1
發展無人飛行載具航拍技術作業
Development of UAS aerial mapping technology
主管單位:內政部國土測繪中心 執行單位:經緯衛星資訊股份有限公司
摘要
103 年度「發展無人飛行載具航拍技術作業」案為「測繪科技發展後續計畫」
工作項目之一,係 4 年期(100~103 年)之延續型計畫之第 4 年執行。主要工作項 目為辦理 18 區 UAS 航拍及影像處理作業,製作快速幾何糾正鑲嵌影像、正射影像 供各項應用參考及局部區域圖資更新;更新升級數值航測影像工作站圖資編修軟 體、製作成果展示網頁與辦理教育訓練等工作。
本案總計完成 18 個航拍區域,面積超過 10000 公頃以上之 UAS 航拍及影像處 理作業,產製成果並應用於緊急災害應變與局部區域圖資更新及提供其他政府機關 以辦理特定區域國土監測等。另一方面,本案以國土測繪中心 UAS 標準作業流程為 基礎,針對現有系統設計必須強化之處,運用專為 UAS 設計之 POS,輔助空中三 角測量計算,加速產製正射影像作業。同時運用 UAS 之直接地理定位技術,在有效 縮短影像幾何鑲嵌校正作業時間的同時,提高幾何校正成果精度。此技術於本年度 已成功運用於高雄氣爆緊急災害應變拍攝任務,於 24 小時內完成災區拍攝與製作正 射影像,快速提供緊急災害應變決策支援使用。
關鍵詞:無人飛行載具系統、整合式導航定位定向系統、e-GPS 定位技術、相 機率定、直接地理定位技術
Abstract
This project "Development of UAS aerial mapping technology "is based on a four-year founding from National Science Council. Works of the project are building UAS (Unmanned Aircraft System) and standard operation procedures of aerial
photogrammetric using UAS. The main purpose of this project is using of UAS as a platform to collect spatial information, evaluating of aerial image processing software and hardware.
In 2014, we develop GNSS / IMU integrated navigation positioning and orientation system for UAS based on NLSC existing UAS operation procedures, which can speed up the aerial triangulation calculations, and accelerate orthophoto production. Using e-GPS technology of NLSC assisted bundle adjustment with self-calibration of the UAS aerial images. We also analyze the effects of camera calibration methods on the accuracy of aerial triangulation. And further develop UAS direct geo-referencing technology to shorten operating time of image geometric correction, while improving the accuracy of geometric correction.
