行政院國家科學委員會專題研究計畫 成果報告
子計畫三:金屬板材彎曲成形製程之分析
計畫類別: 整合型計畫
計畫編號: NSC91-2212-E-011-027-
執行期間: 91 年 08 月 01 日至 92 年 07 月 31 日 執行單位: 國立臺灣科技大學機械工程系
計畫主持人: 黃佑民
計畫參與人員: 藍翔耀、陳聰嘉
報告類型: 完整報告
處理方式: 本計畫可公開查詢
中 華 民 國 92 年 10 月 23 日
行政院國家科學委員會補助專題研究計畫 成 果 報 告
□期中進度報告
智慧型金屬板材成形 CAE 軟體之開發與整合研究(3/3) ---子計畫三 金屬板材彎曲成形製程之分析
計畫類別:□ 個別型計畫 整合型計畫 計畫編號:NSC 89-2212-E-011-037-
NSC 90-2212-E-011-038-
NSC 91-2212-E-011-027-
執行期間: 89 年 08 月 01 日 至 92 年 07 月 31 日
計畫主持人:黃 佑 民 共同主持人:
計畫參與人員:藍翔耀、陳聰嘉
成果報告類型(依經費核定清單規定繳交):□精簡報告 完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
執行單位:國立台灣科技大學 機械工程學系
中 華 民 國 九十二 年 十 月 三十一 日
摘 要
本研究計畫為整合型計畫之子計畫三,以開發金屬板材成形三維 解析 CAE 軟體有關工件變形及應力與應變分佈之研究。在應力與應 變之關係式方面擬以 updated Lagrangian formulation (ULF) 理論為 基礎並結合有限變形的觀念,撰寫三維增量型彈塑性大變形有限元素 計算程式,並將此部份之 CAE 軟體與其他子計畫整合成完整的金屬 板材成形三維解析 CAE 軟體,並將其應用於金屬板材三維彎曲成形 之分析。在解析的過程中是以衝頭位移為計算增量,並配合元素的降 伏、工件與工具間的接觸或分離、最大應變及旋轉等增量的限制,來 決定每一計算步驟的位移增量,並以庫侖摩擦定律處理接觸界面間具 有滑動或黏滯狀態之摩擦變化。
關鍵詞:金屬成形,CAE 軟體,彈塑性分析、彎曲成形
Abstract
The main purpose of this sub proposal is to develop part of deformation as well as stress and strain distributions of CAE software of metal forming processes. A methodology for formulating an elasto- plastic finite element CAE software, which is based on an ULF (updated Lagrangian formulation), will be developed to simulate the 3D metal forming process. The CAE computer code will be established to analyze the 3D bending process of sheet metal. In the analyzing processes, the punch displacement is used to represent the simulation increment. The displacement increment of the calculation step is determined by the yield state of the element, contact or separation between the workpiece and tools, and the incremental confinement of the maximum strain and the rotation angle. The Coulomb friction law was introduced to treat the alternation of sliding or sticking state of friction at the contact interface.
