明新科技大學 校內專題研究計畫成果報告
智慧型機器人應用於土木工程檢監測之研究
The Study of Intelligent Robots in Inspections and Monitors
for Civil Engineering
II
ABSTRACT
The infrastructures need to be maintained and rehabilitated all over the world, including highways, bridges, etc. Each year, a great amount of resources is consumed on regular inspections, monitoring and evaluations, in order to properly maintain serviceability of the infrastructures. However, most of the inspection and maintaining processes are routine work, requiring immense man-hours. Therefore, to have a fast and effective automated method on inspections and monitors has become highly important. In this project, we proposed the idea of development of a robot-based inspection and monitor methods. By introducing robotics, sensors, artificial intelligence, an autonomous robot was studied for the feasibility of inspections and monitors for civil engineering via expert interviews. The aspects of demands, techniques, applications, strategies, and restrictions for the application of robots to civil engineering were inducted for further studies. Furthermore, in the light of present shortcomings of pavement inspections, the idea of robot development for pavement inspections was proposed.
圖 目 錄
圖 1-1 研究流程圖 1-3 圖 2-1 1998 至 2003 年主要國家產業用智慧型機器人年銷售量統計 2-4 圖 2-2 1998 至 2003 年主要國家產業用智慧型機器人運作數量累計 2-5 圖 2-3 1998 至 2003 年主要國家產業用智慧型機器人市值預估 2-5 圖 2-4 2002 至 2003 產業用智慧型機器人年裝置數量及 2004 至 2007 預測 2-5 圖 2-5 2003-07 年服務機器人專業領域應用市場現況/預測(裝置數量) 2-7 圖 2-6 2003-07 年服務機器人專業領域應用市場現況/預測(總金額) 2-7 圖 2-7 機器人相關專利成長趨勢圖 2-16 圖 2-8 機器人相關專利所屬國家分析 2-17 圖 2-9 依申請人國籍別區分之機器人專利申請件數 2-17 圖 2-10 依申請人國籍別之申請件數比率之機器人專利申請件數 2-18 圖 2-11 依應用領域別區分之各個申請市場佔有率 2-18 圖 2-12 服務型機器人應用領域(國籍別累積件數) 2-19 圖 2-13 受矚目技術開發主題中累積之申請件數 2-19 圖 3-1 機器人硬體架構 3-2 圖 3-2 機器人感應器:(a)距離測量;(b)方向角測量 3-2 圖 3-3 機器人系統設計示意圖 3-2 圖 3-4 全向輪 3-3 圖 3-5 MicroSoft Robotics Developer Studio (MSRDS)開發環境 3-3圖 3-6 Player/Stage 開發介面 3-4 圖 3-7 機器人於已知地圖之初始位置 3-5
