國立臺灣大學電機資訊學院電信工程學研究所 博士論文
Graduate Institute of Communication Engineering College of Electrical Engineering & Computer Science
National Taiwan University Doctoral Dissertation
使用單埠量測結果重建多埠電路之散射矩陣 Multiport S-matrix Reconstruction Using One-Port
Measurements
林沿鍾 Lin Yen-Chung
指導教授:瞿大雄 博士 Advisor: Chu Tah-Hsiung, Ph.D.
中華民國 104 年 6 月
June, 2015
誌謝
從碩士誌謝到博士誌謝,要感謝的人和事多了好多。寫論文的時候,總覺得
一頁的空間好長,而寫誌謝時卻又突然變得好短。但願有緣讀到這篇誌謝的大家,
能稍微感受到在這受限的文字背後,滿滿的感懷之意。
首先感謝最大力付出的瞿大雄教授,無論是實驗發想、技術乃至於文案,皆
得力於老師的扶持才有今天的成果。而在學術之外,當我在生活上遇到難題時,
瞿教授也盡力地協助,讓我更能穩定腳步。感謝季先生長年細心維持實驗室的正
常運作,把精良的設備隨時保持在最佳狀態,讓我在截稿的關鍵時刻能專注於實
驗內容,完全不用擔心儀器出狀況。感謝李偉強學長,雖然你不在實驗室已許久,
但在理論發想初期及初次投稿論文時,你的鼓勵跟建議讓我安心不少。感謝張祐
宸同學在重要時刻提供的實務技術指導。另外特別感謝我的電磁學啟蒙老師蔡智
明教授,在虛度了廿年之後,我才終於在您的課堂上首次從『學』窺見了『思』
的輪廓。得知您即將出任口試委員,也在我們這群大學同儕間引起一陣小騷動。
而能在您的認可之下取得學位對我更是意義非凡。
感謝家鄉父親的資助,母親的支持。隨著接觸的事物越來越多,才能體會過
去你們所維繫的穩定環境,對於一個人的影響有多麼巨大。感謝你們給過的那些
日子,遠超過任何物質所能代表。並期許我們都能有足夠的智慧與勇氣,面對未
來的任何挑戰。感謝大姊一家包括小愷替我分擔的憂慮。當我正在與論文水深火
熱又面臨研發替代役的抉擇時,謝謝你們耐心地替我緩解心裡的不安。當然我也
不會忘記耘樂跟牧澄這兩顆小蘿蔔帶給大家的歡樂(!?),未來還請不要吝嗇地
放下身段,無下限地賣萌吧!感謝林士恆在我最支不開身的時候,一肩負起照顧
爸爸的責任。我一定要告訴你當我知道你要返回嘉義時,焦頭爛額的我是鬆了多
麼大的一口氣。感謝堅不可摧 364 聯盟的蘇聖琪,林昱廷以及最接近第一線看我
火燒屁股並且提供關鍵技術支援的黃品澄。感謝我的蘇曉芸,妳的一切決定都只
為了成就我的里程碑。只要是為了學業,對於我的任何提議一定是說一不二全力
配合,到了研究後期更是大量仰賴妳的資助。而當我的研究有了新的進展,妳就
靜靜地聽我興奮的轉述。除了老師之外,就只有妳看著我把理論一層層建築起來,
妳就是那位跟我併肩衝鋒的人。感謝蘇曉洳和蘇聖凱,謝謝你們過去十年來給了
我這麼特別的回憶,從五月天、皮克斯、新台灣原味、555、廈門、上海到龜山島,
無論到哪裡都留下了我們的足跡,大家合作把媽媽嚇到眼鏡噴發的那一天更是我
們慶生成就的顛峰!是你們三姊弟一起把笑聲倒進我的生活裡。最後,謹以無限
追思緬懷無緣見到此刻的長輩。我想我是少數能吃著岳母準備的便當做著研究的
幸運兒,雖然只差一點,妳就能看到這一切,但我相信妳一定很驕傲妳的女婿終
於順利完成了這個階段。願您在坎坷的一生之後能安息。謹將此微薄榮耀獻予您,
以及所有我深切在乎的大家。
i
摘要
本論文提出以多個單埠之散射參數量測,據以重建多埠被動及主動電路之散
射矩陣。降埠法係使用埠數少於 n 埠之網路分析儀,以獲得一 n 埠電路之散射矩
陣,已知適用降埠法之網路分析儀埠數,最少為雙埠或三埠,本論文則將埠數進
一步降至單埠,即最低埠數。
第二章闡述對一雙埠電路,如何使用輔助電路及單埠終端器,由多個單埠散
射參數,重建該雙埠電路之散射矩陣。其重建結果進一步應用於降埠法,由多個
單埠散射參數量測值,重建 n 埠電路之散射矩陣。由於使用單埠終端器,對於主
動電路可能造成振盪,因此本章亦敘述雙埠主動電路之散射矩陣重建方法。最後,
對於多埠互易電路,則提出可不使用降埠法,重建其 n 埠散射矩陣。
由於輔助電路在降低量測埠數至單埠極為重要,第三章則討論輔助電路之影
響,藉由適當選擇輔助電路,可降低單埠量測實驗數目,減低重建時數值運算之
困難,以及增加重建結果之準確性。
第四章則敘述四個實驗實例。包含三埠被動互易電路,三埠被動非互易電路
以及雙埠主動電路。重建結果與直接散射矩陣量測結果比較,顯示其一致性,重
建誤差亦予以討論。
關鍵字-多埠電路, 散射矩陣量測
ii
Abstract
In this dissertation, study results to reconstruct the scattering matrix (S-matrix) of a
multiport network from a set of one-port scattering parameter (S-parameter)
measurements are presented. Port reduction method (PRM) is a method to acquire the
S-matrix of an n-port network by using a reduced port vector network analyzer (VNA).
PRMs have shown that the minimum number of port of a VNA is two or three. This
study attempts to go one step further to reduce the number of port to be one, which is
the lowest number.
In Chapter 2, reconstruction method using auxiliary circuits and one-port
terminations to solve the S-matrix of a two-port network is described. The type-II PRM
is then applied to the results for the reconstruction of the S-matrix of an n-port network.
Since the terminations used in one-port measurement may cause an active network
oscillation. Further development on reconstructing a two-port active network is given.
