川崎机器人控制器 D/E 系列
通用现场总线 I/O 使用说明书
(选件)
川崎重工业株式会社
长沙工控帮教育科技有限公司
D/E 系列控制器
川崎机器人 通用现场总线 I/O 使用说明书
1
前言
本书是「川崎机器人控制器 D/E 系列」的通用现场总线 I/O 使用说明书。与本书配套,另 外交付的还有基本操作手册(包含安全手册),也请认真阅读。同时还要熟读本书所述的相 关手册。在未掌握本书内容之前请不要开始任何操作。
该说明书对所述的可选功能进行了较为详尽的说明。但不能完全列举包括操作中的不得 不回避的事项在内的全部内容,仅就主要的操作事项进行了说明。另外,对本书记述的类 似操作的结果不能给以保证。(请单独商谈)。
此外,本功能在 D/E 系列控制器中几乎是一样的。对于不同的部分,使用符号/,按照 D 系 列控制器/E 系列控制器的顺序进行标记。
1. 本手册并不构成对使用机器人的整个应用系统的担保。因此,川崎公司将不会对使用 这样的系统而可能导致的事故、损害和(或)与工业产权相关的问题承担责任。
2. 川崎公司郑重建议: 所有参与机器人操作、示教、维护、维修、点检的人员,预先参 加川崎公司准备的培训课程。
3. 川崎公司保留未经预先通知而改变、修订或更新本手册的权利。
4. 事先未经川崎公司书面许可,对本手册整体或其中的任何部分,均不可进行任何形式 的再版、重印、翻印、转载或复制。
5. 请把本手册小心存放好,使之保持在随时备用状态。如果机器人重新安装或移动到另一 个地点,或者卖给另一个使用者,请务必将本手册与机器人放在一起。一旦出现丢失或 严重损坏,请和您的川崎公司代理商联络。
Copyright © 2013 Kawasaki Heavy Industries Ltd. All rights reserved.
川崎重工 版权所有
长沙工控帮教育科技有限公司
D/E 系列控制器
川崎机器人 通用现场总线 I/O 使用说明书 符号
在本手册中,下述符号的内容应特别注意。
为确保机器人的正确安全操作、防止人员伤害和财产损失,请遵守下述方框符号表达的安 全信息。
[ 注 意 ]
指示有关机器人规格、处理、示教、操作和维护的注 意事项。
!
不遵守指出的内容,可导致即将临头的伤害或死亡。
不遵守指出的内容,可能会导致伤害或死亡。
!
!
不遵守指出的内容,可导致人身伤害和/或机械损伤。
!
1. 手册中所给出的图表、顺序和细节说明的精确性和有效性,不能被证实 是绝对正确的。因此,在使用本手册进行任何工作时,必须投于最大的 注意力。如果出现了没有说明的问题,请与川崎公司联系。
2. 本手册描述的有关安全的内容适用于各单独的工作,不能应用于所有的 机器人工作。为了安全地进行各项工作,请仔细阅读和充分理解安全手 册、全部相关法律、规章制度、以及各章节的所有的安全说明,并在实 际工作中准备合适的安全措施。
警 告
警 告 小 心 危 险
长沙工控帮教育科技有限公司
D/E 系列控制器
川崎机器人 通用现场总线 I/O 使用说明书
3
介绍性说明
1. 硬件键和开关(按钮)
为了满足各种操作,E 系列控制器在其操作面板和示教器上提供有各种硬件的键和开关。
在本手册中,各硬件键和开关的名称用下面的方框框出。有时为方便表达,相关名称后的
“键”或“开关”等术语有时会被省略。 当需要同时按两个或更多键时,如同下面的例 子,这些键通过“+”号来表示。
例
菜单:表示硬件键 “菜单”。
TEACH/REPEAT :表示操作面板上的模式切换开关。
A + 程序:表示按下并按住 A 然后按程序。
2. 软件键与开关
E 系列控制器为各种规格和情况的不同种类的操作,提供了显示在示教器屏幕上的软件键 和开关。本手册中,软件键和开关的名称将用尖括号“<>”括起来。有时为方便起见,相 关名称后的“键”或“开关”等术语将会被省略。
例
<写入>:表示一个出现在示教器画面上的 “写入” 键。
<列表>:表示一个示教器画面上的“列表” 键。
3. 选择项目
非常经常地,需要从示教器画面的菜单或下拉式菜单中选择一个项目。本手册中,这些菜 单项目的名称将被方括号[XXX]括起来。
例
[焊接计数器]:表示一个菜单中的项目“焊接计数器”。要选择它,用箭头键移动光标到 相应项目上,然后按 ↵ 键。 为了详细描述,此过程必须每次都描述一遍, 但为了简化表达,“选择[XXX]”将被用来替代详细描述。
长沙工控帮教育科技有限公司
D/E 系列控制器
川崎机器人 通用现场总线 I/O 使用说明书
前言 ... 1 符号 ... 2 介绍性说明 ... 3 1.0 概要 ... 1-1 1.1 可以对应的现场总线 ... 1-2 1.1.1 DeviceNet ... 1-2 1.1.1.1 DeviceNet 的特征 ... 1-2 1.1.1.2 咨询机构 ... 1-3 1.1.2 PROFIBUS ... 1-4 1.1.2.1 PROFIBUS 的特征 ... 1-4 1.1.2.2 咨询机构 ... 1-5 1.1.3 INTERBUS ... 1-6 1.1.3.1 INTERBUS 的特点 ... 1-6 1.1.3.2 咨询机构 ... 1-7 1.1.4 Ethernet/IP ... 1-8 1.1.4.1 Eternet/IP 的特征 ... 1-8 1.1.4.2 咨询机构 ... 1-8 1.1.5 CC-Link ... 1-9 1.1.5.1 CC-Link 的特征 ... 1-9 1.1.5.2 咨询机构 ... 1-12 1.1.6 Modbus/TCP ... 1-13 1.1.6.1 Modbus/TCP 的特征 ... 1-13 1.1.6.2 咨询机构 ... 1-13 1.1.7 CANOPEN ... 1-13 1.1.7.1 CANOPEN 的特征 ... 1-13 1.1.7.2 咨询机构 ... 1-13 1.1.8 PROFInet ... 1-14 1.1.8.1 PROFInet 的特征 ... 1-14 1.1.8.2 咨询机构 ... 1-14 1.1.9 ControlNet ... 1-15 1.1.9.1 ControlNet 的特征 ... 1-15 1.1.9.2 咨询机构 ... 1-15 1.2 购买方法 ... 1-15 2.0 操作前的步骤 ... 2-1
目 录
长沙工控帮教育科技有限公司
D/E 系列控制器
川崎机器人 通用现场总线 I/O 使用说明书
5
3.0 现场总线接口准备 ... 3-1 3.1 1JF 板(D 控制器) ... 3-1 3.2 1QK 板(D 控制器) ... 3-2 3.3 1TJ 板(E 控制器) ... 3-4 3.4 1UK 板(E 控制器) ... 3-5 3.5 1UQ 板(E 控制器) ... 3-7 4.0 AS 内部信号的流程和设定 ... 4-1 5.0 外部输入输出信号数的设定 ... 5-1 6.0 现场总线接口分配登记 ... 6-1 6.1 物理 I/O 接口和主/从端口的关联建立(辅助 0608-2) ... 6-1 6.2 信号配置设定(辅助 0608-1) ... 6-3 6.3 主端口/从端口的信号排列顺序的设定(辅助 0608-3) ... 6-5 6.4 现场总线 I/F 板的固件版本表示 ... 6-8 7.0 信号定义例 ... 7-1 8.0 错误信息 ... 8-1 8.1 现场总线通信的错误 ... 8-1 8.2 PROFIBUS-DP 主局错误子码 ... 8-11 8.3 CC-Link 错误编号一览 ... 8-13 附录 A DEVICENET
A1.0 机器人控制器 DeviceNet(设备网)概述 ... A-1 A2.0 运行前的程序 ... A-2 A3.0 Devicenet - 从站 ... A-3 A3.1 模块的机械概述 ... A-3 A3.2 电缆连接 ... A-4 A3.3 配置 ... A-5 A3.3.1 波特率和 MAC_ID(地址) ... A-5 A3.3.2 EDS 文件... A-6 A3.4 LED 指示灯... A-6 A3.5 AnyBus-S DeviceNet 产品编码 ... A-8 A4.0 DeviceNet - 主站 ... A-9 A4.1 模块的机械概述 ... A-9 A4.2 电缆连接 ... A-10 A4.3 配置 ... A-11
长沙工控帮教育科技有限公司
D/E 系列控制器
川崎机器人 通用现场总线 I/O 使用说明书
A4.3.1 波特率和 MAC_ID(地址) ... A-11 A4.3.2 网络配置 ... A-12 A4.3.3 EDS 文件... A-22 A4.4 DeviceNet 主站监控命令 ... A-23 A4.5 DeviceNet 节点状态显示 ... A-24 A4.6 LED 指示灯... A-26 A4.7 AnyBus-M DeviceNet 产品编码 ... A-28 附录 B PROFIBUS