圖 3-8 機器人於運動間之同步定位示意圖 3-6
器人市場需要長時間廣泛收集資訊詳加思考,並與機器人應用領域的專家多方交換意見, 規劃出務實的發展策略與實際可行的施行架構。參酌這些著名機器人研究學者之看法,本 計畫的研究範圍與對象分為兩大領域: 1. 國內外機器人技術現況與未來發展等相關資料的收集與彙整:除掌握產業用與服務用 智慧型機器人的資料外,依據收集文獻,著重於智慧型機器人技術與應用進行深入探 討與評析。 2. 機器人應用於土木工程之檢監測:瞭解目前機器人應用於土木工程之國內外現況,掌 握發展成果外,配合前項文獻資料收集成果,透過辦理「智慧型機器人於營建產業應 用研討會」,將機器人於土木營建產業的研發推展工作按產業需求面、技術發展面、應 用推廣面、執行策略面、問題限制面進行具體列述及探討,俾便彙整作為未來實體機 器人開發時參採。
1.4 研究重要性
近年來政府明確地將機器人研發列為重要政策之一,大力補助機器人相關技術的研究 經費,並以之作為產業界與學術界間的橋梁,促進產官學界的整合,企圖帶動台灣機器人 相關技術的研發,並逐步將智慧型機器人商品化與市場化。我國電子資訊硬體產業在全球 佔有舉足輕重的地位,精密機械與模具產業亦頗具規模,以此為基礎與世界機器人研究接 軌,必可增進國內學術、研究機構與產業界相關研究的深度與廣度,將基礎研究與前瞻技 術作有效整合,並爭取與國外團隊交流合作的機會,加速激盪出創新技術的研發。本計畫 詳細說明機器人的起源與發展歷程,分析國內外機器人的發展現況,由於國內外將機器人 用於土木工程的檢監測與資料收集仍處於啟蒙階段且應用尚未普及,本計畫提出將智慧型 機器人應用於土木工程檢監測之構想,並將與臺灣大學土木工程學系電腦輔助工程實驗室 (Computer-Aided Engineering Laboratory, CAE Lab.)跨校合作的現況作說明。第二章 機器人科技回顧
2.1 機器人定義、起源與發展
一 般 人 對 機 器 人 ( robot ) 這 個 名 詞 的 印 象 與 理 解 通 常 是 指 一 些 類 似 人 形 (anthropomorphic)外觀的機械裝置,例如用於焊接的機器人手臂等。將機器人指稱為具 有人類外觀的概念係源自機器人(robot)本身這個字,其來自於捷克字-robota,可廣義 的譯為僕人般的勞動者(menial laborer)。這個字最早出現於 1921 年 1 月 25 日捷克布拉格 之 Karel Capek 的 R.U.R(Rossum’s Universal Robots-Rossum 的通用機器人),R.U.R 是由 發明家 Rossum 所創造的一種工人,由一堆零件所構成且足夠聰明,能取代特定工作範圍 內的人類,因此稱其具有通用性(universal),Capek 描述該工人為機器人(robota)。隨著 時代演進,機器人工程(robotics)發展突飛猛進,結合其他領域的知識與技術,依據機器 人的智慧化程度發展出許多不同功能與類型的機器人,相關的名稱包含智慧型機器人 (Intelligent Robot, IR)、自主式機器人(Autonomous Robot, AR)與人工智慧機器人 (Artificial Intelligence Robot, AI Robot),以下予以定義之。智慧型機器人(Intelligent Robot, IR)是一種可自主運作的機械性生物,結合機械、 自動化、電機、光學、電子、資訊軟體、通訊、安全系統、創意內容等相關技術,為一高 度技術整合、高關聯性且具備高附加價值的明星產業,為國家經濟與工業整體發展之關鍵 性指標。智慧(intelligent)表示 IR 不會無意識、重複性的運作;機械性生物說明 IR 是以 機械而非生物元件所構成,IR 可透過一部電腦控制所有運作,這部電腦猶如一套神經系統 或大腦,控制 IR 與他所處的世界進行互動,例如移動位置、改變運作模式等。此外,所謂 的自主運作表示 IR 無須倚賴人為操作而可在所有適宜的狀況下自我運行與操作,IR 可自 行適應所處環境的改變並持續達成目標或完成任務,此即所稱之自主性(autonomy)。
讓機械智慧化運作的科學即稱為人工智慧(artificial intelligence, AI),人工智慧機器 人(AI robot)即是將 AI 涵蓋之 7 大議題應用到機器人上,包含:知識呈現(knowledge representation)、理解自然語言(understanding natural language)、學習(learning)、規劃與 問題解決(planning and problem solving)、推論/推理(inference/reasoning)、搜尋(search)、 電腦視覺(computer vision)等。
