國
立
交
通
大
學
電信工程研究所
碩
士
論
文
動態過濾器應用在偵測病毒特徵碼防毒軟體
Dynamic Pre-filter Designs for Signature Based Anti-Virus/Worm
Applications
研 究 生:王廣煜
指導教授:李程輝 教授
動態過濾器應用在偵測病毒特徵碼防毒軟體
Dynamic Pre-filter Designs for Signature Based
Anti-Virus/Worm Applications
研 究 生:王廣煜 Student:Kuang-Yu Wang
指導教授:李程輝 Advisor:Tsern-Huei Lee
國 立 交 通 大 學
電信工程研究所
碩 士 論 文
A ThesisSubmitted to College of Electrical and Computer Engineering National Chiao Tung University
in partial Fulfillment of the Requirements for the Degree of
Master in
Computer and Information Science,
June 2013
Hsinchu, Taiwan, Republic of China
i
動態過濾器應用在偵測病毒特徵碼防毒軟體
學生:王廣煜
指導教授:李程輝
國立交通大學電信工程研究所
摘
要
字串比對在病毒偵測的應用上是一門很重要的技術,因為字串比對的精確度比異常 行為偵測來的高。目前有許多有名的字串比對演算法已經被提出,其中 Aho-Corasick (AC) 是一種可以同時比對多隻病毒的演算法。然而,AC 演算法偵測的對象是以普通字 串表示的病毒,無法偵測以正規表示式表示的病毒。 在我們提出的字串比對系統中,主要是偵測正規表示式的病毒特徵碼,包含動態過 濾器與驗證模組兩部分。動態過濾器的主要目的是快速移動到檔案可疑的病毒位置,它 透過將相對應的字串資訊逐步加入系統中,可以避免不必要的字串資訊加入,增強效 能。驗證模組是驗證動態過濾器找出來的可疑位置是否真的是病毒特徵碼的某一段,我 們事先將病毒特偵碼分段建造狀態機,驗證模組只需要針對可能的狀態機進行追蹤,減 少時間上的浪費。 關鍵字:Aho-Corasick 演算法、字串比對、正規表示式、動態過濾器
ii
Dynamic Pre-filter Designs for Signature Based
Anti-Virus/Worm Applications
Student:
Kuang-Yu WangAdvisors:Prof.
Tsern-Huei LeeInstitute of Communication Engineering
National Chiao Tung University
ABSTRACT
Pattern matching is an important technology in anti-virus/worm applications and is more accuracy than behavior anomaly. Many famous pattern matching algorithms have been presented in the past, and Aho-Corasick (AC) is one of the famous algorithms that can match multiple patterns simultaneously. However, the AC algorithm was developed for plain strings while virus/worm signatures could be specified by simple regular expressions.
Our proposed signature matching system which consists of a dynamic pre-filter and a verification module is designed for simple regular expressions detection. The main purpose of dynamic pre-filter is to quickly find the starting position of suspicious substrings which may result in match of some signatures. It can avoid unnecessary information by adding a few fragments of signature to enhance the performance. The verification module is used to verify whether there is any virus at suspicious position found by dynamic pre-filter. We built the state machine in advanced according to the fragments of signatures. The verification module only traces the possible state machine to save the time.
Keywords: Aho-Corasick algorithm, pattern matching, Regular expression, Dynamic
iii
誌
謝
感謝我的指導教授-李程輝教授。從專題到研究,他引導我學習新的
知識、彙整資訊多方思考問題的所在,在這兩年的研究生活中,我從老師
身上學習到了研究應該有的態度與思考,獲益良多。
感謝我的父母對我的栽培,他們對我的支持與鼓勵,讓我能不顧後顧
之憂,全心學習知識。
感謝交通大學電信工程學系 NTL 實驗室的各位伙伴,學長姐們的熱心
指導;與同儕之間的互相討論;學弟妹們的意見交流,讓我的研究能順利
完成,謝謝。
感謝一路以來幫助我的所有好友,在我需要幫助時,適時地拉我一把,
成為我能努力不懈、勇往直前的動力。
2013/07 王廣煜
iv
目
錄
中文摘要
i
英文摘要
ii
誌謝
iii
目錄
iv
圖目錄
vi
表目錄
vii
Chapter1
Problem definitionIntroduction
1
Chapter2
Problem definition and related work
4
2.1
Problem definition
4
2.2
Pre-filter
5
2.2.1
HASH function
5
2.2.2
Pre-filter operation
6
2.3
Stateful Pre-filter
8
2.4
Static pre-filter with verification
9
2.4.1
Static pre-filter
10
2.4.2
Verification
11
Chapter3
Proposed Algorithm
15
3.1
Hash tables of dynamic pre-filter
15
3.2
Hash functions
18
3.3
Operation of dynamic pre-filter
19
Chapter4
Simulation
21
4.1
Performance comparisons between static pre-filter and
dynamic pre-filter
21
4.2
Time comparison
22
4.2.1
Pre-filter module
23
v
4.3
Memory requirement
26
Chapter5
Analysis
28
5.1
Average window advancement
28
5.2
Derivation of Pj,i
30
5.3
Numerical result
30
Chapter6
Conclusion
33
vi
圖 目 錄
Fig. 1 Hash table
6
Fig. 2 Pre-filter operation
7
Fig. 3 The stateful pre-filter architecture for W = 6 and k = 3
9
Fig. 4 Example of Goto graphs for RE1 abc, RE2 ab cd e* * , RE3 bc ad e* * ,
4 *
RE pqr vs, and RE5 pq{2, 4}qrqs{3,5} *tu vw x* {2, 6}y
12
Fig. 5 Comparison of hash table with static and dynamic methods for example RE1 =
abcdefghi*12345 and RE2 = uvwxyz*9876543210
16
Fig. 6 Procedure of updating hash table using dynamic pre-filter.
17
Fig. 7 The diagram of two hash functions
18
Fig. 8 Two hash tables for different size of window
19
Fig. 9 Performances comparison of static and dynamic methods with a virus inserted
in the file.
22
Fig. 10 Performances comparison of static and dynamic methods in pre-filter module
with a virus inserted in the file.
23
Fig. 11 Performances comparison of static and dynamic methods in verification
module with a virus inserted in the file.
25
Fig. 12 Performance comparison of static and dynamic methods with less memory
requirement in dynamic method.
27
Fig. 13 Average window advancement with various number of fragments in hash table
with N=220.
31
Fig. 14 Fig. 14 Average window advancement with various number of fragments in
vii
表 目 錄
Table 1(a) The failure function for the example used in Fig. 4.
13
Table 1(b) The output function for the example used in Fig. 4.13
Table 2 Comparisons of numbers of shift in pre-filter module between static anddynamic methods.
