應用可規劃程式閘陣列設計斜面直線倒單擺甩上及平 衡之比例積分微分控制器及模糊控制器
施慶隆 范揚欣
台灣科技大學電機工程系
陳茂林
建國科技大學電機工程系
摘 要
直線倒單擺系統為一個非線性不穩定且具有非極小相位特性之系統,因而 被廣泛的用於驗證各種線性及非線性控制系統理論。本文之目的為設計嵌入式 系統以及使用可規劃程式閘陣列設計比例積分及微分控制器與模糊控制器實 現斜面直線倒單擺甩上及平衡控制;其控制目標為先將倒單擺由初始下垂位置 逐漸甩上至垂直位置附近,然後隨即控制倒單擺於滑台某特定點處維持平衡。
經由電腦模擬及實驗結果可驗證明本文所設計的控制器可以成功有效率地達 到預期的控制目標。
關鍵詞:倒單擺控制、比例積分及微分控制器、模糊控制器、可規劃程式閘陣 列、嵌入式系統。
SWING UP AND BALANCING CONTROL OF A SLOPED LINEAR INVERTED PENDULUM BY USING FPGA PID/FUZZY CONTROLLERS
Ching-Long Shih Yang-Hsin Fan Department of Electrical Engineering National Taiwan University of Science and Technology
Taipei, Taiwan 106, R.O.C.
Mao-Lin Chen Department of Electrical Engineering
Chienkuo Technology University Changhua, Taiwan 500, R.O.C.
Key Words: inverted pendulum control, PID, fuzzy controller, FPGA, embedded system.
ABSTRACT
A linear inverted pendulum system is a nonlinear, unstable system that has non-minimum phase characteristics and it has been widely used to demonstrate the effectiveness of linear/nonlinear control theorem. The purpose of this study is to design a Nios embedded system and FPGA PID/Fuzzy controllers to swing up a sloped linear inverted pendulum from
the stationary hanging state to the upright position and follow by balancing it about the vertical position and positioning the cart in the desired position.
Computer simulations and experimental results are performed to illustrate the feasibility and effectiveness of the proposed control methods.
一、前 言
長久以來具有非線性與不穩定特性的倒單擺控制系統 之控制方法均受到全世界廣泛的探討。一維倒單擺控制系 統如直線倒單擺、旋轉倒單擺、輪型倒單擺以及單輪倒單 擺等等在文獻上更是十分普遍。通常倒單擺系統的控制目 標為將倒單擺由初始下垂位置甩上至直立位置然後隨即維 持平衡及定位,因此在倒單擺系統的控制策略上通常分為 甩上控制器以及平衡定位控制器[1,2]。對於倒單擺甩上控 制器的研究中,最著名當數Astromom 及 Furuta[3]所提的 Lyapunov 能量控制法,他們證明能量控制法可以收斂並成 功的應用於甩上任務。常見典型的倒單擺控制方法有物理 能 量 變 化 法[1,3,4] 、 線 性 回 授 控 制 [5-7] 、 非 線 性 控 制 [8-10]、強健控制[11]、可變結構控制[12]以及模糊控制[13]