2.2 國外機器人發展
個國家的綜合科技實力,就智慧型機器人產業整體而言,目前仍值事業化生命週期之萌芽 期(少數產品如真空吸塵機器人與智慧型互動玩具等,可算是己進入成長期),在此階段中, 產業競爭因素主要在於技術能力、價格與服務內容等,隨著 21 世紀的社會結構逐漸轉變, 朝向資訊化、高齡化、孤立化,智慧型機器人產業和資訊科技(Information Technology, IT) 產業、生化產業同為領導未來的主要產業。 全球工業化國家與地區為因應國防軍事、勞動人力成本高漲、高齡化與醫療照護等需 求,無論是政府或廠商皆投入龐大經費進行機器人研發。世界上第一台工業機器人早在 1962 年由美國所研製,機器人的發展至今已有 40 多年,隨著科技技術進步與人類需求日 增,其應用範圍也從早期的工業製造延伸到現今的服務領域,新世代的機器人將不再只是 存在科幻電影中的一個角色,而是真實地以多樣化的形式呈現在現實世界裡。以國外的經 驗而言,美國在機器人 AI 技術方面領先,歐洲具有優良的系統整合技術,日本在機器人 產業的發展已累積了多年的基礎,並擁有全球最大的機器人市場,其在智慧型控制技術上 具有優勢,韓國則將智慧型機器人的發展列為其「次世代新興成長動力產業」之一,利用 其 IT 技術的優勢,以連結網路的 Ubiquitous 機器人,也就是以所謂 UbiBot 為目標全力發 展中,世界各國均發揮其各自的優勢,支援智慧型機器人之研發及產業化。 綜觀世界趨勢,截至目前工業用機器人仍是主流,機器人實際使用層面尚未積極,2005 年在日本愛知縣舉辦的萬國博覽會是近年來服務型機器人發展的一個重要歷程,所包含的 意義除了創新應用技術的展示之外,更顯示了目前機器人的運用已經朝向多元化發展,不 論是醫療照護或是娛樂教育等,讓人們對於機器人的印象從傳統工業用機器手臂演變成人 類型的生活幫手,以下針對產業用機器人與服務用機器人之技術發展與歷程作介紹 [1]。 1. 產業用機器人
圖 2-2 1998 至 2003 年主要國家產業用智慧型機器人運作數量累計 [3]
圖 2-3 1998 至 2003 年主要國家產業用智慧型機器人市值預估 [3]
圖 2-4 2002 至 2003 產業用智慧型機器人年裝置數量及 2004 至 2007 預測 [3]
2. 服務用機器人
具發展潛力的市場,如表 2-3、圖 2-5 至 2-6 [3]所示。 表 2-3 2004 至 2007 年服務機器人預估裝置數量與價值 [3] 裝置數量(單位:部) 總金額(單位:百萬美元) 2003 年當年 度銷售 至 2003 年累 計總數 2004 至 2007 年總數 截至 2003 年 總金額 2004 至 2007 年總金額 537,019 1,320,015 6,703,980 3,794 9,672 圖 2-5 2003-07 年服務機器人專業領域應用市場現況/預測(裝置數量) [3] 圖 2-6 2003-07 年服務機器人專業領域應用市場現況/預測(總金額) [3]
可望進一步的資源整合能讓台灣從「製造優勢」轉型為「創新驅動」,將台灣的智慧型機器 人產業發展迎頭趕上世界舞台。
目前各領域廠商對於智慧型機器人產業的發展皆有高度興趣,其中以資訊與通訊科技 (Information & Communications Technology, ICT)廠商的投入最為積極,由於消費性娛樂 機器人發展迅速,台灣資訊產業藉由過去累積的實力,在感測模組、影音模組、以及各式 整合晶片都有不錯的成績,反觀傳統機械產業除少數投入驅動系統及小型馬達開發外,多 半皆抱持高度興趣但暫且觀望的心態看待機器人產業,以下為針對台灣機械產業跨入智慧 型機器人的發展策略。 從技術面的角度 [8],台灣工具機產業過去發展相當的成功,目前已是全球第四大工 具機輸出國,僅次於日本、德國、義大利,因此藉由工具機發展累積下來的技術能力,台 灣在投入 XY Table 及直角座標系機器人本體之設計製造上是具有競爭力的。由需求面觀 察,過去 3K 產業(為日文簡稱,即骯髒、危險、辛苦的產業)中的一些特定製程皆由人 力完成,然而在國內勞工不願投入、外勞引進又受限制下,未來機器人在此方面的應用確 有需求,且機器人的導入能協助廠商提高競爭力,因此由目前台灣廠商具備的技術以及未 來市場的需求評估,專用化、高可靠度的產業用機器人產品是目前值得切入發展的方向。 