行政院國家科學委員會專題研究計畫 成果報告
DNA 檢測之微全分析系統之研發--子計畫三:脈動式混合微 擴散器的研究發展(第 3 年)
研究成果報告(完整版)
計 畫 類 別 : 整合型
計 畫 編 號 : NSC 96-2221-E-011-100-MY3
執 行 期 間 : 98 年 08 月 01 日至 99 年 07 月 31 日 執 行 單 位 : 國立臺灣科技大學機械工程系
計 畫 主 持 人 : 孫珍理
計畫參與人員: 碩士班研究生-兼任助理人員:陳敦川 碩士班研究生-兼任助理人員:林祐任
報 告 附 件 : 出席國際會議研究心得報告及發表論文
處 理 方 式 : 本計畫涉及專利或其他智慧財產權,1 年後可公開查詢
中 華 民 國 99 年 10 月 20 日
行政院國家科學委員會補助專題研究計畫 ■ 成 果 報 告
□期中進度報告 DNA 檢測之微全分析系統之研發
子計畫三:脈動式混合微擴散器的研究發展
計畫類別:□個別型計畫 ■整合型計畫 計畫編號:NSC 96-2221-E-011 -100 -MY3
執行期間: 96 年 8 月 1 日至 99 年 7 月 31 日 執行機構及系所:國立台灣科技大學機械系
計畫主持人:孫珍理 共同主持人:
計畫參與人員:謝景揚、謝新賢、孫家愔
成果報告類型(依經費核定清單規定繳交):□精簡報告 ■完整報告
本計畫除繳交成果報告外,另須繳交以下出國心得報告:
□赴國外出差或研習心得報告
□赴大陸地區出差或研習心得報告
■出席國際學術會議心得報告
□國際合作研究計畫國外研究報告
處理方式:除列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
中 華 民 國 99 年 7 月 31 日
目錄
目錄 ... 2
I. 摘要 ... 3
ABSTRACT ... 3
II. 前言 ... 4
III. 結果 ... 6
1. 壓力脈動式微混合器... 6
1.1 漸闊型微混合器 ... 8
1.2 漸縮型及直管微混合器 ... 10
2. 電滲式驅動漸闊型微混合器... 10
2.1 電滲流驅動原理 ... 11
2.2 ME 隨時間的變化 ... 13
2.3 相位差與漸闊半角對混合效率之影響 ... 14
3. 凹面型微流振盪器... 16
3.1 混合效率 ... 17
3.2 流場特徵 ... 20
3.3 頻率響應 ... 23
4. 討論... 24
4.1 主動式漸闊型微混合器 ... 24
4.2 電滲式漸闊型微混合器 ... 24
4.3 微流振盪器 ... 25
參考文獻... 25
I. 摘要
本子計劃在在三年內,已完成不同制動方式之脈動式混合微擴散器的設計與效能量化。第一年 中,針對不同半角的主動式漸闊型微混合器進行設計與元件製作,自行設計了包含雙凸輪的正弦 壓力產生機構,深入探討動態制動的相位差對於混合效率的影響。並利用螢光激發法進行實驗量 測與混合流場觀測。在模擬方面,將主動式漸闊型微混合器的半角固定為25°,入口處的邊界條件 為正弦壓力制動,壓力振幅及頻率分別固定為500 Pa 及 100 Hz。由模擬結果可發現,當兩流體入 口處的動態壓力恰為反相(antiphase)時,混合介面的拉伸與摺疊現象最為顯著,可得最佳混合指標 (MI, mixing index) 為 0.6。在實驗方面,先利用 SU8 光阻與微影製程在矽晶圓上製作 SU8 母模,
再以PDMS (Poly-Di-Methyl Siloxane) 進行翻印製作漸闊型微混合器元件。微混合器的驅動則利用 了自行設計的雙凸輪機構產生隨時間變化的正弦壓力,搭配螢光劑與分光鏡量測元件中的混合變 異係數(CV, coefficient of variance)。其中,所測試的漸闊型微混合器半角範圍為 0°至 55°,驅動壓 力的相位差為0 (in-phase), 0.25π, 0.5π, 0.75π, π (antiphase), 1.25π, 1.5π, 1.75π。實驗結果發現,當半 角為20°相位差為 0.75π時,可得最佳混合效果,CV 值為 0.04。
在第二年中,我們嘗試改變驅動方式,探討動態電滲驅動下微漸闊型混合器內的混合效率。利 用ITO(indium tin oxide) 晶圓製作微電極基板,以高壓電源供應器產生電滲流驅動,並利用染料標 註方式進行實驗量測與混合流場觀測。實驗時,以正光阻為蝕刻遮罩,於 ITO 鍍膜玻璃表面製作 微電極,再利用SU8 與 PDMS 翻模製程完成微漸闊型混合器元件,最後將 ITO 基板與切割完成的 PDMS 元件對準封裝,並接上流管。流體驅動則利用了自行設計的高壓電源供應模組,產生隨時 間變化的方波電壓,搭配加入固定濃度染劑的工作流體,以量測元件中的混合效率(ME, mixing efficiency)。其中,所測試的漸闊型微混合器半角為 0°, 5°, 20°, 35°, 50°,疊加壓頭的高度為 1 mm, 5 mm, 10 mm,驅動電壓的模式可分為 unipolar 與 bipolar actuation 兩種,驅動電壓的相位偏移為 0 (in-phase), 0.25π, 0.5π, 0.75π, π (antiphase)。實驗結果發現,在以 bipolar actuation 驅動,疊加壓頭 為 1 mm,半角為 0°,相位偏移為 0.5π時,可得最佳混合效果,其 ME 值約為 0.8。
在第三年中,我們改變了產生脈動流的機制,設計一衝射凹面型之微流振盪器,利用自持性流 體振盪來達到增強混合的目的。將Görtler不穩定性結合使流體產生偏折的Coandă效應,擋體後方 的尾流會產生橫向擺盪,增加流體介面的接觸面積,進而加強流體折疊 (folding) 效應,提升混合 效率。由流場可視化結果和混合量化可發現,導入圓角設計與縮小凹面半徑,雖能增加由Görtler 渦漩所引起的不穩定性,但對於提升混合效率並沒有太大幫助。但是,若在入口匯流處加入突擴 設計,可有效降低轉變為紊流型態的 Reynolds number,對於凹面半徑為300 μm與450 μm之微流振 盪器,在Reynolds number為70時即可發生流場振盪,使流體在擋體前方凹面區內即有良好的混合。
此外,由頻譜分析得知,尾流振盪的頻率會隨入口速度的增加而增高,且對於不同幾何形狀設計 的微流振盪器,入口速度與振盪頻率皆呈線性關係。經由無因次分析可發現,Strouhal number在不 同Reynolds number及幾何形狀設計下維持常數,即St = 3.8 × 10-5。
關鍵字: 微混合器、暫態電滲流、混合效率、流體穩定性、微流振盪器、Coandă效應、自持式振 盪
Abstract
In this project, we have designed various micromixers utilizing different pulsatile flow mechanisms.
During the first year, we focused on the design and fabrication of the active diverging-type micromixers.
The influences of phase difference in mixing performance were simulated through numerical models.
Moreover, a twin-cam assembly was built in-house to provide the sinusoidal pressure to the diverging-type micromixer. By utilizing fluorescence technique with dichroic filter, mixing performance was quantified and flow visualization in the micromixers was achieved. The half-angle of the diverging-type micromixer was fixed at 25° for the numerical simulation. The boundary conditions at two
inlets were time-varying pressures, which were composed of a sinusoidal oscillation and a constant shift.
The amplitude P0 and frequency f of the oscillation was fixed at 500 Pa and 100 Hz, while the superimposed shift was 250 Pa. From the numerical results, the impacts of flow evolution on concentration distribution were discussed. We found that liquid stretching and folding were most prominent when the phase difference at the two inlets was π (antiphase). Consequently, best mixing was achieved with a mixing index (MI) of 0.6. The PDMS based micromixers were fabricated from a SU-8 master. During the experiments, the diverging-type micromixer was actuated by the sinusoidal pressure generator. The working fluids used were Rhodamine 6G (fluorone dye) and alcohol. The range of half-angle of the diverging-type micromixer was 0° to 55°, and the phase difference of the driven pressures was 0 (in-phase), 0.25π, 0.5π, 0.75π, π (antiphase), 1.25π, 1.5π, 1.75π. The experimental results suggested that best mixing was accomplished at θ = 20° with a phase difference of 0.75π.
