Travel Time Prediction for Urban Networks: the
Comparisons of Simulation-based and Time-Series Models
Ta-Yin Hu
Department of Transportation and Communication Management Science.
National Cheng Kung University, No.1, Ta-Hsueh Road, Tainan 701, Taiwan, R.O.C.
TEL: 886-6-2757575-53224, FAX: 886-6-2753882, E-mail: [email protected] Wei-Ming Ho
Department of Transportation and Communication Management Science.
National Cheng Kung University, No.1, Ta-Hsueh Road, Tainan 701, Taiwan, R.O.C.
TEL: 886-6-2757575-5010, E-mail: [email protected]
ABSTRACT
Travel time prediction for urban networks is an important issue in Advanced Traveler Information Systems (ATIS) since drivers can make individual decisions, choose the shortest route, avoid congestions and improve network efficiency based on the predicted travel time information. In this research, two algorithms are proposed to estimate and predict travel time for urban networks, the simulation-based and time-series models. The simulation-based model, DynaTAIWAN, designed and developed for mixed traffic flows, is adopted to simulate the traffic flow patterns. The Autoregressive Integrated Moving Average (ARIMA) model, calibrated with vehicle detector (VD) data, is integrated with signal delay to predict travel time for arterial streets. In the numerical analysis, an arterial street in Kaohsiung city in Taiwan is conducted to illustrate these two models. The empirical and historical data are used to predict and analyze travel time, including: travel time data from survey and historical speed data from vehicle detector (VD).
INTRODUCTION
With the development of modern technologies in Intelligent Transportation Systems (ITS), the
route guidance with predicted travel time is an important issue, especially in Advanced
Traveler Information System (ATIS) [1]. Travel time is a key factor that can influence
drivers’ behavior, and can let travelers understand what kind of traffic situations they are
going to encounter while traveling [3]. Travel time is defined as the time required to travel
along a route between any two points within a traffic network [2][4].
With the development of new technologies, many instruments can be utilized to collect the traffic data, such as global positioning system (GPS), automated vehicle identification (AVI), and vehicle detector (VD). The travel time data can be directly/indirectly predicted through these technologies. Travel time can be estimated and predicted directly by using probe vehicles, license plate matching, electronic toll stations, and automatic vehicle identification (AVI) etc.; travel time can also be estimated and predicted indirectly by vehicle detectors (VD) [5].
Several approaches have been proposed for travel time estimation and prediction. Most of the statistical-based algorithms are based on the applications of regression, bayesian and time series models [6] [7] [8]. The models are based on historical/real time data to forecast the travel time. In general, the algorithms are easy to implement, but purely statistical-based algorithms may result in poor performance during abnormal traffic conditions [9]. The simulation-based method used traffic simulation software and can integrate other algorithms such as Kalman filter model and traffic flow theory model to simulate the traffic pattern [10].
Several empirical studies show that the extensive data needs to be collected for the model validation [3]. In summary, how to apply these algorithms under different traffic situations is still a critical issue and so far there is no conclusive evidence to demonstrate the best algorithm for travel time estimation and prediction.
This paper presents a simulation-based model and a time-series model for travel time estimation and prediction for urban networks. The simulation-based model, calibrated based on VD flow data, uses simulated vehicle trajectories to generate travel time information.
The ARIMA model, calibrated based on time-series data, is integrated with signal delay for travel time prediction. The simulation-based model is easy to be implemented with possible applications for normal and abnormal traffic conditions. The main advantage of ARIMA is its efficiency for short-term predictions.
The research framework for travel time prediction includes overall framework, simulation-based and time-series framework are described in next section. Numerical experiments and results are discussed in Sections 3 and 4, followed by brief summary.
RESEARCH FRAMEWORK
OVERALL FRAMEWORK
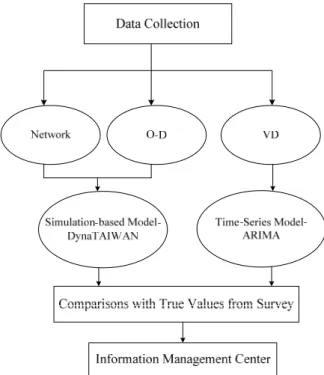
The overall framework of travel time estimation and prediction model is shown in Figure 1.
The collected input data sets for travel time model include network, O-D flows, and VD data.
The simulation-based model is calibrated based on the network and O-D data and the
time-series model is calibrated based on the historical data from VD. The true travel time values for validation are collected through probe vehicles.