24
Table 3 Comparisons of verification count between static and dynamic methods.
25
Table 4 List of memory usage in pre-filter and verification module.27
1
Chapter 1.
Problem definition
Introduction
Two major techniques are used in virus detection. One is behavior anomaly and another is pattern matching. Behavior anomaly can detect virus when abnormal behavior occurs. For instance, an infected computer would have higher new connections rate than a normal computer would have. This abnormal behavior can be detected by observing the number of new connections [1]. However, behavior anomaly may create false positive if normal behavior is not well-defined in advanced. Pattern matching is another technique that is more accuracy than behavior anomaly. There are some significant patterns derived from malicious codes in packet. The idea of pattern matching is to find out whether there is a significant pattern hidden in the files.
Knuth-Morris-Pratt(KMP) [2], Boyer-Moore(BM) [3], Aho-Corasick(AC) [4] and Wu-Member(WM) [5] are famous pattern matching techniques. Bloom filter [6]-[12] is also a technique for pattern matching that is famous for its space-efficient probabilistic data structure. KMP and BM are efficiency only in single pattern detection. The AC and WM are designed for multiple patterns detection. However, AC algorithm may have the disadvantage about the huge memory requirement of constructing a two dimensional state transition table. Thus, some methods such as band-row format, AC-bnfa and bitmap data structure proposed for memory reduction.
2
The idea of pre-filter comes from shift table of WM. The purpose of pre-filter is to exclude the impossible position in the file. In other words, it can find the suspicious position in the file fast and verify suspicious position in verification module. In pre-filter module, it is realized that previous query result can accelerate the next query result to achieve high performance which is named stateful pre-filter [13]. In our paper, stateful pre-filter is applied to find the suspicious position in the file and is described in chapter 2.
Because of virus variation, the types of significant patterns become more complicated nowadays. Regular expressions (REs) can express significant patterns better than plain strings can do. The significant patterns expressed in REs are often simple. For instance, the patterns defined in Clam Anti-virus (ClamAV) [14] consist of plain strings and three operators:
*:match any number of symbols ?:match any symbol
{min, max}:match minimum of min, maximum of max symbols
We separate the REs with * operators. For convenience, we use “the first fragment of RE” to represent the substring in front of the first * operator of RE and “the first string of fragment” to represent the substring in front of the first {min, max} operator of fragment.
To detect RE, some algorithms like generalized AC [15], ClamAV, extend finite automata (XFA) [16], and Snort [17]-[18] were proposed already. Although these methods can detect RE, the performance or memory requirement may be unacceptable. Even worse is that they may cause false positive or false negative. Our goal is to propose higher performance with acceptable memory requirement for REs matching. It can be simply implemented by applying stateful pre-filter and a verification engine. After we separate the *
3
and {min, max} operator with appropriate method, the left substrings of REs can regard as plain strings. The only difference is that the substrings need to be matched in the order of REs. In our implementation, we only consider first fragments of every REs at first and consider entire fragments of every REs after any first fragment matches. However, it is not efficiency to consider entire fragments of every REs at the same time when the first fragment matched. It is better to reduce the effect caused by unnecessary fragments that would lower the performance. The proposed pattern matching system consists of a dynamic pre-filter module and a verification module. Dynamic pre-filter can only add information of a few fragments to accelerate the speed of search. It has CPU execution comparison with different methods in pre-filter module. The simulation result shows that dynamic method has better performance than the static method. The verification only verifies the possible state machine to save the time.
In the following section, we have problem definition and related work in chapter 2. In chapter 3, we describe the proposed methods for our pre-filter design. Then, we show the simulation result in chapter 4 and analysis our design in chapter 5. Conclusion is in chapter 6 to end the paper.
4
Chapter 2.
Problem definition and related work
2.1 Problem definition
There is a given database contained every significant patterns that derived from malicious code. We read the significant patterns from database first in order to construct a pattern matching system that can point out the starting position of significant pattern in the given file. Our system is consists of pre-filter module and verification module. In verification module, goto function, failure function, and output function processed as AC’s three functions do. Besides, fork function is an extra function in verification module which is added to process the {min, max} operator.
ClamAV is an open source anti-virus, so we can get its database easily. Therefore, in our paper, we use the same database in ClamAV for our simulation. The type of significant patterns in ClamAV’s database is simple regular expression. The simple regular expression consists of plain strings and three operators : *, ?, and {min, max}. We can only consider the * and {min, max} operators in our design. Because consecutive ? operators can be substituted for a {min, max} operator with min = max = number of ? operators.
5
2.2 Pre-filter
The information of significant patterns is stored in membership query modules (MQs). In pre-filter module, a window is used to scan the file and a block at the end of window is used to compare with the information of significant patterns in MQi , 1 ≤ i ≤ W-k+1 , where W is window size, k is block size and P1 p p11 12...p1W、 2 2 2 2
1 2... W
P p p p …Pn p p1n 2n...pWn are first W-byte of first string of each significant patterns where n is the number of significant patterns. Window size is chosen as the smallest length of first string of significant patterns because it will ignore some information of shorter patterns if window size is larger than smallest length of first string of significant patterns. Substrings of significant patterns 1j 1j 2j... j
k P p p p 、 2 2 3... 1 j j j j k P p p p … j j j1... j 1 i i i i k P p p p … j 1 j 1 j 2... j W k W k W k W
P p p p are stored in MQi for comparison, 1≤ i≤ W-k+1, 1 ≤ j ≤ n. MQi reports 1 iff the substring in block is the same as one of substrings in MQi and reports 0, otherwise. According to the report of MQi, we can shift the window to appropriate position. It is complicated to compare with all substrings in MQi step by step. Hence, HASH table is used to store the report of MQi previously.
2.2.1 HASH function
The report of MQi can be calculated in advanced and store the report in hash table by using hash function HASH. The hth bit of MQi reports 1 iff substring 1... 1
j j j j
i i i i k
P p p p
exists such that h = HASH P( ij), otherwise reports 0. Fig 1 is a diagram of hash table. Each MQi is a bit array with size 28k because the block size is k-byte = 8k-bit, there are 28k
possible entries. Hash table is a combination of these bit arrays of MQi. Elements in MQ0
6
Fig. 1 Hash table
The advantage of using hash function not only can store the report previously but also can reduce the size of hash table. The number of input bits can be reduced by hash function easily. For instance, if input bits = 3 bytes = 24 bits, we can simply take first 16-bit and last 16-bit XOR to get 16-bit only. Although it would increase the probability of collision, it is worth saving lots of memory space.
