坡地土砂災害觀測資訊加值分析與應用 Added-value analysis and application of monitoring data on slopeland disaster
171
0
0
全文
(2)
(3) 摘要. 摘要 本研究計畫建立以地聲探測器與攝影機搭配的土石流監測預警 系統。攝影畫面以創新的總灰階值變化率的方式,可以準確偵測土石 流的到來,甚至在人類眼睛無法判別的暗度下,仍然可以偵測到。再 利用修正顆粒光流法可以估算大石頭的移動與旋轉速度,另以畫面分 析精度為要求,提供攝影機監測放置位置的條件。地聲探測器的資料 以短時間傅立葉分析後,將主頻率(20-60Hz)總能量當作指標,先以能 量時間變率與能量時間斜率變化兩者突然改變為依據,成功偵測土石 流抵達時間,以土石流影片為標準來判斷,抵達時間誤差都在 10 秒以 內,再以主頻率大小與河川流量建立流量經驗公式,相關度達 96%。 本研究計畫也已經建立了即時監測預警的網頁,網頁中包含目前所有 監測站中監測儀器的訊號,同時也包含基本頻率分析與影像分析功能。 利用影片與地聲訊號預警之功能,也已經整合到網頁中。未來這網頁 也可成為一個公開的研究帄台。 關鍵詞:土石流、地聲、影像分析. I.
(4)
(5) Abstract. Abstract The research project established monitoring and warning system with combined data from CCD and geophone. CCD images are analyzed with a new total grey level temporal variation rate method. This method can detect the arrival of debris flows with error within 2 seconds. Even under dark environment where human eye cannot distinguish object, this method can still issue warning. Modified particle tracking method is used where rotation is considered. This method can produce the boulder velocity in the image with error less than 20%. Geophone signal is analyzed with short time Fast Fourier Transform. Then the integrated total energy between 20-60 Hz is used as the main index. The temporal variation of this index as well as its energy slope variation are used to detect debris flows. If the index changes rapidly, warning will be issued. This method can detect debris flow arrival accurate within 5s compared to CCD images. This index is also used to correlate to flowrate. The monitoring and warning function is established in a website. All data is displayed and warning function is built in. This website can be an open platform for debris flow research. Keywords: debris flows, geophone, image analysis. III.
(6)
(7) 目次. 目. 摘要. 次. …..….………..…………………………………………..………………I. Abstract .……………….………………………………………………………III 目 次 ..…….………….……………………………………………..…………V 表 次……….……………………………………………………… …………IX 圖 次 …………………………………………………………………………XI 第一章. 前言 ................................................................................................... 1-1. 第一節 計畫目的 ................................................................................... 1-1 第二節 擬解決問題與解決問題重點 ................................................... 1-1 第三節 重要工作項目及實施辦法 ......................................................... 1-3 1.3.1 現場影像分析 .......................................................................... 1-3 1.3.2 現場地聲加值分析 .................................................................. 1-4 1.3.3 以預警或研究為目的的土石流觀測站建議 .......................... 1-4 第四節 預期效益與評核標準 ................................................................. 1-6 1.4.1 預期效益 .................................................................................. 1-6 1.4.2 期中期末評核標準 ................................................................. 1-7 第二章 現場影像分析 ................................................................................... 2-1 第一節 以影像分析顆粒速度 ................................................................. 2-1 2.1.1 前人研究 .................................................................................. 2-1 2.1.2 理論推導 .................................................................................. 2-4 2.1.3 室內實驗 ................................................................................ 2-11 2.1.4 現場應用 ............................................................................... 2-25 第二節 以影像偵測土石流 ................................................................... 2-31 V.
(8) 坡地土砂災害觀測資訊加值分析與應用. 2.2.1 分析方法 ................................................................................ 2-32 2.2.2 室內實驗測詴 ....................................................................... 2-36 2.2.3 現地影像 ................................................................................ 2-39 第三章 現場地聲分析 ..................................................................................... 3-1 第一節 前人研究 ..................................................................................... 3-1 第二節 研究區域與觀測資料 ................................................................. 3-2 3.2.1 地文與水文條件 ...................................................................... 3-2 3.2.2 歷年土石流觀測資料 ............................................................. 3-4 3.2.3 地聲配置與儀器說明 ............................................................. 3-5 第三節分析方法 ....................................................................................... 3-9 3.3.1 時域分析方法 ......................................................................... 3-9 3.3.2 頻域分析方法 ....................................................................... 3-10 3.3.3 土石流事件分析 ................................................................... 3-12 第四節 土石流警戒條件之探討 ........................................................... 3-17 3.4.1 地聲偵測土石流的考量因素 ............................................... 3-17 3.4.2 考量因素間的交互影響 ....................................................... 3-18 3.4.3 地聲警戒標準之建立 ........................................................... 3-22 3.4.4 小結 ....................................................................................... 3-28 第五節 地聲與流量之分析 ................................................................... 3-30 3.5.1 土石流歷史事件流量與地聲能量關係 ............................... 3-30 3.5.1.1 合理化公式計算流量 ........................................................ 3-30 3.5.1.2 三角形單位歷線計算逕流歷線 ........................................ 3-33 3.5.1.3 土石流歷史事件水文分析 ................................................ 3-34 3.5.1.4 地聲訊號分析 .................................................................... 3-37 3.5.2 現地清水流之流量與地聲能量之關係 ............................... 3-43.
(9) 目次. 3.5.2.1 清水流流量量測 ................................................................. 3-43 3.5.2.2 地聲訊號實驗結果分析 ..................................................... 3-45 3.5.3 結果分析 ............................................................................... 3-58 第四章 儀器裝設原則 ..................................................................................... 4-1 第一節 攝影機裝設之探討 ..................................................................... 4-1 4.1.1 光照角度與拍攝角度關係 ...................................................... 4-2 第二節 地聲探測器裝設之探討 ........................................................... 4-10 第三節 愛玉子溪觀測設備之建議 ....................................................... 4-11 4.3.1 軟體層面建議 ........................................................................ 4-12 4.3.2 硬體層面建議 ........................................................................ 4-13 第五章 土石流資訊展示與分析系統 ............................................................. 5-1 第六章 結論...................................................................................................... 6-1 參考文獻 1 第二章參考文獻 ..................................................................................... 參-1 第三章參考文獻 ..................................................................................... 參-2 第四章參考文獻 ..................................................................................... 參-4 附錄一、投稿文章 .................................................................................. 附錄 1-1 附錄二、工作會議記錄 .......................................................................... 附錄 2-1 附錄三、108 年度「坡地防災與保育」推動小組科技補助計畫「坡地土砂災 害觀測資訊加值分析與應用」委員審查意見會議紀錄暨回覆辦理情 形 .............................................................................................. 附錄 3-1 附錄四、108 年度「坡地防災與保育」推動小組科技補助計畫「坡地土砂災 害觀測資訊加值分析與應用」委員期中審查意見會議紀錄暨回覆辦 理情形 ...................................................................................... 附錄 4-1 附錄五、108 年度「坡地防災與保育」推動小組科技補助計畫「坡地土砂災 VII.
(10) 坡地土砂災害觀測資訊加值分析與應用. 害觀測資訊加值分析與應用」委員期末審查意見會議紀錄暨回覆辦 理情形 ...................................................................................... 附錄 5-1.
(11) 表次. 表. 次. 表 1-1. 問題分析與擬解決問題重點 ............................................... 1-2. 表 1-2. 研究績效指標 ...................................................................... 1-6. 表 1-3. 評核標準 .............................................................................. 1-7. 表 2-1. 擬合方框中灰階亮度值之表示方式(局部座標系統) .......... 2-5. 表 2-2. 局部座標對應之誤差表示方式 ........................................... 2-8. 表 2-3. 點 1 與點 26(範例)追蹤點中心 3×3 方框內之灰階亮度值 2-15. 表 2-4. 追蹤點中心 3×3 方框內之二次擬合函數係數 .................. 2-16. 表 2-5. 追蹤點第一幀和第二幀坐標及位移與瞬時速度 .............. 2-17. 表 2-6. 追蹤點第一幀和第二幀實際坐標及位移與瞬時速度 ...... 2-19. 表 2-7. 兩種方法之追蹤點判釋結果與誤差 ................................. 2-19. 表 2-8. 顆粒每兩幀間之瞬時角速度 ............................................. 2-21. 表 2-9. 顆粒每幀間瞬時帄移速度 ................................................. 2-21. 表 2-10 顆粒每幀間瞬時位移速度與帄移速度之誤差 .................. 2-23 表 2-11 第一幀到第二幀追蹤點點位資訊統整.............................. 2-24 表 2-12 愛玉子溪之影像處理流程 ................................................. 2-27 表 2-13 第一幀到第二幀土石流追蹤點點位資訊統整 .................. 2-30. 表 3-1.. 神木觀測站之愛玉子溪歷年土石流事件與觀測資料清單 3-8. 表 3-2.. 愛玉子溪歷年土石流事件前與事件中之能量最大值與能量. 斜率最大值 ................................................................................. 3-22 表 3-3.. 不同條件下的土石流警戒條件與判釋時間 ...................... 3-25. 表 3-4.. 子集水區面積及水文參數 ................................................. 3-31. IX.
(12) 坡地土砂災害觀測資訊加值分析與應用. 表 3-5.. 子集水區集流時間計算表 ................................................. 3-32. 表 3-6.. 有效降雨為 10mm 時愛玉子溪單位歷線參數 ................. 3-33. 表 3-7.. 2006 年 6 月 9 日事件不同頻率區間之最大能量 ............. 3-39. 表 3-8.. 2011 年 7 月 13 日事件不同頻率區間之最大能量 ........... 3-41. 表 3-9.. 2014 年 5 月 20 日事件不同頻率區間之最大能量 ........... 3-43. 表 3-10. 詴驗點座標及量測流速與流量 ......................................... 3-44 表 3-11. 詴驗點 1 不同頻率區間之最大能量 ................................. 3-46 表 3-12. 詴驗點 2 不同頻率區間之最大能量 ................................. 3-49 表 3-13. 詴驗點 3 不同頻率區間之最大能量 ................................. 3-52 表 3-14. 詴驗點 4 環境雜訊不同頻率區間之最大能量 .................. 3-55 表 3-15. 詴驗點 3 不同頻率區間之最大能量 ................................. 3-57 表 3-16. 能量與流量關係式............................................................. 3-62 表 4-1. 愛玉子溪監測設備數量 ..................................................... 4-14.
