國立臺灣大學工學院土木工程學系 碩士論文
Department of Civil Engineering College of Engineering
National Taiwan University Master Thesis
無線感測網路
應用於施工架預警系統之研究 Research of Wireless Sensor Network Applied to Scaffold’s Alarming System
李昕諺 Hsin-Yen Lee
指導教授:曾惠斌 博士 Advisor: Hui-Ping Tserng, Ph.D
中華民國 105 年 5 月
誌謝
當口試結束之後,表示研究所的日子漸漸走向尾聲了,在這兩年學習的過程之 中,有許多人用屬於他們自己的方式幫助和支持我,才能讓這篇論文如此順利完成。
此時,正是表達感謝之意的時候。
首先誠摯感謝指導教授曾惠斌老師的細心指導,不僅讓我領略學術領域的嚴 謹和風采,使得論文可以趨於完善且順利完成,更在人生方向上給予許多寶貴建議,
讓我更加了解未來的寬廣和確認自己努力的方向。能夠在老師門下學習,收穫良多,
終生受用。
感謝日前遠在美國交換的黃泓睿學長,在設備開發遇到瓶頸時,給予我許多技 術上的指導和幫助,才能如此快速了解問題的核心和順利克服困難;感謝學妹李冠 儀,擔任我的實驗幫手,在烈日之下,一起進入工地和爬著數也數不清的施工架,
才能讓實驗如此順利的完成,亦在展示影片拍攝上,給予大力的幫忙,使得影片能 夠快速完成,祝福妳未來研究順順利利,完成自己的目標。
再來感謝同為曾老師門下的林楷倫同學和同為 714 研究室的同學們,楷倫是 研究室最認真的好同學,熱心負責組上的事務和處理眾多事情,讓人可以安心專注 於研究上。感謝劉韋村同學和洪子傑同學對於設備展示的方式和影片拍攝的方式 給予我許多有用的建議。感謝同一個研究室所有的同學們,雖然大家擁有不同方向 的題目,但是一同朝著畢業的目標前進,互相激勵彼此,切磋學藝和關心的情誼已 經深深印入腦海之中,祝福大家能夠順利達到自己設下的目標。
最後我要感謝父母的細心照料,讓我能夠在經濟無憂的情況之下,順利從台大 研究所畢業。不管我做出什麼樣的決定,父母總是全力支持和給予數也數不清的珍 貴建議,也要感謝我大學時期的好朋友們,雖然大家各自在不同的研究領域努力,
但是在我遇到瓶頸的時候,給予我許多鼓勵,尤其是在電機相關領域的同學們給予 我許多技術的指導,也要感謝我漂亮的女朋友和我一起為了技師努力,在我遇到低 潮的時候,給我鼓勵和傾聽我心情煩躁的碎念。在許多人幫助之下,這篇論文終於 順利的完成。
中文摘要
施工架為營造業最廣泛使用的臨時結構物,不管是在興建過程或是結構體使 用與維護階段,都需要透過搭設施工架來方便施作人員進行施工或是支撐結構物。
雖有專業人員進行結構檢核,但因憑藉著工人的經驗組立加上施工架數量眾多等 原因,導致安全及品質管理不易,使得施工架災害頻傳。
近年來無線傳輸技術快速發展,其中無線感測網路為一項重要傳輸技術,有別 於有線傳輸技術依靠管線傳輸電源及訊號,需要規劃及安裝管線,無線感測網路只 要確認無線傳輸的訊號穩定和電源供應方式,結合適當感測器,即可建立一套完整 無線感測系統,並且擁有快速安裝、重複使用及低成本等優點。
為了保護施工架現場的人員,本研究目的將無線感測網路導入營建業中,建立 一套即時多項目預警系統及設備,應用於預防施工架災害上,不僅導入WSN 相關 技術,同時結合拉線式位移計、應變規及應變訊號放大器、辨色式模組、雷射模組 及磁簧模組等多種感測器,能夠有效率地監測施工架的安全性,為了能夠在監測系 統偵測到施工架有倒塌之虞,快速通知到施工人員及管理人員,本研究應用WSN 結合各式警報器開發出無線警示系統及設備,警報設備、隨身警報設備、E-mail 通 知設備等三種警報設備進行疏散現場工作人員及通知管理人員做出應變處理,以 期降低施工架意外發生的可能性及嚴重性,在監測施工架安全性及快速通知現場 人員的同時,達到安裝省時、成本低廉及重複使用性高等優勢。本研究實測部分分 成無線設備與有線設備之量測結果進行校正和比較、戶外無線傳輸距離的測試,最 後在高雄凹子底捷運旁的興建工地進行實測,並依照實測過程與結果提供後續研 究建議及研究方向。
關鍵字:無線感測網路、Arduino、施工架預警、監測系統
Abstract
In construction projects, scaffolds are the most commonly used equipment. However, the scaffolds are assembled and installed by worker’s experience. Besides, the quantity of scaffold is numerous in the construction site. Since it is difficult to maintain the quality of scaffold and replace the defect scaffold on-time, scaffold disaster frequently happens every year. By using wires, traditional monitoring system supplies the power and connects the signal information with the control. The wires are usually distributed on the construction site during construction process. Therefore, it needs high cost for wired system’s establishment and longtime installation.
In order to ensure the safety of scaffold system and protect workers from scaffold disaster, this study tends to build a real time early-alarming system to detect the safety of scaffold system. There are some differences between Wireless Sensor Network (WSN) and wired system. First, WSN can be established if the power supplying and the signal transmission are confirmed. Besides, WSN is suitable to build an early-alarming system.
WSN technique applied to scaffold early-alarming system is aimed to achieve the advantages of low cost, short installation time and portable.
This research will focus on selection and development of hardware and software.
Arduino UNO and Xbee module are chosen as the elements of end device. Strain gage, cable-displacement transducer, laser module and magnetic reed module are adopted as the sensor to monitor the safety of scaffold system. Three kinds of wireless alarming devices are developed in this research to keep workers away from scaffold quickly when the devices receive the warning information. The experiments of the research are divided into three parts. First, compare the measurement results of wireless device with wired one and adjust the wireless device. Second, measure the transmission distance of Xbee modules and Xbee Pro modules outdoor. Finally, install and test the wireless scaffold early-alarming system in the construction site nearby Kaohsiung MRT Aozihdi Station.
Based on the results of the research, this study provides suggestions and orientations for future prospect.