Keywords : Unmanned Aircraft System, Position and Orientation System, e-GPS,
Camera calibration, Direct Georeference.一、前言
「發展無人飛行載具航拍技術作業」案(以下簡稱本案)為「測繪科技發展後續計 畫」工作項目之一,係4年期(100~103年)之延續型計畫,主要工作項目為建置無人 飛行載具系統(Unmanned Aerial Vehicle System,以下簡稱UAS)、購置航拍影像處理 軟硬體設備、辦理UAS航拍作業、研擬UAS航拍及影像處理標準作業流程、製作快速幾何 糾正鑲嵌影像、正射影像供各項應用參考及局部測繪局部區域圖資更新,輔助國家經濟 發展。本案主要目的為運用UAS作為蒐集空間資訊的平台,利用無人飛行載具自動化、
精確、快速、安全與大範圍的特性,配合經過整體規劃的航拍流程,建立一套可以快速 取得特定地點地理資訊之創新作業程序,藉此引進新測繪技術,應用於國土利用規劃、
民生建設及防救災等領域,兼顧環保與輔助經濟發展,達到國土永續經營目標並供各界 運用。
103年度工作項目,以UAS與作業流程及規範為基礎,針對現有系統設計必須強化 之處,提出適用於旋翼型UAS之POS,用以輔助空中三角計算,以加速產製正射影像作 業。另針對相機率定方式對空中三角測量精度之影響進行探討與分析。同時進一步發展 適用於UAS之直接地理定位技術,在有效縮短影像幾何鑲嵌校正作業時間的同時,提高 幾何校正成果精度。此技術於本年度已成功運用於高雄氣爆緊急災害應變拍攝任務,於 24小時內完成災區拍攝與製作正射影像,快速提供緊急災害應變決策支援使用。
二、工作項目與流程
本案主要工作項目計有:
1. UAS 航拍作業 2. UAS 影像處理作業
3. 旋翼型 UAS 直接地理定位設備研發及測試
2.1 UAS 航拍作業
本案合計辦理 18 區(如表 1)航拍任務,主要以定翼型 UAS 辦理航拍作業,航拍 影像前後重疊率要求為 80%,側向重疊率 40%。UAS 搭載 Canon 5D MKII 數位相機並 依不同區域或地形需求搭配 20mm 或 24mm 或 50mm 焦距之定焦鏡頭辦理航拍作業,影像 解析度(地元尺寸)在 25 公分以內。另面積小於 1 平方公里之航拍區域採用旋翼型 UAS 辦理航拍作業。
表 1 、UAS 航拍任務區域彙整表
編號 航拍區域 用途 需求機關
(單位)
面積
(km2) 製作成果 備註
1. 南投縣南投市 研究測試 本中心 5.6 正射影像
2. 屏東縣霧台鄉 圖資更新 本中心 0.69 正射影像
3. 南投縣國姓鄉 圖資更新 本中心 0.3 正射影像
4. 臺南市學甲區 圖資更新 本中心 16 正射影像
5. 桃園市桃園區 圖資更新 本中心 0.6 正射影像
6. 臺南市南區 圖資更新 本中心 2.2 正射影像
7. 嘉義縣大林鎮 圖資更新 本中心 6 正射影像
8. 彰化縣福興 圖資更新 本中心 7 正射影像
9. 雲林縣麥寮鄉 圖資更新 本中心 14 正射影像
10. 苗栗縣銅鑼鄉 圖資更新 本中心 3.5 正射影像
11. 南投縣仁愛鄉 監測 本中心 12 正射影像
12. 臺南市麻豆區 監測 臺南市政府地政局 3.84 正射影像 協助航拍 13. 臺南市永康區 監測 臺南市政府地政局 0.71 正射影像 協助航拍 14. 花蓮縣秀林鄉 監測 太魯閣國家公園管理處 12.54 正射影像 協助航拍 15. 嘉義縣東石鄉 監測 內政部營建署
城鄉發展分署 56 正射影像 協助航拍 16. 南投縣南投市
(國 3 南投交流道) 圖資更新 本中心 3.2 正射影像 17. 花蓮縣萬榮鄉 災害應變 國家災害防救
科技中心 0.1 拼接影像 18. 高雄市前鎮區 災害應變 國家災害防救
科技中心 1.0 拼接影像
合計 145.28
2.2 UAS 影像處理作業