等等。然而文獻上對於斜面直線倒單擺控制問題的討論卻 十分罕見。
本文針對斜面直線倒單擺系統之甩上與維持平衡及定 位控制問題進行系統分析、控制器設計以及體實現。在甩 上的控制策略中,我們以 Lyapunov 能量法[3]為基礎並加 上滑台的比例積分及微分控制器(PID)或模糊定位控制使 得在進行甩上控制任務的同時還可以兼顧到滑台的定位控 制以有利於下一步平衡及定位控制任務的執行。接著維持 倒單擺平衡及定位的控制器則使用狀態回授控制器或模糊 -PD 控制器。狀態回授控制器以極點配置法所設計的增益 參數為參考值,然後配合實驗結果進行微調。模糊-PD 控 制器則以狀態回授控制器之響應結果為參考來調整模糊控 制器的控制規則庫及參數。最後我們使用可規劃程式閘陣 列(FGPA)來實現 PID 與模糊控制器以及週邊硬體電路並 使用Nios 嵌入式系統為控制核心以建立起與 PC 之間的串 列通訊。
本文之組織架構如下:第1 節為簡介、第 2 節描述斜 面直線倒單擺系統的數學模型、第3 節說明倒單擺甩上控 制器的設計原理、第4 節說明倒單擺維持平衡及滑台定位 之控制器設計、第5 節為 FPAG 控制器的實現、第 6 節為 電腦模糊與實驗結果以及第7 節為本文之結論。
二、數學模型
本節描述如圖 1(a)所示之斜面直線倒單擺系統之數學
表一 斜面直線倒單擺系統參數表
參數 數值
α (rad) 0.2618 (15°)
r (m) 0.25 I (kg-m2) 16.87×10-3
M (kg) 0.943
m(kg) 0.057 B (N-sec/m) 0.234
Kt (N/V) 0.148
g(m/sec2) 9.8
(a) 實體圖
(b) 示意圖
圖1 斜面直線倒單擺控制系統。(a)實體圖;(b)示意圖
模型。首先定義斜面直線倒單擺系統之輸入輸出變數與系 統參數(參考圖1(b))。斜面直線倒單擺系統之輸入變數為 馬達電流驅動器輸入電壓u(t),輸出變數為滑台位置x(t)
表二 倒單擺甩上模糊控制規則表
∆ e
NB NM NS ZE PS PM PB NB PB PB PM PS PS PS ZE NM PB PM PS PS PS ZE NS NS PM PS PS PS ZE NS NS ZE PS PS PS ZE NS NS NS PS PS PS ZE NS NS NS NM PM PS ZE NS NS NS NM NB
e
PB ZE NS NS NS NM NB NB
圖2 斜面直線倒單擺甩上控制系統方塊圖
以及倒單擺與垂直軸方向之角度θ(t)。經由 Euler-Lagrange 方程式我們可求得斜面直線倒單擺之動力方程式並如下所 示,
) sin(
) cos(
)
(m+M x&&−mr
θ
&&θ
−α
+mrθ
&2θ
−α
xB u K g
M
m+ = t − &
+( ) sin
α
(1)0 sin )
cos(
)
(I+mr2 θ&&−mrx&& θ−α −mrg θ= (2)
其中系統參數m (kg)為擺桿質量、r(m)為擺桿質心到端點 的長度、I ( kg-m2 )為擺桿轉動慣量、M (kg)為滑台質量、B (N-sec/m)為滑台黏滯係數、Kt為 馬 達 作用 力常 數以 及
α(rad)為斜面的角度。以圖 1(a)所示之實際斜面直線倒單 擺控制系統為例其系統參數之量測值或估測值如表一所 示。
三、甩上控制器
本節說明斜面直線倒單擺由下垂位置甩上至垂直位置 之甩上控制器設計原理。為簡化數學分析,首先定義單擺 角度φ=θ±π 為倒單擺與下垂直立位置之角度。針對斜面直 線倒單擺之甩上任務,我們修改文獻[3]之 Lyapunov 能量 控制法為
Kt
g E M
E k
u = ( − 0)sgn(φ&cos(φ−α))+ sinα (3)
表三 倒單擺維持平衡模糊控制規則表