2.2.2 Pre-filter operation
We take an example to show the pre-filter operation. Assume P1 = “abcdefghi”, P2 = “uvwxyz” and text file is “aaabcdefff”. The window size W is chosen as the smallest length of significant patterns, i.e., W=6. Then, all of significant patterns are truncated into the same length W. For this example, P1‘ = “abcdef”, P2‘ = “uvwxyz”. Block exists at the end of window and the substrings in block will compare to the information in MQi. Therefore, block size k is chosen to be smaller than W definitely. We assume block size k = 3, there are W-k+1
7
= 4 MQi with different substrings in each. The substrings set of MQ1, MQ2, MQ3 and MQ4 are
{abc, uvw}, {bcd, vwx}, {cde, wxy} and {def, xyz} respectively. Figure 2 shows the Pre-filter operation.
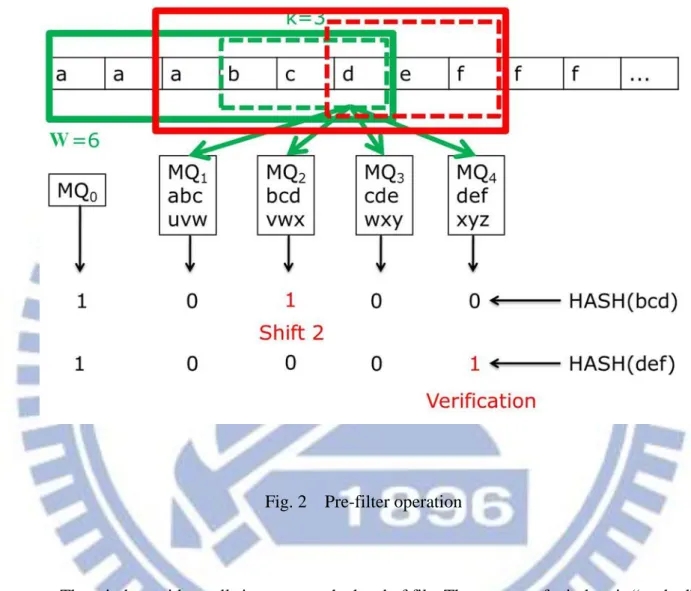
Fig. 2 Pre-filter operation
The window with small size starts at the head of file. The content of window is “aaabcd” and content of block with dash line is “bcd”. Then we process HASH (bcd) to get the report of MQi. It is obviously that MQ2 has substring ”bcd”, so the report is “10100”. After we get
“10100”, we shift the window by 2. The window with large size is the next position. Again, the content of window is “abcdef” and content of block with dash line is “def”. Then we process HASH (def) to get the report of MQi. It is obviously that MQ4 has substring ”def”, so
the report is “10001”. When the MQW-k+1 reports 1, we enter the verification module and find
8
2.3 Stateful Pre-filter
In previous section, window of pre-filter shift according to the query report of hash function. Stateful pre-filter [13] was proposed to enhance the window advancement by calculating all of previous query reports.
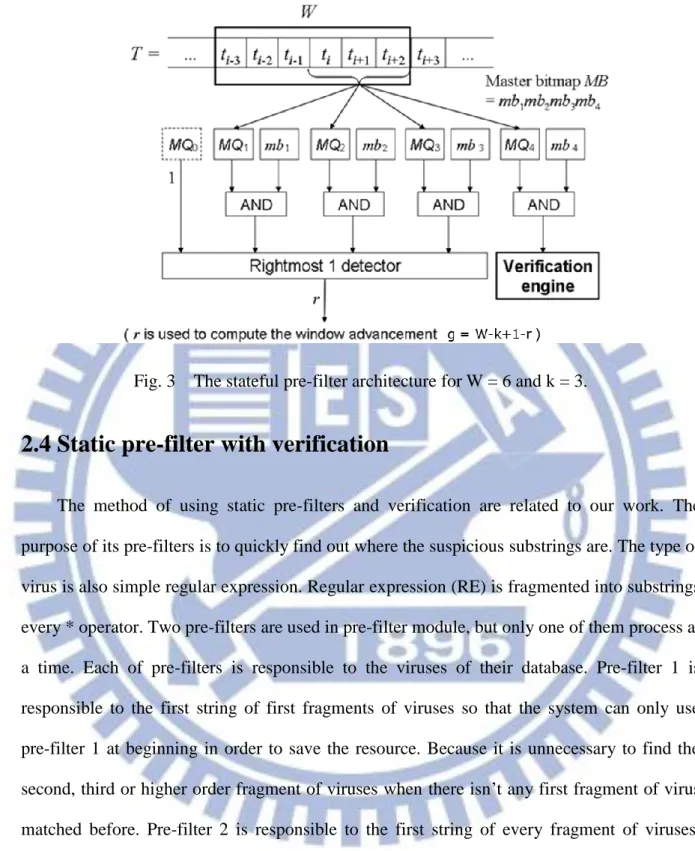
In section 2.2, we mentioned stateless pre-filter. To show the different of stateless pre-filter and stateful pre-filter, we take an example to illustrate the difference. For stateless pre-filter, if the report of round 1 is “11010”, then the window would shift by 1 and if the report of round 2 is “10110”, then the window would shift by 1 again. For stateful pre-filter, if the same reports happened, it can have better window advancement than stateless pre-filter. For stateful pre-filter, the report of round 1 “11010” not only informs the window about the shift but also excludes the impossible starting position of significant patterns. In other words, the report “11010” shows that it is impossible to find the significant patterns after window shift by 2. Therefore, after the window shift by 1 in round 1, it is unnecessary to shift by 2-1=1 in round 2. It can be implemented by using a bitmap to memorize the state of pre-filter by calculating all of previous query reports. The bitmap shifts the bit as window shift and AND the next query report to exclude the impossible position. The bitmap is named Master Bitmap (MB) and acts as state of pre-filter. Fig. 3 shows the architecture of stateful pre-filter. After pick up the right most 1 as shift value, the window and MB’ shift for next round. Stateful pre-filter is adopted in the following pre-filter module of this paper.
9
Fig. 3 The stateful pre-filter architecture for W = 6 and k = 3.
2.4 Static pre-filter with verification
The method of using static pre-filters and verification are related to our work. The purpose of its pre-filters is to quickly find out where the suspicious substrings are. The type of virus is also simple regular expression. Regular expression (RE) is fragmented into substrings every * operator. Two pre-filters are used in pre-filter module, but only one of them process at a time. Each of pre-filters is responsible to the viruses of their database. Pre-filter 1 is responsible to the first string of first fragments of viruses so that the system can only use pre-filter 1 at beginning in order to save the resource. Because it is unnecessary to find the second, third or higher order fragment of viruses when there isn’t any first fragment of virus matched before. Pre-filter 2 is responsible to the first string of every fragment of viruses. After any first fragment of viruses was found, pre-filter 2 begins processing. The verification module (verification engine) of this system is an extension of the AC algorithm that verifies the existence of virus at suspicious position. Several levels are created for fragments of REs with different order. The static pre-filter and verification are review separately below.
