科技部補助專題研究計畫成果報告
期末報告
以 VBS RTK GPS 輔助 UAV 熱影像定位定向之研究
計 畫 類 別 : 個別型計畫 計 畫 編 號 : NSC 102-2119-M-004-001- 執 行 期 間 : 102 年 08 月 01 日至 103 年 07 月 31 日 執 行 單 位 : 國立政治大學地政學系 計 畫 主 持 人 : 邱式鴻 計畫參與人員: 碩士班研究生-兼任助理人員:許翎依 博士班研究生-兼任助理人員:陳承一 報 告 附 件 : 出席國際會議研究心得報告及發表論文 處 理 方 式 : 1.公開資訊:本計畫涉及專利或其他智慧財產權,2 年後可公開查詢 2.「本研究」是否已有嚴重損及公共利益之發現:否 3.「本報告」是否建議提供政府單位施政參考:否中 華 民 國 103 年 11 月 07 日
中 文 摘 要 : 熱像儀獲取之地表溫度變化常反映地物重要資訊,若能提高 其空間解析度,將可擴展其應用領域,故本研究嘗試以單旋 翼無人機系統(Unmanned Aircraft System, UAS)酬載熱像 儀,期更有效率地蒐集高解析度熱影像,供防災、環境監測 使用。但熱控制點佈設不易,本研究欲以 GPS 輔助單旋翼 UAS 熱影像定位定向,降低地面控制點需求,故於 UAS 上加 裝 Trimble BD970 GNSS OEM 接收模組,以 VBS-RTK
(Virtual Base Station -Real Time Kinematic, VBS-RTK) GPS 定位技術,將 GPS 觀測資訊作為空中控制使用。但此需 解決 GPS 天線相位中心與相機透視中心之偏移量(即 GPS 天線 偏移量)的問題,故本研究基於光束法空中三角測量平差,視 GPS 天線偏移量為一定值,發展一數學模式,解決此偏移量 的問題。此外,熱像儀屬於非量測型相機,本研究以野外率 定場法,執行熱像儀率定,取得較精確之相機參數,供後續 空中三角測量平差使用。 由模擬資料驗證本研究所發展模式之可行性,且得知 GPS 天 線偏移量於具有其對應之觀測量約制且 GPS 觀測量精度高 時,可成功解算 GPS 天線偏移量;而於真實資料中,因 GPS 觀測量精度不佳,即使有 GPS 天線偏移量觀測量約制,仍無 法成功解算 GPS 天線偏移量,但其精度已經可供防災與監測 之用。雖真實資料之 GPS 觀測量精度不佳,但於影像連結性 佳之情形下,仍可達到有效之空中控制,降低地控點之需 求。 中文關鍵詞: 無人機系統、虛擬主站即時動態定位、熱影像、定位定向、 光束法空三平差、熱像儀率定
英 文 摘 要 : Thermal infrared images can show the temperature change of objects that represent the significant characteristics; therefore they have been applied on many fields. With the development of UAS (Unmanned Aircraft Systems), the thermal infrared camera can be carried on the Helicopter UAS to collect thermal images with high resolution in a local area more efficiently. However, the ground control marks for thermal images are uneasy to be set up. In this study, the Trimble BD970 GNSS OEM board will be carried on the Helicopter UAS to collect GPS data by VBS-RTK GPS technique to support the bundle
adjustment for the positioning and orientation of collected thermal images, i.e. AT(Aerial
Triangulation). In theory, the GPS antenna offset is not changed and can be viewed as constant. Therefore, in this study, the new model based on bundle
adjustment will be developed to solve GPS antenna offset, exterior orientation parameters and the object coordinate of tie points simultaneously by unified least squares adjustment. Besides, thermal infrared camera is a non-metric camera. In order to acquire high precision camera parameters for AT, thermal infrared camera will be calibrated by field method.
In this study, the simulated tests verify the feasibility of the new developed model for GPS
supported aerial triangulation and show that the GPS antenna offset can be solved based on the ideal accuracy of GPS observations and the observation constraint of GPS antenna offset. Due to the bad accuracy of GPS observations in real data collection, the GPS antenna offset can be not solved. Although the accuracy of GPS observations is bad, the GPS observations can also be used to support the bundle adjustment for the positioning and orientation of thermal images under better block geometry and ground control points still can be reduced.
英文關鍵詞: : Unmanned Aircraft System、VBS-RTK GPS、Thermal Images、Positioning and Orientation、Bundle Adjustment Aerial Triangulation、Thermal Camera Calibration
行政院科技部補助專題研究計畫
□期中進度報告
■期末報告
以 VBS-RTK GPS 輔助 UAV 熱影像定位定向之研究
VBS-RTK GPS Supported Positioning and Orientation for UAV
Thermal Images
計畫類別:■個別型計畫 □整合型計畫
計畫編號:NSC 102-2119-M-004-001
執行期間:102 年 08 月 01 日至 103 年 7 月 31 日
執行機構及系所:國立政治大學地政學系
計畫主持人:邱式鴻
共同主持人:
計畫參與人員:陳承一、許翎㳖
本計畫除繳交成果報告外,另須繳交以下出國報告:
□赴國外移地研究心得報告
□赴大陸地區移地研究心得報告
■出席國際學術會議心得報告及發表之論文
□國際合作研究計畫國外研究報告
處理方式:除列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年▉二年後可公開查詢
中華民國 103 年 08 月 31 日
1行 政 院 科 技 部 專 題 研 究 計 畫 成 果 -期 末 報 告
摘要
熱像儀獲取之地表溫度變化常反映地物重要資訊,若能提高其空間解析度,將可擴展其 應用領域,故本研究嘗試以單旋翼無人機系統(Unmanned Aircraft System, UAS)酬載熱像儀, 期更有效率地蒐集高解析度熱影像,供防災、環境監測使用。但熱控制點佈設不易,本研究 欲以GPS輔助單旋翼UAS熱影像定位定向,降低地面控制點需求,故於UAS上加裝Trimble BD970 GNSS OEM 接 收 模 組 , 以 VBS-RTK (Virtual Base Station -Real Time Kinematic, VBS-RTK) GPS定位技術,將GPS觀測資訊作為空中控制使用。但此需解決GPS天線相位中心 與相機透視中心之偏移量(即GPS天線偏移量)的問題,故本研究基於光束法空中三角測量平差, 視GPS天線偏移量為一定值,發展一數學模式,解決此偏移量的問題。此外,熱像儀屬於非 量測型相機,本研究以野外率定場法,執行熱像儀率定,取得較精確之相機參數,供後續空 中三角測量平差使用。 由模擬資料驗證本研究所發展模式之可行性,且得知GPS天線偏移量於具有其對應之觀測量 約制且GPS觀測量精度高時,可成功解算GPS天線偏移量;而於真實資料中,因GPS觀測量精 度不佳,即使有GPS天線偏移量觀測量約制,仍無法成功解算GPS天線偏移量,但其精度已 經可供防災與監測之用。雖真實資料之GPS觀測量精度不佳,但於影像連結性佳之情形下, 仍可達到有效之空中控制,降低地控點之需求。 關鍵字:無人機系統、虛擬主站即時動態定位、熱影像、定位定向、光束法空三平差、熱像 儀率定
Abstract
Thermal infrared images can show the temperature change of objects that represent the significant characteristics; therefore they have been applied on many fields. With the development of UAS (Unmanned Aircraft Systems), the thermal infrared camera can be carried on the Helicopter UAS to collect thermal images with high resolution in a local area more efficiently. However, the ground control marks for thermal images are uneasy to be set up. In this study, the Trimble BD970 GNSS OEM board will be carried on the Helicopter UAS to collect GPS data by VBS-RTK GPS technique to support the bundle adjustment for the positioning and orientation of collected thermal images, i.e. AT(Aerial Triangulation). In theory, the GPS antenna offset is not changed and can be viewed as constant. Therefore, in this study, the new model based on bundle adjustment will be developed to solve GPS antenna offset, exterior orientation parameters and the object coordinate of tie points simultaneously by unified least squares adjustment. Besides, thermal infrared camera is a non-metric camera. In order to acquire high precision camera parameters for AT, thermal infrared camera will be calibrated by field method.
In this study, the simulated tests verify the feasibility of the new developed model for GPS supported aerial triangulation and show that the GPS antenna offset can be solved based on the ideal accuracy of GPS observations and the observation constraint of GPS antenna offset. Due to the bad accuracy of GPS observations in real data collection, the GPS antenna offset can be not solved. Although the accuracy of GPS observations is bad, the GPS observations can also be used to support the bundle adjustment for the positioning and orientation of thermal images under better block geometry and ground control points still can be reduced.