In the second year, we focused on the improvement of the actuation mechanism for the active diverging-type micromixers. Using an ITO substrate, the micro electrodes were made to provide the necessary electroosmotic actuation. By adding dye to the working fluid, we quantified the mixing performance and accomplished flow visualization in the micromixers. To fabricate the micro-electrodes, a standard lithography was performed on a photoresist layer that served as the etching mask. During the experiments, the diverging-type micromixer was actuated by transient electroosmotics. A high-voltage-power-supply module was assembled in-house to provide two types squarewave output, unipolar and bipolar. The working fluids used were diluted 1:2 Chromium complex dye and alcohol. The tested half-angles of the diverging-type micromixer were 0°, 5°, 20°, 35°, 50°, the superimposed pressure heads were 1 mm, 5 mm, 10 mm, and the phase differences of the driven voltages were 0 (in-phase), 0.25π, 0.5π, 0.75π, π (antiphase). The experimental results suggested that best mixing was accomplished at θ = 0° with a phase difference of 0.5π and a superimposed pressure head of 1mm under bipolar actuation.
In the third year, we take a different approach and present a microfluidic oscillator design that employed an impinging jet on a concave surface to enhance the microscale mixing process. The Coandă effect along with the Görtler instability proved to incite sustainable flapping motion beyond the obstacle and mixing was profoundly improved. From the flow visualization results, four different regimes were identified and we found that the primary enhancement of mixing performance was always linked to the transition of flow regime. Moreover, incorporating a sudden-expansion confluence provoked flow three-dimensionality and elevated the mixing level significantly at low Reynolds numbers. For a Reynolds number as low as 70, the tail flow behind the concave obstacle successfully exhibited a periodic oscillation and Hopf bifurcation was induced, leading to a drastic augmentation in the time-average mixing efficiency. By utilizing the spectrum analysis, the characteristic frequency of flapping motion was found to vary linearly with the throat velocity, resulting in a constant Strouhal number of 3.8 × 10-5.
keywords: micromixer, flow stability, unsteady electroosmotic flow, mixing efficiency, microfluidic oscillator, Coandă effect, self-sustained oscillation
II. 前言
利用微機電製程技術 (microfabrication),實驗室型生物晶片 (lab-on-a-chip)可將樣品處理、混 合、稀釋、電泳、層析分離、染色或檢測等獨立系統整合在一微型晶片上。在微流道建構而成的 網路內驅動樣品流體進行分析,所需的樣品與試劑體積僅為pico (10-12)或nano (10-9)公升之冪次 方,且具分析速度較快,數據再現性較佳等優點。其中,微型混合器受到尺寸縮小的影響,微流 道內的Reynolds number與Péclet number皆偏低[1],仍屬於層流 (laminar flow)的範圍,而主要混合 機制為擴散作用,造成混合效率極差。
一般而言,微型混合器的類型可分為主動式微混合器 (active micromixer)及被動式微混合器 (passive micromixer)兩種[2],主動式微混合器是透過外加壓力、溫度、電磁、電泳或聲波等力場的 方式產生流場的擾動,進而增強流體的混合效應;而被動式微混合器則是以利用並聯層疊(parallel
lamination)、串聯層疊(serial lamination)、混沌對流 (chaotic advection)等微流道設計或液滴的方式,
使流體間的接觸面積增加,提升混合的效率。在主動式微混合器中,Huang 等[3]利用電場超越臨 界電壓時所產生的電動不穩定性 (electrokinetic instability)特點,激發逸放流 (shedding flow),以增 進微流道內混合效率。由實驗結果顯示,十字型微流道在電場為500 V cm-1時,混合效率可達80%;
若將於十字型微流道的下游流道加入漸縮與漸闊變化,則僅需電場300 V cm-1,混合效率即可達到 96%。Glasgow 等[4]使用數值模擬的方式,探討脈衝流 (pulsed flow)對T型微流道內混合效率的影 響。在兩入口的流量相位差固定為0.5π的條件下。Glasgow 等[4]發現Strouhal number與振盪體積比 PVR (pulse volume ratio, 定義為振盪體積與匯流處流道體積的比值)為影響混合效率的主要參數。
當Strouhal number與PVR越高時,混合效率越佳。2005年Lin 等[5]利用電滲效應 (electroosmosis) 驅動流體進入玻璃Y型微流道,藉由改變電壓頻率控制表面zeta potential的梯度,改善微流道內的 混合。由三電容模型 (three-capacitor model)預測出在電壓頻率為0.5 Hz時,可得最佳混合效率。Lin 等[5]亦利用蛋白質BAPNA (N-benzoyl-L-arginine-p-nitroaniline)與酵素trypsin進行混合實驗,蛋白質 會被trysin分解成N-benzoyl-L-arginine與p-nitroaniline。若以光電倍增管 (photomultiplier tube)偵測訊 號強度來量化混合效率,當混合越好時,訊號越低,未混合時,則訊號越強。由實驗結果顯示,