∆ e
NB NM NS ZE PS PM PB NB PB PB PM PM PS PS ZE NM PB PM PM PS PS ZE NS NS PM PM PS PS ZE NS NS ZE PM PS PS ZE NS NS NM PS PS PS ZE NS NS NM NM PM PS ZE NS NS NM NM NB
e
PB ZE NS NS NM NM NB NB
(a) 角度誤差歸屬函數圖
(b) 角度誤差變化量歸屬函數圖
(c) 輸出解模糊歸屬函數圖
圖3 倒單擺甩上時滑台定位模糊控制器之輸入及輸出 變數歸屬函數圖
其中
) cos 1 2 (
1 φ2+ − φ
= I mgr
E & (4)
為倒單擺之總能量。E I 2mgr 2
1 2
0= φ& + 為倒單擺在垂直位 置(φ=±π )之能量以及 k 為增益參數。由於滑台的重量遠 大於倒單擺的重量並忽略阻尼項,則其動態方程式可以近 似為M x&&+Mgsinα=Ktu;因此倒單擺總能量E之微分為
φ φ φ&& &
& (I mgrsin )
E= + =−mrx&&cos(φ−α)φ&
φ α α cos(φ )&
sin −
− −
= M
Mg u
mrKt (5)
定義Lyapunov 能量函數為
(a) 倒單擺甩上時未考慮滑台定位控制
(b) 倒單擺甩上時加入滑台定位 PID 控制器
(c) 倒單擺甩上時加入滑台定位模糊控制器 圖4 斜面直線倒單擺甩上模擬結果,左圖為φ −& φ相位
圖,右圖為滑台位置軌跡
2 0) 2(
1 E E
V = − (6)
對(6)式微分並代入(3)式可得
E E E
V& =( − 0)&
0 ) cos(
)
( − 0 2 − ≤
−
= E E φ α φ&
M k
mrKt (7)
(a) 角度誤差模糊歸屬函數圖
(b) 角度誤差變化量模糊歸屬函數圖
(c) 輸出解模糊歸屬函數圖
圖5 倒單擺維持平衡模糊控制器輸入輸出變數歸屬函數
因此甩上控制法則(3)為穩定可工作的甩上控制器。然 而(3)式的缺點為當倒單擺達到甩上的目標時我們無法預 知滑台的位置而且收斂較慢。為改善這些缺點我們以控制 法則(3)為基礎並加上滑台的 PID 或模糊定位控制使得在進 行甩上控制任務的同時可以兼顧到滑台的定位控制,並如 圖2 所示。以滑台 PID 定位控制為例,我們將甩上控制器 設計為
) ( ) (
)
( K s et
s K K t
u = p+ i + d (8)
以及
)) cos(
sgn(
) ( ) ( )
(t = R−x +k E−E0 φ& φ−α
e (9)
其中R為滑台的參考位置命令以及原來控制法則(3)之重 力補償項
Kt
sin
Mg α則改由PID 或模糊定位控制器來克服。
因為內回路定位控制只改變滑台的動態特性而未改變倒單 擺的動態特性,亦即動態方程式(2)不變,故所以甩上控制 器(8)與甩上控制法則(3)皆為穩定及可工作的甩上控制器。
倒單擺甩上時滑台的定位可使用PID 或模糊控制器。
模糊控制器的輸入與輸出歸屬函數之型式如圖3 所示,模 糊控制規則表則如表二所示。設計模糊控制器是藉由觀察 PID 控制器甩上的響應結果及輸入輸出變數的響應再以人
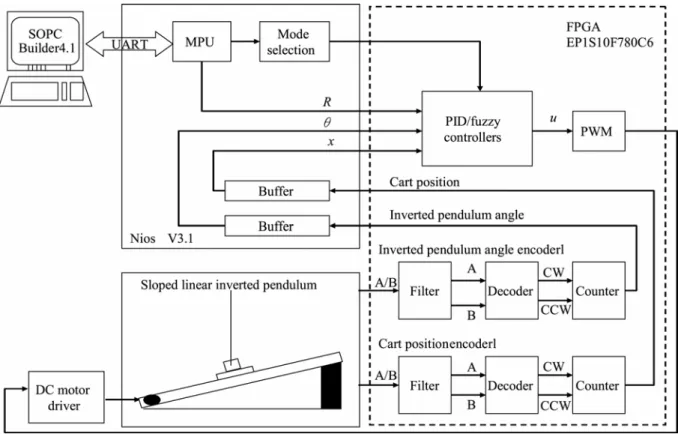
圖6 斜面直線倒單擺控制系統方塊圖
圖7 光學編碼器訊號數位濾波器電路圖
工調法來調整模糊控制器之各個參數。倒單擺甩上時滑台 之模糊定位控制器的閉回路控制取樣時間設定為∆T = 10 msec。
斜面直線倒單擺由下垂位置(φ=0)甩上至直立位置 (φ=θ±π)之模擬結果如圖 4 所示,其中斜面 α=15°。斜 面直線倒單擺甩上時使用控制法則(3)未加入加入滑台定 位控制之模擬結果如圖 4(a)所示。當增益k分別設為 k=0.1、k=0.2 及k=0.3 時,倒單擺甩上至直立位置所需 的時間分別為35 秒、17.32 秒及 11.15 秒。很明顯的增益k 越大時甩上所需的時間越短,而且倒單擺甩上至直立位置 時滑台的位置不同。斜面直線倒單擺甩上時加入滑台定位 PID 控制器之模擬結果如圖 4(b)所示,其中滑台參考位置
