使用輪廓指引為基礎之頻域濾波影像多值化方法
61
0
0
全文
(2)
(3) 摘要 本論文主要藉由調整原影像來提高現有的多值化法做多值化(Multilevel Thresholding)後的效果,基於超度量輪廓圖(Ultrametric Contour Map,UCM) 作為影像的重要輪廓來做對影像做兩種影像處理,可以使多值化效果提升,第一 種處理利用 UCM 做為參數產生雜訊,對原影像的背景與輪廓周圍部分加入適當的 雜訊做調整,降低背景影響與突顯輪廓資訊,第二種處理利用 UCM 建立濾波評估 圖作為評估濾波效果好壞的依據,配合傅立葉轉換(Fourier Transform)對影像 作頻域濾波,頻譜值通常反應影像的光影分布,過濾低頻頻譜值可以用來調整過 於明亮或過暗的區塊,降低明暗差距的影響,對於濾波時頻繁在空間域與頻率域 之間轉換的問題,透過建立頻譜樣板搭配影像的頻譜值做樣板調整,可以直接在 空間域做頻域濾波,僅需一次轉換到頻率域來取得頻譜值。 多值化本身沒有一套絕對標準來評價效果好壞,如果能藉由在多值化後的處 理取得成績也算是提高多值化的效果,我們以柏克萊大學 Computer Vision Group 提供的輪廓評估方法與資料集 BSDS 作為判斷多值化效果的依據,彩色圖 與灰階圖的 F-Measure 分數各為 0.720、0.691,原灰階圖與論文方法調整後灰 階圖以 Otsu 做二值化分數為 0.559、0.609,搭配螢火蟲演算法做四值化為 0.633、 0.668、八值化為 0.668、0.674,數據顯示以我們的方法調整影像後再進行多值 化可以有效提升多值化效果。. 關鍵詞:多值化、UCM、傅立葉轉換、Otsu、螢火蟲演算法. I.
(4) ABSTRACT This thesis proposes the method of adjusting the light distribution in the given grayscale image to improve the effect of multi-level thresholding methods. The proposed method is based on the use of Ultrametric Contour Map (UCM) of the original image to perform two steps of image processing. First, based on the UCM of the given image, the proposed method generate appropriate noise to the background and the contour of the given image to reduce the influence of background information and highlight the object contours. Next, based on the UCM of the given image, an assessment map is constructed as the basis of evaluating the filtering effect of using Fourier transform. The proposed method uses Fourier transform to derive the frequency domain parameters of the given image. Because the spectral values in the frequency domain actually reflect the light distribution in the given image, filtering the low-frequency spectral values can effectively adjust the image parts which are too bright or too dark. Besides, the proposed method also speeds up the frequency domain filtering procedure by using the template images for individual frequency domain parameters. It is hard to properly evaluate the effect of a multi-level thresholding method. However, because Berkeley Computer Vision Group had developed a method of evaluating the goodness of a contour extracting method by using the data images in BSDS. Therefore, we adopt this method as the basis of evaluating the effect of multi-level thresholding method. For example, the UCMs extracted from the color images in BSDS get the averaged F-measure score of 0.720, and those from the grayscale images in BSDS gets 0.691. Similarly, for the grayscale images and the filtered grayscale images, their resulting bi-level images thresholded by the same Otsu method get the averaged F-measure scores of 0.559 and 0.609, respectively. For the grayscale images and the filtered grayscale images, when the Otsu method is coupled with the firefly algorithm, the resulting four-level images get the averaged F-measure scores of 0.633 and 0.668, respectively, and the resulting 8-level images get the averaged F-measure scores of 0.668 and 0.674, respectively. Accordingly, thresholding the filtered images generated by the proposed method can effectively improve the multi-level thresholding method. Keywords: multi-level thresholding, UCM, Fourier transform, firefly algorithm. II.
(5) 目錄 摘要 ............................................................... I A B S T R A C T ...................................................... II 目錄 ............................................................. III 圖目錄 ............................................................ IV 表目錄 ........................................................... VII 第一章 緒論 ........................................................ 1 1-1 研究背景 ....................................................................................................... 1 1-2 研究目的 ....................................................................................................... 2 1-3 系統流程 ....................................................................................................... 3 1-4 論文架構 ....................................................................................................... 4 第二章 文獻探討 .................................................... 5 2-1 影像多值化 ................................................................................................... 5 2-2 螢火蟲演算法 ............................................................................................... 8 2-3 輪廓偵測 ..................................................................................................... 10 第三章 以重要輪廓為基礎之背景調整 ................................. 12 3-1 超度量輪廓圖 ............................................................................................. 12 3-2 雜訊參數 ..................................................................................................... 19 3-3 以雜訊進行背景調整 ................................................................................. 22 第四章 以輪廓指引為基礎之頻域濾波 ................................. 23 4-1 濾波評估圖 ................................................................................................. 23 4-2 頻域濾波 ..................................................................................................... 27 4-3 頻譜樣板 ..................................................................................................... 30 第五章 實驗結果 ................................................... 32 5-1 多值化效果比較 ......................................................................................... 32 5-2 頻域濾波加速 ............................................................................................. 47 第六章 結論 ....................................................... 49 參考文獻 .......................................................... 50. III.
(6) 圖目錄 圖 1-1 原始灰階影像 ................................................ 3 圖 1-2 加入雜訊影像 ................................................ 3 圖 1-3 濾波後影像 ................................................... 3 圖 1-4 輪廓引導頻域濾波多值化方法 .................................. 4 圖 2-1 [18]多值化演算法 ............................................ 7 圖 2-2 [18]四值化過程 .............................................. 7 圖 2-3 群中心演算法 ................................................ 8 圖 2-4 區塊切割 .................................................... 8 圖 2-5 Sobel 輪廓圖 ................................................. 8 圖 2-6 螢火蟲移動 .................................................. 9 圖 2-7 Roberts 模板 ................................................ 10 圖 2-8 Sobel 模板 .................................................. 10 圖 2-9 Prewitt 模板 ................................................ 11 圖 2-10 canny 輪廓偵測 ............................................. 11 圖 3-1 人類在意的輪廓 ............................................. 12 圖 3-2 groundtruth ................................................. 13 圖 3-3 由左到右依序為彩色圖、L、a、b ............................... 14 圖 3-4 八種角度遮罩 ............................................... 14 圖 3-5 遮罩示意 ................................................... 14 圖 3-6 所有遮罩對圖 3-3(a)彩色圖作用的結果 ......................... 15 圖 3-7 計算影像紋理特徵用的遮罩 ................................... 15 圖 3-8 nonmax 細線化 ............................................... 16 圖 3-9 多尺度輪廓強度圖 ........................................... 16 圖 3-10 紅點與綠點有低相似度、與藍點有高相似度 .................... 17 圖 3-11 相似度稀疏矩陣 W 與對角矩陣 D ............................... 17 圖 3-12 取出前 17 組 ............................................... 17 圖 3-13 前六張特徵向量還原的光譜圖 ................................ 18 圖 3-14 八個角度遮罩 .............................................. 18 圖 3-15 全域性輪廓強度圖 .......................................... 18 圖 3-16 輪廓強度調整 .............................................. 19 圖 3-17 超度量輪廓圖(Ultrametric Contour Map,UCM) .................. 19 圖 3-18 Two-Pass 連通算法 .......................................... 20 圖 3-19 (a)未過濾的 ucm (b)未過濾的 ucm 輪廓數 (c)未過濾 ucm 的區塊 .. 21 (d)過濾後 ucm (e)過濾後 ucm 的輪廓數 (f)過濾後 ucm 區塊 .............. 21 圖 3-20 (a)區塊參數 (b)輪廓參數 (c)兩者合併 ....................... 21 圖 3-21 (a)原影像 (b)雜訊 (c)雜訊影像 ............................. 22 IV.
(7) 圖 4-1 濾波評估點 ................................................. 23 圖 4-2 9x9 的高斯遮罩 .............................................. 24 圖 4-3 前六條強烈輪廓的濾波評估點 ................................. 24 圖 4-4 (a)濾波評估圖 (b)重疊在灰階圖上顯示 ........................ 25 圖 4-5 向量外積分兩邊 ............................................. 25 圖 4-6 (a)濾波評估圖 (b)GreenMap (c)BlueMap ........................ 26 圖 4-7 (a)間距 2 (b)間距 3 (c)間距 4 ................................ 27 圖 4-8 (a)原影像 (b)轉回空間域的低頻頻譜值 (c)移除該頻譜值後影像 .. 27 圖 4-9 (a)原影像 Score=1.032 (b)濾掉一個頻譜值 Score=1.283 .......... 28 (c)原影像過濾完 Score=1.801 ........................................ 28 圖 4-10 使用輪廓指引為基礎之頻域濾波影像多值化方法 ................ 28 圖 4-11 (a)原影像 (b)論文方法處理影像 (c)圖(a)使用 Otsu 做二值化 ... 29 (d)圖(b)使用 Otsu 做二值化 (e)圖(a)使用 Otsu 搭配螢火蟲算法做八值化 . 29 (f)圖(b) 使用 Otsu 搭配螢火蟲算法八值化 ............................ 29 圖 4-12 建立頻譜樣板 .............................................. 30 圖 4-13 頻譜樣板舉例 .............................................. 31 圖 4-14 頻譜樣板使用示意 .......................................... 31 圖 5-1 取出 9 張資料集彩色圖作為範本 ............................... 33 圖 5-2 由五個不同使用者人為對圖 5-1(a)彩色圖框出來的重要輪廓 ....... 34 圖 5-3 由圖 5-2 的五張輪廓合成 GroundTruth .......................... 34 圖 5-4 圖 5-1 的 9 張範本對應的 GroundTruth .......................... 35 圖 5-5 圖 5-1 的 9 張範本彩色圖的超度量輪廓圖 ....................... 36 圖 5-6 圖 5-1 的 9 張範本彩色圖灰階化 ............................... 37 圖 5-7 圖 5-6 的 9 張灰階圖的超度量輪廓圖 ............................ 38 圖 5-8 (a)原影像灰階圖 (b)論文方法處理後灰階圖 .................... 40 圖 5-9 (a)原影像灰階圖四值化 (b) 四值圖的超度量輪廓圖 ............. 40 圖 5-10 (a) 論文方法處理後灰階圖四值化 (b) 四值圖的超度量輪廓圖 ... 40 圖 5-11 (a)原灰階圖 (b) 圖(a)用 Cluster_Otsu 做二值化 (c) 圖(a)用 Cluster_Otsu 做三值化 (d) 圖(a)用 Cluster_Otsu 做四值化 (e) 圖(a)用 Cluster_Otsu 做五值化 (f) 圖(a)用 Cluster_Otsu 做六值化 (g) 圖(a)用 Cluster_Otsu 做七值化 (h) 圖(a)用 Cluster_Otsu 做八值化 ............. 41 圖 5-12 (a)論文方法處理後灰階圖 (b) 圖(a)用 Cluster_Otsu 做二值化 (c) 圖(a)用 Cluster_Otsu 做三值化 (d) 圖(a)用 Cluster_Otsu 做四值化 (e) 圖(a) 用 Cluster_Otsu 做五值化 (f) 圖(a)用 Cluster_Otsu 做六值化 (g) 圖(a)用 Cluster_Otsu 做七值化 (h) 圖(a)用 Cluster_Otsu 做八值化 ............. 42 圖 5-13 (a)GroundTruth (b)原灰階圖二值化的超度量輪廓圖 (c)原灰階圖三值 化的超度量輪廓圖 (d)原灰階圖四值化的超度量輪廓圖 (e)原灰階圖五值化的 超度量輪廓圖 (f)原灰階圖六值化的超度量輪廓圖 (g)原灰階圖七值化的超度 V.
