車輛感測網路中資料傳輸最佳化
47
0
0
全文
(2)
(3)
(4) 車輛感測網路中資料傳輸最佳化 指導教授:歐家和 研究生:沈傳雄. 摘要 近年來,隨著車輛感測網路已成為一個熱門的新議題,在新一代的車輛上也裝載 感測裝置。在車輛感測網路中,資料傳輸方式是一個重要的研究議題。傳統的資料傳 送方式大部分都是single-hop,如果要multi-hop方式傳送會因為無法正確的知道車輛 位置導致封包氾濫和能源消耗等問題。在車輛感測網路資料傳輸機制當中,已經有基 於sink或廣播方式的傳輸方法。儘管如此,以sink的資料傳送方式需要耗費相當大的 成本建置大量的基礎設施,而廣播的方式仍然會產生大量的資料封包。為了解決這些 問題,本論文提出一種在車輛感測網路中資料傳輸最佳化的方法。本論文提出的方法 中,每一個感測裝置都會建立車輛移動路徑表,透過不斷的更新建立一條最佳的移動 路徑來記錄車輛的移動。本論文利用網路模擬器ns-2分析並與其他方法比較。模擬結 果顯示本論文的方法在延遲率及產生的資料封包皆有較好的表現。. 關鍵字:車輛感測網路、multi-hop、資料傳輸、車輛移動路徑表。. i.
(5) Data Delivery Optimization in Vehicular Sensor Networks Chuan - Shiung Shen Department of Computer Science & Information Engineering National Pingtung Institute of Commerce. Abstract Vehicular Sensor Networks (VSNs) has recently become a hot topic in next generation of vehicles equipped with sensor nodes. Data delivery is an important research issue in VSNs. Most of the traditional data delivery mechanisms use single-hop delivery. With multi-hop data delivery, heavy energy consumption and packet flooding problem appear because correct vehicle’s position information is unable to obtain. Several sink-assisted or broadcasting delivery methods have been proposed for data delivery in VSNs. However, the sink-assisted scheme requires a considerable cost to build infrastructure. On the other hand, the broadcasting method produces large amounts of data packets. To solve the problem, this thesis presents a data delivery optimization scheme in VSNs. In the proposed method, each sensor node creates vehicle movement path table and records the movement of vehicles by continuous updates to create an optimal mobile path. The proposed scheme is evaluated and compared to existing solutions by the ns-2 network simulator. The simulation results show that the proposed scheme has better performance in transmission delay and generates less number of data packets. Keyword: vehicular sensor networks, multi-hop, data delivery, vehicle movement path.. ii.
(6) 誌謝 研究所求學的這段時間,轉眼間兩年就過去了,在這段求學過程中, 我最要感謝的人是我的指導教授歐家和老師,在老師的悉心教誨下,除 了學習知識外,更重要的是教導做事情和面對困難時該有的態度,而不 是遇到挫折就一昧的逃避。在研究過程中,老師提供了許多相關的寶貴 知識與經驗,當我遇到困難時總是不厭其煩的細心教導並指引正確的方 向,使我受益良多,讓我可以順利的完成研究所學業取得碩士學位,在 此謹致上最誠摯的感謝。再來要感謝本篇論文口試委員張文智教授和趙 志峯教授於論文口試中細心審閱,提供了許多寶貴的意見與指導,並在 論文細節部份提供許多建議,在此由衷感謝。 另外要感謝無線網路實驗室的同學洪林在、朱健賓、魏孝安以及學弟 林哲甫,在實驗室這段時間裡共同經歷求學的日子裡有苦也有樂,因為 有你們的陪伴,讓我待在實驗室的生涯更加有趣、豐富。 最後感謝我的家人在背後一直默默的支持與鼓勵,讓我可以無後顧之 憂全心全意的專注在學業中。還有許多關心我的朋友,謝謝你們的加油 與鼓勵。. iii.
(7) 目錄 摘要 .................................................................................................................... i Abstract ............................................................................................................. ii 誌謝 .................................................................................................................. iii 目錄 .................................................................................................................. iv 表目錄 .............................................................................................................. vi 圖目錄 ............................................................................................................. vii 第一章 緒論 ..................................................................................................... 1 1.1. 研究背景 .......................................................................................... 1. 1.2. 研究動機 .......................................................................................... 4. 1.3. 論文架構 .......................................................................................... 5. 第二章 相關研究 ............................................................................................. 6 第三章 資料傳輸最佳化路由協定設計 ....................................................... 10 3.1. 系統環境與假設............................................................................ 10. 3.2. 最佳化路由協定設計.................................................................... 11. 3.3. 資料傳輸最佳化............................................................................ 16. 第四章 模擬與效能評估 ............................................................................... 19 4.1. 模擬環境 ........................................................................................ 19. iv.
(8) 4.2. 效能分析與模擬結果.................................................................... 21 4.2.1. 感測節點傳送資訊給車輛 ................................................. 21. 4.2.2. 車輛想請求某一地區的資訊 ............................................. 28. 第五章 結論與未來展望 ............................................................................... 32 參考文獻 ......................................................................................................... 34. v.
(9) 表目錄 表 3.1 Vehicle Movement Path Table.............................................................. 12 表 4.1 模擬環境參數 ..................................................................................... 20. vi.
(10) 圖目錄 圖 3.1 車輛在感測區域內 ............................................................................. 11 圖 3.2 最佳化車輛移動路徑 ......................................................................... 12 圖 3.3 最佳化車輛移動路徑鏈結 ................................................................. 13 圖 3.4 建立車輛移動路徑最佳化 ................................................................. 16 圖 3.5 緊急訊息傳送 ..................................................................................... 17 圖 3.6 請求訊息傳送 ..................................................................................... 18 圖 4.1 感測節點傳送資訊給車輛,單一節點總延遲時間......................... 21 圖 4.2 感測節點傳送資訊給車輛,多個節點平均封包遺失率................. 22 圖 4.3 感測節點傳送資訊給車輛,多個節點平均延遲時間..................... 23 圖 4.4 感測節點傳送資訊給車輛,控制封包總數..................................... 24 圖 4.5 每輛車平均延遲時間 ......................................................................... 24 圖 4.6 感測節點傳送資訊給車輛,相同地區平均封包遺失率................. 25 圖 4.7 感測節點傳送資訊給車輛,相同地區平均延遲時間..................... 26 圖 4.8 感測節點傳送資訊給車輛,不同地區平均封包遺失率................. 27 圖 4.9 感測節點傳送資訊給車輛,不同地區延遲時間............................. 27 圖 4.10 車輛想請求某一地區的資訊,平均封包遺失率........................... 29 圖 4.11 車輛想請求某一地區的資訊,平均延遲時間 ............................... 29. vii.
(11) 圖 4.12 車輛想請求某一地區的資訊,資料封包總數............................... 30 圖 4.13 車輛想請求某一地區的資訊,控制封包總數............................... 31. viii.
(12) 第一章 緒論 1.1 研究背景 近 年 來 無 線 通 訊 及 短 距 離 通 訊 技 術 ( Dedicated Short Range Communication,DSRC) [1]的進步使得車輛開始結合行動隨意網路,稱 為車載隨意無線網路(Vehicular Ad Hoc Networks,VANETs) [2]。車載 隨意無線網路所採用協定為 IEEE 802.11p [3]與IEEE 1609 [4],並且採用 5.9 GHz頻率來進行資料傳輸。隨著 車載隨意無線網路的技術已逐漸成熟, VANETs開始裝載傳統的無線感測網路(Wireless Sensor Networks,WSNs) [5][6],稱為車輛感測網路(Vehicular Sensor Networks,VSNs) [7]。車 輛感測網路是藉由車輛或道路上的感測裝置來感測及收集道路上的各種 情況,傳統的WSNs屬於靜態網路且資料在預設情況下才會收集和發送。 例如,當森林溫度達到預設門檻值,感測裝置將開始收集和發送資訊給 森林管理員,告知森林管理員可能發生森林火災。相較於傳統的WSNs, 感測節點是固定不動,而VSNs屬於動態網路且不受到記憶體、能源、運 算、儲存的限制,並且每輛車之間的隨意移動,能夠產生大範圍的車輛 感測網路,車輛彼此之間能形成通訊網路以便將感測到的資料能夠快速. 1.