' A A B ' A A B ' B B A ' B B A
CW= ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅ ' A A B ' A A B ' B B A ' B B A
CCW= ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅ 圖8 光學編碼器訊號四倍頻解碼器電路圖
命令為 R=20cm 以及 PID 控制器參數為 Kp=5、Ki=1、
Kd=1.8。當增益k 分別設為 k=0.1、k=0.2 以及 k=0.3 時,
倒單擺甩上至直立位置所需的時間分別為24.61 秒、10.72 秒以及7.78 秒。斜面直線倒單擺甩上時加入滑台定位模 糊控制器之模擬結果如圖4(c)所示,其中滑台參考位置命 令為R=20cm。當增益 k 分別設為 k=0.1、k=0.2 以及 k=0.3 時,倒單擺甩上至直立位置所需的時間分別為16.32 秒、
4.12 秒以及 2.98 秒。模擬結果顯示倒單擺甩上時加入滑 台定位控制不但可以兼顧到滑台的定位控制而且所需的 時間也比較短,其中又以加入滑台定位模糊控制器的結 果最佳。
圖9 數位 PID 控制器硬體電路設計方塊圖
圖10 模糊控制器硬體電路設計方塊圖
(10)
四、平衡控制器
欲同時兼顧擺桿平衡及滑台定位功能,我們使用線性 狀 態 回 授 控 制 器 以 達 到 控 制 目 的 。 定 義 狀 態 變 數 x(t)=[x(t),θ(t),x&(t),θ&(t)]T以及輸出變數y(t)=[x(t),θ(t)]T,將 斜面直線倒單擺系統(α=15°)於垂直平衡位置線性化並代 入表一之系統參數值,可得線性狀態動力方程式
狀態回授控制器u = - Kx(t)之增益 K 可藉由設定閉迴 路 系 統 之 固 有 值 並 使 用 Matlab 提 供 之 阿 克 曼 公 式 (Ackermann’s formula)來設計。例如設定閉迴路固有值為 λ1=−1、λ2=−1、λ3=−4 以及 λ4=−4,經 Matlab 計算後可得 狀態回授增益為K=[−0.4623 12.9789 − 0.6625 3.4596]
圖11 直線倒單擺甩上及平衡定位之模擬結果,α =0°
圖12 斜面直線倒單擺甩上及平衡定位模擬結果,
°
=15 α
由於滑台的重量遠大於倒單擺的重量故滑台可以近似 為一個線性的系統,然而倒單擺之非線性動態特性十分顯 著無法以線性系統來近似,因此我們改用模糊控制器來控 制倒單擺角度誤差而保留線性PD 控制器控制滑台位置誤 差。倒單擺模糊控制器的輸入與輸出歸屬函數之型式如圖 5 所示模糊控制器規則表則如表三所示。設計此模糊-PD 控制器的方法是藉由參考線性狀態回授控制平衡定位的響 應結果再以人工調法來調整模糊-PD 控制器的各個參數。
倒單擺維持平衡之模糊控制器的閉回路控制取樣時間設定 為∆T =10 msec。
五、控制器實現
斜面直線倒單擺之控制系統方塊圖如圖6 所示,整個 系統可分為三部份,第一部份為斜面直線倒單擺機構與直 流馬達及其電流驅動器,第二部份為以 FPGA (ALTERA Stratix EP1S10F780C6)實現的 PID 及模糊控制器與週邊硬 體電路以及第三部份為Nios 嵌入式系統。滑台位置由附加
表四 斜面直線倒單擺甩上及平衡定位控制器模擬參數
細線軌跡控制器參數 粗線軌跡控制器參數
斜面
角度 甩上及滑台定位 ID控制器
平衡及定位 狀態回授控制器
甩上及滑台定位 模糊控制器
平衡及定位 模糊-PD控制器
°
=0 α
3 .
=0
k R=20
=4 Kp
5 .
=0 Ki
2 .
=1 Kd
=20 R
T
−
−
=
8761 . 2
5313 . 0
256 . 10
3231 . 0 K
3 .
=0
k R=20 圖3及表二
=20 R 圖5及表三
°
=15 α
3 .
