)] / PER(i ) ≤ η , η 規則數達到預定值或是給定的 正小數值。. 57.
(70) 步驟五:如果滿足上述的要求,即可得到最佳性能指標為 PER(i ) 及最佳結 構為 STR (i ) ,並獲得相對應的前件部參數,至此鑑別系統結束動 作,否則將返回步驟四繼續找出所需要的數值。. 6.2.2 前件部參數的鑑別 給定一組輸入輸出的數據,求出使性能指標達到最小的前件部參數。 這裡所採用的性能指標(PER)是誤差平方的均方值如(6-3)式所示,其中誤差 是實際系統的輸出值和鑑別器輸出值的差。另外,模糊集合的歸屬函數均 是由直線所組成,如圖 6-5 所示,其中直線的轉折點 p1 、 p2 、…、 p8 均為 前件部參數。前件部參數的鑑別一般採用非線性規劃,以求得最佳的參數。 在鑑別的系統中要注意每個前件部參數是否滿足相對應前件部變量的定義 域要求及對於每個前件部變量範圍的劃分,必須滿足定義域內能夠有相對 應的模糊子空間的任何前件部變量,才能確保鑑別結果的正確性。. 2. 1 1 R PER = [ ∑ ( y m − yˆ m ) ] 2 R m=1. (6-3). 其中 y m 為第 m 個取樣時間的實際輸出值, yˆ m 是鑑別模糊模型所計算出 來的第 m 個取樣時間的輸出值, R 為取樣的次數。. 58.
(71) 圖 6-5 前件部模糊集合與前件部參數. 6.2.3 後件部參數的鑑別 後件部參數鑑別的目的是在確定出每條規則的後件部方程式中的各項 係數。由(6-4)式模型輸出 yˆ 可寫成(6-5)式[33]。. ∑ y=y ×y yˆ = ∑ y =y i. i. (6-4). i. 1 1 1 2 2 yˆ = P0 Q1 + P1 Q1 x1 + ... + Pn Q1 xn + P0 Q 2 + P1 Q 2 x1. + ... + P0 Q m + P1 Q m x1 + ... + Pn Q m xn m. m. m. (6-5). = H ⋅ IT. 其中 n. Qi =. Gi , Gi = Ai j ( x j 0 ) , ∏ 為模糊化運算子取 min 運算。 ∏ m j =1 ∑Gi i =1. H = (Q1 , Q1 x1 ,..., Q1 xn , Q 2 , Q 2 x1 ,..., Q 2 xn ,..., Q m , Q m x1 ,..., Q m xn ) I = ( P0 , P1 ,..., Pn , P0 , P1 ,..., Pn ,..., P0 , P1 ,..., Pn ) 1. 1. 1. 2. 2. 2. m. m. 59. m.
(72) H 是數據行向量, I 是待鑑別的參數向量,當給定一組輸入輸出的數. 據之後,再利用最小平方法對 I 參數進行鑑別,可以確定極佳的後件部參數。. 6.3 模糊模型之推論方法 在對一個模糊系統做穩定性分析之前,先須瞭解模糊系統的模糊模 型。以下針對Takagi-Sugeno所提出的完整模糊模型和推論方法做詳細的說:. Li :IF x(k ) is A1i and….and x(k − n + 1) is Ani and u (k ) is B1i and ….and u (k − m + 1) is B mi THEN x t (k + 1) = a1i x(k ) + ... + a ni x(k − n + 1) + b1i u (k ) + .... + bmi u (k − m + 1). (6-7) 其中 Li (i = 1,2,...l ) :表示第i個模糊規則,. x t (k + 1) :表示第i個規則的輸出,. a ip ( p = 1,2,....., n) :表示狀態變數的推論參數, bqi (q = 1,2,...., m) :表示輸入的推論參數,. x(k ) + ....x(k − n + 1) :表示系統的狀態變數, u (k ) + .......u (k − m + 1) :表示系統的輸入變數,. A pi 和 B qi :為各個變數所對應的模糊集合。. 假設輸入為 x(k ) + ....x(k − n + 1), u (k ) + .......u (k − m + 1),則模糊模型最後 60.