(13) 的傳送。透過VSNs可以提供駕駛人一個更舒適、安全、有效率的駕駛環 境,已逐漸成為熱門研究的新議題。 由於目前硬體設備的進步使得感測裝置 體積縮小、成本降低、易於 安裝和供電容易等特性,使得 目前市面上許多車輛及道路上都已裝載感 測裝置。VSNs能夠被建立於VANETs之架構上,藉由配置的車輛與道路 感測裝置,主要建立在 兩個主要架構上,分別為車輛與車輛的互相通訊 ( Vehicle-to-Vehicle Communication,V2V),車輛與道路設備的通訊 (Vehicle-to-Infrastructure Communication,V2I)或道路設備與車輛的通 訊(Infrastructure-to-Vehicle Communication,I2V) 。V2V架構允許車輛之 間在沒有基礎設施的情況下進行隨意通訊(Ad Hoc Communication), 而 V2I及I2V架構允許車輛和路側設備之間進行資料交換。透過 V2V或V2I 的方式車輛能夠將感測到的資訊傳送給鄰近車輛或道路感測裝置,而道 路感測裝置也能夠透過I2V的方式將資料傳送給鄰近車輛,其中包括了社 會治安、環境汙染 [8]、停車資訊、路況、路面坑洞 [9] 和緊急事故等等。 下面列出幾個VSNs應用的場景包括: 社會治安:有鑑於目前犯罪者和交通違規的猖狂,以及車輛失竊率逐 年上升,社會案件一旦發生,警察可以請求道路感測裝置或道路上的 車輛幫忙收集交通影像中的車牌和車輛特徵,藉由影像中的車牌和車 輛特徵來追查罪犯者車輛並預測逃逸路線,除此之外也能夠利用 2.
(14) VSNs協尋失竊車輛的下落。 環境汙染:隨著地球暖化以及環境污染日益嚴重,環保署透過VSNs 來收集不法業者排放廢氣的證據並舉發。例如,車輛行駛在道路上偵 測到工廠所排放的廢氣,車輛將收集到的污染資訊轉送至環保稽查車 或環保署,環保署就能依車輛所傳送的污染資訊給予業者懲處。 停車資訊:在停車場的出入口處安裝感測裝置,感測裝置能夠藉由出 入車輛計算目前是否有空位並提供停車資訊給有需求的駕駛人。 即時路況:VSNs可以提供駕駛者目前道路的資訊。車輛發出請求, 道路感測裝置可以收集並提供即時的道路資訊給駕駛者,塞車事件一 旦發生,曾經請求資訊的駕駛人能夠在第一時間收到塞車資訊。 緊急事故:當緊急事故的發生,車輛可以接收到緊急事故地區的感測 裝置所發出的緊急訊息,駕駛接收到訊息可以提前繞道,避免造成道 路壅塞讓救護人員能快速的到達目的地作醫療處理。 路面坑洞:路面坑洞是交通安全的一大隱憂,不管是天災或人為因素 所造成的坑洞。車輛行駛在道路上一旦偵測到道路坑洞,能夠立即將 坑洞座標位置傳送給道路感測裝置和其他車輛,道路感測裝置再將坑 洞位置轉送至養護工程處來處理坑洞。如果能即時提供坑洞的位置資 訊,讓駕駛人能提前得知坑洞訊息就能減少因坑洞所造成的車禍。. 3.
(15) 1.2 研究動機 在現今的車輛感測網路中,車輛能主動分享感測資料給附近的車輛或 路側設備,但是這些感測資料只能 single-hop 傳送 [10][11][12],假如需 要 multi-hop 傳送會產生大量的資料封包和能源消耗,傳送的資訊或車輛 變多就會造成頻寬壅塞,有重要資訊想要傳送給車輛,將因為網路壅塞 造成延遲時間提高及封包碰撞等問題,最嚴重的情形可能導致封包根本 無法送達車輛。 有幾個重要議題需要被探討,由於無法正確的知道車輛的位置,在不 知道車輛位置的情況下如果以Flooding [13]或擴散的方式傳送,雖然可以 找到車輛,但會產生大量的資料封包,可能會導致頻寬壅塞和 感測裝置 壽命縮短,所以如何將其他車輛或道路感測裝置所感測收集到的資料能 快速、準確並可靠的傳送給車輛是一個非常重要的議題在車輛感測網路 中。 在 2011 年,Hourani 等 [16]以及在 2010 年,Joe 和 Shin [15]所提出 的利用 sink 來傳輸感測資料,但是要完成這種方法的基礎設施不簡單, 需要耗費相當大的成本來架設 sink。在 2010 年,Lim 和 Ko 提出的利用 multi-hop 資料收集方法 [14],再由 replication node 廣播找尋車輛,雖然 這種方法不需要大量的成本即可建置完成,但此種方法會伴隨著廣播風 暴的產生。 4.
(16) VSNs 的拓樸變化快速且頻繁,需要有合適的方法來減少連結中斷的 發生,以確保資料能有效的傳送至目的地或車輛是非常重要的。為了能 找出最佳的連結,本篇論文提出的資料傳輸最佳化是利用道路上所佈署 的 感測裝置 來記錄車輛移動路徑,所以不需要太多的sink或基地台等大 型基礎設施即可建置完成。每輛車廣播自己位置資訊給車輛所在地區內 的道路 感測裝置 ,道路 感測裝置 收集完車輛資訊之後立即建立“車輛移 動路徑表”,並且透過不斷的更新建立一條最佳的車輛移動路徑。如果 車 輛上的感測裝置察覺車輛產生碰撞並確定車禍的發生,透過無線通訊設 備將感測到的緊急訊息廣播給鄰近車輛和道路感測裝置,道路感測裝置 透過 車輛移動路徑表將 資料轉送至交通控制中心或其他車輛,讓其他駕 駛人能及時提前繞道或避免行駛到事故地區,而交通控制中心能夠緊急 通知醫療中心做及時醫療處理。不僅如此,當車輛發出請求資訊,感測 裝置可以藉由車輛移動路徑表將資料快速的送達車輛。由於 最佳化路徑 的建立,可以掌握車輛正確的位置,所以能夠大量減少碰撞、縮減延遲 時間和廣播風暴等問題。. 1.3 論文架構 本論文架構如下:第二章討論了其它相關的研究;第三章提出資料傳 輸最佳化路由協定;第四章為模擬與效能的評估;最後第五章為結論與 未來。 5.