=0
k R=20
=5 Kp
=1 Ki
8 .
=1 Kd
=20 R
T
−
=
3.4596 0.6625 - 12.9789
0.4623 K
3 .
=0
k R=20 圖3及表二
=20 R 圖5及表三
表五 斜面直線倒單擺甩上及平衡定位控制器實驗參數
細線軌跡控制器參數 粗線軌跡控制器參數
斜面
角度 甩上及滑台定位 數位PID控制器
平衡及定位 狀態回授控制器
甩上及滑台定位 模糊控制器
平衡及定位 模糊-PD控制器
°
=0 α
3 .
=0
k R=20
=4 KP
=1 KI
=120 KD
=20 R
T
−
−
= 287
53 12
1 K
3 .
=0
k R=20 圖3及表二
=20 R
圖5及 表三
°
=15 α
3 .
=0
k R=20
=5 KP
=1 KI
=180 KD
=20 R
T
−
= 345
1 - 13
1 K
3 .
=0
k R=20 圖3及表二
=20 R
圖5及 表三
於馬達旋轉軸之光學編碼器(cart position encoder) A/B 相 訊號來感測,其解析度為127.5 pulses/mm。倒單擺角度由 外加之光學編碼器(inverted pendulum angle encoder)A/B 相 訊號來感測,其解析度為4000 pulses/cycle。Nios 嵌入式系 統實現控制甩上法則、建立與 PC 電腦之串列通訊以及系 統監控。以下介紹FPGA 所實現的週邊電路以及 PID 與模 糊控制器的硬體電路。
1. 光學編碼器訊號數位濾波器模組
光學編碼器訊號數位濾波器採用常見的4 位元延遲濾 波器(four-bit delay filter)。光學編碼器訊號數位濾波器硬體 電路圖如圖7 所示。電路原理為將史密斯觸發電路擷取後 的A 或 B 相脈波訊號送進由 4 個 D 型正反器所組成的移 位暫存器。當脈波的準位為連續3 個時脈時間均為低電位 時始輸出低電位,如此即可抑制頻率高於時脈頻率三分之 一倍的高頻雜訊。
2. 光學編碼器訊號解碼器模組
光學編碼器訊號解碼器採用常見的四倍頻解碼電路,
並如圖8 所示。當光學編碼器 A 相訊號超前 B 相訊號時,
CW 輸出端產生正相脈波。反之,A 相落後 B 相時,CCW 輸出端產生負相脈波。
3. PWM 模組
PWM 模組的輸入為 PWM 責任周期命令,資料格式為 13 位元,其可表示的資料範圍為+4095~-4096。PWM 模 組的輸出訊號為控制馬達正反轉的DIR 及控制馬達轉速大 小的PWM 訊號。
4. 數位 PID 控制器模組
所實現的 PID 控制器為下列型式之數位 PID 控制器
圖13 直線倒單擺甩上及平衡定位實驗結果,α =0°
) ( )
( )
( )
(t KPet KI et T KD et
u = + ∑ ∆ + ∆ (11)
數位PID 控制器硬體電路設計方塊圖如圖 9 所示,其輸入 為誤差訊號以及輸出為馬達控制訊號兩者皆為13 位元,而 控制增益參數KP、KI 及 KD 為 13 位元整數。數位 PID 控 制器的閉回路控制取樣時間為 ΔT=10 msec。
5. 模糊控制器模組
模糊控制器之硬體電路設計方塊圖如圖10 所示。模糊 控制器的輸入分別為誤差量及誤差量變化量,其歸屬函數 如圖3 示;解模糊化的輸出歸屬函數亦如圖 3 示。模糊控 制器的輸出為
∑
∑
=
= =n
i i
n i iDi
u
1 1
ω
ω 以及ωi=min
{
µE,µ∆E}
,其中µE為誤差歸屬函數、µ∆E為誤差量變化量歸屬函數以 及Di為解模糊歸屬函數。模糊控制器之輸入、輸出以及歸 屬函數參數皆為13 位元。模糊控制器的閉回路控制取樣時 間為∆T =10 msec。
六、模擬與實驗結果
斜面直線倒單擺甩上及平衡定位之模擬結果分別如圖 11 (α =0°)及圖 12 (α =15°)所示,控制器參數如表四所 示 , 其 中 甩 上 及 平 衡 定 位 時 滑 台 參 考 位 置 命 令 皆 為
cm
=20