10
2.4.1 Static pre-filter
The pre-filter module is an extension of a bitmap-based stateful design [13]. Fragments are extracted from significant patterns in database to build two pre-filters. Regular expression is fragmented into substrings every * operator. Let M denote the maximum number of * operator in any REs. As a result, there are at most M1 fragments for each RE. Let Y , i
0 i M, be the set that contains the ith fragments of all REs in database. All plain strings only contain exactly one fragment and are included in Y . Pre-filter 1 is prepared to detect 0
first string in Y and Pre-filter 2 is prepared to detect first string in 0 Y0 Y1 Y2 ... YM. The first string of fragments means the substring in front of first {min, max} operator if {min, max} operator exist, otherwise the fragment itself is the first string.
The W1-byte prefix of every pre-filter 1 first string is used to construct Pre-Filter 1 where
m1 is chosen to be the shortest length of the first strings in Y . A parameter k0 1 (≦W1), called
block size, is selected to build membership query modules. There are m1-k1+1 membership
query modules, denoted by MQ11, MQ12, …, and
1 1
1 1
W k
MQ . According to the method mentioned in chapter 2.2, we can calculate the hash table 1 for pre-filter 1.
The parameters for pre-filter 2 are denoted by W2 and k2. Given these two parameters,
there are W2-k2+1 membership query modules, denoted by
2 1 MQ , MQ22, …, and 2 2 2 1 W k MQ ,
for pre-filter 2. For proper operation, it is required that k2≦W2. Again, according to the
method mentioned in chapter 2.2, we can calculate the hash table 2 for pre-filter 2.
11
5 {2, 4} {3,5} * * {2, 6}
RE pq qrqs tu vw x y, the sets of pre-filter 1 and pre-filter 2 first string of fragments are {abc ab bc pqr pq, , , , } and {abc ab bc pqr pq cd ad vs vw e x, , , , , , , , , , } , respectively. The parameter values can be chosen as W1=2, W2=1, and k1=k2=1. Given the
chosen parameter values, the strings {ab bc pq, , } are used to construct pre-filter 1 and the strings { , b, p, , , , }a c v e x are used to construct pre-filter 2.
2.4.2 Verification
The verification module is a modification of the generalized AC algorithm [15]. To process the simple REs, the generalized AC algorithm has a fork function for a {min, max} operator. The verification module also uses a fork function to handle the {min, max} operator as generalized AC dose. The difference is that in verification module, multiple goto graphs are constructed for * operator. So that the information of processing pattern matching is remembered by traversing different goto graphs. There are four functions: goto, failure, output and fork that are described below.
The goto function
A regular expression is fragmented into substrings every * operator. If M denote the maximum number of * operators in any RE, there are M1 G graphs for each Y . The i G
graph constructed for Y is called the Level i i G graph and denoted by G . Similarly, if i
N denote the number of {min, max} operators in Y , there are i N T graphs in Y . i T
graphs constructed for Y are called the Level i i T graphs.
A goto graph, denoted by G , is constructed with algorithm AC1 [4] for all of the first 0
12
goto graphs are constructed for the remains parts in Y , are called Level 0 T graphs. The 0
difference is that self-loop exists at starting state. Goto graphs of other levels can be constructed similarly. Figure 4 shows the goto graphs of previous example.
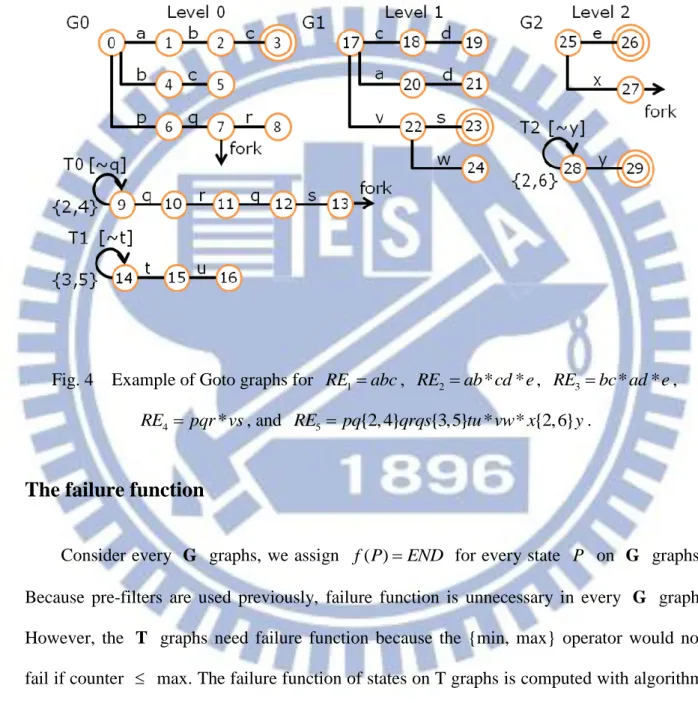
Fig. 4 Example of Goto graphs for RE1abc, RE2 ab cd e* * , RE3 bc ad e* * ,
4 *
RE pqr vs, and RE5 pq{2, 4}qrqs{3,5} *tu vw x* {2, 6}y.
The failure function
Consider every G graphs, we assign f P( )END for every state P on G graphs. Because pre-filters are used previously, failure function is unnecessary in every G graph.
However, the T graphs need failure function because the {min, max} operator would not fail if counter max. The failure function of states on T graphs is computed with algorithm
AC2 [4]. Table 1(a) shows the failure function for the example used in Fig. 4. In this table, the state number of the ( , )i j th entry is 10*i j and value 0 for f P( )represents the END. The symbol ”-” means failure never occurs in this state.
13 ( ) f R 0 1 2 3 4 5 6 7 8 9 0 0 0 0 0 0 0 0 0 0 - 1 9 9 10 9 - 14 14 0 0 0 2 0 0 0 0 0 0 0 0 - 28 (a) State S 3 23 26 29 ( ) output S RE 1 RE 4 RE ,2 RE 3 RE 5 (b)
Table 1(a) The failure function and (b) the output function for the example used in Fig. 4.
The output function
Consider G and T graphs, we assign output P( ) for every state P on G and
T graphs. If state P is the end of some R in one of REs, then state i P is a final state and
( ) ( ) { }
output P output P i . On goto graphs, a final state is represented by a double circle.
Table 1(b) shows the final states and the matched patterns for the example used in Fig. 4. The output of other state is empty. Similar to the information of final states, if state R is the end of some fragments, then state R is a fragment-end state and
( ) ( ) { }
Leveloutput R Leveloutput R i .