(17) 第二章 相關研究 這一章節主要介紹車輛感測網路上已經被提出來 的資料收集技術和 資料傳送的方法。 在 2006 年,Lee 等所提出的 MDHP 資料收集和擴散技術,主要用於 都市監控藉由 V2V 的架構 [10]。在 MDHP 中車輛有能力收集和分享感 測資料給鄰近的車輛使用摘要擴散(Summary Diffusion) 。首先,車輛將 自己感測到的資料或接收到來自鄰居所傳送的資料儲存在自己的 local summary databases,直到車輛遇到下一輛車時以機率法則擴散感測到的資 料。MDHP 可以透過鄰居來將資料摘要擴散出去以達到 multi-hop,但是 會照成封包泛濫。 在 2010 年,Lim和Ko所提出的利用multi-hop方式找尋目的地,再用 replication node廣播將傳送資料給車輛並建立replicas node [14]。當車輛想 要知道某一地區的資訊,車輛首先查詢鄰居列表並找尋最靠近車輛的 感 測節點 將請求封包轉送給它,最靠近車輛的 感測節點 接收到請求封包時, 立即宣布自己為replication node並修改請求封包,將自己的ID和位置加入 至請求封包中。每一個接收到請求封包的 感測節點 將會查詢鄰居列表並 計算最靠近目的地的鄰居並轉送給它,直到找到目的地為止。當請求封 6.
(18) 包抵達目的地節點,目的地節點收集完資訊之後,將會查詢鄰居列表並 計算最靠近replication node的鄰居並轉送給它,每一個節點重複上面所描 述的動作,直到找到replication node為止。當資料抵達replication node之 後,replication node立即計算TTL,TTL表示為需要廣播的次數。replication node依照計算出的TTL來廣播,並且在這個網路中建立replicas node,當 其他車輛也想知道相同地區的資訊可以透過replicas node知道目的地的資 訊,節省找尋目的地的時間。透過replication node廣播找尋車輛,可以節 省基礎建設的費用,不需要大量的sink只需 感測節點 即可完成,但是有 個嚴重的問題,由於不知道車輛的位置,只依照廣播的方式來找尋車輛 並建立replicas node會導致廣播風暴。 在 2010 年,Joe和Shin所提出的利用sink node來傳送資料以達到低耗 能的目的,此方法建立在LEACH和NEMO架構上 [15]。每一輛車都安裝 上數個 感測裝置 ,可以將車輛視為行動叢集(Mobile Cluster)。行動叢 集成員(Mobile Cluster Members)將感測到的資料傳送至行動叢集首 (Mobile Cluster Head),再由行動叢集首匯集之後統一發送。車輛每移 動到新的sink node所管理的感測網路地區,將會接收到感測網路中的叢集 首所傳送的beacon message,包括sink ID和感測網路ID。車輛接收到之後 必須產生新的ID,新產生的ID必須包括sink ID和感測網路ID,並且車輛 可以自由選擇註冊其中一個sink node作為它的home sink node。當車輛移 7.
(19) 動至新的sink node所管理的感測網路地區,必須將最新產生的車輛ID傳 送給新的sink node,新的sink node將會傳送車輛最新產生的ID給車輛的 home sink node,home sink node可以藉由車輛的ID知道車輛目前的位置, 因為知道車輛的位置,所以可以直接透過網際網路直接傳送資料給車輛 目前所在的sink node,再由車輛所在的sink node轉送至車輛。然而,其它 sink node不可能知道車輛全部的移動路徑,但是每一個sink node會記錄車 輛的移動路徑至移動路徑表,所以透過移動路徑表能夠預測車輛目前的 位置和判斷車輛的下一個sink node。當sink node有資料要傳送給車輛, sink node可以透過移動路徑表快速的找到車輛。雖然透過sink node的記錄 方式和LEACH叢集首的概念,能夠達到最低耗能,並且資料傳輸過程中 不會造成廣播風暴,但是現實環境中由於成本的關係,不可能有那麼多 的sink node來管理。 在 2011 年,Hourani 等所提出的將車輛分為 active node 和 passive nodes, passive nodes 將感測資料傳送至 active node,active node 匯集之後統一發 送至 sink node [16]。首先,將道路分成好幾個小區段,每一個小區段的 兩端部屬 sink node,並且藉由車輛來收集交通資訊。其次,sink node 會 儲存每一輛進入小區段的車輛,直到車輛數目達到預設的門檻值,當車 輛數目達到門檻值,sink node 將會從這些車輛之中隨機選擇一台作為 active node,active node 一旦選擇完成,將廣播通知其他車輛(passive nodes) 8.
(20) active node 的 ID,所以其他車輛必須知道小區段中的 active node,並且 傳送感測到的交通資訊給 active node。最後,active node 匯集並處理完資 訊之後,假設下一個 sink node 距離太遠,active node 會先保留資訊直到 下一個 sink node 在 active node 通訊範圍內再傳送,當下一個 sink node 接收到,立即傳送最新交通資訊給前一個 sink node 更新小區段的交通資 訊,並且發送最新的交通狀況給即將進入小區段的車輛。雖然藉由 active node 可以減少廣播風暴的產生,但是車輛不能隨意更改行車路線,駕駛 人只能依照既定路線行駛,不能依突發狀況隨意更改行車路線,導致駕 駛人非常不方便,而且現實環境由於成本因素不可能有這麼多的 sink node 來管理。. 9.
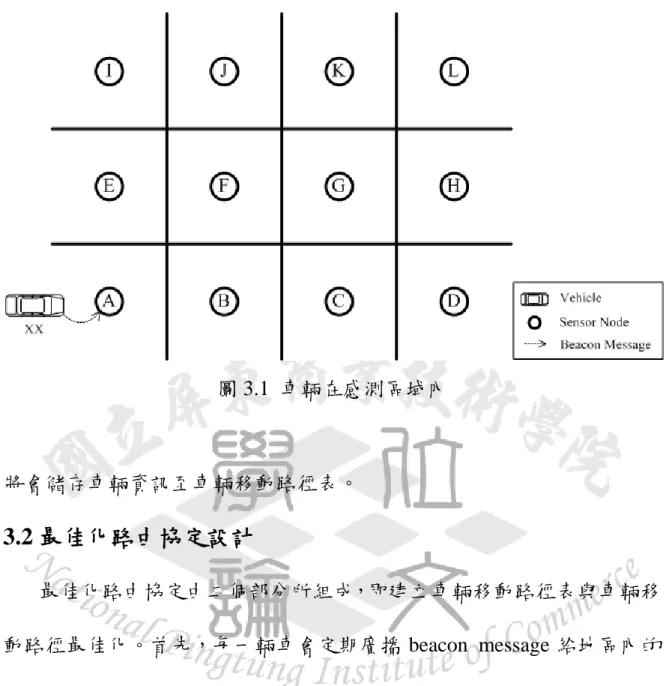
(21) 第三章 資料傳輸最佳化路由協定設計 3.1 系統環境與假設 本論文將道路分成好幾個地區,每一 個地區的大小都是固定相同的, 每一個地區的中心都只需佈署一個感測節點就能管理區域內的工作,不 僅能夠收集資料,也可以當車輛有所請求時將收集到的資訊傳送給車輛。 每一個地區中的感測節點一開始佈署完成之後,會建立自己的車輛移動 路徑表,並且彼此之間立即廣播一次 HELLO message 來建立鄰居列表。 每一輛車與每一個地區內的感測節點能夠透過全球定位系統(Global Positioning System,GPS) [17]接收器來獲取本身的地理位置。每一輛車 上都有裝載感測節點和無線網路裝置。車輛在道路行駛,藉由全向性天 線廣播 beacon message 給車輛所在地區內的感測節點。車輛所在地區內 的感測節點藉由車輛所廣播的 beacon message 儲存車輛資訊至車輛移動 路徑表中。在車輛移動路徑表中如果在特定時間內沒有更新這輛車的資 訊,這輛車的資訊將被刪除。然而,因為現實的環境中的成本因素的考 量,這個感測網路環境中可能只有由一個 sink 或沒有 sink 來管理。如 圖 3.1 所示,每一個地區中心都佈置一個感測節點(A~L)來管理自己地 區內的工作。當車輛 XX 廣播 beacon message 給感測節點 A,感測節點 A 10.
