Volume16, No.1,March 2011, pp.23-44
1國立中央大學土木工程學系碩士 收到日期:民國 100 年 03 月 30 日
2國立中央大學太空及遙測研究中心 教授 修改日期:民國 100 年 07 月 06 日
*通訊作者,電話: 886-3-4227151 ext.57622, E-mail: [email protected] 接受日期:民國 100 年 07 月 18 日
衛星雷達影像反投影定位與有理函數模式
施學延
1陳良健
2*摘 要
合成孔徑雷達影像使用微波獲取地表的資訊,因此具有全天候觀測和日夜皆可觀測的能力。為了提 升雷達影像的應用,使校正過後的影像和其他地理資訊圖層的套合,並強化雷達影像在地理資訊系統的 應用,雷達影像的幾何校正是必須的。傳統校正雷達衛星影像的做法是利用控制點,將雷達衛星軌道進 行多項式平差。從直接地理對位的觀點出發,本文提出使用雷達影像反投影的方式進行雷達影像的校正,
及簡化雷達影像的校正過程,並分析本研究方法的成效。由於有理函數模式標準化的處理流程,使得有 理函數模式在光學影像上已經廣泛的使用,本研究也進行雷達影像有理函數模式的分析。
本研究的主要工作分成雷達影像反投影和雷達影像有理函數模式兩個部份。雷達影像反投影的工作 項目分成建立雷達影像反投影程序、線性轉換、最小二配置和成果驗證。而雷達影像有理函數模式的工 作項目分成建立有理函數模式、精化有理函數模式、最小二乘配置以及成果驗證。驗證部份測試不同的 衛星資料並比較本研究提出的方法和PCI Geomatica Toutin 模式進行成果的比較。成果顯示本研究提出的 方法與PCI Geomatica Toutin 模式相近或更佳。
關鍵詞:雷達影像反投影、雷達有理函數模式、雷達幾何校正
1. 前言
1.1 研究動機與目的
因應感測器多元化發展趨勢,多元資料整合與 應用成為遙測相關領域中重要的研究方向。地理資 訊系統(Geographic Information Systems, GIS)可結 合遙測影像與不同的圖層資料進行分析和處理。因 為衛星影像可快速取得大範圍資料,在地理資訊系 統佔有相當重要的地位。由於衛星成像時,地表起 伏以及衛星姿態參數的影響,使得衛星影像有高差 位移、傾斜位移等幾何偏差,無法直接和地理系統 的其它圖層進行精確套合及分析,因此影像校正為 衛星資料和地理資訊系統整合的必須處理技術。
衛載遙測資料主要包含兩大類,分別為光學影 像與雷達影像,其中,前者為被動式感測器接收地 表輻射,獲取地表光譜資訊;後者則為主動式感測
器,藉收發雷達波計算地表與載體之幾何距離,產 生目標區之幾何資訊。上述兩種感測器其成像原理 與影像特性有相當大的差異,光學影像物空間和像 空間之投影關係為角度投影,其幾何處理是以共線 條件式建立物空間與像空間的投影轉換關係,具有 較佳的光譜資訊、空間解析度與明確的成像幾何特 性,易於辨識。但資料品質受限於觀測氣候,如天 候不佳則不利於地表影像的取得。另一方面,衛載 雷達影像與物空間之投影關係為距離投影,幾何處 理是利用距離方程式與都卜勒方程式來建立物空 間與像空間的轉換關係(Gelautz et al., 1998),衛載 雷達影像的成像機制使得其方位解析力(Azimuth resolution) 與雷達側視角餘弦值成反比,側視角越 大 方 位 解 析 力 越 差 。 合 成 孔 徑 雷 達(Synthetic Aperture Radar,SAR)改善方位解析力,使其與天 線尺寸成正比。此外,雷達影像不受天候環境限制,
致使雷達影像有別光學影像的應用價值,為光學影
像無法取代。因此為了強化雷達影像在地理資訊系 統上的應用,幾何校正為雷達影像應用的關鍵要 素。
衛載光學影像幾何處理方式大致可分為,嚴密 幾何模式(Rigorous Sensor Model, RSM)和有理函 數模式(Ration Function Model, RFM)兩大(Toutin, 2004),嚴密幾何模式又可細分為光束法(Bundle Adjustment)(Westin, 1990) 及 直 接 地 理 定 位 法 (Direct Georeferencing)(Chen and Chang, 1998)。此 兩者在方位參數的求解過程中有些許的差異,但都 是以共線條件式為基礎的嚴密處理,由於嚴密幾何 模式具物理意義,使用此方式可得到高精度的成果,
因此廣泛應用於光學衛星影像幾何改正(Toutin et
al., 2002)。衛載光學影像的有理函數模式使用兩個
多項式的比值建立物空間與像空間的轉換關係 (Fraser et al., 2002; Tao and Hu, 2002; Mayumi, etal., 2004),計算時並不涉及衛星動態取樣之複雜形
式,所以此標準化的數學形式較嚴密幾何模式簡易。有理函數模式中使用兩個多項式的比值建立物空 間和像空間的轉換關係,OGC(2000)制定了有理函 數轉換係數(Rational Polynomial Coefficient, RPC) 標準格式,使得有理函數模式有標準化處理程序,
因此相較於傳統的嚴密幾何模式的處理手法較簡 潔。對衛載光學影像而言,由於高解析衛星的視角 (Field of View, FOV)都很小,且衛星的定位系統及 姿態系統有很高的相對精度,因此使用衛星星曆資 料產生有理函數轉換係數後,配合地面控制點進行 幾何處理可得到與嚴密幾何模式近似的成果(Chen
et al., 2006) ,除此之外,處理模式標準化,可免
除不同衛星資料處理之差異,有理函數模式已廣泛 使用於光學高解析衛星資料處理。衛載雷達影像在過去研究中常用的幾何校正 方式為多項式法,以距離方程式與都卜勒(Doppler) 方程式建立物空間和像空間的轉換關係,針對多項 式的各個項次進行調整,多項式法具有簡單和適用 性較廣的優點,但是在地表起伏劇烈的地方,多項 式法無法有良好的成(黃國滿 等,2004)。PCI 中 Toutin(2003) 的 3-D CCRS (Canada Centre of Remote Sensing) 模式對雷達影像進行處理,但是
處理程序較為複雜。有理函數模式具有標準化的處 理程序,過去多應用於衛載光學影像上,在雷達影 像上有部份的研究(張過、李德仁,2007),針對地 面網格數量和有理函數階數分析有理函數的模式 誤差,建議地面虛擬網格使用 20
20,高程分三 層即可以使有理函數模式的求解達到穩定,張過 等(2008)使用有理函數模式進行雷達影像的正射 化校正,過去研究對於有理函數模式像空間和真實 像空間的連接關係分析並不完備,且對於使用雷達 影像的反投影模式,轉換衛星外方位參數也沒有完 整的分析。根據過去有理函數模式在衛載光學影像和雷 達影像上的經驗,簡化過去衛載雷達影像的校正程 序。因此,本研究首先建立雷達影像反投影校正並 進行分析,爾後提出衛載雷達影像的有理函數模式,
有別於傳統衛載雷達影像的處理程序。
1.2 研究方法及內容
傳統上雷達影像幾何校正方法為使用地面控 制點對衛星軌道的姿態參數進行平差。依據光學影 像有理函數模式的經驗,有理函數模式標準化處理 流程具有簡化嚴密幾何模式處理程序,且可達到和 嚴密幾何模式相當的精度。本研究分成兩個部份:
雷達影像反投影定位和雷達影像有理函數模式。首 先建立雷達影像反投影定位,分析成果然後進行衛 載雷達影像的有理函數模式,及分析其可行性。