在18區航拍任務中,分別製作快速拼接及正射影像成果。影像處理除快速拼接成果 外,依傳統航測方式辦理,進行空中三角測量計算及製作正射影像。UAS航拍影像利用 空中三角測量進行空間解算,主要使用少量的地面控制點及影像間的匹配點位資訊,解 算求得點位之空間位置。最後將中心投影之航空像片,糾正成正射投影,並進一步鑲嵌 製作成1張無接縫的正射影像。
2.3 旋翼型 UAS 直接地理定位設備研發及測試
本案基於研究與開發相對低價位航拍系統,研究旋翼型 UAS 搭載整合 GPS 與 IMU 的 POS。感應器的機電整合是利用整合高精度 GPS 與 IMU,以利航拍解算之用。本 研究完成之機電整合項目於本年度已酬載於旋翼型 UAS 並辦理部分區域航拍作業,使 用的直接地理定位模組於旋翼型 UAS 酬載時之分布情形如圖 1。
ADIS16405
EVK-6T
EOS 5D Mark II
圖 1 旋翼型 UAS 直接地理定位系統模組分布情況
機電整合之全球定位系統係採用單頻 GPS 模組 ublox EVK-6T,其規格如圖 2;另 選用之 IMU 為 ADIS16405,相關資訊如圖 3。
Item EVK-6T
Function L1 carrier phase measurement and pseudo range
Communication
port USB, RS232 port
Sample rate 10 Hertz
Voltage 5 V
Dimension 74 x 54 x 24
圖 2 EVK-6T 規格
圖 3 ADIS16405 規格表
測試作業流程主要為針對數位相機先進行室內率定以得到相機之內方位參數,完 成室內率定後再將相機酬載於旋翼型 UAS 辦理航拍,以進行室外率定場之固定臂及軸 角率定作業。最後透過內方位參數及固定臂及軸角率定結果評估直接地理定位能力。
三、作業及研究成果
3.1 作業成果
本案 18 區航拍作業分別製作快速拼接影像(2 區)及正射影像(16 區)成果。其中 2 區為配合國家災害防救科技中心緊急災害應變航拍任務,辦理花蓮縣萬榮鄉土石流災 點及高雄市前鎮區氣爆災點航拍且製作快速拼接影像。另有 4 區為協助內政部營建署 城鄉發展分署與太魯閣國家公園管理處及臺南市政府地政局辦理特定區域航拍與製作 正射影像提供機關作為市地重劃、特定區域之國土監測參考使用。其餘 12 區則配合更 新通用版電子地圖正射影像。
3.1.1 緊急災害應用之快速拼接影像
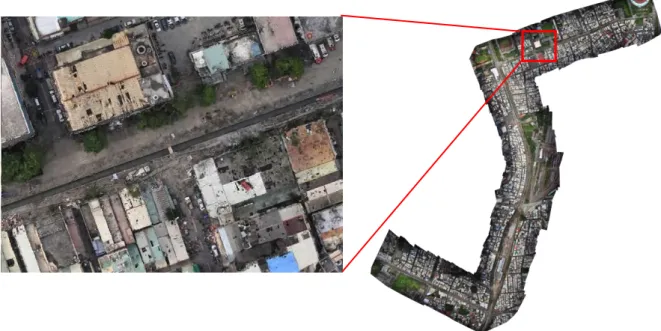
本案於 103 年 7 月 25 日及 8 月 1 日配合國家災害防救科技中心提出之緊急災害應 變航拍作業需求,辦理花蓮縣萬榮鄉土石流(如圖 4)、高雄市前鎮區氣爆(如圖 5)
災點航拍作業,並於航拍後立即製作快速拼接影像成果(如圖 6),提供中央災害應變 中心防救災緊急應變參考使用。
圖 4 花蓮縣萬榮鄉土石流現場影像(左)及空中側拍影像(右)
圖 5 高雄市前鎮區氣爆空中側拍影像
圖 6 高雄市前鎮區氣爆災點快速拼接影像
3.1.2 正射影像
本案在 18 區航拍區中有 4 區為協助內政部營建署城鄉發展分署與太魯閣國家公園 管理處及臺南市政府地政局辦理臺南市永康區及麻豆區(如圖 7)、嘉義縣東石鄉、花蓮 縣秀林鄉等 4 區域航拍,並製作正射影像提供機關作為市地重劃、特定區域之國土監 測參考使用。
圖 7 臺南市麻豆區正射影像
另本案屏東縣霧台鄉等 12 區 UAS 正射影像成果則更新通用版電子地圖局部區域正 射影像,更新前後期影像示意圖如圖 8。
圖 8 屏東縣霧臺鄉 UAS 正射影像前期(左)、後期(右)
3.2 研究成果
數位相機內方位率定成果如表 2。完成內方位率定將數位相機裝設於旋翼型 UAS 後,便可於室外控制場進行固定臂及軸角率定。本案測試之室外控制場位於臺南市北 區臺南公園內,每隔 100 公尺左右設置點位當作率定控制點與檢核點(如圖 9)。此控制 場之選擇考量到足夠的透空度,減少 GPS 訊號受到遮蔽或多路徑效應的影響,同時行 人車輛稀少,控制點較不易被破壞,控制點之三維坐標量則是以控制測量網形平差計 算得到。