Figure 1. The Overall Framework
SIMUALTION-BASED MODEL
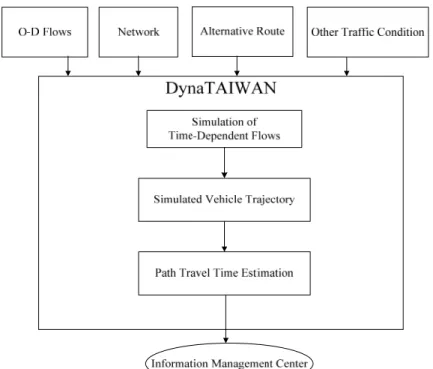
The framework of simulation-based travel time estimation and prediction is shown in Figure 2.
The input data sets for travel time model include O-D flows, network, alternative routes and
other traffic conditions. The time-dependent flow can be simulated through DynaTAIWAN,
and route travel time can be calculated based on the vehicle trajectory data.
Figure 2. The Conceptual Framework of Simulation-based Model
The travel time is directly calculated by averaging the travel time of vehicles start from origin node to destination node for each time interval, as described in the following equation:
k r s
s r k I
1 i
i s r k v
s r
k I
t T
, , , , ,
,
(1)
Where,
v s r
Tk,,
is the vehicle-based average travel time from origin node r to destination node s during time interval k, and
i s r
tk,,
is the average travel time of i vehicle from origin node r to destination node s during
thtime interval k.
The features of simulation-based model are summarized as follows:
(1) the algorithm is reliable since the vehicle trajectory is obtained through simulation.
(2) The vehicle trajectory data is managed through relational data base management systems , such as Access, thus travel time information can be retrieved easily, as shown in Figure 3.
(3) The travel time, travel distance, and standard deviations from each origin to each can be obtained by identifying k the origin and destination numbers in database.
(4) The dynamic O-D estimation and prediction process needs to be incorporated with the
simulation model in order to obtain reliable simulation results.
Figure 3. The Simulation-based Database
TIME-SERIES MODEL
In time series analysis, an ARIMA model is a generalisation of an autoregressive moving average (ARMA) model. The common approaches for modeling univariate time series includes the autoregressive (AR) and the moving average (MA) models, and the ARIMA is a model after the combination of two models. The meaning of “I” in ARIMA model is
“Integrated”, and it means the time-series are differenced. ARIMA model can be applied to stationary time series, when the time series are non-stationary, they should be differenced.
These models are fitted to time series data either to better understand the data or to predict future points in the series.
The model is generally referred to as an ARIMA(p,d,q) model where p, d, and q are integers greater than or equal to zero and refer to the order of the autoregressive, integrated, and moving average parts of the model respectively.
The AR, MA, and ARMA model can be expressed as follows:
AR Model: Z
t
1Z
t1
2Z
t2 ...
pZ
tp a
t(2)
MA Model: Z
t a
t
1a
t1
2a
t2 ...
qa
tq(3)
ARMA Model: Z
t
1Z
t1
2Z
t2 ...
pZ
tp a
t
1a
t1
2a
t2 ...
qa
tq(4) Where,
Z : time series
t
: constant a
t: white noise : the mean
p
1
...
, ... : parameters of the model
1
qp: the order of the AR model
q: the order of the MA model
The determinations of p and q value in the ARIMA(p,d,q) model are based on the ACF and PACF index. They are briefly introduced below:
AR(p): ACF gradually tails off, and the PACF cuts off at time lag k when k > p.
MA(q): ACF cuts off at time lag k when k > q, and the PACF gradually tails off.
ARMA(p,q): Both ACF and PACF gradually tail off. The ACF exponentially tails off when the time lag is at q-p, and PACF tails off when the time lag is at p-q.
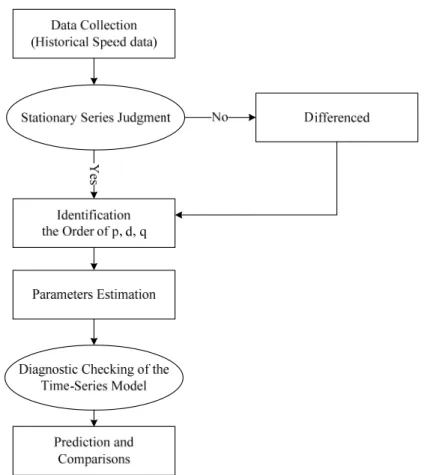
The procedure of time-series model is shown in Figure 4. The historical speed data are collected as the basic time series in the ARIMA model. If the historical time series are stationary, the order of p, d, q of the model can be identified initially, or the data needs to differenced before identification. The parameters of the ARIMA model can be estimated and diagnosed to check the parameters of the model and to determine the final time-series formulations. The final model can be applied to predict the objective time series and compared with the true value to verify the accuracy of the model.
Figure 4. The Procedure of Time-Series Model
MEASUREMENT CRITERIA
The MAPE indexes is applied to measure the performance of the models, the indexes is
calculated as in (5). The interpretation of MAPE index is shown in Table 1 [11].