改變表面zeta potential的梯度後,訊號皆低於未混合時之值。Coleman 等[6]提出了一種新的混合方 法,藉由電滲流不斷的交替注入欲進行混合的二種流體 (sequence injection)產生軸向的混合,再連 接至一漸闊區域造成流體的分散,以促進混合效率。Coleman 等透過模擬的方式,比較在其設計 的兩種製造sequence injection之入口結構下,不同的注射輪替頻率以及漸闊區域的幾何尺寸對混合 的影響。由其結果得知,提高注射輪替頻率有助於提升混合,在流速為 1 mm s-1下,僅需2.3 mm 的流道長度即可達到99%的混合效果。
微流振盪器 (microfluidic oscillator) 是透過改變流道幾何形狀造成流體振盪,若利用此流體振 盪的特性作為微流混合應用,可將微流振盪器歸類為被動式微混合器的一種。在微觀尺度下,
Gebhard 等[7]利用數值模擬,比較不同幾何外形的微噴嘴設計及回饋流道長度,對於回饋型振盪 器之振盪頻率的影響。其中微噴嘴分為突縮型、漸縮型與孔口型三種,回饋流道長度分別為655 μm、855 μm與1,055 μm。以噴嘴寬度(30 μm)作為特徵長度,工作流體為水。當入口壓力為200 kPa 時,模擬結果顯示振盪頻率不會隨回饋流道長度改變。當入口壓力由50 kPa增加至300 kPa時,突 縮型與孔口型噴嘴設計之微振盪器的入口流速分別為0.2 m s-1至0.6 m s-1與0.4 m s-1至1.3 m s-1,振 盪頻率分別為100 Hz至225 Hz與125 Hz至350 Hz,且振盪頻率與入口流速皆呈線性關係,對於突縮 型與孔口型噴嘴設計之微振盪器,Strouhal number分別為0.015與0.009。Yang 等[8]將回饋型振盪 器應用於微流量計與微混合器,在微振盪器中加入大收縮比 (aspect ratio)的噴嘴、突擴入口與不對 稱回饋流道的設計,其中大收縮比的微噴嘴可增強Coandă效應,而突擴入口與不對稱回饋流道則 有 助 於 誘 發 流 體 不 穩 定 性 , 增 強 振 盪 效 應 。 微 振 盪 器 利 用SU-8 製 作 母 模 , 再 以 PDMS (polydimethylsiloxane) 翻模而成。流場可視化實驗使用的工作流體為酚酞(phenolphthalein) 和 NaOH,以噴嘴寬度(16 μm)作為特徵長度。模擬與流場可視化結果顯示,當Reynolds number介於1 至100時,在反應腔室內皆會發生週期性的渦漩振盪。振盪頻率介於0.1 Hz至1.1 Hz,振盪頻率與入 口流速呈線性關係,而Strouhal number為3×10-6。另外,利用螢光共振能量傳遞 (fluorescence resonance energy transfer) 方法檢測兩種螢光蛋白質的生化反應,發現利用微流振盪現象可使反應 速率增加80%。Lee 等[9]將凹面型振盪器應用於微流量計,在石英晶圓上利用濕蝕刻的方式製作 出兩種不同V型擋板角度(70°與110°)的微流量計和電阻式感測器,以量測振盪頻率。流場可視化使 用的工作流體為水和染料,以噴嘴與V型擋板間距(2,790 μm與1,440 μm)作為特徵長度。流場可視 化結果顯示,在Reynolds number介於0.2至5.4時,當鞘流 (sheath flow) 射入V型擋板表面後即產生 週期性的振盪行為。此外,在射流入口流速介於0.15 m s-1至3.75 m s-1時,V型擋板角度為70°與110°
之微流量計的振盪頻率分別為0.02 Hz至0.16 Hz與0.02 Hz至0.32 Hz,振盪頻率與射流入口流速皆呈 線性關係,且兩種V型擋板角度之微流量計的Strouhal number皆為0.12。
本子計畫以三年時間,針對子計畫一所發展的新型DNA檢測技術應用,發展一融合被動式與 主動式混合優點之嶄新微混合元件,由於漸闊型微流道具有流體指向性 (flow rectification)的特 徵,在振盪式擾動下,不僅有助於混合,更兼具了輸送流體的功能。故在第一年中,利用模擬及
實驗的方式,探討漸闊型微混合器之半角與振盪制動源的相位差對於混合效率之影響。在第二年 時,我們嘗試將電滲流驅動與漸闊型微混合器進行結合,透過實驗的方式,探討在振盪電壓源與 不同半角的微混合器中,由電滲流驅動所造成的混合現象與效率。在第三年中,我們利用自持性 的流體振盪來增強微流混合,提出一凹面型微流振盪器,參考Huang 和Chang[10]在巨觀下的設 計,搭配Yang 等[11]所提出的突擴入口,透過混合量化、流場可視化與頻譜分析,探討不同幾何 外形設計之微流振盪器對振盪頻率與混合效率的影響
III. 結果
1. 壓力脈動式微混合器
主動式微混合器之結構設計分成漸闊型、漸縮型與直管三種。利用PDMS做為主動式微混合器 之製作材料,藉由正弦壓力產生機構輸出隨時間振盪的壓力,再加入疊加壓力來驅動工作流體,
以觀察兩工作流體在漸闊型、漸縮型與直管微混合器內混合的情形。
漸闊型微混合器之結構如圖一所示,可分為T型區、漸闊區及出口區。T型區上下兩入口流道 寬度90 μm,長度皆為2,500 μm,二入口之流體接管處半徑為550 μm。匯流後之流道寬度為180 μm,
長度為300 μm。出口之流體接管處半徑為1,800 μm。漸闊區長度為1,200 μm,半角為5°、10°、15°、
20°、25°、30°、35°、40°、45°、50°、55°共11種。出口區長度Lo與寬度wo隨漸闊區半角大小而改 變。漸縮型微混合器之結構如圖二所示,同樣分為T型區、漸縮區及出口區。
圖一 漸闊型微混合器
o
圖二 漸縮型微混合器
regeneration unit
motor driver power supply cam
dynamic pressure source
follower
device
computer motor
photoelectric sensor to generate timing signal
outlet
CCD camrea dichroic cube excitation filter
nm
emission filter nm objective 5X
Xenon lamp Fluid B reservoir
Fluid A reservoir
圖三 濃度場量化量測實驗設置
混合量化之實驗架構如圖三所示,主要組成為正弦壓力產生機構、倒立式顯微鏡、直流電源供 應器、光電感測器及CCD攝影機。在本研究中,使用正弦壓力產生機構產生隨時間呈正弦變化之 壓力源來驅動工作流體,利用直流電源供應器(power supply, Good Will, GPC-6030D)輸出電壓控制 馬達轉速,可調整壓力振盪頻率。進行實驗時,使用的壓頭振幅固定為50 mm,且在完成壓力平衡 校正後,將燒杯內的工作流體液面再提高10 mm,作為疊加壓頭。因此,最高壓頭為60 mm,所對 應之壓力為492 Pa,最低壓頭為-40 mm,所對應之壓力為-328 Pa。進行濃度場量化量測實驗時,
壓力振盪頻率固定為0.25 Hz,兩凸輪之相位差則共有0 (in-phase)、0.25π、0.5π、0.75π、π
(anti-phase)、1.25π、1.5π及1.75π八種變化。混合量化實驗主要是利用倒立式顯微鏡所拍攝的濃度 場隨時間衍化的影像作為量化依據,再搭配濃度場可視化,利用雷射掃瞄共軛焦顯微鏡系統高對 比影像的特色,紀錄動態壓力下微混合器內濃度場隨時間的衍化,以探討微混合器內之混合機制。
微混合器量化所選定之區域如圖四所示,擷取倒立式顯微鏡所獲得之影像,取漸闊區或漸縮區內 之灰階值進行計算。
圖四 (a)漸闊型微混合器 (b)漸縮型微混合器 (c)直管微混合器,
混合量化區域示意圖
1.1 漸闊型微混合器
圖五為主動式漸闊型混合器在相位差0.5π時之濃度場隨時間衍化。在 t/T = 0.12 與 0.23 時,殘 留在入口1 內的低濃度流體被推送至漸闊區的另一邊。t/T = 0.6 至 0.73 時,酒精開始由入口 2 流 入入口1 及漸擴區。在 t/T 為 0.85 時,受到壓力變化的影響,流體由出口逆流回漸擴區。圖六為 主動式漸闊型混合器在相位差π時之濃度場隨時間衍化。在 t/T = 0.12 至 0.48 時,殘留在入口 1 內 的低濃度流體被推送至漸闊區與入口2 內。在 t/T = 0.6 至 0.85 時,殘留在入口 2 內的高濃度流體 被推送至漸闊區與入口1 內。在 t/T = 0.98 時,酒精由入口 2 往匯流區方向流動。 比較圖五與圖 六可發現,當兩流體的壓力制動源產生相位改變時,將會使工作流體受到壓力變化的影響,而造 成截阻作用。此外,當相位差為0、0.25π、0.5π、1.25π、1.5π及 1.75π時,可發現兩工作流體之接 觸介面產生明顯的不穩定現象。