目錄
口試委員會審定書 ... i
誌謝 ... ii
中文摘要 ... iii
Abstract ... iv
目錄 ... v
圖目錄 ... viii
表目錄 ... xiii
第一章 緒論 ... 1
1.1 研究背景與動機 ... 1
1.2 研究目的及範圍 ... 3
1.3 研究架構與流程 ... 3
第二章 文獻回顧 ... 6
2.1 無線感測網路 ... 6
2.1.1 無線感測網路架構概述 ... 6
2.1.2 無線通訊協定比較 ... 9
2.2 施工架 ... 11
2.2.1 施工架種類及用途 ... 11
2.2.2 框式施工架強度標準、破壞原因 ... 13
2.2.3 施工架監測方法及警戒值設定 ... 16
2.3 無線監測系統應用於施工架災害預防之研究 ... 19
2.4 小結 ... 20
第三章 無線預警系統開發 ... 21
3.1 無線感測節點開發 ... 21
3.1.1 介面控制板 ... 21
3.1.2 傳輸模組 ... 26
3.2 無線監測系統開發 ... 28
3.2.1 應變規與應變訊號放大器 ... 29
3.2.2 拉線式位移計 ... 30
3.2.3 影像辨識模組 ... 32
3.2.4 雷射發射器及雷射接收器 ... 34
3.2.5 雷射模組與磁簧模組 ... 35
3.3 無線警報系統開發 ... 37
3.3.1 警報通知設備 ... 37
3.3.2 隨身警報設備 ... 38
3.2.3 EMAIL 通知設備 ... 40
3.4 系統運作流程圖 ... 42
3.5 小結 ... 43
第四章 無線預警系統實測 ... 44
4.1 無線預警系統校正實驗 ... 44
4.1.1 無線預警系統類比轉數位訊號計算 ... 44
4.1.2 無線監測系統與有線設備校正 ... 45
4.2 無線預警系統傳輸距離實驗 ... 50
4.3.1 工地環境下傳輸距離測試 ... 56
4.3.2 無線預警系統安裝之情況 ... 59
4.3.3 無線預警系統測試 ... 65
4.4 無線預警系統綜合分析 ... 68
4.5 小結 ... 70
第五章 結論與建議 ... 71
5.1 結論 ... 71
5.2 建議及後續研究 ... 73
參考文獻 ... 74
圖目錄
圖 1.1 營造業之職災死亡媒介物 ... 1
圖 1.2 論文架構圖 ... 5
圖 2.1 感測節點架構圖(Akyildz, et al., 2002) ... 6
圖 2.2 多跳式網路 ... 8
圖 2.3 網路拓樸架構圖 ... 8
圖 2.4 框式施工架型式((A)、(B)和(C)為簡易式,(D)為標準施工架)(吳孟霏,2012) ... 11
圖 2.5 模板施工架結構示意圖(彭瑞麟, 2001) ... 12
圖 2.6 外牆施工架結構示意圖(彭瑞麟, 2001) ... 13
圖 2.7 立柱受軸向壓力示意圖(陳緯宣, 2011) ... 14
圖 2.8 CNS4750 框式施工架構件之名稱 ... 14
圖 2.9 基本單元體(高鈺均, 1998、林朝琴, 2000) ... 16
圖 2.10 基本單元荷重曲線(高鈺均, 1998、林朝琴, 2000) ... 17
圖 2.11 施工架挫屈破壞模式(林朝琴, 2000) ... 18
圖 2.12 系統破壞模式(林朝琴, 2000) ... 18
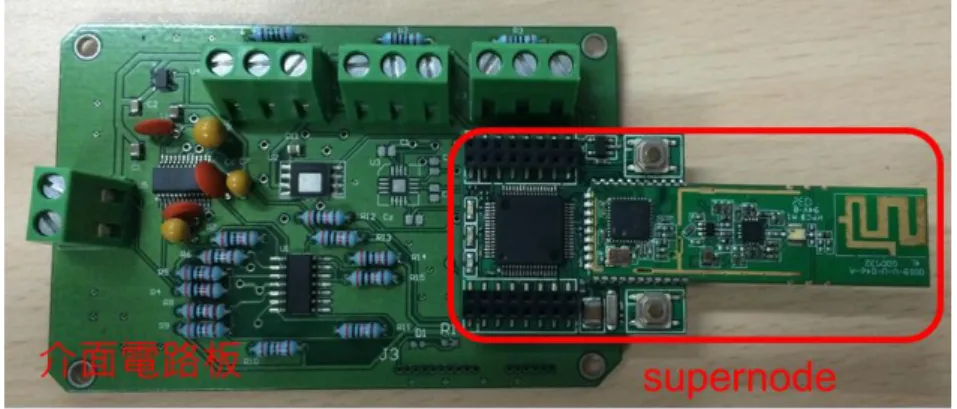
圖 2.13 supernode 及搭配使用介面電路板 ... 19
圖 2.14 LabVIEW 接收畫面 ... 19
圖 3.1 Arduino UNO 介面控制板 ... 24
圖 3.3 Arduino IDE software ... 25
圖 3.4 XBee 傳輸模組 ... 26
圖 3.5 XBee 底座 ... 26
圖 3.6 XBee 腳位圖(XBee datasheet) ... 27
圖 3.7 X-CTU 軟體 ... 27
圖 3.8 End Device ... 28
圖 3.9 FLA-3-11-3L 應變規 ... 29
圖 3.10 Wheatstone 電橋 1/4 橋接 ... 29
圖 3.11 應變訊號放大器 ... 30
圖 3.12 應變訊號放大器與感測節點結合 ... 30
圖 3.13 拉線式位移計 ... 31
圖 3.14 拉線式位移計與無線感測節點結合 ... 31
圖 3.15 影像辨識模組硬體組成 ... 32
圖 3.16 監測概念示意圖 ... 33
圖 3.17 辨色式模組與無線感測節點結合 ... 33
圖 3.18 雷射模組 ... 34
圖 3.19 雷射發射器 ... 34
圖 3.20 雷射接收器與無線感測節點結合 ... 35
圖 3.21 施工架三軸圖 ... 36
圖 3.22 雷射模組、磁簧模組與感測節點結合 ... 36
圖 3.23 XBee Pro ... 37
圖 3.24 警報通知設備 ... 38
圖 3.25 Arduino UNO 隨身警報設備 ... 39
圖 3.26 Arduino Micro ... 39
圖 3.27 Arduino micro 隨身警報設備正面及背面 ... 39
圖 3.28 Arduino Yun ... 40
圖 3.29 XBee 與 Arduino Yun 結合 ... 41
圖 3.30 Arduino Yun 運作情況 ... 41
圖 3.31 e-mail 傳輸到指定的信箱 ... 41
圖 3.32 系統運作流程圖 ... 42
圖 4.1 黃銅片試體 ... 46
圖 4.2 有線設備實驗情況 ... 46
圖 4.3 無線設備實驗情況 ... 46
圖 4.4 應變監測設備與 TC-32K 量測結果對照圖 ... 47
圖 4.5 位移監測設備和百分表實驗情況 ... 47
圖 4.6 位移監測設備和百分表量測結果對照圖 ... 48
圖 4.7 辨色式設備測試情況 ... 48
圖 4.8 辨色式設備對準綠色標的物 ... 49
圖 4.11 磁鐵距離磁簧開關測試情況 ... 50
圖 4.12 當磁簧開關形成通路時黃色 LED 亮燈情況 ... 50
圖 4.13 磁簧開關和無線感節點結合 ... 51
圖 4.14 測試地點 ... 52
圖 4.15 XBee 傳輸模組測試情況 ... 52
圖 4.16 XBee Pro 傳輸模組測試情況 ... 52
圖 4.17 利用布捲尺量測距離情況 ... 53
圖 4.18 警報設備移動之情況 ... 53
圖 4.19 工地現況 ... 55
圖 4.20 建物內部情況 ... 55
圖 4.21 監測範圍 ... 55
圖 4.22 建物側視圖及點位標位圖 ... 57
圖 4.23 建物上視圖及點位標位圖 ... 57
圖 4.24 A0 點位放置警報通知設備 ... 58
圖 4.25 A1 點位放置磁簧監測設備 ... 58
圖 4.26 A4 點位放置磁簧監測設備 ... 58
圖 4.27 應變監測設備安裝於施工架現場 ... 60
圖 4.28 位移監測設備安裝結構體上 ... 60
圖 4.29 應用扣環和圓形鐵環固定於施工架上 ... 61
圖 4.30 影像辨識設備及雷射設備安裝施工現場 ... 61
圖 4.31 影像辨識安裝板與標靶 ... 62
圖 4.32 雷射發射器安裝版及改良後的雷射接收盒 ... 62
圖 4.33 磁簧模組安裝於上下層施工架結合處 ... 63
圖 4.34 雷射模組安裝上下層施工架 ... 63
圖 4.35 警報設備放置於施工架系統中心點上 ... 64
圖 4.36 設備安裝位置圖 ... 64
圖 4.37 使用者配戴隨身警報設備 ... 66
圖 4.38 測試點位示意圖 ... 66
圖 4.39 使用者到 A0 點位 ... 67
圖 4.40 使用者到 A3 點位 ... 67
表目錄
表 1.1 103 年及 99~103 年營造業重大職災死亡人數統計表 ... 2
表 2.1 無線通訊協定比較表 ... 10
表 2.2 CNS4750 對立柱強度相關規定 ... 15