Finally, the method in reconstructing the S-matrix of a multiport reciprocal network
without using PRM is also presented.
The use of auxiliary circuits plays an important role in reducing the number of
measured port to be one. The effects of the auxiliary circuits are discussed in Chapter 3.
By properly selecting the auxiliary circuit, one can reduce the number of one-port
iii
measurements, ease the problem encountered in the reconstruction, and increase the
accuracy of the reconstructed results.
Chapter 4 presents four experimental examples to verify the developed
reconstruction methods. They include a three-port reciprocal network, a passive
nonreciprocal network and a two-port active network. The reconstructed results are
compared with the directly measured S-matrices. They are shown in good agreement.
Errors of reconstructed results are also discussed.
keywords: Multiport network, scattering matrix measurement
iv
Contents
摘要
... iAbstract
... iiContents
... ivChapter 1 Introduction
... 11.1 Multiport network S-matrix measurement ... 1
1.2 Reconstruction methods ... 2
1.3 Port reduction methods ... 2
1.4 Motivation and contribution ... 3
1.5 Chapter outline ... 5
Chapter 2 Formulation
... 102.1 Two-port network ... 10
2.1.1 Diagonal elements ... 10
2.1.2 Off-diagonal elements... 12
2.2 Two-port active network ... 14
2.3 Reciprocal network using comparison process ... 16
v
2.3.1 Formulation ... 17
2.3.2 Three-port case ... 18
2.4 Summary ... 22
Chapter 3 Selection of auxiliary circuit
...26
3.1 Two-port network
...26
3.2 Two-port active network
...28
3.3 Two-port reciprocal network
...29
3.4 Summary
...31
Chapter 4 Experimental results
... 334.1 Three-port reciprocal network
...33
4.2 Three-port nonreciprocal network
...38
4.3 Two-port active network
...39
4.4 Three-port reciprocal network using comparison process
...41
4.5 Summary
...42
Chapter 5 Conclusion
... 71Appendices
... 73vi
Appendix A Prove of q p / = − ( S
12+ S
21)
...73 Appendix B Prove of r p / = S S
12 21 ...73
References
... 741
Chapter 1 Introduction
1.1 Multiport network scattering matrix measurement
The scattering matrix (S-matrix) of a multiport network can be acquired from the direct measurement using a full port vector network analyzer (VNA), or from multiple
measurements with the use of a reduced port VNA and proper reconstruction methods
[1]-[9]. The former is a straight forward approach. However, the necessary multiport
VNA is usually costly and requires complicated calibration [10]-[12] due to the large
number of error terms and error paths [11]. In some situations, the multiport calibration
can be simplified by ignoring the leakage between each port [13]. As for the situation of
non-negligible leakage such as the on-wafer MMIC multiport measurement, Ferrero and
Sanpiertro proposed a calibration method [14] to take these leakages into account. In
[14], one needs to perform 5 calibration steps to obtain 35 linear equations to solve all
the error terms of a leaky three-port VNA.
The alternative approach to obtain the S-matrix of a multiport device-under-test
(DUT) is to use a reduced port VNA and certain known terminations. It can characterize
a multiport network with less expensive equipments and ease the consideration of
calibration. However, the accuracy of results using these approaches would be affected
by the numerical issue of the reconstruction algorithm [5], [8], [15], the numerous
reconnections during the measurement and the confidence in those known terminations.
2
Ideally, one can use perfect terminations and a reduced port VNA to complete a
multiport measurement based on the definition of S-matrix. However, a perfect
termination is impractical and the imperfect effect must be taken into account. Rigorous
works of this issue have been proposed for decades. These methods using reduced port
VNA can be categorized into two types, which are direct reconstruction methods and
port reduction methods (PRMs). They will be discussed in the following two sections.
1.2 Reconstruction methods
Since a multiport VNA was not as commercially available in early days, some
rigorous works [2]-[5] proposed approaches to obtain the S-matrix of a multiport DUT
using a two-port VNA. These approaches have led to build a four-port measurement
system using a two-port VNA and switches [6]. The formula of these approaches to
reconstruct the S-matrix of a multiport DUT is based on matrices manipulation.
Associated researches in easing the requirement of known terminations [16] and in
accuracy analyzing [15] have also been presented. The concept of condition number is
used in [15]-[16] to explain how the terminations and the DUT affect the accuracy of
results. Such accuracy analysis is complicated and difficult because the matrix
manipulation used in these direct reconstruction methods are inherently abstract.
1.3 Port reduction methods
On the other hand, [7] provides a different point-of-view in reconstructing an
3
n-port S-matrix. This method reduces the number of measured ports by one by
connecting a known termination to the unmeasured port. The n-port S-matrix is then
reconstructed from a set of reduced (n-1)-port measured S-matrices. This PRM is
continued until it fails or reaches a port order at which a VNA is available. Three types
of PRMs are proposed in [8]-[9]. Reducing one port at a time simplifies the
reconstruction problem. The accuracy issue is therefore simpler [8] than that of direct
reconstruction methods and can be discussed in a physical sense.
1.4 Motivation and contribution
Among the reduced port methods, the reconstruction methods in [1]-[5] can reduce
the number of measured ports to two ports. Take the method presented in [5] as an
example. The reconstructed n-port S-matrix can be calculated from (10) in [5] given as
1 1
S =Γ -Σ− − (1.1)
where
Γ
is an n-by-n diagonal matrix which the diagonal elements are the reflectioncoefficients of the known terminations. The temporary matrix
Σ
is calculated from thereflection coefficients of the known terminations and the reduced port measured data.