Keyword: metal forming, CAE software, elasto-plastic analysis, bending
process.目 錄
摘 要... I
ABSTRACT... II
目 錄...III 圖表索引...V一、前 言...1
二、基本理論
...8
2.1 基本假設 ...8
2.2 有限變形之應變與應變率 ...8
2.3 有限變形之應力與應力率 ...11
2.4 有限變形之 T
OTAL
LAGRANGIAN
FORMULATION
...142.5 有限變形之 U
PDATE
LAGRANGIAN
FORMULATION
...172.6 材料之彈塑性構成關係式 ...18
三、數值分析
...24
3.1 簡介...24
3.2 虛速度原理的離散化 ...26
3.3 退化殼元素(D
EGENERATED
SHELL
ELEMENT
)之分析...273.4 不同積分法則推導退化殼元素之剛性矩陣 ...29
3.5 摩擦處理 ...31
3.6 廣義
R
MIN法之增量步驟的計算...34四、結果與討論
...37
4.1 實驗與材料參數 ...38
4.2 數值分析 ...39
4.3 除荷之設定 ...40
4.4 有限元素模式之實驗驗證 ...41
4.5 數值模擬結果討論 ...41
五、參考文獻
...54
六、誌 謝...57
七、計劃成果自評
...58
圖表索引
圖1-1 智慧型 CAE 軟體開發流程圖 ...7
圖2-1 連續體在
t
=t 0
與t
= 時之變化狀況 ...23t
圖2-2 定義應力之連體座標 ...23圖2-3 平衡時之連體體積與曲面定義 ...23
圖3-1 退化殼元素之座標 ...36
圖3-2 殼元素之自由度 ...36
圖3-3 接觸彈簧元素 ...36
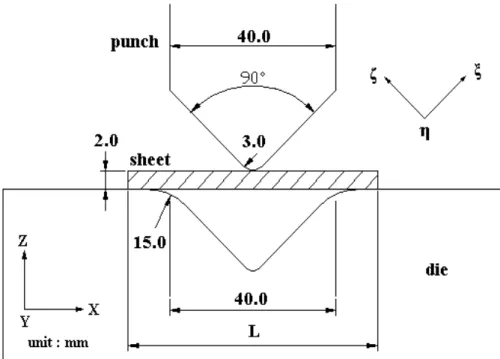
圖4-1 馬鞍成形製程之模具幾何尺寸 ...44
照片4-1 馬鞍成形製程在不同沖程之成品(B
LANK
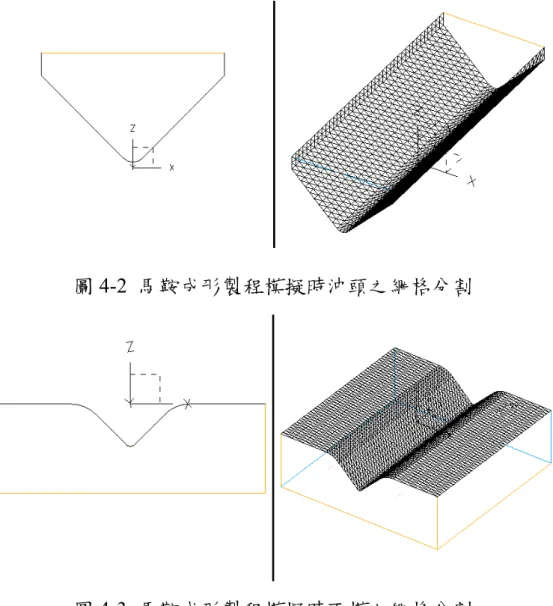
3) ...44圖4-2 馬鞍成形製程模擬時沖頭之網格分割...45
圖4-3 馬鞍成形製程模擬時下模之網格分割...45
圖4-4 馬鞍成形製程模擬時板材之網格分割...45
表4-1 模具與板材有限元素網格分割之相關數據...46
圖4-5 馬鞍成形製程數值模擬與實驗之沖頭負荷與沖程關係之比較 ...46
圖4-6 馬鞍成形製程除荷後彎曲角度之計算值與實驗值...47
圖4-7 馬鞍成形製程模擬時板材之變形履歷...47
圖4-8 馬鞍成形製程模擬時不同沖程之應力分佈圖...49
圖4-9 馬鞍成形製程彎曲軸兩端之撓曲情形...49
圖4-10 馬鞍成形製程模擬時之不同沖程主應變分佈圖...51
圖4-11 馬鞍成形製程模擬時不同沖程之反作用力分佈圖...52
圖4-12 馬鞍成形製程模擬時除荷後之厚度分佈圖...53
圖4-13 馬鞍成形製程不同沖程及不同板材寬度時的馬鞍外型...53
一、前 言
國內汽車工業、家電工業等產業,其產品製造的過程中,金屬板 材成形的加工製程所佔比率相當高,且隨著消費者導向的時代來臨,
新規範的產品開發、設計越來越多,所開發的產品也朝著少量而多樣 化的方向發展,每一新產品之生命週期越來越短。以汽車為例,每隔 幾年各汽車製造廠為了滿足顧客的需求,必須要將汽車改款,使同一 款式的產品週期越來越短,因此,以往靠經驗與感覺來設計
→
試作→
試驗
→
修正設計→
再試作→
再試驗等步驟之傳統設計方法浪費工 時,降低產品的競爭力。藉由CAE 軟體可將設計→
試作→
試驗→
修 正設計→
再試作→
再試驗等反覆的步驟,利用電腦支援而縮短開發及 設計時程因而降低成本,亦可提升新產品的品質與設計最佳化。金屬板金成形之數值模擬為一複雜且困難的工作,因成形之過程 為非線性問題,而造成此非線性的因素大致可分為三個部分:第一為 工件變形的大位移、大旋轉與大應變所造成幾何上的非線性行為;第 二為因變形而產生的材料非線性構成關係;第三為成形製程中,料片 與模具接觸界面之幾何外形的函數之非線性關係。上述的各種非線性 問題,皆增加了金屬板金成形製程模擬的複雜性。本研究之方法乃結 合有限變形理論ULF(updated Lagrangian formulation) 的觀念,採用 Cauchy 應力的 Jaumann rate 關係式,並忽略元素的密度或體積之變化