Keywords: Unmanned Aircraft System、VBS-RTK GPS、Thermal Images、Positioning and Orientation、Bundle Adjustment Aerial Triangulation、Thermal Camera Calibration
一、 前言
熱影像是由熱紅外波段萃取可見光影像無法獲取之溫度資訊,通常偵測到地物之溫度變 化與其自然環境間常具有特殊意義,又因其拍攝時間不受晝夜限制,使得近年來熱影像應用 愈來愈廣泛,諸如應用在環境監控及災害防治等領域。目前取得熱影像之方式,約略可分為 三方面:地面、空中及太空。 於地面近距離獲取熱影像之應用方面:James et al. (2009)以熱影像取得熔岩現場狀況之資 訊,以便得知熔岩停止及冷卻地點;而 Ham et al. (2012)藉由熱影像與可見光影像,執行建築 物影像密匹配,快速地三維重建,以獲取建物位置及溫度資訊,即時找尋隔熱裝置毀損或較 差之部分,幫助建物所有權人與設施管理人員修補隔熱裝置,避免不必要之能源浪費。 於太空獲取熱影像之應用方面:Tronin et al. (2000)藉由衛載熱紅外波段偵測中國與日本 地區之地震帶所發出之輻射資訊,探討熱紅外波段對預測地震之可行性;亦有利用衛載熱紅 外波段偵測地下水之應用,尋找地下水流經之處(Avery,1992)。 於空中獲取熱影像之應用方面:Faux et al. (2001)則利用熱影像對河水及溪流之溫度進行 監測,尋找出溫度較高之部分,針對此部分予以降溫至符合該生物棲地適合之溫度,執行復 育之工作;Miraliakbari et al. (2010)研究中,利用無人飛行載具機系統(Unmanned Aircraft System, UAS)搭載光學相機及熱像儀,將所獲取之熱影像執行光束法空三平差處理後,利用 光達資料產製 DSM,接續產製正射影像,將可見光影像與熱影像之正射影像進行影像融合, 作為判釋使用。Hartmann et al. (2012)則以 UAS 酬載熱像儀取得熱影像經過空三平差處理程序 後,產製 DSM 後,並產生地面解析度為 5 公分之正射影像。 而以 UAVS 航拍取得熱影像後續相關處理與分析時必須先將熱影像精確定位定向,因此 本計畫將研究如何以 VBS RTK GPS 輔助 UAS 航拍之熱影像進行精確之地理定位定向,供 後續精確熱影像正射糾正鑲嵌及相關資料分析之用。二、 研究目的
過去由於手持式熱感測器技術尚未成熟,使得熱影像來源大部分來自衛載熱感測器,如 LANDSAT 5 TM、LANDSAT 7 ETM+、ASTER 感測器等,此類感測器所獲取熱影像之空間解 析度約為 60 m 至 120 m,相較於空載熱感測器而言,其空間解析度不佳,又因其拍攝易受雲 霧等外界環境影響,使得取得之熱輻射資訊與真實物體溫度有所差異。目前雖已發展大型載 具酬載熱感測器(如 ITRES SASI-600),以取得較佳空間解析度之熱影像,但其作業成本高且 機動性不佳。近年來 UAS 技術益趨成熟,其具機動性佳、低成本、安全、快速取像與即時回 覆特性,亦可依不同需求執行航拍規劃獲取資訊,且能於高風險之惡地環境下執行航拍取像 任務,並可於雲下拍攝,降低雲霧干擾。此外,亦可選擇不同飛行高度,以獲取較高空間解 析度之影像。雖 UAS 酬載熱像儀無法如衛載熱感測器可一次取得大範圍之熱影像資料,但以 其酬載熱像儀,可以較低飛行之高度,獲取更高空間解析度之熱影像與降低環境干擾,取得 較貼近地物之溫度資訊供後續研究使用。然而,以 UAS 酬載熱像儀獲取影像資料後,仍須定 位定向,才可進行後續處理取得三維分布的空間溫度資訊。熱影像定位定向可透過航測空中三角測量(簡稱空三)平差作業程序,於已知精確之熱像 儀相機參數,量測影像間之連結點(tie point)及控制點對應之影像的像點坐標,基於共線條件 式,以最小二乘法原理解算 UAS 航拍影像於物空間之成像位置與姿態(外方位參數),即光束 法空三平差。但由於熱成像之特性,導致熱控制點與一般航測標設計與佈設方式皆有所不同, 且佈設較不易,又控制測量皆需耗費大量勞力、時間及成本,若可減少地面控制點之需求, 將可使得熱影像之應用更為廣泛。以往可見光影像定位定向研究中,已有相當多研究將 GPS 觀測量引入光束法空三平差程序中,解決可見光學影像定位定向之問題,研究成果顯示可將 地面控制點需求降低(Friess, 1990;Ackermann, 1997;Bilker et al., 2000;Ruzgiene and Vainauskas, 2000;Skarlatos et al., 2013)。
三、 文獻探討
以單旋翼 UAS 酬載熱像儀,獲取熱影像資料執行定位定向,首先面臨熱像儀為非量測型 相機,欲以其執行定位定向,必須先對熱像儀率定,故第一小節回顧熱像儀率定之相關研究、 熱像儀率定標設計及率定方式。由於 GPS 輔助可見光影像光束法空三平差之研究已趨成熟, 故第二小節將回顧 GPS 輔助可見光影像定位定向之相關研究,而最後一小節則回顧 GPS 輔 助可見光影像光束法空三平差與地面控制點佈設關係之文獻,藉以了解後續熱影像地面控制 點佈設之方式。3.1. 熱像儀率定
目前普遍以近景攝影測量率定場法率定非量測型光學相機。熱像儀是紀錄物體熱輻射資 訊,其率定標須明顯地呈現於熱影像上,使標點易於影像上辨識,才可執行率定,因此須設 計具有溫度差異之率定標,以供熱像儀拍攝率定之。目前熱像儀普遍是以平面率定場方式率 定(那至中,2010;Miraliakbari et al., 2010;Luhmann et al., 2010;Lagüela et al., 2011; Hartmann et al., 2012) 。 Luhmann et al. (2010)所設計之熱率定標是根據不同金屬具有不同之放射率而設計,其中 鋁金屬之放射率最低。將鋁製率定板經由陽光照射後,可於影像上呈現黑色;Hartmann et al.(2012) 亦 是 沿 用 前 者 率 定 標 及 方 式 執 行 熱 像 儀 相 機 率 定 ; 那 至 中 (2010) 則 是 根 據 PhotoModeler 所設計之率定模板,依不同顏色具有不同之吸熱程度之特性,將其率定標以日 光均勻照射之,執行取像拍攝後,消除點模糊與增強對比,求得相機參數;而 Lagüela et al.(2011) 則以平面方式規則排列燈泡設計率定標,亦經由拍攝後求取相機參數;然而,以平面率定板 率定所得之相機參數,對於欲求熱影像共軛點景深方向之測定精度較差(Lagüela et al. , 2011), 故為解決此問題,因而衍生三維率定場,執行熱像儀率定。 Lagüela et al. (2011)即以三維率定場率定熱像儀,其設計之率定標,其所求之相機參數, 對於欲求得不同景深之地物點坐標較為合適,而其率定之焦距與廠商規格相近;而 Liao and Huang(2013)亦以三維率定場方式佈設鋁製率定標,其率定標改良 iWitnessPRO 所設計之率定 標,將其黑點部分改鋁製材質,以陽光均勻照射之,拍攝後求得相機參數;而 Hsu et al.(2013) 則亦改良 iWitnessPRO 所設計之率定標,以保麗板為底,將其黑點部分填以冰棉花,根據黑 5點溫度較低的特性,進而拍攝率定之。 然而,由非量測型變焦光學相機得知,於航拍取像與近景率定相機時之取像條件不同時, 使得近景率定之相機參數,無法描述相機於 UAS 航拍時之狀態。因此,本計畫擬以符合熱影 像特性之熱率定標,設計一野外率定場,使其率定之焦距與航拍取像之焦距近乎一致,克服 率定不完全所產生系統誤差之問題,以取得較精確之熱像儀相機參數。
3.2. GPS 輔助可見光影像定位定向
