應用機器視覺的養殖池魚類
自動計量分析系統
林享曇
1,張嘉孟
2,方
煒
3,朱元南
4 1. 國立台灣大學生物產業機電工程學系碩士 2. 國立台灣大學生物產業機電工程學系博士候選人 3. 國立台灣大學生物產業機電工程學系教授 4. 國立台灣大學生物產業機電工程學系教授,本文通訊作者摘
要
養殖過 程中需要隨 時掌握魚群 的存活率和 成長資訊才 能有效管理 。現有技 術 還不能以低 人力、低干 擾方式作全 面性的計量 ,因此本研 究應用機器 視覺,開 發 影像收集和 自動化處理 技術,對於 解決魚群計 量的需求提 出一個可行 的方案。 本 研究的創新 之處在針對 水道式養殖 系統的特性 ,研發活動 式的水中取 像平台, 可 以由單人操 作,在魚不 離水的情形 下完成低重 疊性影像的 攝影取像, 並開發連 續 性影像的處 理軟體,可 運用電腦接 收影像記錄 ,完成自動 化的計量和 重量分析 。 本研究開發 魚類計量分 析系統(Fish Counting and Analysis System, FCAS)軟體,將魚 體俯視影像 經平滑化、 二元化、斷 開及閉合運 算處理,利 用偵測線技 術區分重 複 出現的魚隻 影像,即可 記錄魚群數 量。再利用 面積與重量 的迴歸分析 資料可得 到 養殖 池 中魚 群 的 總重 量 和重 量 分布 。四 次試 驗 結果 在 計數 方 面 可達 到 平均 95.7% 的準 確 率,在 總 重量 方 面 可達 到 平 均 93.5%的準確率,全池魚群的重量分布結果 與人工量測結果相當一致。本研究成果可以協助養殖管理者了解魚群生長的狀況, 提供管理決 策的依據。 關鍵詞:機 器視覺、魚 類計量、水 道式養殖池AN AUTOMATIC FISH COUNTING AND SIZE ANALYSIS
SYSTEM USING MACHINE VISION
Shiang-Tan Lin
1, Chia-Mon Chang
2, Wei Fang
3, Yuan-Nan Chu
41. Former Graduate Student, Department of Bio-Industrial Mechatronics Engineering, National Taiwan University.
2. Ph.D. Candidate, Department of Bio-Industrial Mechatronics Engineering, National Taiwan University.
3. Professor, Department of Bio-Industrial Mechatronics Engineering, National Taiwan University.
4. Professor, Department of Bio-Industrial Mechatronics Engineering, National Taiwan University, Corresponding Author.
The survival and growth information of cultured fish is vital to fish culturists for making efficient and timely management decisions. However, apart from current net harvesting method which is largely carried out only at the beginning and end of a cultural season due to high labor requirements and induced fish stress, there is no efficient way to collect fish growth information for the entire stock during the regular growing season. This paper presents a new technique using machine vision to obtain survival and weight distribution data with low labor cost and induced fish stress. Operated by one person, the technique is currently designed to be best used for raceway culture, although it has the potential to apply to wider situations. A movable underwater platform is placed in the raceway so that when fish swim through the shallow water on the platform, low overlapping fish images could be continuously collected by a camcorder and later analyzed automatically in the laboratory to obtain fish number and w eight. The Fish Counting and Analysis System (FCAS) software developed by this research performs a series of image pretreatment operations and could get rid of repeated fish images in consecutive frames by establishing a detection line in the image window and an appropriate image processing algorithm. Four verification experiments were conducted with an average accuracy in fish numbers of 95.7%. The average accuracy for weight estimation was 93.5%. Weight distribution analysis results also corresponded well with manually collected data. The new technique could provide fish culturists with important growth information as a basis for decision support.