過去台灣在多軸產業用機器人的技術一直無法與歐洲、日本等國競爭,若能夠改變現有使 用之思維模式,藉由我國機械業的優勢,避開技術上的競爭,發展專用、機構複雜度低、 高可靠度、適用於嚴苛工作環境下之機器人取代人力,以及低成本、高效率之模組化產業 用機器人,應能找到機器人產業發展的生機。 目前中小型規模企業欲跨入智慧型機器人領域,可透過產業輔導機制,如運用產學合 作計畫、經濟部技術處的業界科專、工業局的主導性新產品開發輔導計畫或是「智慧型機 器人產業發展推動計畫」中協助產品及零組件開發計畫等方式,協助廠商開發機器人相關 產品及技術。在人才培訓上,工業局亦透過機械產業藍領及白領人才培訓計畫,提供業界 智慧型機器人才培訓之管道。此外,工業局及精密機械研發中心(Precision Machinery Research & Development Center, PMC)協助業界於 2007 年成立機器人產業推動協會,並架 設「機器人世界情報網(http://www.robotworld.org.tw/)」網站,提供機器人各類資訊,包 含國內外智慧型機器人最新研究發展及產業動態等內容,建立起廠商交流的平台,有效凝 聚產業界力量,進一步促成各種研發聯盟,建立完整產業供應鏈。
究上仍發揮主導的力量。 由於目前世界許多先進國家非常重視機器人技術的研究,並將此作為一種戰略性高的 技術,美國則將機器人列為警惕技術,認為機器人技術將對未來戰爭產生巨大影響,遂對 其他國家實施技術封鎖。目前,美國和日本為爭奪機器人大眾化時代的主導權展開激烈的 競爭,特別是日本以精密機械工業的競爭力為基礎,正集中開發“與人一起行動”的擬人機 器人(Humanoid),相較之下,美國在開發“可穿戴式機器人”等實用機器人和代替軍人打 仗的軍用機器人方面具有優勢,比起機器人的動作功能,美國更重視開發智慧型機器人, 亦即要讓機器人自己學習,並與人類溝通。例如:人工智慧研究所開發的 Cog 是能夠自己 學習的機器人,Cog 具有簡單的感覺和運動系統,因此能自己學習常識,培養智慧。 全球產業用智慧型機器人的應用市場、研究發展與商品化主要集中在美國、亞洲的日 本與韓國、以及歐洲的德國、義大利、法國、西班牙等地區,與汽車工業的分佈有顯著關 係。由美國專利資料庫的資料獲知,智慧型機器人相關專利成長趨勢如圖 2-7 與圖 2-8 [6], 專利的累計速度隨著時間加速成長,顯見智慧型機器人長久以來受到各國相當的重視,其 未來市場潛力亦可殷切期待。 圖 2-7 機器人相關專利成長趨勢圖 [6]
日本經產省(Ministry of Economy, Trade and Industry, METI)最近在機器人相關專利 的調查中 [9],將機器人定義為「具有操作(Manipulator)機能或移動機能,可取得自身 外部資訊及決定本身行動之機能」,以及「具有通訊(Communication)機能,可取得自身 及外部資訊,以決定自身行動及行動機能」的機械。
產業,隨著服務用智慧型機器人在整體產業的市場佔有率快速提昇,市場需求量大且產品 多樣化。而智慧型機器人產業早已被日本、韓國等列為新興產業,其他各國營建自動化導 入自動化機械已行之有年,運用機器人協助生產、提高效率,並投入大量資金、人力積極 發展,我國更應加速布局並立即投入。
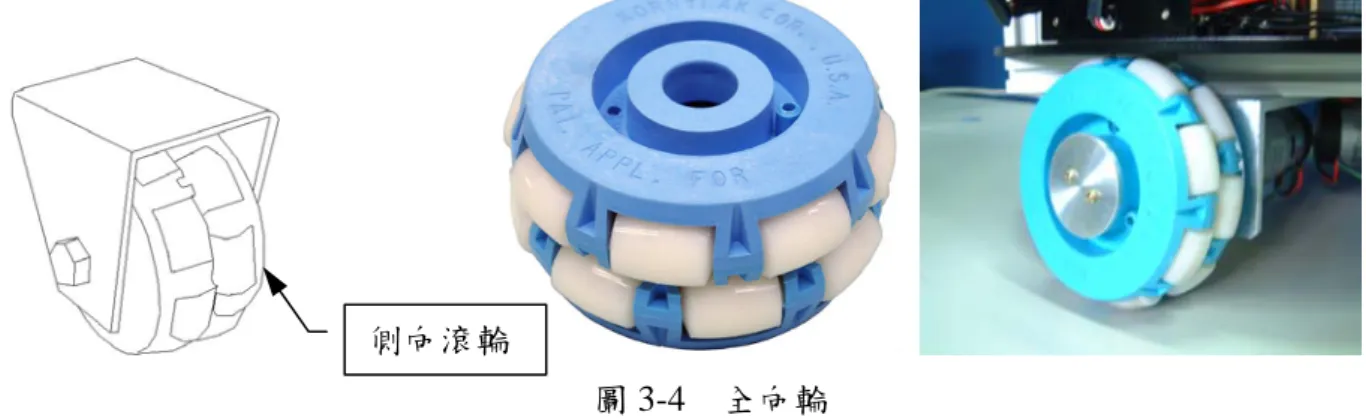
側向滾輪 圖 3-4 全向輪
3.2 虛擬機器人之發展與測試
除實體機器人外,目前已發展完成可供測試及驗證的虛擬機器人,主要目的係預先模 擬實體機器人在未來實際應用時的動作及對環境的反應,對可能發生的狀況預作修正與測 試,不僅能適切掌控機器人的運動狀況,並可將指令傳送給虛擬機器人收集相關數據。目 前 研 究 主 要 以 兩 套 機 器 人 模 擬 與 控 制 系 統 - MicroSoft Robotics Developer Studio 與 Player/Stage-建構完成虛擬平台,進行初步的機器人單機控制,並進階透過網路遠端連線 操控機器人,目前正與土木構造物檢監測系統模組進行整合調整及適用性評估。1. 近 年 微 軟 看 好 機 器 人 產 業 的 成 熟 , 開 發 出 機 器 人 作 業 系 統 - MicroSoft Robotics Developer Studio (MSRDS)(如圖 3-5)-並開放其原始碼,主要功能包括控制軟體與網 頁控制介面、軟體模擬機器人運動等,其內部程式核心為微軟發展多年的 Concurrency and Coordination Runtime(簡稱 CCR)技術,主要功能是可讓機器人同時處理各項感應 器的資訊並及時做出判斷與反應。MRS 同時也提供良好的模擬功能,例如我們可將一 台高精確度的雷射感應器建置於模擬環境中的機器人,即可測試真實機器人真正裝載該 感應器後的施作效率是否具備穩定性與符合使用者需求,再決定購買與否。