(8) 量輪廓圖 (h)原灰階圖八值化的超度量輪廓圖 .......................... 43 圖 5-14 (a)GroundTruth (b)論文方法處理後灰階圖二值化的超度量輪廓圖 (c) 論文方法處理後灰階圖三值化的超度量輪廓圖 (d)論文方法處理後灰階圖四值 化的超度量輪廓圖 (e)論文方法處理後灰階圖五值化的超度量輪廓圖 (f)論文 方法處理後灰階圖六值化的超度量輪廓圖 (g)論文方法處理後灰階圖七值化的 超度量輪廓圖 (h)論文方法處理後灰階圖八值化的超度量輪廓圖 .......... 44 圖 5-15 輪廓偵測視覺上的比較 (a)GroundTruth (b)原灰階圖 (c)論文方法處 理後灰階圖 (d)原灰階圖四值化 (e)論文方法處理過後灰階圖四值化 (f)圖(d) 四值圖的超度量輪廓圖,分數 0.469 (g)圖(e)四值圖的超度量輪廓圖,分數 0.715 ................................................................... 46 圖 5-16 (a)過濾前 (b)過濾後 ....................................... 47 圖 5-17 (a)過濾前 (b)過濾後 ....................................... 47. VI.
(9) 表目錄 表 5-1 彩色圖與灰階圖分數比較 ..................................... 39 表 5-2 圖 5-8(a)與圖 5-8(b)以 Otsu 做多值化的 F-Measure 分數 ......... 45 表 5-3 原灰階圖與論文處理灰階圖以 Otsu 做多值化的 300 張測試圖整體 F-Measure 分數 ..................................................... 45 表 5-4 濾波時間比較 ............................................... 47 表 5-5 設備環境 ................................................... 48. VII.
(10) 第一章 緒論 1-1 研究背景 影像多值化屬於影像處理中前處理的相當重要的一環,二值化是多值化中的 一個特例,相較於二值化將影像降階分為黑白兩色,多值化成三值、四值、五值…, 更能保留適當的影像特徵做處理,如[1]利用多值化後做輪廓偵測來檢驗水梨壓 傷的部位,若是做二值化處理則會丟失壓傷部位的訊息,[2]則是利用多值化讓 腦部影像中腦腫瘤的資訊能夠保留下來檢測腫瘤的位置與大小,[3]是基於多值 化的身份證號碼辨識,影像通常有光源問題,如過暗、過亮,比起多值化,二值 化更容易受到光影變化亮度不均的影響而無法反應正確的訊息,[4]也使用多值 化來解決影像拍攝過程中,會有不同白光干涉的問題。 多值化方法可以基於二值化方法擴展而來,因為二值化是多值化中的一個特 例,所以可以由二值化調整為多值化方法,在[5]的論文中提到了數種二值化法, 其中就有可以推展至多值化的方法,如 Cluster_Otsu [6]、Entropy_Kapur [7], 但直接使用推展的方法來窮舉所有解會有相當差的計算時間,所以通常會搭配最 佳化演算法如粒子群演算法(Particle Swarm Optimization , PSO) [8]、螢火蟲演算法 (Firefly Algorithm) [9]來加速求解,[10]使用兩者配合 Entropy_Kapur 做影像多值 化以峰值信噪比(Peak Signal to Noise Ratio , PSNR) [11]做比較,其中螢火 蟲演算法較好的結果與計算時間,[12]則不同於[10],使用 Cluster_Otsu 來配 合螢火蟲演算法進行影像多值化。 其他多值化法如[13]以平均值為中心向左右以標準差調整取得多門檻值,但 用來調整標準差倍數的自由參數設定會影響結果好壞且只能做偶數多值化,[14] 使用灰階值、鄰居平均值、鄰居中值三樣參數以 K-mean[15]來分群將做多值化, [16]將以 Sobel [17]做輪廓偵測得到的輪廓圖作為選擇訓練點的依據,將影像 分為 32x32 共 1024 個區塊,在各個區塊各取兩個點當作一黑一白的訓練點建立 訓練資料丟入支撐向量機 (Support Vector Machine,SVM) [18] 做訓練並配合 1.
(11) 已知的多值圖的比例來調整訓練資料,之後以訓練完的模型對影像做多值化,但 方法本身在調整比例會重複多次 SVM 訓練過程造成運算時間冗長,且 SVM 本身有 不好駕馭、訓練結果會受兩樣重要的可調參數 C 與 gamma 影響的缺點,若使用交 叉驗證(Cross Validation) [19]來自動調整參數又會有時間成本過高的問題。 多值化通常希望降階後能保留越多的影像特徵越好,但那些重要的資訊常常 受到外部光影差異影響和藏於背景之中,盡管影像處理行之有年,要從過度曝光、 陰影或是複雜背景的影像取出那些重要資訊還是有相當的難度,如何對影像進行 調整使影像的資訊能夠顯現依然值得研究,[20]就針對這些問題提出一個以超度 量輪廓圖(Ultrametric Contour Map,UCM) [21-23]為基礎來改善二值化效果的 背景調整頻域濾波法,利用兩種不一樣條件的影像分割合併出前景圖為參數來對 影像加入雜訊模糊背景,接著利用傅立葉轉換(Fourier Transform) [24]做頻域 濾波減少光影差異,然後進行二值化,確實對二值化效果有所提升,而二值化又 是多值化的一種特例,使用相同理念來套用多值化方法相信也會有所改善。 多值化與輪廓偵測同屬影像處理中前處理的一環,其他常見的輪廓偵測法有 如 Canny [25]、Prewitt [26]、Roberts [27]等,上述方法[16、20]兩者皆使 用到輪廓來作為處理影像的依據並有一定的成效讓我們意識到了輪廓確實對影 像處理有其重要與可用性,而輪廓偵測通常又與後續的處理有關,於是如何處理 影像來提高多值化效果、辨識出準確的輪廓來進行後續的操作便成了相當重要的 問題。. 1-2 研究目的 為了讓多值化能夠應付複雜背景與光影問題,本論文著重於對影像做調整來 提升多值化法的多值化效果,基於[20]的想法理念進行優化修改後配合最佳化算 法推展至多值化,首先將 UCM 過濾合併後視為重要輪廓建立雜訊參數圖對影像背 景與輪廓周圍各自添加適當的雜訊以突顯前景,然後同樣利用過濾後的 UCM 建立 濾波評估圖配合事先建立的頻譜樣板做頻域濾波降低光影影響並減少空間域與 2.
(12) 頻率域轉換的時間,用來提高多值化後邊緣偵測的效果。. 1-3 系統流程 在進行影像多值化以前,我們先根據原影像(圖 1-1)的影像輪廓強弱由小到 大過濾漸漸合併至適當的 region 數,以留下的強烈輪廓與 region 區塊大小做為 參數對影像加入適當的雜訊,如圖 1-2,可以適度模糊掉影像中屬於背景的部份 讓前景資訊較為明顯,同樣利用輪廓建立的評估圖能使我們可以判別對加入雜訊 後的影像進行的頻域濾波是否為有效濾波,濾波結果如圖 1-3,藉由以上對背景 與光影差異的處理來調整原影像後,以擴展至多值化的 otsu 法配合螢火蟲演算 法來進行多值化,流程如圖 1-4。. 圖 1-1 原始灰階影像. 圖 1-2 加入雜訊影像. 3. 圖 1-3 濾波後影像.
(13) 1-4 論文架構. 圖 1-4 輪廓引導頻域濾波多值化方法. 本論文共分六個章節,第一章為研究背景與動機、研究目的和系統流程,第 二章做文獻探討,講述多值化方法、優化求解速度的螢火蟲演算法與輪廓偵測, 第三章介紹如何基於輪廓建立添加至影像的雜訊,第四章說明如何建立評估圖與 頻譜樣板加速對影像的頻域濾波,第五章討論實驗結果,最後第六章為結論。. 4.