下,建立一個 incremental updated Lagrangian formulation 之彈塑性大 變形、大應變有限元素解析程式。本程式係以沖頭之增量位移為每一 變形增量步驟之起始增量值,文中採用 Yamada 的 r
min
方法來判斷材 料內任一元素的彈塑性狀態變換問題,並將此方法擴展至料片上節點 之接觸、分離的判斷,摩擦方向的轉換及有關最大應變增量、最大旋 轉增量的線性化處理,以決定板金成形時每一增量的位移、應變、應 力與除荷後料片之回彈現象與工件最後形狀。彎曲成形、拉伸成形及深引伸成形為板金成形之基本加工方法,
而本子計畫所探討 V 形彎曲成形係屬於板金彎曲成形加工之一種,
其成形加工過程是將料片放置於沖模上,藉由沖頭對沖模之相對位移 作彎曲成形。板金彎曲成形加工法為一重要且應用廣泛之板金成形加 工方式,其操作程序簡單,但在實際的生產過程中則包含了幾個重要 的技術問題,如對於彎曲加工除荷後回彈作用(即 spring-back 或 spring-forward)的模具設計問題、彎曲成形製程形狀精確的控制要 求、彎曲成形性的極限問題、彎曲表面拉伸的破壞之形成及彎曲負荷 的預估等。V 型模具彎曲成形為最重要的彎曲加工製程,係一非穩態 之加工製程,彎曲成形過程可分為兩個階段,即 air bending 與 coining,首先板材彎曲滑入模具內部直至彎曲部份之外緣貼在模具內 面上為air bending 階段,隨後即為 coining 階段,沖頭緊壓板材貼在
模具內表面上以確定彎曲的形狀與角度,而後沖頭離開,產生除荷回 彈作用(即 spring-back 或 spring-forward)而形成彎曲最後的形狀與尺 寸。除荷回彈的行為明顯的影響板金彎曲的最後形狀,且成形過程中 coining 階段的作用使其更加複雜化。在精確的板材彎曲之要求下,
必須預估除荷後的彎曲角度,其值受材料特性、模具形狀等加工參數 與coining 的作用所影響,coining 階段可減少彎曲變形除荷時所產生 的回彈作用。以往一般對彎曲變形除荷時的回彈分析皆不考慮coining 作用的影響,僅考慮純彎矩彎曲的簡單模式。但由上述可知 V 型彎 曲馬鞍成形除荷作用的預估是複雜且困難的。
近年來,仍有許多研究學者將有限元素法應用於分析板金成形問 題上,且電腦的快速發展,使得其運算能力與速度大幅提昇,在處理 複雜且高階非線性問題時可縮短其計算的時間,而這些研究成果可提 供工業界作為板金成形實際加工之參考依據。然而過去數年間,板金 V 型彎曲加工研究並未受到明顯的重視。而與本研究相關文獻有 Yamada 、 Yoshimura 與 Sakurai [1] 依 據 von Mises 降 伏 準 則 與 Prandtl-Reuss 塑流法則,推導出等向性材料之彈塑性應力—應變關係 矩陣,並以
r min
法控制元素由彈性進入塑性狀態時,其應力狀態能先 達到降伏曲面上。Hibbitt、Marcal 與 Rice [2]提出參考未變形前的最 初始狀態,以Total Lagrangian Formulation (TLF)推導出適用於大變形的彈塑性有限元素模式,並建立增量型式的分析方法。Wang [3]計算 金屬圓形胚料受沖頭拉伸引伸之大塑性變形,並使用塑性增量理論分 析半球狀沖頭拉伸引伸圓形胚料時之應力與應變分佈情形。1975 年 McMeeking 與 Rice[4]引用 Hill[5]的變分原理,藉由參考體瞬時狀態 (current state)的 ULF 建立了彈塑性大變形有限元素分析模式,由於邊 界上的處理較為簡單,故較適合分析大變形金屬成形問題。Pillinger、
Hartley、Sturgess 及 Rowe[6]運用線性化的增量方式來處理近似非線 性的大變形旋轉效應,以保持增量之精確性。Kim、Oh 與 Kobayashi [7]以薄膜理論之有限元素法探討半球形沖頭拉伸引伸成形時的料片 厚度變化與相對位置之關係。Liu 等[8]利用退化非線性殼理論推導合 應力退化殼元素,並以圓柱體受到軸向負荷產生挫屈為例進行數值分 析。Keum 等[9]提出可適用於任意剛體模具外形,且僅需要描述位置 資料之模具曲面的新方法,而此方法已由基於 B-曲線(B-spline)及線 性內插法所描述的一般曲面的剛-黏塑性有限元素分析程式所完 成,並驗證此方法較以往所用的三維有限元素分析法更有效率。