表 3.1 Arduino 硬體規格 ... 23
表 4.1 工地基本資料 ... 54
表 4.2 點位直線距離及成功率表 ... 59
表 4.3 無線設備代號對照表 ... 64
表 4.4 隨身警報設備接收成功率表 ... 67
表 4.5 各監測設備綜合分析表 ... 69
第一章 緒論
1.1 研究背景與動機
根據行政院勞動部職業安全衛生署民國99 到 103 年資料顯示(表 1.1),近五年 營造業之職災死亡人數為899 人,在民國 103 年營造業死亡人數更是高達 203 人,
營造業之職災死亡原因為墜落、滾落為主,其次為物體倒塌及崩塌,而墜落、滾落 死亡之媒介物之中,施工架所占18.3%(圖 1.1);物體倒塌及崩塌死亡之媒介物,施 工架所占高達38.5%(圖 1.1),由於施工架為土木工程最常用的臨時結構物,在營建 過程,做為支撐模板進行混凝土澆置工程及進行外牆裝修工程等,或是在結構體使 用與維護階段,進行外牆整修工程,都需要透過搭設施工架來方便施作人員進行施 工,但是施工架屬於假設工程,有著使用完之後就拆除的特性,其安全性容易被忽 略。雖有專業人員進行結構檢核,但因憑藉著工人的經驗組立加上施工架數量眾多 管理不易等原因,導致施工架現場的安全性大打折扣和施工架災害頻傳。
圖 1.1 營造業之職災死亡媒介物
表 1.1 103 年及 99~103 年營造業重大職災死亡人數統計表
項目 103 年(人數) 99~103 年(人數) 比例(%)
墜落、滾落 129 451 50.2
物體倒塌、崩塌 14 146 16.2
感電 14 103 11.5
物體飛落 9 51 5.7
被撞 8 44 4.9
被夾、被捲 2 23 2.6
溺水 6 21 2.3
跌倒 5 14 1.6
與有害物質接觸 2 11 1.2
交通事故 4 11 1.2
其他 10 10 1.1
爆炸 0 8 0.9
火災 0 6 0.7
總計 203 899 100
近年來Machine to Machine 技術快速發展,無線感測網路為其中重要的無線傳 輸技術,有線傳輸技術之優點為訊號傳輸和電源供應穩固,但是受限於管線的安裝 維護的時間及成本,若能利用無線傳輸的優點結合傳統監測技術,便可以省去規劃 及安裝管線的時間和成本,只要能夠確認無線傳輸的訊號穩定和電源供應方式,即 可建立一套完整無線感測系統,並且達到快速安裝、重複使用及低成本等優勢。
1.2 研究目的及範圍
因為施工架屬於臨時支撐結構物,有著使用完就拆除的特性,若是使用有線傳 輸方式進行監測施工架的安全性,線路安裝及維護成本高,加上其線路使用的時間 較短,若管線拆除之後,很難再次被使用。以保護在施工架現場的工作人員為出發 點,本研究目的是應用無線感測網路的優點結合多種感測器及警報設備開發出一 套多項目且即時的預警系統,應用於監測施工架的安全性及疏散現場人員上,降低 施工架發生意外的機率和嚴重性,並具有快速安裝、重複使用及低成本等優點,本 研究目的為以下兩點:
1. 應用WSN 無線傳輸技術及應變計、位移計、辨色式模組、雷射模組與磁簧開 關等多種感測器,發展出一套多項目即時無線監測方式,取代現有單項目有線 監測方式。
2. 為了能夠在偵測到施工架結構有倒塌之虞的同時,快速通知現場施工人員,利 用無線傳輸技術及蜂鳴器、震動馬達及警報器等裝置,開發出一套無線警報系 統,通知現場施作人員快速疏散,降低人員的傷亡。
1.3 研究架構與流程
本研究之架構如圖1.3 所示,首先從研究背景及動機找出研究範圍和目的,透 過文獻回顧了解WSN 系統開發的方式、施工架破壞模式及監測項目,接下來進入 到本研究開發WSN 系統過程,包括開發 WSN 系統的軟硬體介紹、感測器選擇與 警報設備的介紹,施工架預警系統開發完成之後,進行與有線設備量測結果進行比 較及修正之後,到建築工地進行實地安裝、測試,對於工地遇到情況進行改良,最 後將會提出本研究之結論與建議,上述內容分為下列五個章節:
第一章 緒論
介紹研究背景與動機、研究目的及範圍與研究架構。
第二章 文獻回顧
本章節分為三個部分,首先蒐集 WSN 相關文獻說明無線感測網路的 硬體及通訊協定,接下來對於施工架的破壞模式、監測方法及警戒值 的設立做文獻回顧,最後以黃泓睿(2015)的研究說明其無線感測節點 及無線傳輸機制。
第三章 無線預警系統開發
本章節首先介紹本研究與黃泓睿研究中的軟硬體與其無線傳輸機制 不同之處,再介紹本研究所使用的 WSN 網路形式及系統開發所使用 的軟硬體,接下來對於各監測設備及警報設備做介紹,最後是說明無 線預警系統架構及如何運作。
第四章 無線預警系統實測
對於本研究所開發出來的預警設備進行測試與校正,可以分成三個階 段,第一階段無線系統與有線設備所量測結果進行比較之後進行校正,
第二階段為一般環境下進行無線傳輸距離的測試,第三階段到建築工 地現場進行實際安裝及測試之過程和成果,最後為各設備的綜合分析。
第五章 結論與建議
綜合本研究開發過程與成果之論述,對於本研究之後續發展提出幾點 建議及後續研究方向,以提供之後研究者做參考。
研究背景與動機
研究目的與範圍
文獻回顧
施工架 無線感測網路
WSN系統開發
WSN警報系統開發 WSN監測系統開發
系統校正與測試
工地實測
結論與建議
修正
第二章 文獻回顧
2.1 無線感測網路
無線感測網路(Wireless Sensor Network)源自於美國加州柏克萊大學的研究計 畫,由美國國防部贊助的,研究人員利用MEMS 微機電技術發展出一種和阿斯匹 靈差不多大小的感測器,稱為智慧塵埃(Smart Dust),原先目的是應用在軍事上,
將智慧塵埃散落在敵人區域,透過無線感測網路回傳已經收集到的資訊,就不用派 遣人力前往危險區域搜集敵情,也可以掌握敵方的動向。
2.1.1 無線感測網路架構概述
無線感測網路是由感測節點所組成,透過感測節點分布,將感測器廣泛分布在 監測範圍內,並透過無線通訊方式進行資料傳輸,其網路系統完整功能為感測、通 訊處理及資料傳輸。在無線感測網路中的感測節點為獨立的個體,其基本構造為電 源單元(Power Unit)、感測單元(Sensing Unit)、處理單元(Processing Unit)及無線傳 輸單元(Transceiver Unit)( Akyildz, et al., 2002) (林宥任,2013),如圖 2.1 所示。
圖 2.1 感測節點架構圖(Akyildz, et al., 2002)
(1) 電源單元(Power Unit):負責供應整個感測節點的運作,包括感測單元、處 理單元及無線傳輸單元,可以使用鋰電池或太陽能電池。
(2) 感測單元(Sensing Unit):內含感測器和類比轉數位器(ADCs),感測器依照 使用者的需求所選擇,例如:溫度計、光敏器、溼度計、位移計等,接下 來將收集到的類比訊號轉成數位訊號,再交由處理單元製成封包形式以 便進行無線傳輸。
(3) 處理單元(Processing Unit):負責處理整個感測節點的運作,例如:收取感測 單元處理後的數據、將數據處理成封包形式,最後將封包傳給傳輸單元等。
(4) 無線傳輸單元(Transceiver Unit):負責連接到網路架構中並且傳輸封包到 設定好的地址(PAD_ID),除此之外,可依照使用者的需求的不同來調整該 單元。
每個感測節點都有各自的任務,基本上可以分成三種, Coordinator、Router、
End Device,以一個完整的無線感測網路來說,至少要有一個 Coordinator 和一個 End Device 才能運作(黃任蓬,2010)(林宥任,2013):
A. Coordinator:為整個感測網路的中樞,負責建立整個網路和維持網路的架 構,對於硬體要求較高,需要較多記憶體來運算,計算何處節點訊號較強 並找出最佳傳輸路徑,大部分會連接到電腦收集及計算數據。
B. End Device:主要收集環境中的數據並且傳輸,需要依照使用者的需求選 擇合適的感測器,此節點會將類比訊號轉成數位訊號,並以封包形式透過 無線網路進行傳輸,最終目的將資料傳給Coordinator。
C. Router:當傳輸距離比較遠的情況,封包無法直接回傳到 Coordinator 時,
可以使用 Router 當作中繼站,增加傳輸距離、而且在中繼點的數量可以 多個,其形成的網路架構稱為多跳式網路架構(multihop),如圖 2.2 所示。