(a) 時間一 (b) 時間二
(c) 時間三 (d) 時間四
圖 3-8 機器人於運動間之同步定位示意圖
3.4 發表論文清單
1. Chang, J. R., Kang, S. C., Liu, Peter, Hsieh, S. H., Tseng, Y. H., and Su, Y. S., “Determination of the International Roughness Index (IRI) Using An Autonomous Robot (P3-AT),” 26th International Symposium on Automation and Robotics in Construction
(ISARC 2009), Austin, Texas, U.S., June 24-27, 2009. (abstract submitted)
2. 張家瑞、康仕仲、謝尚賢、陳茂南,「智慧型機器人於營建產業之應用分析」,營建管理 季刊,民國 97 年。(審查中)
3. Gu, K. Y., Liu, P., Chang, J. R., Kang, S. C., and Hsieh, S. H., “Implementation of an Autonomous Robot for Pavement Inspection,” 12th International Conference on Computing
in Civil and Building Engineering & 2008 International Conference on Information Technology in Construction (ICCCBE-XII & INCITE 2008), Beijing, China, October 16-18,
2008, 5 pages (Paper No. 270).
Perform Pavement Inspections,” International Symposium on Automation and Robotics in
Construction (ISARC 2008), Vilnius, Lithuania, June 27-29, 2008, pp. 141-147. (Thomson
Reuters ISI Proceeding database)
第四章 智慧型機器人於土木營建產業之發展方向與策略
營建機器人(construction robotics)屬於服務型機器人,日本於 1970 年代最早提出營 建機器人的概念,目前日本致力於發展全自動化建築機器人 [12]與輔助施工的建築機器人 [13],其他如德國則針對移動性營建機具之控制與監控進行研究,法國工業用機器人協會 (French Association of Industrial Robotics, AFRI)也投入營建機器人的研發。
機器人目前在國內外營建產業的施工及營運中扮演著重要的角色,豐碩的研究成果廣 泛出現在許多相關的學術期刊、技術報告、國際研討會等刊物中。例如,每年由 International Association for Automation and Robotics in Construction (IAARC)統籌,各國輪流主辦的 International Symposium on Automation and Robotics in Construction (ISARC)國際研討會即 為營建機器人的年度盛會。另以 2007 年 4 月份的 Autonomous Robots 期刊 [14]為例,該期 特別針對營建機器人發行專刊,由營建自動化領域頗負盛名的 Thomas Bock 教授撰寫專 文,該期共收錄 10 篇與營建機器人直接相關的學術及技術研發成果。此外,如 Automation
in Construction、Computer-Aided Civil and Infrastructure Engineering 等等著名期刊均納入機