(14) 第二章 文獻探討 2-1 影像多值化 影像多值化是將影像由灰階圖轉至多值圖,可以三值、四值、五值…,二值 化是則多值化中的一個特例,將影像僅分為黑白兩種值,而多值化可以基於二值 化方法擴展至多值化方法來使用,如 Cluster_Otsu[6]在二值化的公式 2-1 如:’. 其中. 𝑇𝑇ℎ∗ = 𝑎𝑎𝑎𝑎𝑎𝑎 𝑚𝑚𝑚𝑚𝑚𝑚 �. 𝜎𝜎02 =. 𝜔𝜔0 (𝜇𝜇0 − 𝜇𝜇 𝑇𝑇 )2 + 𝜔𝜔1 (𝜇𝜇1 − 𝜇𝜇 𝑇𝑇 )2 � 𝜔𝜔0 𝜎𝜎02 +𝜔𝜔1 𝜎𝜎12. 2 ∑𝑇𝑇ℎ 𝑜𝑜 (𝑖𝑖 − 𝜇𝜇0 ) ∗ 𝑝𝑝(𝑖𝑖) 𝜔𝜔0. ∑𝑇𝑇ℎ 𝑖𝑖=0 𝑖𝑖 ∗ 𝑝𝑝(𝑖𝑖) 𝜇𝜇0 = 𝜔𝜔0. 2 ∑255 𝑇𝑇ℎ+1(𝑖𝑖 − 𝜇𝜇1 ) ∗ 𝑝𝑝(𝑖𝑖) 𝜔𝜔1. ∑255 𝑖𝑖=𝑇𝑇ℎ+1 𝑖𝑖 ∗ 𝑝𝑝(𝑖𝑖) 𝜇𝜇1 = 𝜔𝜔1. 𝑇𝑇ℎ. 255. 𝜔𝜔0 = � 𝑝𝑝(𝑖𝑖). 值𝑖𝑖出現的次數 總𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝數. 255. 𝜇𝜇 𝑇𝑇 = � 𝑖𝑖 ∗ 𝑝𝑝(𝑖𝑖) 𝑖𝑖=0. (2-1). 𝜔𝜔1 = � 𝑝𝑝(𝑖𝑖). 𝑖𝑖=0. 𝑝𝑝(𝑖𝑖) =. 𝜎𝜎12 =. 255. ,. 𝑖𝑖=𝑇𝑇ℎ+1. � 𝑝𝑝(𝑖𝑖) = 𝜔𝜔0 + 𝜔𝜔1 = 1 𝑖𝑖=0. 𝜎𝜎為群內標準差,𝜇𝜇為群內平均值,𝜇𝜇 𝑇𝑇 為整體平均值,𝜔𝜔為群所佔的比例,𝑝𝑝(𝑖𝑖)為 值𝑖𝑖所佔的比例,otsu 透過統計 0~255 每種值所佔的比例配合公式找出一個門檻. 值𝑇𝑇ℎ∗ 分為兩群,希望群內差異越小越好、群間差異越大越好,這樣找出來的門 檻值能使群內離散程度小、群間的距離也拉得開,經由二值化公式,otsu 也可以 推展至多值化方法,如公式 2-2: 𝑇𝑇ℎ. 其中. ∗. 𝜔𝜔0 (𝜇𝜇0 − 𝜇𝜇 𝑇𝑇 )2 + 𝜔𝜔1 (𝜇𝜇1 − 𝜇𝜇 𝑇𝑇 )2 + … + 𝜔𝜔𝐾𝐾−1 (𝜇𝜇𝐾𝐾−1 − 𝜇𝜇 𝑇𝑇 )2 � = 𝑎𝑎𝑎𝑎𝑎𝑎 𝑚𝑚𝑚𝑚𝑚𝑚 � 2 𝜔𝜔0 𝜎𝜎02 +𝜔𝜔1 𝜎𝜎12 + ⋯ + 𝜔𝜔𝐾𝐾−1 𝜎𝜎𝐾𝐾−1. 2 ∑𝐾𝐾−1 𝑖𝑖=0 𝜔𝜔𝑖𝑖 (𝜇𝜇𝑖𝑖 − 𝜇𝜇 𝑇𝑇 ) � = 𝑎𝑎𝑎𝑎𝑎𝑎 𝑚𝑚𝑚𝑚𝑚𝑚 � 2 ∑𝐾𝐾−1 𝑖𝑖=0 𝜔𝜔𝑖𝑖 𝜎𝜎𝑖𝑖. 5. (2-2).
(15) 𝑇𝑇ℎ(2) ∑𝑇𝑇ℎ(1) (𝑖𝑖 − 𝜇𝜇0 )2 ∗ 𝑝𝑝(𝑖𝑖) 2 ∑𝑇𝑇ℎ(1)+1(𝑖𝑖 − 𝜇𝜇1 )2 ∗ 𝑝𝑝(𝑖𝑖) 𝑜𝑜 = , 𝜎𝜎1 = , …, 𝜔𝜔0 𝜔𝜔1 2 ∑255 𝑇𝑇ℎ(𝐾𝐾−1)+1(𝑖𝑖 − 𝜇𝜇𝐾𝐾−1 ) ∗ 𝑝𝑝(𝑖𝑖) 2 = 𝜎𝜎𝐾𝐾−1 𝜔𝜔𝐾𝐾−1 ∑𝑇𝑇ℎ(2) ∑255 ∑𝑇𝑇ℎ(1) 𝑖𝑖=𝑇𝑇ℎ(1)+1 𝑖𝑖 ∗ 𝑝𝑝(𝑖𝑖) 𝑖𝑖=𝑇𝑇ℎ(𝐾𝐾−1)+1 𝑖𝑖 ∗ 𝑝𝑝(𝑖𝑖) 𝑖𝑖=0 𝑖𝑖 ∗ 𝑝𝑝(𝑖𝑖) 𝜇𝜇0 = , 𝜇𝜇1 = , … , 𝜇𝜇𝐾𝐾−1 = 𝜔𝜔0 𝜔𝜔1 𝜔𝜔𝐾𝐾−1. 𝜎𝜎02. 𝑇𝑇ℎ(1). 𝑇𝑇ℎ(2). 𝑖𝑖=0. 𝑖𝑖=𝑇𝑇ℎ(1)+1. 𝜔𝜔0 = � 𝑝𝑝(𝑖𝑖) , 𝜔𝜔1 =. �. 𝑝𝑝(𝑖𝑖) , 𝜔𝜔𝐾𝐾−1 =. 255. �. 𝑖𝑖=𝑇𝑇ℎ(𝐾𝐾−1)+1. 𝑝𝑝(𝑖𝑖). 透過複數個門檻值來分為複數群,otsu 推展至多值化希望找出能使多群各群內 內離散程度小、多群間的距離也拉得開的門檻值來做多值化,做𝐾𝐾值化則需要 𝐾𝐾 − 1個門檻值。. Entropy_Kapur[7]依影像亂度來計算門檻值,希望前景與背景兩群各自的. 亂度要大越好,亂度反映群集包含的資料分布,越大表示包含越多種的資料, 當兩群資料分布越均勻時,可以得到加總的最大亂度,kapur 在二值化的公式 2-3 如下: 𝑇𝑇ℎ∗ = 𝑎𝑎𝑎𝑎𝑎𝑎 𝑚𝑚𝑚𝑚𝑚𝑚[ 𝐻𝐻0 + 𝐻𝐻1 ]. 其中 𝑇𝑇ℎ. 255. 𝑝𝑝(𝑖𝑖) 𝑝𝑝(𝑖𝑖) 𝐻𝐻0 = − � 𝑙𝑙𝑙𝑙𝑙𝑙 𝜔𝜔0 𝜔𝜔0. 𝐻𝐻1 = − �. 𝑖𝑖=0. 𝑖𝑖=𝑇𝑇ℎ+1. kapur 在用於多值化時則會改寫為公式 2-4:. (2-3) 𝑝𝑝(𝑖𝑖) 𝑝𝑝(𝑖𝑖) 𝑙𝑙𝑙𝑙𝑙𝑙 𝜔𝜔1 𝜔𝜔1. 𝑇𝑇ℎ∗ = 𝑎𝑎𝑎𝑎𝑎𝑎 𝑚𝑚𝑚𝑚𝑚𝑚[ 𝐻𝐻0 + 𝐻𝐻1 + ⋯ 𝐻𝐻𝐾𝐾−1 ]. 𝐻𝐻0 = − ∑𝑇𝑇ℎ(1) 𝑖𝑖=0. 𝑝𝑝(𝑖𝑖) 𝜔𝜔0. 𝑙𝑙𝑙𝑙𝑙𝑙. 𝐻𝐻𝐾𝐾−1 = − 來最大化多群間的亂度。. 𝑝𝑝(𝑖𝑖) 𝜔𝜔0. 𝐻𝐻1 = − ∑𝑇𝑇𝑇𝑇(2) 𝑖𝑖=𝑇𝑇ℎ(1)+1. 𝑝𝑝(𝑖𝑖). ⁞ 255. �. 𝑖𝑖=𝑇𝑇ℎ(𝐾𝐾−1)+1. 𝜔𝜔1. 𝑙𝑙𝑙𝑙𝑙𝑙. 𝑝𝑝(𝑖𝑖) 𝜔𝜔1. (2-4). 𝑝𝑝(𝑖𝑖) 𝑝𝑝(𝑖𝑖) 𝑙𝑙𝑙𝑙𝑙𝑙 𝜔𝜔𝐾𝐾−1 𝜔𝜔𝐾𝐾−1. 然而直接使用推展的多值化方法來窮舉所有解會有相當差的計算時間,所 6.
(16) 以通常會搭配最佳化演算法來加速求解解決時間問題,如螢火蟲演算法[9]就 是一個好的最佳化演算法,將會在下一節做介紹。 [13]以平均值與標準差為基礎做影像多值化,多值化目標𝐾𝐾演算法如圖 2-1,以四值化為過程範例如圖 2-2。. 圖 2-1 [18]多值化演算法. 圖 2-2 [18]四值化過程. k-mean [15]是一種常用在資料分群的算法,[14]則以灰階值、鄰居平均 值、鄰居中值當作每個影像點的三維特徵使用 k-mean 來做多值化,做𝐾𝐾值化就 7.
(17) 有𝐾𝐾個群中心,當群中心收斂不再移動後將每個影像點歸屬給距離自己最近的 群中心來完成多值化,群中心的初始化利用三維特徵各自排序後截成𝐾𝐾 − 1後. 由決定,演算法如圖 2-3。. 圖 2-3 群中心演算法. SVM [18]是一種監督式學習的分類方法,需要事先知道輸入與輸出來訓練 model,再用 model 對資料做分類,[16]將影像切為 32x32 共 1024 個區塊(圖 2-4),以 Sobel [17]做輪廓偵測得到的輪廓圖(圖 2-5)為基礎在每個區塊挑選 輪廓強度最強的點當作特徵黑點,特徵白點則基於特徵黑點混合而成,把每個 區塊得到的特徵點當作訓練資料送入 SVM 做訓練,並配合已知的多值化圖的比 例來調整 model 做多值化。. 圖 2-4 區塊切割. 圖 2-5 Sobel 輪廓圖. 2-2 螢火蟲演算法. 由二值化推展的多值化法都有窮舉所有解花費太多時間的問題,所以通常會 搭配最佳化演算法來進行加速如螢火蟲演算法就是一種最佳化演算法,螢火蟲演 算法是透過觀察自然界中螢火蟲發光行為所建立的演算法,不同種類的螢火蟲有 8.