圖 2.2 多跳式網路
由Coordinator、Router 及 End Device 這三種不同功能的節點所構成的多跳式 網路架構,可以分成三種拓樸:星狀拓樸(Star)、樹狀拓樸(Cluster Tree)及點對點網 路拓樸(Mesh),如圖 2.3 所示。
圖 2.3 網路拓樸架構圖
星狀拓樸是由一個Coordinator 和數個 End Device 所組成,直接由 End Device 回傳資料給Coordinator,網路構造最簡單,對於耗電量及記憶體負擔量最小,但是 未使用Router,所覆蓋的範圍也是三者之中最小的。
樹狀拓樸是一個Coordinator、數個 Router 及 End Device 所組成,階層數可自 行訂定,在傳輸的時候,須依照設定好的階層一路往上傳輸,傳到最頂層的 Coordinator,同階層的感測節點是不能互相傳遞。因此耗電量及記憶體負擔量大,
但是網路覆蓋範圍廣、傳輸距離長,適合大範圍的監測上。
點對點網路拓樸的架構和樹狀拓樸相似,但是在同一層的感測節點可以互相 傳遞資料,優點是傳輸路徑最不受到限制,如果其中有 Router 故障或是沒電時,
可以透過同階層其他的 Router 傳輸資料,整體耗電量及記憶體負擔量是最高的,
越是靠近Coordinator 的節點,其對於硬體的負荷就越重。
2.1.2 無線通訊協定比較
無線感測網路使用網路通訊協定 IEEE802.15.4,其中主要特色為低傳輸率 (250kps)、低成本、低耗電、低資料量及網路容量大(65336 個網路節點),所以通常 無線感測網路系統主要應用於傳輸資料量低、並且覆蓋範圍較小的情況使用,若是 在資料量大或是大面積傳輸的情況下,整體網路穩定性大受影響,並且高頻率傳輸 時,會有封包遺失的問題(許家豪,2013)。
除了IEEE802.15.4 通訊協定之外,常見的無線通訊協定還有 Wi-Fi 及 Bluetooth。
Wi-Fi 是現在最普及的無線通訊技術,其傳輸距離為 100m,最高傳輸資料量可達 到54Mbps,但需要高規格、高耗電量的設備來執行,在本研究中,不需要用到這 麼高的傳輸量,為了降低設備的耗電量,不選用此無線通訊協定。
Bluetooth 的通訊協定為 IEEE802.15.1,是一種定位在個人區域網路,目前大 量應用在個人3C 產品上或是家電上,近年來,藍芽技術聯盟推出 Bluetooth 4.0,
將原本傳輸距離10m 更新為最遠可達 100m,也有低耗電模式可以使用,其低耗電 程度和IEEE.802.15.4 不相上下,但是網路容量較小和網路架構選擇較少,為此通 訊協定使用上的限制,三種無線通訊協定比較如表2.1。
表 2.1 無線通訊協定比較表
IEEE 802.11 802.15.1 802.15.4 技術名稱 Wi-Fi Bluetooth Zigbee 頻率 2.4GHz、5GHz 2.4GHz 2.4GHz
868/915MHz
傳輸距離 100m 10~100m 50~300m
傳輸率 11Mbps~54Mbps 1~24Mps 250kbps
網路容量 32 節點 27 節點 65536 節點
網路架構 Star Star Star、Tree、Mesh
耗電量 高 低 低
應用 無線網路 無線音頻 量測控制
選用IEEE 802.15.4 於無線感測技術在土木領域的初期,應用在尺寸較小的結 構上,將該技術和感測器結合,分析回傳資料的準確性,而近年來,開始應用在結 構物的監測,透過感測器收集得到的量測值,例如:位移、速度或加速度等物理量,
回傳到電腦之中,經過結構分析的成果,去檢測結構物的健康程度,例如:橋墩沖 刷深度(林宥任,2013)、斜張橋鋼纜受力程度及橋樑震動模態(Cho, Jo, Jang, Park, Jung, Yun, Spencer, and Seo, 2010)或是監測邊坡的穩定性(羅元彰,2012)等應用,只 要能夠確認WSN 系統和有線設備量測結果相同的話,即可證明 WSN 系統可以取 代傳統有線監測設備的價值(Ou, et al., 2005)。
2.2 施工架
2.2.1 施工架種類及用途
土木工程中所使用的施工架因應施工需求的不同,發展出不同形式的施工架,
可 以 依 照 使 用 範 圍 及 發 展 的 時 間 分 成(1) 單 管 施 工 架 (Tube and Coupler steel Scaffolds),(2)框式施工架(Frame Scaffolds),(3)系統施工架(System Scaffolds)。單 管施工架為最早期工地所使用的組裝式施工架,結構體本身是由許多單支鋼管藉 由接頭組裝而成,但是這種組裝方式繁瑣及接點過多,不易控制結構系統之強度,
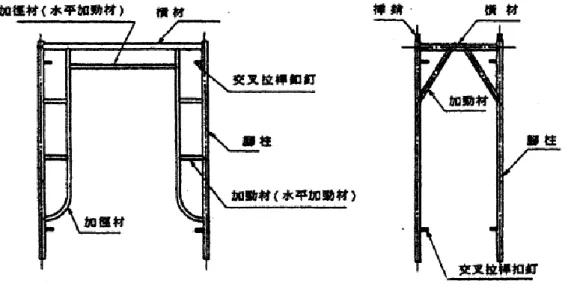
在國內已經很少再使用;框式施工架也是以鋼管為主要構材,因鋼管已經在工廠製 成門型的形式,大幅降低接頭的數量,在工地組立方便,並且結構系統強度較易掌 握,成為施工架之主流,框式施工架種類眾多主要是因為門柱內的加勁材形式和尺 寸不同(圖 2.4);系統施工架已經在日本和歐美普遍使用,利用特別的接頭裝置和 斜撐構件,來輔助框式施工架的不足之處,使得搭建的結構系統沒有強弱軸之分,
可依照工地需求的不同來調整施工架的組立方式,但是由於接頭具有專利及特殊 工法製作,國內無法自行生產,只能依賴進口,單價上也較高,只用於一些特殊工 程。在國內,最廣泛使用還是框式施工架(彭瑞麟,2001)。
圖 2.4 框式施工架型式((A)、(B)和(C)為簡易式,(D)為標準施工架)(吳孟霏,2012)
施工架在營建工程中應用非常廣泛,但施工架應用上大致可以分成「外牆施工 架」與「模板施工架」兩種,在施工階段或是使用維修階段,房屋經常需要搭建臨 時的施工架結構,方便進行外牆模板作業或是外牆整修工程。一般而言,結構所承 受的載重大多是人員和輕型裝備的重量,因此大多採用重量輕且方便組立的簡易 型施工架;若作為支撐模板施工架用途,大多使用於結構物內部淨空的區域,例如:
禮堂、大樓的中庭、體育館及倉庫等(彭瑞麟,2001)。
圖 2.5 模板施工架結構示意圖(彭瑞麟, 2001)
圖 2.6 外牆施工架結構示意圖(彭瑞麟, 2001)
2.2.2 框式施工架強度標準、破壞原因
框式施工架主要承受載重的構件為立柱,也是最容易發生破壞的構件,加上立 柱之高度和管徑相比之下大上許多,故細長比大,結構行為相似於細長柱(陳緯宣,
2011),並且在中國國家標準 CNS4750 中對單管式施工架與框式施工架有詳細的規 範,包括外觀、尺寸、材料、強度及檢測試驗等,圖2.8 與表 2.2 為框式施工架之 各構件之名稱及立柱強度相關規定。
圖 2.7 立柱受軸向壓力示意圖(陳緯宣, 2011)
圖 2.8 CNS4750 框式施工架構件之名稱
表 2.2 CNS4750 對立柱強度相關規定
項目 規定標準
區分 平均值 最小值
抗壓強度 600x1700 7000 6500 762x1700 7000 6500 914x1900 7500 7000 1219x1900 7500 7000 914x1700 8000 7500 1219x1700 8000 7500
垂直撓度 10mm 以下/1000kgf
交叉拉桿扣釘之最大拉伸載重 650kgf 以上 600kgf 以上
建立施工架結構系統需要配合建築物的高度,隨著建築物的高度增加,搭設難 度也越高,但是施工架屬於假設工程,國人容易忽略其安全性及穩定性,雖有相關 人員進行結構檢核,但是經常僅憑藉工人的經驗進行組立。導致施工架倒塌有許多 種原因,例如:施工架構件老舊及變形、載重分布不平均、風阻過大造成側向力過 大、施工架不當組立及使用等原因,其中拆除交叉拉桿、用鋼筋替代繫牆桿、未使 用可調式腳柱、施工架新舊混用等原因造成施工架系統承壓強度下降(張智奇,2006、
彭瑞麟,2000),造成施工架意外時常發生,並且施工架系統破壞是瞬間發生的,
現地人員,無法在施工架意外發生的瞬時,及時逃離現場(紀人超等人,1996)。
2.2.3 施工架監測方法及警戒值設定