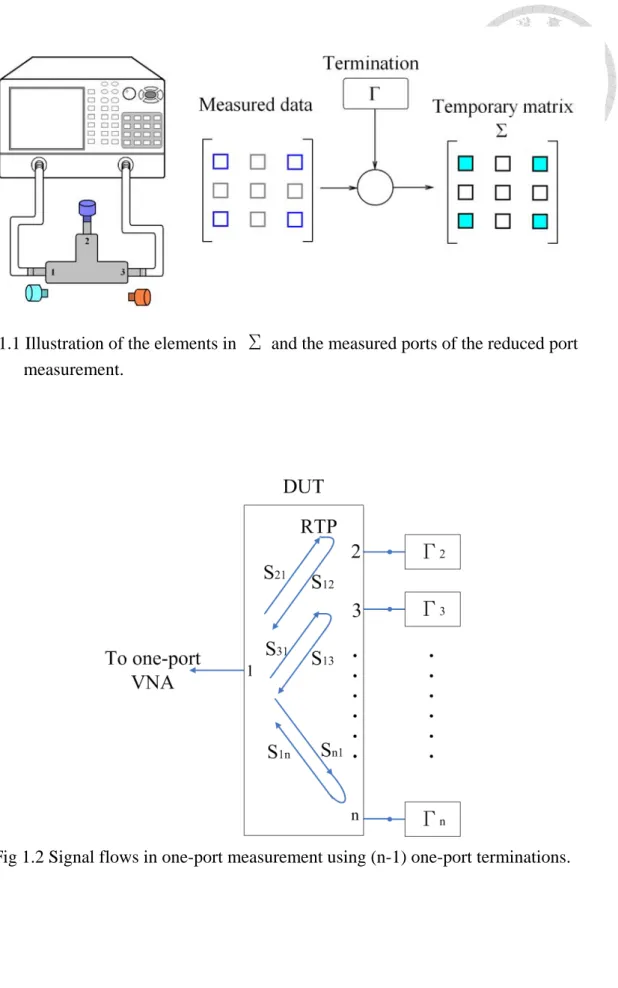
The measured ports of the reduced port measurement determine which elements in
Σ
can be calculated as shown in Fig. 1.1. The calculated elements in
Σ
are alwayssymmetric to the diagonal line. Therefore, the off-diagonal elements will not be
calculated if only one-port measurement is performed.
4
On the other hand, (5) and (6) in [8] given as
(
1 2)
1 21 2 1 2
( ) ( )
( ) ( )
1 1 n n ijn ijn
ij ij ij nn
n n n n
S S
S S S S
− + − = −
Γ Γ Γ Γ (1.2)
(
1 3)
1 31 3 1 3
( ) ( )
( ) ( )
1 1 n n ijn ijn
ij ij ij nn
n n n n
S S
S S S S
− + − = −
Γ Γ Γ Γ (1.3)
imply that the VNA used in applying the type-I PRM should have at least two ports to
obtain Sij( )n . Otherwise, only the diagonal elements of the S-matrix of the DUT can be
solved. Similar restriction can be observed in the type-II PRM [8]. The VNA must have
at least two ports to get the measured data Sin(n−1) which appears in (16) of [8]. As for
the type-III PRM, the condition i≠ stated in (8) of [9] clearly points that the type-III j
PRM is not suitable for one-port VNA. In fact, the type-III PRM could reduce the
number of measured ports to two ports for reciprocal circuits or three ports for
nonreciprocal circuits.
Conventionally, it is believed that the reconstruction by reducing the measured
ports to one port is quite difficult because the forward transmission coefficient always
multiplies with the backward transmission coefficient in a round trip path (RTP) to be
defined later. Fig 1.2 illustrates the problem in reducing the minimum number of
measured port to be one by using (n-1) one-port terminations. To solve this problem, an
auxiliary circuit is proposed in this study to provide additional signal paths as shown in
Fig 1.3 by taking a two-port DUT as an example. Such an arrangement will give the
5
one-port measured data of the VNA contains more information of the RTP, and make it
possible to separate the forward and reverse transmission coefficients of the DUT.
One-port VNA or six-port reflectometer has been available for years [17]. It is
much simpler in operation and less expensive than two-port and multiport VNAs. The
use of one-port VNAs can perform measurements of the insertion loss and the distance
to the fault of a cable and the reflection coefficient of a one-port DUT. Recently, USB
based one-port VNAs, such as Anritsu MS46121A and Copper Mountain Technologies
R54, are available. These then lead to this study of reducing the measured ports of a
multiport DUT to the minimum number to be one and acquiring its multiport S-matrix
in a cost-effective manner. Extending the operating frequency to the THz range,
one-port VNA can further ease the implementation difficulty of a sub-mmw multiport
VNA.
1.5 Chapter outline
Since the reduced port methods [1]-[9] can be applied to reduce the measured ports
to two ports, Chapter 2 mainly describes the formulation of acquiring the S-matrix of a
two-port DUT from one-port measurements with the use of an auxiliary circuit. The
formulation in dealing with the two-port DUT, including reciprocal and nonreciprocal,
is presented in Section. 2.1. The modified formulation for a two-port active network is
described in Section 2.2. Section 2.3 then describes an alternative method to determine
6
the S-matrix of a reciprocal DUT through a comparison process. By using this process,
one can characterize an n-port reciprocal DUT without using the reduced port methods
[1]-[9].
Chapter 3 describes the selection of auxiliary circuit. To reconstruct the S-matrix of
a two-port DUT, the number of one-port measurements in this study is five, which is in
excess of that of unknowns by one. However, for certain two-port nonreciprocal
networks such as isolator or amplifier as described in Section 3.1, one can properly
select the auxiliary circuit to reduce the number of measurements to four to be equal to
the number of unknowns. Section 3.2 then gives the criteria of auxiliary circuit in
characterizing a two-port active DUT. The effect of the selection of the auxiliary circuit
on the accuracy of the reconstructed results is discussed in Section 3.3 for a two-port
reciprocal DUT.
Chapter 4 presents four experimental results of reciprocal and nonreciprocal DUTs.
Three-port reciprocal and nonreciprocal examples are given in Section 4.1 and Section
4.2, respectively. In each example, the type-II PRM [8] is applied to reconstruct the
three-port S-matrix from two-port results. The reconstruction of two-port S-matrix from
one-port measurements is performed using the formulation to be presented in Section
2.1. The reason to use the type-II PRM rather than the type-I [8] or the type-III PRM [9]
is based on the fact that fewer one-port measurements are involved. Section 4.3 shows
7
the results of a two-port active DUT, while Section 4.4 shows the results of a three-port
reciprocal DUT by using comparison process. Finally, a conclusion is given in Chapter
5.
8
Fig 1.2 Signal flows in one-port measurement using (n-1) one-port terminations.
Fig 1.1 Illustration of the elements in
Σ
and the measured ports of the reduced port measurement.9
Fig 1.3 Assembly of auxiliary circuit and DUT.
10
Chapter 2 Formulation
This chapter describes the formulation of solving the S-matrix of a two-port DUT from a set of one-port measurements. Section 2.1 presents the formulation of a two-port
DUT. Section 2.2 then modifies the formulation to the case of a two-port active DUT.