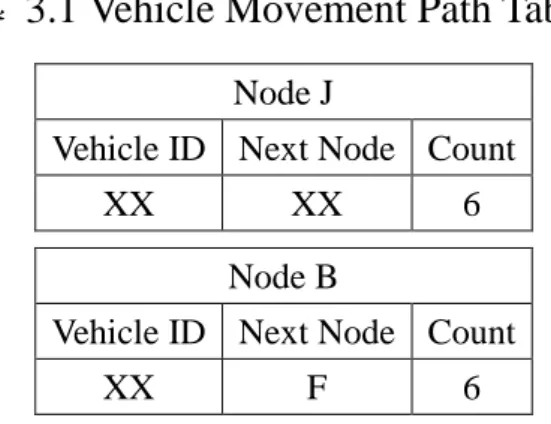
(22) 圖 3.1 車輛在感測區域內. 將會儲存車輛資訊至車輛移動路徑表。. 3.2 最佳化路由協定設計 最佳化路由協定由二個部分所組成,即建立車輛移動路徑表與車輛移 動路徑最佳化。首先,每一輛車會定期廣播 beacon message 給地區內的 感測節點,感測節點接收之後立即廣播 advertisement message 給鄰居感測 節點。透過訊息交換之後,感測節點建立自己的車輛移動路徑表。如表 3.1 所示,Vehicle ID 表示車輛 ID,Next Node 表示感測節點下個要傳送 的目標,Count 表示車輛行駛經過幾個地區。最後,每一個地區中的感測 節點藉由 control message 更新車輛移動路徑表將車輛移動路徑最佳化。 透過車輛移動路徑最佳化,將能夠知道車輛移動的最佳距離。如圖 3.2 所. 11.
(23) 表 3.1 Vehicle Movement Path Table Node J Vehicle ID Next Node Count XX. XX. 6. Node B Vehicle ID Next Node Count XX. F. 6. 示,當車輛 XX 由 G 地區移動到 F 地區時,B 地區感測節點藉由 F 地區 感測節點所廣播的訊息更新車輛 XX 的車輛移動路徑表。將可以將圖 3.2 簡化成圖 3.3 中的車輛移動路經最佳化鏈結,透過這條鏈結不管車輛如何 移動,都能找出車輛的最佳路徑。. 圖 3.2 最佳化車輛移動路徑. 12.
(24) 圖 3.3 最佳化車輛移動路徑鏈結 在車輛行駛中,車輛會定期的廣播 beacon message,包括車輛的 ID, 車輛的位置,車輛的 Count(初始為零)和地區感測節點的 ID(初始為 null)。地區中的感測節點接收到立即判斷車輛是否在自己地區內,並且 訊息不重複(判斷訊息內容是否重複,藉由地區感測節點的 ID 與車輛所 傳送的地區感測節點的 ID 封包內容是否相同) 。如果訊息不重複,首先 , 檢查車輛移動路徑表中是否有這輛車的資訊,如果沒有這輛車的資訊則 加入這輛車的資訊至車輛移動路徑表中, Next Node 為車輛 ID,車輛的 Count 加 1,車輛資訊建立完成立即回傳 ACK message 給車輛,包括已更 新過的車輛 Count 和感測節點 ID,車輛接收到 ACK message 會將地區感 測節點的 ID 更改為接收到的感測節點 ID 並更新 Count。最後,車輛所在 地區感測節點廣播 advertisement message 給鄰居的感測節點,包括感測節 點 ID , 車 輛 ID 和 已 更 新 過 車 輛 的 Count , 鄰 居 感 測 節 點 接 收 到 advertisement message,會將這輛車的資訊加入至自己的車輛移動路徑表 中,並且將 Next Node 更改為廣播這輛車資訊的感測節點。當車輛行駛至 下一個地區時,由於感測節點已有這輛車的資訊,所以直接將車輛移動 路徑表中的 Next Node 更改為車輛 ID 和 Count 加 1,更新完之後廣播. 13.
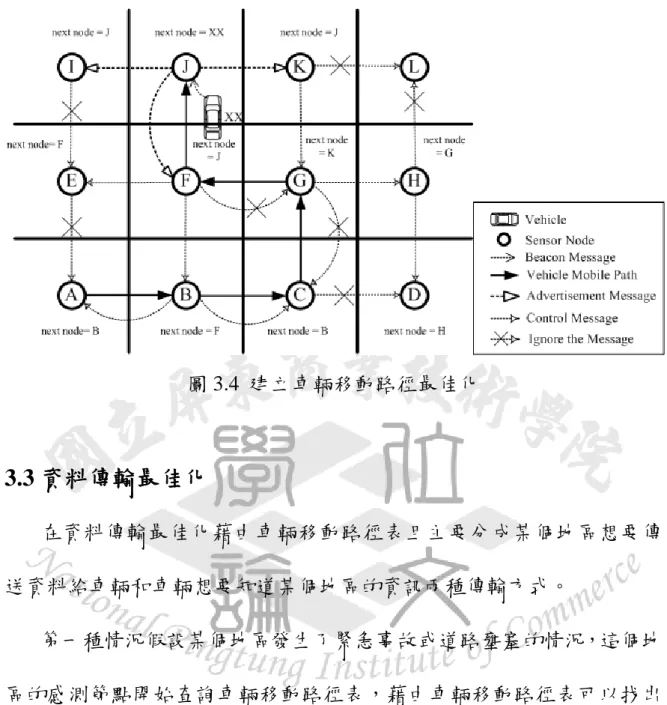
(25) advertisement message。重複上面所描述的動作,車輛行駛經過的地區和 鄰居都能擁有車輛的資訊。 如果需要最佳的距離且最快的時間找到車輛,只有車輛行駛經過的地 區和鄰居擁有車輛的資訊是不足夠的,所以必須將車輛移動路徑最佳化。 在車輛移動路徑最佳化中,感測節點接收到來自鄰居所廣播的 advertisement message。首先,更新自己的車輛移動路徑表,更新完畢之 後隨機等待時間再廣播 control message,包括車輛 ID,車輛的 Count 和 感測節點 ID 給自己的鄰居,接收到 control message 的鄰居,立即檢查自 己的車輛移動路徑表是否有這輛車的資訊,如果沒有這輛車的資訊直接 忽略這個封包,如果有這輛車的資訊將比較這輛車的 Count 大小,Count 值如果比傳送過來的值小,將車輛移動路徑表中這輛車的 Next Node 更改 為廣播這輛車資訊的感測節點並更新這輛車的 Count 值。最後,當這輛 車的 Next Node 及 Count 值更新完畢,感測節點再次廣播 control message 給自己的鄰居來比較這輛車的 Count 值。重複上面所描述的動作,直到 沒有這輛車的資訊,或者接收到的 Count 值不大於自己所擁有的 Count 值,將停止廣播。演算法 1 表示最佳化路由協定。如圖 3.4 中所示,當車 輛由 F 地區移動至 J 地區時,J 地區感測節點廣播 advertisement message 給鄰居 I、K、F,I、K、F 接收到之後立即廣播 control message 給自己的 鄰居,鄰居再次廣播 control message 直到沒有這輛車資訊或已更新過。 14.