) % (
) ( )
( 100
k x
k x k x M MAPE 1
M
1 k
(5)
Where,
M:the number of samples )
(k
x : the real values )
(k
x :the estimated values
Table 1. The Interpretation of MAPE Index [11]
MAPE (% ) Interpretation
<10 Highly accurate forecasting 10-20 Good forecasting 20-50 Reasonable forecasting
>50 Inaccurate forecasting
NUMERICAL EXPERIMENTS AND RESULTS
NETWORK CONFIGURATION
Numerical experiments are conducted for an arterial street in Kaohsiung city in Taiwan to illustrate these two models. The arterial street selected (the East bound and West bound) is located in the CBD with heavy traffic. The arterial street is shown in Figure 5. The East bound is from tag A to B and the node number is from 2616 to 5142. The West bound is from tag B to A and the node number is from 5142 to 2616. There are 8 intersections and 2 ramps in this arterial street.
Figure 5. The Arterial Street in the Experiments
DATA COLLECTION
The empirical travel time data is summarized in Table 2. The data is used in the comparison
process for the simulation-based model and the ARIMA model. The data is gathered from
7:30~8:00 AM in August 19, 2009.
Table 2. The Travel Time Data
1 2 3 Average Travel Time Stander Deviation East bound: 2616→5142 6.73 7.23 6.93 6.97 0.31
West bound: 5142→2616 6.33 6.43 6.9 6.56 0.15
(Unit: min)
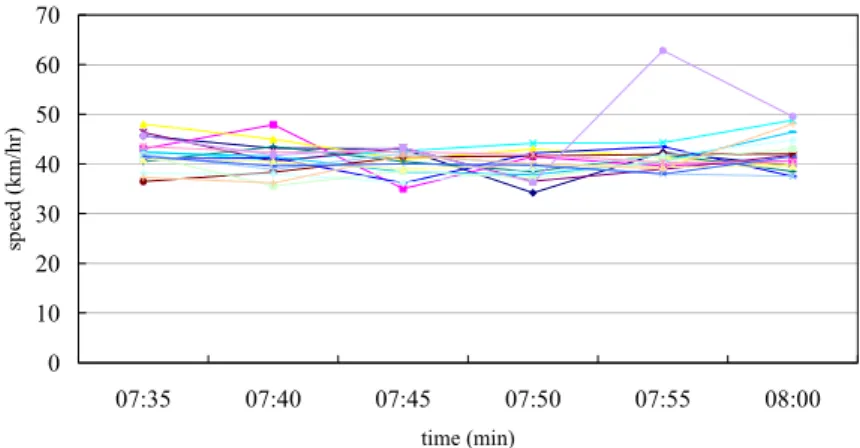
The historical speed data from 7:30~8:00 AM for 17 days is illustrated in Figure 6. The speed data is collected through VDs and the data is used in time series analysis.
Speed Temporal Distributions
0 10 20 30 40 50 60 70
07:35 07:40 07:45 07:50 07:55 08:00
time (min)
speed (km/hr)
Figure 6. The Temporal Distributions of Speed for 17 days
RESULTS ANALYSIS
Simulation-based Model
In order to observe the system performances under different demand levels, several loading factors are tested. The loading factor is defined as the ratio of the total number of vehicles generated in the network during the simulation period. The loading factors are tested from 0.5 to 0.9. The results show that the average travel time increases with respect to the loading factor. The results are shown in Table 3.
Table 3. The Predicted Travel Time with Simulation-based Model
Loading Factor 0.5 0.6 0.7 0.8 0.9 East Bound: 2616-5142 4.38 5.19 6.18 7.39 8.35 West Bound: 5142-2616 6.35 8.58 13.73 10.16 13.15
(Unit: min)
The empirical travel time data is compared with the predicted travel time by simulation-based model. The results are shown in Table 4. The results show that some MAPES values are less than 10%. For West bound prediction, the loading factor of 05 is more appropriate.
For East bound prediction, the loading factors of 0.7 and 0.8 are more appropriate. The
results indicate that time-dependent O-D demand data is very important in the simulation
model.
Table 4. The MAPE Values Comparisons with Simulation-based Model
Loading Factor 0.5 0.6 0.7 0.8 0.9 East Bound: 2616-5142 45.46% 96.24% 8.95% 2.53% 27.32%West Bound: 5142-2616 0.67% 62.20% 783.67% 197.56% 662.01%
Time-series Model
The signal cycle data are collected and used to calculate the expected delay for 8 intersections and 2 ramps, and the total expected delay is about 264.5 seconds. The time-series travel time prediction model is calibrated based on the 17 days’ historical speed data. The predicted travel time is basically calculated by the summation of the lengths for each links on the objective street divided by the predicted average speed. The ACF and PACF values for East bound and West bound streets are shown in Figure 7. The orders of the ARIMA model are listed in Table 5 and the models used are ARIMA(1,1,1) for East bound street and ARIMA(2,0,1) for West bound street.
a.