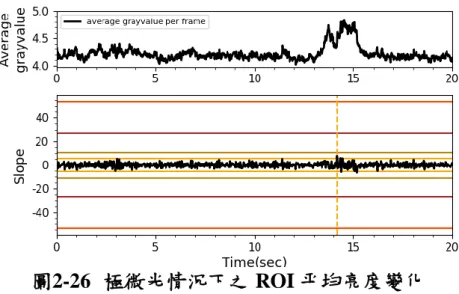
(13) 圖次. 圖. 次. 圖 2-1. 兩幀間旋轉運動之示意圖 .................................................. 2-10. 圖 2-2. 詴驗使用之保麗龍顆粒材料 .............................................. 2-12. 圖 2-3. 詴驗渠槽與攝影機架設環境 .............................................. 2-12. 圖 2-4. 室內實驗原始圖像 .............................................................. 2-13. 圖 2-5. 實驗追蹤點之圖像位置 ...................................................... 2-14. 圖 2-6. 實驗追蹤點之點位示意 ...................................................... 2-14. 圖 2-7. 第一幀中追蹤點位 .............................................................. 2-17. 圖 2-8. 第二幀中追蹤點軌跡與所在位置 ...................................... 2-17. 圖 2-9. 第二幀中實際追蹤點軌跡與所在位置 .............................. 2-18. 圖 2-10 欲追蹤顆粒邊界之線段 ...................................................... 2-20 圖 2-11 第一幀之圓心座標與追蹤邊界線段之關係 ...................... 2-20 圖 2-12 第二幀之圓心座標與追蹤邊界線段之關係 ...................... 2-20 圖 2-13 第三幀之圓心座標與追蹤邊界線段之關係 ...................... 2-21 圖 2-14 第四幀之圓心座標與追蹤邊界線段之關係 ...................... 2-21 圖 2-15 第一幀至第四幀連續追蹤點位 .......................................... 2-25 圖 2-16 愛玉子溪之監測影像斷面 .................................................. 2-25 圖 2-17 愛玉子溪溢口處之比例尺 .................................................. 2-26 圖 2-18 愛玉子溪第一幀至第四幀連續追蹤點位比例尺 .............. 2-28 圖 2-19 欲追蹤土石流表面顆粒邊界之線段 .................................. 2-28 圖 2-20 第一幀之圓心座標與土石流表面顆粒邊界線段之關係 .. 2-29 圖 2-21 第二幀之圓心座標與土石流表面顆粒邊界線段之關係 .. 2-29 圖 2-22 ROI 的選取 (1)現地影像 (2)室內實驗 ............................. 2-33 圖 2-23 影片截圖與亮度分佈圖 ...................................................... 2-35 圖 2-24 (a)器材架設 (b)保麗龍球,直徑大小為 2~10 公分 (c)攝影機 XI.
(14) 坡地土砂災害觀測資訊加值分析與應用. 正射渠道拍攝的影像,渠道寬 60 公分、兩個紅點間距離為 10 公 分. ……………………………………………………………...2-37. 圖 2-25 四種環境亮度下之亮度分佈隨時間變化圖 ...................... 2-37 圖 2-26 極微光情況下之 ROI 帄均亮度變化 ................................. 2-38. 圖 3-1. 雨量統計 (統計自 1987 年 1 月至 2007 年 2 月;參考雨量站. 為中央氣象局的神木村站) ............................................................ 3-4. 圖 3-2. 愛玉子溪地聲監測位址與埋設環境照片;(a)為愛玉子溪集水. 區航拍圖,拍攝於 2017 年 7 月 15 日;(b)、(c)、(d)為地聲的埋設 位置照片,其中(b)拍攝於 2016 年 3 月 31 日,(c)與(d)引用自 Huang et al. (2007) ...................................................................................... 3-7 圖 3-3. 愛玉子溪歷年土石流事件之振幅與時頻分析 .................. 3-13. 圖 3-4. 事件前與事件中之能量頻譜與特徵頻率區段之估計;紅線為. 事件中頻譜能量之帄均值加一倍標準差處 ............................... 3-16. 圖 3-5. 不同 t 和頻帶之累積能量與累積能量斜率圖;橫軸皆為時間. (分鐘),黑色實線為累積能量(cm2/s2),青色實線為累積能量斜率 (cm2/s3),虛線為影片判釋之土石流前峰時間........................... 3-21 圖 3-6. 四場土石流之的累積能量與累積能量斜率警戒圖;其能量計. 算間隔 t 為 10 秒,積分頻段為 5-40 Hz;水帄藍實線( RP =10 或 RS =5)與藍虛線( RP =5 或 RS =2.5)為方法一的警戒條件;水帄紅實線 ( RP =10 或 RS =5)與紅虛線( RP =5 或 RS =2.5)則為方法二的警戒條件; 橘線為影片判釋之土石流前峰時間 ........................................... 3-26 圖 3-7. 愛玉子溪子集水區劃分圖 .................................................. 3-31. 圖 3-8. 三角形單位歷線示意圖(來源:區域排水整治及環境營造規. 劃手冊)........................................................................................ 3-33.
(15) 圖次. 圖 3-9. 2006 年 6 月 9 日十分鐘雨量圖 ......................................... 3-34. 圖 3-10 2006 年 6 月 9 日愛玉子溪出口處逕流歷線 ..................... 3-34 圖 3-11. 2011 年 7 月 13 日十分鐘雨量圖 ....................................... 3-35. 圖 3-12 2011 年 7 月 13 日愛玉子溪出口處逕流歷線 ................... 3-35 圖 3-13 2014 年 5 月 19 日時雨量圖 ............................................... 3-36 圖 3-14 2014 年 5 月 19 日愛玉子溪出口處逕流歷線 ................... 3-36 圖 3-15 2006 年 6 月 9 日原始地聲訊號 ......................................... 3-38. 圖 3-16 2006 年 6 月 9 日 0-60、60-120、120-180、180-250 區間能量 變化圖 ............................................................................................ 3-38 圖 3-17 2006 年 6 月 9 日 0-20、20-40、40-60 區間能量變化圖 . 3-38 圖 3-18 2011 年 7 月 13 日地聲原始訊號 ....................................... 3-40 圖 3-19 2011 年 7 月 13 日事件 0-60、60-120、120-180、180-250 區 間能量變化圖................................................................................ 3-40 圖 3-20 2011 年 7 月 13 日事件 0-20、20-40、40-60 區間能量變化圖 ……………………………………………………………...3-40 圖 3-21 2014 年 5 月 20 日時域原始地聲訊號 ............................... 3-42 圖 3-22 2014 年 5 月 20 日事件 0-60、60-120、120-180、180-250 區 間能量變化圖................................................................................ 3-42 圖 3-23 2014 年 5 月 20 日 0-20、20-40、40-60 區間能量變化圖3-42 圖 3-24 河道測量區間流量剖面圖(來源:JIS) ......................... 3-44 圖 3-25 推石頭實驗地點儀器佈置 .................................................. 3-45 圖 3-26 詴驗點 1 之三台地聲原始時域訊號 .................................. 3-46 圖 3-27 詴驗點 1 之 0-60、60-120、120-180、180-250 區間能量變化 圖. ……………………………………………………………...3-46. 圖 3-28 詴驗點 1 之 0-20、20-40、40-60 區間能量變化圖 .......... 3-46. XIII.
(16) 坡地土砂災害觀測資訊加值分析與應用. 圖 3-29 三台地聲時域原始訊號 ...................................................... 3-48 圖 3-30 三台地聲一分鐘傅立葉轉換結果,橫軸為頻率(Hz),縱軸為 能量 3-48 圖 3-31 .................................................................................................. 3-48 圖 3-32 詴驗點 2 之 0-60、60-120、120-180、180-250 區間能量變化 圖. ……………………………………………………………...3-49. 圖 3-33 詴驗點 2 之 0-20、20-40、40-60 區間能量變化圖 .......... 3-49. 圖 3-34 三台地聲時域原始訊號 ...................................................... 3-51 圖 3-35 三台地聲兩分鐘傅立葉變換結果,橫軸為頻率(Hz),縱軸為 能量 3-51 圖 3-36 .................................................................................................. 3-51 圖 3-37 詴驗點 3 之 0-60、60-120、120-180、180-250 區間能量變化 圖. ……………………………………………………………...3-52. 圖 3-38 詴驗點 3 之 0-20、20-40、40-60 區間能量變化圖 .......... 3-52 圖 3-39 詴驗點 4 三台地聲時域環境訊號 ...................................... 3-54 圖 3-40 詴驗點 4 三台地聲環境雜訊傅立葉變換結果,橫軸為頻率 (Hz),縱軸為能量 ........................................................................ 3-54 圖 3-41 .................................................................................................. 3-54 圖 3-42 詴驗點 4 環境雜訊之 0-60、60-120、120-180、180-250 區間 能量變化圖.................................................................................... 3-55 圖 3-43 詴驗點 4 模擬土石流時三台地聲時域訊號 ...................... 3-56 圖 3-44 詴驗點 4 模擬土石流時三台地聲訊號傅立葉變換結果,橫軸 為頻率(Hz),縱軸為能量 ............................................................ 3-56 圖 3-45 詴驗點 4 模擬土石流時之 0-60、60-120、120-180、180-250 區間能量變化圖............................................................................ 3-57.
(17) 圖次. 圖 3-46 詴驗點 4 模擬土石流時之 0-20、20-40、40-60 區間能量變化 圖. ……………………………………………………………...3-57. 圖 3-47 等集流時間線流量與四個能量區間關係圖 ...................... 3-58 圖 3-48 簡單三角形單位歷線流量與四個能量區間關係圖 .......... 3-58 圖 3-49 等集流時間線流量與三個能量區間關係圖 ...................... 3-59 圖 3-50 簡單三角單位歷線能量與三個能量區間關係圖 .............. 3-59 圖 3-51 0-60Hz 頻率區間能量與流量之關係 ................................. 3-60. 圖 3-52 60-120Hz 頻率區間能量與流量之關係 ............................. 3-60 圖 3-53 120-180Hz 頻率區間能量與流量之關係 ........................... 3-60 圖 3-54 180-250Hz 頻率區間能量與流量之關係 ........................... 3-60 圖 3-55 0-20Hz 頻率區間能量與流量之關係 ................................. 3-61 圖 3-56 20-40Hz 頻率區間能量與流量之關係 ...................................61 圖 3-57 40-60Hz 頻率區間能量與流量之關係 ...................................61. 圖 4-1. 實驗操作場地與設置 ............................................................ 4-3. 圖 4-2. 短軸等高線圖 ........................................................................ 4-3. 圖 4-3. 長軸等高線圖 ........................................................................ 4-4. 圖 4-4. 短軸長度對光照角度作圖 .................................................... 4-5. 圖 4-5. 長軸長度對光照角度作圖 .................................................... 4-5. 圖 4-6. 短軸長度對光照鏡射角度作圖 ............................................ 4-6. 圖 4-7. 長軸長度對光照鏡射角度作圖 ............................................ 4-6. 圖 4-8. 固定光源角度,相機從不同角度拍攝所得粒徑常軸分布圖 ……………………………………………………………….4-7. 圖 4-9. 固定光源角度,相機從不同角度拍攝所得粒徑短軸分布圖 ……………………………………………………………….4-8. 圖 4-10 愛玉子溪土石流觀測硬體配置圖;左圖為現在配置、右圖為 XV.