t/T = 0.12
t/T = 0.35
t/T = 0.85
= 25°, = 0.5
= 25°, = 0.5
= 25°, = 0.5
= 25°, = 0.5
300 m hA= 44.2 mm
hB= -26.45 mm
300 m
300 m
300 m
300 m hA= 50.45 mm
hB= 39.39 mm
hA= -19.38 mm
hB= 50.45 mm t/T = 0.60
hA= -30.45 mm
hB= -19.38 mm
= 25°, = 0.5 hA= 59.60 mm
hB= 3.73 mm t/T = 0.23
300 m
= 25°, = 0.5 hA= 16.26 mm
hB= 59.6 mm t/T = 0.48
300 m
= 25°, = 0.5 hA= -39.60 mm
hB= 16.26 mm t/T = 0.73
300 m
= 25°, = 0.5 hA= 3.73 mm
hB= -39.60 mm t/T = 0.98
60 mm 10 mm
-40 mm
4s
60 mm 10 mm
-40 mm
4s 60 mm
10 mm
-40 mm
4s 60 mm
10 mm
-40 mm
4s 60 mm
10 mm
-40 mm
4s
60 mm 10 mm
-40 mm
4s 60 mm
10 mm
-40 mm
4s 60 mm
10 mm
-40 mm
4s
(a)
(c)
(e)
(g)
(b)
(d)
(f)
(h)
圖五相位差為0.5π,θ = 25°,t/T 為 0.12 至 0.98
圖六 微擴散器內的濃度場衍化,相位差為π,θ = 25°
圖七為主動式漸闊型微混合器內不同相位差與漸闊半角下,CV 值的等高線圖。由實驗結果可 發現,當半角為20°,相位差為 0.75π時,其對應之 CV 值最小,約為 0.04,此為混合最佳的情況,
即圖七中的斜線區域。此外,當相位差為0 (inphase)時,半角對於 CV 值幾乎無任何影響,混合效 果普遍不佳。但當相位差增至 0.25π時,混合效果獲得大幅改善,使 CV 值遽降。在半角小於 15°
時,CV 值隨半角增加而降低。尤其是直管 (θ = 0°)及半角為 5°的漸闊型微混合器,其混合效果很 差。而當半角大於20°時,半角對 CV 值之影響降低,在相位差介於 0.75π至 1.75π時,CV 值皆維 持0.1 至 0.2 左右。
圖七 在主動式漸闊型微混合器內,半角與相位差對 CV 值之影響
1.2 漸縮型及直管微混合器
由主動式漸縮型微混合器之可視化結果可發現,在各相位差條件下,流體間之接觸介面皆無出 現流體不穩定的現象。反之,對於直管微混合器而言,在相位差為0、0.25π、0.5π、0.75π、1.25π、
1.5π及 1.75π時,工作流體之間的接觸介面皆產生流體不穩定的現象。由 Sanhu 和 Govindarajan [12]
的線性分析發現,在穩流條件下,直管內不論Reynolds number 的大小流場皆呈穩定,但對於漸闊 型的流道,即使其漸闊半角只有1.5°,在 Reynolds number 約 150 時,即會產生流體不穩定的現象,
進入紊流。Hamadiche 等[13] 由非線性分析亦得到類似的結論,對於 Jeffery-Hamel 流而言,流場 不穩定初始的臨界Reynolds number 會隨半角增加而大幅下降。此外,對於直管而言,在壓力振盪 流的情況下,在頻率極高或極低時,臨界Reynolds number 會比穩流時為小。故可知對於主動式微 混合器而言,可改變其半角,藉由激發流體不穩定現象來加強折疊拉伸效應,進而提高混合效率。
圖八為主動式漸縮型微混合器內對於不同相位差與漸縮半角下,CV 值的等高線圖。由實驗結 果可發現,當漸縮半角為-30°,相位差為 0.75π時,其對應之 CV 值最小,約為 0.09,此為混合最 佳的情況,即圖八中的斜線區域。此外,當相位差為0 (inphase)及π (antiphase)時,半角對於 CV 值 己幾乎無任何影響,混合效果皆不佳,CV 值約為 0.4 至 0.5 內。但在其他相位差時,混合效果皆 有改善。當半角大於-5°時,CV 值隨半角的增加而增加。在相位差大於為 1.25π時,半角對於 CV 值影響及小,CV 值皆介於 0.1 至 0.2 之間。
圖八 在主動式漸縮型微混合器內,半角與相位差對 CV 值之影響
綜合以上結果,可得知在同相制動下,不論半角大小混合效果皆相當差,若改變制動壓力的相 位差,可大幅提升混合效率,尤其在搭配半角變化後混合效果更佳。由流場可視化結果可知,漸 闊型微混合器中會產生流體不穩定的現象,有助於混合作用。故漸闊型微混合器的最佳CV值較漸 縮型微混合器為小。
2. 電滲式驅動漸闊型微混合器
對於漸闊型混合器,改變驅動方式,若要利用動態電滲式驅動,則需另外製作銦錫氧化物
(indium tin oxide, ITO)的電極基板。電極基板與電滲式漸闊型微混合器之元件尺寸如圖九所示。
R120 0
R40 0
6000
unit:m m
1200 364
5 400
0
627
6 2
1200
圖九 ITO電極及電滲式漸闊型微混合器幾何尺寸
在本研究中,我們分析不同驅動模式、疊加壓頭、制動電壓的相位差與漸闊半角對電滲式微混 合器內濃度場衍化的影響。其中,驅動模式分為unipolar actuation與bipolar actuation二種,疊加壓 頭有1 mm、5 mm與10 mm三種,相位差有0、0.25π、0.5π、0.75π與π五種,漸闊半角有0°、5°、20°、
35°與50°五種。
2.1 電滲流驅動原理
受到離子吸附或解離作用影響,一般在固液介面間會產生表面電荷,使液體內的異性離子受到 吸引而接近壁面,同性離子則被排斥而遠離壁面,造成接近壁面處異性離子的濃度高於同性離子,
產生電雙層 (electric double layer, EDL),如圖十所示[14]。電雙層可分為二個區域:一為固定層 (compact layer),長度約 5 nm,其間異性離子被吸附於壁面不具移動性;二為擴散層 (diffusion layer),其範圍的尺度介於 1 nm 至 102 nm 之間,其間受壁面所帶表面電荷影響仍以異性離子居多,
離子具有移動性,異性離子濃度隨離壁面距離增加而急遽下降。此外,擴散層長度一般定義為電 雙層的特徵長度,稱為Debye length (λD),而固定層與擴散層介面之電位稱為 zeta potential (ζ)。
在本研究中,微混合器的材質ITO玻璃基板與PDMS皆為矽基材料,經由氧電漿進行表面處理 後,表面會產生矽醇基 (SiOH),在通入流體後解離成SiO-與H+,其中的H+會溶於流體中,造成 流體內正電荷離子數多於負電荷,而流道表面帶有負電荷離子 (SiO-),會吸引流體中的正電荷離 子在接近壁面處形成電雙層。
potential
圖十 電雙層示意圖
若於流道兩端外加一電場,除固定層中之離子因吸附於壁面不受外加電場影響外,流體中的正 負電荷分別往相反電性之電極移動。擴散層中因正電荷離子濃度較高,會朝負極移動,加上流體 黏滯性所造成的剪力,電雙層外的流體亦會往負極移動。造成流體呈現平板狀流動 (slug flow)而 非傳統壓力流所造成的拋物線狀流場,速度曲線如圖十一所示,此種流動現象稱之為電滲流動
(electrosmotic flow, EOF)。
圖十一 電滲流示意圖
本實驗所使用的混合量化實驗架構如圖十二所示,流體驅動源由使用二台高壓電源供應器 (high voltage power supply, Ultravoltage, 6C24-NP250)作為微混合器內不同工作流體之電滲驅動 源,輸出方式有unipolar與bipolar二種輸出形式,其電路設計如下所述。
(1) unipolar actuation:由數位類比訊號轉換卡搭配 LabVIEW 產生頻率 1 Hz,duty cycle 50%,電 壓振幅0.78 V 之方波訊號 A,經高壓電源供應器 (HVPS)提升為電壓振幅 1 kV 之方波電壓源,
電路中有由電容 (18 pF, 3 kV)與電阻 (1 kΩ, 1/4W)組成的保護電路,防止在短路時造成 HVPS 的損壞。電壓輸出範圍為0 至 1 kV,僅涵蓋正電壓區間。另外,藉由訊號 A 與 B 間的訊號延 遲控制高壓輸出時的相位差。
(2) bipolar actuation:由數位類比訊號轉換卡搭配 LabVIEW 產生頻率 1 Hz,duty cycle 50%,電壓 振幅1.55 V 的方波訊號 A 與分接至加法器電路得到偏壓 3.45 V 的訊號 A',二訊號經 HVPS 與 分壓電路提升為電壓振幅±1 kV 之方波電壓源,電路中有由二極體 (9 kV)、電容 (18 pF, 3 kV) 與電阻 (1 kΩ, 1/4W)組成的保護電路,防止在正負電壓轉換與短路時損壞 HVPS。電壓輸出範 圍為-1 kV 至 1 kV,涵蓋正負電壓區間。