1 2 3 4 5 6 7 8 910 11 12 13 14 15-1.0 -0.5 0.0 0.5 1.0
ACF
AVEG
b. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
落後數 -1.0
-0.5 0.0 0.5 1.0
AVEG
c.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15-1.0 -0.5 0.0 0.5 1.0
ACF
AVEG
d. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
-1.0 -0.5 0.0 0.5 1.0
AVEG
Fig 7. Time-Series Model Parameters.
a. ACF for East bound street. b. PACF for West bound street.
c. ACF for East bound street. d. PACF for West bound street.
Table 5. The Order of the ARIMA Model
Time-Series Model, ARIMA(p,d,q)Parameters p d q (p,d,q)
East Bound: 2616-5142 1 1 1 (1,1,1)
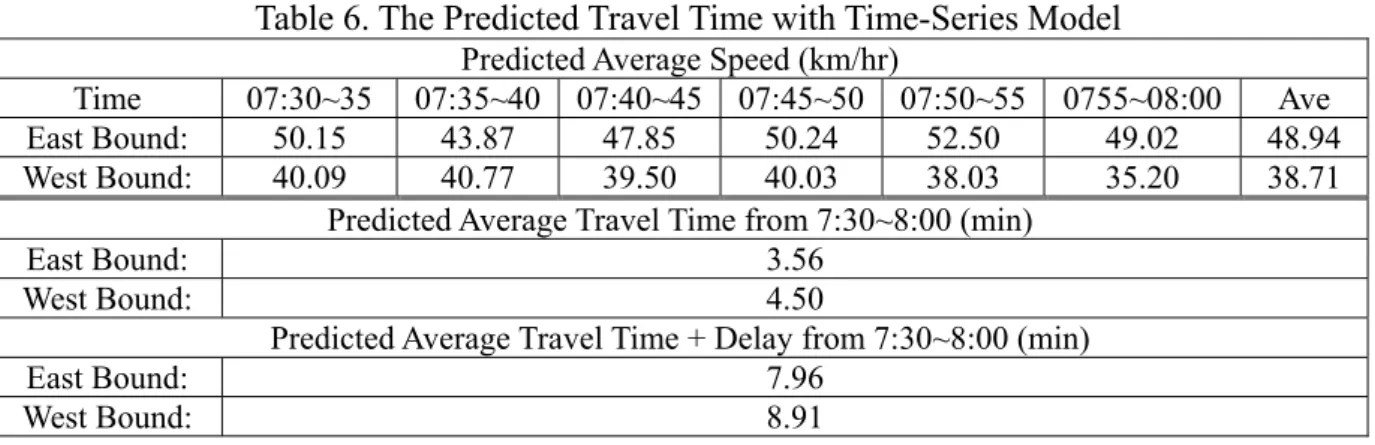
The predicted speed from 7:30~8:00 and average values on East bound street and West bound street are shown in Table 6. It shows that the time-series model can predict the travel time reasonably if the signal delay is included. The speed data from VDs does not able to reflect signal delay and possible reasons might be the location of installed VD.
Table 6. The Predicted Travel Time with Time-Series Model
Predicted Average Speed (km/hr)Time 07:30~35 07:35~40 07:40~45 07:45~50 07:50~55 0755~08:00 Ave East Bound: 50.15 43.87 47.85 50.24 52.50 49.02 48.94 West Bound: 40.09 40.77 39.50 40.03 38.03 35.20 38.71
Predicted Average Travel Time from 7:30~8:00 (min)
East Bound: 3.56
West Bound: 4.50
Predicted Average Travel Time + Delay from 7:30~8:00 (min)
East Bound: 7.96
West Bound: 8.91
The best results from the simulation-based model and the ARIMA model are compared and the results are summarized in Table 7. Through these results, the simulation-based model shows possible potential for travel time prediction; however, the time-dependent O-D demand is still a crucial issue in applying the simulation-based model. For normal traffic conditions, the ARIMA model could also have reasonable results and the simulation-based model is applicable for abnormal traffic conditions.
Table 7. The Travel Time Comparisons
Model ARIMA DynaTAIWAN True Value
East Bound 7.96 7.39 6.97
West Bound 8.91 6.35 6.56
(Unit:min)

![Table 1. The Interpretation of MAPE Index [11]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9248485.509109/7.892.107.789.759.950/table-interpretation-mape-index.webp)