(18) 不一樣的發光目的,可能是求偶或吸引獵物,雄性螢火蟲會使用發光的強度做為 競爭的方式來吸引雌性螢火蟲,使雌性螢火蟲追隨著發光的雄性螢火蟲飛行。 螢火蟲演算法中,每一隻螢火蟲散佈在多維的空間中,相當於多個門檻值, 這些螢火蟲的亮度與自己所在的位置有關,我們使用多值化 otsu 來計算螢火蟲 的亮度,越好的解亮度就越亮,每一螢火蟲除了最亮的那一隻以外都會往比自己 亮的螢火蟲方向移動,離自己越近、亮度越亮的螢火蟲移動的越快,如圖 2-6, 最亮的那一隻則會在自己周圍看看有沒有更好的解,在每隻螢火蟲都進行過移動 後,更新每隻螢火蟲的亮度後重複動作直到達到停止條件。. 圖 2-6 螢火蟲移動. 螢火蟲演算法的主要流程可分為佈署螢火蟲、計算亮度、三個階段,第一階 段讓螢火蟲均勻帶著多維的解散佈在空間中,第二階段計算螢火蟲所在位置的亮 度,螢火蟲的亮度代表所在位置的好壞,越亮的表示解越好,在每隻螢火蟲都有 了自己的亮度後,第三階段開始螢火蟲被亮度比自己亮的螢火蟲吸引向其移動, 移動的速度會受到螢火蟲之間的距離影響,重複流程直到迭代結束,移動速度如 公式 2-5: 𝑋𝑋𝑖𝑖𝑡𝑡+1 = 𝑋𝑋𝑖𝑖𝑡𝑡 +𝛽𝛽�𝑋𝑋𝑗𝑗𝑡𝑡 − 𝑋𝑋𝑖𝑖𝑡𝑡 � + (𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 − 0.5). 其中. 𝛽𝛽 = 𝑒𝑒 −𝑑𝑑𝑖𝑖𝑖𝑖. 2. , 𝑑𝑑𝑖𝑖𝑖𝑖 = �∑𝑛𝑛𝑘𝑘=1(𝑋𝑋𝑗𝑗,𝑘𝑘 − 𝑋𝑋𝑖𝑖,𝑘𝑘 )2 9. (2-5).
(19) 𝑡𝑡+1. 𝑋𝑋𝑖𝑖𝑡𝑡 為蟲𝑖𝑖移動前的空間位置,𝑋𝑋𝑖𝑖. 為蟲𝑖𝑖移動後的空間位置,𝑋𝑋𝑗𝑗𝑡𝑡 為目標的移動位置,. 吸引度𝛽𝛽則會受到蟲與蟲之間的空間距離𝑑𝑑𝑖𝑖𝑖𝑖 影響,n 為空間維度。. 2-3 輪廓偵測. 輪廓偵測是一門有重要且有難度的學問,影像中的重要資訊通常與輪廓有 強烈的關係,人類也是透過輪廓來記憶、分別對物體的認知,於是如何偵測出好 的輪廓便成了相當重要的問題,Roberts 法 [27]透過兩個 2x2 的模板(圖 2-7) 做局部差分來尋找輪廓,公式 2-6 如: 𝐺𝐺(𝑥𝑥, 𝑦𝑦) = |𝑓𝑓(𝑥𝑥, 𝑦𝑦) − 𝑓𝑓(𝑥𝑥 + 1, 𝑦𝑦 + 1)| + |𝑓𝑓(𝑥𝑥 + 1, 𝑦𝑦) − 𝑓𝑓(𝑥𝑥, 𝑦𝑦 + 1)|. (2-6). 圖 2-7 Roberts 模板. Sobel 法[17]則以兩個 3x3 的模板(圖 2-8)分別對影像做卷積計算橫向與縱向的 結果結合來尋找輪廓,Prewitt 法[26]與 Sobel 法僅有模板上的不同,如圖 2-9, 算法如下: −1 𝐺𝐺𝑥𝑥 = �−2 −1. 0 0 0. 𝐺𝐺 = �𝐺𝐺𝑥𝑥2 + 𝐺𝐺𝑦𝑦2. 𝜗𝜗 = 𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎 �. 1 2� ∗ 𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖 1. 1 𝐺𝐺𝑦𝑦 = � 0 −1. 2 0 −2. 𝐺𝐺𝑦𝑦 � 𝐺𝐺𝑥𝑥. 圖 2-8 Sobel 模板 10. 1 0 � ∗ 𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖 −1. (2-7).
(20) 圖 2-9 Prewitt 模板. Canny 法[25]則是結合其他輪廓偵測法的一種方法,先透過 5x5 的高斯濾波器對 影像做霧化,如公式 2-8,然後利用其他的方法,通常是以 sobel 來計算輪廓, 2 4 5 ⎡4 9 12 1 ⎛⎢ 𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖 ′ (𝑖𝑖, 𝑗𝑗) = ∗ 𝑠𝑠𝑠𝑠𝑠𝑠 ⎜ ⎢5 12 15 159 ⎢4 9 12 5 ⎝ ⎣2 4. 4 9 12 9 4. 2 4⎤ ⎞ ⎥ 5⎥ .∗ 𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖(𝑖𝑖 − 2: 𝑖𝑖 + 2, 𝑗𝑗 − 2: 𝑗𝑗 + 2)⎟ 4⎥ 2⎦ ⎠. (2-8). 接著利用 nonmax 做細線化後以一高一低的雙閥值判斷該輪廓強度是否為保留, nonmax 取的方向𝜗𝜗如上,canny 輪廓偵測做完可以得到如圖 2-10。. 圖 2-10 canny 輪廓偵測. 超度量輪廓圖(Ultrametric Contour Map,UCM) [21-23]則是一個將影像處 理為三種特徵(亮度、色彩、紋理)各自計算八個角度的光影差異並透過不同的權 重來合併成為輪廓的方法,在[21]中數據顯示以柏克萊大學用來辨別輪廓偵測結 果好壞用的 dataset 與 benchmark (BSDS) [28]做判別,以 UCM 用來輪廓偵測有 比其他方法較好的結果。. 11.
(21) 第三章 以重要輪廓為基礎之背景調整 為了提高多值化的效果,我們將以超度量輪廓圖(Ultrametric Contour Map,UCM) [21-23]為基礎,在這個章節講述如何對影像背景加入適當的雜訊做調 整,讓重要的資訊從背景中突顯,在下個章節說明如何透過以 UCM 建立的濾波評 估圖進行頻域濾波降低光影差異的影響。. 3-1 超度量輪廓圖 輪廓通常與影像中的重要訊息有關,人類也是透過輪廓來記憶、分別對物 體的認知,如圖 3-1 為 BSDS [28]用來辨別輪廓偵測結果好壞用的 dataset 與. 圖 3-1 人類在意的輪廓. benchmark 中,人為勾勒出的輪廓,為人類看到影像會在意的部分,用來合成 12.
(22) groundtruth (圖 3-2)做輪廓好壞的評價,接下來會介紹本論文用來處理原影像 的基礎,超度量輪廓圖(Ultrametric Contour Map,UCM)如何得出。. 圖 3-2 groundtruth. 建立多尺度輪廓強度圖是將影像分為亮度、色彩、紋理三種特徵各自分為多 個量級,根據明暗的差距來找出輪廓再透過不同的權重合併而來。 多尺度輪廓強度圖的計算會使用到 Lab 色彩空間,Lab 色彩空間是由國際照 明協會所提出,其中 L 代表亮度,範圍在[0,100],a 和 b 則是色彩,a 用來描述 綠色到紫紅色,範圍在[-500,500],b 則是描述藍色至黃色,範圍在[-200,200], RGB 色彩空間轉換至 Lab 色彩空間需要經由 XYZ 色彩空間,首先將 RGB 色彩空間 轉至 XYZ 色彩空間,轉換矩陣如下: 𝑋𝑋 0.4124 0.3575 0.1804 𝑅𝑅 �𝑌𝑌 � = �0.2126 0.7151 0.0721� �𝐺𝐺 � 𝑍𝑍 0.0193 0.1191 0.9502 𝐵𝐵. (3-1). 接著由 XYZ 色彩空間轉至 Lab 色彩空間,公式如下: 1. ⎧ 𝑌𝑌 3 𝑌𝑌 ⎪116 ∗ � � − 16 , 𝑖𝑖𝑖𝑖 > 0.008856 𝑌𝑌𝑌𝑌 𝑌𝑌𝑌𝑌 𝐿𝐿 = ⎨ 𝑌𝑌 ⎪ 903.3 ∗ , 其他 𝑌𝑌𝑌𝑌 ⎩ 𝑋𝑋 𝑌𝑌 𝑌𝑌 𝑍𝑍 𝑎𝑎 = 500 ∗ �𝑓𝑓 � � − 𝑓𝑓 � �� 𝑏𝑏 = 200 ∗ �𝑓𝑓 � � − 𝑓𝑓 � �� 𝑋𝑋𝑋𝑋 𝑌𝑌𝑌𝑌 𝑌𝑌𝑌𝑌 𝑍𝑍𝑍𝑍 其中. 13. (3-2).
(23) 𝑋𝑋𝑋𝑋 = 0.9515 𝑌𝑌𝑌𝑌 = 1.0000 𝑍𝑍𝑍𝑍 = 1.0886 𝑓𝑓(𝑡𝑡) = �. 1. 𝑡𝑡 3. , 𝑖𝑖𝑖𝑖 𝑡𝑡 > 0.008856 16 7.787 ∗ 𝑡𝑡 + , 其它 116. 轉換結果如圖 3-3,利用亮度 L、色彩 a、色彩 b 來計算亮度梯度與色彩梯度,. (a). (b). (c). (d). 圖 3-3 由左到右依序為彩色圖、L、a、b. 將 L、a、b 各分成為 25 種 level,在套用八種不同方向的遮罩(圖 3-4)來計算 八個角度的光影強弱變化,示意圖如圖 3-5,遮罩對圖 3-3(a)的作用如圖 3-6。. 圖 3-4 八種角度遮罩. 圖 3-5 遮罩示意 14.