GPS 輔助光束法空三平差於理想上係期望 GPS 定位成果等同曝光瞬間相機透視中心,但 由於空間之限制,GPS 天線中心位置無法與相機透視中心位置重合。以往傳統大型載具,可 透過地面測量方式(如:自由測站法)求得 GPS 天線中心於像坐標系中的偏移量,再藉由與地 面坐標系之間旋轉矩陣,將此偏移量轉換至物空間坐標系;而 UAS 酬載相機透視中心無法 得知,致使無法利用地面測量之方式求得 GPS 天線中心於像坐標系中的偏移量。於 GPS 輔 助 UAS 可見光影像光束法空三平差文獻中,提及線性漂移參數可解決 GPS 天線偏移量、大 氣折光差、衛星軌道誤差、整數週波未定值不精確等問題(Blankenberg, 1992; Ackermann, 1994;Hinsken, 2002)。此外,Hinsken et al.(2002)則是透過漂移參數中之常數項補償 GPS 天 線至相機透視中心空間偏移量,即便此偏移量未知,亦可透過線性漂移參數將此偏移量所引 起的系統誤差之影響降到最低。李敏瑜(2013)以 GPS 輔助 UAS 可見光影像光束法空三平差研 究中,亦證實線性漂移參數之常數項可解決 GPS 天線偏移量之問題,但上述線性漂移參數是 基於定翼機探討,因定翼機飛行速度較快,曝光站間之 GPS 觀測量間具有線性相關性,可透 過時間關係,描述相鄰曝光站間之 GPS 觀測量,接續將 GPS 天線相位中心歸算於像片透視 中心,才可執行光束法空三平差。而本計畫以單旋翼 UAS 航拍取像,其飛行速度較慢且易 受陣風影響,致使將以不規則之飛行軌跡航拍取像,其曝光站間之 GPS 觀測量關係勢必非線 性相關,故本研究將基於聯合平差發展一數學模式解算 GPS 天線偏移量。 此外,GPS 定位時間與相機曝光瞬間存在一時間差,兩者時間並不一致;因此,即使擁 有精確 GPS 定位成果,仍須考量 GPS 天線至相機透視中心偏移量與時間延遲之問題。目前 普遍使用時間內插處理方式,皆以 GPS 接收儀記錄相機曝光瞬間時間,藉由 GPS 接收模組 所記錄之相機曝光瞬間時間及 GPS 定位所記錄之規則時間作時間內插。常見內插方式有:線 性內插(Friess, 1988;Ackermann, 1992;Blankenberg, 1992;Ebadi, 1997)、多項式(Lucas, 1987)、拉格朗日(Friess, 1992),其中以線性內插最為普遍,又僅 Ackermann 於研究中使用線 性內插時探討其接收頻率,因此本計畫採用多數研究所使用之線性內插方式。此外,亦有透 過 GPS 接收儀傳送精確 PPS(Pulse-Per-Second)訊號,以此訊號觸發相機拍攝影像,使影像拍 攝曝光時與規劃設計時相近,降低延遲量。然而此方法雖可降低時間延遲,但由於時間差距 仍大於 1 毫秒,因此仍無法免除時間內插程序(李敏瑜,2013)。3.3. GPS 輔助光束法空三平差與地面控制點之關係
傳統航拍可見光影像空三平差為求高精度之成果,一般而言必須於區域四周每隔兩條基 線佈設一平控點,而區域中央每隔四條基線佈設一高控點,以鏈鎖狀交叉方式均勻地佈設,故於測區周圍及內部必須佈設大量控制點。然而佈設控制點必須花費許多人力、金錢與時間, 當測區位於測量不易進行之區域,需花費更多金錢與時間;而熱影像之地面控制點佈設,須 根據其成像特性,所選用材質必須能清楚地於熱影像上呈現,相較於可見光影像之地面控制 點佈設需花費更多成本,於不易佈設控制點地區,更是困難。因此,以 GPS 觀測量作為大量 空中控制以輔助光束法空三平差,將可取代地面控制點,理想上可完全免除地面控制點之需 求,節省佈設地面控制點之時間與成本,進而提升效率。此外,於袁修孝專書(2001)提及以 GPS 輔助航拍可見光影像光束法空三平差,各曝光站之 GPS 觀測量三維坐標之可靠性是非常 均勻,其中高程可靠度高於平面可靠度,區域內部之可靠度高於區域兩端之可靠度。因此, GPS 觀測量之粗差易被發現,即使有粗差未被剔除,其對平差解算成果之影響相較於地面控 制點小,因此 GPS 輔助航拍可見光影像光束法空三平差往往具有較佳之可靠性,且明顯優於 傳 統 航 空攝 影測 量 之 光 束 法 空 三 平 差 ( 李德 仁 、 單杰 , 1989 ; Ackermann and Schade, 1993)。 理論上以 GPS 觀測量作為大量空中控制點來輔助空三平差,將可取代地面控制點,可完 全免除地面控制點之需求,但為使 GPS 定位成果應用於製圖所採用之坐標系統,仍需於空三 平差中引入少量控制點。已有許多研究顯示,GPS 輔助航拍可見光影像光束法空三平差時, 僅需於測區四個角落佈設全控點,已足夠供坐標轉換之用,但僅佈設四全控點其可靠度相當 差,僅能於地面控制點之 X、Y 及 Z 坐標觀測量粗差分別達 240 𝜎0、108 𝜎0、231 𝜎0,才能於 平差系統偵測出粗差。若未剔除地面控制點粗差,將會嚴重影響區域平差之精度,此時區域 平差精度將取決於地面控制點精度,故為避免地面控制點含有粗差且未被偵測出,必須量測 多次取平均以確定地面控制點觀測無粗差。此外,亦有提出於測區四個角落佈設雙全控點, 其實驗結果顯示,當控制點精度不佳或要求精度製圖時,可採雙全控點方式佈設於測區四個 角落,將可大幅提升精度(Ackermann and Schade, 1993; Bilker, 1998; 袁修孝,2001)。
四、 研究方法
本研究中 GPS 定位方式擬採用國土測繪中心所建置之 e-GNSS 即時定位服務,以 VBS-RTK GPS 定位技術獲取單旋翼 UAS 之飛行軌跡,故第一小節將介紹 e-GNSS 即時動態 定位基本架構與原理。 由於本研究所使用熱像儀為非量測相機,航拍前相機需事先率定。為避免因率定環境與 取像環境之焦距不同,造成相機參數無法完全描述航拍時之相機狀態,將於光束法空三平差 中造成像點系統誤差,故本計畫將採用野外率定場法執行率定,其所使用之率定數學模式及 率定流程將於第二小節中介紹;而後第三小節則介紹本研究所發展 GPS 輔助單旋翼 UAS 熱 影像光束法空三平差之數學模式。4.1. 虛擬基準站即時動態定位
本計畫欲使用 VBS-RTK GPS 即時定位技術,即內政部國土測繪中心所建置之 e-GNSS 服務(內政部國土測繪中心,2014),藉由 VBS-RTK GPS 即時定位技術可以提供飛行軌跡資 料,在成本方面甚至不需至地面控制點架設參考站,只需在 UAS 上搭載雙頻之 GPS 接收器, 7便可透過國土測繪中心所建置之 e-GNSS 服務,產生虛擬觀測量,再以 RTK 定位技術即時 求得 UAS 飛行移動軌跡,提供 UAS 航拍熱影像空三平差中之控制資訊。VBS-RTK GPS 即 時定位的特性與優點如下:
一、e-GNSS 的特性:
(一)採用網路傳輸技術”即時”結合多個基準站觀測資料,建構區域性定位誤差改正 模型,提供 RTK 使用者更準確、可靠的定位誤差修正資訊,有效擴展 RTK 的作業距離。 (二)採用行動式(Mobile)通訊技術取代傳統無線電數據機,傳輸 RTK 定位所需的定 位資訊。 (三)建置 24 小時連續觀測的固定式基準站,RTK 使用者不須自行架設主站,可大幅 節省作業時間、提升產能及降低作業成本等經濟效益。 (四)各基準站長期連續的觀測資料經過嚴密的基線計算及網形平差分析,可提升基準 站間之相對精度。二、e-GNSS 的優點:
(一)可擴大有效作業範圍,提高定位精度及可靠度。 (二)測量誤差及初始化時間不因距離增長而增加。 (三)使用者無須架設區域性主站。 (四)單人單機即可作業。 (五)可縮短作業時間,增加產能,降低作業成本。 (六)所有使用者皆在同一框架下進行即時定位。 (七)可提供全面性的定位成果品質監控。4.2. 相機率定數學模式
由於 UAS 酬載非量測相機,相機需事先率定。然而以近景方式率定相機,因物距非無 窮遠,無法描述取像時之相機參數,將造成系統性誤差(Lin and Chio, 2012),降低光束法平 差精度,故為克服不精確相機參數,致使空三平差成果不佳,本計畫將以野外率定場法執行 熱像儀率定,但仍須以近景方式於室內率定一組相機參數作為初始值,作為率定時初步粗差 偵錯,再引入此相機參數執行野外率定場法,以自率光束法率定熱像儀,故於本小節將介紹 相機率定數學模式。一、室內率定方式