The fork function
The fork function is adopted to solve the {min, max} operator. Consider every G graph,
we assign F P( ) for every state P on G graphs. If state P is the first string of some fragments with {min, max} operator, then F P( ) stores minmin, maxmax , and
_
forked state= the start state of the T graph constructed with the second string. Here,
14
operator which separates the first and the second strings in a same fragment. To complete a fragment, there would be some T graphs that have created one after another to solve all of
{min, max} operators in a fragment. For convenience, a state with non-empty fork function is called a fork state.
15
Chapter 3.
Proposed Algorithm
In related work, we introduce a method consists of a static pre-filter module and a verification module. It is inefficient that pre-filter 2 of static pre-filter contains first string of all fragments in Y0 Y1 Y2 ... YM once first fragment of any regular expressions
matched. Therefore, we figure out dynamic pre-filter method to solve this problem and achieve higher performance. Before first fragment of any REs matched, we only use pre-filter 1 to save the resource. The hash table of pre-filter 1 is a little different in dynamic method and is described below.
3.1 Hash tables of dynamic pre-filter
The length of REs in Fig. 4 is short, so we use another example in this chapter, RE1 =
abcdefghi*12345 and RE2 = uvwxyz*9876543210. In static pre-filter method, the sets of
pre-filter 1 and pre-filter 2 first string of fragments are {abcdefghi, uvwxyz} and {abcdefghi, uvwxyz, 12345, 9876543210}, respectively. The parameter values can be chosen as W1=6,
W2=5, and k=k1=k2=3. Given the chosen parameter values, the strings {abcdef, uvwxyz} are
used to construct hash table 1 of pre-filter 1 and the strings {abcde, uvwxy, 12345, 98765} are used to construct hash table 2 of pre-filter 2. Once any fragments in pre-filter 1 matched, pre-filter 2 is being substitute for pre-filter 1 in pre-filter module. However it’s inefficiency to contain first string of all fragments at the same time in pre-filter 2 once the first fragment of any REs matched. Hence, we proposed the idea of dynamic pre-filter that can only add information of the next fragment according to what fragment matched before. For this
16
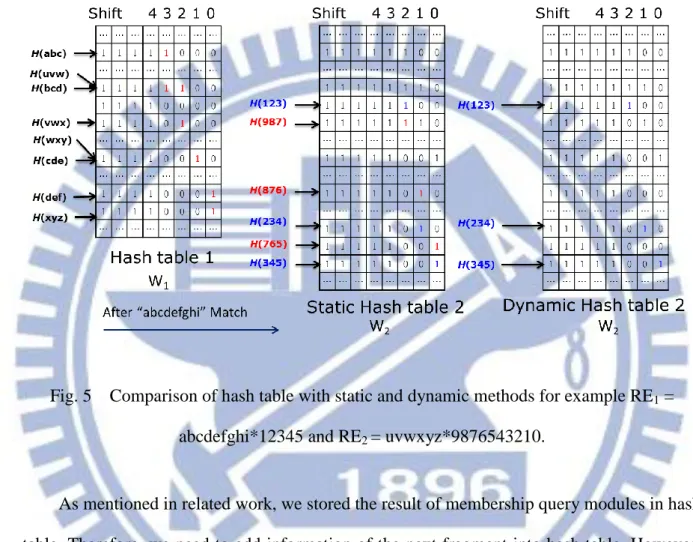
example, if “abcedfghi” matched, strings in hash table 2 of pre-filter 2 are only {abcde, uvwxy, 12345} that is less than static pre-filter method. Fig 5 is the comparison of hash table with static and dynamic methods, where H() represents the hash function.
Fig. 5 Comparison of hash table with static and dynamic methods for example RE1 =
abcdefghi*12345 and RE2 = uvwxyz*9876543210.
As mentioned in related work, we stored the result of membership query modules in hash table. Therefore, we need to add information of the next fragment into hash table. However, the process of adding information needs to cut the m2-byte prefix of the next fragment and
stored the information into hash table W2-k2+1 times. Both processes are burdensome.
Fortunately, we can store the information into hash table first and only stored the hash value (index of table) at the state in verification module where previous fragment ends. Which result stored in hash table is valuable is the only thing we need to know. Hence, we use the first bit of hash table as our controlling bit. The first bit reports 1 when the result is valuable and reports 0 otherwise.
17
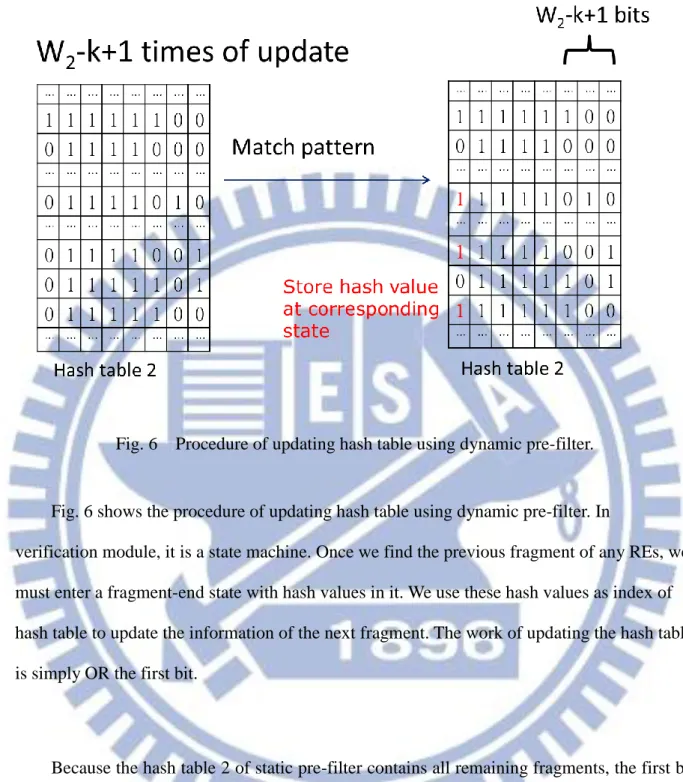
Fig. 6 Procedure of updating hash table using dynamic pre-filter.
Fig. 6 shows the procedure of updating hash table using dynamic pre-filter. In
verification module, it is a state machine. Once we find the previous fragment of any REs, we must enter a fragment-end state with hash values in it. We use these hash values as index of hash table to update the information of the next fragment. The work of updating the hash table is simply OR the first bit.