Makinouchi 與 Kawka [10]研究有限元素模擬模鍛(stamping)模具之設 計,藉由數值模擬來預測與估計板金成形過程中的缺陷以替代傳統的 試誤法,其理論背景與數值分析是由有限元素程式完成。Kawka 與 Makinouchi [11]亦提出退化殼元素的構想在靜態顯函有限元素程式
中執行,主要探討各種不同的積分法則比較,分別為完全積分(FI)、
減化積分(RI)、選擇減化積分(SRI)、假設應變場(ASF)與穩定矩陣(SM) 法則等。Lin 與 Tseng[12]為了解決金屬成形在彈塑性區間的接觸問 題,而應用一表面彈簧元素並將其元素之對稱性剛性矩陣疊加於整體 剛性矩陣中,組成有限元素之分析方法,經由實驗結果與其數值分析 結果之驗證,證明其方法可準確地模擬實驗結果。Lange [13]對板金 彎曲系列加工作了廣泛且深入的介紹,Weinmann [14]對熱軋高強度 低合金板金作一系列實驗,探討最大air bending 負荷與受 coining 作 用下的彈性除荷過程受沖頭半徑、模具寬度與板金厚度的影響與變 化,Magnusson 與 Tan [15]以純彎矩彎曲的初等解理論分析 V 型彎曲 加工,Huang、Lu 與 Makinouchi [16,17]以彈塑性二維有限元素增量 型式分析平面應變型式的無摩擦 V 型彎曲製程,同時揭露彎曲除荷 時spring-back 與 spring-forward 的回彈現象,並計算由起始彎曲變形 至最後除荷過程的全部彎曲成形形狀與應力、應變分佈,Makinouchi [18]以 r
min
方法處理無摩擦作用的 draw bending 製程的接觸問題,成 功的表達了板材與模具的接觸現象。本計畫為整合型計畫,其總體目標在於開發一套分析三維金屬板 材成形製程分析之有限元素 CAE 軟體,並於完成後能推廣且應用於 工業界。其各子計畫間之整體相關架構及研究目標,如圖1-1 所示。
本研究之有限元素分析是採用四節點四邊形退化殼元素推導剛性矩 陣,並以商用套裝軟體進行前後處理,將所建立的模具與板材經過網 格分割後轉換成數據檔,輸入增量型彈塑性大變形三維有限元素分析 程式中進行數值解析,來探討 V 型彎曲馬鞍成形製程,將所模擬出之 沖頭負荷與沖程之結果與實驗結果做比較,並且探討板材厚度分佈,
最後將分析結果輸出至商用套裝軟體顯示變形圖以及應力與應變分 佈圖,以作為模具設計與加工製程時之參考。
智慧型金屬板材成形CAE軟體 之開發與整合研究
金屬板材突緣引伸 成形製程之分析
金屬板材深引伸耳 緣成形製程之分析
金屬板材彎曲成形 製程之分析
金屬板材方杯引伸 成形製程之分析
CAE軟體之後置處 理 CAE軟體之應力與
應變分析 CAE軟體之剛性矩
陣建構 CAE軟體之前置處
理
子計劃一 子計劃二 子計劃三 子計劃四
初步CAE軟體架構
子 計 劃 名 稱
第 一 年
CAE軟體之測試 第
二 金屬板材突緣引伸 年
分析與實驗
金屬板材深引伸耳 緣成形分析與實驗
金屬板材彎曲成形 分析與實驗
金屬板材方杯引伸 成形分析與實驗
智慧型CAE軟體
將程式系統化 試用平行計算改善
程式運算效率 將材料之破裂分析
整合到程式中 將程式簡化為PC版
第 三 年
圖1-1 智慧型 CAE 軟體開發流程圖
二、基本理論
2.1 基本假設
本研究所考慮之材料彈塑變形時,其基本假設條件如下:
(1) 材料為均質性(homogeneous)及平面異向性(planar anisotropic)。
(2) 材料於加工時不考慮溫度影響。
(3) 材料於彈性區域內滿足虎克定律。
(4) 材料遵循 Hill 降伏法則,且於塑性變形後,依循 Prandtl-Reuss 之流動法則。
(5) 材料之構成方程式包含等向性之應變硬化影響。
(6) 材料之應變率可分為彈性與塑性應變率兩部份。
(7) 沖頭、沖模與壓料板皆視為剛體。
2.2 有限變形之應變與應變率
在處理有限變形之彈塑性問題時,因其變形是屬於大變形問題,
須考慮物體之形狀變化與位置變化,故基於不同的座標系統(變形前 和變形後的座標)所描述之物理量將有所差異。在本節及下節中討論 各種不同的應變、應變率、應力與應力率之間的關係,並分別以張量 和矩陣的形式表示。
如圖 2-1 所示,物體某微小線段變形前為
A
oB
o,變形後為AB
。其應變張量(strain tensor)可定義為
) 2(
1
ij j i