B1.0 机器人控制器的过程现场总线(PROFIBUS)概述 ... B-1 B1.1 PROFIBUS 产品的供应方 ... B-3 B2.0 运行前的程序 ... B-4 B3.0 Profibus - 从站 ... B-5 B3.1 模块的机械概述 ... B-5 B3.2 电缆连接 ... B-5 B3.2.1 PROFIBUS-DP 连接器 ... B-5 B3.2.2 终止器 ... B-6 B3.3 配置 ... B-7 B3.3.1 波特率 ... B-7 B3.3.2 节点地址 ... B-7 B3.3.3 GSD 文件... B-8 B3.4 LED 指示灯... B-9 B3.5 AnyBus-S PROFIBUS 产品编码 ... B-10 B4.0 PROFIBUS - 主站 ... B-11 B4.1 模块的机械概述 ... B-11 B4.2 电缆连接 ... B-11 B4.2.1 PROFIBUS-DP 连接器 ... B-11 B4.2.2 终止器(仅用于 DP 主站) ... B-12 B4.3 配置 ... B-12 B4.3.1 波特率 ... B-12 B4.3.2 配置连接器 ... B-13 B4.3.3 GSD 文件... B-13 B4.3.4 网络配置 ... B-14 B4.3.4.1 AS 系统和 SYCON ... B-14 B4.3.4.2 HMS SYCON(DP 主站)配置程序 ... B-16 B4.3.4.3 PROFIBUS-DPV1 主站 ... B-18 B4.4 PROFIBUS 主站监控命令 ... B-18 B4.5 PROFIBUS 节点状态显示 ... B-21 B4.6 LED 指示灯... B-23
长沙工控帮教育科技有限公司
D/E 系列控制器
川崎机器人 通用现场总线 I/O 使用说明书
7
B4.6.1 DP 主站... B-23 B4.6.2 DPV1 主站... B-24 B4.7 AnyBus PROFIBUS 主站产品编码 ... B-25 附录 C INTERBUS
C1.0 机器人控制器的 INTERBUS 概述 ... C-1 C2.0 运行前的程序 ... C-2 C3.0 INTERBUS - 从站 ... C-3 C3.1 模块的机械概述 ... C-3 C3.2 INTERBUS 连接器 ... C-3 C3.3 LED 指示灯... C-4 C3.4 AnyBus-S INTERBUS 产品编码 ... C-5 C4.0 INTERBUS – 主站 ... C-6 C4.1 模块的机械概述 ... C-6 C4.2 连接器 ... C-7 C4.2.1 INTERBUS 连接器 ... C-7 C4.2.2 RS232 连接器 ... C-8 C4.3 配置 ... C-9 C4.3.1 板设置 ... C-9 C4.3.2 配置工具 ... C-9 C4.4 LED 指示灯... C-10 C4.5 INTERBUS-S 主站产品编码 ... C-10 附录 D Ethernet/IP
D1.0 机器人控制器 Ethernet/IP 概述 ... D-1 D1.1 机器人控制器 ModBus TCP 功能概述 ... D-2 D2.0 运行前的程序 ... D-3 D3.0 Ethernet/IP-适配器(从站)或 Modbus TCP 服务器 ... D-4 D3.1 模块的机械概述 ... D-4 D3.2 连接器 ... D-5 D3.3 配置 ... D-5 D3.3.1 Ethenet 配置(辅助 0608-4) ... D-6 D3.3.2 用拨码开关进行配置 ... D-8 D3.3.3 EDS 文件... D-9 D3.4 Ethernet/IP 监控命令 ... D-10 D3.5 LED 指示灯... D-12 D3.6 AnyBus-SEthernet/IP 产品编码 ... D-14 D4.0 Ethernet/IP-扫描仪(主站) ... D-15 D4.1 模块的机械概述 ... D-15
长沙工控帮教育科技有限公司
D/E 系列控制器
川崎机器人 通用现场总线 I/O 使用说明书
D4.2 连接器 ... D-16 D4.3 配置 ... D-16 D4.3.1 网络设置(辅助 0608-4) ... D-17 D4.3.2 用拨码开关进行配置 ... D-19 D4.3.3 网络配置 ... D-20 D4.3.4 EDS 文件... D-22 D4.4 Ethernet/IP 监控命令 ... D-23 D4.5 Ethernet/IP 主站监控命令 ... D-24 D4.6 LED 指示灯... D-25 D4.7 AnyBus-MEthernet/IP 产品编码 ... D-27 附录 E CC-Link
E1.0 机器人控制器的 CC-Link 概述 ... E-1 E2.0 运行前的程序 ... E-3 E3.0 设置远程登录数(辅助 0608-5-3) ... E-4 E4.0 CC-link - 从站 ... E-5 E4.1 模块的机械概述 ... E-5 E4.2 电缆连接 ... E-6 E4.3 配置 ... E-7 E4.3.1 设置波特率和地址 ... E-7 E4.3.2 设置占有站数和站数据 ... E-8 E4.4 LED 指示灯... E-9 E4.5 CC-Link 从站卡产品编码 ... E-9 E5.0 CC-Link 主站 ... E-10 E5.1 模块的机械概述 ... E-10 E5.2 电缆连接 ... E-11 E5.3 CC-Link 主站板设置 ... E-12 E5.3.1 单元设置 ... E-12 E5.3.2 传输速度和运行模式设置 ... E-13 E5.3.3 选择器开关设置 ... E-13 E5.4 参数设置 ... E-14 E5.4.1 通用参数 ... E-14 E5.4.2 站数据 ... E-15 E5.4.3 I/O 信号分配与参数间的关系 ... E-18 E5.5 CC-LINK 监控命令 ... E-22 E5.6 CC-Link 节点状态显示 ... E-24 E5.7 LED 指示灯... E-26 E5.8 CC-Link 主站卡产品编码 ... E-27
长沙工控帮教育科技有限公司
D/E 系列控制器
川崎机器人 通用现场总线 I/O 使用说明书
9
附录 F CANopen(E 系列控制器)
F1.0 机器人控制器 CANopen 概述 ... F-1 F2.0 运行前的程序 ... F-2 F3.0 CANopen-从站 ... F-3 F3.1 模块的机械概述 ... F-3 F3.2 CANopen 连接器 ... F-3 F3.3 配置 ... F-4 F3.3.1 波特率 ... F-4 F3.3.2 节点地址 ... F-5 F3.3.3 EDS 文件... F-6 F3.4 LED 指示灯... F-7 F3.5 AnyBus-S CANopen 产品编码 ... F-9 附录 G PROFInet(E 系列控制器)
G1.0 机器人控制器的 PROFInet 概述 ... G-1 G2.0 运行前的程序 ... G-2 G3.0 PROFInet-I/O 设备(Anybus) ... G-3 G3.1 模块的机械概述 ... G-3 G3.2 连接器 ... G-4 G3.2.1 PROFInet-DP 连接器 ... G-4 G3.3 配置 ... G-4 G3.3.1 网络设置 ... G-4 G3.3.2 设备名设置(辅助 060807) ... G-6 G3.3.3 GSD 文件... G-7 G3.4 LED 指示灯... G-7 G3.5 PROFInet-IO 产品编码 ... G-9 G4.0 PROFInet-IO 控制器,IO 设备(CP1616) ... G-10 G4.1 模块的机械概述 ... G-10 G4.2 连接器 ... G-11 G4.2.1 RJ-45 连接器 ... G-11 G4.2.2 外部电源供给连接器 ... G-12 G4.3 配置 ... G-12 G4.3.1 目录文件(GSDML) ... G-12 G4.3.2 环境設定 ... G-12 G4.3.3 网络配置 ... G-13 G4.4 LED 指示灯... G-14 G4.5 CP1616 产品编码 ... G-14
长沙工控帮教育科技有限公司
D/E 系列控制器
川崎机器人 通用现场总线 I/O 使用说明书 附录 H ControlNet(E 系列控制器)
H1.0 机器人控制器的 ControlNet 概述 ... H-1 H2.0 运行前的程序 ... H-2 H3.0 ControlNet - 从站 ... H-3 H3.1 模块的机械概述 ... H-3 H3.2 ControlNet 连接器 ... H-4 H3.3 配置 ... H-5 H3.3.1 MAC_ID(地址) ... H-5 H3.3.2 EDS 文件... H-6 H3.4 LED 指示灯... H-6 H3.5 AnyBus-S ControlNet 产品编码 ... H-8
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
1-1
1.0 概要
川崎机器人控制器可通过各种现场总线与 FA 系统内的装置进行连接,建立现场总线网络。
将装有各种现场总线接口卡的现场总线母板(1JF(1QK)/1TJ 板)插入机器人控制器的 VME/PCI 总线槽内,与现场总线上的各种装置通讯。现场总线接口卡采用符合各种现场总 线规格的基准。机器人控制器和其它控制器及周围的机器将 ON/OFF 信息做为输入输出信 号进行通讯。此外,也可同时并用 LOCAL 总线槽内的外部 I/O 板(1GW(1HW)/1TW 板)。