雷達影像反投影定位的研究流程如圖 1 影像 反投影工作流程,各分成四個步驟:(1)從直接地 理對位的觀點出發,進行雷達影像反投影幾何的建 立;(2)使用線性轉換對反投影影像進行系統誤差 的補償;(3)最小二乘配置(Mikhail and Bethel, 1982) 補償局部性的系統誤差;(4)成果驗證。
雷達影像有理函數模式工作流程如下圖 2 所 示,分為四個步驟:(1)根據第一部份建立的反投 影幾何和地面虛擬網格求解有理函數係數;(2)使 用有理函數係數和地面點座標完成物空間和像空 間的轉換;(3)使用線性轉將有理函數像空間和真 實影像空間進行連結(Grodecki et al, 2003);(4)最小
二乘配置消除局部的系統誤差;(5)成果驗證。本 實驗成果分成兩個部份:為反投影校正成果和有理 函數模式成果。
圖1 反投影研究流程圖
圖2 有理函數模式研究流程圖
2. 雷達影像反投影幾何建立
雷達影像成像為距離投影,影像幾何特性與角 度投影之光學影像差異甚大。因此對雷達影像幾何 校正數學模式和光學有所不同,在過去雷達影像常 用的校正方式是多項式法,使用一個多項式描述衛 星軌道在太空中的時變性,調整軌道參數達到雷達 影像的校正。多項式法校正需修正載具本身的外方
位參數,對於局部系統誤差的校正較難掌握。現今 衛星的全球定位系統(Global Position System, GPS)、
慣性導航系統(Inertial Navigation System, INS)以及 恆星追蹤儀(Star Track)精度的提升,保留了衛星載 具完整的軌道資訊 (張紋綺, 2009)。因此,本章從 光學衛星直接地理對位的概念出發,建立雷達衛星 的反投影幾何,並以雷達衛星的反投影幾何為基礎 進行後續有理函數模式的研究。本章工作分為四個 部份:(1)反投影幾何的建立,從直接地理對位觀 點出發建立反投影的成像幾何;(2)針對反投影的 影像坐標使用線性轉換消除系統誤差;(3)最小二 乘配置補償局部性系統誤差;(4)成果驗證。以下 各節將詳細說明各個部份工作:
2.1 反投影幾何建立
根據直接地理的對位的觀點,建立雷達成像幾 何模式,首先建立空間中直線方程式的關係,如圖 3 空間中直線方程式示意圖,(X,Y,Z)表示橢球直角 坐標系統,虛線為衛星軌道,
P
為地心到衛星描 述衛星在太空中位置的向量,G
為地心到地面點 的向量,
R
為衛星到地面點斜距的向量,此三個 向量的數學關係式如式1,式 2 為雷達測距方程式 (Range Equation) 和圖 3 的關係,V
為衛星當時切 線方向的速度向量,雷達的反投影成像幾何還須配 上都卜勒方程式(Doppler Equation)數學式如式 3 所 示。
圖3 空間中直線方程式示意圖 地面座標
星歷資料
線性轉換 獨立檢核點
成果驗證 最小二乘配置 反投影幾何建立
影像反投影 地面虛擬網
有理函數係數 地面座標
有理函數模式
精化有理函數模式
成果驗證 最小二乘配置
X
Y Z
P G
R
V
P G R
(1)P G R
(2)dt R f
dd
2
(3)其中
f
d:都卜勒頻率;
:波長;t
:時間。完成空間中直線方程式關係的建立,接著需對 星歷資料進行處理,以及反投影轉換模式的建置,
以下分為二節:軌道描述、反投影轉換,各個描述 處理的方法。
2.1.1 軌道描述
二階多項式常用來描述衛星軌道在太空中的 時變性,數學形式如式4 所示。由於雷達影像和線 列式成像衛星相同每一條掃描線中心會隨時間變 化,因此根據衛星資料提供的星歷資料另外常用的 替代方式是Lagrange’s Interpolation 如式 5 所示,
得到衛星載具在太空中任一時刻的位置和速度。
3 2 2 1
3 2 2 1
3 2 2 1
c t c t c Z
b t b t b Y
a t a t a X
(4)
其中 X ,,Y Z:衛星在太空中的位置;a1~ c3: 二階多項式係數;
t
:時間。
n
i i
n i j
j i j
j n
i i
n i j
j i j
j
t t V t
t t t
V
t t P t
t t t
P
0 0, 0 0,
)]
( ) [(
) (
)]
( ) [(
) (
(5)
其中
P
:衛星的位置;V
:衛星的速度;n: 資料數目;
t
:時間。2.1.2 反投影轉換模式
完成軌道描述和空間中直線方程式關係的建 立後,即可建立反投影轉換模式,圖4 為反投影模 式示意圖, 為範圍內上地面一點和衛星位置 構成的斜距向量,依據雷達成像原理在成像時斜距
向量 和衛星的速度向量 所構成的夾角稱 為都卜勒角理論上為九十度,即是斜距向量和速度 向量彼此正交,因此兩向量內積為零,數學關係式 如式6。從物理上的意義來看此式即為都卜勒方程 式(3)的改寫,對於地面成像點都卜勒頻率為零,
此兩向量的夾角關係決定成一個函數
f (t )
。感測 器本身的瑕疵或是載具飛行時的震動會產生一偏 斜角,成像時的都卜勒角不為九十度,在過去的校 正中將此偏斜角視為一常數進行補償,此偏斜角對 都卜勒角產生的影響視為線性,因此本研究使用線 性轉換補償此偏斜角的影響。0 ) ( ) ( )
( t R t V t
f
(6) 本研究使用牛頓迭代法計算此非線性函數(6),
計算成像時
f ( t ) 0
時所對應的成像時間 ,迭代 關係如下式7:2 ]
) ( ) [ (
) ( )
( ) (
1
t
t t f t t f
t t f
t f
t t f t
n n
n n
n n n n
(7)
其中
t
:為每條掃描線的時間;n:為迭代次 數。圖4 反投影模式示意圖
當求解出成像時間
t
時,即可以決定像平面的 坐標,像平面坐標可以分為平行飛行方向以及垂直 飛行方向,平行飛行方向的像坐標如式8:line
o numb
t t Line t
(8)t
)斜距 (t R
衛星軌道
地表
衛星飛行速度 )
(t
V
其中 t:成像時間;t0:影像第一條掃描線的時 間;
t:取樣時間間距;numbline:影像上掃描 線數目。另外,垂直飛行方向的像坐標,則是利用該點 的斜距進行計算。雷達影像屬於距離投影,影像上 每一點都記錄了該點和載具的距離,因此利用斜距 計算像元和該掃描線上第一點的距離,來進行垂直 飛行方向的像坐標預估,其關係如圖3 計算影像坐 標示意圖,數學式如下式9 所示,
圖5 計算影像坐標示意圖
sample
Sawth numb
sample Gn
(9)其中 Gn:該點和該掃描線上第一個像元點的距 離;Swath:掃描帶寬;numbsample:每一條掃描 線的像元數。
根據本研究使用資料的不同,成像點和該掃描 線上第一個像元點的距離有兩種不同的計算方法。
像是ERS-1 和 ERS-2 這類衛星提供地距斜距轉換 係數(Ground range to slant range coefficient),如果 已知地面一點和該掃描線上第一個像元點在影像 上的距離,透過此轉換式求得該點的斜距數學形式,
如式10 所示。如果有一斜距也可以使用此式反推 算地面點和該掃描線上第一個像元點的距離。
另外一種衛星資料如ALOS/PALSAR,並沒有 提供此轉換係數,因此使用一簡單的幾何關係也可 推算出該成像點和該掃描線上第一個像元點的地 面距離,如圖6 地距斜距幾何關係圖所示,計算近 斜距和成像點斜距所夾的圓心角和地球半徑則可 以推算出,該成像點和該掃描線上第一個像元的距 離。
3 3 2 2 1
0
C Gn C Gn C Gn C