Keywords: Machine vision, Fish counting, Raceways
一、前
言
魚類養殖過程中很難掌握魚的數量和大小, 除了放苗和收穫的時候可以量測整體重量,並由 取樣獲得每尾平均重量和總數的估計值之外,養 殖過程中因為人力時間的耗費和可能造成魚隻損 傷而無法計量,因此很多養殖管理行為,例如投 餌和分級,常是在對魚隻成長和存活資訊不充分 的情況下進行。 影像處理技術已用在魚苗的影像計數(Chatain et al. 1995;林 1995)、魚 種 和餌 料 生物 的識 別 (Strachan and Nesvadba, 1989; Zion et al., 1999; Yang and Chou 2000)、量測魚隻的大小與重量(Paul et al. 1994)、投餌的控制(Ang and Petrell, 1997; Chang et al., 2005)、魚群捕獲後的加工處理(Pau and Olafsson, 1991)等多方面。但是到目前為止,尚缺乏一種能 在 養 殖 過 程 中 隨 時 監 測 魚 隻 成 長 狀 況 和 大 小 分 布,能監測全部魚隻,成本合理,且可避免離水 量測造成魚隻緊迫的技術。 要用影像技術對養殖中的魚類做經常且全體 性監控的瓶頸是如何在低緊迫狀況下,使魚群全 部通過攝影機,同時能減少影像重疊所造成的誤 差。Cadieux et al. (2000)及何 (2001)使用水中的狹 窄通道讓魚通過,可產生單隻化效果以減少影像 重疊,但是由於魚隻的警覺性高,會抗拒進入通 道,以人力驅趕魚隻則會增加魚隻的緊迫,而且 整群通過通道的速度也仍然太慢。Paul et al. (1994) 以類神經網路將魚的各種形狀特徵和重疊情形建 立不同情況的樣版,Petrell et al. (1997)及 Steeves et al. (1998)利用水中的兩部攝影機透過機器視覺 的幾何原理解決重疊性問題。這些方式基本上不 適合養殖過程中大量且頻繁的計量需求。本 研 究 結 合 影 像 處 理 技 術 和 水 道 式 養 殖 系 統,並以創新的水中平台方式達成低干擾、全面
性的魚隻計量需求。在水道式養殖系統中,由於 水道寬度固定,只需單方向將魚群驅趕通過影像 擷取設備,即可以在耗費很少人力的條件下,完 成全部魚隻的影像擷取。而在減少干擾和避免重 疊方面,則用水中緩升之平台做為取像背景,將 攝影機置於水面上,由上而下取像,不僅在魚隻 通過時可大幅減少重疊,而且由於水中之取像平 台橫斷面遠大於狹窄的水中通道,有助於減少魚 群通過的緊迫和時間,達到魚不離水即可取像計 量的目的。
二、材料與方法
實驗設備與材料 本實驗在台大生機系之循環水道式養殖池進 行。循環水道池如圖 1,水道寬 1m,長 8m。循 環水道式養殖池與一般之水道式養殖池(raceway) 的 差 別 在 於 前 者 水 道 的 兩 端 與 另 一 水 道 首 尾 相 通,水流可以用葉輪驅動而循環流動,像一條無 休止的小河。後者之水流由一端進入,由另一端 流出(Lawson, 1995)。 本實驗使用尼羅紅魚(Oreochromis niloticus), 體長由5~30 cm 大小不等,實驗期間養在水道池 中,實驗設施如圖 2,實驗時先用柵欄將魚集中 於水道之一端,然後將取像平台放入水中,取像 平台為黑色,與尼羅紅魚白中帶紅的顏色對比明 顯,平台處的水深 20 cm。攝影機架設於水道上 方,由上往下拍攝,一旁距離攝影機約30 cm 處 用鹵素探照燈打光,探照燈高度與攝影機高度相 同,以傾斜約 30 度角向下照光,盡量使照光均 勻分布於拍攝區域內。當一切就緒,拿開柵欄, 魚就會陸續通過取像平台到另一邊,必要時推動 柵欄可驅使魚加速通過平台,魚隻通過取像平台 時錄下連續影像,全部通過後便完成影像收集。 攝影時為除去水波的干擾,用玻璃罩壓在水面下 約5 cm 深處。 圖1 循環水道式養殖池 Fig.1 The circular raceway圖2 實驗設施示意圖