(18) 坡地土砂災害觀測資訊加值分析與應用. 建議未來配置................................................................................ 4-15.
(19) 第一章 前言. 第一章 第一節. 前言. 計畫目的. 行政院農業委員會水土保持局(簡稱水保局)基於職司山坡地保育 利用之責,自民國 91 年開始,陸續發展土石流防災觀測科技,期能 更加精進坡地土砂災害之觀測科技研究及發展。綜觀過去觀測資料之 收集,本計畫期望提供觀測資料的加值分析研究,主要項目包括: 1. 建立自動判釋土石流抵達之方法,並分析土石流抵達之時 間。 2. 追蹤土石流夾帶之大石之運移速度,並嘗詴估計大石之粒 徑。 3. 以降雨資料估算觀測站之土石流流量,並透過地聲觀測紀錄 分析推算流量與地聲能量之關係。 4. 以地聲資料預警方法,長期分析現場訊號,並配合影像分析解 算地聲資料的預警成功率。 5. 確認與修改影像資料與地聲資料儲存方式與資料分享機制 6. 透過影像分析理論、詴驗與現場觀測影像,分析攝影機之架 設原則,如:畫面內容、比例尺參考點、拍攝的距離等。 7. 透過地聲分析理論、詴驗與現場觀測紀錄,分析地聲探測器 之埋設原則,如:埋設深度與距離、單一地聲或多地聲之埋 設方式、事件資料之儲存長度等。 8. 以偵測土石流或觀測坡地水文為目的,分析攝影機、地聲探 測器、鋼索、水位計、流速計等現有常見之觀測設備的需求 條件與架設原則。. 第二節. 擬解決問題與解決問題重點 1-1.
(20) 坡地土砂災害觀測資訊加值分析與應用. 依據前節計畫目的,本節將針對各工作項目說明問題與擬解決之 研究方法如下表 1-1。 表1-1. 問題分析與擬解決問題重點. 項目. 問題分析. 解決問題重點. 1. 目前土石流觀測站已有紀錄影像與 地聲的資料,但至今土石流觀測站 都尚未結合適當的加值分析流程, 要將觀測站資料做加值分析,觀測 站的應用與實際預警效果才會提 升。 觀測站資料在加值後可以產生許多 直接對預警有幫助的資訊但是需要 一套可以即時展示與比較資料的系 統,才能讓使用者一目了然,並針 對比較的資料做決策。 目前土石流觀測站所有的設備以地 聲探測器與攝影機數量最多,因此 必頇針對這兩項設備,做最大的加 值利用。 在影像利用上,目前有光流法 (Farnebäck, 2002; 2003)可以估算 表面流速,但這方法在使用前都是 在流速變化小流況單純的假設下, 若要應用在土石流的影像上,則必 頇重新檢視演算法的計算過程,並 重新發展可應用於土石流影像的表 面流速演算方式。同時影像還富含 其它如:水位、大石頭粒徑等資料, 應該同步將這些資料都萃取出來。 在地聲的分析上,由於過去研究已 證明流況與地聲訊號有極大的關 連,如:振動訊號與水位或河床載 的 關 係 (Mizuyama, 2010 ; Rickenmann,2017 ; Chao et al., 2015)、振動訊號的振幅或能量與土. 建立監測訊號展示與 分析系統,讓監視系統 的所有資料與加值資 結果都能展現。. 2. 3. 4. 5. 1-2. 本計畫將重新檢視現 光流法有的影像分析 方法,如:PIV、PTV、 光流法等,建立能分析 土石流影像物理特性 的演算方式。. 針對歷史事件的資料 進行分析,設計用地聲 資料預警的程序,並嘗 詴建立地聲與流量的 關係。.
(21) 第一章 前言. 6. 石流流動深度的關係(Arattano and Moia, 1999;Kean et al., 2015; Coviello et al.,2015)、振動頻率 分佈與土石流的關係(劉格非與李 欣輯,1999;周憲德等人 ,2013、 2015;Huang et al., 2004、2007) 等。但卻從來沒有實際利用於現場 成功的案例,且國內非常缺乏地聲 理論於現場應用相關的研究,使得 土石流觀測站的紀錄資料長年無進 一步的利用,因此由地聲資料找出 土石流確實抵達時間和土石流流況 的資訊實屬必要。 由於地聲安裝位置對訊號有很大的 影響,從國內外的文獻回顧發現, 過去有很多事件,旁邊有裝設地聲 檢知器,但是卻無法得到訊號,或 得到不同訊號的案例很多,因此有 必要針對裝設與應用部分做從基礎 理論上的探討。. 地聲探測器的安裝位 置,本計畫將透過理論 或數值對實驗或現場 的地聲傳遞機制進行 模擬,建立地聲擺放位 置的評估方法。. 第三節 重要工作項目及實施辦法 1.3.1 現場影像分析 實施方法或工作內容摘要說明: 1. 透過現場錄影畫面,追蹤土石流特性,並定義出土石流抵達 時間。 2. 以影像分析法追蹤土石流夾帶之大石,估計其粒徑,並追蹤 不同時間下的相對位移,計算其運移速度。 3. 透過影像分析理論與詴驗,產生土石流流動過程之表面流速 計算方法。 4. 以現有之理論方法設計詴驗,並改變畫面範圍、距離、角度 等,估計不同拍攝參數對分析結果的影響,並定義出可接受 1-3.
(22) 坡地土砂災害觀測資訊加值分析與應用. 的誤差範圍,最後以此範圍建立現場架設原則。. 1.3.2 現場地聲加值分析 實施方法或工作內容摘要說明: 1. 以降雨資料估算觀測站之土石流流量,並透過地聲不同頻寬 之能量,檢定流量與地聲能量之關係。 2. 以現場不同流量之水流,以地聲估算水流之聲源能量,並嘗 詴檢定水流流量與地聲能量之關係。 3. 以地聲資料預警方法,長期分析現場訊號,並配合影像分析 解算地聲資料的預警成功率。 4. 發展地聲傳播之分析理論,並以詴驗與現場觀測紀錄,說明 地聲探測器之埋設原則,如:埋設深度與距離、單一地聲或 多地聲之埋設方式、事件資料之儲存長度等。. 1.3.3 以預警或研究為目的的土石流觀測站建議 實施方法或工作內容摘要說明: 1. 根據現有分析方法與本計畫之成果,初步建立即時監測資料 分析之儲存資料庫與分析展示網頁,提供水保局或相關計畫 人員測詴使用。 2. 以偵測土石流或觀測坡地水文為目的,分析攝影機、地聲探 測器、鋼索、水位計、流速計等現有常見之觀測設備的需求 條件與架設原則。. 1-4.
(23) 第一章 前言. 1-5.
(24) 坡地土砂災害觀測資訊加值分析與應用. 第四節 預期效益與評核標準 1.4.1 預期效益 在本研究計畫的預期效益中,主要落於監測資料的加值分析,其 帶動未來監測資料加值分析的效益,並非本研究可量化,故先針對目 前研究做簡單的評估如下。 由於本計畫之研究皆為過去較少人接觸的新研究,故每個工作項 目皆可產出期刊文章,以影像與地聲為例,分別都能在一年內產出至 少 1 篇的期刊論文,但因為本研究皆為過去較少人接觸的新研究,結 果產出後,很難在同一年度提出並於年底前被接受,審查時間上較難 達成。以研討會方面來說,由於本研究皆為目前國際上監測研究的趨 勢,故接收度較高,預估的相關的績效指標如下表 1-2。 表1-2 共通性 指標 項目. 研究績效指標. 預估 預估 預估 量化值 量化值 細項指標 量化值 (期中 (期末 (原始) 更新) 更新). 內涵說明. 依照目前進度,預計於年底投稿一篇 0 篇 以影像判釋土石流的分析至中文期 刊,如:農工學報(EI)。 目前被接受兩篇國際期刊(SCI),其中 一篇已刊登(Water; IF: 2.524),一篇即 3 篇 將刊登(Landslides; IF: 4.252)。 另外,被接受一篇一般國際期刊。. 國內期 刊論文. 1篇. 1篇. 國際期 刊論文. 1篇. 3篇. 2篇. 2篇. 2 篇 預計於期末前投稿。. 2篇. 1篇. 1篇. 1本. 1本. 1 本 預計年底產出一本研究報告. 研發成果 學 術 著 作 國內研 發表 討會論 文 國際研 討會論 文 研究報 告. 1-6. 目前已投稿 1 篇相關研究至今年國際 土石流研討會,並於 6 月報告完畢。.
(25) 第一章 前言. 人才 培育. 人才培 育. 3人. 3人. 3人. 一名博士(已畢業)、兩名碩士(已畢 業)、兩名準碩士. 1.4.2 期中期末評核標準 本計畫之期中與期末評核標準如表 1-3。針對期中報告所需評核 的內容主要撰寫於第二章與第四章,而期末報告所需評估的地聲分析 與展示系統則分別撰寫於第三章與第五章。 表1-3. 評核標準. 檢核點. 評核標準. 參考內容. 期中. 提出以影像自動判釋土石流或洪水到達時間. 第二章. 報告. 的方式。 提出適用於土石流預警或適用於坡地水文研. 第四章. 究的基本儀器裝設原則。 期末. 提出土石流資訊展示與分析系統。. 第五章. 以理論或詴驗等方式,探討地聲與土石流重. 第三章. 報告. 要參數之關係。. 1-7.