One can then apply PRMs to the two-port results to reconstruct the S-matrix of an n-port
DUT. In Section 2.3, by applying the symmetry property of a reciprocal DUT, one can
find the S-matrix of an n-port reciprocal DUT through a comparison process [18]
without using the reduced port methods [1]-[9].
2.1 Two-port network
In this section, the formulation of solving the diagonal elements of a two-port
S-matrix from one-port measurements is given in Section 2.1.1. The formulation of
solving the off-diagonal elements with the use of auxiliary circuits is then given in
Section 2.1.2.
2.1.1 Diagonal elements
The reflection coefficient at port 1 of a two-port DUT by terminating its port 2 with
Γ2 is given by
12 21 2 (2)
11 11
22 2
1 S S S S
= + S
− Γ
Γ (2.1) or
(2) (2)
11 11 2 22 2( 12 21 11 22) 11
S +S ΓS +Γ S S −S S =S . (2.2)
11
The superscript of S11( 2) denotes that the terminated port is port 2. Similarly, by
terminating port 1 with Γ1, one can obtain the following equation for port 2
(1) (1)
22 22 1 11 1( 12 21 11 22) 22
S +S ΓS +Γ S S −S S =S . (2.3)
From (2.2) and (2.3), one may find that with the help of three known terminations,
for example, Γ2 a, Γ2b, and Γ1a, the three unknowns of S11, S22 and S S12 21−S S11 22
could be solved. After that, one can obtain S S12 21 by substituting the solved S11 and
S22 into (2.2) or (2.3). Therefore, from three one-port measurements of a two-port DUT by terminating the other port with three different known terminations, one can
solve the diagonal elements S11 and S22 and the RTP term S S12 21≡RTP through
the following matrix equation
(2 ) (2 )
2 2 11
11 11
(2 ) (2 )
2 2 22
11 11
(1 ) (1 )
1 1 11 22
22 22
1 1
1
a a
a a
b b
b b
a a
a a
S S S
S S S
S RTP S S S
=
−
Γ Γ
Γ Γ
Γ Γ
. (2.4)
In the above procedure, one sequentially connects two terminations at port 2 and
one termination at port 1 of DUT to solve the diagonal elements. Note, the diagonal
elements can also be solved if all the three terminations are sequentially connected at
port 1 or port 2. However, (2.4) is recommended for the consideration of accuracy.
Considering (2.1), corresponding to the case of connecting Γ at port 2, 2 S is an 11
individual unknown term while S is embedded in the denominator. The sensitivities 22
of solving S and 11 S are different. Further experimental results indicate that by 22
12
connecting one termination at one port and two terminations at the other port, the
accuracy of one diagonal element becomes slightly worse and the other one is
dramatically improved.
Note the RTP term in (2.4) is a multiplication of the forward transmission
coefficient S21 and the reverse transmission coefficient S12. Hence, the separation of
S21 and S12 needs additional measurements using an auxiliary circuit to be discussed Section 2.1.2.
2.1.2 Off-diagonal elements
In Fig. 1.3, a three-port auxiliary circuit is used to separate the RTP term in (2.4).
The three ports of the auxiliary circuit are denoted as P1, P2 and P3. Its S-matrix is
known and given by A whose elements are aij with i , j =1, 2, 3. Note that the
auxiliary circuit needs advance characterization using a three-port VNA.
As shown in Fig. 1.3, port P1 is connected to a VNA for one-port measurement.
Ports 1 and 2 of the DUT are connected to ports P2 and P3 of the auxiliary circuit.
The measured reflection coefficient Γ at port m P1 is given as [5]
Γm = AII +A S IIJ [ −A SJJ ]−1AJI
.
(2.5)In (2.5) S is a two-port S-matrix of the DUT, I is a unit matrix, and the remaining
matrices related to the auxiliary circuit are given by
13
=
II IJ
JI JJ
A A A A A
11 12 13
21 22 23
31 32 33
a a a
a a a
a a a
=
.
(2.6)By substituting (2.6) into (2.5), it can be explicitly expressed as
0 1 12 2 21
11
0 1 12 2 21
m
N N S N S
a B
D DS D S
+ +
− = ≡
+ +
Γ (2.7)
where
0 12 21 11 13 31 22
N =a a S +a a S
12 23 31 13 32 21 12 21 33 13 31 22 11 22
(a a a a a a a a a a a a )S S
+ + − −
12 21 33 13 31 22 12 31 23 13 32 21 12 21
(a a a a a a a a a a a a )S S
+ + − −
1 12 31
N =a a (2.8)
2 13 21
N =a a
and
0 1 22 11 33 22 ( 22 33 23 32) 11 22
D = −a S −a S + a a −a a S S +(a a23 32−a a22 33)S S12 21
1 32
D = − (2.9) a
2 23
D = − . a
One can further express S12 as
12 21
S RTP
= S (2.10) and rewrite (2.7) as a quadratic equation of S21 given by
2
2 2 21 0 0 21 1 1
(N −BD S) +(N −BD S) +(N −BD RTP) =0. (2.11) As the auxiliary circuit is properly characterized, all aij are known. By using the
known aij and S11, S22 and RTP solved from (2.4), one can then solve S21.
However, there are two solutions of S21 from (2.11). An additional one-port
14
measurement with the use of another auxiliary circuit is needed to solve another set of
two solutions of S21. These two sets then have the correct S21 in common. Once the
correct S21 is found, S12 can be calculated using (2.10).
In general, there are a total of five one-port measurements involved to reconstruct
the S-matrix of a two-port DUT. Three one-port measurements are used to solve the
diagonal elements S11 and S22 and RTP term as described in Section 2.1.1. In
Section 2.1.2, two additional one-port measurements are performed with the use of two
auxiliary circuits to solve the off-diagonal elements S21 and S12.
For a reciprocal two-port DUT, by applying S12 =S21 in (2.7), it becomes a linear
equation given by
0 1 2 21
11
0 1 2 21
( )
( )
m
N N N S
a D D D S
+ +
− =
+ +
Γ (2.12)
to solve S21 accordingly. Therefore, four one-port measurements are sufficient to
reconstruct the S-matrix of a reciprocal two-port DUT.