影像處理
影像處理是在實驗室內進行。使用Intel Pentium 4-1.6GHz 電腦,含記憶體 256MB,和內接式影像 擷 取 卡(Matrox Meteor、Fram rate:30 FPS、 Transfer rate:35 Mbyte/s、Color Depth:8,15,or32-bit)。影像由攝影機(SONY DCR-PC9、4.5mm CCD 、有效像素340,000 像素、以每秒 30 張交線掃瞄 畫面的速度輸出,擷取的影像解析度為640 480 像素)重播,由影像擷取卡將NTSC 之連續影像 信號轉換為每秒 30 格的個別畫面,再以自行撰 寫之軟體(FCAS)配合 Matrox 的影像處理函式庫 Matrox Image Library (MIL 6.0)進 行 影 像 處 理。 FCAS 軟體以 Borland C++ Builder (BCB 4.0)程式 語言撰寫。 本研究撰寫之FCAS 軟體之影像處理流程如 圖 3,載入影像後,先經過影像前處理,包括平 滑化、二元化、斷開與閉合處理,如下述。 1. 影像平滑化:影像數位化所擷取 到的色階資 訊 是 不 連續 的,為 了使 鄰 近 的 像 素 值分 佈 較 為 連 續,以 改 善 影 像 的 品 質,消 除 微 小 的 雜 訊點,採用3 3 的遮罩以強化影像色階的連 續並減少雜訊,如圖4,作法是取正中央的像 素 和其 周 圍像 素的 亮 度值 與相 關 位置 的權 數 乘積之總和,如公式(1),其中 1 9為 3 3 遮 罩中各像素的加權係數, 1 9為3 3 原始像素 的亮度值,R 為正中央像素經運算後的結果 (Gonzalez and Woods, 1992)。
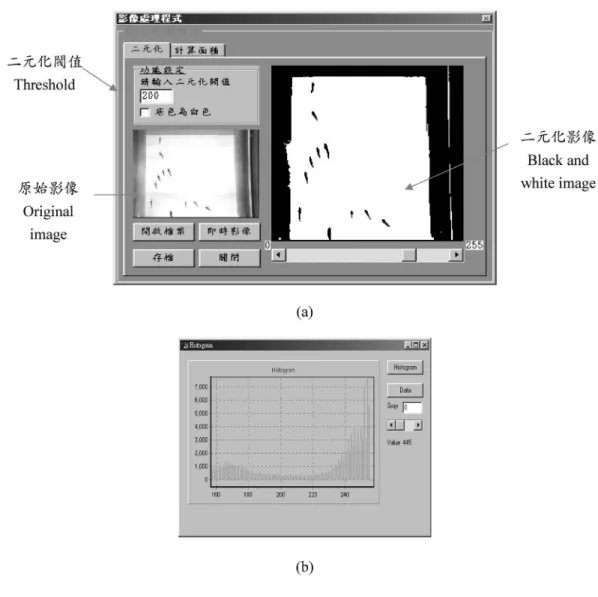
= 1 1+ 2 2+ 3 3+……+ 9 9 1+ 2+ 3+…… 9 (1) 2. 影像二元化:二元化是將灰階影 像以閥值為 分界,轉換為只有最亮和最暗(255 和 0)兩 種灰階值,如圖 5a,如此可將圖形和背景分 離,然 後 再 針 對 圖 形 作 處 理。假 設 原 始 數 位 影 像 , 之灰度範圍為 , ,而 選 擇 二 元 化閥值k,可得二值化數位影像 , ,如公 式(2): , = , , > (2) 圖3 FCAS 軟體處理流程圖 Fig.3 The flow chart of the FCAS software
圖4 3 3 原始像素位置 Fig.4 3 3 pixel location
圖5 FCAS 影像處理軟體:(a)二元化處理視窗,(b)灰度直方圖視窗 Fig.5 Image processing windows of the FCAS software: (a) the window displaying
the original image and the processed black and white image, (b) the window displaying the histogram