(26) Algorithm 1 Vehicle movement path optimization algorithm 1: 2: 3:. Each vehicle broadcast a periodical beacon message region sensor node collect information from vehicle. 4: 5:. if vehicle is within my region and this information is not same then check whether the vehicle movement path table already has this vehicle or not. 6: 7: 8: 9:. if YES then update the vehicle movement path table and Count add 1 delivery ACK message to the vehicle broadcast an advertisement message. 10: 11: 12: 13:. else add the vehicle information to vehicle movement path table and Count add 1 delivery ACK message to the vehicle broadcast an advertisement message. 14: end if 15: neighbors receive advertisement message 16: update the vehicle movement path table 17: broadcast a control message 18: neighbors receive control message 19: check whether Count is larger than my Count or not 20: 21:. if YES then go to 16. 22: 23:. else ignore the message. 24: end if 25: else 26: Ignore the message 27: end if. 15.
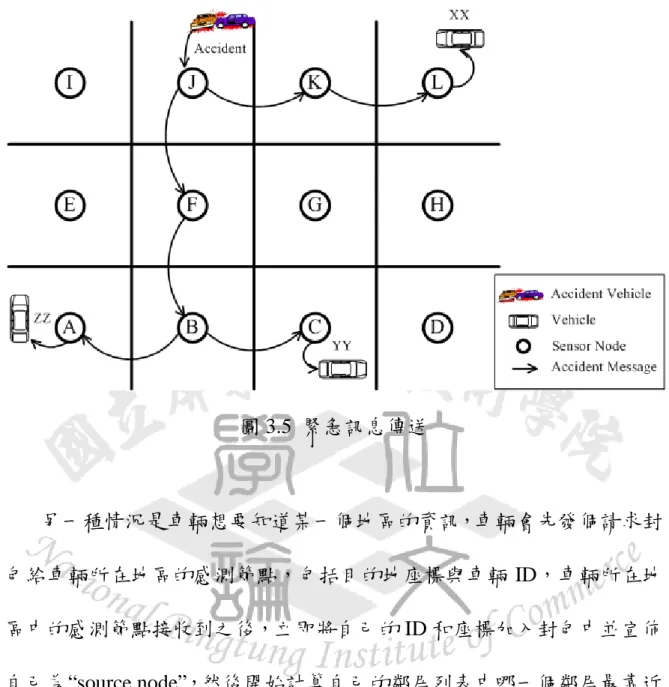
(27) 圖 3.4 建立車輛移動路徑最佳化. 3.3 資料傳輸最佳化 在資料傳輸最佳化藉由車輛移動路徑表且主要分成某個地區想要傳 送資料給車輛和車輛想要知道某個地區的資訊兩種傳輸方式。 第一種情況假設某個地區發生了緊急事故或道路壅塞的情況,這個地 區的感測節點開始查詢車輛移動路徑表,藉由車輛移動路徑表可以找出 車輛行駛最佳路徑鍊結。每一個地區的感測節點都能依照這條鍊結快速 的找尋到車輛,透過這樣的方式來找尋車輛,可以快速的找到並通知緊 急事故地區的情況,可以提前告知駕駛人避免到那個地區或提前繞道, 如圖 3.5 所示,當 J 地區發生事故,J 地區感測節點透過車輛移動路徑表 快速的將緊急訊息傳送給車輛 XX、YY、ZZ。. 16.
(28) 圖 3.5 緊急訊息傳送. 另一種情況是車輛想要知道某一個地區的資訊,車輛會先發個請求封 包給車輛所在地區的感測節點,包括目的地座標與車輛 ID,車輛所在地 區中的感測節點接收到之後,立即將自己的 ID 和座標加入封包中並宣佈 自己為“source node”,然後開始計算自己的鄰居列表中哪一個鄰居最靠近 目的地,計算完畢之後將傳送請求封包給距離目的地最近的鄰居。每一 個中間節點接收到請求封包之後,計算鄰居列表中哪一個鄰居最靠近目 的地並轉送給它,直到找到目的地為止。當這個請求封包轉送至目的地 之後,目的地開始收集車輛所請求的資訊,當請求資訊收集完畢,目的 地節點將會查詢自己的車輛移動路徑表,查詢是否有這台車輛的資訊,. 17.
(29) 如果沒有將藉由鄰居列表計算哪一個鄰居最靠近 source node,並且將收 集完的資訊轉送給它,如果車輛移動路徑表中有這輛車的資訊,則直接 傳送給這輛車的 Next Node,重複 所描述的上面的動作直到找到車輛為止, 如圖 3.6 所示,車輛 XX 想要知道 L 地區的資訊,車輛 XX 先發請求訊息 給車輛地區內的感測節點 A,感測節點 A 立即宣佈自己為 source node 並 加入自己的座標位置之後,立即計算出距離目的地最近的感測節點 B 並 轉送請求訊息給它,當轉送至感測節點 L 並收集完資訊之後,感測節點 L 開始查詢車輛移動路徑表,並且發現沒有車輛 XX 的資訊之後,立即計 算出最靠近 source node 的感測節點為 H 並轉送給它,當轉送至感測節點 G 時發現車輛移動路徑表已有車輛 XX 的資訊,則直接透過車輛移動路 徑表快速的將資料轉送給車輛 XX。. 圖 3.6 請求訊息傳送 18.
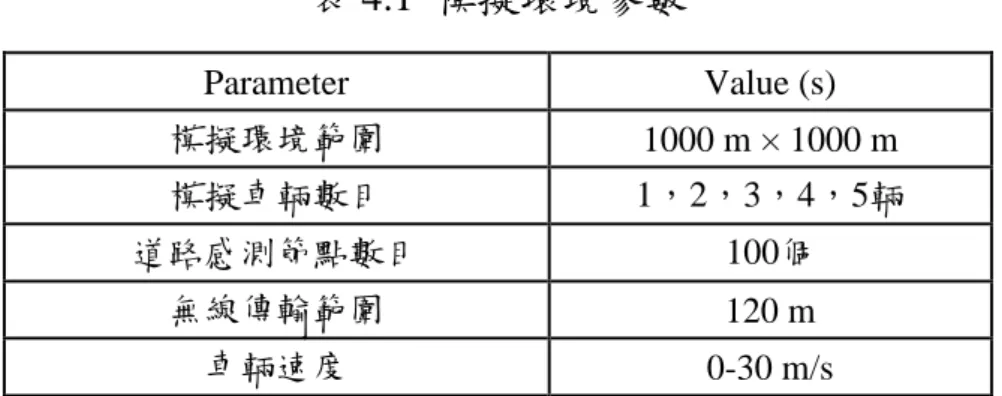
(30) 第四章 模擬與效能評估 本篇論文所提出的資料傳輸最佳化方法,由常見的網路模擬軟體 ns-2 (The Network Simulator) [18]並搭配 SUMO (Simulation of Urban MObility) [19]來產生車輛的移動模擬,來對本論文的系統進行有效的性能評估。本 篇論文模擬主要分成兩種方式,第一種,感測節點想要傳送資訊給車輛, 第二種,車輛想請求某一地區的資訊。所以在這一章節,本篇論文所提 出的路由協定將與記錄車輛原始路徑以及 MDH-R 做一個比較。首先,說 明本論文的模擬環境。最後,將本論文模擬出來的結果做一個效能分析 比較。. 4.1. 模擬環境 本論文模擬的區域為長 1000 公尺寬 1000 公尺,切割成 100 個地區,. 每一個地區大小為 100 × 100 公尺2,每一個地區中心佈署一個感測節點。 每一個感測節點彼此之間的距離為 100 公尺。每一輛車與感測節點假設 傳輸範圍為 120 公尺。模擬的車輛數為 1 至 5 輛,行駛速度 為 0 至 30 m/s。 模擬環境應用的參數在表 4.1 中。 為了能驗證本論文的路由協定能正確且快速的找尋到車輛,也就是感 測節點所建立的車輛移動路徑表是最佳的。然而為了能觀察傳送資訊的 19.