Note that for a reciprocal two-port DUT (2.10) can be written as
2
S21 =RTP. (2.13) The square root of RTP gives the sign ambiguity of S21 as discussed in [18],
however, (2.12) can solve S21 directly.
2.2 Two-port active network
In Section 2.1.1, a one-port termination is connected on the unmeasured DUT port
15
to solve the diagonal terms. This connection may cause possible oscillation or damage
the DUT as the two-port DUT is active. An alternative approach is then developed
without using one-port terminations. Instead, five auxiliary circuits are used to perform
five one-port measurements.
Since three one-port terminations in Section 2.1 are not used, the diagonal
elements become unknowns. Rewrite N0 in (2.8) as
0 a 11 b 22 c( 11 22 12 21)
N = N S +N S +N S S −S S (2.14) where
12 21
Na =a a
13 31
Nb=a a (2.15)
12 23 31 13 32 21 12 21 33 13 31 22.
Nc=a a a +a a a −a a a −a a a Similarly, D0 in (2.9) is rewritten as
0 1 a 11 b 22 c( 11 22 12 21)
D = +D S +D S +D S S −S S (2.16) where
22
Da = −a
33
Db = −a (2.17)
22 33 23 32
Dc =a a −a a By substituting (2.14) and (2.16) into (2.7), one can obtain a linear equation as
11 22 1 1 12 2 2 21 det
(Na −BD Sa) +(Nb−BD Sb) +(N −BD S) +(N −BD S) +(Nc−BD Sc) =B
(2.18)
where
det 11 22 12 21.
S =S S −S S (2.19)
Note there are five unknowns, S11, S22, S12, S21, and Sdet, in (2.18). All the
16
coefficients and constant term in (2.18) are related to the S-matrix of auxiliary circuit
and measured data. Therefore, one can solve these five unknowns through five one-port
measurements with the use of five different auxiliary circuits.
2.3 Reciprocal network using comparison process
This section describes a method to obtain the S-matrix of an n-port reciprocal DUT
without using the reduced port methods [1]-[9]. At first, the diagonal elements of the
n-port S-matrix and the RTP terms will be solved. By applying the symmetric property
of the S-matrix of a reciprocal DUT, the off-diagonal elements can then be solved by
directly taking square root of the RTP terms. However, this will result in several
possible S-matrices, and it will encounter an ambiguity problem in selecting the correct
one. To solve this, additional one-port measurements are performed with the use of a
characterized (n-1)-port auxiliary circuit. On the other hand, by applying the S-matrix of
the auxiliary circuit and all the possible S-matrices, one can calculate all the possible
one-port measured values according to the assembly of the DUT and the auxiliary
circuit. These calculated results are then compared with the one-port measured results.
The comparison results will then determine the correct S-matrix.
The formulation and the concept of solving the RTP terms and the diagonal
elements of the S-matrix of a reciprocal DUT is described in Section 2.3.1. The method
in finding the correct S-matrix and the way to reduce the number of one-port
17
measurements is described with a three-port DUT case as shown in Section 2.3.2.
2.3.1 Formulation
This section starts with (2.1) and a three-port DUT which its port 3 is terminated
with a termination. After the explanation of the notation and the introduction of the
formulation, the solution will then extend to an n-port DUT case.
Since a three-port DUT can be regarded as a two-port network if one of its port is
terminated, the method in Section 2.1.1 to solve the reflection coefficients and the RTP
term of a two-port network still stands in this case. However, the terms in (2.1) needs to
be modified to show the difference between a two-port DUT and a three-port DUT. The
modified equation of (2.1) is given as
(3) (3)
(3,2) (3) 12 21 2
11 11 (3)
22 2
1 S S S S
= + S
− Γ
Γ (2.20)
The term S11(3,2) is the reflection coefficient measured at port 1 of the DUT with its port
3 and port 2 are terminated with terminations. The superscript denotes the port or ports that are terminated with known terminations. From (2.20), one can solve S11(3), S22(3)
and S12(3)S21(3) with the use of three terminations Γ2 a, Γ2b, and Γ2 c. After that, since
the intermediate parameter S11(3) is composed as
13 31 3 (3)
11 11
33 3
1 S S S S
= + S
− Γ
Γ , (2.21) the reflection coefficients and the RTP term of the three-port DUT, e.g. S11, S33, and
18
13 31
S S , can be solved with the use of three terminations Γ3a, Γ3b, and Γ3c.
The above procedure shows two things that should be noticed. The first is that the intermediate RTP terms such as S12(3)S21(3) are helpless in solving the S-parameters of
the next higher order in port number. The other is that the number of measurements to
solve the diagonal elements of an n-port DUT is theoretically 3(n−1).
To extend to an n-port DUT, (2.20) can be rewritten as
( , 1,...,3) ( , 1,...,3)
( , 1,...,3,2) ( , 1,...,3) 12 21 2
11 11 ( , 1,...,3)
22 2
1
n n n n
n n n n
n n
S S
S S
S
− −
− −
= + −
−
Γ
Γ . (2.22)
From (2.22), it is clear that with three terminations placed in sequence, one can find
some of the intermediate parameters of the higher order in port number. A general form
of (2.22) is shown below, which could help finding the arbitrary intermediate
parameters. It is given as
( , 1,..., 1, 1,...) ( , 1,..., 1, 1,...) ( , 1,..., 1, , 1,...) ( , 1,..., 1, 1,...)
( , 1,..., 1, 1,...)
1
n n k k n n k k
n n k k k n n k k ik ki k
ii ii n n k k
kk k
S S
S S
S
− + − − + −
− + − − + −
− + −
= +
−
Γ
Γ . (2.23)
2.3.2 Three-port case
Section 2.3.1 has described the method in finding the RTP terms and the diagonal
elements of the S-matrix of an n-port reciprocal DUT. This section will use a three-port
reciprocal DUT as a specific example to demonstrate how to find the off-diagonal
elements. Furthermore, by properly choosing the terminated port of the DUT and
arranging the one-port measurements, the number of one-port measurements can be
19
reduced to be less than 3(n−1).