下图是使用 AnyBus-S-DeviceNet 卡的系统结构例子。
当前支持的现场总线如下:
1.DeviceNet 主/从 2.PROFIBUS-DP 主/从 3.INTERBUS 主/从 4.EtherNet/IP 主/从 5.CC-Link 主/从 6. Modbus-TCP 从
7. CANopen 从(只在 E 控制器上可利用。) 8.PROFInet 主/从(只在 E 控制器上可利用。) 9. ControlNet 从(在 D 控制器上用选件板可利用。)
关于各个现场总线的细节请参考附录或各个现场总线的说明书。
机器人控制器
现场总线母板 (1JF(1QK)/1TJ 板)
AnyBus-S- DeviceNet 卡
DeviceNet 线缆
DeviceNet 主控制器(PLC)
本地外部 I/O 板 外部 I/O 机器
(焊接机等)
图 1.1 系统构成例
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
1.1 可以对应的现场总线
控制器支持的各个现场总线的概要如下。关于各个现场总线的细节请参考附录或各个现 场总线的说明书。
1.1.1 DeviceNet
1.1.1.1 DeviceNet 的特征
DeviceNet 将工业用设备(传感器和执行器等)和控制器连接。DeviceNet 中采用基于网络 广播协议的 CAN(Controller Area Network)技术。DeviceNet 的主要特征如下。
下面表示了 DeviceNet 的物理特点,输送媒介的特点及通讯的特性。
1. 物理特点和传播媒介的特点
1)DeviceNet 专用电缆(双绞线):双绞信号屏蔽电缆和双绞电源屏蔽电缆 2)主/从通信及点对点通信
3)干线和支线结构 4)最大支持 64 个节点
5)无需停止网络即可去掉节点
6)可同时支持网络供给电源的设备(传感器)和其它供给电源的设备(执行器) 7)开放式连接器的使用
8)对布线故障的保护
9)可选择 125k、250k、或 500 kbit/s 的数据传输速度 10)可按照每个应用的要求调整电源结构
11)较高的电流供给能力(1 台电流最大 16 A) 12)用已有的电源动作
13)使用电源拓扑,可以连接多个符合供应方供给的 DeviceNet 规格的电源。
14)内置超负荷保护功能
15)由于电源线和信号线都可并入干线中,所以可通过总线利用电源。
2. 通讯特点
1)典型的请求/应答模式的网络通讯形态 2)I/O 数据的高效传送形态
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
1-3
3)大量信息分割后传送
4)网络能配置最大 64 节点。各个节点在网络上有 MAC_ID(节点地址)0-63。
5)重复 MAC_ID 地址检查
注意* MAC = Media Access Control 1.1.1.2 咨询机构
DeviceNet 由供应方构成的机构 Open DeviceNet Vendor Association(以下称为 ODVA) 进行 DeviceNet 规格的管理和支援。请参看如下的网址。
Web : http://www.odva.org
图 1.2 简要系统构成例
24 V 电源
电源拓扑
电源线 信号线
节点 节点 节点 节点 节点
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
1.1.2 PROFIBUS
1.1.2.1 PROFIBUS 的特征
PROFIBUS 符合欧洲现场总线规格 EN50170 标准。做为 PROFIBUS 系列,有 PROFIBUS-FMS、
PROFIBUS-DP、PROFIBUS-PA 3 种。
1.PROFIBUS-FMS:采用面向对象的模型实现在 PLC、DCS、PC 等的智能站之间的通信。
2.PROFIBUS-DP :能实现控制器、远程 I/O 及驱动器等现场装置间的高速数据传输。
通常用于工厂的自动化控制。
3.PROFIBUS-PA :用于过程自动化控制,且通讯用总线电缆可提供电源。
PROFIBUS-DP 的设备类型有以下三种。
1.DP 主局 1 级(DPM1) PLC 等,用于中央控制器。
2.DP 主局 2 级(DPM2)
用于 DP 系统的配置诊断,过程数据的监控和判断。
3.从局
二进制、模拟量输入输出、设备、阀等周边装置。
川崎机器人控制器的 PROFIBUS-DP 接口支持 DP 主局 1 级(DPM1)。我公司 PROFIBUS 的连 接采用的是 PROFIBUS-DP 模式。只要没有特别说明指的就是 PROFIBUS-DP。PROFIBUS-DP 的主要特征如下。
1. 物理特征和传输介质的特征
(1)传输技术:PROFIBUS DIN 19245 Part 1 1)EIA RS 485 双绞线或光纤导线
2)传输速度 9.6 kbit/s~12 Mbit/s 传输速度为 1.5 Mbit/s 时最长 200 m 3)可通过转发器进行扩展
(2)介质访问:依据 DIN 19245 Part 1 标准混合介质访问协议 1)支持单独主系统或多个主系统
2)主局或从局在同一总线内可设置 126 局
(3)通讯:点对点(用户数据传输)或多点传输(同步传输)
周期性主局、从局数据传输或非周期性主局、从局数据传输 (4)总线访问:令牌传递
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
1-5
(5)布线和导入:局的连接和分离不对其它局产生影响 2. 通信特性
(1)动作模式:
1)动作:输入输出数据的周期性传输 2)清除:读取输入数据,清除输出数据 3)停止:仅主局、主功能有效
(2)同步:全部的 DP-从局输入输出同步 1)同步模式:输出同步
2)自由模式:输入同步 (3)功能:
1)DP-主局和 DP-从局间周期性数据传输 2)每个 DP-从局的动作或停止
3)DP-从局配置检查
4)有效的诊断功能,3 级诊断信息 5)输入输出的同步
6)分配总线上的 DP-从局的地址 7)总线上的 DP-主局(DPM1)的配置
8)1 个 DP-从局最大可提供 244 字节用于输入输出(通常 32 字节) (4)机密保证及保护机构:
1)所有的信息用 Hamming Distance HD = 4 传输 2)DP-从局的看门狗计时器
3)DP-从局输入输出的存取保护
4)DP-主局(DPM1)配置的可能时间间隔的数据传输监控
1.1.2.2 咨询机构
国际性用户团体国际 PROFIBUS 总线协会(PI)和各国的 PROFIBUS 总线用户协会(PNO)。咨 询地点请参看如下的网址。
Web : http://www.profibus.com
另外,PROFIBUS 的一般事项,请用电子邮件与国际 PROFIBUS 总线协会联系。
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
1.1.3 INTERBUS
1.1.3.1 INTERBUS 的特点
INTERBUS 实现了阀门和传感器等的 I/O 单元的控制自动化,主要应用在汽车工业,食品工 业,设备制造业,过程工程技术等多种产业上。INTERBUS 的主要特征如下。
1. 物理特征和传输介质的特征 (1)传输技术
1)RS485 双绞线(2 对+GND) 2)光学接口
3)传送率 500 kbit/s 4)总输入输出点数:4096 点 (2)辅助总线
1)本地总线:一个本地总线最大 8 个节点
2)安装远程总线(从远程总线分支出的总线):最大 256 节点 3)从主局悬垂的远程总线:最大 256 节点
(3)最长的总线电缆
1)主机至第一个远程总线模块间:400 m 2)2 个远程总线模块间:400 m
3)主机至末端遥控模块间:12.8 km (4)介质访问: 支持单独的主系统 2.通信特性
(1)数据类型: 1.过程数据 1)可确定时间
2)转换寄存器类型 3)全祯通信协议
4)循环时间依 I/O 的点数而不同 (2)数据类型: 2.PCP 对象
1)不同的 PCP 对象区域访问保护 2)读写保护
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
1-7
1.1.3.2 咨询机构
做为 INTERBUS 的用户机构,INTERBUS-CLUB 对 INTERBUS 相关的问题给以支持。有关 INTERBUS 的详细信息请参看如下的网址。
Web :http://www.interbusclub.com
安装远程总线 本地总线
远程总线
主局
图 1.3
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
1.1.4 ETHERNET/IP
1.1.4.1 ETERNET/IP 的特征
生产系统及管理库存、资材信息系统构成所需的单独网络系统,需使用 EtherNet 的现场 总线的标准化 Ethernet/IP(Ethernet Industrial Protocol)规格。Ethernet/IP 的主要 特征如下。
1. 物理特征和传输介质的特征
(1)Ethernet /IP 是利用市场出售的一般 EtherNet 通信芯片及物理介质的工业用网络, 它使用如下的技术
(2)屏蔽对绞电缆(双绞线电缆)或光纤导线 (3)传输速度:10100 Mbit/s