(31) 表 4.1 模擬環境參數 Parameter. Value (s). 模擬環境範圍. 1000 m × 1000 m. 模擬車輛數目. 1,2,3,4,5輛. 道路感測節點數目. 100個. 無線傳輸範圍. 120 m. 車輛速度. 0-30 m/s. 延遲時間,封包遺失率,資料封包傳輸總數及本論文車輛移動路徑表建 立路徑所需花費的封包總數,所以本論文藉由模擬以下效能評估單位來 驗證與觀察: 1. Latency:延遲,資料從感測節點端送到車輛端或車輛端請求資訊 到目的地端,目的地回傳封包總數所需平均時間。 2. Average Packets Loss Ratio:封包遺失率,所有傳送資料封包的 數量與被接收數量的平均遺失比率。 3. Total Number of Data Packets Transmitted:資料封包傳輸總數, 資料從感測節點端送到車輛端或車輛端請求資訊到目的地端,目 的地回傳封包總數。 4. Total Number of Control Message:控制封包數量,建立車輛移 動路徑表所花費封包總數。. 20.
(32) 4.2 效能分析與模擬結果 4.2.1 感測節點傳送資訊給車輛 圖 4.1 中說明,車輛起始地區的感測節點定期傳送封包給車輛,直到 車輛到達目的地停止的封包到達率和延遲時間。將可以發現感測節點依 照車輛的原始路徑和最佳化過的路徑來傳送比較,本論文的方法延遲時 間比原始路徑的低了 27 秒。由於是單一節點傳送封包,所以不管是本論 文的方法還是原始路徑,封包到達率皆是 100%。. 40 35. Delay Time (s). 30 25 20 Path Optimization. 15. Original Path. 10 5 0 0. 100. 200. 300. 400. 500. 556. Execution Time (s). 圖 4.1 感測節點傳送資訊給車輛,單一節點總延遲時間. 21.
(33) 擁有這輛車資訊的感測節點想要傳送資訊給車輛的平均封包遺失率 和延遲時間。如圖 4.2 中將發現,由於都有建立路徑所以遺失率都不高, 但原始路徑的封包遺失率和本論文的方法相比,原始路徑的遺失率相對 比較高,因為原始路徑只記錄車輛的移動路徑,鏈結拖得太長導致傳送 封包時,傳送的節點數越多遺失率就越高,而本論文的方法將車輛移動 路徑最佳化之後,遺失率比原始路徑來的低。在圖 4.3 中,平均延遲時間 中,本論文的方法不管節點數的多寡,平均延遲時間都在 0.02 秒上下, 而原始路徑會隨著節點數的多寡而影響延遲時間。節點數 15 時,延遲時 間為 0.08 秒到了節點數 75 時,延遲時間高達 0.11 秒。. Average Packet Loss Ratio (%). 0.45% 0.40% 0.35% 0.30% 0.25% 0.20%. Path Optimization. 0.15%. Original Path. 0.10% 0.05% 0.00% 15. 30. 45. 60. 75. Numbers of Nodes. 圖 4.2 感測節點傳送資訊給車輛,多個節點平均封包遺失率. 22.
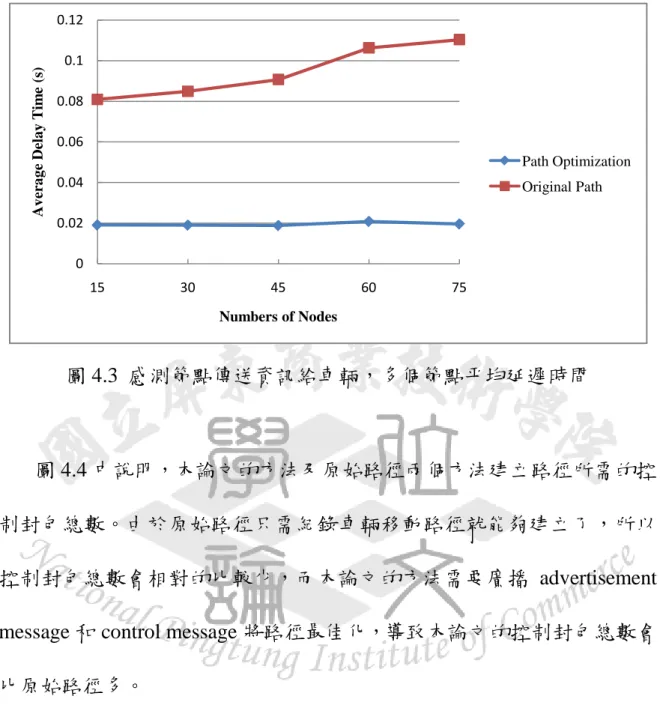
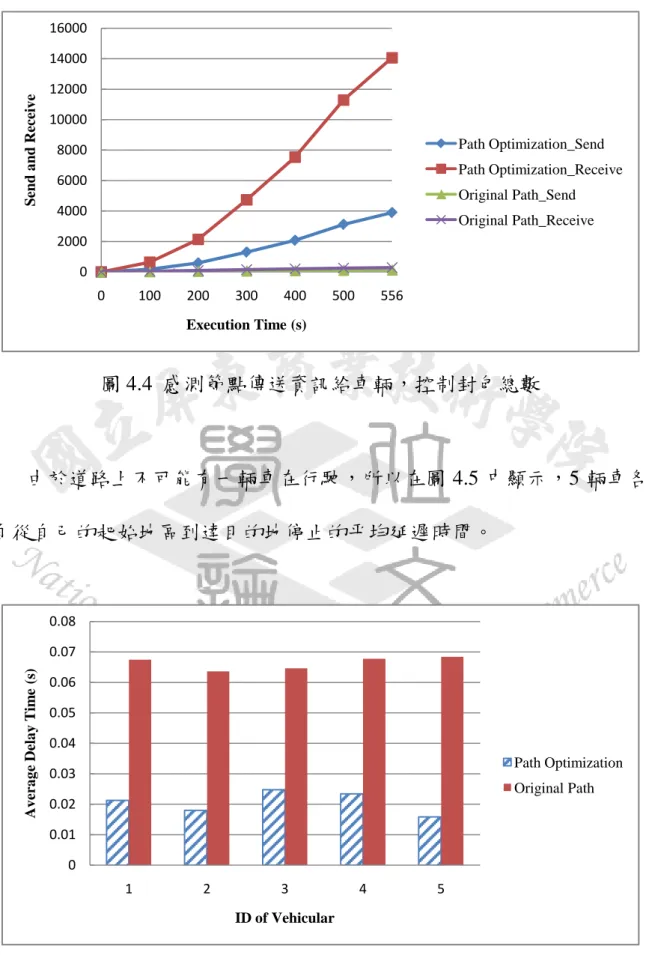
(34) Average Delay Time (s). 0.12 0.1 0.08 0.06 Path Optimization 0.04. Original Path. 0.02 0 15. 30. 45. 60. 75. Numbers of Nodes. 圖 4.3 感測節點傳送資訊給車輛,多個節點平均延遲時間. 圖 4.4 中說明,本論文的方法及原始路徑兩個方法建立路徑所需的控 制封包總數。由於原始路徑只需紀錄車輛移動路徑就能夠建立了,所以 控制封包總數會相對的比較少,而本論文的方法需要廣播 advertisement message 和 control message 將路徑最佳 化,導致本論文的控制封包總數會 比原始路徑多。. 23.