相機參數率定之基本觀測方程式源自於共線式,見式 1。於共線式基礎上增加Δx、Δy 改正項(見式 1),並於平差過程一併解算,稱為附加參數自率光束法平差。而Δx、Δy 則是 依不同模式由不同參數所構成:𝑥𝑎− 𝑥0+ ∆𝑥 = −𝑓 �𝑚𝑚11(𝑋𝐴− 𝑋𝐿) + 𝑚12(𝑌𝐴− 𝑌𝐿) + 𝑚13(𝑍𝐴− 𝑍𝐿) 31(𝑋𝐴− 𝑋𝐿) + 𝑚32(𝑌𝐴− 𝑌𝐿) + 𝑚33(𝑍𝐴− 𝑍𝐿)� 𝑦𝑎− 𝑦0+ ∆𝑦 = −𝑓 �𝑚𝑚21(𝑋𝐴− 𝑋𝐿) + 𝑚22(𝑌𝐴− 𝑌𝐿) + 𝑚23(𝑍𝐴− 𝑍𝐿) 31(𝑋𝐴− 𝑋𝐿) + 𝑚32(𝑌𝐴− 𝑌𝐿) + 𝑚33(𝑍𝐴− 𝑍𝐿)� 式 1 𝑥𝑎, 𝑦𝑎 :像點之影像坐標 𝑥0, 𝑦0 :像主點之影像坐標 f :像主距 𝑋𝐿 , 𝑌𝐿 , 𝑍𝐿 :像片透視中心之物空間坐標 𝑋𝐴 , 𝑌𝐴 , 𝑍𝐴 :物點 A 之物空間坐標 𝑚𝑖𝑗 :旋轉矩陣元素,由姿態角所組成 以近景率定場法之率定軟體為 iWitnessPRO,該軟體同樣使用近景攝影測量方式自動率定 獲得相機參數。率定之數學模式為 Australis 模式,其數學模式修改 Brown 物理模式所得 (Beyer ,1992; Fraser, 1997),見式 2: ∆𝑥 , ∆𝑦 :像點改正量 ∆𝑥0, ∆𝑦0 :像主點偏移量改正量 x�, y� :以影像中心為原點之像坐標 r :像點的輻射距離 f, ∆f :像主距及改正量 K1, K2, K3, P1, P2, b1, b2 :相機畸變差改正參數 其率定原理是全自動匹配率定場影像上所佈設由 8 個黑點所組成的 20 個黑白的率定標, 再以式 1 與式 2 建立觀測方程式,以自率光束法平差解算相機參數,即像主距改正量∆f、像 主點改正量∆𝑥0, ∆𝑦0及輻射畸變差透鏡畸變差K1, K2, K3、離心畸變差P1, P2,非正交之畸變差 b1, b2。 ∆x = −∆x0−x�f ∆f + x�r2K1 + x�r4K2+ x�r6K3+ P1(r2+ 2x�2) + 2P2x�y� + b1x� + b2y�
∆y = −∆y0−y�f ∆f + y�r2K1+ y�r4K2+ y�r6K3+ 2P1x�y� + P2(r2+ 2y�2)
式 2
二、野外率定方式
為取得更精確之相機參數,欲使取像環境之焦距與率定環境之焦距近乎一致,故本研究 將以野外率定場法率定熱像儀。所使用之軟體為 ORIMA (ORIentation MAnagement),利用地 面控制點適當地配置,執行自率光束法空三平差後,將可獲得一組相機參數。而 ORIMA 自 率附加參數之數學模式同 Brown(1976)的模式,但參數之表達方式略有調整(Hinsken., 2008), 見式 3: ∆𝑥 = 𝑥0+ 𝑥[𝑎1(𝑟2− 𝑟02)2+ 𝑎2(𝑟4− 𝑟04) + 𝑎3(𝑟6− 𝑟06)] + 𝑏1𝑥 + 𝑏2𝑦 +𝑥𝑓[𝑐1(𝑥2− 𝑦2) + 𝑐2𝑥2𝑦2+ 𝑐3(𝑥4− 𝑦4)] +𝑑1𝑥𝑦 + 𝑑2𝑥2+ 𝑑3𝑥2𝑦 + 𝑑4𝑥𝑦2 + 𝑑5𝑥2𝑦2 ∆𝑦 = 𝑦0+ 𝑦[𝑎1(𝑟2− 𝑟02) + 𝑎2(𝑟4− 𝑟04) + 𝑎3(𝑟6− 𝑟06)] + 𝑦 𝑓[𝑐1(𝑥2− 𝑦2) + 𝑐2𝑥2𝑦2+ 𝑐3(𝑥4− 𝑦4)] +𝑑6𝑥 + 𝑑7𝑥2+ 𝑑8𝑥2𝑦 + 𝑑9𝑥𝑦2+ 𝑑10𝑥2𝑦2 式 3 ∆𝑥 , ∆𝑦 :像點改正量 ∆𝑥0, ∆𝑦0 :像主點偏移量改正量 f :像主距 a1, a2, a3, b1, b2, c1, c2, c3, 𝑑1, ⋯ , 𝑑10 :相機畸變差改正參數 其解算原理即以式 1 與式 3 建立觀測方程式,以自率光束法平差解算相機參數,即像 主距 f、像主點𝑥0, 𝑦0及輻射畸變差透鏡畸變差𝑎1, 𝑎2, 𝑎3、仿射及非正交𝑏1, 𝑏2,底片不平坦 𝑐1, 𝑐2, 𝑐3,底片變形及非輻射方向畸變差𝑑1, ⋯ , 𝑑10。
4.3. GPS 輔助單旋翼 UAS 熱影像空三平差模式
一、平差系統中之觀測方程式
本研究之觀測量分為四類:GPS 觀測量、GPS 天線偏移量觀測量、地面控制點觀測量及 像點觀測量。由於本研究所使用之單旋翼 UAS 飛行速度較慢,易受陣風影響,故曝光站間 勢必非為線性相關,以致線性漂移參數將不適用於對應的 GPS 觀測量解決 GPS 天線偏移量 之問題。而 GPS 天線偏移量,並不會隨著坐標系統改變而變化,理論上此距離應為定值,故 由 GPS 觀測量可組成 GPS 天線偏移量的觀測方程式(見式 4)。此外,亦以捲尺量測 GPS 天 線偏移量之距離,其觀測方程式表示如式 5。 𝑆=��𝑋𝐺𝑙 + 𝑣𝑋𝐺𝑙 − 𝑋𝐿𝑙�2+�𝑌𝐺𝑙 + 𝑣𝑌𝐺𝑙 − 𝑌𝐿𝑙�2+�𝑍𝐺𝑙 + 𝑣𝑍𝐺𝑙 − 𝑍𝐿𝑙�2 𝑙:第 𝑙 張像片 式 4𝑆0+ 𝑣 𝑆 = 𝑆 式 5 𝑆 :待求解之 GPS 天線偏移量 𝑆0 :GPS 天線偏移量之觀測量 𝑣𝑆 :GPS 天線偏移量之改正數 𝑋𝐿𝑙, 𝑌𝐿𝑙, 𝑍𝐿𝑙 :像片透視中心之三維坐標 𝑋𝐺𝑙, 𝑌𝐺𝑙, 𝑍𝐺𝑙 :GPS 天線中心之三維坐標 𝑣𝑋𝐺𝑙 ,𝑣𝑌𝐺𝑙 ,𝑣𝑍𝐺𝑙 :GPS 天線中心之三維坐標改正數 接續第三類觀測量為地面控制點觀測量,為避免施測地面控制點之精度不佳,降低平差 系統精度,故將地面控制點觀測量亦視為未知數求解,即將地面控制點視為虛擬觀測量,其 觀測方程式表示如式 6。 𝑋𝑗0+ 𝑣𝑥𝑗= 𝑋𝑗 𝑌𝑗0+ 𝑣𝑦𝑗 = 𝑌𝑗 𝑍𝑗0+ 𝑣𝑧𝑗 = 𝑍𝑗
j:第 j 個控制點 式 6 𝑋𝑗0, 𝑌 𝑗0, 𝑍𝑗0 :控制點坐標之觀測量 𝑋𝑗, 𝑌𝑗, 𝑍𝑗 :待求解之控制點坐標 𝑣𝑥𝑗, 𝑣𝑦𝑗, 𝑣𝑧𝑗 :控制點觀測量改正數 最後一類觀測量為像點觀測量,理論上每個像點與其對應物點物空間坐標及像片透視中 心,應位於同一光線上,故像點觀測方程式將符合共線條件式,其觀測方程式表示如式 7。 𝑥𝑖− 𝑥0+ ∆𝑥 = −𝑓 � 𝑚11�𝑋𝑖−𝑋𝐿𝑙� + 𝑚12�𝑌𝑖−𝑌𝐿𝑙� + 𝑚13(𝑍𝑖−𝑍𝐿𝑙) 𝑚31�𝑋𝑖−𝑋𝐿𝑙� + 𝑚32�𝑌𝑖−𝑌𝐿𝑙� + 𝑚33(𝑍𝑖−𝑍𝐿𝑙) � 𝑦𝑖 − 𝑦0+ ∆𝑦 = −𝑓 � 𝑚21�𝑋𝑖−𝑋𝐿𝑙� + 𝑚22�𝑌𝑖−𝑌𝐿𝑙� + 𝑚23(𝑍𝑖−𝑍𝐿𝑙) 𝑚31�𝑋𝑖−𝑋𝐿𝑙� + 𝑚32�𝑌𝑖−𝑌𝐿𝑙� + 𝑚33(𝑍𝑖−𝑍𝐿𝑙) � 式 7 𝑙:第 𝑙 張像片; 𝑖:第𝑖個物點 𝑥𝑖, 𝑦𝑖 :像點之影像坐標 𝑥0, 𝑦0 :像主點之影像坐標 f :像主距 𝑋𝐿𝑙, 𝑌𝐿𝑙, 𝑍𝐿𝑙 :像片透視中心之物空間坐標 𝑋𝑖 , 𝑌𝑖 , 𝑍𝑖 :物點𝑖 之物空間坐標 𝑚𝑖𝑗 :旋轉矩陣元素,由姿態角所組成 列出上述四類觀測方程式,將其線性化,給定未知數初始值,即可帶入聯合平差模式, 迭代同時求解 GPS 天線偏移量、像片外方位參數及連結點之物空間坐標。 11
二、聯合平差(Unified least squares adjustment)
於實際平差系統中之參數與觀測值可能來自大地測量、平面測量及攝影測量等不同領域, 為了能夠同時平差處理來源不同之參數,因而衍生了最小二乘聯合平差。此方法最重要假設 為條件方程式中包含之所有參數皆為觀測值,利用其協方差或權矩陣對不同觀測值賦予不同 權重,界定此觀測值於平差系統中的意義(Mikhail et al., 2001)。此模式一開始是由線性函數推 導,給定參數向量 𝒙、對應之先驗協因子矩陣為 𝑸𝒙𝒙 與改正數向量為 𝜟,接續給予一組 𝒍 為 n×1 觀測向量,對應 𝒍 觀測向量之先驗協因子矩陣為 Q,其方程式可統整為矩陣形式: �𝑨 𝟎𝟎 𝑰� �𝝂𝝂 𝒙� + � 𝑩−𝑰� 𝚫 = � 𝒇 𝒇𝒙� 或 式 8 𝑨̇𝒗̇ + 𝑩̇𝚫 = 𝒇̇ 式 9 其對應總協因子矩陣為: 𝑸̇ = 𝑨̇𝑸̇𝑨𝑻̇ = �𝑨̇𝑸̇𝑨𝑻̇ 𝟎 𝟎 𝑸𝒙𝒙� = �𝑸 𝒆 𝟎 𝟎 𝑸𝒙𝒙� 式 10 接續根據最小二乘法,得其解為: 𝜟 = 𝑵−𝟏̇ 𝒕̇ = (𝑵 + 𝑾𝒙𝒙)−𝟏(𝒕 − 𝑾 𝒙𝒙𝒇𝒙) 𝑵̇ = 𝑩𝑻̇ 𝑾̇ 𝑩̇ = [𝑩𝒆 𝑻𝑾 𝒆𝑩 + 𝑾𝒙𝒙] = (𝑵 + 𝑾𝒙𝒙) 式 11 𝒕̇ = 𝑩𝑻̇ 𝑾̇ 𝒇̇ = 𝑩𝒆 𝑻̇ 𝑾̇ 𝒇 − 𝑾𝒆 𝒙𝒙𝒇𝒙 = (𝒕 − 𝑾𝒙𝒙𝒇𝒙) 𝑩 :對未知參數偏微分之係數矩陣 𝜟 :未知參數向量 𝑨 :對觀測量偏微分之係數矩陣 𝝂 :觀測量改正數向量 𝑸 :觀測量之協因子矩陣 𝑸𝒙𝒙 :未知參數之協因子矩陣 𝑾 :觀測量之權矩陣 𝑾𝒙𝒙 :虛擬觀測量之權矩陣 𝒇 :觀測方程式之不符值 𝒇𝒙 :虛擬觀測方程式之不符值 本研究所發展之數學模式之多餘觀測數為 GPS 觀測量組成 GPS 天線偏移量之觀測方程 式個數及像點觀測量組成觀測方程式個數之總和與待求解之外方位參數及連結點物空間坐標 總和相減。其相關矩陣內容如下所示,其中 𝑨̇ 矩陣包含式 4 對 GPS 觀測量偏微分之係數(𝑨𝐺𝑃𝑆)、式 7 對像點觀測量偏微分之係數(𝑨𝑖𝑚_𝑝𝑜𝑖𝑛𝑡)、式 5 對 GPS 天線偏移量觀測量偏微分 之係數及式 6 對地面控制點虛擬觀測量偏微分之係數(𝑰),而 𝝂 矩陣包含由 GPS 觀測量之改 正數(𝒗𝐺𝑃𝑆)、像點觀測量之改正數(𝒗𝑖𝑚_𝑝𝑜𝑖𝑛𝑡)及 GPS 天線偏移量與地面控制點虛擬觀測量之 改正數(𝒗𝑥𝑥),而 𝑩̇ 矩陣則包含共線式對未知參數偏微分之係數矩陣(𝑩𝐸𝑂, 𝑩𝑆, 𝑩𝑐𝑝𝑇𝐼𝐸),而 𝜟 矩陣包含對應之未知參數增量,其中未知參數增量即外方位參數增量(𝒙𝐸𝑂)、GPS 天線偏移 量增量(𝒙𝑆)、地面控制點與連結點物空間坐標增量(𝒙𝑐𝑝𝑇𝐼𝐸)。而𝑾,𝑾𝒙𝒙,𝒇,𝒇𝒙矩陣定義皆 如上述所敘。 𝑨̇ = � 𝑨𝐺𝑃𝑆𝐼𝑀∗3𝐼𝑀 0 0 0 𝑨𝑖𝑚_𝑝𝑜𝑖𝑛𝑡2𝑛𝑜𝑜𝑏∗2𝑛𝑜𝑜𝑏 0 0 0 𝑰(6𝐼𝑀+1+3𝑐𝑝+3𝑇𝐼𝐸)∗(6𝐼𝑀+1+3𝑐𝑝+3𝑇𝐼𝐸) � 𝑩̇ = �𝑩𝐸𝑂(𝐼𝑀+2𝑛𝑜𝑜𝑏)∗6𝐼𝑀 𝑩𝑆(𝐼𝑀+2𝑛𝑜𝑜𝑏)∗1 𝑩𝑐𝑝𝑇𝐼𝐸(𝐼𝑀+2𝑛𝑜𝑜𝑏)∗(3𝑐𝑝+3𝑇𝐼𝐸) −𝑰(6𝐼𝑀+1+3𝑐𝑝+3𝑇𝐼𝐸)∗(6𝐼𝑀+1+3𝑐𝑝+3𝑇𝐼𝐸) � 𝒗̇ = � 𝒗𝐺𝑃𝑆3𝐼𝑀∗1 𝒗𝑖𝑚_𝑝𝑜𝑖𝑛𝑡2𝑛𝑜𝑜𝑏∗1 𝒗𝑥𝑥(6𝐼𝑀+1+3𝑐𝑝+3𝑇𝐼𝐸)∗1� ;𝜟 = � 𝒙𝐸𝑂6𝐼𝑀∗1 𝒙𝑆1∗1 𝒙𝑐𝑝𝑇𝐼𝐸(3𝑐𝑝+3𝑇𝐼𝐸)∗1�;𝒇̇ = � 𝒇𝒇𝒙�;𝒘̇ = � 𝒘 𝒘𝒙�
其中:IM 代表影像個數,noob 代表像點觀測量個數,cp 代表地面控制點個數,TIE 代 表地面連結點個數。
五、 結果與討論
5.1. 熱像儀率定
由於熱像儀為變焦鏡頭,其於室內率定之焦距與航拍取像環境時焦距並不相同,易產生 焦距率定不完全的情況發生,而造成像點系統性誤差。因此,本計畫設計一與航拍取像環境 一致之野外率定場,執行野外率定場法。但以野外率定場法執行熱像儀相機率定,需一組相 機參數作為初始值,故先以 iWitnessPRO 自動率定軟體,執行室內率定,獲取其相機參數後, 再使用 ORIMA 空中三角測量軟體執行自率光束法平差,取得一組較精確之熱像儀相機參數, 以提升後續光束法空三平差之精度。故本計畫熱像儀率定成果分為兩部分:室內率定及野外 率定。一、室內率定
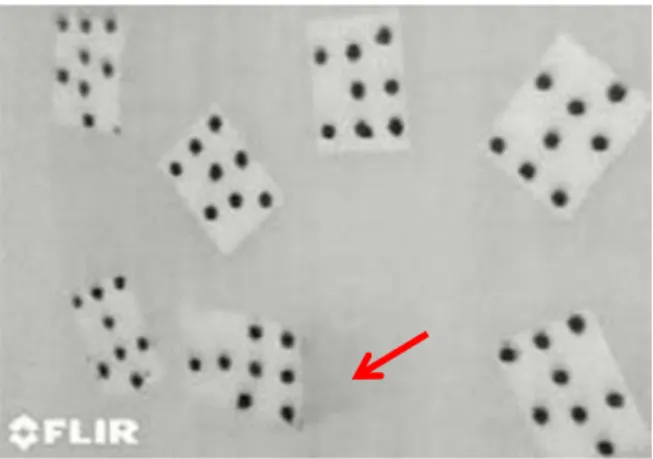
由於熱像儀像幅較小,於率定時,無法涵蓋 iWitnessPRO 率定軟體所設計之 20 個黑白率 定標,故隨機選取 10 個黑白率定標,將其放大 1.5 倍後,透過隔熱材料將每個圓點部分隔開, 並於圓點處挖空注入冰水,藉此在熱影像中呈現出 iWitness Pro 所需之率定標形狀,其拍攝 13成果如圖所示。率定場高差約為 20 公分(見圖 1 箭頭處)且均勻佈設,並以環拍之方式取像。
圖 1 熱像儀率定場現場佈標狀況
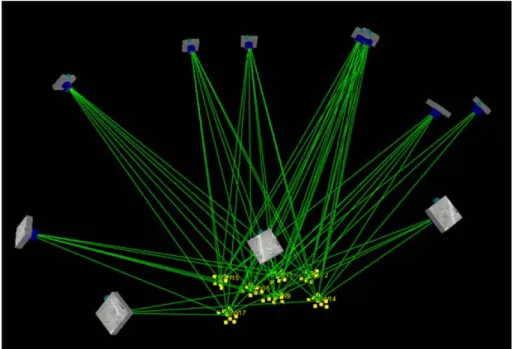
此拍攝取像之物距約莫 3 公尺,每一曝光站拍攝皆任意旋轉相機取像,共拍攝 12 張, 拍攝結果見圖 2,率定標與相機於物空間分布情況見圖 3。
圖 3 熱像儀率定時率定標與相機於物空間分布情況
由於影像畸變差主要影響量為輻射畸變差(Remondino and Fraser, 2006),故僅對焦距、 像主點偏移量及輻射畸變差執行幾何校正,其率定成果如表 1。 表 1 室內率定之熱像儀相機參數 焦距 18.3045mm 像主點 x0 偏移量 1.1973mm 像主點 y0 偏移量 -1.2814mm 輻射畸變差 K1 7.7054e-004 輻射畸變差 K2 5.8144e-006 輻射畸變差 K3 -3.5091e-008
二、野外率定
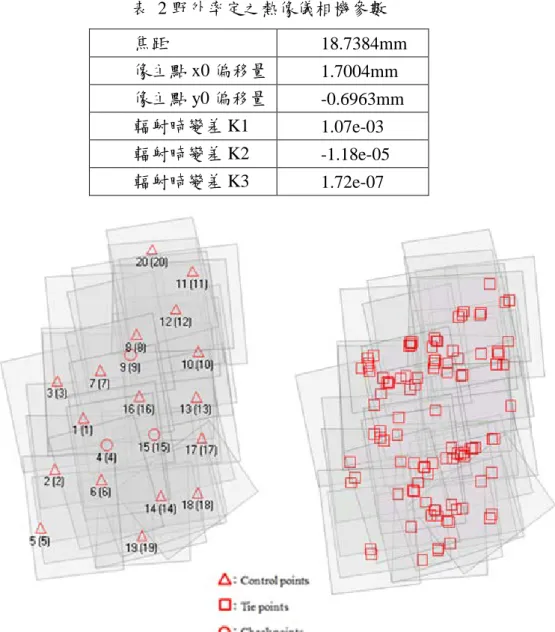
野外率定場之實驗區為政治大學體育館旁,此區物表起伏及涵蓋地物種類較為豐富,而 其實驗場範圍約為 100 m × 50 m,均勻佈設 20 個鋁質板(見圖 4),其中 17 個為控制點,3 個 為檢核點。率定場之航帶規劃為 4 條與航帶首尾各一條正交航帶,共 6 條航帶(圖 5),而影像 前後重疊率 80%,側向重疊率為 50%。據本次研究之熱像儀(FLIR Systems, 2013),其每個像 元尺寸為 25μm,焦距約為 18 mm。於率定場航拍取像時,航高設計 100 m,每個像元之地 面涵蓋範圍為 14cm × 14cm,控制點及檢核點實地佈設尺寸為 45cm × 45cm。 15圖 4 45cm × 45cm 方形鋁質板之可見光影像 圖 5 野外場率定場之航線規劃 以 ORIMA 自率光束法區域空三平差之附加參數模式包含:像主距、像主點、鏡頭透鏡 輻射畸變差透鏡畸變差、仿射及非正交,底片不平坦、底片變形及非輻射方向畸變差等參數, 但僅率定僅率定像主距、像主點、透鏡輻射畸變差輻射畸變差透鏡畸變差,求得一組相機參 數,其成果見表 2。野外率定場之控制點與檢核點皆以 GPS-RTK 施測而得,控制點、檢核點 及自動匹配連結分布情形見圖 6 及圖 7。
表 2 野外率定之熱像儀相機參數 焦距 18.7384mm 像主點 x0 偏移量 1.7004mm 像主點 y0 偏移量 -0.6963mm 輻射畸變差 K1 1.07e-03 輻射畸變差 K2 -1.18e-05 輻射畸變差 K3 1.72e-07 圖 6 野外率定場之控制點與檢 核點分布情形 圖 7 野外率定場地面連結點分布情 形
5.2. 模擬資料實驗
本研究以單航帶模擬資料驗證模式之可行性,單航帶模擬資料之航高設定為 100 m,焦 距則以近景率定之熱像儀焦距(18.3045mm)為模擬資料之焦距,故其地面涵蓋範圍約為 43 m × 32 m,地面取樣距離(Ground Sampling Distance ,GSD)約為 14 cm。於真實影像資料之航拍 規劃為前後重疊率(end lap)為 80%,故將以此重疊率進行航線規劃模擬。其坐標系是以測區 左下角為原點,此坐標系之 X 軸平行於航帶方向且向右為正方向,Y 軸垂直於 X 軸且向上為 正方向,而 Z 軸為 X、Y 軸構成之 XY 平面之法向量且向上為正方向,採右旋坐標系。模擬 時先配置連結點空間坐標與各像片外方位參數坐標,再依所需點位數量及地面涵蓋範圍,給定坐標值,帶入共線式,求得模擬像點坐標之真值,而此模擬之像點皆不包含系統誤差。而 地面連結點配置皆為 4×4 點位分布,即每張像片至少涵蓋 16 地面連結點,並於測區四角落布 設單全控點,共 16 張熱影像,其單航帶配置(見圖 8)。於實際接收 GPS 訊號時,可能有遺漏 情況發生,致使部分像片未有 GPS 觀測量(如圖 9),因所發展之模式僅需達最小解算之觀測 量個數仍可以本研究所發展之模式執行平差計算求得待求解之未知數,因此以下亦將於 16 張像片數組成之單航帶配置下,於測區四角落佈設單全控點,探討遺漏部分 GPS 觀測量於本 研究所發展 GPS 輔助單旋翼 UAS 熱影像單航帶空三平差之整體理論精度及外部精度,透過 上述之實驗並將驗證本研究所發展模式的可行性。 圖 8 未遺漏 GPS 觀測量 16 張像片組成一單航帶配置 圖 9 遺漏部分 GPS 觀測量之 16 張像片組成之單航帶配置 上述整體理論精度即由模擬資料經誤差傳播所推導出未知數之方差-協方差矩陣,取其 檢核點未知數坐標 X、Y、Z 三方向之變方平均值開根號表示之;而外部精度皆指檢核點均 方根誤差(Root Mean Square Error, RMSE),其檢核點坐標分量均方根誤差計算方式如式 12 至式 14,而平面位置均方根誤差之計算如式 15。 RMSE_X =
�
∑ (𝑋𝑖−𝑋𝑖) 2 𝑛 𝑖=1 𝑛 式 12RMSE_Y =
�
∑ (𝑌𝑖−𝑌𝑖) 2 𝑛 𝑖=1 𝑛 式 13 RMSE_Z =�
∑ (𝑍𝑖−𝑍𝑖) 2 𝑛 𝑖=1 𝑛 式 14 RMSE_XY = �(𝑅𝑀𝑆𝐸_𝑋)2+ (𝑅𝑀𝑆𝐸_𝑌)2 式 15 𝑋𝑖, 𝑌𝑖, 𝑍𝑖 :平差計算後所得檢核點坐標值 𝑋𝑖, 𝑌𝑖, 𝑍𝑖 :檢核點坐標值真值或直接測得檢核點坐標值 𝑛 :檢核點個數 RMSE_X :X 方向之均方根誤差 RMSE_Y :Y 方向之均方根誤差 RMSE_Z :Z 方向之均方根誤差 RMSE_XY :平面位置之均方根誤差 將單航帶配置模擬資料產生後,即可匯入所發展模式解算。影響此模式解算精度之相關 參數為 GPS 定位精度、GPS 天線偏移量之觀測精度、像點量測精度及地面控制點之施測精度。 由於 e-GNSS 於 X、Y 及 Z 三方向之理論定位精度約為 5 cm、5 cm、10 cm (王敏雄等人,2013), 又地面控制點施測精度於三方向理論值為 2 cm、2 cm、5 cm (中華空間資訊學會,2010)。因 自訂坐標系之 X 軸平行於航向,故 X、Y 及 Z 三方向之 GPS 天線偏移向量可假設為 30 cm, 即相對距離為 51.96 cm,並假設其觀測量為 53cm,用捲尺人為量測此段距離誤差為 2 cm; 像點量測精度則以匹配時之精度設定為(0.33pixels)。執行本研究所發展 GPS 輔助單旋翼 UAS 熱影像光束法空三平差解算時,相關觀測量權重之設定將依前述觀測量之精度設定。最後, 將所有模擬資料皆須加入隨機誤差,其設定表 3。 表 3 模擬資料之隨機誤差設定 像點 GPS 天線偏移量 0.33pixels = 8.33μm 2 cm GPS 觀測量 X 5 cm Y 5 cm Z 10cm 地面控制點 X 2 cm Y 2 cm Z 5 cm 19一、理論精度