S
n
(10) 其中 Sn:斜距;C0~ C3:地距斜距轉換係數;Gn:該點和該掃描線上第一個像元點的地面距 離。
圖6 地距斜距幾何關係圖
2.2 線性轉換
地面點經過反投影後,可能存在系統誤差,從 光學影像的觀點,小視場角的光學影像反投影後和 原來的影像間存在的系統誤差為線性關係,在雷達 影像中,近斜距和遠斜距的夾角相當於光學的小視 場角的特性,因此在本研究嘗試使用線性的函數中 的仿射轉換來補償反投影影像的系統誤差,數學形 式如式 11,在影像上挑選部分控制點進行仿射轉 換參數的求解,作為反投影影像的系統誤差校正參 數。
f ey dx Y
c by ax X
(11)其中
X , Y
:原始影像坐標;x,y:反投影影像 坐標;a , d , c , d , e , f
:仿射轉換參數。2.3 最小二乘配置
經過線性轉換後完成系統誤差的補償,在局部 地區可能存在局部性的系統誤差,因此使用最小二 乘配置對局部性的系統誤差進行補償,根據最小二 乘的原理以參考點,推算任意點上的內插值。在此
Swath
)
遠斜距(t
R
近斜距
Gn
近斜距 R
(t )
假設影像上的兩個軸向獨立不相關,以兩個一維的 最小二乘配置修正影像坐標,並以求解線性轉換係 數的控制點為參考點。最小二乘配置的數學式如 12 所示。
k k k
k
[ ]
1v
(12) 其中k:影像中line 或 sample 方向;
k:k 方向 上的修正量;
k:待求點和參考點在k 方向上的 協變方;
k:參考點間在k 方向上的協變方;vk:參考點在k 方向上的殘差。
最小二乘配置當中,參考點的殘差在線性轉換 的過程中可以求得,而待求點的殘差在本研究中使 用斜變方函數組成協變方矩陣,採用一個遞減的高 斯函數進行給定,如圖7 最小二乘配置使用的協變 方函數,數學形式如13 所示。
圖 7 最小二乘配置所使用的協變方函數(張智 安,2002)
其中 Rn:雜訊變方與觀測量變方的比值;k:
k 方向的殘差變方;
G:權重;d
,d
max:點位間 的距離與最大距離 (單位:像元)。本研究Rn= 0.1,表示在殘差量中,有 10%的 雜訊。G決定遞減的高斯函數曲線之形狀。G參 數越大,表示高斯函數會遞減越快。研究中使用G
= 2.146,當 d=dmax時,協變函數的值為
0.01 (1
Rn)
k,如圖7 所示。d 代表點位間的 距離,距離越近的點位,相關性越高。dmax代表 點位間的最大距離,通常為影像斜對角距離。2.4 成果驗證
反投影成果的驗證,使用檢核點進行成果的驗 證,先選取一些地面點,這些地面點是先在校正過 後的精度在1 個像元內的 SPOT 影像和未校正的雷 達影像上選取相同的點。,經過反投影計算這些點 在影像上的坐標,取其中一部份做為控制點進行線 性轉換參數的計算,控制點計算出的轉換參數進行 系統誤差的校正,另一部份的點作為獨立檢核點使 用。最小二乘配置針對局部地區的系統誤差進行補 償,得到最後的地面點反投影的影像坐標,與已知 的檢核點影像坐標比較,計算方均根誤差(Root Mean Square Error, RMSE)評估坐標誤差。
3. 有理函數模式
有理函數模式在現今光學影像校正發展日漸 重要,將衛星的外方位參數轉換成為八十個有理函 數係數,描述衛星的物空間和像空間的轉換關係,
再以控制點進行坐標的套合,有理函數模式不牽涉 衛星複雜的動態取樣因此具有應用標準化以及單 純化且可以達到和嚴密幾何模式相當的精度,有理 函數模式在光學衛星影像上研究已有相當成熟的 基礎,且已經被廣泛應用,雷達影像有理函數模式 的研究目前並不常見。
有理函數模式在光學影像上應用條件有二:視 場角(Field of view, FOV)小(Chen et al., 2006),以及 衛星的方位參數近似值佳。雷達影像和光學影像兩 種不同成像原理影像,在成像幾何上有些相似的特 性:光學影像的小視場角的特性,綜觀衛載雷達影 像,在觀測時的近斜距(Near Slant-range)以及遠斜 距(Far Slant-range)的夾角即相當於光學衛星中的 視場角也具有小角度的特性,具有相似的幾何條件。
因此有理函數模式在雷達影像上具有應用的可能 性,本研究將探討有理函數模式在雷達影像上的可 行性。
本章工作分為四個部份:(1)有理函數模式包 含有理函數係數的求解,依據光學影像的經驗,從 嚴密幾何的模式推算有理函數係數,完成物空間和
2
max
( )
(1 ) 0
var
0
G d d
n k
k
R e if d
Co iance
if d
,
, (13)
像空間轉換的描述,使用有理函數係數和兩個多項 式的比值,進行物空間和像空間坐標的轉換。(2) 精化有理函數模式,完成物空間和像空間關係轉換 的坐標,因為衛星方位具有誤差,因此需進行有理 函數模式的精化。(3)最小二乘配置,使用最小二 乘配置補償局部性的系統誤差。(4)成果驗證。
3.1 有理函數模式
有理函數模式使用兩個多項式的比值描述物 空間和像空間的轉換關係,數學模式如下式 14,
其中P
、
L、
H:正規化地理坐標( , , h
)的物空 間坐標;S 、RFM LRFM:正規化有理函數模式影像 坐標。( , , ) ( , , ) ( , , ) ( , , )
s RFM
s l RFM
l
Num P L H S Den P L H Num P L H L Den P L H
(14)
scale Line
offset Line l L
scale Sample
offset Sample s S
scale height
offset height H h
scale long
offset L long
scale lat
offset P lat
RFM rfm
RFM rfm
_ _ _
_ _
_ _
_ _
_
(15)
offset height offset long offset
lat
_ , _ , _ :地面坐標系 統在三個方向上的平移量。scale height scale long scale
lat
_ , _ , _ :地面坐標系 統在三個方向上的尺度量。offset Line offset
Sample_ , _ :影像坐標在兩個方向
上的平移量。
scale Line scale
Sample_ , _ :影像坐標在兩個方向
上的尺度量。
rfm rfm l
s , :正規化影像坐標。
光學影像,部份衛星公司會提供有理轉換係數,
可以直接使用有理函數模式,部份衛星公司則沒有 提供,若擬用有理函數模式,就必須由使用者自行
求解有理函數係數。本研究使用的雷達衛星資料目 前尚未有公司提供有理函數係數,必須自行求解。
一般而言,有理函數係數的求解方法有兩種,第一 種為使用地面控制點進行求解,第二種為使用地面 虛擬控制點,間接將衛星的方位參數轉換成有理函 數係數。在第一種方法中,有理函數模式常使用三 階多項式,因此求解有理函數係數最少需要使用四 十個地面控制點,如果考慮自由度和轉換的係數的 精度,則控制點的數量、品質以及空間上的分布都 需要考慮,因此使用地面控制點求解有理函數係數 的做法,可行性較低。
較佳的方法是使用衛星外方位參數,轉換得有 理函數係數。在影像範圍內的地面物空間中,產生 平面和高程等間距的虛擬網格,如圖8 地面虛擬網 格示意圖,再將虛擬地面網格點使用反投影,計算 所有虛擬網格的影像坐標,因此便可以得到所有地 面虛擬網格對應的影像點,則可計算有理函數係數。