就整體施工架系統破壞模式而言,可以區分成系統破壞模式、施工架挫屈破壞 模式及材料承載能力不足等三種模式,施工架監測系統必須要同時監測這三種模 式,才能達到防止施工架支撐系統破壞之目的。將這三種破壞模式轉換成較簡單監 測項目分別為軸向荷重及側向位移,前人研究中提出來合適的監測方式和警戒值 之計算方式(林朝琴,2000)。
(1) 容許軸向荷重及建議監測位置
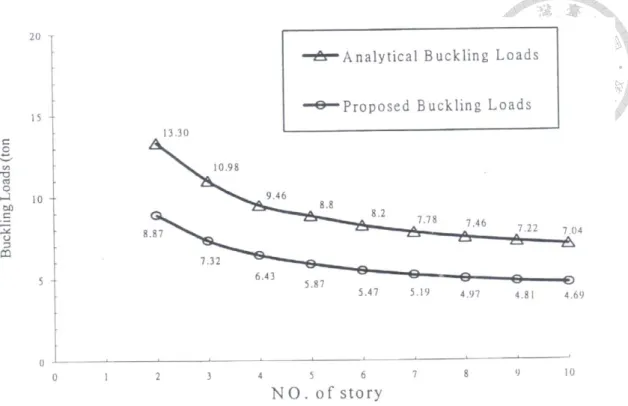
將施工架系統看成是若干個單元體(圖 2.9)根據文獻提出的基本單元 體之荷重曲線(圖 2.10) (高鈺鈞,1998),依照監測施工架系統的層數對應 極限承載力(𝑃𝑢)
單元體,施工架單根鋼管的容許載重值為𝑃𝑎𝑙𝑙,其施工架系統 承壓強度之折減係數∅𝑐 = 0.75。
𝑃𝑎𝑙𝑙 = ∅𝑐× (𝑃𝑢)單元體÷ 4 式2.1 建議監測位置為(a)所有第二根腳柱(b)第二根腳柱中之四個角落位置(c)施 工架支撐系統中有可能造成集中荷重位置。
圖 2.9 基本單元體(高鈺均, 1998、林朝琴, 2000)
圖 2.10 基本單元荷重曲線(高鈺均, 1998、林朝琴, 2000)
(2) 容許側向位移及建議監測位置
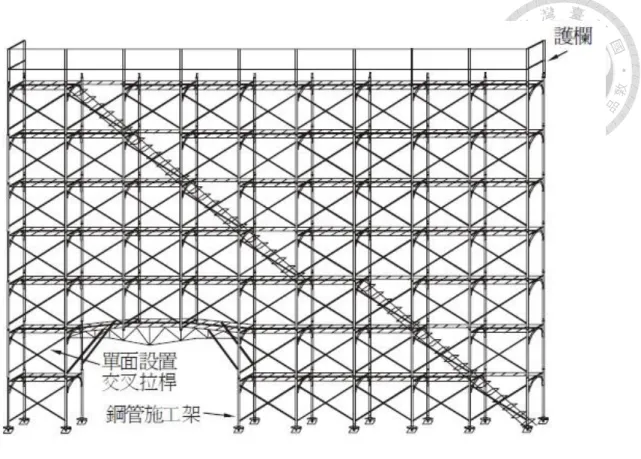
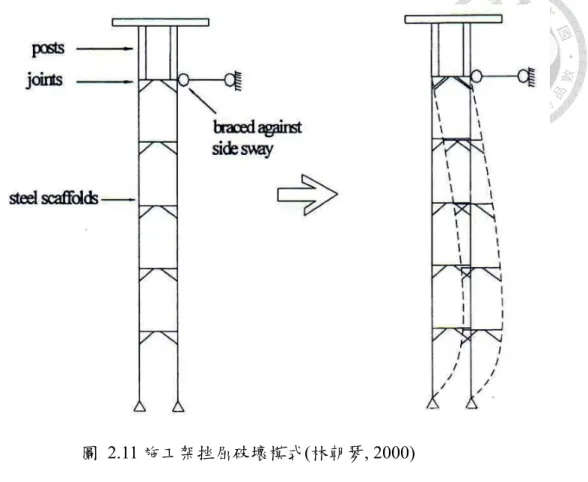
防止施工架挫屈破壞方面(圖 2.11),容許側向位移為 10mm,其建議監 測位置為施工架系統中第一層施工架之頂端。在施工架系統穩定方面(圖 2.12),容許側向位移應當趨近 0mm,但實際上監測施工架系統穩定時,應 需考慮工人走動和風力所造成施工架的震動,來設立此警戒值,降低假警 報的發生,其建議監測位置為施工架和木支撐交接處。
圖 2.11 施工架挫屈破壞模式(林朝琴, 2000)
圖 2.12 系統破壞模式(林朝琴, 2000)
2.3 無線監測系統應用於施工架災害預防之研究
黃泓睿在2015 年的研究中已經對無線感測網路應用在施工架監測系統,已經 有著初步成果,應用科技部「無線感測網路前瞻技術研究」開發之研究成果 supernode 和其搭配電路板,做為無線感測節點(圖 2.13),再搭配應變計及應變訊 號放大器、位移計及辨色式鏡頭等模組,建立一套無線施工架多項目數據傳輸機制,
最後利用 LabVIEW 開發出監測接收介面(圖 2.14),將數據回傳到個人電腦中的 LabVIEW 拆解回傳的封包、讀取數據及判斷是否超過警戒值。因本研究不僅要從 End Device 傳輸訊號到 Coordinator,亦需要從 Coordinator 傳遞訊號到 End Device 並啟動警報設備,和原本單方向的無線傳輸機制不同,故本研究採用由Arduino 團 隊開發的介面控制板及 Digi 公司開發的無線傳輸模組做無線感測節點,再結合感 測器和警報器,建立一套完整的無線預警系統,應用於防治施工架災害上。
圖 2.13 supernode 及搭配使用介面電路板
2.4 小結
在文獻回顧中,首先介紹無線感測網路的基本架構,在本研究中選用了 IEEE.802.15.4,其優點在於低傳輸率、低成本、低耗電量及網路容量大,加上在網 路架構上擁有較多的選擇,可以依照監測範圍和現地情況不同,進行調整並選出最 合適的拓樸模式,只需驗證WSN 系統和有線設備的量測結果相同,即可證明 WSN 系統可以取代傳統有線的監測設備。
建立施工架結構系統需要配合建築物的高度,隨著建築物的高度增加,搭設難 度也越高,但是施工架屬於假設工程,國人不重視其安全性及穩定性,雖然有專業 人員進行結構檢核,但是經常憑藉工人的經驗進行組立。施工架系統破壞模式分成 系統破壞模式、施工架挫屈破壞模式及材料承載能力不足等三種模式,再將這三種 破壞模式轉換成較簡單監測項目分別為軸向荷重及側向位移。施工架系統主要是 由立柱為主要承壓構件,但是施工架系統整體承壓強度不只和其立柱的承壓強度 相關,亦和搭設的樓層及組立方式等等因素有關,並且施工架系統破壞時,是瞬間 破壞,所以警戒值設定上需要較為保守,所以本研究採用高鈺均提出的基本單元荷 重曲線及林朝琴提出的警戒值計算方式和監測位置,而不採用CNS4750 的承壓強 度。
在黃泓睿 2015 年的論文無線監測系統應用於施工架災害預防之研究,應用 supernode 和其搭配的介面電路板、三種感測器及 LabVIEW 接收軟體,成功建立 一套施工架無線監測機制,但因本研究不僅要從End Device 傳輸訊號到 Coordinator,
亦需要從Coordinator 傳遞訊號到 End Device 並啟動警報設備,和由 supernode 軟 硬體所建立的單方向無線傳輸機制不同。故本研究採用由Arduino 團隊開發的介面 控制板及Digi 公司開發的無線傳輸模組做無線感測節點,再結合感測器和警報器,
建立一套完整的無線預警系統。
第三章 無線預警系統開發
無線感測網路及施工架監測項目與容許警戒值在文獻回顧已經做了初步的介 紹,本研究所開發的無線施工架預警系統將無線感測節點、感測器及警報設備三者 功能互相結合,已經達到感測、處理、通訊、數據判讀及發出警報功能。以下分成 無線感測節點開發、感測器與感測節點結合、警報設備和感測節點結合來進行探討。
3.1 無線感測節點開發
本研究無線感測節點由電路板及無線傳輸模組所組成,其中在電路板採用 Arduino 團隊所開發的介面控制板,另外無線傳輸模組的部分採用 Digi 公司所開發 的傳輸模組,將無線感測節點開發分成這兩部分的軟體、韌體及硬體進行探討。
科技部「無線感測網路前瞻技術研究」開發之研究成果supernode 和其搭配電 路板,由兩者所組成的無線感測節點,藉由 IAR for MSP430 軟體將韌體燒錄在 supernode 之後,使得感測節點有建立網路、控制網路及收集數據等能力。本研究 的無線感測節點與supernode 和其搭配電路板所組成的無線感測節點,在硬體最大 的不同之處,在於Arduino 介面控制板中有微控制處理器,使得感測節點擁有邏輯 處理能力,透過微控制處理器讀取收集的數據,直接在感測節點判讀監測數據是否 超過警戒值,再決定是否啟動傳輸模組進行傳輸和開啟警報設備。應用此項不同之 處,使得無線傳輸機制也大不相同,不需要再透過電腦中的接收程式進行接收、拆 解封包、讀取數據,且由於選擇的硬體已經有所不同,所以在程式上的撰寫和軟體 的選擇上都是完全不一樣的,加上Arduino 提供大量的軟硬體資源,擁有高度開發 的空間、方便操作等優點,故本研究決定使用此介面控制版和XBee 傳輸模組。
3.1.1 介面控制板
提供完整資料庫、電路設計圖、電路腳位圖和提供大量的配套軟硬體,擁有著易於 開發和方便操作等優點。Arduino 系列最常被使用的型號 Arduino UNO(圖 3.1),其 硬 體 規 格 如 表 3.1 所 示 。 Arduino UNO 介 面 控 制 板 採 用 ATMEGA328P 和 ATMEGA16U2 微控制器為主結構,其中 ATMEGA328P 為 Arduino UNO 控制核 心,另外ATMEGA16U2 主要負責程式燒錄到 ATMEGA328P 的功能。而在感測節 點上,Arduino UNO 有三大功能,分別為電源處理、訊號處理及邏輯處理等功能。
電源處理
電源的處理需要將電源單元所供應的電能分配到介面控制版中的各個元件,
才 能 使 得 節 點 完 整 運 作 , 其 中 包 含 感 測 器 、 傳 輸 天 線 、 介 面 開 發 版 中 的 ATMEGA328P 及類比轉數位訊號器。以 Arduino UNO 的控制核心 ATMEGA328P 為例,需要將輸入的電壓降壓和穩定在5V,才能使得 Arduino UNO 介面電路板中 的28 個接腳能夠正常運作,由於 Arduino UNO 介面控制版中內建直流穩壓器,供 給整個介面控制版使用,所以介面控制板中的電子元件均可正常運作,但是供應電 壓給感測器時,其穩定電壓的效果相對較差,會影響感測器回傳類比訊號的準確性,
所以為了求得精確數據,使用應變計及應變訊號放大器和拉線式位移計等感測器 時,額外使用穩壓器。
訊號處理