R 。整體系統的控制流程為首先進行倒單擺甩上 控制任務,然後判斷倒單擺角度是否落於−12°~12°之 內,若是則隨即進行平衡及定位控制任務。模擬結果顯示 所設計的控制器均能成功的達到目標,斜面直線倒單擺甩 上所需時間比平面直線倒單擺所需時間較長,但是平衡定 位之誤差比較小。當使用模糊控制器時倒單擺甩上所需的 時間比較短,而且平衡及定位時之誤差也比較小。
圖14 斜面倒單擺甩上及平衡定位實驗結果,α =15°
斜面直線倒單擺甩上及平衡定位之實驗結果分別如圖 13 (α =0°)及圖 14 (α =15°)所示。實驗之控制器參數與 電腦模擬所使用之控制器參數基本上是相同,並如表五所 示。整體系統的控制流程亦為首先進行倒單擺甩上控制任 務,然後判斷倒單擺角度是否落於−12°~12°之內,若是 則隨即進行平衡定位控制任務。實驗結果顯示所設計的 FPGA 硬體控制器均能成功的達到目標。當使用線性控制 器時倒單擺於斜面α =15°甩上所需的時間為9.2 秒,而平 衡定位時之震盪誤差為13.33 cm。當使用模糊控制器時倒 單擺於斜面α =15°甩上所需的時間縮短為7.3 秒,而且平 衡定位時之震盪誤差降為7 cm 左右;模糊控制器也比較容 易完成甩上及接續隨後之平衡定位控制。比較實驗與模擬 結果可以發現在倒單擺角度軌跡變化上兩者十分吻合。雖 然在滑台位置軌跡在實驗與模擬結果上差異較多,但兩者 的相對穩定性特性是一致的,其主要原因為滑台的非線性 特性諸如傳輸皮帶、齒隙等等尚未被考慮在內。經實驗發 現斜面直線倒單擺仍可正常工作的最大斜面角度為 35 度 (α ≤35°),其主要原因為斜面角度越大使得滑台移動時 所需克服的重力就越大,而使得控制特性不佳。
雖然模擬結果(圖11 及圖 12)及實驗結果(圖 13 及 圖14)中滑台位置皆約有 5~7 公分之定位誤差,但整個系 統仍具有穩定性。造成定位誤差之主要原因為數學模型 (1)、(2)為在理想狀態下之簡化公式,許多其他的動態特性 未被考慮在內。例如我們設計的馬達驅動器內部未具有成 本較高電流回授控制器以致馬達的動態特性較遲緩以及機 構的皮帶傳動及磨擦等非線性特性皆被忽略不計。
七、結 論
本文針對斜面直線倒單擺系統進行甩上與維持平衡及
定位控制器設計及實驗。控制器使用Nios 嵌入式系統為控 制核心並以可規劃程式閘陣列來實現所設計的比例積分及 微分控制器與模糊控制器以及週邊硬體電路。實驗結果證 明所設計的模糊控制器不但可以縮短甩上所需的時間,還 可以在進行甩上任務時同時兼顧到滑台的定位控制,並且 可以降低最後的滑台位置誤差。
符號索引
B 滑台黏滯係數
B (N−sec/m) 滑台黏滯係數
E 倒單擺總能量
mgr I
E 2
2 1 2
0 = φ& + 倒單擺之總能量倒單擺在垂直位置 (φ=±π)之能量以及
k
為增益參數I 擺桿轉動慣量
I (kg−m2) 擺桿轉動慣量
k 能量回授增益參數
K 狀態回授增益
Kp,Ki,Kd PID 控制器參數
KP,KI,KD 數位PID 控制器增益參數
Kt 馬達作用力常數
m 擺桿質量
M (kg) 滑台質量
R 滑台的參考位置命令
r(m) 擺桿質心到端點的長度
u(t) 馬達電流驅動器輸入電壓
V Lyapunov 能量函數
x(t) 輸出變數為滑台位置
x(t) [x(t),θ(t),x&(t),θ&(t)]T狀態變數 y(t) [x(t),θ(t)]T狀態空間輸出變數
α 斜面的角度
γ 擺桿質心到端點的長度
Θ(t) 倒單擺與垂直軸方向之角度
ψ 倒單擺與下垂直立位置之角度
誌 謝
本研究承蒙國科會計畫編號 NSC 92-2213-E-011-020 之經費補助,特此致謝。
參考文獻
1. Furuta, K., Yamakita, M., and Kobayashi, S., “Swing Up Control of Inverted Pendulum,” International Conference on Industrial Electronics, Control and Instrumentation, Kobe, Japan, Vol. 3, pp. 2193-2198 (1991).