(4)连接器:RJ45,M12 光纤连接器 2.通信特性
(1)IEEE802.3 物理的及开放性网络 (2)Ethernet TCP/IP 协议群
(3)应用层上的开放性协议( CIP : Control and Information Protocol )
CIP 具有 DeviceNet 的标准规格,也使用 ControlNet。CIP 数据包通过 TCP/UDP 接发数据信息。如果 Ethernet/IP 和 DeviceNet 及 ControlNet 用 CIP 路由器互 相连接的话,在不同的网络上存在的设备之间可以接收和发送数据。
1.1.4.2 咨询机构
EtherNet/IP 是由 ControlNet International(CI)、Industrial EtherNet
Association(IEA)、Open DeviceNet Vendor Association(ODVA)支持的规格。关于 EtherNet/IP 的详细信息请参考如下的网站。
Web : http://www.odva.org
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
1-9
1.1.5 CC-Link
1.1.5.1 CC-Link 的特征
CC-Link(Control & Communication Link)系统,是由专用电缆连接分散配置的输入输出 单元,智能功能单元,特殊功能单元等,通过顺控CPU实现控制的系统。有如下所示的局。
主局...控制数据连接系统的局 远程I/O局...仅处理彼特位信息的远程局
远程设备局...处理比特位信息和字位信息的远程局
本地局...具有顺控CPU的主局及能其它本地局进行通讯的局 智能设备局...可进行实时传送的局
下面表示了 CC-Link 的物理特征,传输介质的特征和通信的特性。
1. 物理特征和传输介质的特征 (1) 传输路径:总线形式
(2) 传输速度:156 kbit/s至10 Mbit/s
(3) 连接电缆:CC-Link 专用电缆(带屏蔽的 3 芯双绞线) (4) 电气特点:依照 EIA 规格 RS485
2. 通信特性
(1) 通信方式:广播轮询方式 (2) 从局号 1~64
(3) 最大占有局数:4 局 (4) 最大比特位据数(4 局)
Version1.0 输入 128 点 输出 128 点 Version2.0 输入 896 点 输出 896 点 (5) 最大文字位据数(4 局)
Version1.0 输入 16 点 输出 16 点 Version2.0 输入 128 点 输出 128 点
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
(6) 最大连接点数
Version1.0 RX,RY:2048 点 RWw(主→从局):256 点
RWr(从→主局):256 点
Version2.0 RX,RY:8192 点
RWw(主→从局):2048 点 RWr(从→主局):2048 点 (7) 最大连接台数
远程 I/O 局 最大 64 台 远程设备局 最大 42 台
本地局 智能局 最大 26 台 ・
(8) 连接台数的条件 Version1
条件 1
{(1×a)+(2×b)+(3×c)+(4×d)}≦64 a:1局占有设备的台数
b:2局占有设备的台数 c:3局占有设备的台数 d:4局占有设备的台数 条件 2
{(16×A)+(54×B)+(88×C)}≦2304 A:远程I/O局的台数 ≦64台 B:远程设备局的台数 ≦42台
C:本地局,待机主局,智能设备局的台数≦26台 Version2
条件 1
{(a+a2+a4+a8)+(b+b2+b4+b8)×2+(c+c2+c4+c8)×3+(d+d2+d4
+d8)×4}≦64 条件 2
[{(a×32)+(a2×32)+(a4×64)+(a8×128)}
+{(b×64)+(b2×96)+(b4×192)+(b8×384)}
+{(c×96)+(c2×160)+(c4×320)+(c8×640)}
+{(d×128)+(d2×224)+(d4×448)+(d8×896)}]≦8192
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
1-11
条件 3
[{(a×4)+(a2×8)+(a4×16)+(a8×32)}
+{(b×8)+(b2×16)+(b4×32)+(b8×64)}
+{(c×12)+(c2×24)+(c4×48)+(c8×96)}
+{(d×16)+(d2×32)+(d4×64)+(d8×128)}]≦2048
a:对应占有1局Ver.1的子局,对应占有1局Ver.2的子局1倍设定的合计台数 b:对应占有2局Ver.1的子局,对应占有2局Ver.2的子局1倍设定的合计台数 c:对应占有3局Ver.1的子局,对应占有3局Ver.2的子局1倍设定的合计台数 d:对应占有4局Ver.1的子局,对应占有4局Ver.2的子局1倍设定的合计台数 a2:对应占有1局Ver.2的子局2倍设定的台数
b2:对应占有2局Ver.2的子局2倍设定的台数 c2:对应占有3局Ver.2的子局2倍设定的台数 d2:对应占有4局Ver.2的子局2倍设定的台数 a4:对应占有1局Ver.2的子局4倍设定的台数 b4:对应占有2局Ver.2的子局4倍设定的台数 c4:对应占有3局Ver.2的子局4倍设定的台数 d4:对应占有4局Ver.2的子局4倍设定的台数 a8:对应占有1局Ver.2的子局8倍设定的台数 b8:对应占有2局Ver.2的子局4倍设定的台数 c8:对应占有3局Ver.2的子局4倍设定的台数 d8:对应占有4局Ver.2的子局4倍设定的台数 条件 4
{(16×A)+(54×B)+(88×C)}≦2304 A:远程I/O局的台数 ≦64台
B:远程设备局的台数 ≦42台
C:本地局,待机主局,智能设备局的台数≦26台
主局
远程设 备局 远程设
备局 远程设
备局
本地局 远程设
备局
本地局
终端阻抗
最大传输距离
终端阻抗
图 1.4 概略系统构成例
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
远程局,本地局,智能设备局的通信可能的信号点数如下。
根据扩张循环设定和占有局数,通信可能的比特位数而不同。Version1 和一倍的设定相 同。
1 倍设定 2 倍设定 4 倍设定 8 倍设定
扩张 循环 设定 占有局数
输入 输出 输入 输出 输入 输出 输入 输出 1 局 32 点 32 点 32 点 32 点 64 点 64 点 128 点 128 点 2 局 64 点 64 点 96 点 96 点 192 点 192 点 384 点 384 点 3 局 96 点 96 点 160 点 160 点 320 点 320 点 640 点 640 点 4 局 128 点 128 点 224 点 224 点 448 点 448 点 896 点 896 点
表 1.1 比特位数
文字位数,1 点是 16 比特。
1 倍设定 2 倍设定 4 倍设定 8 倍设定
扩张 循环 設定 占有局数
输入 输出 输入 输出 输入 输出 输入 输出
1 局 4 点 4 点 8 点 8 点 16 点 16 点 32 点 32 点 2 局 8 点 8 点 16 点 16 点 32 点 32 点 64 点 64 点 3 局 12 点 12 点 24 点 24 点 48 点 48 点 96 点 96 点 4 局 16 点 16 点 32 点 32 点 64 点 64 点 128 点 128 点
表 1.2 文字位数
1.1.5.2 咨询机构
关于 CC-Link 的详细信息请参看如下的网站。
Web : http://www.cc-link.org
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
1-13
1.1.6 MODBUS/TCP
1.1.6.1 MODBUS/TCP 的特征
Modbus/TCP 在 TCP/IP 协议上有 Modbus 协议。Modbus 为可编程序逻辑控制器(PLC)由 Modicon 公司开发于 1979 年,是串行通信协议,支持单独主系统或多个从系统。
与机器人控制器一起使用时,请参看附录 D3.0。
1.1.6.2 咨询机构
关于 Modbus 的详细信息请参看如下的网站。
Web : http://www.modbus.org 1.1.7 CANOPEN
1.1.7.1 CANOPEN 的特征
CAN(Controller Area Network)open 是由 CAN 系统用的通信协议和设备轮廓规格构成。
其传输介质和通信特征如下所述。
1. 物理特征和传输介质的特征 (1)2 线式屏蔽双绞线电缆
(2)可构成主/从系统或点对点系统 (3)传输速度:10 kbit/s – 1 Mbit/s (4)传输距离:最大 5000 m
(5)可使用封闭型和开放型的连接器 2.通信特性
(1)节点连接数:最大127
(2)不用关闭系统即可使节点分离 1.1.7.2 咨询机构
CiA是国际用户和生产者的团体,开发而支持CANopen和基上位层的协议。非赢利的CiA建 立于1992年,提供与CAN有关联的技术、产品和市场信息。
http://www.can-cia.org
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