At first, a generalized form of (2.1) can be expressed as
( )
1
ij ji j j
ii ii
jj j
S S S S
= + S
− Γ
Γ . (2.24)
Consider a three-port reciprocal DUT with its port 3 is terminated with Γ3a, (2.20) can
be rewritten as
(3 ) (3 )
(3 ,2) (3 ) 12 21 2
11 11 (3 )
22 2
1
a a
a a
a
S S
S S
= + S
−
Γ
Γ (2.25)
and (2.4) becomes
(3 ,2 ) (3 ) (3 ,2 )
11 2 2 11 11
(3 ,2 ) (3 ) (3 ,2 )
11 2 2 22 11
(3 ,1 ) (3 ) (3 ) (3 ) (3 ) (3 ,1 )
22 1 1 12 21 11 22 22
1 1
1
a a a a a
a a
a b a a b
b b
a a a a a a a a
a a
S S S
S S S
S S S S S S
=
−
Γ Γ
Γ Γ
Γ Γ
. (2.26)
With the help of (2.26), one can solve the two intermediate parameters S11(3 )a and S22(3 )a .
Another two intermediate parameters S11(3 )b and S22(3 )b can also be solved from (2.26)
by simply replacing Γ3a with Γ3b. Similarly, the last two parameters S22(1 )a and
(1 ) 33
S a could be solved by terminating the port 1 of a three-port DUT with Γ1a. The
necessary one-port measurements are summarized in Table 2.1 (a). In this table the
corresponding one-port measurement of S11(3 ,2 )a a , for example, is denoted as “1_3a2a”.
The notation “*” marks the repeated measurement.
20
As described in Table 2.1 (a), six intermediate parameters are solved accordingly.
One can then use these intermediate parameters to find all the possible S-parameters of
the three-port DUT in the following three steps.
In the first step, one may solve S and 11 S by replacing all the 2’s in (2.4) with 33
3’s based on the three intermediate parameters of S11(3a), S11(3b) and S33(1a). In addition,
one can also obtain S S by substituting 13 31 S and 11 S into the expression of 33
13 31 11 33
S S −S S . Therefore, in this step, S , 11 S and 33 S S are solved as illustrated in 13 31
the first row of Table 2.1 (b).
In the second step, one can use the intermediate parameters S22(3a) and S22(3b) with
the case ( , )i j =(2,3) in (2.24) to write the corresponding matrix equation. Since S 33
is solved already, one can solve the unknowns of S and 22 S S using (2.27) as 23 32
illustrated in the second row of Table 2.1 (b).
(3 ) (3 )
3 22 22 22 3 33
(3 ) (3 )
3 23 32 22 22 3 33
1 .
1
a a
a a
b b
b a
S S S S
S S S S S
−
=
−
Γ Γ
Γ Γ (2.27)
In the last step, one can then calculate S S by using the intermediate parameter 12 21
) 1 ( 22
S a with (2.24) as
(1 )
22 22 11 1
12 21 1
( a )(1 a)
a
S S S
− − Γ =S S
Γ (2.28)
in which S and 11 S are already solved. This step is illustrated in the third row of 22
Table 2.1 (b).
21
Table 2.1 (b) then summarizes the procedures given above. The notation “**”
marks the parameters already solved in the second step. The solved results in Table 2.1
(b) include the three diagonal elements. As for the off-diagonal elements, because the
three-port DUT is reciprocal, one can simply take the square root of the solved results of
12 21
S S , S S and 13 31 S S . However, this would yield two possible values which are 23 32
180o apart for each term. If we use “+” and “-” to denote the solution in the upper half and lower half complex plane, there are eight configurations for (S ,12 S ,13 S ) with 23
ambiguities from (+, +, +) to (-, -, -).
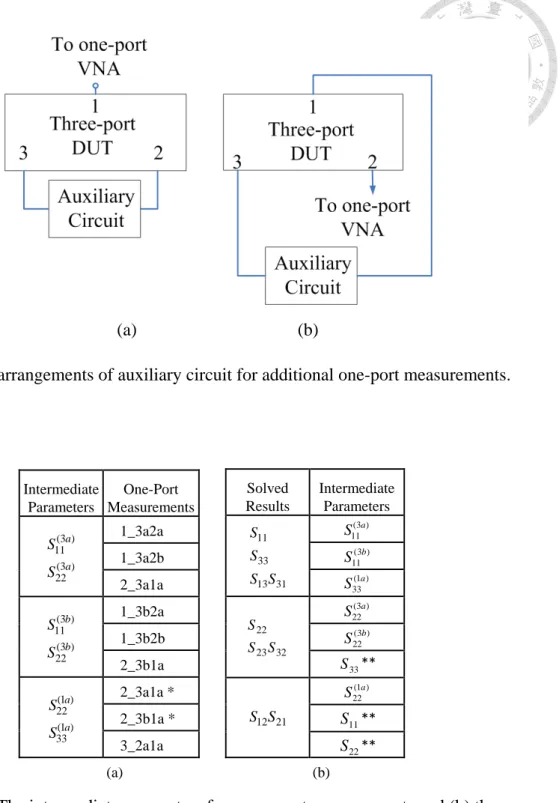
To separate the off-diagonal S-parameters apart, one needs additional one-port
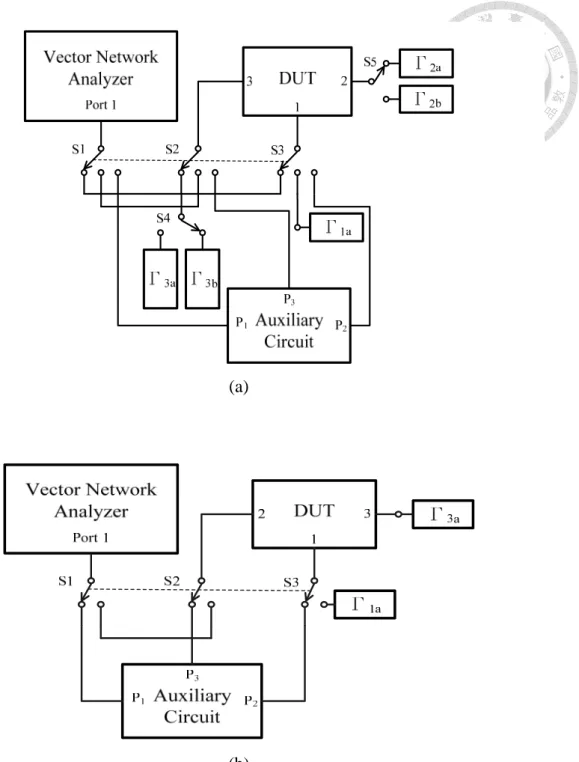
measurement as shown in Fig. 2.1. According to the assembly in Fig. 2.1(a), the DUT
port 2 and port 3 are connected to a known two-port auxiliary circuit. It then may give
signal paths not containing the RTP. Such paths can then be used to avoid the self
multiplication terms.