2. Spong, M. W., “The Swing Up Control Problem for the Acrobot,” IEEE Control Systems Magazine, Vol. 15, No.
1, pp. 49-55 (1995).
3. Astromom, K. J., and Furuta, K., “Swinging up a Pendu- lum by Energy Control,” Automatica, Vol. 36, No. 2, pp.
287-295 (2000).
4. Furuta, K., and Iwase, M., “Swing-up Time Analysis of Pendulum,” Bulletin of the Polish Academy of Sciences, Technical Sciences, Vol. 52, No. 3, pp. 153-163 (2004).
5. Lin, Z., Saberi, A., Gutmann, M., and Shamash, Y. A.,
“Linear Controller for an Inverted Pendulum Having Re- stricted Travel: A High-and-low Gain Approach,”
Automatica, Vol. 32, No. 6, pp. 993-937 (1996).
6. Demirci, M., “Design of Feedback Controllers for Linear System with Applications to Control of a Dou- ble-inverted,” International Journal of Computational Cognition, Vol. 2, No. 4, pp. 65-84 (2004).
7. Grasser, F., D’Arrigo, A., Colombi, S., and Rufer, A.,
“JOE: A Mobile Inverted Pendulum,” IEEE Transactioas on Industrial Electronics, Vol. 40, No. 1, pp. 107-114 (2002).
8. Ohsumi, A., and Izumikawa, T., “Nonlinear Control of Swing-up and Stabilization of an Inverted Pendulum,”
Proceedings of the 34th Conference on Decision & Con- trol, New Orleans, LA, December, pp. 3873-3880, (1995).
9. Chung, C. C., and Hauser, J., “Nonlinear Control of a Swing Pendulum,” Automatica, Vol. 31, No. 6, pp.
851-862 (1995).
10. Bugeja, M., “Non-Linear Swing-Up and Stabilizing Con- trol of an Inverted Pendulum System,” EUROCON 2003 Ljubljana, Slovenia, Vol. 2, pp. 437-441, , (2003).
11. Dussy, S., and Ghaoui, L. E., “Robust Gain-Scheduled Control of a Class of Nonlinear Parameter-Dependent Systems: Application to an Uncertain Inverted Pendu- lum,” IEEE International Conference on Control Applications, pp. 516-521 (1996).
12. Lo, J. C., and Kuo, Y. H., “Decoupled Fuzzy Slid- ing-mode Control,” IEEE Transactions on Fuzzy Systems, Vol. 6, No. 3, pp. 426-435 (1998).
13. Yurkovich, S., and Widjaja, M., “Fuzzy Control Synthesis
for an Inverted Pendulum,” Control Engineering Practice, Vol. 4, No. 4, pp. 445-469 (1996).
2005 年 06 月 15 日 收稿 2005 年 07 月 10 日 初審 2005 年 09 月 29 日 複審 2005 年 10 月 12 日 接受
![圖 9 數位 PID 控制器硬體電路設計方塊圖 圖 10 模糊控制器硬體電路設計方塊圖 (10) 四、平衡控制器 欲同時兼顧擺桿平衡及滑台定位功能,我們使用線性 狀 態 回 授 控 制 器 以 達 到 控 制 目 的 。 定 義 狀 態 變 數 x(t)= [ x ( t ), θ ( t ), x& ( t ) , θ & ( t )] T 以及輸出變數 y(t)=[x(t),θ(t)] T ,將 斜面直線倒單擺系統(α=15°)於垂直平衡位置線性化並代 入表一之系統參數值,](https://thumb-ap.123doks.com/thumbv2/9libinfo/9126671.410951/6.892.466.795.131.372/數位控制器硬體電路設計方塊圖模糊控制四平衡θθ系統參.webp)