ij a
X x X g x
E
−∂
∂
∂
= αβ ∂ α β (2.1)
或
) 2(
1
j i
ij
ij x
X x a X
g
A
∂∂
∂
− ∂
= αβ α β (2.2)
E 即為 Green 應變張量,係以變形前的座標系統 ij X 為準而定義之應 i
變。
A 則為 Almansi 應變張量,係以變形後的座標系統 ij x 為準所定義 i
之應變。其中a 為座標系統 ij X i
(i
=1,2,3)之度量張量(metric tensor),g ij
為座標系統x i
(i
=1,2,3)之度量張量。座標系統若採用直角卡式座標 (rectangular Cartesian coordinates)或埋入座標(convected coordinates), 則a ij
=g ij
=δij
(δ 為ij
Kronecker’s symbol),則Green 應變以張量形式 表示為) 2(
1
ij
j k i
ij k X
x X
E x
∂∂ −δ∂∂
= (2.3)
或以矩陣形式表示為 ]) [ ] ][
2([
] 1
[
E
=J J T
−I
其中[J 為 Jacobian 矩陣,] [
J
]T
為[J 之轉置矩陣(transpose matrix),] ][I 則為單位矩陣。Green 應變率為 Green 應變對時間的導數,故(2.3)
式微分可得應變率
) 2(
1
j k i k j
k i ij k
X x X x X
x X E x
∂
∂
∂ + ∂
∂
∂
∂
= ∂
•
• •
(2.4)
或
) ] ][
[ ] ][
2([
] 1
[
E •
=J • J T
+J J • T
其中[
J 為 •
] ] ][[ ]
[
J •
=J L
(2.5)其中[L 是以變形後空間固定座標]
x
,y
,z
(x 1
,x 2
,x 3
)為基準而定義的物 理量(L ij
=∂v i
/∂x j
),稱為速度梯度矩陣(velocity gradient matrix)。又[
J •
]T
=[L
]T
[J
]T
故[E 可改寫成 •
]T T
T
T J L J J J
J L J
E
([ ][ ][ ] [ ][ ] [ ] ) [ ][ ][ ] 2] 1
[
•
= + = ε•
(2.6)其中
) ] [ ] 2([
] 1
[ε
•
=L
+L T
或 ( ) 21
i j j
ij i
x v x
v
∂ +∂
∂
= ∂
ε
•
(2.7)]
[
E 稱為 Green 應變率矩陣,係與變形前的座標 • X
,Y
,Z
有關的量。[ε•
] 是根據物體不斷變形而改變的固定座標x ,
,y z
為基準而定義的量,稱 為Cauchy 應變率矩陣,為 ULF(updated Lagrangian formulation)所 採用的應變率。變形前之微量體積
dV 與變形後之微量體積 dV 之關係為 0
J X J
x dV dV
j
i
= =∂∂
= det[ ]
0
(2.8)
其中 J 為 ][J 的行列式值。且由質量不變定律可得
ρ ρ
0
=
J
(2.9)其中ρ
o
與ρ分別為變形前與變形後之密度。2.3 有限變形之應力與應力率
在處理有限變形之彈塑性問題時,應力則須給予明確的定義,一 般常使用之應力有 Lagrange 應力、Kirchhoff 應力和 Cauchy 應力三 種。本節對此三種應力之定義加以說明,並推導在 ULF 下應力率之 間的關係。如圖2-2 所示,左側為變形前之狀態,右側為變形後之狀 態。
(1)Lagrange 應力(
s ij
)} { ] [ } {
)
;( T o
i o oj L ji
oi s n dS dF dF s dS
dF
= = = (2.10)其中
s ji
為 Lagrange 應力張量,具有非對稱形式,以變形前之面 積dS 為基準,其中 o n 為 oj dS 之單位法線向量之分量。 o
(2)Kirchhoff 應力(
t ij
)} { ] [ ] [ } {
)
;( i T T o
o oj K ji
oi dF dF J t dS
x dS X
n t
dF
= = ∂∂ α =α (2.11)
其中
t 為 Kirchhoff 應力張量。 ji
(3)Cauchy 應力(σ
ij
)} { ] [ } {
;
dF dS dS
n
dF i
= σji j