使用此方式所得的有理函數係數的誤差,反映方位 轉換的模式誤差,不具有控制點的隨機誤差。一般 衛星公司的有理函數係數也是由此種方法求得。
圖8 地面虛擬網格點示意圖(Chen et al., 2006) 有理函數係數計算時為了避免多項式的分母 為零,造成數值求解發散的問題,因此分母的兩個 常數項可以經由分子分母同除一個數使得常數項 為一,因此求解的係數由原來的八十個係數減少為 七十八個。此外為了求解的穩定,求解時輸入的地 面坐標和影像坐標會正規化到-1 和+1 之間。
本研究參考 Tao 和 Hu(2001)使用最小二乘的 迭代過程進行有理函數係數的求解,由於有理函數 模式由多項式相除所組成的非線性方程式,因此在 進行最小二乘求解有理函數係數時,使用泰勒展開
式先行線性化進行最小二乘的迭代求解。使用虛擬 網格將衛星外方位間接轉換成有理函數係數計算 時,因為有理函數係數間的相依性,造成法方程式 奇異,在最小二乘的迭代求定過程中易造成發散,
尤其使用二次以上的有理函數模式時較常發生 (Tao and Hu, 2001)。因此 Tao 和 Hu(2001)建議在最 小二乘的迭代運算過程中,對法方程式乘上一個微
小值
h 的平方乘上單位矩陣,使得法方程式的特徵
值範圍介於h2和原本特徵值加上h2之間,改善此 法方程式的運算條件仍然保留原本的特徵值,進行 法方程式規則化調整。因此本研究根據 Tao 和 Hu(2001)的建議,在有理函數係數最小二乘的迭代 運算過程中加入一個微小值的單位矩陣改善法方 程式的運算條件。下圖9 測試加入的微小值對於虛 擬檢核點的影響,從0.00008 到 0.008 測試出來的 結果模式誤差小於 像元。
圖9 規則化常數影響
有理函數係數求解的流程可以統整如下圖10 有理 函數係數求定流程圖。
圖 10 有理函數係數求定流程圖
有理函數係數的求定完成後,對於影像範圍內 的任一點的物空間和像空間有了完整的轉換關係,
整個有理函數模式流程如下圖11 有理函數模式流 程圖。經過有理函數係數轉的影像坐標,由於衛星
的外方位有誤差亦有誤差,因此有理函數模式需要 進行精化,以下將詳述精化有理函數模式的方法。
圖11 有理函數模式流程圖
3.2 精化有理函數模式
由衛星外方位求得的有理函數係數,因為衛星 的外方位本身帶有誤差,產生的有理函數轉換係數 也帶有誤差,因此需要對有理函數模式進行精化,
得到物空間和像空間的精確對位關係。在光學影像 中,由於現今衛星的飛行姿態相對穩定,且具備小 視場角的特性,造成的誤差通常為線性,因此由衛 星外方位求得的有理函數係數產生的誤差也可假 設為線性。在雷達衛星影像中也具備飛行姿態穩定,
以及類似光學影像的小視場角特性,因此假設誤差 為線性。本研究使用坐標轉換的方法,補償有理函 數模式影像空間的偏移量,進行有理函數模式精化。
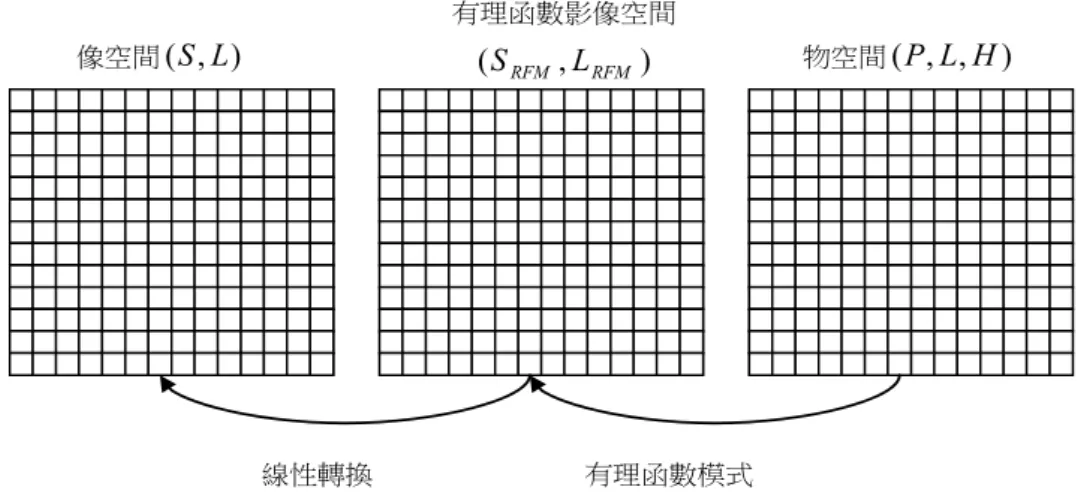
有理函數模式的坐標轉換關係,如圖12 有理函數 模式的坐標轉換關係所示,經過正規化的地面點,
經由有理函數係數轉換到有理函數像空間,接著使 用線性轉換將有理函數像空間轉到真實影像空間。
研究中,也測試部分非線性的轉換方式進行不同精 化方式成果的比較。
3.3 最小二乘配置
精化過後的有理函數模式,可能仍然存在局部 性的系統誤差因此使用最小二乘配置補償局部性 的系統誤差。本研究假設影像上的兩個軸向獨立不 相關,因此使用兩個一維的最小二乘配置進行局部 性系統誤差的補償。詳細過程如2.3 節,本節不再 贅述。
虛擬檢核點
0 0.05 0.1 0.15 0.2
0.00 000
0.00 008
0.0 0010
0.00 030
0.00 050
0.00 070
0.00090 0.00
200 0.00
400 0.00600
0.00 800
0.01 000 微小常數
RMSE
虛擬檢核點
地面虛擬網格
影像反投影
反投影影像正規化
正規化反投影影像 有理函數係數求解
有理函數係數 虛擬網格地面坐標正規化
有理函數模式
正規化物空間坐標 有理函數係數
精化有理函數模式
圖12 有理函數模式的坐標轉換關係
3.4 成果驗證
成果驗證的部份分成有理函數係數的檢核,和 有理函數模式成果的檢核。使用虛擬地面網格一部 份產生有理函數係數,另一部份計算方均根誤差,
檢驗有理函數係數的模式誤差。
有理函數模式成果的檢核,使用檢核點進行精 度的檢核。首先在影像範圍內,選取一些已知這些 點的物空間坐標和像空間坐標得參考點,一部份的 參考點用於理函數模式後線性轉換係數的求解,另 一部份的點當作檢核點,經過有理函數模式和線性 轉換後和已知的坐標點為計算方均根誤差,評估坐 標誤差。
4. 實驗成果與分析
本研究提出反投影和有理函數校正模式,針對 雷達影像提出幾何改正模式並將成果和商業軟體 PCI Geomatica 中的 Toutin 模式(PCI, 2006)的成果 進行比較和分析。Toutin 模式為 CCRS 和 PCI 共同 開發的校正模式。本研究針對三顆不同的衛星 ERS-1,ERS-2 和 ALOS/PALSAR,進行影像反投 影和有理函數模式校正的測試。下面將詳述各個測 試資料的特性、實驗內容以及實驗成果與分析。
4.1 實驗資料介紹
本研究針對三顆不同的衛星ERS-1,ERS-2 和
ALOS/PALSAR 進行影像反投影和有理函數模式 校正的測試並和Geomatica PCI 的 Toutin 模式進行 成果比較,測試資料如下表所示1 所示。
4.2 實驗內容
本研究提出雷達影像反投影定位技術和雷達 影像有理函數模式。影像反投影實驗的內容針對二 階多項式和Lagrange’s Interpolation 分析下列三個 實驗內容:(1)建立雷達影像反投影成像幾何,進 行影像反投影,對反投影影像進行成果分析。(2) 反投影影像經由線性轉換進行系統誤差的消除,針 對使用不同的線性轉換方式進行成果分析。(3)使 用最小二乘配置對局部性系統誤差進行補償後成 果分析。有理函數模式的部份包含兩個實驗內容:
(1)有理函數係數精度檢驗。(2)使用不同的坐標轉 換精化有理函數模式之成果分析。實驗成果種類如 表2 所示,影像反投影根據不同的軌道描述方式進 行三種實驗成果的分析。有理函數模式則進行有理 函數係數的精度檢驗,檢驗有理函數模式的模式誤 差。
4.3 實驗成果與分析
本研究使用三個不同的雷達衛星包含:ERS-1、
ERS-2 和 ALOS/PALSAR。進行雷達影像反投影校 正和雷達影像有理函數模式的成果比較。
像空間(
S
,L
)有理函數影像空間
) ,
(SRFM LRFM 物空間(P,L,H)
有理函數模式 線性轉換
4.3.1 測試例一
測試例一中使用的是ERS-1,反投影影像坐標 誤差如表3 所示,包含兩種軌道描述方式反投影成 果、線性轉換校正成果以及最小二乘配置補償成果。
表 4 針對 ERS-1 衛星提供的地距和斜距轉換係數
係數計算Sample 和使用 ALOS 計算 Sample 方向 時所使用的幾何方式進行Sample 方向的誤差比較。
表5 顯示不同控制點數對線性轉換之影響。有理函 數係數精度和有理函數模式結果如表6 所示。表 7 使用相同的控制點和檢核點數中比較影像反投影、
有理函數模式和Toutin 模式的成果。
表 1 測試影像資料
ERS-1 ERS-2 ALOS/PALSAR
測試影像
影像拍攝時間 1993/10/25 2006/3/30 2007/2/14 影像大小 7945