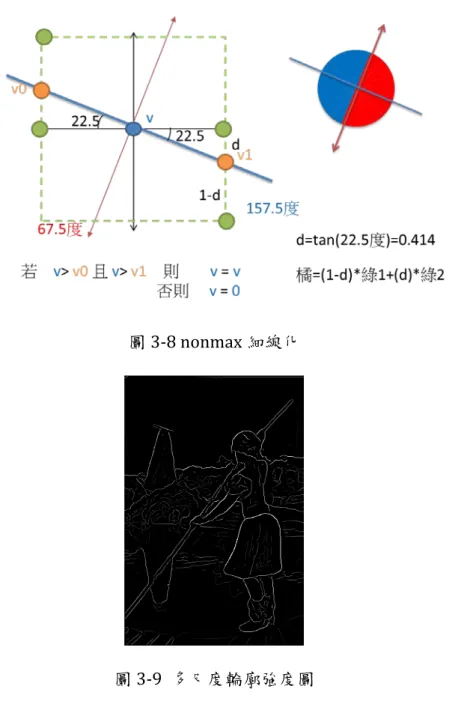
(24) (a). (b). (c). (d). (e). (f). (g). (h). 圖 3-6 所有遮罩對圖 3-3(a)彩色圖作用的結果. 計算影像的紋理梯度,透過如圖 2-13 的 16 種方向遮罩與一個中心遮罩來求出(圖 3-7) ,共有兩種遮罩大小 13x13 與 19x19,總共 34 種遮罩,相當於每一個影像點 有 34 種特徵,利用這 34 種特徵將影像點以 k-mean [15] 分作 64 類視為影像紋 理,同樣再套用圖 3-4 的八種角度遮罩作光影強弱計算,就會是紋理梯度,接著. 圖 3-7 計算影像紋理特徵用的遮罩. 將亮度梯度、色彩梯度、紋理梯度透過不同的權重合併,每個影像點從八個角度 中取出最大值,再以如圖 3-8 的方式做 nonmax 細線化,就可以得到多尺度輪廓 強度圖,如圖 3-9。. 15.
(25) 圖 3-8 nonmax 細線化. 圖 3-9 多尺度輪廓強度圖 利用多尺度輪廓強度來計算每一個影像點在以自身為中心 11x11 範圍與其他影 像點的相似度,點與點之間隔著越強烈的輪廓相似度就越低,如圖 3-10,由此. 16.
(26) 圖 3-10 紅點與綠點有低相似度、與藍點有高相似度. 來得到一個相似度稀疏矩陣𝑊𝑊,大小以寬跟高為 321、481 的影像為例,尺寸會 是 154401x154401,將相似度稀疏矩陣𝑊𝑊每一橫列加總得到一個對角矩陣𝐷𝐷,如. 圖 3-11 相似度稀疏矩陣 W 與對角矩陣 D. 圖 3-11,利用這兩種矩陣解廣義特徵向量與特徵值: (𝑫𝑫 − 𝑾𝑾)𝒗𝒗 = 𝝀𝝀𝝀𝝀𝝀𝝀. (3-3). 取前 17 組對應最小特徵值的特徵向量來產生光譜圖,如圖 3-12 與 3-13,每張. 圖 3-12 取出前 17 組. 17.
(27) 圖 3-13 前六張特徵向量還原的光譜圖. 光譜圖各套用八個角度遮罩(圖 3-14)後加總,做為光譜輪廓強度與亮度梯度、 色彩梯度、紋理梯度透過不同的權重合併,在每個影像點上取出八個方向中的最 大值,就是全域性輪廓強度圖,如圖 3-15。. 圖 3-14 八個角度遮罩. 圖 3-15 全域性輪廓強度圖. 18.
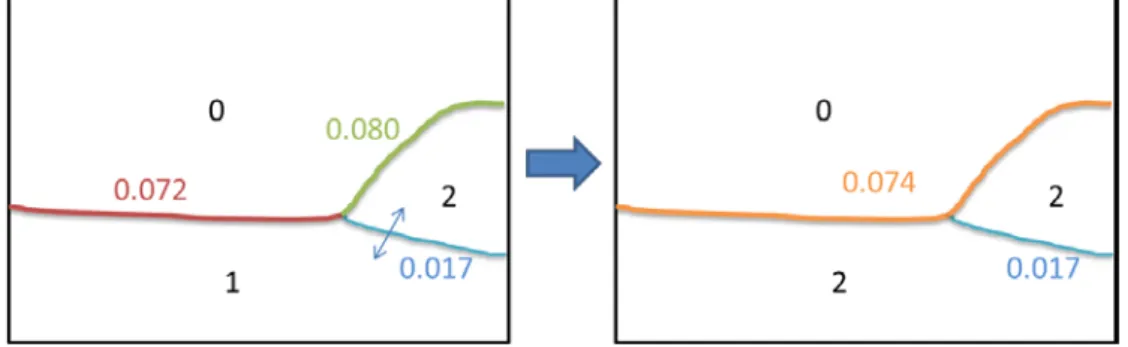
(28) 最後將全域性輪廓強度圖利用分水嶺[29]分出區塊,以區塊與區塊之間的輪廓強 度平均做為權重由小至大做形式上的合併,藉此將區塊與區塊之間的輪廓強度變 為一樣的值,如圖 3-16,就可以得到超度量輪廓圖(Ultrametric Contour Map,UCM),如圖 3-17,值越大越接近白色表示輪廓強度越強。. 圖 3-16 輪廓強度調整. 圖 3-17 超度量輪廓圖(Ultrametric Contour Map,UCM). 3-2 雜訊參數. 超度量輪廓圖(Ultrametric Contour Map,UCM)上的值代表的該位置的輪廓 強度,值越大越接近白色的強度越強,經過調整一整段輪廓都會是同一個強度值, 我們將基於過濾合併後的超度量輪廓圖,利用這些被留下強烈輪廓與區塊大小計 算產生雜訊用的參數,對影像加入適當的雜訊做調整讓重要的資訊從背景中突 顯。. 19.
(29) 先將超度量輪廓圖上的輪廓由弱至強一條一條慢慢移除合併至 10 個區塊, 以 Two-Pass 算法[30]做連通區塊的判斷,以左到右、上到下的方式掃描影像點, 若該影像點不為輪廓,即輪廓強度為 0,則判斷自己的上下左右鄰居是否有被標 記過,沒有就給自己一個新的標記值,如果上下左右鄰居有被標記過的點,將其 中最小的標記賦予自己,並記錄各種標記的相等關係,最後將有相等關係的標記 視為同一個連通區塊標記為關係中最小的標記值,如圖 3-18 所示。. 圖 3-18 Two-Pass 連通算法. 以上述這樣的方式判斷合併區塊的數量,合併前後的區塊與輪廓如圖 3-19,區 塊的標記依區塊大小標示,越大塊的區塊會加入越多的雜訊,如圖 3-20(a),接 著我們認為在輪廓周圍的區間應該以輪廓強度來判斷加入雜訊的程度,越強烈的 輪廓周圍加入的雜訊越少,如圖 3-20 (b),將兩者做結合,就可以得到用來產 生雜訊用的雜訊參數,範圍在 0~1 之間,如圖 3-20(c)。. 20.
(30) (a). (b). (c). (d). (e). (f). 圖 3-19 (a)未過濾的 ucm (b)未過濾的 ucm 輪廓數 (c)未過濾 ucm 的區塊 (d)過濾後 ucm (e)過濾後 ucm 的輪廓數 (f)過濾後 ucm 區塊. (a). (b) 圖 3-20 (a)區塊參數 (b)輪廓參數 (c)兩者合併 21. (c).
(31) 3-3 以雜訊進行背景調整 為了提升多值化效果,我們利用超度量輪廓圖導出上一節得到雜訊參數來對 影像背景加入雜訊做調整避免影像非重要輪廓的部分突出影響多值化法的判斷, 雜訊參數的使用如公式 3-4:. 雜訊標準差 = 5 + 10 �. 1 + 𝑒𝑒. 1. −10∗(雜訊參數−0.5) 2. �. (3-4). 參數越大會反應越大的標準差,標準差範圍在 5~15 之間,利用雜訊標準差產生 常態分佈的隨機數當作雜訊(圖 3-21(b))加入原影像做影像調整,如圖 3-21(c) 。. (a). (b) 圖 3-21 (a)原影像 (b)雜訊 (c)雜訊影像. 22. (c).
(32) 第四章 以輪廓指引為基礎之頻域濾波 上一章節我們基於超度量輪廓圖(Ultrametric Contour Map,UCM) [21-23] 對影像加入雜訊做影像調整,在這個章節會說明如何以超度量輪廓圖所建立的濾 波評估圖,評估頻域濾波的有效性,降低影像光影的影響。. 4-1 濾波評估圖 對影像進行頻域濾波需要有一個分辨濾波效果好壞的手段,於是我們建立濾 波評估圖來判斷該次濾波對影像的調整是否有效,基於超度量輪廓圖,以如上一 章節同樣的手法做過濾輪廓,為了保留較多的輪廓,在這一章節會將區塊合併至 50 個來做輪廓篩選,在每一個輪廓的垂直方向找到兩個對稱區塊,如圖 4-1,藍 色點與綠色點介於輪廓的兩側,對每個輪廓產生兩個如此的濾波評估點,希望在 濾波時能夠將輪廓周圍突顯出來。. 圖 4-1 濾波評估點. 對於濾波評估點,我們考慮將輪廓依強度分別一條一條分段處理,將一條輪 廓段開分成好幾小段,每一小段的輪廓點各自在垂直方向套用一個 9x9 的高斯遮 罩(圖 4-2)計算灰階平均值當作濾波評估點,然後計算該小段輪廓兩邊評估點的 平均值,將大的一邊分為綠色,小的分為藍色,如圖 4-3 為前六條強烈的輪廓的 濾波評估點。. 23.
(33) 圖 4-2 9x9 的高斯遮罩. 圖 4-3 前六條強烈輪廓的濾波評估點. 將所有輪廓的濾波評估點處理合併後,可以得到目標的濾波評估圖,如圖 4-4(a),在處理小段輪廓兩邊評估點時,如何分辨哪些點是同一邊,我們利用向 量外積來做判斷,方法如圖 4-5。. 24.