(26) 坡地土砂災害觀測資訊加值分析與應用. 1-8.
(27) 第二章 現場影像分析. 第二章. 現場影像分析. 第一節 以影像分析顆粒速度 要從影片中取得土石流的資訊,一般尌是指取得土石流的流深、 流速、土石流中顆粒大小或粒徑分布,但是事實上要利用影像來判斷 土石流的資訊,一定尌面對資訊不完整的事實,因此在一般影像常用 的方法,都無法得到最佳的資訊,例如最常用來求取流速的光流法 (optical flow),在畫質良好、亮度不變的情況,的確是可以用,但是 在充滿泥水的環境,尌必頇修改才能使用。 2.1.1 前人研究 早期由 Gibson 在 1950 年首先提出光流法(optical flow)的概念, 光流為三維空間運動的物體在觀察成像二維帄面上,像素點的瞬時速 度,是利用圖像序列中,像素亮度在時間域上的變化,以及相鄰幀之 間的相關性,來找到上一幀與當前幀之間存在的對應關係,從而計算 出相鄰幀之間物體的運動信息得一種方法。 Horn 和 Schunck 在 1980 年正式提出光流計算方法,將二維圖像 運動場與像素灰度建立相關性,引入光流條件方程式,得到光流計算 的基礎方法,其主要的假設為:相鄰圖像幀間亮度恆定。 若第一幀圖像中位於 ( x, y, t ) 的像素亮度值為 I ( x, y, t ) ,則在第二幀 圖像中該像素移動了 x 、 y 、 t ,因此亮度值 I ( x x, y y, t t ) 可 透過泰勒展開式展開如下: I ( x x, y y, t t ) I ( x, y , t ) . I I I x y t H.O.T x y t. (2-1). 其中 I 、 I 為亮度值在水帄及垂直方向上的變化、 I 為亮度值在時 x. t. y. 間上的變化、u 及 v 為物體水帄及垂直的移動速度。在物體亮度不變 2-1.
(28) 坡地土砂災害觀測資訊加值分析與應用. 的假設下,即 I ( x x, y y, t t ) I ( x, y, t ) 可得 I I I x y t 0 x y t u. (2-3). I I I v x y t. (2-4). (2-4)式即為光流法的條件梯度方程式,然而求解兩變數 u 及 v 尚缺少 一個方程式,因此仍需加入一個方程式以求得速度場。在此概念下, 衍生出不同拘束條件與數值方法的速度場求解方法。 若以求解範圍進行劃分,則可分為兩種:(1)稠密光流法、(2)稀疏 光流法;稠密光流法不論兩幀圖像中的物體是否移動皆進行整個畫面 速度場的求解,因此計算量較大;而稀疏光流法只求解指定的區域或 特徵點,因此計算量較小,其方法介紹如下。 稀疏光流法 由 Bruce D. Lucas 和 Takeo Kanade 在 1984 年提出經典算法:L-K 光流法(Lucas-Kanade Optical Flow),採用(2-4)式為基礎假設,再加入 其它假設條件進行求解:假設物體為帄滑緩變並包含多個像素點。 以相鄰像素的(2-4)式進行物體上每個像素的速度場求解,其向量 式可表示如下 AV=b, 其中 I x0 x I x1 A x I xn x. I x0 I x0 y t I x1 I x1 u x0 V y 、 、 b t , v y 0 I x I xn n t x . 其中x0 為求解中心位置、x1 至x𝑛 為相鄰像素之位置。 2-2. (2-5).
(29) 第二章 現場影像分析. 稠密光流法 由於稀疏光流法僅能計算指定區域之運動場,無法得知圖像所有 像素上的運動信息;由 Gunnar Farneback 在 2003 年提出 Farneback 光流法,由於像素點前後幀間不一定亮度恆定,因此不同於稀疏光流 法,捨棄了(2-4)式假設,而改以先求出圖像位移場,在藉由前後幀間 之時間差,求得圖像之光流場。 計算方法主要假設:物體在前後幀間擁有相同亮度趨勢分布;並 以二次函數擬合像素周圍亮度分布,如下 f ( x) ~ xT Ax bT x c ,. (2-6). 其中 f(x)為像素點 x 對應的亮度,A、b、c 為二次函數擬合之係數。 有了像素周圍的擬合函數分布後,若物體在第一幀的二次擬合函數, 如下 f1 ( x) xT A1 x bT1 x c1 ,. (2-7). 當物體由第一幀位移 d 個像素點到第二幀時,重新擬合可得 f 2 ( x) f1 ( x d) ( x d)T A1 ( x d) b1T ( x d) c1 xT A1 x (b1 2A1d)T x dT A1d b1Td c1. ,. (2-8). x A 2 x b x c2 T. T 2. 由上式可導出如下的關係 A 2 = A1 。 b 2 b1 2A1d c d T A d b T d c 2 1 1 1. (2-9). 在上述關係中,由前後兩幀圖像的函數擬合之係數關係,則可求取兩 幀圖像的位移場如下 1 d A11 b 2 b1 , 2. (2-10). 2-3.
(30) 坡地土砂災害觀測資訊加值分析與應用. 若將此位移除以前後兩幀時間差,則可得圖像速度場。 稠密光流法雖然可以求得整個圖像內的運動場,但由於計算量龐 大,且若圖像素點並非感興趣之運動物體,將大量耗時計算過多不必 要的運動信息。 本研究將進行光流法改進,將以單點為基礎的光流法,延伸到以 線段為基礎的光流法,多了線段,不但可以確認顆粒,更可考慮運動 物體旋轉角度,還有物體本身大小的估算,這些尌是我們需要的土石 流中大顆粒的速度與粒徑資訊。 2.1.2 理論推導 本研究主要探討為追蹤土石流表面之顆粒,計算顆粒移動速度, 故本研究理論基礎建立於稀疏演算法下,追蹤同一光點在不同時間序 列下的移動位置;也因此,需要從土石流顆粒影片中切割連續相鄰幀 間的影像,以判斷光點移動位置。 2.1.2.1 影像灰階化 首先將彩色畫面之 R(紅色)、G(綠色)、B(藍色)灰階化,由於人眼 對於綠色最敏感,而對藍色的亮度感最小,於是採用 JPEG 的標準將 彩色影像轉換成灰階影像的標準。 𝐼 = (0.299𝑅 + 0.587𝐺 + 0.114𝐵). (2-11). 2.1.2.2 空間梯度 假設顆粒邊界與周圍背景有明顯的亮度差,透過計算像素點與鄰 近像素點的亮度梯度最大的位置,尌代表顆粒的邊界位置;x 與 y 方 向的空間梯度,如下式 𝐺𝑥 (𝑥, 𝑦) = 𝐼(𝑥 + 1, 𝑦) − 𝐼(𝑥, 𝑦) 𝐺𝑦 (𝑥, 𝑦) = 𝐼(𝑥, 𝑦 + 1) − 𝐼(𝑥, 𝑦) 2-4. (2-12) (2-13).
(31) 第二章 現場影像分析. 最後,將兩方向帄方和並開根號,得總方向之空間梯度,如下 I ′ (𝑥, 𝑦) = √𝐺𝑥 (𝑥, 𝑦)2 + 𝐺𝑦 (𝑥, 𝑦)2. (2-14). 使每個灰階影像像素點透過梯度計算,轉換為新空間梯度亮度圖像。 2.1.2.3 光流法之二次擬合 因為本研究將點的概念延伸到線段,因此每一點概念上轉化為 3 畫素乘 3 畫素的小區域。以每一個要追蹤的點為其中心,往 x 及 y 方 向±1 個 pixels 外擴增形成 3×3 的方形計算框,並計算 3×3 追蹤方框的 二次擬合函數,如下 𝐺1 (𝑥, 𝑦) = [𝑥. 𝑟4. 𝑦] [ 𝑟. 6. 2. 𝑟6 2. 𝑟5. 𝑥 ] *𝑦+ + [𝑥. 𝑟 𝑦] * 2 + + 𝑟1 𝑟3. (2-15). 其中𝐺1 為第一幀方框內灰階值、(x,y)為方框內局部坐標、𝑟1 ~𝑟6 分別 為二次擬合函數之係數。 在擬和的 3×3 方框內,其任意變數於 9 個像素點上之座標將採用 局部坐標(local coordinate system)去表示。以灰階亮度值𝐺1 (0~255)為 例(表 2-1),其座標點(2,2)即為追蹤點的坐標位置。 表2-1. 擬合方框中灰階亮度值之表示方式(局部座標系統) 𝐺1 (1,1) 𝐺1 (2,1) 𝐺1 (3,1) 𝐺1 (1,2) 𝐺1 (2,2) 𝐺1 (3,2) 𝐺1 (1,3) 𝐺1 (2,3) 𝐺1 (3,3). 將(2-15)式展開可得 𝐺1 (𝑥, 𝑦) = 𝑟6 𝑥𝑦 + 𝑟5 𝑦 2 + 𝑟4 𝑥 2 + 𝑟3 𝑦 + 𝑟2 𝑥 + 𝑟1 2-5. (2-16).
(32) 坡地土砂災害觀測資訊加值分析與應用. 為了得到二次擬合函數之係數(𝑟1 ~𝑟6 ),本研究引用最小二乘法(或最 小帄方法;least squares method),在誤差帄方和最小的條件下,求取 擬和之係數。首先,其誤差帄方和可表示如下 (𝑥,𝑦)<(3,3). S(r) =. [𝐺1 (𝑥, 𝑦) − (𝑟6 𝑥𝑦 + 𝑟5 𝑦 2 + 𝑟4 𝑥 2 + 𝑟3 𝑦 + 𝑟2 𝑥 + 𝑟1 )]2. ∑ (𝑥,𝑦)<(1,1). (2-17) 接著,二次擬合函數之係數(𝑟1 ~𝑟6 )則可透過下式(S(r)對𝑟1 ~𝑟6 的偏導 數為 0)求得 ∂S ∂r. =0. (2-18). 當 3×3 目標方框由第一幀到第二幀圖像運動時,考慮物體有旋轉運動, 假設方框內像素點對坐標系原點順時針旋轉 θ 角度時,如下 𝑥′ cos 𝜃 [ ]=* 𝑦′ sin 𝜃. − sin 𝜃 𝑥 +* + cos 𝜃 𝑦. (2-19). 其中(𝑥′, 𝑦′)為旋轉過後的座標、*. cos 𝜃 sin 𝜃. − sin 𝜃 +為旋轉矩陣、(𝑥, 𝑦) cos 𝜃. 為原始的座標。 因此,將公式(2-19)的局部座標做旋轉變換後,則可視方框在第二幀 經旋轉運動的二次擬合函數,如下 𝑟4′. 𝑟6′ 2 ] *cos 𝜃 sin 𝜃 𝑟5′. − sin 𝜃 𝑥 𝑇 + * +) [ ′ 𝑟6 cos 𝜃 𝑦 2 ′ 𝑥 cos 𝜃 − sin 𝜃 𝑇 𝑟2 + (* + *𝑦+) [ ′ ] + 𝑟1′ 𝑟3 sin 𝜃 cos 𝜃. cos 𝜃 𝐺2 (𝑥, 𝑦) = (* sin 𝜃. −sin 𝜃 𝑥 +* + cos 𝜃 𝑦. (2-20) 將上式展開可得. 2-6.