34996 7983
31408 12300
9600測試區域 台灣西半部 台灣西半部 台灣中部
地面總點數 42 43 30
檢核點數 32 33 23
地面解析度 30 公尺 30 公尺 10 公尺 表 2 實驗成果種類
實驗內容
影像反投影 軌道描述方式 實驗成果
二階多項式 影像反投影 線性轉換 最小二乘配置 Lagrange
Sample 處理方式比較(ERS-1 和 ERS-2)
有理函數模式 有理函數係數精度檢驗 精化有理函數模式
成果比較 本研究方法和Geomatica PCI Toutin 模式 表3 測試例一:反投影影像坐標誤差
軌道描述形式 二階多項式 Lagrange
Sample Line Sample Line 反投影 6.52 39.13 5.68 17.05 反投影+線性轉換 3.91 0.84 1.31 1.32
反投影+線性轉換+最小二乘配置 3.70 0.85 1.22 1.34 單位:像元(pixel)
表4 測試例一:Sample 方向處理方式比較 地距斜距轉換係數 幾何特性
Sample Line Sample Line
1.31 1.32 1.28 1.30 單位:像元(pixel) 表5 測試例一:反投影影像線性轉換控制點數量和誤差關係
控制點數量 Sample Line
4 1.35 1.29
5 1.36 1.29
6 1.36 1.31
7 1.42 1.31
8 1.36 1.27
9 1.34 1.29
10 1.31 1.32 單位:像元(pixel) 表 6 測試例一:有理函數係數精度和有理函數模式結果
有理函數係數精度
虛擬網格數 虛擬控制點數 虛擬檢核點數 Sample Line
4000 1851 1850 0.0102 0.00558
有理函數模式
精化方式 控制點數量 Sample Line
仿射轉換 10 1.37 1.01
四參數轉換 10 1.30 1.01
八參數轉換 10 1.28 0.87
二階多項式 10 1.43 1.07
仿射轉換和最小二乘配置 10 1.22 1.00 單位:像元(pixel) 表 7 測試例一:影像反投影、有理函數模式、Toutin 模式成果比較
Sample Line
影像反投影 1.31 1.32 有理函數模式 1.37 1.01
Toutin 模式 1.24 1.11 單位:像元(pixel)
(1) 反投影影像坐標誤差
比 較 使 用 二 階 多 項 式 和 Lagrange’s Interpolation 兩種軌道描述形式對於反投影成果的 影響,表 3 二階多項式的成果的誤差向量圖如圖 13,Lagrange’s Interpolation 的成果誤差向量圖如圖 14,文中誤差向量圖中紅色三角形皆表示計算轉換
參數所使用的控制點,藍色圓圈表示獨立檢核點,
誤差向量圖中總共有10 個轉換參數控制點,和 32 個獨立檢核點。由表 3 的成果來看 Lagrange’s Interpolation 對於軌道描述具有較好的成果,二階 多項式在軌道密合時會造成反投影時在Sample 方 向上的拉扯,由於控制點的拉扯行為使得最小二乘
配置在此對於局部性系統誤差的貢獻有限。
(2) Sample 方向處理方式比較
ERS-1 衛星提供地距和斜距轉換係數本研究 使用此係數關係式推算地距和斜距的關係,以驗證 進 行 影 像 反 投 影 Sample 值 的 計 算 , 但 是 ALOS/PALSAR 沒有提供此轉換係數只能利用幾 何關係進行推算,在此針對 ERS-1 衛星進行兩種 不同處理方法對於 Sample 的影響。如表 4,成果 誤差向量圖如圖15,由誤差向量圖 15 和表 4 結果,
兩種不同的處理方式對於誤差的影響量並不顯著。
由此可知 ERS 衛星提供的地距和斜距轉換係數,
為雷達影像 sample 方向和斜距關係的幾何關係的 近似過程。
(3) 線性轉換控制點數量和誤差關係
此處比較線性轉換中使用控制點數對成果的 影響。從圖16 可以看出控制點數量由 4 個逐漸增 加到10 個所得出的解都是相當穩定的,由此可知 少量的控制點即可使反投影的成果達到穩定。
(4) 有理函數係數精度和有理函數模式結果
有理函數係數的精度檢驗將地面虛擬網格點 一半作為有理函數係數的求解,另一半作為模式轉 換的檢核,由表6 有理函數係數精度檢驗部份可知 將雷達影像外方位轉換成有理函數係數上的模式 誤差是相當小。本研究分別使用四種不同的坐標轉 換方式,分別為仿射轉換、四參數轉換、八參數轉 換以及二次式轉換對有理函數模式進行精化,以及 使用最小二乘配置補償區域性系統誤差。表6 的成 果,四種精化方式的表現近似,各個有理函數模式 精化誤差向量圖如圖17 所示,仿射轉換後最小二 乘配置補償有些微的幫助。(5) 影像反投影、有理函數模式、Toutin 模式成果
比較最後比較影像反投影、有理函數模式 Toutin 模式的成果。表7 三種校正方式的誤差向量圖如圖 18。表 7 的結果顯示,影像反投影和有理函數模式 可以達到和Toutin 模式近似的結果。
(a)反投影成果 (b)線性轉換成果 (c)最小二乘配置成果 圖13 測試例一:二階多項式成果的誤差向量圖
(a)反投影成果 (b)線性轉換成果 (c)最小二乘配置成果 圖14 測試例一:Lagrange’s Interpolation 成果誤差向量圖
(a)地距斜距轉換 (b)幾何模式 圖15 測試例一:Sample 方向處理方法誤差向量圖
圖16 測試例一:線性轉換控制點數量和誤差關係
(a)仿射轉換 (b)四參數轉換 (c)八參數轉換 (d)二階多 項式
(e)仿射和最小二 乘配置 圖17 測試例一:有理函數模式精化誤差向量圖
(a)影像反投影 (b)有理函數模式 (c) Toutin 模式
1.15 1.20 1.25 1.30 1.35 1.40 1.45
4 5 6 7 8 9 10
控制點數量
RMSE Sample
Line
圖18 測試例一:三種校正誤差向量圖
4.3.2 測試例二
測試例二中使用由四個像幅組成台灣西半部 地區的 ERS-2 影像,表 8 所示為測試兩種軌道描 述方式反投影成果、使用線性轉換校正系統誤差這 裡使用10 個控制點以及使用最小二乘配置進行局 部性系統誤差的補償的成果。表9 為 sample 方向 使用 ERS-2 衛星提供的斜距和地距轉換係數和使 用幾何模式的成果比較。表10 為反投影影像線性 轉換控制點數量和誤差關係的穩定度測試這裡測 試。有理函數係數精度檢驗和有理函數模式結果如 表11 所示並比較不同坐標轉換精化有理函數模式。
表12 中比較本研究提出的影像反投影和有理函數 模式以及Toutin 模式的成果。
(1) 反投影影像坐標誤差
兩種軌道描述形式二階多項式和 Lagrange’s Interpolation 對於反投影成果的影響,表 8 二階多 項 式 的 成 果 的 誤 差 向 量 圖 如 圖 19 ,Lagrange’s Interpolation 的成果誤差向量圖如圖 20,誤差向量 圖中總共有10 個轉換參數控制點,和 33 個獨立檢 核點。二階多項式中由於局部性系統誤差並不顯著,
最小二乘配置在此的貢獻相當有限。
(2) Sample 方向處理方法比較
ERS-2 和 ERS-1 衛星一樣提供地距和斜距轉 換係數,本研究使用此係數關係式推算斜距和地距