Because the hash table 2 of static pre-filter contains all remaining fragments, the first bit of query result is always 1. It is obviously that dynamic pre-filter can decrease the burden of pre-filter 2. Although the information of fragments already exist in pre-filter 2, it is valuable only in the situation that the first bit of query report is 1. In other words, if first bit of query report is 0, the window of pre-filter 2 can shift maximum shift W2-k2+1 which is faster than
18
3.2 Hash functions
Collision may be happened if two different substrings get the same hash value. To avoid the effect of collision, we use two hash functions in our pre-filter module, hash function A and hash function B.
For example, if substrings “bcd”、“uvw” get the same hash value in hash function A, and substrings “cde”、“uvw” get the same hash value in hash function B. If we only use hash function A, HA(uvw) has information of two substrings that would decrease the shift of
window. If two hash functions are used, we can AND the reports of two hash functions to get rid of the effect of collision. Fig. 7 is the diagram of two hash functions.
19
3.3 Operation of dynamic pre-filter
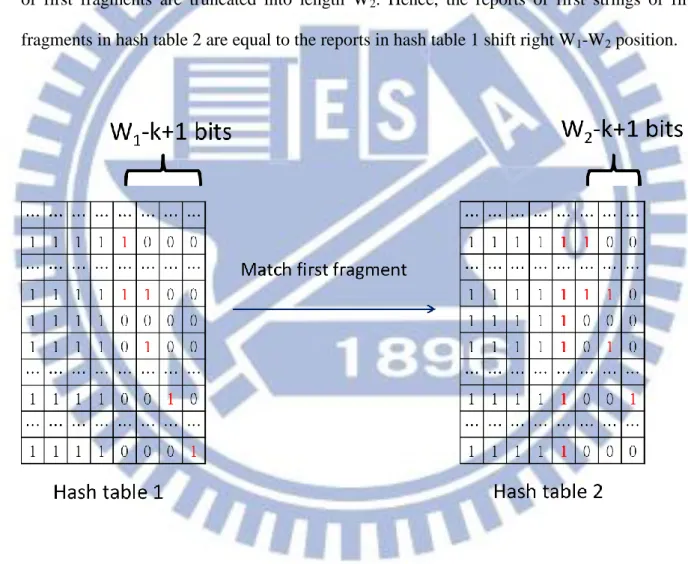
The size of pre-filter 1 and pre-filter 2 would not be the same so we need two hash tables shown in Fig. 8. After first fragment of any REs is matched, we used hash table 2 for pre-filter 2 and add information of the next fragment using dynamic pre-filter method. The first bit is also used as controlling bit. The information of first strings of first fragments is also in hash table 2 and the controlling bit is initialized to 1. The difference is that the first strings of first fragments are truncated into length W2. Hence, the reports of first strings of first
fragments in hash table 2 are equal to the reports in hash table 1 shift right W1-W2 position.
Fig. 8 Two hash tables for different size of window
The main idea of dynamic pre-filter is not only decreasing the effect of other fragments that is unnecessary but also shifting the maximum position with large window size. However, if we change the table once we encounter the first fragment of virus, the performance would
20
become worse tempestuously. Fortunately, we can use the length of next fragment which is going to be added in the hash table to distinguish whether we should change the table or not.
In our example, the large window size is 6, the small window size is 5 and block size is 3. According to the stateful pre-filter, the maximum shift of large window size is 4 and the maximum shift of small window size is 3. If the length of next fragment which is going to be added in the hash table is greater than 6, substitution of hash table is unnecessary. In other word, we can still shift the maximum shift with large window size. It can be implemented by adding the information of next fragment step by step which is the characteristic of dynamic pre-filter. If the length of next fragment which is going to be added in the hash table is smaller than 6, we use the hash table 2 of pre-filter 2 in pre-filter module.
There are two hash tables for two pre-filters and two hash functions for each pre-filter to decrease the effect of collision, so there are totally four hash tables to build. In dynamic method, we can calculate the first strings of first fragments and enable the first controlling bit. Also, we need to calculate the first strings of other fragments whose length are greater than or equal to W1 in advanced with controlling bit = 0. Once we need to add the fragment whose
first string is greater than or equal to W1, we need to update the controlling bit of both hash
table 1 and hash table 2. If the length of first string of the next fragment is smaller than W1,
pre-filter module needs to change from hash table 1 to hash table 2, so we need to update both hash tables. The controlling bits of other entries that is never used are initialized with zero.
21
Chapter 4.
Simulation
4.1 Performance comparisons between static pre-filter and
dynamic pre-filter
In this section, we compare the performance of our proposed signature matching system with static and dynamic methods in terms of throughput performances. Programs are coded in C++ and the experiments are conducted on a PC with an Intel Core2 Quad CPU operated at 2.83GHz with 4.00GB of RAM.
As mentioned in problem definition of chapter 2, we use the same database as ClamAV does. There are 30008 simple regular expressions. 1019 REs of them are REs with * operator and 407 REs of them are REs with {min, max} operator. In database, the maximum number of * operators in one simple RE is five which means there are six levels created for
verification module. The maximum number of max and minimum number of min are 122 and 1 respectively. The minimum length of first string of level 0 is 10 which is also the window size of pre-filter 1. The window size of pre-filter 2 is 8. The block size is 4 and the size of hash table is 220*1byte. We use two different hash functions and AND their query reports to avoid the false positive collision. One is to pick up the right 20 bits and left 20 bits XOR, the other is to pick up the right 20 bit only as reference of hash table.
22
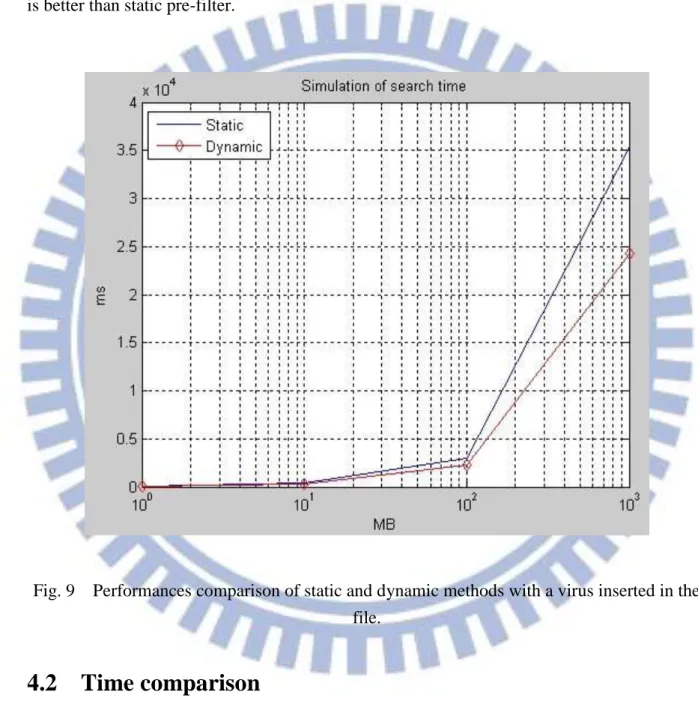
We use pre-filter module to find the suspicious position. Figure 9 shows the comparison of CPU execution time for randomly generated files of various sizes with a virus in it. It can be seen that the CPU execution time is proportional to file size. The speed of dynamic pre-filter is about 32 % faster than the speed of static pre-filter. Therefore, dynamic pre-filter is better than static pre-filter.