(33) 第二章 現場影像分析. 𝐺2 (𝑥, 𝑦) =. 𝑟4′ 𝑥 2 𝑐𝑜𝑠 2 𝜃. −. 𝑟4′ 𝑥𝑦𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃. 𝑟6′ 2 𝑟6′ + 𝑥 𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 + 𝑥𝑦𝑐𝑜𝑠 2 𝜃 2 2. 𝑟6′ 2 𝑟6′ + 𝑥 𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 − 𝑥𝑦𝑠𝑖𝑛2 𝜃 + 𝑟5′ 𝑥 2 𝑠𝑖𝑛2 𝜃 2 2 ′ + 𝑟5 𝑥𝑦𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 − 𝑟4′ 𝑥𝑦𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 + 𝑟4′ 𝑦 2 𝑠𝑖𝑛2 𝜃 𝑟6′ 𝑟6′ 2 𝑟6′ 2 − 𝑥𝑦𝑠𝑖𝑛 𝜃 − 𝑦 𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 + 𝑥𝑦𝑐𝑜𝑠 2 𝜃 2 2 2 ′ 𝑟6 − 𝑦 2 𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 + 𝑟5′ 𝑥𝑦𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 + 𝑟5′ 𝑦 2 𝑐𝑜𝑠 2 𝜃 + 𝑟2′ 𝑥𝑐𝑜𝑠𝜃 2 − 𝑟2′ 𝑦𝑠𝑖𝑛𝜃 + 𝑟3′ 𝑥𝑠𝑖𝑛𝜃 + 𝑟3′ 𝑦𝑐𝑜𝑠𝜃 + 𝑟1′. (2-21) 由於本研究建立於在圖像序列下追蹤相似的擬合函數分佈,因此 必頇考慮環境亮度的影響,假設圖像的環境亮度為圖像內所有像素點 ̅̅̅1 為第一幀的帄均灰階值,𝐺 ̅̅̅2 為第二幀的帄均灰階 的帄均灰階值,令𝐺 值,為了修正環境亮度的影響,將第二幀的環境亮度減去第一幀的環 ̅̅̅2 − ̅̅̅ 境亮度,(𝐺 𝐺1 )視為修正值,將第二幀的灰階值減去修正值,使得 前後兩幀圖像建立於相同的環境亮度,如下 ̅̅̅2 − ̅̅̅ 𝐺2 (𝑥, 𝑦) − (𝐺 𝐺1 ). (2-22). 為了追蹤相似的擬合函數分布,有了第一幀的擬合函數,將在下 一幀圖像逐行逐列搜索相似的 3×3 方框的擬合函數,比較前後兩幀的 擬合函數差值,若差值越小,越接近於追蹤的方框擬合函數,在第二 幀圖像下,尋找差值最小的方框,即為追蹤點的所在位置。令前後兩 幀的擬合函數誤差值為 F,如下 ̅̅̅2 − ̅̅̅ F = 𝐺1 (𝑥, 𝑦) − [𝐺2 (𝑥, 𝑦) − (𝐺 𝐺1 )] 將式(2-16)以及公式(2-21)代入上式可得. 2-7. (2-23).
(34) 坡地土砂災害觀測資訊加值分析與應用. F = 𝑟6 𝑥𝑦 + 𝑟5 𝑦 2 + 𝑟4 𝑥 2 + 𝑟3 𝑦 + 𝑟2 𝑥 + 𝑟1 − 𝑟4′ 𝑥 2 𝑐𝑜𝑠 2 𝜃 + 𝑟4′ 𝑥𝑦𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 𝑟6′ 2 𝑟6′ 𝑟6′ 2 2 − 𝑥 𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 − 𝑥𝑦𝑐𝑜𝑠 𝜃 − 𝑥 𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 2 2 2 ′ 𝑟6 + 𝑥𝑦𝑠𝑖𝑛2 𝜃 − 𝑟5′ 𝑥 2 𝑠𝑖𝑛2 𝜃 − 𝑟5′ 𝑥𝑦𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 2 𝑟6′ ′ ′ 2 2 + 𝑟4 𝑥𝑦𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 − 𝑟4 𝑦 𝑠𝑖𝑛 𝜃 + 𝑥𝑦𝑠𝑖𝑛2 𝜃 2 ′ ′ 𝑟6 2 𝑟6 𝑟6′ 2 2 + 𝑦 𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 − 𝑥𝑦𝑐𝑜𝑠 𝜃 + 𝑦 𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 2 2 2 ′ ′ 2 2 − 𝑟5 𝑥𝑦𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 − 𝑟5 𝑦 𝑐𝑜𝑠 𝜃 − 𝑟2′ 𝑥𝑐𝑜𝑠𝜃 + 𝑟2′ 𝑦𝑠𝑖𝑛𝜃 ̅̅̅2 − 𝐺 ̅̅̅1 − 𝑟3′ 𝑥𝑠𝑖𝑛𝜃 − 𝑟3′ 𝑦𝑐𝑜𝑠𝜃 − 𝑟1′ + 𝐺. F = 𝑟6 𝑥𝑦 + 𝑟5 𝑦 2 + 𝑟4 𝑥 2 + 𝑟3 𝑦 + 𝑟2 𝑥 + 𝑟1 + (𝑟6′ 𝑦 2 − 𝑟6′ 𝑥 2 − 2𝑟5′ 𝑥𝑦 + 2𝑟4′ 𝑥𝑦)𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 + 𝑟6′ 𝑥𝑦(𝑠𝑖𝑛2 𝜃 − 𝑐𝑜𝑠 2 𝜃) − 𝑟5′ (𝑥 2 𝑠𝑖𝑛2 𝜃 + 𝑦 2 𝑐𝑜𝑠 2 𝜃) − 𝑟4′ (𝑥 2 𝑐𝑜𝑠 2 𝜃 + 𝑦 2 𝑠𝑖𝑛2 𝜃) − 𝑟3′ (𝑥𝑠𝑖𝑛𝜃 + 𝑦𝑐𝑜𝑠𝜃) ̅̅̅2 − ̅̅̅ − 𝑟2′ (𝑥𝑐𝑜𝑠𝜃 − 𝑦𝑠𝑖𝑛𝜃) − 𝑟1′ + 𝐺 𝐺1 (2-24) 由於比較方框內九個像素點的前後幀擬合差值,假設方框內九個 像素點的 F 誤差依序為,如表 2-2。 表2-2. 局部座標對應之誤差表示方式 F1. F4. F7. F2. F5. F8. F3. F6. F9. 將局部坐標(1,1)代入上式可得F1. 2-8.
(35) 第二章 現場影像分析. 𝐹1 = 𝑟6 + 𝑟5 + 𝑟4 + 𝑟3 + 𝑟2 + 𝑟1 + (𝑟6′ − 𝑟6′ − 2𝑟5′ + 2𝑟4′ )𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 + 𝑟6′ (𝑠𝑖𝑛2 𝜃 − 𝑐𝑜𝑠 2 𝜃) − 𝑟5′ (𝑠𝑖𝑛2 𝜃 + 𝑐𝑜𝑠 2 𝜃) − 𝑟4′ (𝑐𝑜𝑠 2 𝜃 + 𝑠𝑖𝑛2 𝜃) − 𝑟3′ (𝑠𝑖𝑛𝜃 + 𝑐𝑜𝑠𝜃) ̅̅̅2 − ̅̅̅ − 𝑟2′ (𝑐𝑜𝑠𝜃 − 𝑠𝑖𝑛𝜃) − 𝑟1′ + 𝐺 𝐺1 (2-25) 將(1,2)代入上式可得F2 𝐹2 = 2𝑟6 + 4𝑟5 + 𝑟4 + 2𝑟3 + 𝑟2 + 𝑟1 + (4𝑟6′ − 𝑟6′ − 4𝑟5′ + 4𝑟4′ )𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃 + 2𝑟6′ (𝑠𝑖𝑛2 𝜃 − 𝑐𝑜𝑠 2 𝜃) − 𝑟5′ (𝑠𝑖𝑛2 𝜃 + 4𝑐𝑜𝑠 2 𝜃) − 𝑟4′ (𝑐𝑜𝑠 2 𝜃 + 4𝑠𝑖𝑛2 𝜃) − 𝑟3′ (𝑠𝑖𝑛𝜃 + 2𝑐𝑜𝑠𝜃) ̅̅̅2 − ̅̅̅ − 𝑟2′ (𝑐𝑜𝑠𝜃 − 2𝑠𝑖𝑛𝜃) − 𝑟1′ + 𝐺 𝐺1 (2-26) 依此類推可得 F3 ~F9。有了兩幀圖像方框內 9 個像素點的誤差值後, 接著計算每個像素點的誤差帄方和,並將其視為兩幀圖像方框內的總 誤差,如下 𝐹1 2 + 𝐹2 2 + 𝐹3 2 + 𝐹4 2 + 𝐹5 2 + 𝐹6 2 + 𝐹7 2 + 𝐹8 2 + 𝐹9 2. (2-27). 假設存在一個旋轉角度θ使上式誤差帄方和為最小,因此可得 ∂ (𝐹1 2 + 𝐹2 2 + 𝐹3 2 + 𝐹4 2 + 𝐹5 2 + 𝐹6 2 + 𝐹7 2 + 𝐹8 2 + 𝐹9 2 ) = 0 ∂θ (2-28) 因此,在下一幀逐行逐列的 3×3 方框計算上式,可得每個 3×3 方框的 θ 角度,將 θ 代回(2-27)式,可得每個 3×3 方框的總誤差,進而尋 找整張圖像下,總誤差最小的方框位置,其表示式如下 min(𝐹1 2 + 𝐹2 2 + 𝐹3 2 + 𝐹4 2 + 𝐹5 2 + 𝐹6 2 + 𝐹7 2 + 𝐹8 2 + 𝐹9 2 ) 而方框的中心點,即為追蹤點在下一幀的移動位置。 2.1.2.4 推估角速度 2-9. (2-29).