(34) (a). (b). 圖 4-4 (a)濾波評估圖 (b)重疊在灰階圖上顯示. 圖 4-5 向量外積分兩邊. p1、p2 為輪廓垂直方向的兩點,向量 V1 為輪廓前進方向的向量,向量 V2 由垂直方向的兩點計算,透過向量 V1 對象量 V2 做外積的 Z 分量,無論兩點誰為 頭尾,都可以正確地分邊。 有了濾波評估圖,還需要一個標準來評估濾波的效果,我們使用公式 4-1 來計算濾波評估圖藍色與綠色的區隔分數: (𝜇𝜇𝐺𝐺 − 𝜇𝜇𝐵𝐵 )2 區隔 Score = 𝜎𝜎𝐺𝐺2 + 𝜎𝜎𝐵𝐵2. 25. (4-1).
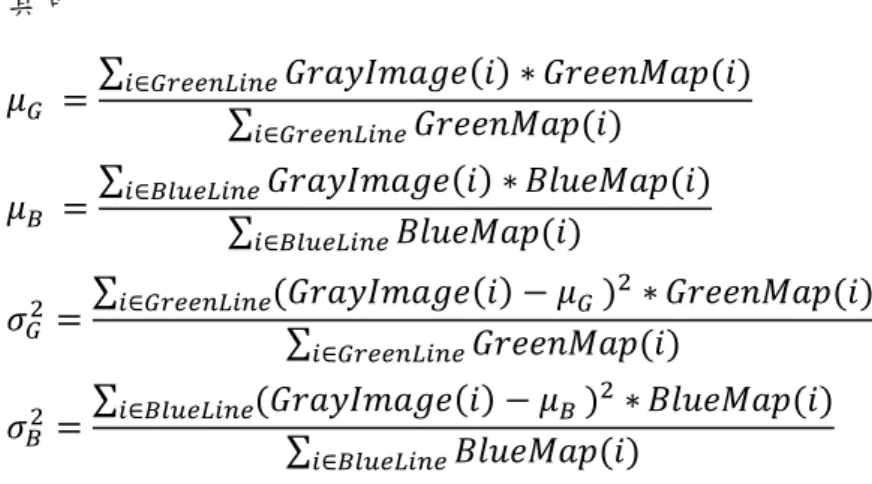
(35) 其中 𝜇𝜇𝐺𝐺 =. ∑𝑖𝑖∈𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺 𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺(𝑖𝑖) ∗ 𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺(𝑖𝑖) ∑𝑖𝑖∈𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺 𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺(𝑖𝑖). 𝜎𝜎𝐺𝐺2 =. ∑𝑖𝑖∈𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺(𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺(𝑖𝑖) − 𝜇𝜇𝐺𝐺 )2 ∗ 𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺(𝑖𝑖) ∑𝑖𝑖∈𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺 𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺(𝑖𝑖). 𝜇𝜇𝐵𝐵 =. 𝜎𝜎𝐵𝐵2 =. ∑𝑖𝑖∈𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵 𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺(𝑖𝑖) ∗ 𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵(𝑖𝑖) ∑𝑖𝑖∈𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵 𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵(𝑖𝑖). ∑𝑖𝑖∈𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵(𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺𝐺(𝑖𝑖) − 𝜇𝜇𝐵𝐵 )2 ∗ 𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵(𝑖𝑖) ∑𝑖𝑖∈𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵 𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵𝐵(𝑖𝑖). GreenMap 與 BlueMap 如圖 4-6(b),(c)所示,GreenLine 和 BlueLine 各自為 Map. (a). (b). (c). 圖 4-6 (a)濾波評估圖 (b)GreenMap (c)BlueMap. 上有值的部分,GrayImage 為灰階圖,𝜇𝜇𝐺𝐺 、𝜇𝜇𝐵𝐵 為灰階圖在 GreenLine 與 BlueLine. 上的平均值,𝜎𝜎𝐺𝐺 、𝜎𝜎𝐵𝐵 為灰階圖在 GreenLine 與 BlueLine 上的標準差,利用公. 式 4-1 來計算區隔分數,我們希望濾波後輪廓兩邊的差異越大越好,且兩邊各自 的離散度越小越好。 輪廓點垂直方向上的濾波點間距,我們使用三種距離動態調整,選擇哪一種 間距則配合公式 4-1 來做選擇最適合的距離,三種間距示意如圖 4-7。. 26.
(36) (a). 4-2 頻域濾波. (b). (c). 圖 4-7 (a)間距 2 (b)間距 3 (c)間距 4. 利用上一節得出的濾波評估圖,可以用來檢視該次濾波是否為有幫助的濾波, 頻域濾波指的是利用傅立葉轉換(Fourier Transform) [24]將影像由空間域轉至 頻率域,從頻域將頻譜值移除後再由頻率域轉回空間域,在頻率域,低頻代表的 是影像變化和緩的部分,通常是背景,高頻則是影像變化劇烈的部分,可以看作 輪廓,頻譜值會直接反映影像的光影分布,如圖 4-8(b)為圖 4-8(a)的一個低頻. (a). (b). (c). 圖 4-8 (a)原影像 (b)轉回空間域的低頻頻譜值 (c)移除該頻譜值後影像. 頻譜值轉換回空間域後做正規化後的影像,從圖 4-8(a)將該頻譜值移除後轉空 間域後,可以得到如圖片 4-8(c)結果,相當於從原影像移除與該頻譜值有關的 資訊,藉此達到濾波的效果,原影像濾波結果如圖 4-9(c),並且考慮比較移除 整個頻譜值與移除頻譜值的一半做調整,使用輪廓指引為基礎之頻域濾波影像多 27.
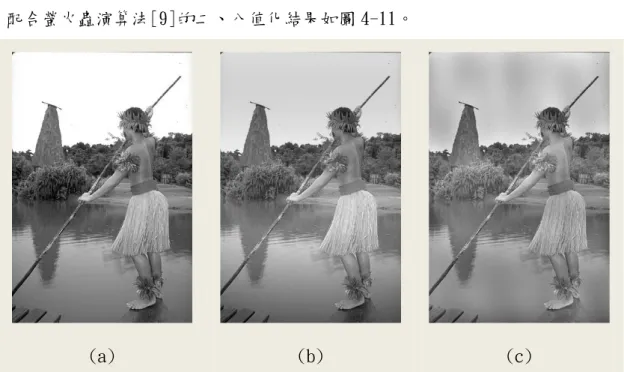
(37) 值化方法流程如圖 4-10,原影像與本論文方法處理後影像使用 Cluster_Otsu[6] 配合螢火蟲演算法[9]的二、八值化結果如圖 4-11。. (a). (b). (c). 圖 4-9 (a)原影像 Score=1.032 (b)濾掉一個頻譜值 Score=1.283 (c)原影像過濾完 Score=1.801. 圖 4-10 使用輪廓指引為基礎之頻域濾波影像多值化方法 28.
(38) (a). (c). (e). (b). (d). (f). 圖 4-11 (a)原影像 (b)論文方法處理影像 (c)圖(a)使用 Otsu 做二值化. (d)圖(b)使用 Otsu 做二值化 (e)圖(a)使用 Otsu 搭配螢火蟲算法做八值化 (f)圖(b) 使用 Otsu 搭配螢火蟲算法八值化. 29.
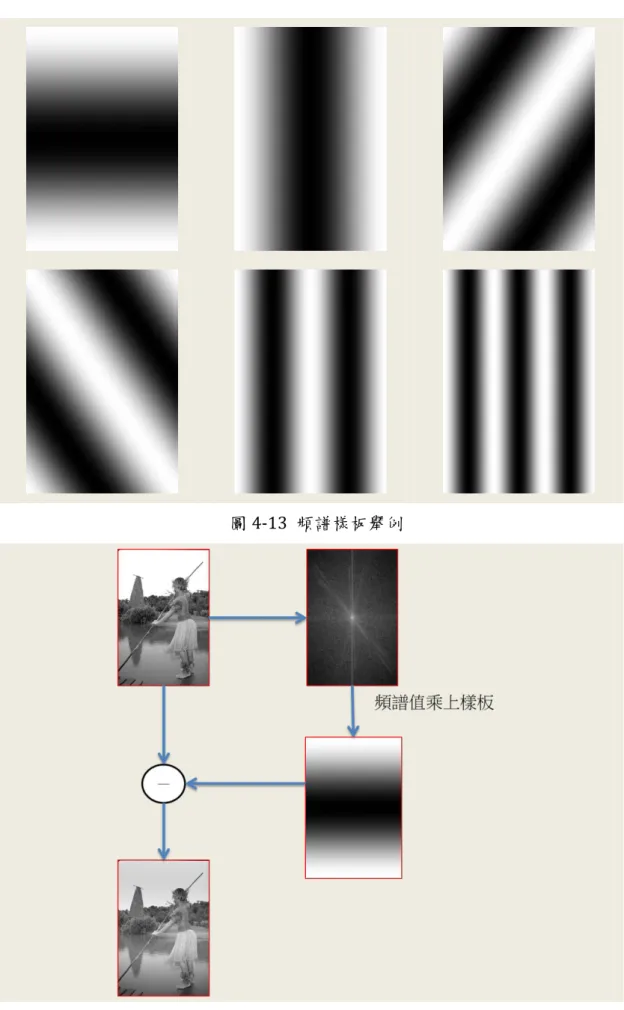
(39) 4-3 頻譜樣板 在空間域與頻率域頻繁的轉換會花費相當多的時間,於是我們透過事先建立 頻譜樣板直接在空間域做頻域濾波減少頻繁轉換花費掉的時間。 建立頻譜樣板是將該頻譜對應的相同位置上填入 1 當作頻譜值,其他都是 0 後由頻率域轉至空間域當作該位置的頻譜樣板,如圖 4-12,圖 4-13 為幾種頻譜 值樣板的範例,使用上僅需將影像由空間域轉至頻率域一次,之後直接頻譜樣板 乘上影像在頻率域的頻譜值做頻譜樣板的調整,將影像減去調整後的頻譜樣板就 可以直接在空間域做頻域濾波,示意如圖 4-13。. 圖 4-12 建立頻譜樣板. 30.