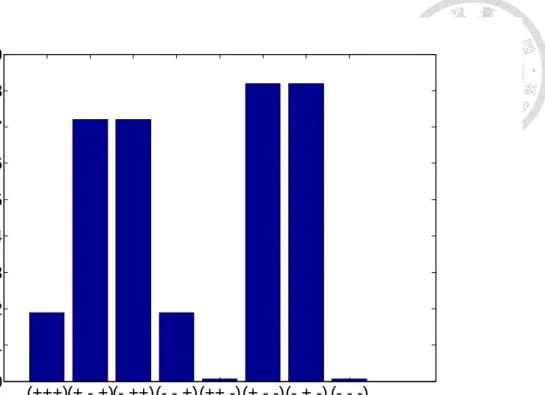
To achieve this, all the eight configurations are firstly listed, then the S-matrix of
the auxiliary circuit is applied to calculate the eight reflection coefficients according to
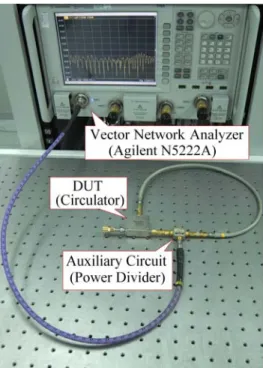
the arrangement of Fig 2.1 (a). Experimental study to be presented in Section 4.4 for an
Agilent 11667B power splitter is used as a three-port reciprocal DUT. By comparing the
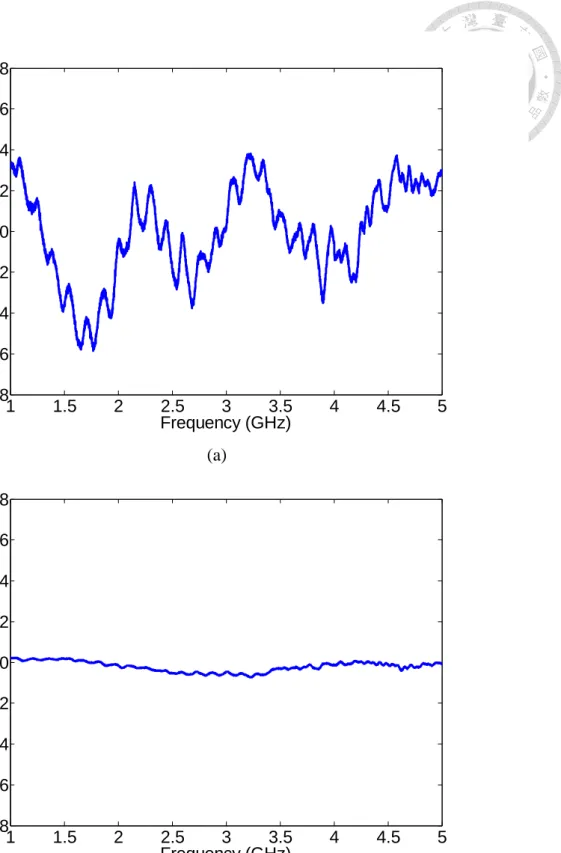
calculated and measured reflection coefficients, there are six configurations showing the
inconsistence as illustrated in Fig. 2.2. The vertical axis of Fig. 2.2 shows the distance
22
of the measured and calculated reflection coefficients defined as
Calculated Measured
Distance =Γ −Γ (2.29)
where “Γ” denotes the reflection coefficient. As for the remainder 2 configurations of
(+, +, -) and (-, -, -), another one-port measurement as shown in Fig 2.1 (b) is performed
to help selecting the correct one. Reconstructed results will be given in Section 4.4.
2.4 Summary
The formulations in reconstructing the S-matrix of a two-port network or an n-port
reciprocal network are presented in this chapter. To reduce the possibility of damaging
the DUT, the experimental procedure and the formulations for active devices are
modified. Generally speaking, the auxiliary circuits are required to be fully known.
However, the requirement of the auxiliary circuits used in the comparison process given
in Section 2.3 can be relaxed. Since the possible off-diagonal elements obtained in the
comparison process are 180o apart, a rough knowledge of the auxiliary circuits is
sufficient to determine the correct S-parameters.
Note that reconstruction methods in [8] and [9] use redundant equations to solve
the reflection coefficients of certain terminations. This then leads the terminations can
be partially unknown. However, in the one-port measurement case presented in this
chapter, only one equation is available in each one-port measurement. It is then difficult
23
to have redundant equations to make the auxiliary circuit partially known.
24
Fig. 2.1 Two arrangements of auxiliary circuit for additional one-port measurements.
Table 2.1 (a) The intermediate parameters from one-port measurements and (b) the intermediate parameters for solving the results.
Solved Results
Intermediate Parameters
31 13 33 11
S S S
S 11(3)
S a ) 3 ( 11
S b ) 1 ( 33
S a
32 23 22
S S S
) 3 ( 22
S a ) 3 ( 22
S b
S ** 33
21 12S S
) 1 ( 22
S a
S11**
S22**
(b) Intermediate
Parameters
One-Port Measurements
) 3 ( 22
) 3 ( 11
a a
S
S 1_3a2a
1_3a2b 2_3a1a
) 3 ( 22
) 3 ( 11
b b
S
S 1_3b2a
1_3b2b 2_3b1a
) 1 ( 33
) 1 ( 22
a a
S
S 2_3a1a *
2_3b1a * 3_2a1a
(a)
(a) (b)
25
Fig. 2.2 The distance between calculated and measured reflection coefficients at port 1 for eight configurations.
(+++)(+ - +)(- ++)(- - +)(++ -)(+ - -)(- + -) (- - -) 0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Configurations
Distance
26
Chapter 3 Selection of auxiliary circuit
Formulation has been presented in Chapter 2 to reconstruct the S-matrix of a two-port from a set of one-port measurements using auxiliary circuits. This chapter will
discuss the effect of the auxiliary circuit in terms of the three following items, the
reduction of the number of one-port measurements, the solvability, and the accuracy of
the reconstructed results.