表 2 相機內方位參數率定成果
圖 9 臺南公園地面控制場
於室外控制場進行航拍以率定固定臂及軸角參數時,飛行高度設定為 200 公尺。
另考量旋翼型 UAS 載重的限制,以及受側風影響等因素,前後重疊率與側向重疊率提 高設定為 80%與 60%,以確保相片能夠有足夠的重疊率。完成航拍並透過空三解算得 外方位率定成果如圖 10。初步成果可知,當飛行高度為 200 公尺時,其影像參考精度 為 0.48 個像元大小;影像三維定位精度約為 0.02 公尺。藉由影像初始外方位及空三解 算外方位兩者間的資料比較,並將時間延遲量因素考慮進去得到固定臂及軸角率定成 果如表 3。
圖 10 空三計算求得外方位參數率定成果
表 3 固定臂與軸角率定成果
利用數位相機內方位參數及固定臂與軸角率定果,進一步評估系統直接地理定位 能力,以作為 UAS 之重要評估指標。使用直接地理定位模組如圖 11,匯入地面控制 點坐標、相機內方位及影像外方位資料,另程式具反投影及消除透鏡畸變誤差功能,
使欲量測之地控點坐標顯示在影像上,以減少量測之錯誤。藉由搜尋所有拍到此地控 點之影像,一併顯示在視窗底處,以人工挑選適當間距與交會角之多張影像進行前方 交會,以評估系統直接地理之定位精度。最後計算之坐標成果則顯現在模組視窗上,
將地面測量之三維物空間資料作為參考坐標,並以足量檢核點進行比對,其成果即可 作為本系統直接地理定位能力之指標。直接地理定位測試結果如表 4。
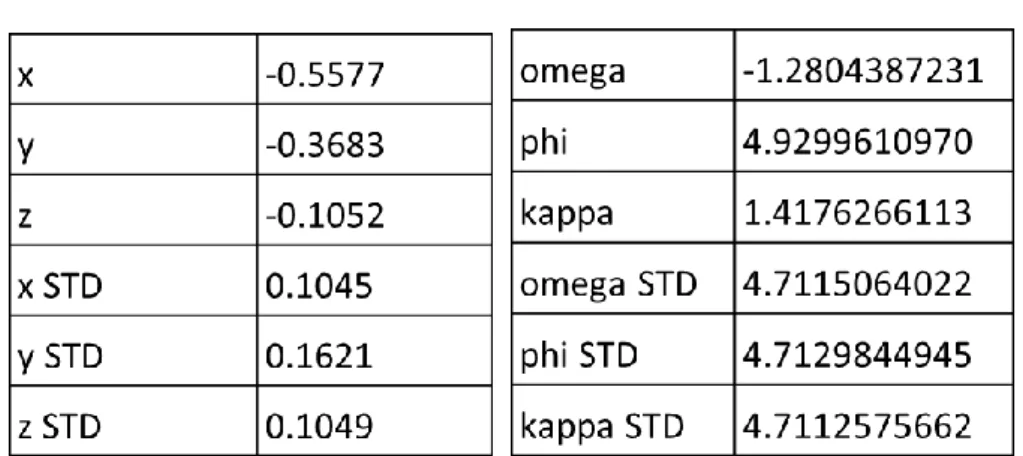
圖 11 直接地理定位程式介面 表 4 直接地理定位測試結果
由表中可知,當飛行高度為 200 公尺時,直接地理定位精度 RMS 值約為 10.217、
9.668、13.786 公尺。可能造成的因素為多旋翼各螺旋槳之間有共振的情況發生,導致 部分的照片拍攝品質不佳,影響空三的成果,進一步影響直接地理定位量測的誤差。
未來若針對防震做加強且執行地面的率定作業,使用一階段率定的方式並提升軌跡精 度,可望再提升直接地理定位的精度。另 POS 的估計誤差如表 5。此誤差預期還可藉 由搭載較佳的 INS、靜態率定、較低的飛行高度等進行改善。
表 5 POS 估計誤差
四、結論與建議
本案在 UAS 航拍作業執行上,總計完成 18 區的航拍任務,分別取得各區域之影 像、姿態紀錄資料或空拍影片等。18 區中包括配合國家災害防救科技中心需求之緊急 災害應變作業 2 區(花蓮萬榮土石流、高雄前鎮氣爆)、協助其他機關航拍作業 4 區、
更新通用版電子地圖航拍作業 12 區。其中高雄氣爆部分,因區域面積較小,運用旋翼 型 UAS 進行航拍,顯現旋翼型 UAS 辦理小區域航拍特性與優勢。另該次任務於 24 小時內即完成災區拍攝與製作正射影像,並提供中央災害應變中心參考。另一方面,
協助其他機關單位航拍並提供正射影像成果作為參考,亦有效增進政府機關間橫向聯 繫。而部份成果用於更新通用版電子地圖正射影像,進一步提升測繪圖資更新效率。
本案已完成旋翼型 UAS 之 POS 研發及直接地理定位測試作業,POS 三維定位精 度約為 10~15 公尺。該 POS 並於 2 次緊急航拍任務中使用,在無地面控制點情況下,
於 24 小時內快速產製具空間資訊之拼接影像。另直接地理定位結果仍存在共振與系統 誤差問題,後續將持續研究修正,期望可進一步提升精度,增進防救災緊急應變作業 效益。
參考文獻
1. Ellum, C. M. and El-Sheimy, N., 2003, The Calibration of Image-Based Mobile Maping Systems, Proceedins of 6th Conference on Optical 3D Measurement Techniques, Switzerland, on CD-ROM, Sep. 22-25.