1.1.8 PROFINET
1.1.8.1 PROFINET 的特征
PROFInet 中采用工业用 Ethernet 通信技术。PROFInet 有 3 种以下所示的性能水准。
1. NRT(Non Real-time)
NRT 通信依据 TCP/IP。用于不需要实时性的单元之间通信或参数通信。
2. RT(Real-time)
用标准 Ethernet 硬件,以实现大约 10 ms 周期的实时通信。
3. IRT(Isochronous Real-time)
IRT 在一定时间内通信得比 RT 更确实。通信周期短于 1 ms,抖动短于 1 μs。
PROFInet 用高速 Ethernet 技术实现实时通信。其传输介质和通信特征如下所述。
1. 物理特征和传输介质的特征
(1)屏蔽对绞电缆(双绞线电缆)或光纤导线 (2)传输速度:100 Mbit/s
(3)连接器:RJ45 或 M12 (4)依照 IEEE802.3 2.通信特性
(1)TCP/IP 协议
(2)实时性:根据 IEEE802.1Q 控制数据包的优先度 1.1.8.2 咨询机构
PI(PROFIBUS International)定义 PROFIBUS 标准规格和 PROFINET 标准规格而支援。关 于 PROFInet 的详细信息请参看如下的网站。
Web:http://www.profibus.com
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
1-15
1.1.9 CONTROLNET
1.1.9.1 CONTROLNET 的特征 1. 物理特征和传输介质的特征
(1)物理介质:同轴电缆(R6/U),光纤导线 (2)传输速度:5 Mbit/s
(3)连接器(标准):同轴 BNC
(4)总线结构:线性干线,星,树,混合 (5)1 段长度:
5 Mbit/s 时,1000 m(同轴电缆)(有 2 个节点,1000 m,有 48 个节点, 250M) 5 Mbit/s 时,3000 m(光纤导线)
(6)中继器数:最大 6(串接),6 个段(串接)(5 个中继器),48 个段(并联) (7)设备电源:外部电源
(8)数据包的大小:可变,0-510 bytes
(9)通信方式(总线地址规格):主/从,多个主,点对点 (10)通电中可以安装设备
2.通信特性
(1)网络系统功能 MAC ID 的双重检测 信息的分段化(块传送)
(2)节点数:可寻址节点-最大 99, 无中继器的分接头(节点):48 (3)通信方式:供者/用者
(4)数据输入/输出触发:查询,周期,状态变化 1.1.9.2 咨询机构
CI(ControlNet International)、IEA(Industrial Ethernet Association)和 ODVA(Open DeviceNet Vendor Association)支持 ControlNet。关于 ControlNet 的详细信息请参看 如下的网站。
Web:http://www.odva.org 1.2 购买方法
各现场总线接口卡可从本司或其他代理店购入。客户单独购买各现场总线接口卡时,需与 我公司联系确认。
长沙工控帮教育科技有限公司
D/E 系列控制器 1.概要 川崎机器人 通用现场总线 I/O 使用说明书
长沙工控帮教育科技有限公司
D/E 系列控制器 2.操作前的步骤 川崎机器人 通用现场总线 I/O 使用说明书
2-1
2.0 操作前的步骤 操作前的步骤如下。
是各现场总线的单个处理, 是各种现场总线共同的必要操作。
1.现场总线接口卡的准备(参看第 3 章)
2.现场总线接口卡的设定(参看附录的各个现场总线的说明) 3.机器人控制器的电源 ON
4.现场总线接口分配登记(信号配置设定)
外部输入输出信号数比当前设定值减少之前,需将变更后的信号数
(辅助功能 0611:信号数设定)和信号配置(辅助功能 0608-1)进行整合操作。
(参考第 5 章的例 2)
5.外部输入输出信号数的设定(参看第 5 章)
6.物理 I/O 接口和主/从端口的关联建立(参看 6.1 节) 7.机器人控制器的电源 OFF/ON
8.信号配置数据设定 (参看 6.2 节)
9.主端口/从端口的信号排列顺序设定 (参看 6.3 节) 10.网络配置 (参看附录的各个现场总线的说明) 11.操作开始
[ 注 意 ]
本说明书中的“个人计算机”指的是装载有 Windows 的个人计算机(不含 Windows 3.1)。在 Windows 上构建网络时,请使用配置工具来确认要求的运 行环境。
长沙工控帮教育科技有限公司
D/E 系列控制器 2.操作前的步骤 川崎机器人 通用现场总线 I/O 使用说明书
长沙工控帮教育科技有限公司
D/E 系列控制器 3.现场总线接口准备 川崎机器人 通用现场总线 I/O 使用说明书
3-1
3.0 现场总线接口准备
机器人控制器通过现场总线与外部机器进行通信处理时必需要准备母板。做为母板在 D 控制器中请使用 1JF 板或 1QK 板,在 E 控制器中请使用 1TJ 板。1QK 板是在 D 控制器内, 当通过 CC-Link 主局进行通信时使用。
3.1 1 JF 板(D 控制器)
现场总线母板(1JF 板)上装有各种现场总线接口卡,来实现机器人控制器的现场总线通 信。在 1JF 板上可使用 CN1 和 CN2 两个连接器。
CN1 连接器上装有从局用接口卡。CN2 连接器上装有主局用接口卡。1JF 板上可以只有 CN1、CN2,或 CN1 和 CN2 都有。若 CN1 和 CN2 安装不同的现场总线接口卡的话,可以支持 两种不同的现场总线网络。但 CC-Link 主局在 1JF 板上不能使用。
例如,在 CN1 连接器上安装 AnyBus-S-DeviceNet 卡进行 DeviceNet 通信。此时,DeviceNet 的实际接口板就是 AnyBus-S-DeviceNet 卡。另外,若在 CN2 上安装 PROFIBUS-DP 主卡的 话,D 控制器在 DeviceNet 外还可进行 PROFIBUS 通信。(图 3.1)
用户自行购买现场总线接口卡时,请按照如下的步骤将现场总线接口卡装到我公司提供 的现场总线母板(1JF 板)上。
从局专用 例 DeviceNet
主局专用 例 PROFIBUS-DP
现场总线母板(1JF 基板) 现场总线接口卡
固定螺丝
跳线设定
CN3
CN1
CN2
CN4 C B A
J4 J3 J2 J1
V M E 总 线 连 接 器
图 3.1 现场总线接口板
长沙工控帮教育科技有限公司
D/E 系列控制器 3.现场总线接口准备 川崎机器人 通用现场总线 I/O 使用说明书
1.应用连接器的连接
将现场总线接口卡的应用连接器与 1JF 板上的 CN1 连接器或 CN2 连接器相连接。关 于各连接器可连接的接口卡,请参看 6.1 节。
2.在 1JF 板上用螺丝固定卡片。
3.按如下步骤设定跳线。
(1)接口卡装在 CN1 连接器一侧时
J1:使 A-B 短路。(表示在 CN1 侧存在现场总线接口卡) J2:使 B-C 短路。
J3:使 B-C 短路。
J4:使 B-C 短路。
(2)接口卡装在 CN2 连接器一侧时
J2:使 A-B 短路。(表示在 CN2 侧存在现场总线接口卡) 4.将装有接口卡的 1JF 板放入 VME 卡槽中。
5.用各现场总线的专用电缆进行连接。
3.2 1QK 板(D 控制器)
1QK 板是 CC-Link 主局通信时使用的板。在 1QK 板上可使用 CN1 和 CN2 两个连接器。
CN1 连接器同 1JF 板的 CN1 一样可安装相同的卡。CN2 连接器上只可以安装 CC-Link 主 卡。在 CN1 和 CN2 上安装不同的现场总线接口卡的话,可以支持两种不同的现场总线网 络。
例如,CN1 连接器上安装 AnyBus-S-DeviceNet 卡片进行 DeviceNet 通信,同时在 CN2 上安 装 CC-Link 主卡的话,D 控制器就可在 DeviceNet 之外进行 CC-Link 通信。(图 3.2)
长沙工控帮教育科技有限公司
D/E 系列控制器 3.现场总线接口准备 川崎机器人 通用现场总线 I/O 使用说明书
3-3
用户自行购买现场总线接口卡时,请按照如下的步骤将现场总线接口卡安装到我公司提 供的现场总线母板(1QK 板)上.
1.应用连接器的连接
将现场总线接口卡的应用连接器和 1QK 板的 CN1 连接器或 CN2 连接器相连接。关于 各连接器可连接的接口卡,请参看 6.1 节。
2.用螺丝把卡固定在 1QK 板上。
3.使跳线(JP1)的 1-2 短路。
4.把装有接口卡的 1QK 板插入 VME 卡槽中。
5.用各现场总线的专用电缆进行连接。
图 3.2 现场总线接口板
现场总线母板(1QK 基板) 现场总线接口卡
固定 螺丝
CN2
CN1
V M E 总 线 连 接 器 CC-Link 主局专用
CC-Link 主局以外 的接口板专用
3 JP1 1
长沙工控帮教育科技有限公司
D/E 系列控制器 3.现场总线接口准备 川崎机器人 通用现场总线 I/O 使用说明书
3.3 1TJ 板(E 控制器)
在 E 控制器中把各现场总线接口卡装到现场总线母板(1TJ 板)上,实现机器人控制器的 现场通信。在 1TJ 板上可使用 CN1 和 CN2 这 2 个连接器。但对 Control Net 按照通信子 板的形状使用 CN3 或 CN4 连接器。