此外,實驗中流體除透過電滲流驅動外,亦疊加入額外的壓力源。將液體儲存槽固定在Z-axis stage上,在完成壓力平衡校正後,利用Z-axis stage抬高儲存槽內液面,產生額外的疊加壓力驅動 流體,實驗共有1 mm、5 mm與10 mm三種壓頭高度。在實驗進行時,使用兩台高壓電源供應器產 生具相位差之方波電壓,以產生電滲流驅動工作流體進入微混合器中造成混合。實驗固定以頻率1 Hz之電壓源進行,藉以探討在unipolar與bipolar兩種驅動方式下,改變疊加壓頭、漸闊半角與制動 電壓的相位差對於流體混合的影響。工作流體則利用酒精 (台灣糖業股份有限公司, 95度)、染料 (1:2 Chromium complex dye)及鹽進行調配,分為流體A (95度酒精60 ml 染料17 mg 氯化鈉180 mg) 與流體B (95度酒精60 ml氯化鈉180 mg)二種。
computer
Z-axis stage
high voltage power supply
24 VDC input
device
outlet fluid A
reservoir
micropositioner CCD camera
fluid B reservoir
probe station lightbox
LabVIEW controlled DAC
圖十二 混合量化實驗架構示意圖 2.2 ME 隨時間的變化
在相同漸闊半角與疊加壓頭的條件下,ME值隨時間的變化如圖十三所示。由圖十三可發現,
以unipolar波形之電壓驅動工作流體,ME之變化趨於規律所花費時間,皆短於以bipolar波形之電壓 驅動時所需。相較於unipolar actuation在微混合器內的平均流速,bipolar actuation受負電壓區間造 成的反向驅動力影響,其平均流速較慢,需要較長時間由入口區流至出口區,使ME值變化趨於規 律的時間拉長。此外,在相同驅動方式與漸闊半角的條件下,ME值變化趨於規律所需時間會隨疊 加壓頭提高而縮短,如圖十四所示。以unipolar波形之電壓驅動工作流體,在漸闊半角為0°,疊加 壓頭為1 mm時,ME值變化趨於規律約需時5秒;當疊加壓頭為5 mm時,ME值變化趨於規律需時 縮短為1.5秒,在疊加壓頭為10 mm時,ME值變化趨於規律需時再縮短為1秒。這是因為當疊加壓 頭提高,微混合器內流速受壓力影響而加快,縮短由入口區流至出口區所需時間,亦減低了二流 體間的擴散質傳,因此除了縮短ME值變化趨於規律的時間,亦造成ME值的下降。若改變漸闊半 角,在相同驅動方式與疊加壓頭的條件下,ME值變化趨於規律所需時間會隨漸闊半角增大而增 加,如圖十五所示。以unipolar波形之電壓驅動工作流體,在漸闊半角為50°,疊加壓頭為5 mm時,
ME值變化趨於規律約需時3秒,明顯比漸闊半角為0°時需要更長的時間以趨於穩定。這是因為較大 的漸闊半角,受漸闊區截面積增大影響,造成微混合器內流速減慢,拉長由入口區流至出口區所 需時間,亦增加ME值趨於規律所需之時間。
圖十三 unipolar與bipolar actuation 下ME值隨時間之變化
圖十四 不同疊加壓頭下,ME隨時間之變化
圖十五 對於不同漸闊半角的微混合器內,ME值隨時間之變化 2.3 相位差與漸闊半角對混合效率之影響
圖十六為在不同相位差與不同漸闊半角的微混合器內,疊加壓頭為1 mm時,unipolar制動下ME 值的等高線圖。由圖十六可發現,當漸闊半角為50°,相位差為0.75π時,其對應的ME值最高,約 為0.65,即為 unipolar制動時混合最佳的情況,如圖十六中斜線區域所示。此外,當相位差為同相,
漸闊半角小於20°時,ME值隨半角增加而下降,但半角若大於20°時,ME值反隨半角增加而上升。
當相位差由同相增加至0.75π時,無論半角大小皆對混合有明顯增進,相較於相位差為同相時,相 位差為0.75π時的ME值平均提高78%。
圖十六 在 unipolar actuation、hDC = 1 mm 時,在電滲式漸闊型微混合器內,
半角與相位差對混合效率ME的影響
Phase difference ()
0.7
0.7
0.7
0.7 0.7
.70
0.7 0.6
0.6
0.6 0.6
0.5 0.4
0.5
圖十七 在 bipolar actuation、hDC = 1 mm 時,在電滲式漸闊型微混合器內,
半角與相位差對混合效率ME的影響
圖十七為在不同相位差與不同漸闊半角的微混合器內,疊加壓頭為1 mm時,bipolar制動下ME 值的等高線圖。由圖十七可發現,當漸闊半角為0°,相位差為0.5π時,其對應的ME值最高,約為 0.8,即為 bipolar制動時混合最佳的情況,如圖十七中斜線區域所示。此外,對於不同漸闊半角的 最佳混合情況,皆出現在相位差0.25π至0.75π之間,這是因為在相位差為同相時,缺少在二入口處 由垂直流體介面電場所造成的電滲不穩定現象;而在相位差為反相時,在二入口處受到垂直介面 電場作用的時間最長,但此時不同流體依序進入漸闊區內,反而缺乏橫向混合的機制。因此在相 位差為同相或反相時,無法達到最佳混合。而在相位差為0.75π時,各半角的ME值皆很高,說明
不論漸擴半角大小,相位差為0.75π可提供穩定的混合效果。
綜合結果可發現,電滲式漸闊型微混合器內主要有二種混合機制,即電滲流的不穩定性與逆流 時所產生的流體層疊,滲流的不穩定性為若對導電率 (electrical conductivity)相異的二工作流體所 形成之介面,施加一垂直於該介面的電場,不論是使用直流或交流電場,只要達到一定電場強度,
皆可造成流體介面的不穩定現象。此外,當在二入口以非同相的電壓驅動時,受到相位差的影響,
在特定時間會出現流體由一入口直接流入另一入口的現象。受此逆流現象而殘留在另一入口流道 內的流體,會與另一入口所通入的工作流體產生混合,並在下個時間點進入微混合器內,造成流 體的層疊效應,增加流體間橫向的混合。
3. 凹面型微流振盪器
除主動式微混合器外,我們亦嘗試設計一微流振盪器,利用射流衝擊一圓形凹面所引起的流體 不穩定性,造成尾流的自持性橫向擺動,應用在增強微流混合效應上。當兩流體匯流之後,進入 漸擴區之射流 (jet) 會引起 Coandă 效應,使流體產生偏折現象。而偏折之流體衝擊圓形凹面後改 變流動方向,沿著擋體流動時會受離心力影響而改起二次流 (secondary flow),稱為 Görtler 渦漩 (Görtler vortices)。受到射流偏折的影響,在流經擋體側面二流道時,即有兩邊流率不同的現象,
加上Görtler 渦漩所引起的不穩定性,即會在擋體後方對尾流產生間歇而交替性的衝擊,使之隨時 間橫向擺盪。
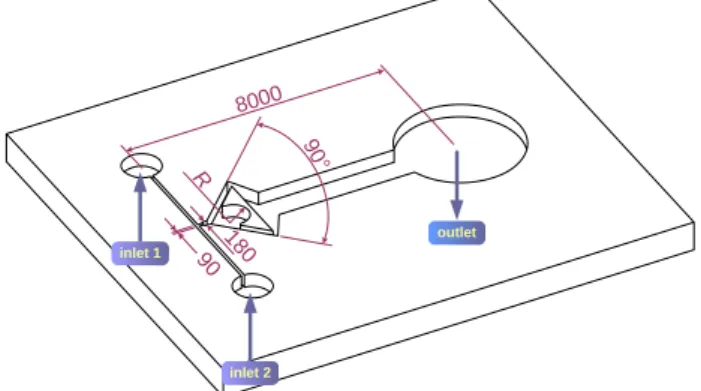
圖十八 微振盪器上視圖
本研究所設計之微流振盪器如圖十八所示,匯流後之流道設計分成兩種,一為直管類型,一為 突擴類型。突擴類型的匯流後流道寬度由90 μm 經 90°轉角擴張至 180 μm,而直管類型匯流後流 道寬度則維持180 μm。漸擴區的長度為 1340 μm,半角為 45°,在其中央放置圓形凹面擋體,凹面 擋體的轉角處,有銳角及導圓角兩種設計。銳角類型的擋體凹面半徑圓心位置與匯流處距離固定 為360 μm,凹面半徑有 300 μm、450 μm、600 μm 三種,且凹面弧長會隨著擋體半徑增大而增加;
導圓角類型的凹面半徑有 300 μm、450 μm 二種,凹面圓心位置與匯流處距離分別為 560 μm 與 760 μm,圓心位置由以下條件所決定:以擋體側壁與凹面延伸的交點和凹面圓心連線,將此線與 擋體側壁的夾角固定為111°,再將凹面側壁的轉角處導入半徑為 60 μm 之圓角。與銳角類型相比,
圓角類型的凹面弧長大幅增加。下游流道區在擋體後方先以60°半角漸縮,漸縮區長度為 490 μm,
再接一寬度為1,162 μm 之矩形流道,微流道由入口圓心的至出口圓心長度為 8,000 μm。
圖十九 實驗架構示意圖
在本研究中所使用的實驗架構如圖十九所示。在流場可視化的部分,利用注射器泵抽拉,使加 入質點粒子的工作流體由儲存燒杯內流入微流振盪器中,以兩把532 nm 的 DPSS 雷射作為光源拍 攝微流振盪器內之徑線,再搭配高感光度攝影機與電腦紀錄流場可視化之影像。混合量化的部分,
則取擋體後方的區域,利用自行撰寫的Matlab 程式進行分析。
3.1 混合效率