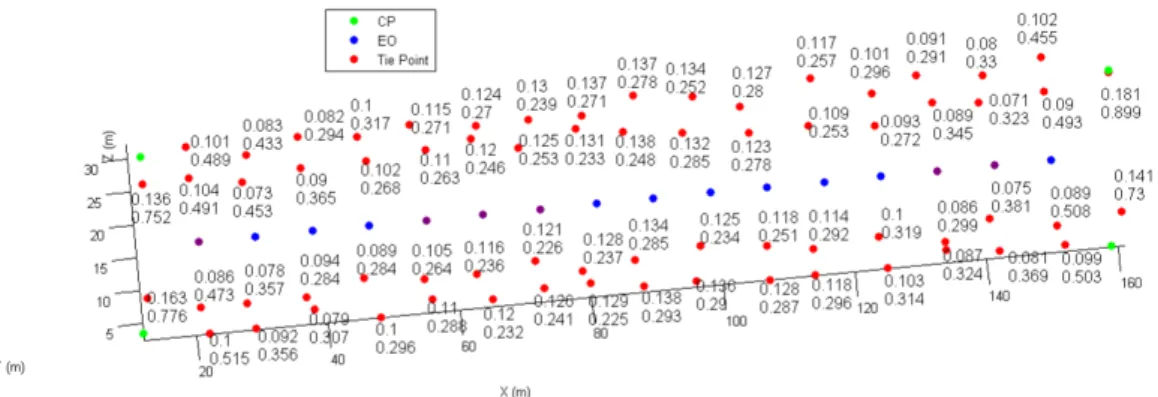
由表 4 與圖 10 可知,不論平面或高程精度,皆未受遺漏部分 GPS 觀測造成影響,故未 遺漏 GPS 觀測量仍有空中控制之作用。 表 4 遺漏部分與未遺漏 GPS 觀測量之 GPS 輔助單旋翼 UAS 熱影像單航帶光束法空三平差之 整體理論精度 像片數 16 方向 X Y Z 理論精度(m) 10 GPS 觀測量 0.08 0.08 0.37 16 GPS 觀測量 0.08 0.07 0.36 圖 10 遺漏部分與未遺漏 GPS 觀測量之 X、Y、Z 及平面整體理論精度之變化 由圖 11 至圖 13 可知,於 16 張像片數組成之單航帶,遺漏 GPS 觀測量與未遺漏部分 GPS 觀測量整體理論精度相當。由上試驗亦證實本研究於遺漏部分 GPS 觀測量所發展模式仍 能求解的優勢。 圖 11 未遺漏 GPS 觀測量輔助單航帶 16 張影像定位定向各檢核點位個別平面與高程理論精度 (數值由上至下依序為平面及高程)圖 12 遺漏 GPS 觀測量輔助單航帶 16 張影像定位定向各檢核點位個別平面與高程理論精度 (數值由上至下依序為平面及高程方向; :未有 GPS 觀測量之透視中心 ) 圖 13 遺漏 GPS 觀測量輔助單航帶 16 張影像定位定向各檢核點位於三方向之個別理論精度 (數值由上至下依序為 X、Y 及 Z 方向; :未有 GPS 觀測量之透視中心)
二、外部精度
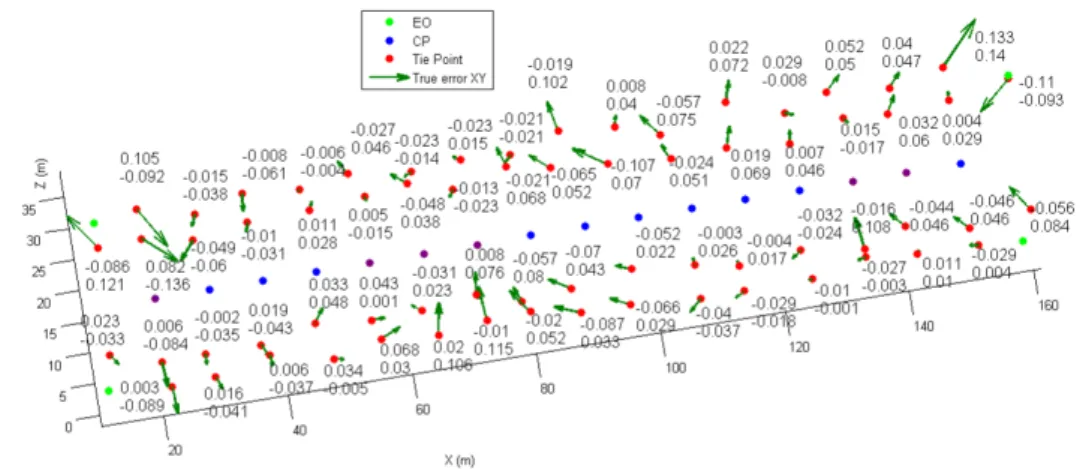
接續探討遺漏部分 GPS 觀測量與未遺漏 GPS 觀測量於測區四角落佈設單全控點於本研 究所發展 GPS 輔助旋翼型單航帶 UAS 熱影像空三平差之外部精度,由於抽樣三十次成果與 理論精度相符合,故將以一次抽樣分析之。由表 5 可知,遺漏部分 GPS 觀測量,仍可於合 理誤差範圍±2 cm 內,成功解算 GPS 天線偏移量(S)。而於平面與高程精度並無明顯變化,與 整體理論精度成果一致。 表 5 遺漏部分與未遺漏 GPS 觀測量輔助單旋翼 UAS 熱像單航帶光束法空三平差之外部精度 配置 16 images+ 10 GPS 16 images+ 16 GPS 方向 X Y Z X Y Z RMSE(m) 0.06 0.06 0.39 0.08 0.09 0.41 S(cm) 53.09 52.90 由圖 14 及圖 15 則可知,各連結點點位平面與高程較差皆受遺漏部分 GPS 觀測量所 影響,但高程較差較為明顯,愈靠近遺漏 GPS 觀測量之透視中心之點位,明顯有較大之較差, 受遺漏 GPS 觀測量影響甚大。 21圖 14 遺漏部分 GPS 觀測量之 GPS 輔助單旋翼 UAS 熱影像單航帶光束法空三平差各檢核點 位之平面較差分布圖 (數值由上至下依序為 X 及 Y 方向; :未有 GPS 觀測量之透視中心) 圖 15 遺漏部分 GPS 觀測量之 GPS 輔助單旋翼 UAS 熱影像單航帶光束法空三平差各檢核點 位之高程較差分布圖 ( :未有 GPS 觀測量之透視中心)
5.3. 單航帶真實資料實驗
一、單航帶真實資料實驗配置
單航帶真實資料之測區原規劃為政治大學校區內之指南溪,由於受限 e-GNSS 接收品質 不佳,僅能取得部分指南溪(圖 16)之真實資料,測區內控制點皆以國土測繪中心 e-GNSS 施 測,其控制標材質為方形鋁製標(如圖 4)。獲取真實資料之相關設定可參考表 6。 圖 16 單航帶測區(指南溪) 表 6 獲取真實資料之相關設定 航高 150 m 航線 1 像片總數 6 張 涵蓋面積 3000 m2 前後及左右重疊 80% GSD(焦距=18.3045mm) 18cm 控制標大小 60 cm * 60 cm 為符合單旋翼 UAS 重心配置,熱像儀機身需旋轉 90 度放置,即以 240 × 320 之像幅取 像,故航高為 100 m,每張熱影像之地面涵蓋範圍為 32.34 m × 43.12 m,但單航帶測區中因 指南溪兩側河堤距離約為 40 m,控制點僅能於河堤兩岸上佈設,故若以航高 100 m 航拍取像, 將無法涵蓋河堤兩岸,故規劃單航帶測區之航高為 150 m。二、真實資料獲取與前處理
航拍熱影像獲取方式 由於本研究使用之熱像儀,其像幅可涵蓋地面範圍較可見光影像小,且所獲取之影像右 側皆有溫標資訊,致使欲獲得較高重疊率之影像,必須密集地拍攝取像。但熱像儀拍攝與儲 23存時間間隔至少三秒以上,故不同航高之航拍計畫,UAS 飛行速度將有所不同,以航高 150 m 與前後重疊率為 80%為例,其曝光站間距為 13m,為確保熱像儀取像成功,必須使其拍攝 與儲存時間總和達 4 秒以上,故飛機飛行速度必須為 3 m/s,但以此飛行速度航拍取像,將易 受陣風影響,導致所獲取之影像將有重疊率不足之情況發生,故為取得足夠重疊率之熱影像, 本研究將以熱像儀外接訊號線至錄影卡,以飛行速度為 10 m/s,每秒紀錄 30 幅影像之錄影方 式獲取熱影像。 e-GNSS 觀測量之取得 當 GPS 訊號且無線電與網路設備訊號良好時,e-GNSS 即時解算可得固定解,其理論定 位精度 2-5cm 範圍內,但由於本研究 GPS 天線安裝於機身左側(見圖 17),可能受到電磁波干 擾,又取像時間為中午 12 點至下午 3 點,此時通過台灣上空之衛星顆數較少,故於航拍取得 真 實 資 料 時 , 所 得 之 即 時 解 算 GPS 資 料 定 位 品 質 不 佳 , 大 多 為 廣 域 差 分 增 強 系 統 (Satellite-based augmentation systems, SBAS),亦有少數 Differential GPS (DGPS)及 RTK 之定 位品質。以本研究使用之 Trimble BD970 接收模組其 SBAS 定位精度約 0.5~0.85m,DGPS 之 定位精度約 0.25~0.5 m,而 RTK 定位精度約 0.002 m (Trimble,2014)。本研究為對應以每秒 30 像幅之錄影方式,GPS 觀測量接收頻率為 20 Hz。不論 GPS 定位品質優劣,皆須以時間內 插取得 GPS 觀測量,本研究將以線性內插方式取得對應像片之 GPS 觀測量。 圖 17 本實驗建置之單旋翼 UAS 系統 熱影像處理
獲取真實資料執行熱影像定位定向時,是由錄影機卡錄影獲取熱影像,故須由錄影檔資 訊中擷取所需之熱影像。然而,錄影模式之限制,使得所截出之熱影像(704 × 480 pixels)不 為原始像幅(320 × 240 pixels)且影像向上偏移 8 pixels(圖 18 藍色框),故須將截出之影像重 新取樣至原像幅大小(見圖 18 右圖)。此外,熱影像硬體的限制,使其於影像上之左側有溫 標顯示(見圖 18 左圖紅色框),此溫標為明顯特徵,易使後續自動匹配連結點時產生錯誤之 成果,故須予以剔除,接續將影像匯入 LPS 空三軟體,執行標準化互相關(Normalized Cross Correlation, NCC)匹配連結點,其匹配相關係數設定為 0.6,搜尋罩窗大小為 7 × 7。連結點 自動匹配完成後,以人工方法剔除錯誤點位,將像點資料經輻射畸變差改正後,匯入本研究 所發展的 GPS 輔助單旋翼 UAS 熱影像光束法空三平差之數字學模式中進行分析。 704 × 480 pixels 320 × 240 pixels 圖 17 錄影取得之真實熱影像資料(左)及經處理之熱影像資料(右)
三、單航帶真實資料實驗成果與分析