灰 度 直 方 圖 是 選 擇 二 元 化 閥 值 的 依 據, 如圖 5b。本實驗因為取景的目標和背景穩定 單純且對比強,直方圖呈現明顯分離的峰值, 分 別 表 示目 標 物 與 影 像 背景 的 灰 階 分 布,如 圖 5b。依本實驗的經驗,選擇二元化閥值為 200 時可得到良好的分割效果。 直 方 圖 乃 是 表 現 影 像 灰 度 分 佈 的 機 率 圖 形,以灰階值 , 為橫座標,機率密度 為 縱 座 標,表 示 各 個灰 階 值 之 像 素 點總 數 所 佔 的 比 例,以 代 表 灰 度 值 小 於 的 像 素 點 總 數,則 可 得 ,如 公 式(3), 值 介 於 灰階值範圍 , 中的某一數值且機率密度總 和為一,如公式(4)。 = 1 = (3) = = 1 (4)
3. 斷開運算(Opening)與閉合運算(Closing):由蝕 刻運算與擴張運算可發展出斷開與閉合運算。 斷 開 運 算先 作 影 像 之 蝕 刻運 算,再 作影 像 之 擴張運算,其功用在除去影像中之雜訊小點, 如圖6a 與 6b。而閉合運算先作影像之擴張運 算,再 作 影 像 之 蝕 刻 運 算,其 功 用 在 補 影 像 中之小洞及將一些斷線連接起來。 經 過 前 處 理 的 二 元 化 影 像 即 可 進 行 計 數 和 面 積 分析。因 為 同一 隻 魚 可 能 在 多張 畫 面 中 出 現,軟 體 必 須 辨 識 重 覆 出 現 的 魚 隻,避 免 重 覆計 數。假 設魚 隻 皆 以 單 方向 通 過 取 像 平台,可在影像畫面中央取一條水平偵測線, 隨 著 時間 經 過 比 對 此一 線 上 的 灰 階 變化,以 判定通過偵測線的魚隻總數。圖7 為偵測線邏 輯判斷之示意圖,圖中I ( line=0 )表示第一張 影像中偵測線上資料並記錄於記憶體中line [0] 的 位 置,而 其 下 方連 續 的 數 字 表示 經 過 編 排 後每點的數據資料,0 表示沒有魚隻通過,數 圖7 使用布林邏輯 AND 運算判斷通過偵測線之魚數計算示意圖 Fig.7 Schematic diagram showing fish count using a Boolean logic operator,
AND, on the detection line
圖6 (a)原始影像,(b)斷開處理後之影像
字1 表示第一尾魚的資料,數字 2 表示第二尾 魚的資料,以此類推,II (line=1)表示第二張 影像中偵測線上的資料。III 表示將 I 和 II 進行 資料相加且做邏輯演算AND 的結果,圖中 A' 及B'部分即為 I 和 II 做邏輯演算 AND 的結果。 圖 中第 一 張影 像偵 測 出兩 尾魚 而 第二 張影 像 測出三尾魚,經計算後可得重複尾數為兩尾, 所 以 總 和為 三 尾 魚 通 過 偵測 線。三 尾魚 在 偵 測 線上 的 資訊 在編 號 後存 回記 憶 體中 原位 置 並 累 計 面積 點 數。依序 將 偵 測 線 的 資料 和 上 一 張 影 像偵 測 線 資 料 相 加,即 可 得 出通 過 偵 測線所有魚隻的數量和面積。 影 像 分 析 完 成 後 軟 體 會 將 魚 隻 的 面 積 和 計數資料輸出至Excel,同時繪出影像處理結 果的空間-時間(Spatio-Temporal)圖,如圖 8。 面積與重量之關係實驗 由影像處理得到個別魚體面積之後,可經由 面積與重量的迴歸方程式計算養殖魚群的重量分 佈。