的關係,ALOS/PALSAR 沒有提供此轉換係數,只 能利用幾何關係進行推算,在此針對 ERS-2 衛星 進行兩種不同處理的比較成果,如表9,誤差向量 圖如圖21,由誤差向量圖 21 和表 9 結果,兩種不 同的處理方式對於誤差的影響量並不顯著。
(3) 反投影影像線性轉換控制點數量和誤差關係
將表10 的控制點和誤差的關係繪製成下圖 22 的關係圖,可以看出大約使用四個控制點即可達到 良好的校正效果。(4) 有理函數係數精度和有理函數模式結果
由表11 中有理函數係數精度檢驗的部份,首 先檢驗由外方位參數轉換成的有理函數係數的模 式誤差,再進行有理函數模式的精化,檢驗有理函 數模式的成果。比較五種不同精化方式的誤差向量 圖如圖23 所示,對此測試例使用仿射轉換、八參 數轉換和二階多項式三種精化方式的成果近似,四 參數在此的表現較差。仿射轉換精化後使用最小二 乘配置補償區域性系統誤差,效果不顯著。(5) 影像反投影、有理函數模式、Toutin 模式成果
比較比較本研究提出方法和Toutin 模式的成果,如 表12 三種校正方式的誤差向量圖如圖 24。結果顯 示本研究提出的影像反投影和有理函數模式可以 達到和Toutin 模式近似的結果。
表8 測試例二:反投影影像坐標誤差 軌道描述形式 二階多項式 Lagrange
Sample Line Sample Line 反投影 9.39 14.06 9.56 15.29 反投影+線性轉換 1.55 1.42 1.59 2.33
反投影+線性轉換+最小二乘配置 1.75 1.42 1.66 1.90 單位:像元(pixel) 表9 測試例二:Sample 方向處理方法比較
地距斜距轉換係數 幾何特性
Sample Line Sample Line
1.59 2.33 1.64 2.20 單位:像元(pixel)
表10 測試例二:反線性轉換控制點數量和誤差關係 控制點數量 Sample Line
4 1.64 2.29
5 1.61 2.08
6 2.15 2.11
7 1.63 1.78
8 1.69 1.78
9 1.65 1.67
10 1.59 2.33 單位:像元(pixel) 表 11 測試例二:有理函數係數精度和有理函數模式結果
有理函數係數精度
虛擬網格數 虛擬控制點數 虛擬檢核點數 Sample Line
4000 1665 1678 0.0172 0.0182
有理函數模式
精化方式 控制點數量 Sample Line
仿射轉換 10 1.67 1.28
四參數轉換 10 7.64 2.18
八參數轉換 10 1.68 1.29
二階多項式 10 1.43 1.38
仿射轉換和最小二配置 10 1.80 1.36 單位:像元(pixel) 表12 測試例二:影像反投影、有理函數模式、Toutin 模式成果比較
Sample Line
影像反投影 1.59 1.90 有理函數模式 1.66 1.32
Toutin 模式 1.53 1.32 單位:像元(pixel)
(a)反投影成果 (b)線性轉換成果 (c)最小二乘配置成果 圖19 測試例二:二階多項式成果的誤差向量圖
(a)反投影成果 (b)線性轉換成果 (c)最小二乘配置成果 圖20 測試例二:Lagrange’s Interpolation 成果的誤差向量圖
(a)地距斜距轉換 (b)幾何模式 圖21 測試例二:Sample 方向處理方法誤差向量圖
圖22 測試例二:線性轉換控制點數量和誤差關係
(a)仿射轉換 (b)四參數轉換 (c)八參數轉換 (d)二階多項式 (e)仿射和最小二乘配置 圖23 測試例二:有理函數模式精化誤差向量圖
0.00 0.50 1.00 1.50 2.00 2.50
4 5 6 7 8 9 10
控制點數量
RMSE Sample
Line
(a)影像反投影 (b)有理函數模式 (c) Toutin 模式 圖24 測試例二:三種校正誤差向量圖
4.3.3 測試例三
測試例三中使用的是 ALOS/PALSAR 影像。
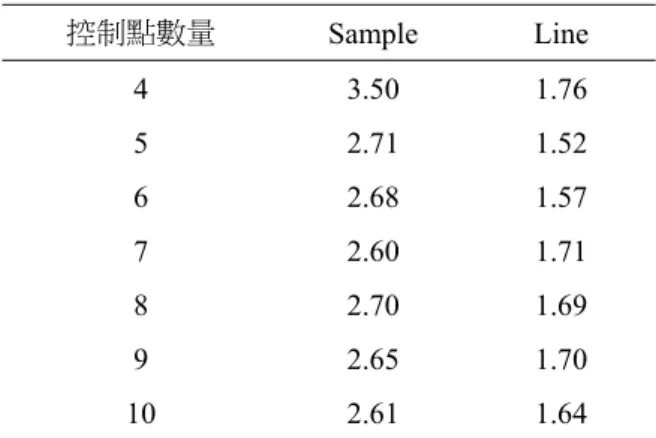
影像反投影的實驗部分包含兩種軌道描述方式比 較,以及線性轉換控制點數量之影響。有理函數模 式的部份則是包含兩個測試,一個是有理函數係數 模式誤差的檢驗,以及不同坐標轉換精化有理函數 模式的成果比較。最後則是比較本研究方法以及 Toutin 模式成果。表 13 所示為測試兩種軌道描述 方式反投影成果。表14 為測試反投影影像線性轉 換控制點數量和誤差關係的穩定度。表15 是有理 函數係數精度檢驗和有理函數模式結果,並比較不 同坐標轉換精化有理函數模式的成果。表16 中比 較本研究提出的影像反投影和有理函數模式和 Toutin 模式的成果。
(1) 反投影影像坐標誤差
圖25 和 26 是使用二種軌道描述的誤差向量圖,
誤差向量圖中總共有10 個轉換參數控制點,和 20 個獨立檢核點。由成果來看使用兩種不同的軌道描 述方式對於最後成果沒有顯著的差異,而最小二乘 配置對於局部性系統誤差的補償成果在此並不顯 著。
(2) 線性轉換控制點數量和誤差關係
將表14 的控制點和誤差的關係繪製成圖 27,
此測試例中大約使用五個控制點計算線性轉換係 數即可達到良好的校正效果。
(3) 有理函數係數精度和有理函數模式結果
由表15 中顯示有理函數係數精度,和不同坐 標轉換方法精化有理函數模式的成果。有理函數係 數精度的部份反應了由將外方位參數間接轉換成 有理函數係數是可行的。有理函數模式四種精化方 式的誤差向量圖如圖28 所示,對此測試例使用仿 射轉換和八參數轉換的精度近似,二次式和四參數 轉換的成果較差,仿射轉換精化後使用最小二乘配 置的成效不顯著。(4) 影像反投影、有理函數模式、Toutin 模式成果
比較此測試例最後比較本研究提出的雷達影像反 投影和有理函數模式,跟 Toutin 模式的成果。表 16 三種成果的誤差向量圖如圖 29,從表 16 的結果 可以看出本研究提出的影像反投影和有理函數模 式可以達到近似的成果,跟Toutin 模式的比較本研 究提出的方法也有比較好的表現。
表13 測試例三:反投影影像坐標誤差
軌道描述形式 二階多項式 Lagrange
Sample Line Sample Line
反投影 14.03 369.4 8.06 103.76 反投影+線性轉換 2.59 1.66 2.60 1.63
反投影+線性轉換+最小二乘配置 2.69 2.01 2.74 1.99 單位:像元(pixel)
表14 測試例三:反投影影像線性轉換控制點數量和誤差關係 控制點數量 Sample Line
4 3.50 1.76
5 2.71 1.52
6 2.68 1.57
7 2.60 1.71
8 2.70 1.69
9 2.65 1.70
10 2.61 1.64 單位:像元(pixel)
表15 測試例三:有理函數係數精度和有理函數模式結果 有理函數係數精度
虛擬網格數 虛擬控制點數 虛擬檢核點數 Sample Line
4000 1804 1793 0.0043 0.0065
有理函數模式
精化方式 控制點數量 Sample Line
仿射轉換 10 2.61 1.64
四參數轉換 10 23.76 24.59
八參數轉換 10 2.75 1.69
二階多項式 10 2.50 3.33
仿射轉換和最小二乘配置 10 2.92 2.04 單位:像元(pixel)