為了將感測器回傳的類比訊號轉成數位訊號,將感測器訊號輸出端連接 Arduino UNO 的類比訊號腳位上(如圖 3.2),透過這些腳位將類比訊號傳到 ATMEGA328P 的類比轉數位訊號器中,內建 10 位元的解析度,即有 1024 種不同 的數值,參考電壓為 5V,參考電壓可以依照使用者需求進行修改,在本研究中,
參考電壓為5V,將 0V 到 5V 分成 1024 等分的數位訊號。
邏輯處理
為了感測節點有偵測施工架系統有無倒塌之虞的能力,將各感測節點的警戒 值建立在 Arduino UNO 的 ATMEGA328P 微控制處理器上,將已轉換的數位訊號
輸入到ATMEGA328P 微控制器中,透過程式碼內的計算公式,將數位訊號換算成 監測到的數值,對於監測到的數值和設定的警戒值進行比較,如果量測的物理量小 於警戒值的話,則不啟動傳輸天線並繼續監測施工架,若量測的數據大於警戒值的 話,則啟動天線並傳送訊息到警報系統,而在警報系統中的感測節點,立即啟動警 報設備,透過聲音或是震動通知現場施工人員施工架結構有倒塌之虞,請盡速遠離 施工架結構物。
表 3.1 Arduino 硬體規格
微控制器 ATMEGA328P SRAM 1KB(ATMEGA328P) EEPROM 2KB(ATMEGA328P) FLASH(快閃記憶體) 32KB(ATMEGA328P)
0.5KB 為開機程式
工作電壓 5V
建議輸入電壓 7~12V 數位I/O 接腳 14 類比訊號輸入接腳 6
圖 3.1 Arduino UNO 介面控制板
圖 3.2 Arduino UNO 電路腳位圖(Arduino UNO datasheet)
(資料來源:https://www.arduino.cc/en/uploads/Main/Arduino_Uno_Rev3-schematic.pdf)
軟體
為了讓Arduino UNO 執行上述三種功能,需要開發環境、編譯器、連結器、
開發工具鏈、燒錄程式、板子與電腦連接所需要的驅動程式等軟硬體,Arduino 團 隊將前述所需要的程式整合到所開發的Arduino IDE software(圖 3.3)之中,它所用 的程式語言語法類似於 C++/JAVA 高階程式語言,具備文字編輯介面、常用工具 欄、圖形化控制介面及錯誤編輯器,透過這個軟體將編寫好的程式碼上傳到 ATMEGA328P 中的 FLASH(快閃記憶體),而運作程式碼所需要的資料暫存在 SRAM 之中,Arduino UNO 介面開發板便會執行上述三種功能。
圖 3.3 Arduino IDE software
3.1.2 傳輸模組
本研究採用的傳輸模組為 Digi 公司所開發 XBee 系列的相關產品,通訊協定 為 Zigbee(IEEE.802.15.4),以星狀拓樸來建立無線施工架預警系統,XBee 傳輸模 組分成Series 1 及 Series 2 兩個版本,主要差別是 Series 1 只能一對一傳輸資料,
Series 2 可以多對一或是一對多進行資料的傳輸,為了能夠建立多對一無線感測網 路架構,採用XBee Series 2 這組傳輸模組,並應用了兩組功率和傳輸距離不同的 天線,分別是XBee 2mw(120 公尺)及 XBee 63mw(1600 公尺)(如圖 3.4),增加網路 覆蓋範圍及減少工地內傳輸死角。
圖 3.4 XBee 傳輸模組
圖 3.5 XBee 底座
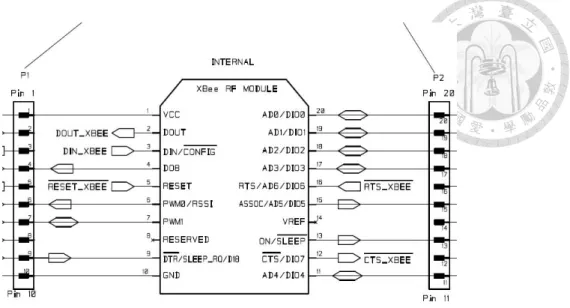
圖 3.6 XBee 腳位圖(XBee datasheet)
(資料來源: http://ftp1.digi.com/support/documentation/90000976.pdf) 為了建立一套自動化預警系統,本研究將韌體燒錄XBee 傳輸模組上,讓末端 節點具備傳輸模組初始化、建構網路架構、控制網路及傳輸資料等能力,可透過終 端機軟體下 AT command 指令或 Digi 所開發的軟體 X-CTU(Configuration & Test utility software)(如圖 3.7)來設定及更新 XBee 傳輸模組上的韌體,依照韌體上的不 同,可使末端節點擁有Coordinator、Router 或 End Device 等不同的功能。
使用XBee 底座(圖 3.5)將 XBee 傳輸模組的 4 個腳位(5V、GND、Tx 及 Rx)延 伸出來(圖 3.6),方便和 Arduino UNO 連接,結合之後就成為一組 End Devcie,如 圖3.8 所示,只要外接電源供應器、感測器或是警報設備,即可運作。
圖 3.8 End Device
3.2 無線監測系統開發
從林朝琴在2000 年的研究得知施工架系統主要有三種破壞模式,再將這三種 破壞模式轉換成較為簡單的監測項目軸向荷重及側向位移,在監測軸向荷重方面,
應用應變規量測施工架的應變,容許載重藉由公式計算成容許應變值,即為警戒值;
在側向位移方面,採用拉線式位移計、辨色式鏡頭及雷射模組來監測施工架的側向 位移。此外由於施工架和施工架之間的接合處是個易發生破壞和產生相對位移的 地方,本研究使用磁簧開關及雷射模組對於施工架之間的接合處進行監測,在選用 好感測器之後,再和前述已開發好的End Device 做結合,搭配上無線感測網路,
即可成為一套完整無線施工架監測系統。
3.2.1 應變規與應變訊號放大器
本研究採用日本TML 公司所開發的應變規,型號為 FLA-3-11-3L 之應變規(圖 3.9),應變規尺寸為 L=3mm、W=1.7mm、Backing L=8.8mm 及 Backing W=3.5mm,
電阻為120 歐姆,應用 Wheatstone 電橋 1/4 橋接的方式(圖 3.10)連接起來,將量測 到施工架的應變轉換成可量測的電壓回傳,再選用Mantracourt 公司所開發的應變 訊號放大器ICA2(圖 3.11),由於可以配合 Arduino UNO 所供應的電壓 5V,無須再 調整電壓,回傳類比訊號範圍為0.1~5.1 伏特,最後和無線感測節點結合之後,即 可成為一組應變監測設備(圖 3.12)。
圖 3.9 FLA-3-11-3L 應變規
圖 3.10 Wheatstone 電橋 1/4 橋接
圖 3.11 應變訊號放大器
圖 3.12 應變訊號放大器與感測節點結合
3.2.2 拉線式位移計
採用位移計作為監測側向位移之感測器,此種感測器需固定在一基準結構物 上,例如:建築物的牆面,以便量測施工架和建築物之間的側向位移,需要考慮到 施工架現場空間、感測器的體積和重量、耗電量、價格和量測的精度等條件,所以 綜合上述條件,本研究採用美國Celesco 公司所開發的拉線式位移計,型號為 SP2- 12(圖 3.13),其優點體積小、重量輕及量測精準度也符合本研究之需求,工作電壓 為5 伏特,不需要額外調整電壓,量測範圍為 0 到 317mm,其伸長量和回傳的電
壓成正比關係,當伸長量改變時,回傳的電壓也會有所變化,再和無線感測節點結 合,成為一組無線位移監測設備(圖 3.14)。
圖 3.13 拉線式位移計
圖 3.14 拉線式位移計與無線感測節點結合
3.2.3 影像辨識模組
由於拉線式位移計需要固定在基準結構物上,才能量測施工架的側向位移,但 是在工地現場要找到適合的安裝位置可能較困難,本研究團隊另外選用了 GHI Electronic 公司所開發的影像辨識模組,型號為 FEZ Spider II Tinker Kit,由攝影鏡 頭、顯示螢幕、LED 燈模組、影像辨識電路板和電源供應器所組成(圖 3.15),但需 要另一個電源,無法使用Arduino UNO 介面控制板供應電源,本研究是使用行動 電源,本研究團隊藉由C#編寫主電路板中韌體,透過攝影鏡頭的回傳畫面,藉由 主電路板來判定鏡頭所對準地方是否為綠色,為了搭配此程式的特性,另外製作了 一個中心點為綠色的標靶,將影像辨識模組固定在施工架上對準地面上的標靶,來 增加設備可以安裝的位置。監測概念如果鏡頭對準標靶中心點的綠色部分,視為正 常狀態,此時,LED 燈模組會亮綠燈,施工架未產生過大的側向位移;若鏡頭未 對準標靶中心的綠色部分,視為危險部分,此時LED 燈模組不會亮燈,施工架產 生過大的側向位移(如圖 3.16 所示)。將 LED 燈模組和無線感測節點連接(圖 3.17),
就成為一套辨色式監測設備。
圖 3.15 影像辨識模組硬體組成
圖 3.16 監測概念示意圖