面積與重量之迴歸方程式是以實驗量測30 餘 尾魚的參數後求得。實驗步驟如下: 1. 將一尾魚置於玻璃水缸中。 2. 用攝影機由上而下拍攝三張影像。 3. 將魚撈出玻璃水缸,用電子秤量測重量。 4. 重複 1~3 步驟至記錄適當的資料數為止。 5. 用影像處理軟體計算每尾魚的俯視面積的平 均值。 影像計量驗証實驗 為 了 驗 証 影 像 處 理 軟 體 的 正 確 率 和 應 用 效 果,共進行四次計量驗証試驗,將每次所錄製的 影像用人工監測後記錄通過的總尾數,然後和軟 體自動辨識後的結果比對,來計算每段軟體處理 後所得總尾數的準確率。準確率之公式如下: 準確率=(總尾數-誤判尾數)/總尾數 100 % 為了驗証影像處理求得魚群之體重分布和總 重量的正確性,由量測魚群中抽樣138 尾,實際 一一秤重以求得重量分布和平均重量。實驗結果 此138 尾共計 17299.5 g 重,每尾平均重量為 125.4 g,重量範圍 20.4~431 g。 圖8 FCAS 軟體畫面顯示空間-時間之魚數圖
Fig.8 A snap shot of the FCAS software showing the Spatio-Temporal fish count diagram
三、結果與討論
魚體面積與重量之迴歸分析 魚體面積與重量迴歸分析的結果如表1。面 積與重量的指數迴歸的R2值(0.977)比線性迴歸的 R2 值(0.9369)高,顯示面積與重量的指數迴歸公 式比線性迴歸公式更適合用來估計魚體重量,雖 然二者在數值上的差異並不大。 由面積與實際重量迴歸線圖(圖9)可看出, 魚 的 重 量 越 小,對 線 性 公 式 的 偏 離 有 愈 多 的 趨 勢。x 為 389 時 y 值為 0,表示當面積小於 389 pixels (大約為6.6 cm2)時使用線性迴歸公式將判定魚 的重量為 0 g,此與真實情形顯然不一致。而若 採用指數迴歸公式來表示面積與重量的關係,因 為其通過原點,比較接近量測結果。 影像計量結果 四次試驗所拍攝的連續影像經過FCAS 軟體 分析處理之後,可得到每次通過取像平台的魚的 總數和重量分布。四次試驗計算總尾數的結果如 表2,計數準確率最高為 99.7%,最低為 91.1%, 平均準確率為95.7 %。 四次試驗結果誤判尾數均為正值,主要原因 是因二元化閥值切割後,魚體和尾鰭連接處因亮 度較暗且俯視面積較小,所以切割後可能使兩處 分離,造成程式將同一尾魚判別成魚身和魚尾兩 尾魚,而此一結果在多計算的尾鰭部分所佔面積 均很小,經重量迴歸分析後,會記錄成重量較輕 的資料。 第 四 次 試 驗 的 拍 攝 時 間 不 到 先 前 三 次 的 一 半,是因為希望讓魚更快速的通過取像平台,減 少取像時間。但是由於驅趕魚群通過平台的壓力 增加魚群的緊迫,產生魚隻來回游動及亂竄的情 表1 面積與重量線性迴歸和指數迴歸的比較Table 1 Comparison of linear and exponential regressions between fish image area and fish weight
圖9 面積與實際重量線性迴歸和指數迴歸圖 Fig.9 The linear and exponential regressions