(35) 16000. Send and Receive. 14000 12000 10000 8000. Path Optimization_Send. 6000. Path Optimization_Receive Original Path_Send. 4000. Original Path_Receive. 2000 0 0. 100. 200. 300. 400. 500. 556. Execution Time (s). 圖 4.4 感測節點傳送資訊給車輛,控制封包總數. 由於道路上不可能有一輛車在行駛,所以在圖 4.5 中顯示,5 輛車各 自從自己的起始地區到達目的地停止的平均延遲時間。. 0.08. Average Delay Time (s). 0.07 0.06 0.05 0.04 Path Optimization. 0.03. Original Path. 0.02 0.01 0 1. 2. 3. 4. 5. ID of Vehicular. 圖 4.5 每輛車平均延遲時間. 24.
(36) 車輛所經過的相同地區的感測節點想要傳送資訊給車輛的平均封包 遺失率和延遲時間。如圖 4.6 中將發現,原始路徑當車輛越多,封包遺失 率就越高,尤其道路上有 5 輛車同時在跑,封包遺失率高達 6.4%,由於 第 5 輛車常跟其他 4 輛車交會,所以車輛交會次數越高,封包遺失率就 越高。而本論文的方法不管車輛的多寡,交會次數的多寡,都只緩慢的 上升,不會有太大的起伏。在圖 4.7 平均延遲時間中,本論文的方法不會 因為車輛多寡而有太大的起伏,延遲時間只會在 0.02 秒左右,而原始路 徑在道路上有 5 輛車時比道路上只有 4 輛車時上升幅度沒有前面 1 至 3 輛車來的高,因為封包在傳送過程中已經遺失了,只有比較靠近車輛的 節點封包比較容易傳送到車輛,而距離車輛遠一點的節點封包比較容易 在傳送過程中造成封包碰撞,所以導致延遲時間沒有明顯的上升。. Average Packet Loss Ratio (%). 7% 6% 5% 4% 3%. Path Optimization. 2%. Original Path. 1% 0% 1. 2. 3. 4. 5. Numbers of Vehicular. 圖 4.6 感測節點傳送資訊給車輛,相同地區平均封包遺失率. 25.
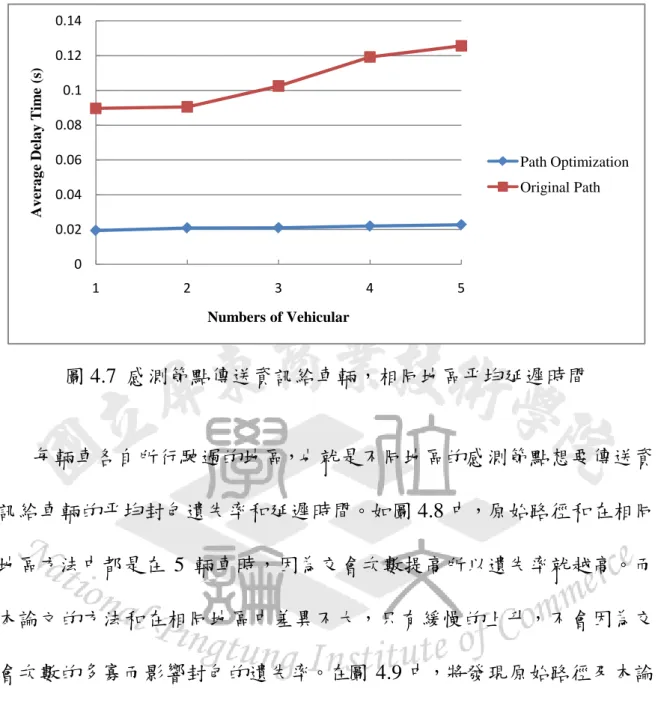
(37) 0.14. Average Delay Time (s). 0.12 0.1 0.08 0.06. Path Optimization. 0.04. Original Path. 0.02 0 1. 2. 3. 4. 5. Numbers of Vehicular. 圖 4.7 感測節點傳送資訊給車輛,相同地區平均延遲時間. 每輛車各自所行駛過的地區,也就是不同地區的感測節點想要傳送資 訊給車輛的平均封包遺失率和延遲時間。如圖 4.8 中,原始路徑和在相同 地區方法中都是在 5 輛車時,因為交會次數提高所以遺失率就越高。而 本論文的方法和在相同地區中差異不大,只有緩慢的上升,不會因為交 會次數的多寡而影響封包的遺失率。在圖 4.9 中,將發現原始路徑及本論 文的方法的延遲時間在相同地區方法中差異不大,本論文的方法延遲時 間都只在 0.02 秒左右,而原始路徑和在相同地區方法中相同也因為離車 輛遠一點的節點在傳送封包時封包碰撞,導致只有比較靠近車輛的節點 比較容易傳送封包到車輛,所以延遲時間沒有前面 1 至 3 輛車時來的高。. 26.
(38) Average Packet Loss Ratio (%). 7% 6% 5% 4% 3%. Path Optimization. 2%. Original Path. 1% 0% 1. 2. 3. 4. 5. Numbers of Vehicular. 圖 4.8 感測節點傳送資訊給車輛,不同地區平均封包遺失率. 0.14. Average Delay Time (s). 0.12 0.1 0.08 0.06. Path Optimization. 0.04. Original Path. 0.02 0 1. 2. 3. 4. 5. Numbers of Vehicular. 圖 4.9 感測節點傳送資訊給車輛,不同地區延遲時間. 27.
(39) 4.2.2 車輛想請求某一地區的資訊 車輛請求某一地區的資訊,目的地收集完資訊回傳給車輛的平均封包 遺失率和延遲時間,並且車輛至目的地平均 hop 數為 8。在圖 4.10 中, 將發現遺失率都不高,MDH-R 和本論文的方法及原始路徑相比還是相對 的偏高,因為 MDH-R 沒有記錄車輛移動路徑,而是靠 replication node 來廣播找尋車輛,所以容易造成碰撞,本論文的方法和原始路徑皆有記 錄路徑所以能夠依照所記錄的路徑找尋車輛,但是本論文的方法因為有 將路徑最佳化所以遺失率比原始路徑來的好。在圖 4.11 平均延遲時間中, 本論文的方法不管車速多快,延遲時間平均為 0.17 秒。原始路徑因為車 速越快延遲時間就會越高。MDH-R 延遲時間介於本論文的方法和原始路 徑之間。原始路徑只有車速 10 m/s 以下的時候延遲時間比 MDH-R 低, 因為車速 10 m/s 以下時,原始路徑的鍊結由於車速的關係,鍊結不會拖 的很長,資料能夠快速的傳送至車輛,如果車速增加至 13 m/s 以上,車 輛的速度增加,車輛鍊結有一定的長度,所以延遲時間低於原始路徑。 MDH-R 由於以廣播的方式所以能夠很快找尋到車輛,但是延遲時間還是 比本論文的方法高。. 28.
(40) Average Packet Loss Ratio (%). 0.60% 0.50% 0.40% 0.30%. Path Optimization Original Path. 0.20%. MDH-R 0.10% 0.00% 10. 15. 20. 25. 30. Speed (m/s). 圖 4.10 車輛想請求某一地區的資訊,平均封包遺失率. 0.04. Average DelayTime (s). 0.035 0.03 0.025 0.02. Path Optimization. 0.015. Original Path. 0.01. MDH-R. 0.005 0 10. 15. 20. 25. 30. Speed (m/s). 圖 4.11 車輛想請求某一地區的資訊,平均延遲時間. 29.