圖 3.17 辨色式模組與無線感測節點結合
3.2.4 雷射發射器及雷射接收器
本研究再應用前述的監測概念,採用能量較為集中的雷射發射器和雷射接收 器(圖 3.18)作為感測器,為了方便施工現場安裝,雷射發射器使用另一個電池盒供 電(圖 3.19),雷射接收器和無線感測節點做結合(圖 3.20),由 Arduino UNO 介面控 制板供應電源,當雷射光對準到雷射接收器的時候,雷射接收器會回傳一個接近5 伏特的類比訊號給Arduino UNO,而雷射光未對準雷射接收器的時候,雷射接收器 會回傳一個接近 0 伏特的類比訊號,利用高電壓和低電壓作為無線感測節點判定 施工架有無過大的側向位移。
圖 3.18 雷射模組
圖 3.19 雷射發射器
圖 3.20 雷射接收器與無線感測節點結合
3.2.5 雷射模組與磁簧模組
為了監測施工架單元之間的相對位移,先將施工架單元相對位移定義成X 軸、
Y 軸及 Z 軸等三軸位移(如圖 3.21)。雷射發射器和雷射接收器負責監測施工架的水 平位移(X 軸和 Y 軸),將雷射發射器上層施工架的底端,接收器固定在下層施工架 底端,因為監測相鄰兩層的施工架之水平位移,不採用額外供應電源的方式給雷射 發射器,由無線感測節點供應電源給雷射發射器,其監測概念和影像辨識模組的監 測概念相同;將磁簧模組中的磁鐵固定在上層施工架的底端,磁簧開關固定在下層 施工架的頂端,監測施工架之間的Z 軸位移,當上層施工架 Z 軸位移過大的時候,
磁簧開關會打開,如同斷路,若施工架 Z 軸位移在一定範圍內的時候,磁簧開關 會閉合,電路會形成迴路。在裝有磁簧開關的迴路上,裝設LED 燈,可藉 LED 燈 是否亮燈,來檢查電路是否為斷路,最後將雷射接收器和磁簧模組和無線感測網路 結合(圖 3.22),應用上述概念監測施工架三軸的相對位移。
圖 3.21 施工架三軸圖
圖 3.22 雷射模組、磁簧模組與感測節點結合
3.3 無線警報系統開發
為了能夠確實地通知到施工架現場的施工人員及管理人員,本研究開發了三 組無線警報設備,分別為警報通知設備、隨身警報通知設備及 E-mail 通知設備,
在施工架有倒塌之虞時,警報通知設備負責通知區域內的施作人員和管理人員;隨 身警報設備負責通知配戴的施作人員;E-mail 通知設備可以透過網際網路通知管 理人員,即使管理人員不在工地現場,依然可以接收到工地現場的情況,最後將無 線監測系統和無線警報系統整合成一套完整無線施工架預警系統,能夠在監測到 施工架系統有倒塌之虞時,系統自動通知到現場施作人員和管理人員,以期能夠降 低施工架意外發生的機率和嚴重性。
3.3.1 警報通知設備
為了在偵測到施工架有倒塌之虞的時候,能夠通知到範圍內的施工架現場人 員,本研究選用能夠發出 100 分貝的警報器,透過警報聲通知現場施作人員盡速 遠離施工架,本研究採用星狀拓樸做為無線施工架預警系統的網路架構,將此警報 通知設備的XBee Pro 設定為 Coordinator,在施工架監測系統回傳施工架有倒塌之 虞的訊息,當Coordinator 接受到此訊息時,啟動警報器,再傳遞訊息給隨身警報 模組及E-mail 模組,此模組的傳輸模組採用功率較大的 XBee Pro(圖 3.23),減少 在工地現場傳輸的死角和增加傳送距離,最後將警報器和無線感測節點結合(圖 3.24),即可成為一組警報通知設備。
圖 3.23 XBee Pro
圖 3.24 警報通知設備
3.3.2 隨身警報設備
警報通知設備是固定在工地現場的工作區域,也只能通知到區域內的施作人 員,當施工人員遠離警報設備通知到的範圍內,就無法接受到施工架有危險發生的 訊息,所以本研究開發以工人攜帶為主且能通知危險訊息的隨身攜帶設備,應用蜂 鳴器模組及振動馬達模組,透過聲響和振動作為遠離施工架的訊息,通知施作人員 離開。一開始採用Arduino UNO 進行開發(圖 3.25),但是由於開發出來的 Arduino UNO 隨身警報通知設備,體積太大不方便工作人員攜帶和不便於工作,改使用 Arduino Micro (圖 3.26)和 XBee 組成,縮小設備的體積,開發完成的 Arduino micro 隨身警報通知設備(圖 3.27),使得工作人員攜帶更加方便。
圖 3.25 Arduino UNO 隨身警報設備
圖 3.26 Arduino Micro
3.2.3 EMAIL 通知設備
本研究希望警報系統不僅能夠通知施工現場的施作人員及管理人員,如果管 理人員剛好不在工地時,也能第一時間內接收施工架有危險發生的訊息,快速做出 應變措施,減少因通知時間延遲所造成的損失。由 zigbee 所建立的網路範圍和傳 輸距離較小,適合在工地現場使用,但是由於管理人員在其他地方離工地距離不可 預期,所以使用無線網際網路做為傳輸的路徑。此無線感測節點不僅需要XBee 傳 輸模組,和監測系統作為聯繫,亦需要擁有Wifi 或是乙太網路的連線能力,所以 本研究採用了Arduino 團隊所開發的 Arduino Yun 介面控制板(圖 3.28),不僅擁有 Wifi 和乙太網路的連線能力,還有兩個微控制處理器 ATmega32U4 和 AR9331。和 前述兩種介面控制板最大的不同之處,AR9331 運行基於 Linux 和 OpenWRT 的操 作系統 Linino,本研究將 Arduino Yun 和 XBee 傳輸模組做結合(圖 3.29),當 Coordinator 發送警報訊號時,XBee 傳輸模組接收此訊號,再透過 ATmega32U4 讀 取此訊號,再透過Bridge 程式聯繫 AR9331 開始編寫 e-mail 內容(圖 3.30)和將 e- mail 傳輸到指定的信箱(圖 3.31),只要將此電子信箱設定在智慧型手機上,即使管 理人員不在工地現場亦可得知工地施工架有異常情況發生,做出應變措施。
圖 3.28 Arduino Yun
圖 3.29 XBee 與 Arduino Yun 結合
圖 3.30 Arduino Yun 運作情況
3.4 系統運作流程圖
安裝SENSOR
End Device 處理數據
啟動警報器 回傳
Coordinator
End Device 接收訊息
通知管理人員 緊急處理
End Device 處理數據
End Device 處理數據
判斷數據是否大於警戒值
End Device 接收訊息 End Device
接收訊息
通知施作人員遠離 通知施作人員遠離 是 否
無線 監測 系統
無線 警報 系統
圖 3.32 系統運作流程圖
3.5 小結
先將無線預警系統分成無線感測節點的開發、無線監測系統和無線警示系統 三個部分,在無線感測節點小節說明了科技部「無線感測網路前瞻技術研究」所開 發的supernode 為主體的無線感測節點和以本研究所建立的無線感測節點在硬體、
韌體、軟體和傳輸機制的不同之處,並說明了為何要使用 Arduino 介面控制板和 XBee 傳輸模組,最後說明了無線感測節點的建立和運作流程。
在無線監測系統的部分,說明三項施工架應監測的項目、一一介紹了使用各種 感測器,並和無線感測節點做出結合,應變監測設備透過應變計及訊號放大器監測 施工架的軸向應變;拉線式位移計、辨識影像模組及雷射模組用來監測施工架的側 向位移,最後介紹雷射磁簧設備負責監測施工架接合處的破壞。
在無線警報系統上,開發了三種不同無線警報設備,分別通知不同地區的人員,
應不同的特性,達到最廣泛的通知範圍。警報設備負責通知特定區域的施作人員和 管理人員,以施工區域的通知為目的;隨身警報設備以配戴的工人為目標,補足警 報設備無法通知到的範圍; E-mail 通知設備以通知因有事外出不在施工現場的管 理人員,即使人不在工地,亦可在第一時間得知工地現場施工架的情況,做出應變 處理。
最後以施工架預警系統運作流程圖為總結,從無線感測節點運作到整個系統 如何運作,希望透過五種監測設備對施工架全面的監測,再加上三種警報設備的通 報,可以把施工架倒塌意外的發生機率和嚴重性降到最低,改善營造業的施工環境。
第四章 無線預警系統實測
4.1 無線預警系統校正實驗
4.1.1 無線預警系統類比轉數位訊號計算
無線感測節點和應變計及訊號放大器、拉線式位移計、影像辨識模組、雷射模 組及磁簧模組各種感測器做結合,感測器有各自計算公式,將量測值轉成類比訊號,