= σT
(2.12)其中σ 為 Cauchy 應力張量,變形後之力dF,以變形後之面積dS
ji
為基準所得之應力,係一對稱之應力張量,即σ
ij
=σji
,n 為 dS j
之單位法線向量之分量。為了求得各種不同定義應力間之關係,由質量不變定律得知
o i oj
o j
i n dS
x dS X
n
∂∂ ρρ
= (2.13)
由(2.10)式與(2.12)式可得 Lagrange 應力和 Cauchy 應力間之關 係為
] [ ] [ ]
[
s
=J G T
σ (2.14)同理,由(2.11)式與(2.12)式可得 Kirchhoff 應力和 Cauchy 應力 間之關係為
] ][
[ ] [ ]
[
t
=J G T
σG
(2.15)其中[
G
]= J[ ]− 1
,即[J
][G
]=[I
],整理上列關係式後,可獲得各種應 力間之關係為] [ ] [ ] ][
[ ]
[
s
=t J
=J G T
σ (2.16)(2.16)式對時間的導數,可得到各種應力的變化率 ]
][
[ ] ][
[ ]
[
s •
=t • J
+t J •
(2.17)] [ ] [ ] [ ] [ ] [ ] [ ]
[
s •
=J • G T
σ +J G • T
σ +J G T
σ•
(2.18)在 ULF 的場合裡,因是以每一時刻下物理性質和幾何形狀為基準,
故以下的關係式成立。
] [ ] [ ]
[
J
=G
=I
] [ ] [J •
=L
] [ ]
[
G •
= −L
] [ ] [E •
= ε•
] [ ] [ ]
[
s
= σ =t
=1
J
ρ ρ
•
•
=−J
將上列各式代入(2.17)式及(2.18)式中,得到 ]
][
[ ] [ ]
[
s •
=t •
+ σL
(2.19)] [ ] [ ] [ ] [ ]
[ σ σ
ρ
σ ρ
L T
s
= − −• •
•
(2.20)(2.19)式的 ][
t 為 Kirchhoff 應力的埋入微分(convected rate),係以 •
埋入座標X
,Y
,Z
變形後所產生的新方向來定義,亦即觀察者隨物體一 起變形與轉動所看到的應力變化率。(2.20)式的[
σ•]
係根據空間固定 座標系x ,
,y z
所定義,變形後曲面上的作用力、變形後之面積及時間 之關係來定義,稱為Cauchy 應力的固有微分(intrinsic rate),是觀察 者在固定座標系上所看到的應力變化率。另外定義一種應力變化率,稱為應力的Jaumann 微分,即觀察者隨著物體轉動,但不隨著變形而 觀察所得到的應力變化率。設時間
t 時,空間固定座標系 X
,Y
,Z
的 Cauchy 應力為 ][σ ,轉動座標系的 Cauchy 應力為[σω],兩應力間如使用一座標轉換矩陣[T ,則得下式成立 ] ]
][
[ ] [ ]
[σω =
T T
σT
(2.21) 微分(2.21)式,則得Cauchy 應力的Jaumann微分[σo
][ ]
[ ][ ]] ][
[ ] [ ] ][
[ ] [ ]
[σ
o
=T • T
σT
+T T
σ• T
+T T
σT •
(2.22)在ULF 時,[
T
]T
=[T
]=[I
],[σω]=[σ]其中[T •
]之具體形式為] [ ] [ ] [ 0
0 0
]
[
T L
x y
x z
y z
−
=
=
⎥⎥
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢⎢
⎢
⎣
⎡
−
−
−
=
• •
•
•
•
•
•
•
•
ω εω ω
ω ω
ω ω
(2.23)
其中
) 2(
1
j i i
k j
x v x
v
∂
− ∂
∂
= ∂
ω
•
(2.24)]
[
ω• 稱為轉動矩陣。將(2.23)式代入(2.22)式,可得 ]][
[ ] ][
[ ] [ ]
[σ
o
= σ•
+ σ ω•
− ω•
σ (2.25)結合(2.25)式與(2.20)式,可得
] [ ] ][
[ ] ][
[ ] [ ] [ ] [
] [ ] ][
[ ] [ ] [ ] [ ] [
ρ σ σ ρ
ε σ σ
ε σ
ρ σ ω ρ σ σ
ε σ
• •
•
• •
•
•
− +
−
−
=
−
−
−
=
L s
T T
T
o o
(2.26)
2.4有限變形之 Total Lagrangian Formulation