CN1 连接器上安装从局用卡。CN2 连接器上安装主局用卡。1TJ 板上可以只有 CN1、CN2, 或 CN1 和 CN2 都有。在 CN1 和 CN2 上安装不同的现场总线接口卡的话,可支持两种不同 的现场总线网络。但 CC-Link 主局在 1TJ 板上不能使用。
例如,CN1 连接器上安装 AnyBus-S-DeviceNet 卡进行 DeviceNet 通信。此时 DeviceNet 的实际接口板就成为 AnyBus-S-DeviceNet 卡了。另外,这时在 CN2 连接器上安装
PROFIBUS-DP 主卡的话,用 E 控制器可在 DeviceNet 之外进行 PROFIBUS 通信。(图 3.3)
用户自行购买现场总线接口卡时,请按照如下的步骤将现场总线接口卡安装到我公司提 供的现场总线母板(1TJ 板)上。
从局专用 例 DeviceNet
主局专用 例 PROFIBUS-DP
现场总线母板(1TJ 板) 现场总线接口卡
固定螺丝
拨码开关 1
CN1(/3)
CN2(/4)
P C I 总 线 连 接 器
图 3.3 现场总线接口板
OFF
↓ ON
FG 端子
长沙工控帮教育科技有限公司
D/E 系列控制器 3.现场总线接口准备 川崎机器人 通用现场总线 I/O 使用说明书
3-5
1.应用连接器的连接
将现场总线接口卡的应用连接器和 1TJ 板的 CN1 连接器或 CN2 连接器相连接。关于 各连接器可连接的接口卡,请参看 6.1 节。
2.用螺丝把卡固定在 1TJ 板上。
3.接着把拨码开关 1 全部设定为 OFF。
4.把装有接口卡的 1TJ 板插入卡槽中。
5.用各现场总线专用电缆进行连接。
3.4 1UK 板(E 控制器)
进行 CC-Link 主通信时,使用 1UK 板。在 1UK 板上可使用 CN1 和 CN2 这 2 个连接器。
在 CN1 连接器上可以安装在 1TJ 板的 CN1 上能安装的卡。在 CN2 连接器上只可以安装 CC-Link 主卡。在 CN1 和 CN2 上安装不同的现场总线接口卡的话,可支持两种不同的现场 总线网络。
例如,CN1 连接器上安装 AnyBus-S-DeviceNet 卡进行 DeviceNet 通信。同时在 CN2 连接 器上安装 CC-Link 主卡的话,用 E 控制器可在 DeviceNet 之外进行 CC-Link 通信。(图 3.4)
在附近有很多噪声,用低阻抗电缆接地 1TJ 板上的 FG 端子和机器人 控制器的框架。(推荐编织线。)
注 1UK 板上的 FG 端子没有螺丝。
推荐螺丝规格:M3 盘头螺丝–6(包括 M3 弹性垫圈和平垫圈) 注 地线(包括螺丝)推荐以下的。
KHI 零件号码:50977 - 0151 [ 注 意 ]
长沙工控帮教育科技有限公司
D/E 系列控制器 3.现场总线接口准备 川崎机器人 通用现场总线 I/O 使用说明书
用户自行购买现场总线接口卡时,请按照如下的步骤将现场总线接口卡安装到我公司提 供的现场总线母板(1UK 板)上。
1.应用连接器的连接
将现场总线接口卡的应用连接器和 1UK 板的 CN1 连接器或 CN2 连接器相连接。关于 各连接器可连接的接口卡,请参看 6.1 节。
2.用螺丝把卡固定在 1UK 板上。
3.接着把拨码开关 1 全部设定为 OFF。
4.把装有接口卡的 1UK 板插入卡槽中。
5.用各现场总线专用电缆进行连接。
图 3.4 现场总线接口板
现场总线母板(1UK 板) 现场总线接口卡
固定螺丝
CN1
P C I 总 线 连 接 器 CC-Link
主局专用
CC-Link 主局的 接口板专用
拨码开关 1
OFF
↓ ON CN 2
FG 端子
长沙工控帮教育科技有限公司
D/E 系列控制器 3.现场总线接口准备 川崎机器人 通用现场总线 I/O 使用说明书
3-7
3.5 1UQ 板(E 控制器)
安装 PCI 卡时,使用 1UQ 板。把 INTERBUS 主卡或 PROFInet 主卡安装在 CN2 连接器上。
用户自行购买现场总线时,请按照如下的步骤把现场总线接口卡安装到我公司提供的 PCI 适配器板(1UQ 板)上。
在附近有很多噪声,用低阻抗电缆接地 1UK 板上的 FG 端子和机器人控制器 的框架。(推荐编织线。)
注 1UK 板上的 FG 端子没有螺丝。
推荐螺丝规格:M3 盘头螺丝–6(包括 M3 弹性垫圈和平垫圈) 注 地线(包括螺丝)推荐以下的。
KHI 零件号码:50977 - 0151 [ 注 意 ]
図 3.5 现场总线接口板
PCI 总线连接器
固定螺丝
INTERBUS 主卡或 PROFInet 主卡 PCI 适配器板(1UQ 板)
长沙工控帮教育科技有限公司
D/E 系列控制器 3.现场总线接口准备 川崎机器人 通用现场总线 I/O 使用说明书
1.把现场总线接口卡和 1UQ 板的 CN2 连接器相连接。
2.用螺丝把卡固定在 1UQ 板上。
3.把装有接口卡的 1UQ 板插入到 VME 卡槽中。
4.用各现场总线专用电缆进行连接。
长沙工控帮教育科技有限公司
D/E 系列控制器 4.AS 内部信号的流程和设定 川崎机器人 通用现场总线 I/O 使用说明书
4-1
4.0 AS 内部信号的流程和设定
构建现场网络需要给 AS 通信方所使用的信号号码进行分配设定。图 4.1 为 AS 的应用识 别的信号号码和实际的通过现场总线及本地 I/O 往来信号的流程例。
图 4.1 信号的流程和设定
指令
物理接口 输入信号
通道
输出信号
通道
Phoenix InterBus 卡 主接口
Phoenix InterBus 卡 从接口
连接器 1 接口用于连接 1JF/1TJ 基板上的 ANYBUS 卡
端口
端口
端口
端口
端口
端口
输入输出端口和通道的关联建立通过辅助 0608-1 信号配置进行设定。(参照 6.2 节)
用 ZSIGSPEC 指令设定各端口 I/O 的最大点数(参照第 5 章)
用户通过辅助功能 0608-2 I/O 接口分配指定的各物理 I/O 接口来 接受发送信号数据(参照 6.1 节)
长沙工控帮教育科技有限公司
D/E 系列控制器 4.AS 内部信号的流程和设定 川崎机器人 通用现场总线 I/O 使用说明书
长沙工控帮教育科技有限公司
D/E 系列控制器 5.外部输入输出信号数的设定 川崎机器人 通用现场总线 I/O 使用说明书
5-1
5.0 外部输入输出信号数的设定
ZSIGSPEC 指令是用来设定现场总线信号数量的 AS 语言。
キーワードの後には、必ず 1 文字以上の空白を作ってください。
文中的↵表示进入(回车)键。
通 例
ZSIGSPEC
关键词关键词后必须有一个以上的空格
长沙工控帮教育科技有限公司
D/E 系列控制器 5.外部输入输出信号数的设定 川崎机器人 通用现场总线 I/O 使用说明书
第 4 章的图 4.1 中的本地端口(Output)、本地端口(Input)、主端口、从端口的信号数 量分别以 DO、DI、MAS、SLA 的顺序注册。
监视指令 ZSIGSPEC
功能
表示或设定外部输入输出信号数的最大值。
详细说明
输入 ZSIGSPEC 指令将显示信号数的当前设定值和变更查询。(参看例) MAS 表示主端口侧的信号数量,SLA 表示从端口侧的信号数量。
无任何变更时,只输入↵。
1.本指令是软件设定。因此,即使根据本指令变更最大值而不装备硬件的话也没有实际 意义。
2.请按 16 的倍数关系设定信号数量。
3.外部输入信号总数((LOCAL(DI)+MAS+SLA)和外部输出信号总数((LOCAL(DO)+MAS+SLA) 分别为最大 960 点。
4.为使输入输出信号数量的设定值做为物理现场总线接口的 I/O 数据长度时有效,请将 控制器的电源 OFF/ON。
例 1
增加主局(MAS)、从局(SLA)的信号数量时。
>ZSIGSPEC ↵
DO, DI, INT, MAS, SLA 64 64 128 32 32 变更?(结束只输入 RETURN)
,,,112,64
DO, DI, INT, MAS, SLA 64 64 128 112 64 变更?(结束只输入 RETURN)
[ 注 意 ]
使用本指令设定信号数量时,请不要使其与[辅助 0608-1]的设定 内容矛盾。与[辅助 0608-1]的内容不一致时,则不能使用本指令设 定的信号数量。(参看例 2)
长沙工控帮教育科技有限公司
D/E 系列控制器 5.外部输入输出信号数的设定 川崎机器人 通用现场总线 I/O 使用说明书
5-3
例 2
减少主局(MAS)信号数量时。
>ZSIGSPEC ↵
DO, DI, INT, MAS, SLA 32 32 128 32 32 变更?(结束仅输入 RETURN)
,,,16,48
该设定与信号配置设定矛盾。变更吗?(输入 1 执行) 错误原因
[辅助 0608-1]的设定如图 5.1,显示该设定与信号配置设定矛盾的错误信息。尽管 [辅助 0608-1]中主局的信号数被设定为 32 点,但 ZSIGSPEC 要减到 16 点,而不能达到一 致,所以显示出错信息。
处理方法 1.输入[1]时
变更信号配置信息。为了保证 I/O 通信正常,请重新设定信号配置。
2.未输入[1]时
用 ZSIGSPEC 变更外部输入输出信号数量的处理方法有 2 个。
(1)将主信号数量变更为 16 时,用[辅助 0608-1]将主信号配置变为只分摊 16 点(图 5.2)。信号配置设定的方法请参看 6.2 节。