表 4-1 【智慧型機器人於營建產業應用研討會】議程
◎ 會議日期:民國九十七年六月六日(星期五) ◎ 會議地點:明新科技大學土木工程系館一樓多媒體教室(新竹縣 304 新豐鄉新興路 1 號) ◎ 主辦單位:明新科技大學土木工程系、環境資源管理系、工學院產學研發中心 ◎ 合辦單位:國立臺灣大學土木工程學研究所、資訊工程學研究所 ◎ 協辦單位:中國土木水利工程學會資訊委員會 中國土木水利工程學會鋪面工程委員會 社團法人中華鋪面工程學會 時 間 會 程 8:30~9:00 報 到〈領取資料〉 9:00~9:20 開幕致詞: 楊肇政 校長 明新科技大學 貴賓致詞: 童健飛 總工程司 內政部營建署 陳茂南 副組長 交通部運輸研究所運輸工程組 與 談 人: 王傑智 助理教授 臺灣大學資訊工程學系 (按筆畫順序) 周家蓓 教授 臺灣大學土木工程學系 康仕仲 助理教授 臺灣大學土木工程學系 劉寅春 博士 臺灣大學土木工程學系 謝尚賢 教授 臺灣大學土木工程學系 主 持 人: 岳吉剛 總務長 明新科技大學 講 員 主 持 人 9:20~10:10 專題演講 I:營建產業檢測科技發展與新思維 陳茂南副組長 交通部運輸研究所運輸工程組 童健飛總工程司 10:10~10:30 茶 點 時 間 講 員 主 持 人 10:30~11:20 專題演講 II:智慧型機器人之發展 王傑智助理教授 國立臺灣大學資訊工程學系 周家蓓教授 講 員 主 持 人 11:20~12:00 1. 機器人玩家經驗分享 李建興 明新科技大學精密機電工程研究所 2. 智慧型機器人於營建產業之應用與策略分析 劉姵君 明新科技大學營建工程與管理研究所 任復華主任 12:00~13:00 午 餐 時 間 講 員 主 持 人 13:00~14:00 1. 機器人於鋪面檢測之運動規劃 古凱元 臺灣大學土木工程學研究所 2. 保全機器人巡邏路徑規劃 洪偉瀚 臺灣大學土木工程學研究所 3. 趣味表情機器頭顱製作 饒有銘 明新科技大學精密機電工程研究所 張謝淵主任 講 員 主 持 人 14:10~15:10 1. P3-AT 機器人於道路鋪面檢測整合研發 曾源緒 臺灣大學土木工程學研究所 2. 裝載 RTK-VRS 之機器人於鋪面破損檢測之應用 黃遵成 明新科技大學營建工程與管理研究所3. MicroSoft Robostics Studio (MSRS)與機器人平台整合 蘇詠順 臺灣大學土木工程學研究所
王華弘主任
辨識並鑑定破損的狀況及發生位置、跨越障礙物之淨高(overhead obstruction measurement)等,建構長期檢測資料庫,提供道路主管機關鋪面需進行維修時機決 策的研判依據。以機器人進行鋪面檢測時,需考慮機器人在正常交通狀況下的施測 環境挑戰,機器人需能自動駕駛,並配合交通管制或配套的警示措施。 (2) 除了道路施工中的鋪面平坦度檢測外,無論省、縣、鄉道或國道高速公路,常見頻 繁的週期性刨除加鋪工程,機器人可應用於較短里程、高精度檢測需求及完工驗收 中。 (3) 目前的平坦度檢測多採用可高速行駛的慣性式平坦儀(參見第 4.1 節所述),該設備 係透過加速度計的二次積分,來消除車行過程中之震動導致的縱向剖面高程量測誤 差,然而加速度計本身有精度的限制,所以會喪失部分資訊,因此本研究將發展以 機器人為基礎(robot-based)之平坦度量測模式,嘗試摒除加速度計的使用。 (4) 目前的道路檢測多以單一車道為單元,未來可透過機器人的感知設備與智慧性檢測 的彈性及機動性,一次擷取多車道的資訊。 (5) 道路結構性檢測可判斷道路的破壞是否源起於施工不善,抑或是整體路面結構原本 就不佳,並可研判路基是否需要處理等,獲知道路完工後短時間內又產生破壞的原 因。市區道路因環境特殊,多不傾向採用破壞性的結構檢測以免於民怨,一般均採 用落錘式撓度儀(Falling Weight Deflectometer, FWD)配合透地雷達(Ground Penetrating Radar, GPR)的方式,然類似設備相當昂貴,可思考發展以機器人執行 道路結構性檢測的設備。
參考文獻
1. 中華民國海關進出口統計資料庫,http://203.66.210.138/stap/main.asp?lang=2。
2. International Federation of Robotics (IFR), World Robotics Market 2006: http://www.ifr.org/modules.php?name=News&file=article&sid=9, 2008.