如圖 2-3 所示,一物體在時間為
t
o之變形前平衡狀態,由座標系 統X
i表示,且其體積為V
o,表面積為S
o,微小體積為dV
o,微小表面積為
dS
o,n
o為dS
o之單位法線向量分量。在時間為t
之變形平衡狀態,由座標系統
x
i表示,其體積為V
,表面積為S
,微小體積為dV
,微小 表面積為dS
,n
為dS
之單位法線向量分量。若考慮作用在變形後dS
面 上之微小表面積力dF
,與dV
體積上之微小體積力dF
b,則單位表面力f
及單位體積力b
,則可由下列公式表示dS
f
dF i
=i
(2.27)dV
b
dF bi
=i
(2.28) 如以變形前之座標系統為準,則單位面積之表面力f
o與單位體積 之體積力b
o,則可由下列公式表示o oi
i f dS
dF
= (2.29)o oi
bi b dV
dF
= (2.30) 考慮表面力F
與體積力F
b間之平衡方程式,則=0 +
bi
i F
F
(2.31) 積分(2.28)式及(2.30)式,可得∫
∫
==
V i Vo oi o
bi b dV b dV
F
(2.32) 而由(2.29)式兩側積分得S ji oj o
i s n dS
F
∫
o= (2.33)
利用Gauss 散度定理,(2.33)等號右側可寫為
V j o
ji
So ji oj o dV
X dS s
n s
∫
o∫
= ∂∂ (2.34)將(2.32)式與(2.34)式代入(2.31)式,可得 0
)
(∂ + =
∫ Vo
∂j oi o
ji b dV
X
s
(2.35)由於
dV o
可為任意範圍,故上式得知=0
∂ +
∂
j oi
ji b
X
s
(2.36)則上式以變形前座標為基準所推導出之平衡方程式,而對時間微分後 可得
=0
∂ +
∂
• •
oi j
ji b
X
s
(2.37)(2.37)式其邊界條件分別為
ji oj
oi s n
f •
•
= onS ot
(2.38)i u i
v
= on• S ou
(2.39) 在上兩式中,S ot
表示具有表面力之表面,S ou
為具有已知速度之表 面,f
oi為單位表面積之表面力,而f
•oi為其表面力變化率,v
i為速度,u
i為位移。將上述理論偶合入有限元素法時,必須經由虛功原理推導。假設 在物體之表面
S
o上給予一假想之速度δ v
i,則表面力f
oi所產生的虛功 率δ W
• 為S oi i o o
S f oi v i dS f v dS
W
ot
o
∫
∫
=•
=δ δ
δ (2.40)
對於 Lagrange 應力,考慮邊界條件(2.38)式,可知 Lagrange 應力
率
s
•ji的虛功原理也是成立的,故可得o i S ji oj o
S f oi v i dS s n v dS
o o
δ
δ
∫
∫ •
=•
(2.41)應用Gauss 散度定理,則
V o
j ji i o
V i j ji V o
j ji i o
i S ji oj
X dV s v
dV X v
s X dV
v dS s
v n s
o o
o o
∫
∫
∫
∫
∂ + ∂
∂
= ∂
∂
= ∂
• •
• •
) ( )
(
δ δ δ δ
(2.42)
結合(2.37)、(2.41)與(2.42)三式,整理得到虛功原理方程式為
o V oi i
o S oi i
V s ji L ij dV o f v dS b v dV
o o
o
δ δ
δ
∫ ∫
∫ •
=•
+•
(2.43)其中
j
ij X i
L
=∂∂δv
δ ( )由於(2.43)式係基於變形前之座標系統下推導而得,故稱為 Total Lagrangian Formulation (TLF)。
2.5 有限變形之 Update Lagrangian Formulation
上節所述之 TLF 理論係以
t
o時刻為變形前之座標X
i為基準所建 立之虛功原理方程式。本節則討論每一變形後時刻t
,以變形後之座 標x
i為基準而加以考慮之情形。因此前節所述之座標X
j以x
j取代,V
o 及S
o分別以V
及S
置換,而f
•oi與b
•oi則以f
•i與b
•i取代,即可得 Updated Lagrangian Formulation(ULF)虛功原理方程式如下:dV v b dS
v f dV
L
s i
V i
S i i
V ji
δij ∫