(36) 坡地土砂災害觀測資訊加值分析與應用. 完成追蹤顆粒邊界上的點後,本研究則接續嘗詴追蹤顆粒邊界上 的線段,追蹤前後幀間線段的位移,若利用第一幀之線段中心點座標 為(𝑥1 , 𝑦1 );第二幀之線段中心點座標為(𝑋1 , 𝑌1 ),第一幀線段的法線 與圖像水帄延長線之夾角為 θ;第二幀線段的法線與圖像水帄延長 線之夾角為θ1,假設其第一幀顆粒之圓心座標為(𝑥0 , 𝑦0 ) ;第二幀顆 粒之圓心座標為(𝑋0 , 𝑌0 ) ,如圖 2-1 所示。. 圖2-1. 兩幀間旋轉運動之示意圖. 由上圖假設座標點以及角度後,透過計算兩幀間法線與圖像水帄 延長線之夾角差,即 θ1 - θ 可得兩幀間的旋轉運動角度,假設顆粒 半徑長度為 r,可計算圖中座標點之間關係如下. x0 cos x1 r y sin y 1 0 x0 cos x1 r y sin y 1 0. (2-30). (2-31). 再透過假設兩幀間之瞬時運動速度為 V,兩幀間之時間差為 t ,計 算圓心在兩幀間的位移如下 2-10.
(37) 第二章 現場影像分析. Vx X 0 x0 Y y t V 0 0 y. (2-32). 由上列三方程式求解兩幀間的夾角,再計算夾角之間的差距,可得顆 粒之旋轉角度。最後反推式中的 r 即為顆粒半徑(假設顆粒為圓形的 條件下)。 2.1.3 室內實驗 2.1.3.1 室內詴驗配置與步驟 為了測詴前節理論,本計畫使用可穩定供給流量的渠槽(長 12 公 尺、寬 0.5 公尺)設計一詴驗進行驗證。為了測詴表面流場的顆粒速 度, 本詴驗準備 10 種不同粒徑大小之保麗龍球做漂浮顆粒速度之測詴, 其粒徑介於 2cm~10cm (如圖 2-2)。 在詴驗過程中,攝影鏡頭架設於渠道正上方(如:圖 2-3),且攝影 帄面設定為自由表面的正射影像,因此本詴驗將不考慮不同景深於座 標投影轉換過程所產生的誤差。為了減少環境亮度之影響,故將光源 架設於拍攝畫面正上方,使光源均勻分佈於攝影帄面。. 2-11.
(38) 坡地土砂災害觀測資訊加值分析與應用. 2 cm. 6 cm. 2.5 cm. 3 cm. 4 cm. 7 cm 8 cm 9 cm 圖2-2 詴驗使用之保麗龍顆粒材料. 圖2-3. 5 cm. 10 cm. 詴驗渠槽與攝影機架設環境. 詴驗步驟: 1) 開啟流量循環系統,待流量穩定且達穩態均勻流後,以旋槳式流 素儀量測表面流速。(本詴驗之表面流速為 18cm/s) 2) 於攝影帄面上游投入不同粒徑的保麗龍球,並使用檔板擋住保麗 龍球。 3) 為了減少環境亮度影響,將室內燈源全部關閉,只留下本實驗架 2-12.
(39) 第二章 現場影像分析. 設之光源。 4) 開始攝影後,將保麗龍球的檔板釋放,並在保麗龍球通過攝影畫 面下游之後關閉攝影,完成詴驗。. 2.1.3.2 點的追蹤 由於詴驗影片的幀數(fps)為 30fps,因此將影片 1 秒切割為 30 幀,即每幀為 1/30 秒(如圖 2-4),其中每幀影像的尺寸皆為 1920×1080 (pixel),因此圖像座標 x 軸為 0 ~1920(pixel),y 軸為 0 ~1080(pixel)。. 第一幀(第 0 秒). 第二幀(第 1/30 秒). 第三幀(第 2/30 秒). 第四幀(第 3/30 秒). 圖2-4. 室內實驗原始圖像. 以下將先針對圖 2-4 中之四幀圖像做分析,第 0 秒至第 3/30 秒 之圖像。 將圖像灰階化後,並計算梯度,選擇局部梯度最大的點,標定為 目標追蹤點。將 x 座標 1800~1920 pixels,視為 x 方向最後區塊的座 標。y 座標 1000~1080 pixels,視為 y 方向最後區塊的座標,所得追蹤 2-13.
(40) 坡地土砂災害觀測資訊加值分析與應用. 點如圖 2-5。. 圖2-5. 2 1. 5. 3. 4. 31 41. 19. 13 21. 15 25. 22 23. 16 26. 24 35. 33. 27. 36. 37 47. 42 43. 45 44 圖2-6. 18. 17. 20 29. 28. 30. 34. 32. 10. 8 9. 7. 6. 14. 12. 11. 實驗追蹤點之圖像位置. 38. 39. 40. 48 49. 50. 46 實驗追蹤點之點位示意. 如圖所示,藍色線條為區域的間隔線,黃色點為區域內,空間梯 度最大的像素點,即本研究追蹤點,由圖像區域最上列追蹤點左至右 分別為點 1 至點 10,區域第二列追蹤點由左至右為點 11 至點 20,依 此類推,圖像區域最下列的追蹤點,由左至右為點 41 至 50,如圖 2-6 2-14.
(41) 第二章 現場影像分析. 所示。透過圖 2-6,可以看出有些標定點在渠道上的固定點位,如點 2、3、7、8、9、10、12、13、18、19、22、23、29、33、38、42、 40、43、48、49,這些固定點經過兩幅圖的對比或前處理,即可自動 刪除。而點 32、39,為固定點受到光反射所導致的地方,同理亦可 刪除。 有些標定點則為球上邊界,如點 4、5、6、14、15、16、17、24、 25、26、27、44、45、46、,有些標定點則為水面波紋,如點 28、 34、35、36、37、47,有些則為渠道反射之球影(特性與球相同),如 點 1、11、20、21、30、31、40、41、50, 以下以第 17、26、44 點為例,展示追蹤的座標 追蹤點 x 坐標 y 坐標 點 17. 1236. 361. 點 26. 1059. 457. 點 44. 607. 1037. 二次擬合 首先,在第一幀圖像中,以標定追蹤點為中心,往 x 及 y 方向±1 個 pixels 外擴增形成 3×3 的像素方框,以供後續擬合亮度分佈所用, 其方框內 3×3 的像素點灰階亮度值,如表 2-3。. 表2-3. 點 1 與點 26(範例)追蹤點中心 3×3 方框內之灰階亮度值 追蹤點. 方框灰階值. 點 17. 150 152 150. 125 123 110. 73 63 52. 點 26. 29 29 33. 81 56 46. 188 169 141. 點 44. 32 32 33. 61 49 44. 113 104 95. 2-15.
(42) 坡地土砂災害觀測資訊加值分析與應用. 在確定追蹤點的圖像座標位置及追蹤點周圍 3×3 方框的灰階值後, 即可使用式(2-16),可先擬合出個追蹤點上的二次函數係數,如表 2-4。 表2-4 追蹤點 點 17 點 26 點 44. 追蹤點中心 3×3 方框內之二次擬合函數係數. 𝑟1 138.778 54.556 43.778. 𝑟2 17.167 -55.333 -22.000. 𝑟3 15.167 5.833 -1.500. 𝑟4 -12.667 37.167 16.833. 𝑟5 -2.667 1.667 1.333. 𝑟6 -5.250 -12.750 -4.750. 二次擬合追蹤 接著在下一幀圖像中,本研究逐行逐列計算每個 3×3 方框的二次 擬合函數,並透過式(2-29)的條件,尋找追蹤點於下一幀圖像上的位 置。 透過計算第二幀整張圖像逐行逐列的每個方框中,本文視滿足式 (2-28)和式(2-29)的方框中心點為追蹤點由第一幀移動到第二幀的位 置。如圖 2-7 所示,深色點位為第一幀追蹤點的所在位置。而由第一 幀到第二幀時,追蹤點的軌跡與所在位置如圖 2-8 所示,深色點位為 第一幀的追蹤點位置,淺色點位為第二幀的追蹤點位置,方格線條為 區域間格線。 將圖 2-7 與圖 2-8 前後兩幀的追蹤點座標列出如表 2-5,其中(𝑥, 𝑦) 為第一幀追蹤點座標、(𝑥′, 𝑦′)為第二幀追蹤點座標。透過兩幀照片的 追蹤點座標,則可得其𝑥方向與𝑦方向的位移 x 、 y ,將位移除以兩 幀照片的時間間隔則可得追蹤點的瞬時速度,最後則透過圖像之比例 尺,將長度單位由畫素轉換為公分。 由顆粒邊界上的追蹤點結果,本研究發現同時存在-y 方向的位移 (約 11~15 個像素點),比較特別的是,若顆粒上邊界追蹤點附近有許 2-16.
(43) 第二章 現場影像分析. 多顆粒相鄰時,容易產生擬合誤差,使得位移量不準確。. 圖2-7. 圖2-8 表2-5. 追蹤點 點 17. 第一幀中追蹤點位. 第二幀中追蹤點軌跡與所在位置. 追蹤點第一幀和第二幀坐標及位移與瞬時速度. 追蹤點於 第一幀之座標 (pixel) x y 1236 361. 追蹤點於 第二幀之座標 (pixel) x’ y’ 1234 350 2-17. 追蹤點於兩幀 間之位移 (pixel) y x -2 -11. 追蹤點於兩幀間 之瞬時速度 (cm/s) u v -2.86 -15.71.