形,因此產生的誤判尾數增多,使準確率相對降 低。 四次試驗的魚的尾數不同,是因為本試驗使 用之循環水道池有幾處死角,例如葉輪下方、曝 氣盤及空氣管下方等,所以每次集魚時的數量不 同。第一次試驗時因缺乏經驗,所趕出的魚隻總 數最少,後續操作純熟後數量即增加。商業化的 水道式養殖池通常只有一條直道,不會有本試驗 的循環水道池的死角,所以集魚和趕魚的效率應 比本實驗更好。 重量分布的實驗結果如圖10,整體而言,由 影像計量處理所得到的四次重量分布結果與由人 工取樣稱重的重量分布相當接近,已經符合養殖 管理的需求。對於養殖而言,重量分布的資訊可 以提供管理者做是否提高投餌量及分級的依據。 本結果顯示魚群的重量分布多集中於0~200g,約 佔整體的80%,而最高的比例區間在 50~100g。 重量分布的結果呈現偏向較輕一側,此與一般養 殖經驗一致,是由於養殖魚類的族群中總有少數 成長特別快速,其攝餌能力亦較強。反過來體型 小的魚隻因為被大魚排擠,經常吃不到餌料而減 緩成長,使大者更大,小者恆小,所以才需要經 常依魚的體型分池,以增加整體的成長速度。 表3 是四次試驗對通過影像平台的魚的總重 量的估算結果。魚的總重量是以平均重量乘以魚 的總數求得。四次試驗對總重量的估算準確率最 高為96.9%,最低為 90.8%,平均準確率為 93.5%, 已符合養殖管理的需求。對於養殖管理而言,總 重量的資訊有助於調整投餌量及估計魚的成長速 度。 表2 影像計量實驗結果
Table 2 Results of the fish counting experiments
圖10 四次驗証實驗所得到的魚隻重量分佈圖與實 際重量分布的比較
Fig.10 Comparison of the fish weight distributions by the four trials with the actual weight dis-tribution
較暗的位置會清楚分離出,而鰭部張開與否會直 接造成影像面積的增減,當魚群同時通過平台的 數量增多時,容易將左右或前後靠近的魚隻判讀 成同一尾,造成面積的增大和尾數的少算;若切 割閥值過大時,測得的面積範圍會相對減少,使 迴歸重量小於實際重量,所以在拍攝時,光照射 範圍需分佈均勻且亮度足夠以清楚分離出魚體。 影像分析的正確性除了受到二元化閥值的影 響,魚的相關位置及影像環境亦很重要,尤以前 者很難單靠影像處理技巧克服。當兩尾魚左右並 排同時通過偵測線時,正常的斷開運算無法區分 兩者,就會當成同一尾魚,除了少算一隻魚,亦 會將兩尾魚的總面積加在一起而錯估重量。重疊 的問題如果不發生在偵測線上,就不會造成計數 誤差,但是若影像仍在魚體面積計算範圍內,就 會 增 加 該 魚 的 面 積。此 時 有 幾 個 可 能 的 解 決 方 式,一是設定魚隻體型的上限,如果影像面積超 過上限,即表示至少有兩隻魚的影像重疊,但是 不能判定兩隻或更多魚的相對大小。另一種方式 是增加一條偵測線,對照兩組偵測線的資料以除 去差異,Khoudour 等人(1996)即曾應用掃瞄兩條 地面的白色平行線方式,進行大眾運輸系統通行 者的速度、移動量和大小的計算。還有一種方式 是運用模版的技巧判斷魚隻並排的影像,Paul 等 人(1994)即曾以類神經網路將魚的各種形狀特徵 和重疊情形來建立不同情況的樣版,後兩種方式 均會大幅增加影像處理軟體的複雜度,由於本研 究所得到的計數和重量準確率都已符合養殖管理 一般的需求,所以沒有採用。 表3 的資料顯示四次試驗的總重量誤差均為 正值,表示推算出的總重量比實際重量大,可能 是因為選取二元化切割的閥值不足所造成。閥值 過大時會使得辨識出的魚體面積減少,而閥值過 小時面積增大,導致迴歸的重量偏高。