(73) 的輸出是由觸發規則庫後的適合度模糊輸出 x t (k + 1) ,進行解模糊化而求 得。其所用的方法為加權平均法(Weighted Average Method)如下式所示: l. x(k + 1) = ∑ i =1. w u x i (k + 1) l. ∑w. (6-8). i. i =1. 其中, x i (k + 1) 是輸入變數經由第 i 個規則所得到的輸出,而 w i 是指第. i 個規則在最後輸出部分 x i (k + 1) 所佔的權重(Weight)。權重的計算方法如 下: n. m. w = ∏ A ( x(k − p + 1)) × ∏ Bqi (u (k − q + 1)) i. i p. p =1. 其中. l. ∑w. i. q =1. >0 。. i =1. 61. (6-9).
(74) 6.4 非線性倒車系統鑑別 在此我們希望鑑別出所設計的非線性倒車系統準確的 T-S 模型,必須 先取得系統的輸入與輸出資料(如圖 6-1),再藉由 PSO 演算法做鑑別[34]。 為了能完整鑑別出系統的特性,我們以掃描波(Chirp Signal)作為系統的輸入 訊號。. in. out. To File. To File1 backtest1. Chirp Signal. S-Function Scope. Out1 In1. PSO PDC. 圖 6-6 倒車系統的模擬圖. 6.4.1 T-S 模糊模型建立 因為我們已經推導出整個倒車系統的非線性模型(4-18)、(4-19),在此 用模糊模式建立出三條 T-S 模糊規則來做系統鑑別。故針對倒車系統的模 型,我們根據 T-S 模糊模型來定義三條模糊規則,其中一條三角型、二條 梯型歸屬函數(如圖 6-2),規則如下:. 62.
(75) Rule 1 : IF x1 (k ) is trapmf ( p (k ),[−9.42 − 6.28 − 3.14 0]) THEN x1 (k += 1) A1 x(k ) + B1u (k ). Rule 2 : IF x1 (k ) is trimf ( p (k ),[−3.14 0 3.14]) THEN x1 (k += 1) A2 x(k ) + B2u (k ). Rule 3 : IF x1 (k ) is trapmf ( p (k ),[0 3.14 6.28 9.42]) THEN x1 (k += 1) A3 x(k ) + B3u (k ). (6-10). 其中 A1 ~ A、 3 B1 ~ B3 為系統參數。. 圖6-7 三條模糊規則範圍表示圖. 6.4.2. PSO 演算法之系統鑑別. = A1 A= 、 B3 ,再利用(4-18)、(4-19) 考慮模糊到規則的對稱性,使的 3 B1. 式依據 T-S 模糊規則(6-10)式假設兩組系統變數如下: p (1) p (3) 0 A= A= 1 3 0 0. 0 p (4) p(5) 0 0. 0 0 p(6) p (7) p (8). 0 0 0 1 p(9). 63. 0 0 0 0 1 . p (2) 0 B= B= 0 1 3 0 0 .
數據
Outline
相關文件
Sheu, 2006, “Integrating Multivariate Engineering Process Control and Multivariate Statistical Control,” International Journal of Advanced Manufacturing Technology 29, 129-136.
Godsill, “Detection of abrupt spectral changes using support vector machines: an application to audio signal segmentation,” Proceedings of the IEEE International Conference
Avramenko, “Analysis of stability of bioconvection of motile oxytactic bacteria in a horizontal fluid saturated porous layer,” International Communication Heat Mass Transfer,
LAN MAN Standards Committee of the IEEE Computer Society(1999), “ Wireless LAN Medium Access Control(MAC) and Physical Layer(PHY) Specifications,” International Standard ISO/IEC
Harma, “Automatic identification of bird species based on sinusoidal modeling of syllables,” in Proceedings of IEEE International Conference on Acoustics, Speech,
Dragan , “Provably good global buffering using an available buffer block plan”, IEEE International Conference on Computer-Aided Design, pp.. Cong, “Interconnect performance
Kalker, “Speed-Change Resistant Audio Fingerprinting Using Auto-Correlation,” in IEEE International Conference on Acoustics, Speech, and Signal Processing, vol. Kalker,
Plumbley, “Beat Tracking with a Two State Model,” IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP 2005), vol. Honing, “Computational