图 5.1 辅助 0608-1 信号配置设定例
长沙工控帮教育科技有限公司
D/E 系列控制器 5.外部输入输出信号数的设定 川崎机器人 通用现场总线 I/O 使用说明书
标志范围内未 使用部分不要 输入(通道 0)。
(2)使用<全清>键,所有的通道设定为 0(图 5.3)。使用此方法时,用 ZSIGSPEC 变更外 部输入输出信号数量后,请再次更改信号配置设定。
图 5.2 辅助 0608-1 信号配置设定变更内容
图 5.3 辅助 0608-1 信号配置设定变更内容
长沙工控帮教育科技有限公司
D/E 系列控制器 6.现场总线接口分配登记 川崎机器人 通用现场总线 I/O 使用说明书
6-1
6.0 现场总线接口分配登记
现场总线接口的分配登记根据[辅助 0608-1.信号配置设定]和[辅助 0608-2.I/O 物理接 口分配]进行设定。
6.1 物理 I/O 接口和主/从端口的关联建立(辅助 0608-2)
请选择正确数字为主/从端口分配物理 I/O 接口。不使用接口板时请输入 0。使用例如下 所示。
在示教器操作画面上的下拉菜单中选择[辅助功能],显示辅助功能画面。输入辅助功能代 号 0608,按下↵,选择[2.I/O 物理接口分配]则显示如下的画面。
选择编号
1:INTERBUS-M(PHOENIX CONTACT)
视为使用 PHOENIX CONTACT 厂的 INTERBUS-VME/PCI 板。
2:INTERBUS-S(PHOENIX CONTACT)
视为使用 PHOENIX CONTACT 厂的 INTERBUS-VME 板。
3:ANYBUS 专用连接器 2
假设 AnyBus 主卡做为物理 I/O 的接口则被装在 1JF/1TJ 板的 CN2/CN4 连接器上。目 前 CN2 连接器支持的卡如下所示。
(AnyBus-M PROFIBUS、AnyBus-M DeviceNet、AnyBus-S DeviceNet、AnyBus-S PROFIBUS、AnyBus-S INTERBUS、AnyBus-M EtherNet/IP、AnyBus-S EtherNet/IP、
AnyBus-S PROFInet、1PS 板、AnyBus-S ControlNet)
长沙工控帮教育科技有限公司
D/E 系列控制器 6.现场总线接口分配登记 川崎机器人 通用现场总线 I/O 使用说明书
4:ANYBUS 专用连接器 1
假设 AnyBus PROFIBUS-MASTER 卡以外的 AnyBus 卡做为物理 I/O 接口则被装在 1JF/1TJ 板的 CN1 连接器上。AnyBus PROFIBUS-MASTER 卡以外的 AnyBus 卡与 1JF/1TJ 板的 CN1/CN3 连接器在电气上是匹配的。目前 ANYBUS 用连接器 1 支持的卡如下所示。
(AnyBus-S DeviceNet、AnyBus-M DeviceNet、AnyBus-S PROFIBUS、AnyBus-S INTERBUS、AnyBus-M EtherNet/IP、AnyBus-S EtherNet/IP、AnyBus-S PROFInet、
1PS 板、AnyBus-S ControlNet) 5:ANYBUS 专用连接器 2:1PS(2 ms)
假设 1PS 板做为物理 I/O 接口则被装在 1JF/1TJ 板的 CN2 连接器上。相比选择 3/4 时,输入输出信号处理间隔短,但处理负荷变大。
6:ANYBUS 专用连接器 1:1PS(2 ms)
假设 1PS 板做为物理 I/O 接口则被装在 1JF/1TJ 板的 CN1 接插件上。相比选择 3/4 时,输入输出信号处理间隔短,但处理负荷变大。
7:1QK CC-Link 从局:1PS(2 ms)[D 控制器]
1UK CC-Link 从局:1PS(2 ms)[E 控制器]
假设 1PS 板做为物理 I/O 接口则被装在 1QK 板的 CN1 连接器上。相比选择 8 时,输入 输出信号处理间隔短,但处理负荷变大。
8:1QK ANYBUS 专用连接器[D 控制器]
1UK ANYBUS 专用连接器[E 控制器]
假设 AnyBus 板或 1PS 板做为物理 I/O 接口则被装在 1QK 板的 CN1 连接器上。
(AnyBus-S DeviceNet、AnyBus-M DeviceNet、AnyBus-S PROFIBUS、AnyBus-S INTERBUS、AnyBus-M EtherNet/IP、AnyBus-S EtherNet/IP、1PS 板)
9:1QK 连接器 2(CC-Link 主局)[D 控制器]
1UK 连接器 2(CC-Link 主局)[E 控制器]
假设 CC-Link 主板做为物理 I/O 接口则被装在 1QK 板的 CN2 连接器上。
10:DeviceNet 从局专用
假设 AnyBus-S DeviceNet 做为物理 I/O 接口则被装在 1JF/1TJ 板的 CN2 连接器上。
“不支持”显示的话,对于 1JF/1TJ 板选择 3 或 4。
11:(专用) PROFIBUS-DPV1(主局)
假设 AnyBus PROFIBUS-DPV1(主局)做为物理 I/O 接口则被装在 1JF/1TJ 板的 CN2 连 接器上。
长沙工控帮教育科技有限公司
D/E 系列控制器 6.现场总线接口分配登记 川崎机器人 通用现场总线 I/O 使用说明书
6-3
13:PROFInet 控制器(SIEMENS)
假设 CP1616 卡(SIEMENS)做为物理 I/O 接口则被装在 1UQ 板的 CN2 连接器上。
14:PROFInet 设备(SIEMENS)
假设 CP1616 卡(SIEMENS)做为物理 I/O 接口则被装在 1UQ 板的 CN2 连接器上。
6.2 信号配置设定(辅助 0608-1)
将 AS 应用信号号码(输出 1~960、输入 1001~1960)按每 16 点一组分配给 I/O 接口的中 间缓冲器 MASTER 端口、SLAVE 端口、LOCAL 端口(1GW(1HW)/1TW 板)的方法进行登记。
从示教器操作画面的下拉菜单中选择[辅助功能]显示辅助功能画面。输入辅助功能代号 0608,按下↵、选择[1.信号配置设定]则显示如下的画面。
信号号码
与实际在程序中使用的信号号码相对应。
表示了信号数可按每 16 点来设定。
!
注 意本设定内容与 ZSIGSPEC 指令设定的信号数量不一致时,当控 制器电源处于 ON 或从 PC 卡片下载数据时的确认信息显示后, 请注意随后运行的为使本设定与信号数量相符而执行的变更 处理和不下载数据的处理。
图 6.1 画面例(总信号数量 输入 96 点 输出 96 点时)
长沙工控帮教育科技有限公司
D/E 系列控制器 6.现场总线接口分配登记 川崎机器人 通用现场总线 I/O 使用说明书
端口
设定是否将每 16 点的信号号码分配给 MASTER 端口、SLAVE 端口、LOCAL 端口中的任一 个。用光标键(←/→)选择项目。有“•”标记的项目是当前被选择的项目。
通道
设定以 16 点单位的信号号码分配的 MASTER、SLAVE、LOCAL 端口的各自通道的开始位置。
用数值键输入。
通道号的一次清除功能
<全清除>是对设定的全部通道号清零。
选择<全清除>键时,出现「实行全清除吗?」的询问。
选择[是]则对全部频道号清零。请注意清零后不能恢复到原来的数据。
选择[否]则对频道号不清零,继续保持原有数据。
[ 注 意 ]
1.未使用的信号号码设定为 0 通道。但有的版本则在使用中的信号间不能设定未 使用的信号。此时,例如 128 点的信号被分配时,在信号 1 到 128 之间就不能设定 0 通道。
2.MASTER、SLAVE、LOCAL 端口的各个通道的设定范围请不要超过 ZSIGSPEC 指令 设定的各个信号数量。
3.通道的设定是每 16 点设定一个开始通道号。因此,16 点的范围内不可重复设定 通道位置。
4.输出信号和输入信号分别最大到 960 点为止,设定画面连续 8 页出现,登记时 8 页的设定内容同时被注册。
5.这些设定内容被作为系统数据保存。
长沙工控帮教育科技有限公司
D/E 系列控制器 6.现场总线接口分配登记 川崎机器人 通用现场总线 I/O 使用说明书
6-5
6.3 主端口/从端口的信号排列顺序的设定(辅助 0608-3)
现场总线中 AS 信号数据(比特)做为字节或字数据与对方装置进行通讯交换。主端口和 从端口的外部输入输出信号的信号排列顺序可用「辅助 0608-3 信号列顺序设定」来设 定。可指定的信号排列顺序有字节中的 I/O 比特位排列顺序和字中的字节排列顺序 2 种。
字节内的比特位排列顺序开头比特位选择 LSB 或 MSB 中的一个。字内的字节排列顺序选 择 LITTLE ENDIAN(从小到大)或 BIG ENDIAN(从大到小)中的一个。
1.字节内的比特位排列顺序
把 I/O 信号做为字节数据收发时,选择字节内号码最小的信号是 LSB 还是 MSB。
MSB LSB
b7 b6 b5 b4 b3 b2 b1 b0 2.字内的字节排列顺序
有 LITTLE ENDIAN(从小到大)和 BIG ENDIAN(从大到小)2 种。
例如,低位地址 0×12、高位地址 0×34 的数据被储存时:
地址 字节值 0 0×12 地址 0 的字
1 0×34 2 ・
地址 2 的字
3 ・
画面式样例 字节数据