Fig. 9 Performances comparison of static and dynamic methods with a virus inserted in the file.
4.2 Time comparison
In this section, we compare the time in pre-filter module and in verification module. We do not take the time of reading the file into consideration because whatever algorithms need
23
to read the file first. Saving the time of reading the file may be the other topic that is out of our research.
4.2.1 Pre-filter module
The procedure in pre-filter module is as following. First, get the substrings from block. Second, put the substrings into hash function to get the report in hash table and AND with the master bitmap which acts as the state of pre-filter. Final, if MQW-k+1 reports 1, then enters the
verification module to verify, otherwise, shift the window according to the master bitmap. In above procedure, numbers of shift and usage amount of hash function are two major
components that affect the time in pre-filter module the most. Fig. 10 shows the performance comparison of static and dynamic methods in pre-filter module only.
Fig. 10 Performances comparison of static and dynamic methods in pre-filter module with a virus inserted in the file.
24
Table 2 shows the comparisons of numbers of shift between static and dynamic methods. The dynamic pre-filter is better than static pre-filter because dynamic pre-filter can not only decrease the effect of other fragments that is unnecessary but also shift the maximum shift with large window size that lower the numbers of shift.
1MB 10MB 100MB 500MB 1GB
Static 209,889 2,098,673 20,986,607 104,933,008 214,902,796 Dynamic 150,008 1,499,769 14,997,607 74,988,008 153,575,435
Table 2 Comparisons of numbers of shift in pre-filter module between static and dynamic methods.
4.2.2 Verification module
Fig. 11 shows the performance comparison of static and dynamic methods in verification module only. It is obviously that CPU execution time in pre-filter module is the major part of search time, because our hash table is large enough to decrease the verification count. If hash table is small, the effect of collision increases. Hence, the probability of MQW-k+1=1 increases
25
Fig. 11 Performances comparison of static and dynamic methods in verification module with a virus inserted in the file.
Table 3 shows the comparisons of verification count between all methods mentioned in chapter 3. The method using dynamic pre-filter have the fewer verification counts because dynamic pre-filter can decrease the effect of other fragments that is unnecessary. Therefore, the window of dynamic pre-filter would not stop for the fragments that are excluded from dynamic pre-filter. For example, some query reports whose MQW-k+1 is 1 but first bit is 0 are
excluded. The result of smaller verification count can save the time.
1MB 10MB 100MB 500MB 1GB
Static 91 663 6,604 33,004 67,586
Dynamic 70 522 5,203 26,003 53,251
26
The method of using dynamic pre-filter needs update in verification module. When we find a fragment, we enter a state. There are W-k+1 hash values at this state. We update the hash table according to the hash value to add the information of next fragment into the dynamic pre-filter. Fortunately, the time of update is about 180ms/per 10^6 hash function which is less than the time we enhance.
4.3 Memory requirement
Dynamic Pre-filter needs update, so hash values are stored at corresponding states as extra memory compared with static method. In verification, it also needs some extra memory to store the index of REs to get the length of next fragment and maximum shift value or extra hash tables. Therefore, we list the memory usage of different parts as Table 4.
variable size static dynamic purpose
Pre-filter
PreFilter1A 1,048,576 hash_tableA of prefilter1 PreFilter2A 1,048,576 hash_tableA of prefilter2 PreFilter1B 1,048,576 hash_tableB of prefilter1
(avoid collision)
PreFilter2B 1,048,576 hash_tableB of prefilter2 (avoid collision)
verification
State 1,266,653 information of each state such as type or table index S_leaf 403,871 155,335 information of leaf state
like ID and table index of hash_table Hash_value 70,840 X hash_value of next fragment
Store 652,407 store ID and endposition
during scanning FSCTable 272,192 B2Table 61,750 B3Table 21,510 B4Table 12,620 B5Table 7,550 B256Table 1,010,688
27
Len 20,380 X length of next fragment
Total 9,748,339 9,994,894
extra 246,555
Table 4 List of memory usage in pre-filter and verification module.
It is possible that dynamic method has better performance because of the extra memory usage. Hence, we have the simulation with the memory usage of static method is greater than the memory usage of dynamic method. We can decrease the size of hash table to make the memory usage of dynamic method lower than memory usage of static method. The difference of memory usage between dynamic and static is less than 256k bytes. Therefore, we decrease the size of hash table in pre-filter module to 2^19 for dynamic method to have less memory in dynamic method. The simulation result shows in Fig. 12. The dynamic method is still better.
Fig. 12 Performance comparison of static and dynamic methods with less memory requirement in dynamic method.
28
Chapter 5.
Analysis
In analysis, we calculate the average window advancement with different number of fragments in hash table. Although in pre-filter module, we put the information of fragments into hash table in advanced, it does not work if the controlling bit is disabled. Thus, in dynamic method, we can regard number of fragments whose controlling bit is enabled as number of fragments in hash table.
5.1 Average window advancement
Before we calculate average window advancement, we need to define some variables that will use in the following. Let L be the number of hash functions used in a pre-filter, y represents number of fragments in hash table and N is the entries of hash table. We AND every query report from hash tables with different hash functions to get QB, so QB = QB1 &
QB2 & QB3 & …& QBL = qb1qb2qb3…qbW-k+1. The parameter ρ represents the probability
of qbi =1, 1≤ i ≤ W-k+1, and ρ =can be calculated by
ρ = [1-(1-1/N)y
]L (1)
Markov chain is adopted to analyze the average window advancement. In pre-filter module master bitmap needs to bitwise-AND with QB and window advances according to the result of MB&QB. Let MB&QB = mb1mb2…mbW-k+1, then mbW-k+1 is used to determine
29
advancement. Therefore, states of Markov chain correspond to the value of mb1mb2…mbW-k,
i.e., there are 2W-k states on the Markov chain.
If Xl be the state after the lth iteration of queries, then state transition probabilities from state i to state j can be defined as pj i, P X( l1 j X| l i) that will compute in next section. Once pj i, is given, we can calculate the stationary probability distribution Π = (π0, π
1, …, 2W k 1 ) as following equation. 0,0 0, 0,2 1 0 0 ,0 , ,2 1 2 1 2 1 2 1,0 2 1, 2 1,2 1 W k W k W k W k W k W k W k W k i j j i j i i i p p p p p p p p p (2)
Note that summation of probability of every state equals to 1, i.e., π0 + π1 + … +
2W k 1
=1. Therefore, eq. (2) can turn into the following format.