圖二十為在不同Reynolds number情況下,凹面半徑 450 μm,直管入口與突擴入口之微混合器 內濃度場衍化的比較。由圖二十可發現,對於微流振盪器而言,存在一臨界Reynolds number (Rec),
當Reynolds number超過此臨界值時,即會產生流體振盪現象,大幅增加其混合效率。此外,我們 亦發現,加入突擴入口設計的微流振盪器其Rec普遍低於直管入口設計的微流振盪器,在突擴的情 況,可將臨界Reynolds number減少至70。對於直管的微流振盪器,在Re = 100情況下混合狀況很差,
而當Re增加至150時,可以發現在凹面檔體內有高濃度的流體被捲入原本低濃度的區域,使得ME 略優於Re = 100時的情況。而當Re > 300時,流體的振盪變得非常劇烈,因此ME值也明顯的提昇。
此外,對於突擴入口設計而言,在Re = 100即已達到良好的混合,這是因為突擴入口設計可大幅增 加流體的不穩定性,進而促進低Reynolds number時的混合效率。
圖二十 凹面半徑為450 μm 在不同Reynolds number情況下,突擴入口對濃度場衍化的影響
圖二十一為不同凹面半徑對於時間平均混合效率 ME 值的影響。由圖二十一可發現,當 Reynolds number 超過一特定值時,ME 值會有大幅的提升,與流場可視化的結果進行交叉比較後,
我們發現此一特定值的Reynolds number 通常亦反映出流場型態的轉變。此外,對於直管入口設計 的微流振盪器而言, ME 值隨 Re 增加而緩和上昇,並沒有明顯突升的情況。然而,對於突擴入 口設計的微流振盪器而言, ME 值在低 Reynolds number 時會有明顯的大幅上昇。由圖二十一(a) 可發現,凹面半徑為300 μm 及 450 μm 的微流振盪器,在 Re 介於 100 與 150 之間時, ME 隨 Re 緩慢的上升,當 Re 增至 200 至 350 時, ME 值明顯大幅上升至 0.7,故 Reynolds number 的臨界值 約為250。當凹面半徑增為 600 μm 時,在 Re < 300 情況下, ME 值皆小於 0.3,直到 Re 達 310,
即Reynolds number 的臨界值時, ME 值才快速上升。在 Re = 350 時, ME 值達 0.62。比較圖二十 一(a)和圖二十一(b)可發現,在入口加入突擴設計後,可以有效的降低臨界 Reynolds number。對於 凹面半徑為300 μm 和 450 μm 的微流振盪器,在入口加入突擴設計後,Re = 50 時 ME 值雖只有 0.25,但當 Re = 100 時 ME 值即大幅上升至 0.5。同樣地,對於凹面半徑為 600 μm 的微流振盪器,
加入突擴設計可使臨界Reynolds number 大幅下降至 150。由混合量化結果可發現,當擋體的凹面
半徑為300 μm 和 450 μm 時,不論是直管入口或是突擴入口設計,其混合效率皆優於凹面半徑為 600 μm 之設計。
Re
0 100 200 300 400 500
ME
0.0 0.2 0.4 0.6 0.8 1.0
R300S R450S A600S
(a) straight confluence
Re
0 100 200 300 400 500
ME
0.0 0.2 0.4 0.6 0.8 1.0
R300EX R450EX A600EX
(b) sudden-expansion confluence
圖二十一 微流振盪器在(a)直管入口和(b)突擴入口設計下,Re對 ME 的影響
3.2 流場特徵
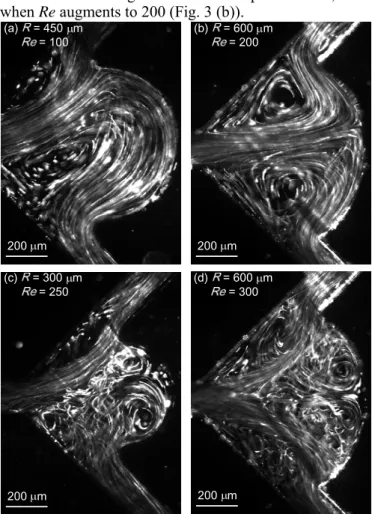
圖二十二為不同設計的微流振盪器內之流場可視化結果。由圖二十二可發現,擋體的凹面半徑 為450 μm,具突擴入口的微流振盪器,在Re = 100時凹面上有一停滯點,且受Coandă effect影響,
停滯點明顯偏離中心線,使凹面內出現單一渦漩。隨Re增加,此停滯點開始在凹面表面隨時間橫 向移動,近一步提升 ME 值。反之,在擋體凹面半徑為600 μm,具突擴入口的微流振盪器內,當 Re = 100時,由於其曲率半徑較大,且凹面內的區域較小,所產生的離心力較弱,並沒有觀察到 Görtler不穩定性的發生,停滯點只有些微的偏轉,凹面的腔體內存在兩個旋轉方向相反的渦漩對。
在Re小於150時, ME 值很低。隨著Reynolds number的增加,流場不穩定性隨著微流振盪器的設計 而有不同的流場特徵。對於凹面半徑為450 μm圓角設計和凹面半徑為600 μm銳角設計的微流振盪 器,在較大的Reynolds number時,凹面腔室內除了兩個旋轉方向相反的渦漩對外,還多了兩個二 次流的渦漩對,出現在擋體凹面附近,將原有的兩顆大渦漩推擠至側壁。此時,流場極不穩定,
所產生的自持性橫向擺動,可進一步提升混合效率。在凹面半徑為450 μm的微流振盪器中加入突 擴入口設計,在高Re時會在凹面腔室內出現兩顆旋轉方向相同,彼此相連的渦漩對,此種流場特 徵極不穩定,使混合效率顯著提升。
圖二十二 流場可視化結果
為了進一步了解微流振盪器內的流場型態,我們將流場可視化的結果分成四種型態 I、II、III 和IV,如圖二十三所示。在流場可視化中所觀察到的流場型態,需利用奇異點 (singular points)分 析,判斷流場是否符合運動可行性(kinematically possible)的條件。Hunt 等[15]提出合理的 2D 流場 皆須滿足式(3)。
1 1
' ' 1
2 2
N N S S c
⎛ + ⎞ ⎛− + ⎞= −
⎜ ⎟ ⎜ ⎟
⎝
∑ ∑
⎠ ⎝∑ ∑
⎠ (1) 其中∑
N代表流場節點 (nodes) 總和,∑
N'代表流場半節點 (half-nodes) 總和,∑
S代表流場鞍點 (saddles) 總和,
∑
S'代表流場半鞍點 (half-saddles) 總和,c 則由流場內部障礙物的數量及形 式所決定,本研究中的微流振盪器內含一凹面擋體,故 c 值為 2。本研究中所出現的四種流場型態 如圖二十三所示,其奇異點分析皆滿足式(3)。型態I為擋體凹面內有兩顆反向旋轉的渦漩,擋體後方壁面亦有兩顆反向旋轉的渦漩,而下游 流道轉角靠近壁面處各有一顆渦漩,彼此亦為反向旋轉。而型態I對應到所有設計的微流振盪器內 Re = 50的情況。隨著Reynolds number的增加,出口處的流場型態會轉變為凹面擋體後有一對渦漩 形成,而在轉角靠近壁面處出現分離的渦漩。型態I可再細分為IA、IB、IC三種,其中IA為凹面內 渦漩較對稱,流場穩定,凹面上的停滯點不隨時間改變,且下游流道沒有發生流體振盪現象;IB 為凹面內的兩顆反向旋轉的渦漩隨時間縮小擴大,並產生橫向振盪,使分離兩渦漩的停滯點沿凹 面橫向擺動;IC為凹面內有單顆渦漩隨時間在流向上振盪,但凹面上的停滯點不變,IB、IC在擋 體後方壁面處有兩顆反向旋轉的渦漩,下游流道皆受到轉角處兩側壁面渦漩影響而產生橫向振盪。
圖二十三 流場型態的分類
型態II 亦可細分為 IIA、IIB 二種,IIA 為除漸擴側壁所存在的兩顆大渦漩外,擋體凹面內出現
一對反向旋轉的小渦漩,並隨時間橫向振盪;IIB 為擋體凹面內出現一對反向旋轉的小渦漩,隨時 間橫向振盪,但漸擴側壁附近則因紊流而產生隨機方向與大小的eddy (渦旋)。型態 III 為擋體凹面 內僅存在單顆渦漩,漸擴側壁附近則因紊流而產生隨機方向與大小的 eddy,停滯點停留在擋體凹 面外側且不隨時間改變;型態IV 為擋體凹面內出現兩顆同向旋轉的渦漩,彼此相接,形成鞍點,
並隨時間在流向上振盪,漸擴側壁附近則因紊流而產生隨機方向與大小的 eddy,停滯點停留在擋 體凹面轉角處且不隨時間改變。在下游流道的流場,型態 II、III、IV 皆為擋體後方壁面處有兩顆 反向旋轉的渦漩,隨時間橫向振盪,而下游流道轉角靠近壁面處則出現兩種型態,彼此交替出現,
一為流道兩側各有單顆渦漩,另一為其中一側壁出現兩顆同向旋轉的彼此渦漩相接,形成鞍點。
這兩種型態皆會隨時間在流向上振盪,而擋體後方尾流則受到轉角處兩側壁面渦漩影響而產生橫 向振盪。
MEMEME MEME
0.0 0.2 0.4 0.6 0.8
1.0 IA IC IIB
A300S IIA
0.0 0.2 0.4 0.6 0.8
1.0 IA IB+IIA IIA
A450S IIB IB
Re
0 100 200 300 400 500
0.0 0.2 0.4 0.6 0.8
1.0 IB IIA IIB
A600S IA
Re
0 100 200 300 400 500
0.0 0.2 0.4 0.6 0.8
1.0 IA IB+III III
A600EX IB
0.0 0.2 0.4 0.6 0.8
1.0 IB IC IV
R300EX IA
ME
0.0 0.2 0.4 0.6 0.8
1.0 IB IC IV