3. 國際機器人協會/聯合國歐洲經濟委員會(International Federation of Robotics/ United Nations Economic Commission for Europe, IFR/UNECE)研究報告,2004。
4. 工業技術研究院,智慧型機器人商機可期,民國 94 年 5 月。 5. 工業技術研究院,智慧型機器人的產業化-以韓國為例,民國 95 年 5 月。 6. 國立清華大學科技管理學院科技政策研究報告,台灣智慧型機器人產業發展機會與策 略,經濟部工業局 94 年度專案計畫執行成果報告,民國 94 年 10 月。 7. 國立清華大學科技管理學院科技政策研究報告,智慧型機器人市場需求分析,經濟部工 業局 94 年度專案計畫執行成果報告,民國 94 年 10 月。 8. 石承泰,機器人產業-機械業新契機,精密機械研究發展中心機械資訊,第 607 期,民 國 88-89 年。 9. 工業技術研究院,日本經產省對歐美日機器人專利之調查,民國 96 年 9 月。
10. 工業技術研究院,產業經濟與趨勢研究中心(Industrial Economics & Knowledge Center, IEK)整理,民國 96 年。
11. 臺北國際機器人展(TIROS),http://www.tiros.org.tw/
12. Yukio, H., “Construction Automation and Robotics in the 21st Century,” The International Symposium on Automation and Robotics in Construction (ISARC), Tokyo, Japan, pp. 565-568, 2006.
13. NaitoJunpei, O.N., “Development of a Wearable Robot for Assisting Carpentry Workers,” International Symposium on Automation and Robotics in Construction (ISARC), Tokyo, Japan, pp. 523-526, 2006.
附錄 明新科技大學 97 年度 研究計畫執行成果自評表
計 畫 類 別 : □任務導向計畫 □整合型計畫 ■個人計畫 所 屬 院 ( 部 ) : ■工學院 □管理學院 □服務學院 □通識教育部 執 行 系 別 : 土木工程系 計 畫 主 持 人 : 張家瑞 職 稱:副教授 計 畫 名 稱 : 智慧型機器人應用於土木工程檢監測之研究 計 畫 編 號 : MUST-97 土木-04 計 畫 執 行 時 間 : 97 年 1 月 1 日 至 97 年 9 月 30 日 教 學 方 面 1.對於改進教學成果方面之具體成效: (1) 土木工程:藉由土木工程實務資料的收集與現況研析,配合研討會的辦理,強 化土木工程教學成效。 (2) 智慧型機器人:藉由智慧型機器人實務資料的收集與現況研析,強化土木工程 與機電整合之教學成效。 (3) 國外經驗:研析國外土木工程與機器人成熟經驗,增廣見聞並彙整成果提出建 議以供國內參採。 2.對於提昇學生論文/專題研究能力之具體成效: 本研究係以土木工程及智慧型機器人為研究對象,強調實務資料收集,培養研究 精神,增加研究人員的實務經驗。藉由國內外實務資料收集的過程增廣見聞開拓 視野,以他山之石提供國內借鏡。培養技職校院學生動手收集資料與閱讀判斷的 分析能力,實際體現實務與理論並重之教學方針,奠定學生日後對整合土木工程 與智慧型機器人領域整合之進階研究基礎。 4. 其他方面之具體成效: 引進國外先進智慧型機器人的成功研發經驗,應用於傳統的土木工程檢監測領 域,並提出實施計畫與使用策略,可獲知其實際效益。計
畫
執
行
成
效
學 術 研 究 方 面 1.該計畫是否有衍生出其他計畫案 □是 ■否 計畫名稱: 2.該計畫是否有產生論文並發表 ■已發表 ■預定投稿/審查中 □否(1) Chang, J. R., Kang, S. C., Liu, Peter, Hsieh, S. H., Tseng, Y. H., and Su, Y. S., “Determination of the International Roughness Index (IRI) Using An Autonomous Robot (P3-AT),” 26th International Symposium on Automation and Robotics in
Construction (ISARC 2009), Austin, Texas, U.S., June 24-27, 2009. (abstract
submitted)
(2) 張家瑞、康仕仲、謝尚賢、陳茂南,「智慧型機器人於營建產業之應用分析」, 營建管理季刊,民國 97 年。(審查中)
(3) Gu, K. Y., Liu, P., Chang, J. R., Kang, S. C., and Hsieh, S. H., “Implementation of an Autonomous Robot for Pavement Inspection,” 12th International Conference on
Computing in Civil and Building Engineering & 2008 International Conference on Information Technology in Construction (ICCCBE-XII & INCITE 2008), Beijing,
China, October 16-18, 2008, 5 pages (Paper No. 270).