(40) 圖 4-13 頻譜樣板舉例. 圖 4-14 頻譜樣板使用示意 31.
(41) 第五章 實驗結果 5-1 多值化效果比較 柏克萊大學 Computer Vision Group 的輪廓偵測評估資料集 BSDS [28]中提 供了一套方法來評估輪廓偵測的好壞,該資料集中有 300 張彩色測試圖,如圖 5-1 從 300 張測試圖中提出 9 張當範本,這些測試圖在資料集中都有數張對應的 人為框出來的輪廓,以圖 5-1(a)為例,有如圖 5-2 的五張不同使用者人為框出 來的輪廓,透過這些輪廓合併的 Groundtruth(圖 5-3)是人類在意的主題輪廓結 合,希望在輪廓偵測時將這些輪廓顯現出來,也是資料及評分的依據,圖 5-1 九張範本的 Groundtruth 如圖 5-4,無論是彩色圖、灰階圖、多值圖,都可以計 算出超度量輪廓圖(Ultrametric Contour Map,UCM)[21-23],圖 5-5 為 9 張範本 彩色圖計算出來的超度量輪廓圖,圖 5-6 為將 9 張範本彩色圖灰階化的灰階圖, 同樣可以計算出 9 張灰階圖的超度量輪廓圖如圖 5-7。 BSDS 資料集中對輪廓的評價,是將超度量輪廓圖對上 GroundTruth 來計算 Precision 跟 Recall,再由 Precision 跟 Recall 計算出 F-Measure 分數,以 F-Measure 分數評價輪廓的好壞,計算方式如下: 𝐹𝐹 − 𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀分數. =. 2 ∗ 𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃 ∗ 𝑅𝑅𝑅𝑅𝑅𝑅𝑅𝑅𝑅𝑅𝑅𝑅 𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃 + 𝑅𝑅𝑅𝑅𝑅𝑅𝑅𝑅𝑅𝑅𝑅𝑅. (5-1). 300 張測試圖整體的𝐹𝐹 − 𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀分數則是每一張測試圖的𝐹𝐹 − 𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀分數加. 總平均,以圖 5-1(a)為例,圖 5-8(a)為彩色圖、5-8(b)為彩色圖的 UCM、5-8(c) 為灰階圖、5-8(d)為灰階圖的 UCM、5-8(e)為 GroundTruth,利用彩色圖的 UCM 去對 GroundTruth 計算分數,可以得到𝐹𝐹 − 𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀分數為 0.849,以灰階圖的 UCM 去對 GroundTruth 計算𝐹𝐹 − 𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀分數為 0.842,表 5-1 為比較九張範例. 圖彩色與灰階的分數差異,會發現彩色圖灰階化後分數有下降的趨勢,這是因為 影像的資訊變少了讓導致沒有偵測出正確的輪廓,導致結果變差。. 32.
(42) (b). (a). (c). (e). (d). (f). (h). (g). (i) 圖 5-1 取出 9 張資料集彩色圖作為範本 33.
(43) 圖 5-2 由五個不同使用者人為對圖 5-1(a)彩色圖框出來的重要輪廓. 圖 5-3 由圖 5-2 的五張輪廓合成 GroundTruth. 34.
(44) (b). (a). (c). (e). (d). (f). (h). (g). (i) 圖 5-4 圖 5-1 的 9 張範本對應的 GroundTruth 35.
(45) (b). (a). (c). (e). (d). (f). (h). (g). (i) 圖 5-5 圖 5-1 的 9 張範本彩色圖的超度量輪廓圖 36.
(46) (b). (a). (c). (e). (d). (f). (h). (g). (i) 圖 5-6 圖 5-1 的 9 張範本彩色圖灰階化 37.
(47) (b). (a). (c). (e). (d). (f). (h). (g). (i) 圖 5-7 圖 5-6 的 9 張灰階圖的超度量輪廓圖 38.
(48) 表 5-1 彩色圖與灰階圖分數比較 彩色圖. 灰階圖. (a). 0.849. 0.842. (b). 0.911. 0.920. (c). 0.841. 0.813. (d). 0.762. 0.766. (e). 0.893. 0.887. (f). 0.799. 0.776. (g). 0.887. 0.878. (h). 0.634. 0.608. (i). 0.888. 0.878. 藉由柏克萊大學的輪廓偵測評估資料集 BSDS,我們比較原灰階圖與本論文 方法處理後的灰階圖使用 Otsu [6]搭配螢火蟲演算法[9]做多值化的效果,以圖 5-8(a)的原灰階圖與圖 5-8(b)的論文方法處理後灰階圖為例,圖 5-9 為兩者的 四值化效果,圖 5-10 為四值圖處理出來的 UCM,以原灰階圖處理的四值圖的 UCM 去對 GroundTruth (圖 5-4(a))計算𝐹𝐹 − 𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀分數為 0.757,以論文方法處理. 的四值圖的 UCM 去對 GroundTruth (圖 5-4(a))計算𝐹𝐹 − 𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀分數為 0.784,. 圖 5-8(a)的多值化結果如圖 5-11、UCM 如圖 5-13,圖 5-8(b)的多值化結果如圖 5-12、UCM 如圖 5-14,灰階圖(圖 5-8(a))與論文方法處理後灰階圖(圖 5-8(b)) 的𝐹𝐹 − 𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀分數如表 5-2,灰階圖與論文方法處理後灰階圖在 300 張測試圖 的整體𝐹𝐹 − 𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀𝑀分數如表 5-3,在表 5-3 本論文方法處理的灰階圖做四值化. 的整體分數為 0.668,明顯於原灰階圖做四值化的分數 0.633,再以圖 5-15 為例, 以本論文方法處理過的灰階圖做四值化後輪廓偵測的效果在視覺上也感覺得出 優於原灰階圖做四值化後的輪廓偵測效果,顯示利用本論文方法對影像調整後再 進行多值化,的確有助於多值化效果的提升。 39.
(49) 圖 5-8 (a)原影像灰階圖 (b)論文方法處理後灰階圖. 圖 5-9 (a)原影像灰階圖四值化 (b) 四值圖的超度量輪廓圖. 圖 5-10 (a) 論文方法處理後灰階圖四值化 (b) 四值圖的超度量輪廓圖 40.
(50) (a). (b). (c). (d). (e). (f). (g). (h). 圖 5-11 (a)原灰階圖 (b) 圖(a)用 Cluster_Otsu 做二值化 (c) 圖(a)用. Cluster_Otsu 做三值化 (d) 圖(a)用 Cluster_Otsu 做四值化 (e) 圖(a)用 Cluster_Otsu 做五值化 (f) 圖(a)用 Cluster_Otsu 做六值化 (g) 圖(a)用 Cluster_Otsu 做七值化 (h) 圖(a)用 Cluster_Otsu 做八值化. 41.
(51) (a). (b). (c). (d). (e). (f). (g). (h). 圖 5-12 (a)論文方法處理後灰階圖 (b) 圖(a)用 Cluster_Otsu 做二值化 (c) 圖(a) 用 Cluster_Otsu 做三值化 (d) 圖(a)用 Cluster_Otsu 做四值化 (e) 圖(a)用 Cluster_Otsu 做五值化 (f) 圖(a)用 Cluster_Otsu 做六值化 (g) 圖(a)用 Cluster_Otsu 做七值化 (h) 圖(a)用 Cluster_Otsu 做八值化. 42.
(52) (a). (b). (c). (d). (e). (f). (g). (h). 圖 5-13 (a)GroundTruth (b)原灰階圖二值化的超度量輪廓圖 (c)原灰階圖三值 化的超度量輪廓圖 (d)原灰階圖四值化的超度量輪廓圖 (e)原灰階圖五值化的. 超度量輪廓圖 (f)原灰階圖六值化的超度量輪廓圖 (g)原灰階圖七值化的超度量 輪廓圖 (h)原灰階圖八值化的超度量輪廓圖. 43.
(53) (a). (b). (c). (d). (e). (f). (g). (h). 圖 5-14 (a)GroundTruth (b)論文方法處理後灰階圖二值化的超度量輪廓圖 (c). 論文方法處理後灰階圖三值化的超度量輪廓圖 (d)論文方法處理後灰階圖四值. 化的超度量輪廓圖 (e)論文方法處理後灰階圖五值化的超度量輪廓圖 (f)論文方 法處理後灰階圖六值化的超度量輪廓圖. (g)論文方法處理後灰階圖七值化的超. 度量輪廓圖 (h)論文方法處理後灰階圖八值化的超度量輪廓圖 44.
(54) 表 5-2 圖 5-8(a)與圖 5-8(b)以 Otsu 做多值化的 F-Measure 分數 圖 5-8(a). 圖 5-8(b). (原灰階圖). (論文方法處理的灰階圖). 2. 0.507. 0.755. 3. 0.798. 0.760. 4. 0.757. 0.784. 5. 0.750. 0.803. 6. 0.779. 0.824. 7. 0.784. 0.817. 8. 0.805. 0.828. N值化. 表 5-3 原灰階圖與論文處理灰階圖以 Otsu 做多值化的 300 張測試圖整體 F-Measure 分數 N值化. 原灰階圖. 論文處理過的灰階圖. 2. 0.559. 0.609. 3. 0.616. 0.659. 4. 0.633. 0.668. 5. 0.646. 0.673. 6. 0.651. 0.673. 7. 0.661. 0.674. 8. 0.668. 0.674. 45.
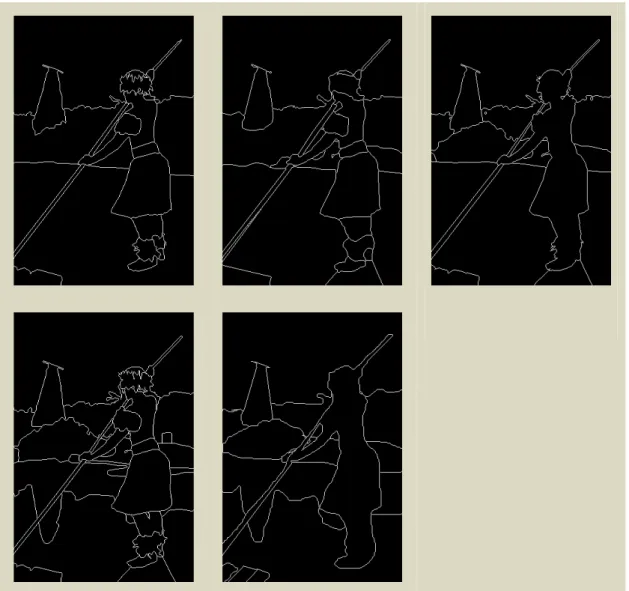
(55) (a). (b). (c). (d). (e). (f). (g). 圖 5-15 輪廓偵測視覺上的比較 (a)GroundTruth (b)原灰階圖 (c)論文方法處理 後灰階圖 (d)原灰階圖四值化 (e)論文方法處理過後灰階圖四值化 (f)圖(d)四 值圖的超度量輪廓圖,分數 0.469 (g)圖(e)四值圖的超度量輪廓圖,分數 0.715 46.