δ∫
δ∫ •
=•
+•
(2.44)由於 ULF 係以 t 時刻之變形後狀態為參考狀態,並於微小 dt 之時刻 後,在更新其變形狀態為參考狀態。因此,對於邊界之描述與處理較 為簡易,而不像TLF 必須時時刻刻參考其初始狀態,故 ULF 為多數 研究人員所採用。本研究亦以(2.44)式為基礎,來建立有限元素法 之統制方程式。在 ULF 時,[
t
]=[σ],可知] ][
[ ] ][
[ ] ][
[ ] ][
[ ] [ ]
[
t o
=• t
−L
σ + ε•
σ + σL
− σ ε•
(2.45)代入[
t •
]=[s •
]+[L
][σ]之關係,得到L T
t
s
] [ ] [ ][ ] [ ][ ] [ ][ ][
•
=o
− ε•
σ − σ ε•
+ σ (2.46)或
jk kj ik
ik ik ij kj
ij t L
s •
=o
−σ ε•
−σ ε•
+σ結合
t o ij
=t o ji
,σij
=σji
,t o ij
=σo ij
及ij ji
•
•
=εε 的對稱特性,可導出下式
∫ V
(σo ij
−2σik
ε• kj
)δ ε• ij dV
+∫ V
σjk L ik
δL ij dV
=∫ S • f i
δv i dS
+∫ V b • i
δv i dV
(2.47)其中σ
o ij
=σ• ij
−ωik
σkj
+σik
ωkj
。 2.6 材料之彈塑性構成關係式在考慮彈性負荷、塑性除荷或必須考慮殘留應力以及除荷工件之 最後形狀時,彈性變形行為之因素必須加以考慮。塑性變形的特性之 一是受變形歷程影響,一般在解析材料之塑性變形時,皆是採用各瞬
間之應變增量求其與應力之關係之應變增量理論。
利用材料構成關係式,可以決定應力與應變及應變率間之關係。
在虎克定律中,應力
σ
ij與彈性應變ε
mne 滿足下式之關係:e mn ijmn e
ij
=C
εσ (2.48)
其中C
e ijmn
為彈性張量) (
im jn in jm
mn e ij
C ijmn
=λδ δ +µ δ δ +δ δ (2.49)其中λ 與µ為Lame’s 常數。
在考慮物體只承受彈塑性變形時,材料之總應變率 mn
ε
• 可分成彈性應變率
ε
• emn與塑性應變率ε
• mnp ,即mn p e mn
mn
•
•
•
=ε +εε (2.50) 則(2.46)式的變化率為
e mn ijmn e
ij C o
o
= εσ (2.51) 其中
σ
oij =σ
•ij−ω
ikσ
kj+σ
ikω
kj,ε
o ije =ε
• eij−ω
ikε
kje +ε
ikeω
kj。顯然的,只要ε
• mnp 能 決定,則構成方程式即可確定。在獨立的塑性應變硬化率的降伏條件 為0 ) ( ) ( ) ,
(σ
ij
εp
=σ σij
−Y
εp
=f
(2.52) 其中σ(σij
)為Hill的二次降伏函數,] 2
2 2
) (
) (
) (
[
2 2
2
2 2
2 2
xy zx
yz
yy xx xx
zz zz
yy
N M
L
H G
F
σ + σ + σ +
σ
− σ + σ
− σ + σ
− σ
=
σ (2.53)
其中σ稱為等效應力,其目的是將塑性變形問題中的三維應力狀態,
換算為對降伏狀態或應變硬化等效的單向應力狀態,F,G,H,L,M,N 為異向性參數,塑性負荷的廣義流動法則可定義為
ij p
ij
f
ε σ∂ Λ ∂
•
=(2.54)
其中Λ為一大於零的plastic multiplier。
Y 為等向性應變硬化法則,可表示為
n
C p
Y
= (ε0
+ε ) (2.55) 其中p dt
p
=∫
ε•
ε (2.56) Λ
∂ =
∂
= Λ
=
•
•
ij ij p
ij ij
p f
σ σ ε σ
σ σ
ε 1 (2.57)
ε
0
為初應變,ε
p與ε
• p分別為等效塑性應變及等效塑性應變率。降伏 條件的微分式可寫為=0
∂ −
= ∂
•
• p
p ij
ij d
f dY
εσ ε σ
σ
o
(2.58)
配合應變硬化係數,即
d p
H dY
= ε
′ (2.59)
可得Λ =(σ
o ij
/H
′)∂f
/∂σij
,由(2.50)式與(2.51)式可得 )(
mn e mn
ij ijmn f
C
ε σσ ∂
Λ ∂
−
=
•
o
(2.60)其中Λ可表示為