學 術 研 究 方 面
Automation and Robotics in Construction (ISARC 2008), Vilnius, Lithuania, June
27-29, 2008, pp. 141-147. (Thomson Reuters ISI Proceeding database)

![表 2-1 世界各國產業用機器人現況及 2009 年預估值 [2] 每年的組裝數量 每年終的可運作存量 國家 2004 2005 2006 2009 2004 2005 2006 2009 美洲 15,400 21,555 17,200 20,100 126,961 143,203 153,500 182,500 巴西 208 320 2,352 2,672 北美(加拿大、墨西哥、美國) 15,170 21,136 16,500 19,100 123,663 139,55](https://thumb-ap.123doks.com/thumbv2/9libinfo/9022672.308530/13.892.118.851.103.1205/年預估值每年組裝數量每年終可運作存國家美洲巴西北美加拿大墨.webp)
![圖 2-4 2002 至 2003 產業用智慧型機器人年裝置數量及 2004 至 2007 預測 [3]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9022672.308530/15.892.258.721.735.1030/圖2422至23產業用智慧型機器人年裝置數量及24至27預測.webp)
![表 2-4 機械工業重點項目產值與發展目標 [6] 產值(億元新台幣) 產業別 94 年 97 年 發展目標 智慧型機器人 140 630 102 年產值達 6,000 億元 101 年前成為世界前三大服務用智慧型機器人製 造國,全球市場佔有率 10% 平面顯示器設備 100 600 降低建廠成本,提昇技術層次,塑造發展優勢 提昇自給率達 50%,提昇產業競爭力 精密工具機 720 1,450 全球前四大精密工具生產國家 全球精密工具機 ODM/OEM 最大製造基地 產業機械](https://thumb-ap.123doks.com/thumbv2/9libinfo/9022672.308530/19.892.135.831.109.671/新台幣智慧型顯示器設降低建廠成本提昇技術層次塑造發展提昇機械.webp)

![表 2-8 我國機器人進口前五大國家(單位:千美元) [1] 國家 2001 2002 2003 2004 2005 2006 2007 上半季 國別統計 日本 88,511 84,694 157,971 267,283 211,972 226,195 108,377 1,145,007 美國 35,416 29,181 16,018 16,166 12,219 15,357 12,400 136,759 德國 5,503 6,089 9,875 16,795 8,352 24,762](https://thumb-ap.123doks.com/thumbv2/9libinfo/9022672.308530/25.892.176.800.107.375/我國機器人進五大國家單位千美元國家上半季國別統計日本美國德國.webp)
![圖 2-8 機器人相關專利所屬國家分析 [6] 1. 申請人國籍別申請件數的演進 1999 年至 2004 年歐、美、日三地的機器人相關專利申請件數,以日本的申請件數 最多,每年申請件數平均在 2,000 件左右;美國居次,每年約 500 件;歐洲第三,每年 約 400 件;其他國家則佔少數,如圖 2-9 [9]。 圖 2-9 依申請人國籍別區分之機器人專利申請件數 [9] 2](https://thumb-ap.123doks.com/thumbv2/9libinfo/9022672.308530/27.892.223.749.74.357/人相關專利申請件數以日本申請件數最多每年申請件數平均三每年.webp)
![表 2-10 機器人受矚目技術一覽表 [10] 受矚目技術 選定之理由 步行技術 日本引領全球技術走向。在複雜環境中的移動是個 人機器人、或追求擬人化之娛樂機器人的重要技術。 自律移動控制技術 在複雜、多變的生活環境或災害現場等特殊環境、非製造業、個人領域中,機器人能夠自律移動是重 要的技術。在清掃、警備機器人己有實用化的案例。 學習型演算技術 雖然歐美領先實行,近年也能看到日本對此的進展,此項技術在以複雜、多變環境中作業為對象之 個人機器人是重要的。 多台機器人的控制技術 用於救災、探查](https://thumb-ap.123doks.com/thumbv2/9libinfo/9022672.308530/30.892.170.798.97.1014/一覽表目技術日本引領實用案例學習型演算技雖然歐美領先實行探查.webp)