(56) 5-2 頻域濾波加速 在第四章第三節,我們提出一個減少空間域與頻率域之轉來回轉換時間的 頻域濾波方法,透過建立頻譜樣板,僅需將待濾波影像轉至頻率域一次,之後便 可利用頻譜樣板與頻譜值在空間域做頻域濾波,節省了相當多的時間,如圖 5-16 經歷了 85 次的濾波,4-2 節來回轉換濾波時間約 5.8 秒、4-3 節頻譜樣板濾波約 3 秒,圖 5-17 則經歷了 421 次的濾波,兩種方法濾波時間各約 22.9 秒、14.7 秒,濾波時間的比較如表 5-4,使用的設備環境如表 5-5。. (a). (b) 圖 5-16 (a)過濾前 (b)過濾後. (a). (b) 圖 5-17 (a)過濾前 (b)過濾後 表 5-4 濾波時間比較 來回轉換濾波. 利用頻譜樣板濾波. 300 張測試圖. 約 67 分鐘. 約 37 分鐘. 平均一張. 13.4 秒. 7.3 秒. 47.
(57) 表 5-5 設備環境 系統. Windows 7 x64 專業版. CPU. I5-3337U 1.90GHz. 記憶體. 8GB. 軟體. Matlab R2013a. 48.
(58) 第六章 結論 本論文是提出一個透過調整影像內容的前置處理法,用以提高現有的多值化 法的多值化效果,多值化的優點是降階後能保留更多的特徵,如水果的壓傷位置、 腦袋腫瘤的大小在二值化都有可能會消失,多值化則有較高的機會描述這些特徵 ,但有優點也有缺點,多值化本身有難做的點如相當冗長的計算時間,但是有最 佳化演算法做搭配的話,就能夠達到壓縮計算時間並保持原有品質的效果,多值 化本身也沒有一個絕對評判效果好壞的機制,我們間接透過輪廓偵測來判斷多值 化的效果優劣,會做輪廓偵測通常有後續的目的,如果能提高邊緣偵測的準確度, 也算是提高了多值化的價值。 本論文的影像調整是基於影像的重要輪廓做背景區塊的處理與頻域濾波的 依據,影像常常有複雜的背景掩蓋了物件或光影干擾等問題,藉由擾亂背景資訊 與濾波處理明暗問題讓包裹重要資訊的輪廓能夠在影像中突顯,希望以這樣的方 式讓多值化時能夠真正的顯現重要的資訊來做後續利用,以輪廓偵測來評估,數 據上也反映了我們的期待,濾波也利用頻譜樣板優化縮短原本需要在空間域與頻 率域之間的頻繁轉換的運算時間,希望多值化也能夠使用在更多與時間賽跑的應 用上。. 49.
(59) 參考文獻 [1] Zhang Tailing, Deng Jizhong, "Application of Computer Vision to the Detection of Pear’s Bruising" Transactions of the Chinese Society of Agricultural Engineering 15.1 205-209 (1999) [2] Juang Puu-An, Wu Ming-Ni, Shiu Jen-Yun, Yan Hong-Yuan, "Brain tumor segmentation based on otsu clustering with multi-thresholding method" National Computer Symposium 12-20~21 (2007) [3] Li Kai, Chen Li-An, Cao Jichang, "ID card number identification based on gray scale multi-level" Computer Engineering and Applications 51 191-196 (2015) [4] Syu Shin-Syong, "A study of white light interference detection system based on texture analysis and fuzzy theory"國立交通大學電控工程系 碩士論文 (2011) [5] M.Sezgin and B.Sankur , "Survey over image thresholding techniques and quantitative performance evaluation" Journal of Electronic Imaging 13.1 146-165 (2004) [6] N.Otsu, "A threshold selection method from gray level histograms" IEEE Transactions on Systems, Man, and Cybernetics 62-66 (1979) [7] J.N.Kapur, P.K.Sahoo, and A.K.C.Wong, "A new method for gray-level picture thresholding using the entropy of the histogram" Computer Vision, Graphics,and Image Processing 29 273-285 (1985) [8] J.Kennedy and R.Eberhart, "Particle Swarm Optimization" Proceedings of IEEE International Conference on Neural Networks 1942–1948. (1995) [9] Yang Xin-She, "Nature-inspired metaheuristic Algorithms Second Edition" ISBN:9781905986286 81-89 (2010) [10]Chen kai,Chen Fang, Dai min ,Zhang zhi-sheng and Shi jin-fei , "Fast image segmentation with multilevel threshold of two-dimensional entropy based on firefly algorithm" Optics and Precision Engineering 22 (2014) [11]https://en.wikipedia.org/wiki/Peak_signal-to-noise_ratio [12]N.Sri Madhava Raja, V.Rajinikanth and K.Latha, "Otsu based optimal multilevel image thresholding using firefly algorithm" Hindawi 50.
(60) Publishing Corporation Modelling and Simulation in Engineering Volume (2014) [13]S.Arora, J.Acharya, A.Verma, Prasanta K.Panigrahi, "Multilevel thresholding for image segmentation through a fast statistical recursive algorithm" Pattern Recognition Letters 29 119-125 (2008) [14]Liu Dong-ju, Yu Jian, "Otsu method and K-means" Ninth International Conference on Hybrid Intelligent Systems (2009) [15]http://mirlab.org/jang/books/dcpr/dcKMeans.asp?title=3-3%20K-mean s%20Clustering [16]Lin Yi-Guei, "Multilevel Image Thresholding and Handwritten Chinese Character Recognition by Support Vector Machines" 國立屏東大學資訊 工程系碩士論文 (2011) [17]https://en.wikipedia.org/wiki/Sobel_operator [18]http://www.csie.ntu.edu.tw/~cjlin/libsvm/ [19]http://www.cmlab.csie.ntu.edu.tw/~cyy/learning/tutorials/SVM2.pdf [20]Kuan Chung-Chun, "Contour-guided image binarization by frequency filtering" 國立屏東大學資訊工程系碩士論文 (2013) [21]P.Arbelaez, M.Maire, C.Fowlkes and J.Malik. "Contour detection and hierarchical image segmentation" IEEE Transactions on Pattern Analysis and Machine Intelligence 33 898-916 (2011). [22]P.Arbelaez, et al. "From contours to regions: An empirical evaluation" Computer Vision and Pattern Recognition (2009) [23]M.Maire, et al. "Using contours to detect and localize junctions in natural images." Computer Vision and Pattern Recognition (2008) [24]H.Cormen, E.Leiserson, L.Rivest and C.Stein , "Introduction to algorithms Third Edition" ISBN:9780262033848 (2009) [25]J.Canny, "A computational approach to edge detection" IEEE Transactions on Pattern Analysis and Machine Intelligence 6 679-698 (1986) [26]J.M.S.Prewitt, "Object enhancement and extraction " In Picture Processing and Psychopictorics (1970) [27]L.G.Roberts, "Machine perception of three-dimensional solids" In Optical and Electro-Optical Information Processing (1965) 51.
(61) [28]http://www.eecs.berkeley.edu/Research/Projects/CS/vision/grouping /segbench/ [29]L.Najman and M.Schmitt, "Geodesic saliency of watershed contours and hierarchical segmentation" IEEE Transactions on Pattern Analysis and Machine Intelligence 18 1163-1173 (1996) [30]L.Shapiro, G.Stockman, "Computer Vision" ISBN:9780130307965 69-73 (2002). 52.
(62)
數據
![圖 3-2 groundtruth 建立多尺度輪廓強度圖是將影像分為亮度、色彩、紋理三種特徵各自分為多 個量級,根據明暗的差距來找出輪廓再透過不同的權重合併而來。 多尺度輪廓強度圖的計算會使用到 Lab 色彩空間,Lab 色彩空間是由國際照 明協會所提出,其中 L 代表亮度,範圍在[0,100],a 和 b 則是色彩,a 用來描述 綠色到紫紅色,範圍在[-500,500],b 則是描述藍色至黃色,範圍在[-200,200], RGB 色彩空間轉換至 Lab 色彩空間需要經由 XYZ 色彩空間,首](https://thumb-ap.123doks.com/thumbv2/9libinfo/9011721.297579/22.892.353.537.200.479/色彩空間Lab色彩空間是由國際明協會所提出其中代表範圍色彩空間.webp)
+7


Outline
相關文件
Reading Task 6: Genre Structure and Language Features. • Now let’s look at how language features (e.g. sentence patterns) are connected to the structure
好了既然 Z[x] 中的 ideal 不一定是 principle ideal 那麼我們就不能學 Proposition 7.2.11 的方法得到 Z[x] 中的 irreducible element 就是 prime element 了..
volume suppressed mass: (TeV) 2 /M P ∼ 10 −4 eV → mm range can be experimentally tested for any number of extra dimensions - Light U(1) gauge bosons: no derivative couplings. =>
For pedagogical purposes, let us start consideration from a simple one-dimensional (1D) system, where electrons are confined to a chain parallel to the x axis. As it is well known
The observed small neutrino masses strongly suggest the presence of super heavy Majorana neutrinos N. Out-of-thermal equilibrium processes may be easily realized around the
• CEPC design has to maintain the possibility for SPPC, but there is no need now to firmly prove the feasibility of SPPC,.. scientifically
incapable to extract any quantities from QCD, nor to tackle the most interesting physics, namely, the spontaneously chiral symmetry breaking and the color confinement..
(1) Determine a hypersurface on which matching condition is given.. (2) Determine a