2. E. Gülch, 2012, PHOTOGRAMMETRIC MEASUREMENTS IN FIXED WING UAV IMAGERY, International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XXXIX-B1, 2012 XXII ISPRS Congress, 25 Aug. - 01 Sep. 2012, Melbourne, Australia
3. Fraser, C.S., and Edmundson, K.L., 2000, Design and implementation of a computational processing system for off-line digital close-range photogrammetry, ISPRS Journal of Photogrammetry and Remote Sensing, Vol.55, pp.94-104.
4. Johannes B. Stoll, 2013, UNMANNED AIRCRAFT SYSTEMS FOR RAPID NEAR SURFACE GEOPHYSICAL MEASUREMENTS, International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XL-1/W2, 2013 UAV-g2013, 4 – 6 September 2013, Rostock, Germany
5. Mostafa, M., 2002, Camera/INS Boresigh Calibration: New Advances and Performance Analysis, in ASPRS Annual Meeting, Washington, D.C., USA.
6. Morin, K. W., 2002, Calibration of Airborne Laser Scanners, Master Degree Thesis, University of Calgary.
7. Pinto, L. and Forlani, G., 2002, A single step calibration procedure for INS/GPS in aerial photogrammetry, Photogrammetric Computer Vision, ISPRS Commission III, Graz, Austria.
8. Schenk, T., 2001, Modeling and Analyzing Systematic Errors in Airborne Laser Scanners”, Technical Notes in Photogrammetry, No.19.
9. Skaloud, J., 1999, Optimizing Georeferencing of Airborne Survey Systems by INS/DGPS, Ph.D Thesis, Geomatics Engineering, University of Calgary, Canada.
10. T. Hormigo, J. Araújo , 2013, A MICRO-UAV SYSTEM FOR FOREST MANAGEMENT, International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XL-1/W2, 2013 UAV-g2013, 4 - 6 September 2013, Rostock, Germany