0,0 0, 0,2 1 0 ,0 , ,2 1 2 1 2 1,0 2 1, 2 1,2 1 1 1 0 1 1 0 0 1 1 0 1 1 1 1 0 W k W k W k W k W k W k W k i j j i j i i p p p p p p p p p (3)
30
window advancement and gi represents the corresponding shift value for every state. Then
L G can be calculated by 2 1 0 W k L i i i G g
(4)5.2 Derivation of Pj,i
As mentioned above, state transition probabilities pj i, P X( l1 j X| l i) . Let
1 2 0
W k W k
ii i i , j jW k 1jW k 2j0 and window advancement = g in state i. Let
1 2 0
' 'W k 'W k '
i i i i be the right-shifted master bitmap in state i. Then, there are two cases discuss below.
In case 1, if g=W-k+1, then i=0W-k and i’=1W-k. The state transition probabilities
, (1 )
x W k x
j i
p , where x is number of 1’s in j. In case 2, if g<W-k+1, then
1 1 10
g
W k g
ii i and i' 1 giW k 1ig. The state transition probabilities pj i, 0 if there exist r, 0≤r≤W-k-1 such that i’r=0 and jr=1, otherwise, , 1(1 ) 1 2
x W k x x
j i
p , where x1 is
number of 1’s in j and x2 is number of 0’s in i’.
5.3 Numerical result
We adopt the value of parameters used in chapter 4 to evaluate the average window advancement. Because the window size is different in two pre-filter, we have W=10 and W=8. The other parameters are k=4, N=220, L=2 and y is the number of fragments in hash table. Fig. 13 shows the average window advancement with different number of fragments in hash table.
31
Fig. 13 Average window advancement with various number of fragments in hash table with N=220.
It is obviously that average window advancement is close to the maximum window advancement. It’s because our hash table is large enough to handle the fragments up to 40000. Once a first fragment of RE was found, dynamic pre-filter can still perform the average window advancement with the better situation W=10 if length of the next fragment is larger than or equal to 10.
If hash table is full of fragments, the average window advancement decrease as shown in Fig. 14. In Fig. 14, we decrease the size of hash table to make it full of fragments. However, even with the same window size in situation of Fig. 14, number of fragments in hash table of dynamic method is less than number of fragments in hash table of static method. The average window advancement is bigger with fewer fragments in hash table. In consequence, dynamic
32
method can perform better average window advancement than static method.
Fig. 14 Average window advancement with various number of fragments in hash table with N=215.
33
Chapter 6.
Conclusion
In this thesis, we have proposed a pattern matching system that consists of a dynamic pre-filter module and a verification module for both plain strings and simple REs. The purpose of dynamic pre-filter module is to quickly find the starting positions of suspicious substrings which may result in match of some signatures. It is implemented by adding substrings information step by step to accelerate the speed of search. Moreover, we can still use window with large size if length of the next fragment is larger than or equal to W1, so the
window can shift more due to the large window size.
We have discussed static and dynamic methods in pre-filter module and have compared two methods in simulation result in time complexity and memory complexity. Even with less memory requirement, dynamic pre-filter can perform better. The advantage of dynamic pre-filter is to decrease the effect of the additional information. As a result, the dynamic pre-filter achieves high performance in pre-filter module. It is interesting to detect the patterns in different expressions.
34
References
[1] S. E. Schechter, J. Jung, and A. W. Berger, "Fast detection of scanning worm infections," 7th International Symposium on Recent Advances in Intrusion Detection (RAID), French Riviera, September 2004.
[2] D. E. Knuth, J. H. Morris, and V. R. Pratt, “Fast pattern matching in strings,” TR CS-74-440, Stanford University, Stanford, California, 1974.
[3] R. S. Boyer and J. S. Moore, “A fast string searching algorithm,” Communications of the ACM, Vol. 20, October 1977, pp. 762-772.
[4] A. V. Aho and M. J. Corasick, “Efficient string matching: an aid to bibliographic search,” Communications of the ACM, Vol. 18, June 1975, pp. 333-340.
[5] S. Wu and U. Manber, “A fast algorithm for multi-pattern searching,” TR-94-17, 1994. [6] B Bloom, “Space/time trade-offs in hash coding with allowable errors,” ACM, 13(7):
422–426, May 1970.
[7] A. Broder and M. Mitzenmacher, “Network applications of Bloom filters:a survey,” Internet Mathematics, vol. 1, no. 4, pp. 485–509.
[8] S. Dharmapurikar, P. Krishnamurthy, T. Sproull, and J. Lockwood,“Deep packet inspection using parallel Bloom filters,” IEEE Micro, vol. 24, no. 1, pp. 52–61, Jan./Feb. 2004.
[9] M. Attig, S. Dharmapurikar, and J. Lockwood, “Implementation results of Bloom filters for string matching,” Field-Programmable Custom Computing Machines, pp. 322–323, Apr. 2004.
[10] S. Dharmapurikar, P. Krishnamurthy, and D. E. Taylor, “Longest prefix matching using Bloom filters,” IEEE/ACM Transactions on Networking, vol. 14, pp. 397–409, Apr. 2006.
35
[11] N. S. Artan and H. J. Chao, “Multi-packet signature detection using prefix Bloom filters,” IEEE GLOBECOM, vol. 3, pp. 1811–1816, 2005.
[12] N. S. Artan, K. Sinkar, J. Patel, and H. J. Chao, “Aggregated Bloom filters for intrusion detection and prevention hardware,” IEEE GLOBECOM, pp. 349–354, Nov. 2007. [13] T. H. Lee and N. L. Huang, “A Pattern Matching Scheme with High Throughput
Performance and Low Memory Requirement,” IEEE/ACM Transactions on Networking.
[14] Clam anti virus signature database, www.clamav.net.
[15] T. H. Lee, “Generalized Aho-Corasick algorithm for signature based anti-virus applications,” IEEE ICCCN 2007.
[16] R. Smith, C. Estan, and S. Jha, “XFA: Fast signature matching with extended automata,” In IEEE Symposium on Security and Privacy, May 2008.
[17] Snort website http://www.snort.org/.
[18] M. Roesch, “Snort – lightweight intrusion detection for networks,” Proceedings of LISA’99: 13th Systems Administration Conference, pp.s229–238, Nov. 1999.
101 碩 士 論 文 動 態 過 濾 器 應 用 在 偵 測 病 毒 特 徵 碼 防 毒 軟 體 交 通 大 學 電 信 工 程 研 究 所 碩 士 班 電 機 學 院 王 廣 煜