真實資料實驗成果與分析將比較有無 GPS 觀測量輔助單旋翼 UAS 熱影像光束法空三平 差之外部精度,其中無 GPS 觀測量輔助光束法空三平差,將使用 LPS 執行;而有 GPS 觀測 量輔助光束法空三平差,則使用本研究所發展之數學模式執行,兩者使用之相機參數及連結 點位分布及個數皆相同。由 e-GNSS 即時定位品質之精度為依據,以加權平均方式約略估計 X、Y 及 Z 三方向之定位精度為 0.5 m、0.5 m、1 m;地面控制點施測方式皆以 e-GNSS 即時 動態定位技術測得,其定位理論精度 X、Y 約為 2 cm,而高程 Z 精度約為 5cm;而 GPS 天線 偏移量之實際量測值為 42cm,以捲尺人為量測此段距離誤差為 2 cm;像點量測方式有人工 量測及自動匹配而得,故以匹配精度(0.33 pixels)與人工量測精度(1 pixels)之平均(0.66 pixels) 作為像點量測精度之設定。真實資料之相關參數設定,見表 7: 表 7 真實資料之相關參數設定 解算方式 LPS 所發展數學模式 有無 GPS 觀測量輔助 無 有 e-GNSS 於 X、Y 及 Z 定位精度 50 cm、50 cm、1m GCPs 於 X、Y 及 Z 精度 2 cm、2cm、5cm 像點量測精度 0.66 pixels 25單航帶 6 張影像匯入 LPS 執行連結點匹配,由於熱影像空間解析度較差,且影像上邊緣 線特徵模糊不清,而地物又缺乏明顯特徵物,不易自動正確匹配連結點。自動匹配成果經人 工除錯與人工加量連結點後,共得連結點個數僅 53 個,其於各影像上連結點分布情形見圖 19。 圖 18 單航帶中各影像之連結點分布狀況 由於單航帶測區為河道,地控點僅能於河岸兩側佈設,不易於重疊區佈設控制點,故以 測區四角落佈設單全控點配置,探討有無 GPS 輔助光束法空三平差之外部精度。因檢核點不 易實地量測,僅用 3 個檢核點探討。因於此配置下,LPS 無法解算,故表 8 僅列所發展之數 學模式解算成果,表中包含有無 GPS 天線偏移量觀測量加入解算的兩者成果。由表 8 得知, 有 GPS 天線偏移量觀測量加入解算時,由於熱影像之基線航高比較小,致使其高程精度解算 成果較差,但由於本研究 GPS 觀測量精度不佳,使其平面精度(0.4m)及高程精度(1.27m)無法 達到預期成果,但此精度已可達監測之用。此外,無 GPS 輔助光束法空三平差時,將無法解 算,由此可知,即使 GPS 觀測量品質不佳,亦仍有空中控制之作用;於 GPS 天線偏移量之 解算成果得知,當所發展模式中引入 GPS 天線偏移量觀測量時解算成果幾乎等同於實際觀測 量,故於 GPS 觀測精度不佳時,無法成功求得正確之 GPS 天線偏移量,但受 GPS 天線偏移 量觀測量影響,使其解算成果皆接近於 42 cm。此外,若無 GPS 天線偏移量觀測量引入模式 解算時,會解算出錯誤甚巨之 GPS 天線偏移量 30.58m(見表 8),且其外部精度也變更差。 表 8 GPS 輔助單旋翼 UAS 熱影像單航帶光束法空三平差之成果 解算方式 所發展數學模式(GPS) 有無 GPS 天線偏移量觀測量 有 無 外部精度(m) X 0.32 1.25 Y 0.24 0.11 平面 0.40 1.25 Z 1.27 1.45 S(m) 0.42 30.58 然而,由於單航帶測區中間部分,其連結性較弱(見圖 20),亦為 LPS 無法解算成果因素
之一,若於中間部分增加一控制點(如圖藍色框),雖可解算,但平面精度高達 1.5 m,而高程 精度更高達 10 m。 圖 20 單航帶四角落佈設單全控點之地面連結點、檢核點及控制點分布情形 圖 21 則是將本研究使用未遺漏 GPS 輔助單旋翼 UAS 熱影像單航帶光束法空三平差定位 定向後之成果配合該區空載光達測量所產生的 1m 數值高程模型產製之正射熱影像展圖於 Google Earth 中之成果。 圖 21 單航帶正射熱影像 27
六、 結論與建議
6.1 結論
本章將根據前述實驗,針對熱像儀率定、VBS-RTK GPS 即時動態定位方式輔助單旋翼 UAS 熱影像空三平差之可行性、所發展模式於 GPS 輔助單旋翼 UAS 熱影像空三平差解算 GPS 天線偏移量之可行性,提出結論與建議。 (一) 熱像儀相機率定 以往非量測型相機率定皆採近景攝影方式率定,但以此方式率定將產生相機率定不完全 之情況發生,嚴重影響高程精度。以野外率定場法,使其航拍取像與率定環境之焦距近 乎一致,確實可大幅提升高程方向之精度。 (二) VBS-RTK GPS 以 VBS-RTK GPS 輔助 UAS 熱影像光束法空三平差時,作為空中控制,以減少地面控制 點之成果優劣取決於 GPS 定位品質好壞。於高速移動之載具,仍受 GPS 訊號接收狀況、 無線電與網路之傳輸及電磁波干擾等因素,使得 GPS 定位成果不佳,故本研究試驗以 VBS-RTK GPS 輔助單旋翼 UAS 熱影像光束法空三平差,仍無法作為高精確之空中控制, 但此定位精度已足夠應用於環境監測領域。 (三) GPS 天線偏移量 於單航帶 16 張前後重疊 80%影像模擬資料中 GPS 觀測精度佳且有 GPS 天線偏移量觀測 量時,所發展之數學模式可於合理範圍成功解算 GPS 天線偏移量,故驗證此模式確實可 解決 GPS 相位中心與像片透視中心不一致之問題;若於單航帶實際資料實驗中,所發展 之模式解算時,GPS 觀測精度不佳,不僅影響 GPS 天線偏移量之解算成果,此時空三精 度將取決地面控制點配置,因其地面控制點較少及影像間連結性不足,故使其解算成果 不佳,且解算出 GPS 之天線偏移量甚不合理。 (四) 所發展之數學模式 GPS 輔助單旋翼 UAS 熱影像光束法空三平差,以本研究所發展之數學模式解算時,即使 GPS 定位精定不佳,GPS 觀測量仍可作為空中控制,解算之空三精度仍優於未以 GPS 輔 助之。此外,於模你資料中亦證實即使遺漏部分 GPS 觀測量,於最小解算條件下,仍可 以本研究所發展之數學模式解算。6.2 建議
(一) 由於 GPS 即時定位成果不佳,影響其定位品質因素甚多,如 GPS 天線位置、電磁 波干擾、傳輸訊號及 GPS 觀測量觀測時間等,致使後續模式解算精度不佳,故未來建議 以後處理方式,以取得較佳之 GPS 定位成果,輔助 UAS 熱影像光束法空三平差,提升 空三平差精度,期許未來可擴大其應用領域。 (二) 由於本研究所使用之單旋翼 UAS,其抗風性較差,易受陣風影響,又其硬體未設計 完善,使其仍有搖尾之情況發生,導致取得之影像易有晃動之情形,故即使以每秒 30 像 幅之錄影方式取得影像,仍不易取得穩定性較佳之熱影像。故建議使用穩定性較佳之多 旋翼 UAS,以取得穩定性較佳之熱影像。此外,本研究設定其飛行速度為 10 m/s,若改 以 20 m/s 飛行,應可提升其飛行取像之穩定性。 (三) 本研究尚未對 GPS 觀測量及地面控制點進行可靠度分析,建議未來可針對可靠度探 討,探討其與 GPS 輔助可見光影像光束法平差之可靠度是否相符,且可提出精度高且可 靠度佳之最適地面控制點配置。 (四) 本研究未對熱影像之溫度資訊執行輻射改正,皆以相對溫度呈現。若能以真實溫度 呈現,將可獲得較精確之溫度資訊,以利後續應用。 (五) 本研究雖已產製正射鑲嵌熱影像,但區域甚小,建議後續進行大區域實驗以供大範 圍環境熱效應之監測使用。
參考文獻
王敏雄、劉至忠、劉正倫、蕭輔導,2006,「e-GPS 衛星基準網之 VBS-RTK 即時動態定位系 統測量成果分析」,國土測繪中心測試報告。 中華空間資訊學會,2010,「探討及分析現行 GPS 技術(靜態、RTK、e-GPS 等)之作業方式」 成果報告書。 李德仁、單杰,1989,「利用導航資料的光線束法區域網平差的品質分析」,『測繪學報』,18(1): 129-136。 李敏瑜,2012,「 」,國立政治大學地政學系研究所碩士論文:台北。 那至中,2010,「面陣列熱影像特性之研究」,國立政治大學地政學系研究所碩士論文:台北。 袁修孝,2001,『GPS 輔助空中三角測量原理及應用』,北京:測繪出版社。Ackermann, F.E. 1992, “Operational Rules and Accuracy Models for GPS Aerial Triangulation”, International Archives of Photogrammetry and Remote Sensing, 29(B3): 691-700.