Section 3.1 describes the suggestion in selecting the auxiliary circuit used in the
reconstruction method presented in Section 2.1, and the number of one-port
measurements can be reduced to four for certain two-port nonreciprocal DUTs. Section
3.2 then describes the criteria of the auxiliary circuits for a two-port active network.
Finally, to increase the accuracy of the reconstructed result for a reciprocal DUT in
Section 2.1, Section 3.3 discusses the consideration of the auxiliary circuit.
3.1 Two-port network
In this section, the effect of auxiliary circuit on the roots of (2.11) is discussed. The
possibility to reduce the number of one-port measurements to four for certain two-port
nonreciprocal DUT is also addressed.
Note (2.11) can be rewritten in a simpler quadratic form as
21 0
2
21+qS +r=
pS (3.1)
where p, q and r represent the corresponding coefficients. It will be proved in Appendix
27
A that for a three-port reciprocal auxiliary circuit, the ratio of coefficients p and q are
given as
) (S12 S21 p
q =− + . (3.2)
The coefficients of p and r are further related by
21 12S p S
r =
.
(3.3)as proved in Appendix B.
According to Vieta’s formulas for quadratics [19], from (3.2) and (3.3), the two roots of (2.11) must be S12 and S21 if the three-port auxiliary circuit is reciprocal. On
the contrary, for a nonreciprocal auxiliary circuit, only one of the two roots is S21,
while the other is meaningless.
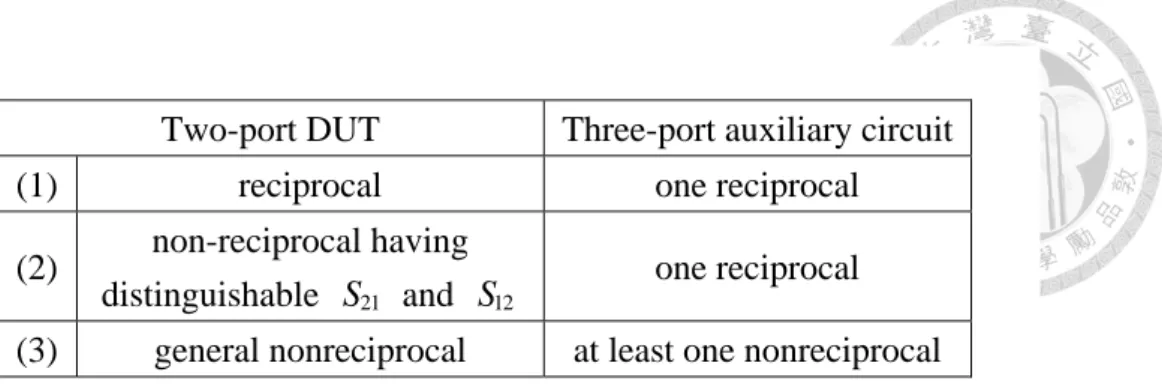
This leads that one should use a reciprocal auxiliary circuit and (2.12) to solve the
transmission coefficient of a reciprocal DUT as suggested in row (1) of Table 3.1.
Further discussion on using a reciprocal auxiliary circuit for a two-port reciprocal DUT
will be given in the Section 3.3 based on the accuracy consideration.
For certain two-port nonreciprocal DUTs whose S12 and S21 are distinguishable,
with the use of one reciprocal auxiliary circuit as suggested in row (2) of Table 3.1, one
could easily identify S21 and S12 from the roots of (2.11). The other additional
auxiliary circuit as described in Section 2.1.2 to identify the correct S21 is therefore not
necessary. The resulting number of one-port measurements is then four.
28
Amplifier is a typical example to use only one reciprocal auxiliary circuit. The
larger root of (2.11) should be S21 representing the amplifier forward gain, while the
other is S12. Isolator is another typical example, because its |S21| >> |S12|.
As for a general two-port nonreciprocal DUT, one needs two three-port auxiliary
circuits. Note one of the auxiliary circuits should be nonreciprocal as suggested in row
(3) of Table 3.1. Otherwise, the two sets of roots will be identical. Table 3.1 summarizes
the suggestion on selecting the proper auxiliary circuit for a two-port DUT.
3.2 Two-port active network
This section will discuss the solvability of (2.18) for a two-port active DUT in
terms of the auxiliary circuit. As described in Section 2.2, one can reconstruct the
S-matrix of a two-port active DUT with five one-port measurements and (2.18).
Specifically, the S-matrix is determined through the following matrix equation
=
ΣX B
(3.4)
where
(1) (1) (1) (1) (1) (1) (1) (1) (1) (1)
1 1 2 2
(2) (2) (2) (2) (2) (2) (2) (2) (2) (2)
1 1 2 2
(5) (5) (5) (5) (5) (5) (5) (5) (5) (5)
1 1 2 2
... ... ... ... ...
a a b b c c
a a b b c c
a a b b c c
N BD N BD N BD N BD N BD
N BD N BD N BD N BD N BD
N BD N BD N BD N BD N BD
− − − − −
− − − − −
− − − − −
Σ=
(3.5)
and
29
X
11
22
12
21
det
S S S S S
=
B
(1)
(2)
(3)
(4)
(5)
B B B B B
=
.
(3.6)Note that the superscripts in (3.5) and (3.6) denote the five one-port measurements. The
other superscripts used in the expressions in Chapter 2 denote the terminated port of
DUT and the corresponding termination.
By substituting (2.8) and (2.9) into (2.18), the coefficients of S12 and S21 can be
represented as
1 1 12 31 32
N −BD =a a +Ba (3.7)
2 2 21 13 23
N −BD =a a +Ba . (3.8)
From (3.7) and (3.8), one can find that if a reciprocal auxiliary circuit is used, the
coefficients of S12 and S21 are identical. Therefore, if the five auxiliary circuits used
in Section 2.2 are all reciprocal, the third and fourth columns of
Σ
become the same.As the result, the determinant of
Σ
is zero and (3.5) is not solvable. This then leadsthat at least one of the five auxiliary circuits used in Section 2.2 must be nonreciprocal
to guarantee the solvability of (3.5). It is also consistent with the suggestion given in
Table 3.1.
3.3 Two-port reciprocal network
This section will discuss the selection of the auxiliary circuit to improve the