由Arduino UNO 去擷取類比訊號,再把類比訊號的電壓變化轉成數位訊號,內建 的類比轉數位訊號器將電壓0 到 5 伏特轉換成 0 到 1024 之數位訊號值,由 Arduino UNO 上的微控制處理器 ATMEGA328P 去計算數位訊號回推量測值,並且進行警 戒值的判斷。
在應變規及應變訊號放大器的部分,採用惠世通電橋1/4 橋接式電路,將施工 架受到軸向載重所產生的應變轉換成可以量測的電壓值,V0為Arduino UNO 擷取 到的電壓和感測器工作電壓VEX, 應變規應變係數 GF、應變ε和訊號放大器倍率 z 有關,為感測器計算公式如式4.1 所示:
V0 = GF×ε
4 ( 1
1+GF×ε2) × VEX× z 式 4.1
透過上述公式計算得到ε = 4
GF×(VEX×Z−2V0)V0,應變模組中 Arduino UNO 計算公式 如式4.2 所示:
ε = 4
GF∗(VEX×Z−2V0)×數位訊號值
1024 × 5V 式 4.2
在拉線式位移計的部分,數位訊號值0 到 1024 分別代表 0 到 317mm 的位移 值,其計算公式如式4.3 所示:
位移(mm) = 63.4 ×數位訊號值
1024 × 5𝑉 式 4.3
在影像辨識模組部分,由於韌體內容為螢幕中心點對準綠色,則LED 模組亮 燈,所回傳的3 伏特的電壓;雷射模組部分,當雷射發射器對準雷射接收器時,則 回傳 5 伏特之電壓;磁簧模組在磁鐵靠近時,磁簧開關形成通路會回傳 3 伏特的 電壓,上述三種情況皆為施工架系統正常的情況,三組感測器計算公式相同如式 4.4 所示。
電壓(V) =數位訊號值
1024 × 5𝑉 式 4.4
4.1.2 無線監測系統與有線設備校正
在預警系統中最重要的就是設備量測出來的結果是否正確,否則當量測的結 果不正確時,預警系統無法發揮其功能,無法達到本研究之目的。在設備完成之後,
需要和傳統有線監測設備進行比較和校正,當兩者的量測結果相同時,無線設備才 能算是完成,在應變的部分,採用東京感測器研究所(TML)的產品手持式紀錄器 TC-32K,其精度為 1µ,也就是1 × 10−6;在位移方面,一樣以黃銅片為試體,採 用百分表作為對照組,百分表的精度為0.01mm。
在應變監測設備的部分,以長度18 公分,寬度 1.3 公分,厚度 0.1 公分的均 質黃銅片(圖 4.1)做測試,安裝百分表模組上,透過旋轉模組下方的螺絲給 0~5mm 的位移,藉由此方法比較本研究開發的應變監測設備所量測結果與TC-32K 所量測 結果進行比較和校正,有線及無線設備測試情況如圖4.2 及圖 4.3 所示,經過實驗 得知無線設備和 TC-32K 之結果呈現約 1.25 倍的比例差距,故在計算公式上乘上 修正係數,透過係數修正之後無線量測結果與 TC-32K 量測結果相差約為 1%(圖 4.4)。
圖 4.1 黃銅片試體
圖 4.2 有線設備實驗情況
圖 4.3 無線設備實驗情況
圖 4.4 應變監測設備與 TC-32K 量測結果對照圖
在位移監測設備的校正方式,先將拉線式位移計固定在實驗台上,和以黃銅片 為試體的百分表模組之量測結果做出比較,實驗情況如圖4.5 所示,從兩者量測結 果得知位移監測設備與百分表之量測結果平均相差 0.1mm(圖 4.6),兩者量測結果 差距非常小,為Arduino UNO 數位解析度為 1024 所造成的誤差,與文獻回顧之施 工架容許側向位移10mm 相比,此差距在可接受範圍內。
圖 4.5 位移監測設備和百分表實驗情況
0 50 100 150 200 250 300
1 2 3 4 5
量測到的應變
百分表位移(mm)
應變設備校準實驗
TC-32K 應變設備
圖 4.6 位移監測設備和百分表量測結果對照圖
在辨色式設備的部分,由於其韌體內容為判別鏡頭的中心點對準的地方是否 為綠色,也就是顯示螢幕白色十字點位的像素是否為綠色,所以測試其功能是否正 常運作,測試情況如圖4.7 所示,當鏡頭對準綠色標的物時,韌體程式認定為綠色,
連接的LED 會亮燈,此時不會回傳警戒訊號給 Coordinator,當鏡頭未對準綠色標 的物時,LED 會熄滅(圖 4.8),此時啟動傳輸模組傳輸警戒訊號給 Coordinator(圖 4.9)。
圖 4.7 辨色式設備測試情況
0 1 2 3 4 5 6
1 2 3 4 5
量測到位移
位移(mm)
位移設備校準實驗
百分表 位移設備
圖 4.8 辨色式設備對準綠色標的物
圖 4.9 辨色式設備未對準綠色標的物
在雷射監測設備的部分,測試當雷射光距離雷射接受器多近距離的情況,接受 器會視為雷射光已經對準了雷射接受器,雷射模組測試情況如圖 4.10 所示,經過 實驗結果得知雷射光距離雷射接受器約為 2 公分以內,使雷射接受器視為雷射光 對準接收器的情況;在磁簧模組的部分,測試磁鐵的影響範圍,在磁鐵距離磁簧開 關2 公分之內(圖 4.11),會使磁簧開關閉合形成通路,使得電路上的黃色 LED 燈 亮起(圖 4.12)。
圖 4.10 雷射監測設備測試情況
圖 4.11 磁鐵距離磁簧開關測試情況
圖 4.12 當磁簧開關形成通路時黃色 LED 亮燈情況
4.2 無線預警系統傳輸距離實驗
在無線設備校正結束之後,雖然XBee 和 XBee Pro 傳輸模組在產品說明書上 都有其傳輸功率與傳輸距離,但本研究希望透過測試的方式得知實際上最遠傳輸 距離,可供在日後無線施工架預警系統在工地安裝和佈署參考。首先對於雷射磁簧
監測設備進行軟體及硬體上的調整,將擁有兩種感測器的監測設備調整成只有磁 簧模組的監測設備(圖 4.13),以便在測試階段模擬施工架系統發生危險之情況,待 測試結束再改回雷射模組加上磁簧模組的監測設備。
圖 4.13 磁簧開關和無線感節點結合
測試傳輸距離的方式透過磁鐵遠離磁簧開關,使得磁簧開關形成斷路,模擬施 工架系統發生危險,此時無線感測節點偵測到這種情況之後,傳輸警示訊號到警報 設備上,也就是回傳到Coordinator,而警報設備中的警報器會開始運作,由於警報 器會發出巨大聲響,在此警報器的迴路上加裝LED 燈暫時代替警報器,作為是否 收到訊號的標記。測試地點為國立台灣大學的椰林大道上(圖 4.14),將磁簧模組的 無線設備固定在椰林大道上森林系館前的位置上,模擬施工架發生危險情況(圖 4.15 和圖 4.16),無線感測節點傳輸訊號,此時開始移動警報設備,移動到無法接 收到訊號的位置之後,使用粉筆做標記,再透過布捲尺量測兩個模組之間距離(圖 4.17),即為傳輸模組的傳輸距離。
圖 4.14 測試地點
圖 4.15 XBee 傳輸模組測試情況
圖 4.16 XBee Pro 傳輸模組測試情況
圖 4.17 利用布捲尺量測距離情況
在XBee 傳輸模組的部分,經實測情況得知在中間無阻隔物的情況下,原傳輸 距離120 公尺的傳輸模組最遠可以傳到 188 公尺;在 XBee Pro 傳輸模組的部分,
由於椰林大道長度之緣故,無法測得此傳輸模組最遠距離,量測到最遠距離約為 540 公尺。
圖 4.18 警報設備移動之情況
4.3 無線預警系統工地安裝及實測
在無線施工架預警系統完成校正和測試之後,本研究進行現地測試的位置為 在高雄凹子底捷運站旁的建築工地,其詳細工地資料如下表4.1 所示。本研究進場 進行現地測試時間為建物18 樓正在進行混凝土澆置工程,其底下樓層進行安裝管 線及安裝門框等工程,工地現況如圖4.19 和圖 4.20 所示。某建設以工地安全為考 量,所以監測範圍為地上1 樓到 3 樓的西面施工架,共計 7 層施工架,如圖 4.21 所示,為了方便安裝和進行戶外實測,已將本研究所開發的監測設備及警報設備進 行盒裝,盒子選用能夠防水和透明的塑膠蓋的盒子,以降低外在環境之影響和方便 觀察設備運作情況,其電源採用行動電源,將工地實測分成三個部分進行介紹,分 別為工地環境下傳輸距離測試、無線預警系統之安裝情況及無線預警系統之測試。
表 4.1 工地基本資料
建案名稱 某建設凹子底新建工程 地址 高雄市左營區博愛二路12 號 建築形式 鋼筋混凝土造
樓層 地下4 層,地上 28 層 基地面積 1951.00 M2
建築面積 674.58 M2 房屋座向 座東面西
GPS 座標 緯度: 22.656701 經度: 120.303399
圖 4.19 工地現況
圖 4.20 建物內部情況