R450EX IA
圖二十四 微流振盪器中Reynolds number 對流場型態與 ME 的影響,
紅色箭頭為臨界Reynolds number 之值
圖二十四為不同的微流振盪器中Reynolds number 對流場型態與 ME 的影響。由圖二十四可發 現,臨界Reynolds number 皆對應到流場型態的轉換 (transition)。在低 Reynolds number 時,不同 設計的微流振盪器內其流場型態皆較為對稱且呈穩態。對於直管入口設計的微振盪器(A300S、
A450S、A600S),在 Reynolds number 增加後,射流進入後會在側壁分離出一對渦漩,在擋體凹面 內出現兩個反向旋轉的渦漩,即轉變為型態II。進入型態 II 後 ME 大幅增加,流場型態為 IIA 時,
在凹面擋體內的渦漩出現橫向的振盪,進一步提升了微流振盪器內的混合能力。當Reynolds number
持續增加, ME 亦隨之升高,這主要是因為隨著 Reynolds number 的增加慣性力亦增強,使得流體 振盪的振幅變大。含直管入口設計的微流振盪器,一般其臨界Reynolds number 小於 300。
當微流振盪器中加入突擴入口的設計後(R300EX、R450EX、R600EX),由於流場型態的改變 使得混合效果變佳,這主要是因為在很低的Reynolds number 即能進入型態 IB,使得 ME 值急遽上 升,如圖二十四所示。比較直管入口與突擴入口的微流振盪器可發現,兩者之間有很大的不同。
加入突擴入口設計能使流場變得非常不穩定,在高Reynolds number 時會使流場型態轉變成 III 或 IV,即產生紊流的狀態,因此混合效率遠佳於直管入口設計的微流振盪器。
3.3 頻率響應
除流場型態與混合效率外,我們亦利用頻譜分析深入探討微流振盪器內流體振盪現象的頻率響 應。選取一時間區段呈穩定週期振盪的 ME 值,利用 FFT (fast Fourier transform),將訊號由時域轉 換為頻域,經由功率頻譜 (power spectrum) 分析呈現其振盪頻率特徵已得知流體振盪的主頻率,
並探討微流振盪器內入口流速對振盪頻率的影響。
圖二十五為不同幾何形狀設計之微流振盪器內入口速度與振盪頻率的關係。由圖二十五可發 現,當流體的入口速度增快,會使擋體後方尾流的振盪頻率增加。但銳角、圓角或突擴入口的設 計對流場的特徵頻率影響不大。而當入口速度由0.49 m s-1增至3.14 m s-1時,振盪頻率由0.1 Hz 增至0.6 Hz,且入口速度與振盪頻率呈線性關係,可由式(2)表示。
f = 0.188u + 0.005 (2) 利用最小均方根法 (least square method) 對入口流速與振盪頻率進行曲線擬合,所得之誤差為 0.013 Hz。
圖二十五 不同幾何形狀設計之微流振盪器內的入口速度 u 與振盪頻率 f 之關係,
空心、灰色實心及黑色實心的圖例分別代表銳角、圓角及突擴設計
振盪頻率的無因次化,由 Navier-Stokes 方程式中選取暫態項與慣性項之比可得到一無因次參 數 St (Strouhal number),定義如式(3)所示。
/ h
( / )
∂ ∂ ⋅
= =
∂ ∂
f D u t
St u u x u (3) 其中 f 為擋體後方尾流之振盪頻率、Dh為喉部寬度之水力直徑、u 為入口平均流速。當流場特 性由慣性力主導時,暫態所引起的力與慣性力成正比,即振盪頻率與流速呈線性關係,Strouhal number 維持一常數。 圖二十六為不同幾何形狀設計之微流振盪器內,Reynolds number 與 Strouhal number 的關係。由圖二十六可發現,銳角、圓角或突擴入口的設計對 Strouhal number 的影響不大,
當Reynolds number 由 50 增至 450 時,Strouhal number 皆維持常數 3.8×10-5,代表在微流振盪器內 的流場振盪行為主要由慣性力主導。且不同幾何形狀設計之Strouhal number 的誤差在±2.6%之內。
圖二十六 不同擋體半徑及設計之微流振盪器內,Reynolds number 與 Strouhal number 之關係圖,
空心、灰色實心及黑色實心的圖例分別代表銳角、圓角及突擴設計
4. 討論
4.1 主動式漸闊型微混合器
藉由自行製作之動態壓力產生器,輸出一隨時間呈正弦變化的壓力,進行動態壓力制動下濃度 場量化與可視化實驗,探討相位差與半角大小對於混合效率之影響。由濃度場可視化實驗中,漸 闊型與直管微混合器內皆觀察到流體介面出現不穩定現象,而漸縮型微混合器內的流場則呈穩定 的狀態。由流體穩定性分析可知,使用漸闊型微流道,臨界Reynolds number 會大幅下降,若搭配 合適的制動頻率範圍,即使在低Reynolds number 仍可激發不穩定的流場,加強流體的折疊與拉伸,
並改善混合效率。由實驗結果發現,漸闊型微混合器與漸縮型微混合器之混合效率皆高於直管微 混合器,即半角的改變有助於混合效率的提升。對於漸闊型微混合器,半角為 20°相位差為 0.75π 時,可得最佳混合效果,CV 為 0.04。對於漸縮型微混合器,半角為-30°相位差為 0.75π時,可得最 佳混合效果,CV 為 0.09。
4.2 電滲式漸闊型微混合器
針對漸闊型微混合器,我們利用 ITO 玻璃基板製作電滲驅動之電極,探討不同驅動模式、疊 加壓頭、制動電壓的相位差與漸闊半角對混合效率的影響。除分子間擴散之外,電滲式漸闊型微
混合器內主要有二種混合機制:由垂直與平行流體介面的電場梯度所造成的電滲不穩定現象,及 由入口之間逆流所造成的層疊效應。相較於unipolar 模式,以 bipolar 模式驅動工作流體,可增強 流體往覆式的流動,並產生較強的垂直電場,故其混合效率優於unipolar 模式。疊加壓頭會影響微 混合器內流體的速度,疊加壓頭越大,流速越快,減弱分子間的擴散作用,造成混合變差。由垂 直電場梯度所引起的電滲不穩定現象及逆流所造成的層疊效應,皆是在入口間電壓相異時,受到 電滲驅動力影響而產生。當相位差由0 (同相)增加至π (反相)時,入口間電壓相異時間增加,因此 延長混合機制於週期內發生的時間,使混合效率提升。但當相位差增至π時,不同流體依序進入漸 闊區 (sequential injection),造成下游區段出現染料與酒精間隔排列的現象,反而缺乏橫向混合的 機制,使混合較差。由於電滲流驅動所產生的Reynolds number 很小,使得改變漸闊半角對於混合 的提升無明顯助益。綜合實驗結果可發現,對於電滲式漸闊型微混合器,在unipolar 制動下,最佳 的混合效果發生在疊加壓頭為1 mm、相位差為 0.75π、漸闊半角為 50°時,其 ME 值為 0.65。而在 bipolar 制動下,最佳的混合效果發生在疊加壓頭為 1 mm、相位差為 0.5π、漸闊半角為 0°時,其 ME 值為0.8。
4.3 微流振盪器
除主動式微混合器外,我們亦嘗試利用自持式流體振盪的機制來增強微觀混合,設計一微流振 盪器,透過混合量化、流場可視化與頻譜分析,探討不同幾何外形設計對微流振盪器之振盪頻率 與混合效率的影響。微流振盪器內主要是靠噴流衝擊凹面產生Görtler不穩定性,結合使流體產生 偏折的Coandă效應,促進擋體後方尾流的橫向擺盪,增加流體介面接觸面積,並加強流體折疊效 應,提升混合效率。當Reynolds number增加,流場轉變為紊流模式後,紊流的特性亦能大幅提高 混合效率。導入圓角設計與縮小凹面半徑,雖能增加由Görtler渦漩所引起的不穩定性,但對於提 升混合效率並沒有明顯影響。實驗結果亦證實,突擴入口設計可增加流體不穩定性,並有效降低 達到紊流所需的Reynolds number,大幅提高微流振盪器內的混合效率。當凹面半徑為300 μm與450 μm時,在Re = 70即可發生流體振盪,使流體在擋體前方凹面區域即有良好的混合。擋體後方尾流 振盪頻率會隨入口速度增加而增加,且在不同幾何形狀設計下,入口速度與振盪頻率皆呈線性關 係。經由無因次分析,Strouhal number在不同Reynolds number及幾何形狀設計下皆維持常數,即St
= 3.8×10-5。加入圓角與突擴入口設計之微流振盪器,當凹面半徑為450 μm時,擁有最小臨界 Reynolds number (Rec = 60),且在Reynolds number為300時, ME 值可達到0.75。
參考文獻
[1] N.-T. Nguyen and Z. Wu, "Micromixers - a review," Journal of Micromechanics and Microengineering, vol. 15, pp. R1-R16, 2005.