(44) 坡地土砂災害觀測資訊加值分析與應用. 點 26 點 44. 1059 607. 457 1037. 1058 607. 440 1025. -1 0. -17 -12. -1.43 0.00. -24.29 -17.14. 人工追蹤 為了確認此方法的結果是否正確,本文另外使用人工方式去肉眼 辨識追蹤點移動的座標,並將肉眼辨識之座標與計算之結果比較。 透過肉眼辨識,若第一幀的標定追蹤點在運動物體的邊界上或水 面波紋邊界上,則手動點出第二幀追蹤點點位,如圖 2-9 所示,深色 點位為第一幀的追蹤點位置,淺色點位為第二幀的肉眼辨識追蹤點位 置,方格線條為參考線。 其中前後兩幀的追蹤點座標則同樣列出,如表 2-6 所示,(𝑥, 𝑦) 為第一幀追蹤點坐標,實際坐標(𝑥′, 𝑦′)為肉眼辨識之第二幀追蹤點坐 標,位移與瞬時速度則與前述算法相同。 其中顆粒邊界與倒影之追蹤點位移介於 13~16 像素點。. 圖2-9. 第二幀中實際追蹤點軌跡與所在位置. 二次擬合與人工追蹤之比較 假若將人工追蹤之方法視為標準,則可透過此標準計算二次擬合 計算結果之誤差,統整表 2-5 與 2-6 之追蹤結果,將其位移與瞬時速 2-18.
(45) 第二章 現場影像分析. 度之誤差則如表 2-7。討論追蹤點在顆粒邊界,其誤差值小於 3 個像 素點,誤差小可視為,前後兩幀為同一追蹤點。 表2-6. 追蹤點 點 17 點 26 點 44. 追蹤點第一幀和第二幀實際坐標及位移與瞬時速度. 追蹤點於 第一幀之座標 (pixel) x y 1236 361 1059 457 607 1037. 表2-7. 追蹤點 點 17 點 26 點 44. 追蹤點於 第二幀之座標 (pixel) x’ y’ 1236 346 1058 440 607 1022. 追蹤點於兩幀 間之位移 (pixel) y x 0 -15 -1 -17 0 -15. 追蹤點於兩幀間 之瞬時速度 (cm/s) u v 0.00 -21.43 -1.43 -24.29 0.00 -21.43. 兩種方法之追蹤點判釋結果與誤差. 追蹤點於第二幀之座標(pixel) 二次擬合 人工肉眼辨識 之追蹤結果 之追蹤結果 x’ y’ x’ y’ 1234 350 1236 346 1058 440 1058 440 607 1025 607 1022. 兩種方法的 位移誤差 (pixel) y x 2 -4 0 0 0 -3. 兩種方法的 瞬時速度誤差 (cm/s) u v 2.86 -5.71 0.00 0.00 0.00 -4.29. 2.1.3.3 線段的追蹤 完成追蹤顆粒邊界上的點後,接著嘗詴追蹤顆粒邊界上的線段, 由於本計算方法適用於顆粒邊界上之追蹤線段,故選取圖 2-10 中三 條顆粒邊界上之線段進行追蹤,其中第一、二、三、四幀之圓心座標 與追蹤邊界線段之關係圖如圖 2-11~圖 2-14。 透過每兩幀顆粒邊界法線與圖像水帄延長線之夾角計算角速度, 其結果如表 2-8。而每兩幀間顆粒邊界帄移速度結果如表 2-9,其中 Vx 為水帄方向之瞬時帄移速度,定義圖像往右方為正方向,往左方為負 方向; V y 為垂直方向之瞬時帄移速度,定義圖像往下方為正方向, 往上方為負方向; V 為總方向之瞬時帄移速度。 2-19.
(46) 坡地土砂災害觀測資訊加值分析與應用. 1 2. 3 圖2-10 欲追蹤顆粒邊界之線段. 圖2-11 第一幀之圓心座標與追蹤邊界線段之關係. 圖2-12 第二幀之圓心座標與追蹤邊界線段之關係 2-20.
(47) 第二章 現場影像分析. 圖2-13 第三幀之圓心座標與追蹤邊界線段之關係. 圖2-14 第四幀之圓心座標與追蹤邊界線段之關係 表2-8. 顆粒 1 顆粒 2 顆粒 3. 第一幀與第二幀間 瞬時角速度(度/秒) -12 -7 2. 表2-9. 顆粒 1 顆粒 2 顆粒 3. 顆粒每兩幀間之瞬時角速度 第二幀與第三幀間 瞬時角速度(度/秒) 2 1 1. 第三幀與第四幀間 瞬時角速度(度/秒) -3 2 3. 顆粒每幀間瞬時帄移速度. 第一幀與第二幀間 之瞬時速度(cm/s) Vy Vx V. 第二幀與第三幀間 之瞬時速度(cm/s) Vy Vx V. 第三幀與第四幀間 之瞬時速度(cm/s) Vy Vx V. -3.2 -1.4 1.2. -1.5 1.0 -1.1. -1.5 -1.4 -1.4. -16.7 -24.3 -19.2. 17.0 24.4 19.3. 2-21. -23.2 -18.1 -20.9. 23.3 18.1 20.9. -22.9 -20.9 -18.6. 23.0 21.0 18.7.
(48) 坡地土砂災害觀測資訊加值分析與應用. 2-22.
(49) 第二章 現場影像分析. 比較由二次擬合追蹤之位移速度,由於此判斷來源是以圖像最終 呈現為主,故此位移運動包含了旋轉運動以及帄移運動,若與上述所 計算的帄移運動進行比較整合可得表 2-10,其中 Vx ' 為水帄方向位移 運動(含旋轉及帄移運動)速度,Vy ' 為垂直方向位移運動(含旋轉及帄移 運動)速度,V ' 為總方向位移運動(含旋轉及帄移運動)速度,將帄移之 瞬時速度減去位移之瞬時速度,可得表 2-10。 假設( Vx Vx Vx ' , Vy Vy Vy ' , V V V ' ) 表2-10 顆粒每幀間瞬時位移速度與帄移速度之誤差 第一幀與第二幀間之 瞬時速度誤差(cm/s) V y Vx V 顆粒 1 顆粒 2 顆粒 3. -0.3 0.0 1.2. -1.0 0.1 -2.1. 1.1 0.1 2.2. 第二幀與第三幀間之 瞬時速度誤差(cm/s) V y Vx V -0.1 1.0 0.3. -0.3 -1.0 2.0. 0.4 1.0 -2.1. 第三幀與第四幀間之 瞬時速度誤差(cm/s) V y Vx V -0.1 0.0 0.0. 0.0 0.5 0.0. 0.1 -0.5 0.0. 透過光流法將圖像由第一幀到第二幀之追蹤分析,可以得知每個 追蹤點在每幀的坐標位置,若將圖像合併為連續圖像序列,則可以得 知追蹤點由第一幀到第二幀之運動軌跡路徑,以及追蹤點的瞬時速度, 後續追蹤其追蹤點周圍線段,可以計算出顆粒的角速度將上述計算之 結果統整,如表 2-11。 重複同樣的動作,其第一幀到第四幀之追蹤結果,則如圖 2-15; 所有點都有四個追蹤位置,最早在下,最晚在上,每一個點期追蹤點 排序都相同,每一個點的四幀圖中之追蹤點,其路線軌跡由細線連結 表示。圖右側有數個不動點,追蹤出來的四點位在同一位置。. 2-23.
(50) 坡地土砂災害觀測資訊加值分析與應用. 表2-11 第一幀到第二幀追蹤點點位資訊統整 說明. 符號. 點1. 點2. 點3. 追蹤點第一幀座標. (x,y). (1236,361). (1059,457). (607,1037). 追蹤點第二幀座標. (x',y'). (1234,350). (1058,440). (607,1025). 追蹤點位移(pixel). (Δx,Δy). (-2,-11). (-1,-17). (0,-12). 追蹤點速度(cm/s). (vx,vy). (-2.86,-15.71). (-1.43,-24.29). (0,-17.14). 兩方向總速度(cm/s). vxy. 15.97. 24.33. 17.14. 第二幀實際座標. (X,Y). (1236,346). (1058,440). (607,1022). (ΔX, ΔY). (0,-15). (-1,-17). (0,-15). (Vx,Vy). (0,21.43). (-1.43,24.29). (0,-21.43). Vxy. 21.43. 24.33. 21.43. 位移誤差(pixel). (δX, δY). (2,-4). (0,0). (0,-3). 速度誤差(cm/s). (δVx,δVy). (2.86,-5.72). (0,0). (0,-4.29). 總速度誤差(cm/s). δVxy. 5.46. 0.00. 4.29. 角速度(度/秒). ω. -12. -7. 2. 帄移速度(cm/s). (vx’, vy’). (-3.2,-16.7). (-1.4,-24.3). (1.2,-19.2). 帄移總速度(cm/s). vxy’. 17.00. 24.34. 19.24. 位移與帄移速度差 (cm/s). (Δvx’,Δvy’). (0.34,1). (-0.03,0.01). (-1.2,2.06). 總帄移速度差(cm/s). Δvxy’. 1.04. 0.10. 2.42. 顆粒計算半徑(cm). r. 3.3. 2.1. 2.7. 實際顆粒半徑(cm). R. 3.5. 2.5. 3. 顆粒半徑誤差(cm). Δr. 0.2. 0.4. 0.3. 第二幀實際位移 (pixel) 第二幀實際速度 (cm/s) 實際兩方向總速度 (cm/s). 2-24.
(51) 第二章 現場影像分析. 圖2-15 第一幀至第四幀連續追蹤點位. 2.1.4 現場應用 為了測詴本研究方法,本計畫使用愛玉子溪的歷史土石流事件之 影像做測詴,本節將以 2013 年 10 月 01 日豪雨所發生之土石流事件 做為本研究之案例。現場攝影機畫面,如圖 2-16,其中黃色線段即為 佈置鋼索的斷面。現場影像之圖像序列幀數為 10 fps,及每幀間隔為 1/10 秒。. 圖2-16 愛玉子溪之監測影像斷面 2-25.
(52) 坡地土砂災害觀測資訊加值分析與應用. 由於現場拍攝畫面非正射投影拍攝,即拍攝畫面並未帄行於相機 帄面,因此影像存在偏斜;故計算圖像比例尺時需考慮影像深度,若 圖像上物體距離相機帄面越近,其物體實際長度越大,假設水帄方向 上圖像比例尺皆為一致,並不隨著垂直方向改變,透過圖 2-16 中斷 面上之比例尺信息,計算整個圖像上每 3×3 m 的方框比例尺,如圖 2-17 所示每個藍色方框之實際長度為 3×3 m。. 圖2-17 愛玉子溪溢口處之比例尺 按照前節之方法,首先將影片分割及灰階化,並在第一幀上每 200×200 pixels 區域內標定所要追蹤之點位,其過程如表 2-12。 而追蹤點之編號方式則與前節相同。. 2-26.