表16 測試例三:影像反投影、有理函數模式、Toutin 模式
Sample Line
影像反投影 2.74 1.99 有理函數模式 2.61 1.64
Toutin 模式 3.59 4.01 單位:像元(pixel)
(a)反投影成果 (b)線性轉換成果 (c)最小二乘配置成果 圖25 測試例三:二階多項式成果的誤差向量
(a)反投影成果 (b)線性轉換成果 (c)最小二乘配置成果 圖26 測試例三:Lagrange’s Interpolation 成果的誤差向量圖
圖27 測試例三:線性轉換控制點數量和誤差關係
(a)仿射轉換 (b)四參數轉換 (c)八參數轉換
(d)二階多項式 (e)仿射轉換和最小二乘配置 圖28 測試例三:有理函數模式精化誤差向量圖
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 4.00
4 5 6 7 8 9 10
控制點數
RMSE Sample
Line
(a)影像反投影 (b)有理函數模式 (c) Toutin 模式 圖29 測試例三:三種校正誤差向量圖
4.4 實驗總結
實驗成果分為兩個部份:雷達影像反投影和雷 達有理函數模式。影像反投影的成果顯示,雷達影 像反投影後使用仿射轉換和少量的控制點即可以 達到良好的校正成果。Lagrange’s Interpolation 對 於軌道資料有比較好的描述。ERS 衛星中的地距和 斜距轉換式為幾何原理的近似解,比較使用兩種不 同方式的成果近似。實驗中使用最小二乘配置用來 消除區域性的系統誤差,在大部份的測試例中成果 有限,在 ERS-2 中有比較好的表現,顯示最小二 乘配置仍然有一定的貢獻。
雷達影像的有理函數模式成果顯示,將雷達衛 星外方位參數轉換成有理函數係數具有可行性。實 驗測試不同精化有理函數模式的坐標轉換方式中,
仿射轉換具有簡潔的數學式,在同樣的控制點仿射 轉換具有和其他方式近似或是更佳的精度。使用最 小二乘配置補償有理函數模式的區域性系統誤差,
在 ERS-1 的例子中有幫助,其餘的兩個測試例並 沒有顯著幫助,可見最小二乘配置在此並無顯著的 幫助。
最後比較本研究提出的雷達影像反投影定位、
雷達有理函數模式以及 Toutin 模式的成果,本研 究提出的方法和 Toutin 模式有近似或是更好的表 現。
5. 結論與建議
本研究提出雷達影像反投影和有理函數模式,
針對雷達影像進行幾何校正。實驗內容包含三個實 驗測試:第一個測試影像反投影的校正成果。第二 個測試有理函數模式在雷達影像上的測試成果。第 三個測試本研究提出的雷達影像反投影和有理函 數模式,和Toutin 模式的成果進行分析。測試影像 包 含 歐 洲 的 ERS-1 和 ERS-2 衛 星 與 日 本 的 ALOS/PALSAR 多種感測器衛星影像。茲就測試成 果提出以下結論:
1. 由於雷達衛星影像的近斜距和遠斜距間小夾角 的特性,近似光學衛星小視場角的特性。因此,
本研究提出的雷達影像反投影和有理函數模式 具有可行性。
2. 雷達影像有理函數模式具有標準化的處理流程,
且可以達到和嚴密幾何近似的精度。
3. 本研究嘗試使用最小二乘配置對於使用二階多 項式和Lagrange’s Interpolation 兩種不同軌道描 述方式,對反投影時產生的區域性系統誤差進 行補償,不過由於參考點誤差沒有明顯的區域 系統性,使得最小二乘配置的成果在此沒有顯 著的改善。
4. 雷達有理函數係數精度反應將衛星外方位參數 轉換成有理函數係數的模式誤差。
根據實驗結果及實驗過程中發現,研究過程中 可加強和改善的部份。茲建議如下:
縱觀雷達影像和光學影像,取雷達影像的正交
軌道成為一個模擬的光學影像,相當於轉換原本距 離投影轉換成角度投影,觀察其特性或許為雷達有 理函數模式的可行性提供另一方向的說明。
多元感測器的整合為現今遙測發展的另一重 點,光學影像和雷達影像的整合可以結合兩種影像 的優點。在雷達衛星和光學衛星影像方位參數接近 的情況下,如ALOS PALSAR 和 PRISM,雷達影 像提供距離,光學衛星提供角度,對於地面點三維 定位提供另一種可能性。但多數光學衛星和雷達衛 星的方位參數相差甚大,因此整合兩種資料時使用 有理函數模式可以不牽涉衛星動態取樣,可以提供 整合的便利性。
參考文獻
黃國滿、郭建坤、趙爭、肖洲、仇春平、呂京國,
2004,SAR 影像多項式校正方法與實驗,測繪 科學,第二十九卷,第六期,第27-30 頁。
張過、李德仁,2007,衛星遙感影像 RPC 參數求 解算法研究,中國圖像圖形學報,第十二卷,
第十二期,第2080-2088 頁。
張過、李德仁、秦緒文、祝小勇,2008,基餘 RPC 模型的高分變率 SAR 影像正射校正,遙測學 報,第十二卷,第六期,第942-948 頁。
張智安,2002,“EROSA 衛星影像幾何改正之研究”,
碩士論文,國立中央大學土木工程研究所。
張紋綺,2009,“整合式光學衛星影像區域平差”,
碩士論文,國立中央大學土木工程研究所。
Chen, L.C., and Chang, L.Y., 1998. Three dimensional positioning using SPOT stereostrips with sparse control, Journal of Surveying
Engineering, ASCE, 124(2):63-72.
Chen, L.C., T.A. Teo, and Liu, C.L. 2006. The Geometrical Comparisons of RSM and RFM for FORMOSAT-2 Satellite Images,
Photogrammetric Engineering & Remote Sensing, 69(1):59-68
Fraser, C. S., Hanley, H. B. and Yamakawa, T., 2002.
Three-dimensional geopositioning accuracy of Ikonos imagery, Photogrammetric Record, 17(99):465-479
Grodecki, J., and Dial, G., 2003. Block adjustment of high-resolution satellite image described by
rational funtion, Photogrammetric Engineering
& Remote Sensing, 69(1):59-68.
Gelautz, M., Frick, H., Raggam, J., Burgstaller, J., and Leberl, F., 1998. SAR Image Simulation and Analysis of Alpine Tettain, ISPRS Journal of
Photogrammetry & Remote Sensing, vol.53
pp.17-38.Mayumi, N., Fraser, C. S., Takayuki, N., Takahiro, and Shoichi, S. O., 2004. Accuracy assessment of QuickBird stereo imagery, Photogrammetric
Record, 19(106):128-137.