(41) 圖 4.12 中,說明車輛發送請求資訊到目的地,目的地回傳資料封包 總數,在此發現因為 MDH-R 使用 replication node 廣播找尋車輛,導致平 均資料封包總數高達 10000,而本論文的方法和原始路徑因為有建立路徑, 所以皆比 MDH-R 來的低,但原始路徑為平均資料封包總數也需要 1400, 而本論文的方法有最佳化路徑平均資料封包總數只需 800 即可。 圖 4.13 中說明本論文的方法、原始路徑和 MDH-R 三個方法建立路徑 所需的控制封包總數,MDH-R 因為需要定期的維持鄰居列表,所以控制 封包總數比本論文的方法及原始路徑高出非常的多,而本論文的方法和 原始路徑只需建立一次鄰居列表即可。. Total Number of Data Packets Transmitted. 12,000 10,000 8,000 6,000. Path Optimization Original Path. 4,000. MDH-R 2,000 10. 15. 20. 25. 30. Speed (m/s). 圖 4.12 車輛想請求某一地區的資訊,資料封包總數. 30.
(42) 250000. Send and Receive. 200000 Path Optimization_Send. 150000. Path Optimization_Receive Original Path_Send. 100000. Original Path_Receive 50000. MDH-R_Send MDH-R_Receive. 0 0. 100. 200. 300. 400. 500. 556. Execution Time (s). 圖 4.13 車輛想請求某一地區的資訊,控制封包總數. 31.
(43) 第五章 結論與未來展望 在本篇論文中,本論文提出一個以感測節點為基礎的資料傳輸最佳化 路徑在車輛感測網路中。每一個地區中的感測節點可以透過車輛移動路 徑表建立車輛最佳移動路徑。透過 ns-2 網路模擬器比較資料傳輸最佳路 徑,原始路徑和 MDH-R 三個方法。實驗結果分為兩種情況,第一種情況 為在感測節點傳送資訊給車輛中,本論文所提出的方法與原始路徑相比, 在一輛車的情況下,平均封包遺失率大約相差 3.2 倍,延遲時間相差大約 0.075 秒,而多輛車的情況下,平均封包遺失率大約相差 7.3 倍,平均延 遲時間相差大約 0.081 秒。另一種情況在車輛想請求某一地區的資訊中, 本論文所提出的方法,原始路徑,MDH-R 三個方法做比較,在平均封包 遺失率中本論文的方法為 0.04%,原始路徑為 0.09%,MDH-R 高達 0.44%, 在平均延遲時間中本論文的方法為 0.016 秒,原始路徑為 0.30 秒,MDH-R 為 0.027 秒。實驗結果證實本論文的方法因有建立最佳路徑,所以封包遺 失率和延遲時間是低於其他的方法。雖然在建立最佳路徑需要花費比原 始路徑較多的控制封包總數,但是和 MDH-R 相比,本論文的控制封包還 是遠低於它。此外,本論文的方法不會因為車速的改變或傳送資訊的來 源端的多寡而有所影響,因為本論文的方法是依最佳路徑傳送,可以減 32.
(44) 少封包遺失率和延遲時間。 在未來的研究探討上,本論文假設感測節點管理地區範圍都是固定大 小的,希望能依道路的實際情況部屬,例如這個區域的車流量比較大, 感測節點管理這個區域範圍就縮小,而車流量較小的區域感測節點管理 的範圍就擴大,依不同的需求來做最好的部屬並且可以有效率的減少網 路壅塞及增加感測節點的壽命。. 33.
(45) 參考文獻 [1] Dedicated. Short. Range. Communication. (DSRC).. URL http://www.standards.its.dot.gov/Documents/advisories/dsrc_adviso ry.htm [2] J. Harri, F. Filali, and C. Bonnet, “Mobility models for vehicular ad hoc networks: a survey and taxonomy,” IEEE Communications Surveys & Tutorials, vol. 11, no. 4, pp. 19–41, Oct. 2009. [3] IEEE 802.11p. URL http://www.ieee802.org/11/Reports/tgp_update.htm [4] IEEE 1609. URL http://vii.path.berkeley.edu/1609_wave/ [5] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci, “A survey on sensor networks,” IEEE Communications Magazine, vol. 40, no. 8, pp. 102–114, Aug. 2002. [6] D. Goyal and M. R. Tripathy, “Routing protocols in wireless sensor networks: a survey,” International Conference on Advanced Computing & Communication Technologies, pp. 474–480, Jan. 2012. [7] Vehicular. Sensor. Networks. (VSNs).. URL http://lens1.csie.ncku.edu.tw/Project/MOE/98_courseintro.php [8] 黃全淯 , “車載感測網路於大範圍環境監測二氧化碳之應用,” 交通大. 學資訊學院產業研發碩士班學位論文 , 2009. [9] J. Eriksson, L. Girod, B. Hull, R. Newton, S. Madden, and H. Balakrishnan, “The Pothole patrol: using a mobile sensor network for road surface monitoring,” ACM international conference on Mobile. 34.
(46) systems, applications, and services, pp. 29–39, June 2008. [10] U. Lee, B. Zhou, M. Gerla, E. Magistretti, P. Bellavista and A. Corradi, “Mobeyes : smart mobs for urban monitoring with a vehicular sensor network,” IEEE Wireless Communications, vol. 13, no. 5, pp. 52–57, Oct. 2006. [11] U. Lee, E. Magistretti, B. Zhou, M. Gerla, P. Bellavista, and A. Corradi, “Efficient. data. harvesting. in. mobile. sensor. platforms,”. IEEE. International Workshop on Sensor Networks and Systems for Pervasive Computing (PerSeNS), pp. 352–356, Mar. 2006. [12] A. Festag, A. Hessler, R. Baldessari, L. Le, W. Zhang, and D. Westhoff “Vehicle-to-vehicle and road-side sensor communication for enhanced road safety,” International Conference on Intelligent Tutoring Systems, June, 2008. [13] H. Lim and C. Kim, “Flooding in wireless ad hoc networks,” Computer Communications, vol. 24, no. 3-4, pp. 353–363, Feb. 2001. [14] K. W. Lim and Y. B. Ko, “Multi-hop data harvesting in vehicular sensor networks,” IET Communications, vol. 4, no. 7, pp. 768–775, Apr. 2010. [15] I. Joe and M. Shin, “An energy-efficient mobile cluster-based approach for vehicular wireless sensor networks,” International Conference on Networked Computing (INC), pp. 1-5, May 2010. [16] M. Z. Hourani, N. Hussain, R. Ouni, “Novel data harvesting scheme for efficient data aggregation,” International Conference on Wireless Networks (ICWN), July 2011. [17] Global Positioning System (GPS). URL http://www.gps.gov/ [18] The Network Simulator (ns-2). URL http://www.isi.edu/nsnam/ns/. 35.
(47) [19] Simulation. of. Urban. URL http://sumo.sourceforge.net. 36. MObility. (SUMO)..
(48)
數據


+7
相關文件
Old Testament Message Glazier Harpers’ Bible Commentary Harper Harpers’ Bible Dictionary Harper The Interpreter’s One-volume Commentary on..
Binding Warning message Binding Update message AAAO: the AAA server of the old foreign network to which the OFA belongs. AAAF: the AAA server of the new foreign network to which the
Is end-to-end congestion control sufficient for fair and efficient network usage. If not, what should we do
Start with a STUN header, followed by a STUN payload (which is a series of STUN attributes depending on the message type).
Indicate the type and format of information included in the message body. Content-Length: the length of the message
¾ To fetch a Web page, browser establishes TCP connection to the machine where the page is and sends a message over the connection asking for the
To facilitate parents of NCS children in obtaining relevant information on admission arrangements, KGs should create an icon, simple message in English or provide a link to the
n Receiver Report: used to send reception statistics from those participants that receive but do not send them... The RTP Control