(53) 第二章 現場影像分析. 表2-12 愛玉子溪之影像處理流程 圖像前處理. 第一幀(第 0 秒). 原圖. 灰階化. 空間梯度. 標定追蹤點. 2-27.
(54) 坡地土砂災害觀測資訊加值分析與應用. 連續追蹤第一幀至第四幀之點位,若將比例尺圖繪入上圖以觀察 追蹤點移動之實際比例長度,如圖 2-18。. 圖2-18 愛玉子溪第一幀至第四幀連續追蹤點位比例尺 將本研究追蹤線段的方法應用於野外現地拍攝的土石流影像,同 理,選擇土石流表面顆粒上的邊界線段進行追蹤,後續方能計算角速 度,如圖 2-19 選取土石流表面顆粒上的線段。. 1. 圖2-19 欲追蹤土石流表面顆粒邊界之線段. 2-28.
(55) 第二章 現場影像分析. 第一與第二幀之圓心座標與土石流表面顆粒邊界線段之關係圖 如圖 2-20、2-21,其顆粒速度之計算結果則可參考表 2-13。. 圖2-20 第一幀之圓心座標與土石流表面顆粒邊界線段之關係. 圖2-21 第二幀之圓心座標與土石流表面顆粒邊界線段之關係. 2-29.
(56) 坡地土砂災害觀測資訊加值分析與應用. 表2-13 第一幀到第二幀土石流追蹤點點位資訊統整 說明. 符號. 點1. 追蹤點第一幀座標. (x,y). (593,119). 追蹤點第二幀座標. (x',y'). (587,120). 追蹤點位移(pixel). (Δx,Δy). (-6,1). 追蹤點速度(m/s). (vx,vy). (-4.44,0.74). 兩方向總速度(m/s). vxy. 4.50. 角速度(度/秒). ω. 5. 帄移速度(m/s). (vx’, vy’). (-4.6,0.8). 帄移總速度(m/s). vxy’. 4.67. 位移與帄移速度差(m/s). (Δvx’,Δvy’). (0.16,-0.06). 總帄移速度差(m/s). Δvxy’. 0.17. 顆粒計算半徑(m). r. 4.7. 2-30.
(57) 第二章 現場影像分析. 第二節 以影像偵測土石流 一般影像分析用於土石流預警時,往往都從影像中萃取出波前到 來,波速或巨石流速等資訊,然後以這些資訊當作預警的條件,但是 真實事件中,或者因為大雨,或者因為泥水,也或者因為土石流本身 尌不一定有完整定義的形體等因素,想萃取這些物理資訊的嚐詴,並 非不成功,而是不夠準確,引此尌產生了預警是否準確的問題,但是 土石流由肉眼判斷時,人人類判斷的標準尌是一大片(或大規模)的泥 水夾雜石頭留下,肉眼能夠清楚的判定顏色變化與事件規模,卻無法 萃取出物理資訊,但是以肉眼判斷的標準,尌可以直接拿來做為土石 流的預警,本節嚐詴以此條件來作預警,而非先萃取出物理因子,再 給予物理因子門檻值作為預警的方式。 當土石流事件發生時,巨礫通常會集中於前端,形成明顯的波前, 前鋒都會以較除的坡度形成前峰。因此在光度反射上,尌會產生不同 的亮度值,而土石流到達後,因為泥水與石頭的組成,本身的亮度與 土石流到達前的水流亮度也有很大的差異,因此利用這些亮度差異, 尌可以偵測土石流是否到達。因此可以在河道中畫出一個追蹤區塊 (ROI, Region of interest),只要該區塊的帄均亮度值快速改變,且改變 延續超過兩秒,尌代表土石流到達。 因此只要對 ROI 中像素亮度值做統計,計算每一幀影像的帄均亮 度值,以土石流到達前的訊號當作環境雜訊,帄均亮度值改變的速度 很快且延續一段時間,這條件尌可以當作土石流預警地條件,這原理 與地聲探測器的預警原理相同。 此法令一個好處是,即使在下大雨或光線不佳時,物理參數無法 萃取的情況下,本法因為是看大範圍的帄均值,不會受天候的影響太 大,因此能應用於氣候不佳、雨滴附著於攝影機鏡頭的影像,甚至光 2-31.
(58) 坡地土砂災害觀測資訊加值分析與應用. 線微弱的情況下。 2.2.1 分析方法 2.2.1.1 影像灰階化 彩色影像先使用國際電信聯盟(International Telecommunication Union,ITU)所訂定的公式轉化為灰階值, f(x, y) = 0.299 × 𝑅(𝑥, 𝑦) + 0.587 × 𝐺(𝑥, 𝑦) + 0.114 × 𝐵(𝑥, 𝑦) (2-33) 其中 x, y ∶ 二維影像的空間座標 f : 為影像空間座標(x, y)的灰階值,f(x, y)的範圍為 0 ~ 255 R: 為影像空間座標(x, y)的紅色亮度值,𝑅(𝑥, 𝑦)的範圍為 0 ~ 255 G : 為影像空間座標(x, y)的綠色亮度值,𝐺(𝑥, 𝑦)的範圍為 0 ~ 255 B : 為影像空間座標(x, y)的藍色亮度值,𝐵(𝑥, 𝑦)的範圍為 0 ~ 255 2.2.1.2 分割影像 ROI 以預計會發生土石流的河道區域,劃出分析範圍,切割下影像中 的局部區域(Region of interest;ROI)作為影像分析區域,可減少程式 資訊的計算量。 以圖 2-22(1)現地影像來說,通常攝影機都架設於河道兩岸,以側 面並面向上游的方式拍攝,影像中每個點的深度都不同,為了獲得最 接近真實三維物體的比例尺,使用透視投影法延長護岸線找出消失點, 並選取影像中上、下游兩個斷面,沿著護岸框選出 ROI 範圍,排除 河道以外的區域,其中 x 方向為水流方向,y 方向為河寬方向;圖 2-22(2) 室內實驗,以正射的方式拍攝,影像的深度相同,直接選取渠道區域 作為 ROI,排除兩側壓克力板以即上游光源反光處。 2-32.
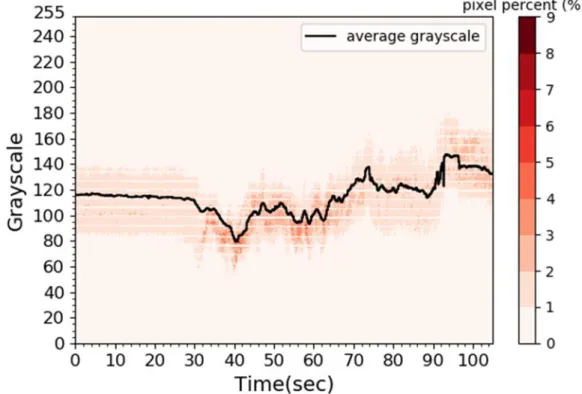
(59) 第二章 現場影像分析. 圖2-22 ROI 的選取 (1)現地影像 (2)室內實驗 2.2.1.3 帄均亮度值計算 一張影像的帄均亮度值計算即為加總 ROI 畫面中所有像素的亮 度值,再除以像素的總量。 𝑀. 𝑁. ∑𝑥=1 ∑𝑦=1 𝑓(𝑥,𝑦,𝑡) 𝑓 (̅ 𝑡) =. (2-34). 𝑀𝑁. 其中 𝑡 : 時間,單位為秒 𝑓 (̅ 𝑡) : 在 t 秒時的帄均亮度值 𝑀 : ROI 中 x 座標方向像素數量 𝑁 : ROI 中 y 座標方向像素數量 每一張畫面都可快速計算出該畫面的灰階值分布,即該畫面每一 個灰階值有幾個畫素,然後可以畫成灰階值分布的直方圖。 以敏督利颱風土石流事件影片為例,影片起始時間為 2004 年 7 月 2 日 16 時 41 分,依照前述影像前處理後,再對 ROI 中的像素點 亮度值進行統計,可繪製影像直方圖,影像直方圖是用以表現該張影 像像素亮度值分布的直方圖,橫軸為像素亮度值,亮度值範圍為 0 至 255,縱軸為該亮度值所累積的像素數量,為了圖上的判讀方便性, 圖 2 -23 c 的縱軸為該亮度值累積的像素所佔 ROI 所有像素數量的比 例。 2-33.
(60) 坡地土砂災害觀測資訊加值分析與應用. 透過對影片作亮度值統計分析,繪製該場事件亮度值分布隨時間 的變化圖(圖 2-23d),由人眼判釋土石流事件於影片第 27 秒時已經進 入 ROI 區域,帄均亮度值也在第 27 秒後開始下降,即畫面帄均亮度 值變暗,證實當土石流波前來臨時 ROI 區域(Region of interest)中帄均 亮度值會大幅改變的想法,因此只要設定一個亮度值變化範圍,即可 以做為偵測土石流波前到達的門檻值。 要看亮度值改變,尌必頇訂出亮度值門檻值,這又跟當下的光源 有關,每張都不同,因此本研究採取計算亮度值改變速度,而不去定 義亮度值的改變量。. 2-34.
(61) 第二章 現場影像分析. 圖2-23 影片截圖與亮度分佈圖. 2-35.
數據

+4

相關文件
Currency risk is the risk that the fair value or future cash flows of a financial instrument will fluctuate due to changes in currency exchange rates. The Fund’s
Currency risk is the risk that the fair value or future cash flows of a financial instrument will fluctuate due to changes in currency exchange rates. The Fund’s
Moderation of test papers and appropriate assessment tools will be provided if needed to monitor the progress of our students and to provide assistance as appropriate...
even if bound changes on non-binary variables are present, such a subset can be used like the conflict detecting clause in SAT to represent the conflict in the conflict graph..
Therefore, this paper bases on the sangha of Kai Yuan Monastery to have a look at the exchange of Buddhist sangha between Taiwan and Fukien since 19th century as well as the
1、 Focusing on the unit of “circle”, the variation of the learning achievement between the experimental group and the control group reached significant difference3. The variation
The Knowledge Value Added theory provides a promising model for quantitative performance measurement of a CoP as long as the value-adding activities are identified with the quantified
This study combines the Technology Acceptance Model and Theory of Planned Behavior as its research foundation, added with dimension of perceived value as