这边是开头吗? 这边是开头吗?
LITTLE ENDIAN 时,地址 0 的字的值为 0×3412。
BIG ENDIAN 时,地址 0 的字的值为 0×1234。
接口分配号码
该画面仅表示了与各端口相对 应的 I/O 接口的分配号码。当变 更 I/O 接口分配号码时,请用辅 助 0608-2 进行。
长沙工控帮教育科技有限公司
D/E 系列控制器 6.现场总线接口分配登记 川崎机器人 通用现场总线 I/O 使用说明书
设定方法 1.关于端口
主端口/从端口用辅助 0608-2 设定的号码来表示。若辅助 0608-2 中设定了下述号码 时,则不能设定辅助 0608-3 的信号排列顺序。
1:INTERBUS-M(PHOENIX CONTACT) 2:INTERBUS-S(PHOENIX CONTACT) 2.LSB 为起始 BIT/MSB 为起始 BIT
选择 LSB 是起始 BIT,MSB 是起始 BIT 时,用选择键(←或→)移动和选择。
3.BIG ENDIAN / LITTLE ENDIAN
选择 BIG ENDIAN、LITTLE ENDIAN 时,用选择键(←或→)移动,选择。
初始值
默认值的设定根据现场总线接口卡的不同而不同,有如下所示的设定。
PROFIBUS (从)
DeviceNet (主/从)
INTERBUS
(从) 其它
比特位排列 LSB 起始 LSB 起始 MSB 起始 LSB 起始 字排列 LITTLE ENDIAN LITTLE ENDIAN LITTLE ENDIAN LITTLE ENDIAN
长沙工控帮教育科技有限公司
D/E 系列控制器 6.现场总线接口分配登记 川崎机器人 通用现场总线 I/O 使用说明书
6-7
信号排列顺序的定义(例)
外部输入输出信号是 16 点时,比特位排列顺序和字节排列顺序的关系如下所示。
Sig1 表示外部输入输出信号的第一个。
(地址 0) Sig8 Sig1
(地址 1) Sig16 Sig9
Sig16 Sig1
(地址 0) Sig16 Sig9
(地址 1) Sig8 Sig1
(地址 0) Sig1 Sig8
(地址 1) Sig9 Sig16 (地址 0) Sig9 Sig16
(地址 1) Sig1 Sig8
MSB 起始 BIT LITTLE ENDIAN
LSB 起始 BIT BIG ENDIAN
MSB 起始 BIT BIG ENDIAN
AS 内的外部信号排列
LSB 起始 BIT LITTLE ENDIAN
长沙工控帮教育科技有限公司
D/E 系列控制器 6.现场总线接口分配登记 川崎机器人 通用现场总线 I/O 使用说明书
6.4 现场总线 I/F 板的固件版本表示
确认各个现场总线 I/F 卡的固件版本时,执行 ID 命令或[辅助 0804]-[软件版本]。但不 能显示如下的现场总线接口板的固件版本。
・ PHOENIX CONTACT 厂的 INTERBUS-VME 板
版本表示以外的各个项目,请参看操作说明书或 AS 语言解说。
例 ID 命令
本例为在主端口上按装 AnyBus-M PROFIBUS 卡,从端口上安装 AnyBus-M DeviceNet 卡 的系统结构。
>ID
机器人名: FS010N-B001 轴数 6 号机编号 1 主端口: V01.000 04.06.97 版本
从端口: 1.31 版本
信号数: 输出信号 = 96 输入信号 = 96 内部信号 = 256 夹具数: 2 动作类型 : 2 伺服类型 : 2
根据负荷重量调节加减速度的功能 : OFF [软件版本]
=== AS 组 === : AS_0140030F 2006/06/02 11:31 用户 IF AS : UAS0140030F 2006/05/30 20:01 用户 IF TP : UTP0140030F 2006/05/30 20:01 手臂控制 AS : AAS0140030F 2006/05/30 20:01 用户 IF AS 信息文件 : MAS10030FJP 2006/04/20 14:39 用户 IF TP 信息文件 : MTP10030FJP 2006/04/18 19:10 手臂数据文件 : ARM0140030F 2006/04/18 18:33
=== 伺服组 === : SV_0400001C 2006/05/25 10:31
>
长沙工控帮教育科技有限公司
D/E 系列控制器 7.信号定义例 川崎机器人 通用现场总线 I/O 使用说明书
7-1
7.0 信号定义例
如例所示分配外部输入输出信号。主端口和从端口的接发信号数(ON/OFF 信息)分别为最 大 32 点,把 AS 的输出信号的 No.17~32、33~48 分配给从端口。第 17 号输出信号将从 从端口的通道 1 被送至主控制器内。
>ZSIGSPEC ↵
DO, DI, INT, MAS, SLA 64 64 128 32 32
InterBus マスタ 接口
InterBus スレーブ 接口
Local ポート
Master ポート
Slave ポート チャンネル
チャンネル
Local ポート
Master ポート
Slave ポート
ANYBUS ・ 接器 1 接口
入力信号 出力信号
マスタ 控制器
图 7.1 端口
端口
端口 端口 端口
通 道
输出信号
InterBus 主接口
InterBus 从接口
通 道
ANYBUS 连接器 1 接口
主控制器
端口 输入信号
长沙工控帮教育科技有限公司
D/E 系列控制器 7.信号定义例 川崎机器人 通用现场总线 I/O 使用说明书
长沙工控帮教育科技有限公司
D/E 系列控制器 8.错误信息 川崎机器人 通用现场总线 I/O 使用说明书
8-1
8.0 错误信息
本章对与现场总线相关的错误信息进行说明。
8.1 现场总线通信的错误
现场总线通讯可能产生的故障及其原因、对策如下所述。
(D4500):未发现现场总线接口板。
原因 :由辅助功能 0608-2 I/O 接口分配指定的接口板未被安装。
处理 :1.请切断控制器电源,把指定的接口板正确地装到规定的槽内。
2.如已安装,请检查是否进行了 I/O 接口分配。
3.请检查接口卡的 LED 指示灯。
4.请确认 1JF/1TJ 板的跳线设定。
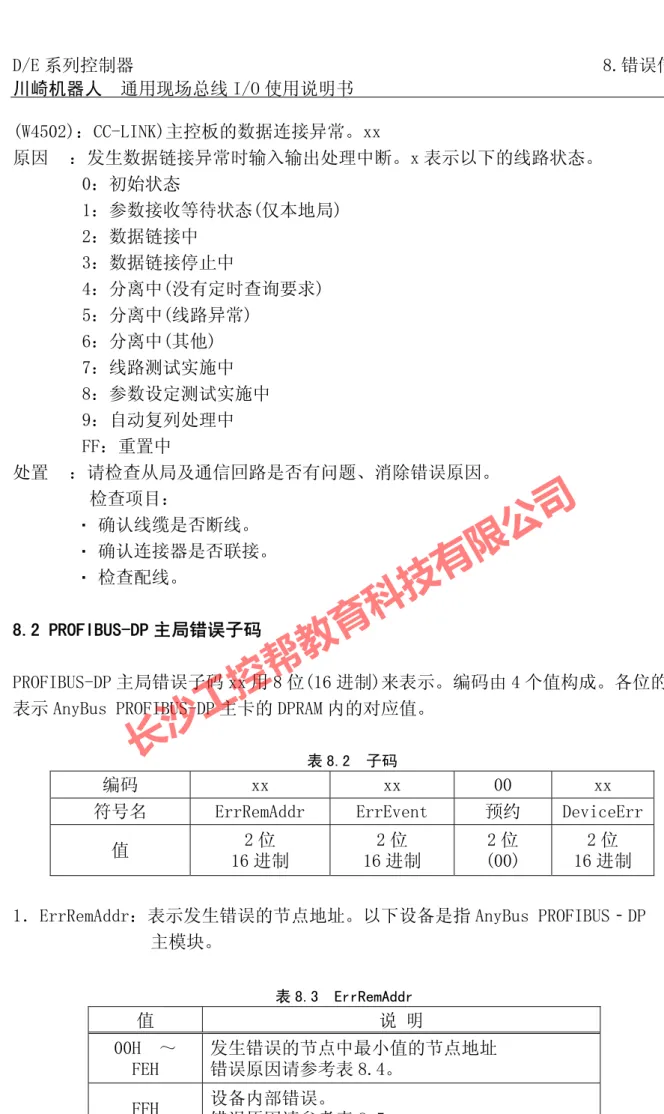
(D4501):ABMA-PDP) 接口模块失误。代码=XX
原因 :因 ABMA-PDP 模块的安装错误或故障等,造成在 ABMA-PDP 模块内可能发生错误。
Nn 表示固件的版本。Xx 表示错误子码(8 位),设备状态。
处理 :1.请检查出错代码,消除出错原因。错误代码的细节请参看 8.2 PROFIBUS-DP 主错误子码。
2.请确认 1JF/1TJ 板和接口卡的安装,把控制器的电源再次 ON。
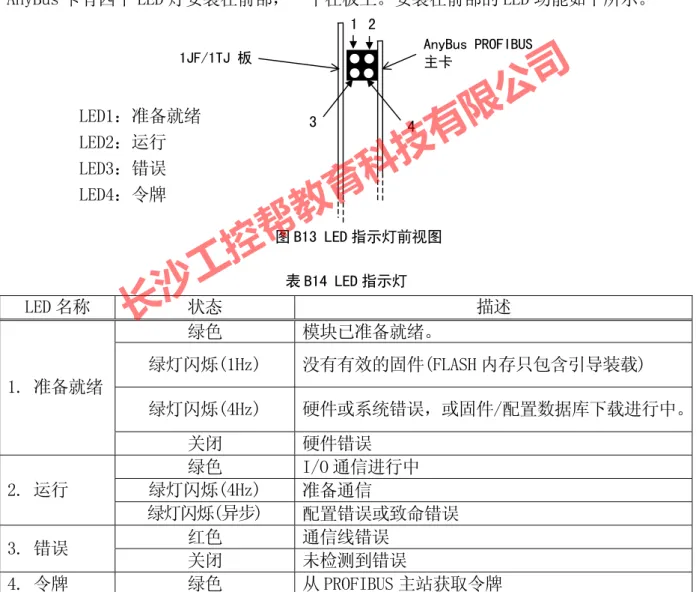
3.再次出现错误信息时,请检查接口卡的指示灯(LED1.就绪)是否灭灯。亮灯 时,重新进行配置,灭灯时,请咨询接口卡片生产厂。(关于 LED 指示灯请参 看 B3.4 章。)
(D4502):FIELD-BUS-INIT) 错误应答。代码=XX
原因 :启动时为了建立与主局或从局的通信通路,向现场总线接口卡输送的信息存在 缺陷等原因而收到错误的应答信息。
处理 :1.请检查接口卡的 LED 指示灯,必须与主局的 I/O 数据长度保持一致。
2.请将控制器的电源 OFF/ON。
3.请检查现场总线电缆。
4.错误信息不消失时,请发送 xx(问题代码)。
5.请确认是否超过了各个现场总线接口卡所能处理的最大 I/O 数据长。
长沙工控帮教育科技有限公司
D/E 系列控制器 8.错误信息 川崎机器人 通用现场总线 I/O 使用说明书
(D4503):FIELD-BUS-INIT) 应答超时。代码=XX
原因 :由于硬件不正常等原因,启动时接口板初始化中在指定的时间内没有应答信息。
处理 :1.请检查接口卡的 LED 指示器、并调查主从局及通信路径是否有问题,如线缆 是否脱落、主局或从局的 I/O 数据长是否合适等,然后清除出错原因。
2.请将控制器电源 OFF/ON。
3.错误信息不消失时,请发送 xx(问题代码)。
(D4504):ANYBUS) OUT/FB.CTRL 请求超时。代码=XX
原因 :硬件故障的原因,输入信号信息的数据区域读取要求未被接受。
处理 :1.请检查接口卡的 LED 指示灯,复位错误。
2.错误信息不消失时,请发送 xx(问题代码)。
(E1004):INTER-bus 板未准备好。
原因 :启动时,在一定时间内 INTER-bus 板没准备好。
处置 :1. 关闭控制器电源,然后再开启。
2. 检查连接到板的电缆。
3. 检查拨码开的设定。
(E1013):INTER-BUS 板未安装。
原因 :在卡槽里没有 INTER-bus 板。
处置 : 1. 将 INTER-bus 板安装在卡槽里。
2. 确认 INTER-bus 板确实被安装。
3. 检查拨码开的设定。
(E1018):INTER-BUS 状态错误。
有位置的xx1.xx2信息时:
原因 :通信电缆有问题。数值指示错误发生的从装置位置,按照网络结构数值变化。
例 3.1指示,Bus Segment为3,Device为1。
处置 :按照错误发生的情况,检查以下项目。
1. 没有电缆断开吗?
2. 从装置没有问题吗?
3. 波特率的设定没有问题吗?