Ackermann, F.E. 1994, “On the status and accuracy performance of GPS photogrammetry”,
Ackermann, F., 1997, “GPS for Photogrammetry”, International Society forPhotogrammetry and Remote Sensing, 56(4): 387-406.
Ackermann, F. and Schade, H., 1993, “ Application of GPS for Aerial Triangulation ” , Photogrammetric Engineering & Remote Sensing, 59(1):1625-1632.
Avery, T. E., and Berlin, G. L., 1992, Fundamentals of remote sensing and airphoto interpretation, Macmillan Publishing Company, New York, USA.
Beyer, H. A., 1992, Geometric and radiometric analysis of a CCD-camera based photogrammetric
close-range system, Doctoral dissertation, Diss. Techn.Wiss.ETH Zürich, Nr. 9701, 1992. Ref.: A.
Grün;Korref.: H. Tiziani.
Bilker, M., Honkavaara, E. and Jaakkola, J., 1998, “GPS supported aerial triangulation using untargeted ground control”, International Archives of Photogrammetry and Remote Sensing, 32(3): pp. 2-9.
Blankenberg, L. E., 1992, “GPS supported aerial triangulation - state of the art”, Photogrammetry Journal of Finland, 13(1): 4-16.
Brown, D.C. ,1976,“ The Bundle Adjustment: Progress and Prospects”,International Archive of Photogrammetry, Helsinki, Finland.
Colwell, R.N., 1983, Manual of Remote Sensing, 2nd ed .Am.SOC. of photogrammetry and Remote Sensing.
Ebadi, H., 1997, A Comprehensive study on GPS Assisted Aerial Triangulation, PhD Dissertation, Dept. of Geometrics’ Engineering. ,The University of CALGARY,Alberta, Canada.
Erdas Inc., 2008, “LPS Project Manager Use’s Guide”, Norcross, Georgia. Erdas Inc.
Faux, R. N., Maus P. and Lachowski H., Christian E. T., Matthew S. B., 2001, New approaches for monitoring stream temperature:Airborne thermal infrared remote sensing. Report Prepared for: Inventory & Monitoring Steering Committee Bob Simonson San Dimas Technology & Development Center 444 East Bonita Avenue, San Dimas, CA.
Friess, P., 1990, “Kinematic GPS Positioning for Aerial Photogrammetry Empirical Results”, International Symposium on Precise Positioning with theGlobal Positioning System, 3(7):1169-1184.
Friess, P., 1988, “Empirical accuracy of positions computed from airborne GPS data”, International Archives of Photogrammetry and Remote Sensing, 27(B3):215-234.
Hartmann, W., Tilch, S., Eisenbeiss, H., Schindler, K., 2012,“Determination of the UAV position by automatic processing of thermal images”, Switzerland.
Ham Y. and Fard .M.G. , 2012,“An automated vision-based method for rapid 3D energy performance modeling of existing buildings using thermal and digital imagery”, Advanced Engineering Informatics, 27(3):395–409.
Hinsken, L. U. D. G. E. R., Miller, S., Tempelmann, U., Uebbing, R. and Walker, A. S. 2002, “Triangulation of the LH Systems’ ADS40 using ORIMA GPS/IMU”, International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 34(3A): 156-162.
Hinsken, L., 2008, “CAP-A – Combined Adjustment Program Aerial Version”, Norcross, Georgia Erdas Inc.
Hsu, L.Y., Chen C. Y., Chio, S.H., 2013,“The study on position and orientation of close-range thermal infrared images”, Proceedings of International Symposium on Remote Sensing, Tokyo, Japan, May 15-17.
James, M. R., Robson, S., Pinkerton, H., Ball, M., 2006,“Oblique photogrammetry with visible and thermal images of active lava flows”, Bulletin of volcanology, 69(1):105-108.
Kremer, J., 2009, “ Optimized data acquisition with the IGIDigiTHERM Thermal Camera System”, Photogrammetric week, Stuttgart Germany.
Lagüela, S., González-Jorge, H., Armesto, J., Arias, P., 2011, Calibration and verification ofthermographic cameras for geometric measurements. Infrared Phys. Technol. 2011(54): 92-99.
Liao, C. L., and Huang, H. H., 2013, “Study on Using Thermal Image to Produce Digital Surface Temperature Model”, Proceedings of International Symposium on Remote Sensing, Tokyo, Japan, May 15-17.
Luhmann, T., Ohm, J., Piechel, J., Roelfs, T.,“Geometric Calibration of Thermographic Cameras”, In : Proceedings of the ISPRS Commission V Mid-Term Symposium on Close Range Image Measurement Techniques, Newcastle upon Tyne, UK, 21–24 June 2010; Volume 38, Part 5, pp. 411-416.
Lucas, J. R., 1987, “Aerotriangulation Without Ground Control”,Photogrammetric Engineering and
Remote Sensing, 53(3): 311-314.
Lin J.Y. and Chio, S.H., 2012, “ The Accuracy Influence of Different Camera Calibration Conditions to Bundle Adjustment of Close Range Images”,Proceedings of The 33nd Asian Conference on Remote Sensing , Pattaya, Thailand, November 26-30.
Mikhail, E. M., Bethel, J.S., McGlone, C.J., 2001, Introduction to Modern Photogrammetry, USA:John Wiley & Sons Inc.
Miraliakbari, A., Hahn, M., Arefi, H., Engels, J., 2010,“Development of a low–cost sensor system for use on gyrocopters”, International Society of Photogrammetry and Remote Sensing, Commission I, Calgay- Canada 2010.
Remondino, F., and Fraser, C., 2006, “Digital Camera Calibration Methods:Considerations and Comparisons”, ISPRS Commission V Symposium,Dresden, Germany, September 25-27.
Ruzgiene, B. and Vainauskas, V., 2000,“Investigation of aerial triangulation applying surface deformation theory”, International Society of Photogrammetry and Remote Sensing, 33(B4): 879-882.
Skarlatos, D., Procopiou, E., Stavrou, G., Gregoriou, M., 2013,“ Accuracy assessment of minimum control points for UAV photography and georeferencing” , Proceedings of International Conference on Remote Sensing and Geoinformation of Environment, Paphos, Italy, April 8-10. Tronin, A.A., 2000,“Thermal IR satellite sensor data application for earthquake research in
China”, International Journal of Remote Sensing, 21(16): 3169-3177.
Wolf, P. R. and Dewitt B. A., 2000, Elements of Photogrammetry: with Applications in GIS, 3rd edition, U.S.A.: The McGraw-Hill Book Co.
網頁參考文獻
FLIR Systems (2013).Infrared Imaging Systems, Retrieved February 19, 2013 from FLIR Systems on the World Wide Web: http://www.FLIR.com
Trimble ( 2014). Trimble BD-970 datasheet, Retrieved Jane 10,2014 from Trimble BD-970 datasheet on the World Wide Web:
http://x9gps.com/bin/TrimbleBD970DataSheet.pdf
國土測繪中心,2014,e-GPS 即時動態系統入口網站,取用日期:2010 年 5 月 7 日, http://www.egps.nlsc.gov.tw
國科會補助專題研究計畫成果報告自評表
請就研究內容與原計畫相符程度、達成預期目標情況、研究成果之學術或應用價
值(簡要敘述成果所代表之意義、價值、影響或進一步發展之可能性)
、是否適
合在學術期刊發表或申請專利、主要發現或其他有關價值等,作一綜合評估。
1. 請就研究內容與原計畫相符程度、達成預期目標情況作一綜合評估
□
達成目標
■ 未達成目標(請說明,以 100 字為限)
□
實驗失敗
□
因故實驗中斷
□
其他原因
說明:
本計畫預期完成之工作項目,分述如下。 蒐集資料與文獻 熱像儀率定 熱控制標設計 試驗區UAVS 熱像儀航拍獲取試驗區熱影像,以及進行地面控制標測量 發展熱影像點特徵萃取與匹配演算法 以GPS輔助熱影像定位定向精度與成果分析 撰寫研究成果報告 發表研討會論文或期刊論文 1 篇 上述工作項目僅熱影像點特徵萃取與匹配演算法因參與計畫博士生於計畫末期個人因素,致 使所發展演算法並未進一步分析,未列在成果報告書中;以及由於 GPS 即時定位成果不佳, 致使後續模式解算精度不佳之外,其餘工作項目均順利完成!2. 研究成果在學術期刊發表或申請專利等情形:
論文:□已發表 □未發表之文稿 ▉撰寫中 □無
專利:□已獲得 □申請中 □無
技轉:□已技轉 □洽談中 □無
其他:
(以 100 字為限)
已撰寫”GPS-Supported Bundle Adjustment for Aerial Triangulation of VTOL UAV Images” 文章,預計於近期內校稿後投稿 ISPRS Journal of Photogrammetry and Remote
3. 請依學術成就、技術創新、社會影響等方面,評估研究成果之學術或應用價
值(簡要敘述成果所代表之意義、價值、影響或進一步發展之可能性)(以 500
字為限)
本研究於 UAS 上加裝 Trimble BD970 GNSS OEM 接收模組,以 VBS-RTK (Virtual Base Station -Real Time Kinematic, VBS-RTK) GPS 定位技術,將 GPS 觀測資訊作為空中控制使用。並發展 一數學模式,解決 GPS 天線中心偏移量的問題以及以野外率定場法,執行熱像儀率定,取得 較精確之相機參數,供後續空中三角測量平差使用。研究成果顯示以本研究發展之模式可行 且 VBS-RTK GPS 輔助 UAS 熱影像光束法空三平差時,作為空中控制,確實可以減少地面控 制點,成果優劣取決於 GPS 定位品質好壞。於高速移動之載具,仍受 GPS 訊號接收狀況、無 線電與網路之傳輸及電磁波干擾等因素,使得 GPS 定位成果不佳,故本研究試驗以 VBS-RTK GPS 輔助單旋翼 UAS 熱影像光束法空三平差,仍無法作為高精確之空中控制,但此定位精度 已足夠應用於環境監測領域。 於學術成就:培養一位碩士生、完成一篇碩士論文;投稿兩篇研討會論文、正整理一篇文章 投稿 SCI 期刊。 於技術創新:發展一新的模式執行 GPS 輔助光束法空三平差 於社會影響:UAS 酬載熱像可製作熱正射影像供環境監測使用等方面, 未來建議以後處理方式,以取得較佳之 GPS 定位成果,輔助 UAS 熱影像光束法空三平差, 提升空三平差精度,期許未來可擴大其應用領域;對熱影像之溫度資訊執行輻射改正,以真 實溫度呈現,獲得較精確之溫度資訊,以利後續應用;進行大區域實驗以供大範圍環境熱效 應之監測使用。