Mikhail, E.M., and Bethel, J.S., 2001. Introduction to modern photogrammetry, John wiley and Sons, New York, pp.446-454.
OGC, 2000. The Compendium of Controlled Extensions (CE) for the National Imagery Transmission Format (NITF), STDI- 0002, Version 2.1, November 16.
PCI, 2006. Manual of Orthoengine Software, v. 10.
Tao, C. V. and Hu, Y., 2001. A comprehensive study of the rational function model for photogrammetric processing, Photogrammetric
Engineering & Remote Sensing, 67(12): 1347–
1357.
Tao, C.V. and Hu, Y., 2002. 3D Reconstruction methods based on the rational function model,
Photogrammetric Engineering and Remote Sensing, 68(7): 705-714.
Toutin, T., Chenier, R. and Carbonneau, Y., 2002. 3D models for high resolution images: examples with QuickBird, IKONOS and EROS,
International Archives of Photogrammetry and Remote Sensing, 34(4): 547-551.
Toutin, T., 2003. Path Processing and Block Adjustment With RADARSAT-1 SAR Images,
IEEE Transactions On Geoscience And Remote Sensing, 41(10):2320-2328.
Toutin, T., 2004. Review article: geometric processing of remote sensing images: models algorithms and methods, International Journal of
Remote Sensing, 25(10): 1893-1924.
Westin, T., 1990. Precision rectification of SPOT imagery, Photogrammetric Engineering and
Remote Sensing, 56(2): 247-253.
1Master, Dept. of Civil Engineering, National Central University Received Date: Mar. 30, 2011 2 Professor, Center for Space and Remote Sensing Research, National Central University Revised Date: Jul. 06, 2011
*.Corresponding Author, Phone: 886-3-4227151 ext.57622 Accepted Date: Jul. 18, 2011 E-mail:[email protected]
Satellite SAR imagery for image back projection and RFM
Hsueh-Yen Shih
1Liang-Chien Chen
2*ABSTRACT
Synthetic Aperture Radars (SARs) take the advantages of all-weather and day-and-night capabilities to detect object information in microwave bands. In order to enhance the applications of SAR data, the geometric correction is a must. Thus, the generated ortho-image can be registered with other GIS data layers. The traditional methods for the rectification of SAR imagery adjust orbit polynomials according to ground control points. From direct georeferencing point of view, this paper investigates the feasibility of Radar back projection and analyzes the accuracy of proposed method to simplify the processing for SAR imagery rectification at first.
Owing to the implementation and standardization of Rational Function Model (RFM), it is widely used in the optical sensor adjusting. This research also investigates the feasibility of RFM for radar images positioning.
The major works includeradar back projection and RFM. The proposed scheme for radar back projection includes (1) establishing the Radar back projection procedure, (2) linear transformation, and (3) least squares collocation. In addition, the proposed scheme for RFM includes (1) establishment of RFM (2) refining, and (3) least squares collocation. The experiments test the images for different satellites and, then, compare the proposed method with the PCI Geomatica Toutin’s model. The proposed method can reach similar or ever better result than PCI Geomatica Toutin’s model.