[2] N.-T. Nguyen and Z. Wu, "Micromixers-a review," Journal of Micromechanics and Microengineering, vol. 15, pp. R1-R16, 2005.
[3] M.-Z. Huang, R.-J. Yang, C.-H. Tai, C. Hsiung, and L.-M. Fu, "Application of electrokinetic instability flow for enhanced micromixing in cross-shaped microchannel," Biomedical Microdevices, vol. 8, pp. 309-315, 2006.
[4] I. Glasgow, S. Lieber, and N. Aubry, "Parameters influencing pulsed flow mixing in microchannels," Analytical Chemistry, vol. 76, pp. 4825-4832, 2004.
[5] J. L. Lin, K. H. Lee, and G. B. Lee, "Active mixing inside microchannels utilizing dynamic variation of gradient zeta potentials," Electrophoresis, vol. 26, pp. 4605-4615, 2005.
[6] J. T. Coleman and D. Sinton, "A sequential injection microfluidic mixing strategy," Microfluidics and Nanofluidics, vol. 1, pp. 319-327, 2005.
[7] U. Gebhard, H. Hein, and U. Schmidt, "Numerical investigation of fluidic micro-oscillators,"
Journal of Micromechanical and Microengineering, vol. 6, pp. 115-117, 1996.
[8] J.-T. Yang, C.-K. Chen, I.-C. Hu, and P.-C. Lyu, "Design of a self-flapping microfluidic oscillator and diagnosis with fluorescence methods," Journal of Microelectromechanical Systems, vol. 16, pp.
826-835, 2005.
[9] G.-B. Lee, T.-Y. Kuo, and W.-Y. Wu, "A novel micromachined flow sensor using periodic flapping motion of a planar jet impinging on a V-shaped plate," Experimental Thermal and Fluid Science, vol. 26, pp. 435-444, 2002.
[10] R. F. Huang and K. T. Chang, "Evolution and turbulence properties of self-sustained transversely oscillating flow induced by fluidic oscillator," Journal of Fluids Engineering, vol. 129, pp.
1038-1047, 2007.
[11] J.-T. Yang, C.-K. Chen, K.-J. Tsai, W.-Z. Lin, and H.-J. Sheen, "A novel fluidic oscillator incorporating step-shaped attachment walls," Sensors and Actuators A, vol. 135, pp. 476-483, 2007.
[12] K. C. Sanhu and R. Govindarajan, "Stability of flow through a slowly diverging pipe," Journal of Fluids Mechanics, vol. 531, pp. 325-334, 2005.
[13] M. Hamadiche, J. Scott, and D. Jeandel, "Temporal stability of Jeffery-Hamel flow," Journal of Fluids Mechanics, vol. 268, pp. 71-88, 1994.
[14] N.-T. Nguyen, Micromixers. Norwich, NY: William Andrew, 2008.
[15] J. C. R. Hunt, C. J. Abell, J. A. Peterka, and H. Woo, "Kinematical studies of the flows around free or surface-mounted obstacles; applying topology to flow visualization," Journal of Fluid Mechanics, vol. 86, pp. 179-200, 1978.
1
出席國際學術會議心得報告
計畫編號 NSC 96-2221-E-011-100-MY3
計畫名稱 DNA檢測之微全分析系統之研發-子計畫三:脈動式混合微擴散器的研究 發展
出國人員姓名 服務機關及職稱
孫珍理
台灣科技大學機械系
會議時間地點 Santa Clara, California 美國, June 14th–15th, 2010
會議名稱 20th ASME Annual Conference on Information Storage & Processing Systems 發表論文題目 Effective Mixing in a Microfluidic Oscillator Using Impinging Jet on a Concave
Surface 一、參加會議經過
今年的 ASME-ISPS (Information Storage & Processing Systems) 我幫忙擔任 Micro / Nano Technology 其中一位 track organizer,除了參加會議外,也負責一些服務學術圈的事務。
參加會議時,為配合機票開票,於6月10日晚上抵達美國舊金山,11日至加州大學柏克萊 校區拜訪機械系的 Carey 教授與工學院院長 Pisano 教授,14日至15日全日參與研討 會,在15日上午舉行簡報,發表研究成果,和與會之其他國家研究人員進行討論,並擔任 Micro / Nano Technology 其中一個 session 的 co-chair。
二、與會心得
ISPS 為 ASME (美國機械工程師協會) 每年舉辦之資料儲存與處理系統的國際會議,由 一場 keynote lecture、一場 distinguished talk、21場 sessions 所組成,範圍主軸為硬碟相 關研究,但亦包含磨潤學、流體所引起的震動、聲學、生醫機械、奈微系統科技等領域。
與會人員涵蓋日本、韓國、台灣、德國、美國與紐西蘭等國家之研究學者參加,因舉辦地 點 (Santa Clara) 與矽谷鄰近的地緣關係,也有很多 Hitachi 與 Hewlett-Packard 的研究人 員參與,這種與工業界緊密結合的性質,是其他國際研討會較難看到的。ISPS 之特色為 會議包含的研究範圍非常廣泛,參加該會可獲得許多不同領域的最先進研究成果之訊息,
並與各國的專家教授進行討論,對於未來進行跨領域整合性研究與提昇國際視野均有極大 幫助。
三、建議
因 ISPS 與會人員包含了工業界的研究人員,所涵蓋的範圍亦以硬碟領域為主軸,參加 該會所獲得與不同領域之研究人員討論的機會殊為難得,可更瞭解除本身研究專長之外的 領域之研究狀況,跳脫目前的既有框架,尋求跨領域整合研究的機會,對於國內研究人才 培養更廣博的世界觀有極大幫助。在 ISPS 所發表之論文,經整理後亦有投稿 Journal of Microsystem Technologies (2008年 impact factor 為 1.3) 之 ISPS 2010 專刊的機會,故建 議本國之機械工程領域教授或博士班學生參與此會發表論文。
2
四、攜回資料名稱及內容
20th ISPS 之 Proceedings 一本,光碟片一張,內容包含keynote lecture 和與會者所發表 之學術論文。