所以拍攝 魚群通過平台時的光源亮度須和建立面積與重量 迴歸方程式的實驗環境盡量一致,在最佳的情形 下若光源亮度和實驗環境相同,兩者切割的閥值 只要設定一致即可避免閥值切割調整上的困擾。 由總重量估算結果發現,總尾數的準確率並 不直接影響總重量的結果,主要是因為當尾數多 計算時,其原因多為二元化切割後魚的尾部和主 體分離,而尾部所佔的面積值較小,相對迴歸出 的重量也較輕,影響總重量的比例不大。而尾數 少算時,其原因多為魚體重疊所造成,而其所佔 的面積均儲存於同一尾魚體的面積資料內,雖然 尾數減少但其面積為兩尾魚的面積和,相對迴歸 出的重量因而增加,所以對重量而言因尾數少算 所造成的重量誤差較大。就重量分布而言,當尾 數多算時,多屬魚的尾部面積較小部分,所以會 造成0~50g 範圍所佔比例增大,而因魚體左右重 疊發生尾數少算時,會使重量較大的範圍內所佔 的比例增大。 綜合討論 影響影像辨識過程最重要的一環為二元化閥 值的選取,最佳的二元化切割效果是讓魚體的整 體影像和背景恰好分離,過小的閥值易造成較亮 背景資訊判讀成魚體,且魚體中胸鰭、尾鰭部份 表3 總重量估算結果 Table 3 Estimated total weight of fish
其他還有一些情形會造成影像分析的誤差, 例如當前、後尾魚游經偵測線時間過近,若兩隻 一 前 一 後 通 過 偵 測 線 的 時 間 小 於 畫 面 儲 存 時 間 (130 秒),則會使尾數少算,而將兩尾魚的面積資 料記錄於同一尾魚。還有當同一條魚的尾部在二 元化處理後會造成尾部面積不連接,因此會計為 兩尾魚,且面積儲存資料均遠小於其他的面積資 料,這個問題可以用設定魚隻體型下限的方式處 理。 由於魚的活動,前後數張影像可能對同一尾 魚的面積產生差異。例如由於魚胸鰭或尾鰭的擺 動可能改變俯視面積。另外有時候魚群會因為緊 張而在取像平台上來回游動,當同一尾魚已經過 拍攝平台卻又游回來時,軟體會多計算一尾魚。 取像時的不良環境亦可能造成誤差。環境因 素包括天候、水面擾動、光源、水中雜質等。本 研究四次拍攝影像分別在不同的天候和時間,為 了避免環境光度不同影響影像分析的一致性,在 拍攝時將養殖池頂的遮陰網拉開,以減少外部日 光所造成光源不均勻或明暗不定等問題。 拍攝時水面上安置一透明玻璃板,目的為了 去除水波紋所造成影像辨識上的困難,但在裝置 過程需避免玻璃下方產生氣泡,因在輔助光源的 照射下,氣泡周圍呈現較亮的一圈會造成辨識上 的誤差。 輔助光源必須提供穩定且均勻分布的打光效 果,使魚體與背景有效的分離,光源的架設位置 和亮度需固定,來排除因光源不同產生的變因。 因為攝影機為由上往下拍攝,光源得避免經過水 面所造成的反射現象。若部分光源被遮蔽物擋到 時,魚群會沿著光源較暗的位置通過,所以拍攝 時光源需均勻分佈於拍攝範圍內。 水中的懸浮物如飼料、枯葉、魚的排泄物等 易使得辨識上產生困難,浮於水面上的雜質因玻 璃罩的保護不會通過拍攝範圍,但若懸浮於水中 的雜質就得盡量避免,所以拍攝影像時注意避開 餵食時間,集魚過程中要放慢速度減少對魚群不 必要的驚擾。 魚有逆水游動的習性,所以實驗時魚的前進 方向與水流方向相反。在用柵欄驅趕魚群時,若 驅趕速度過快,魚群反而會朝著柵欄碰撞而造成 不必要的傷害,所以實驗過程中採漸進方式移動 柵欄,使魚陸續通過取像平台。魚有群體行動的 特性,通過拍攝平台時會一批一批的通過。 本技術的特色是相對於用漁網收穫稱重的方 式,提供一種魚不離水即可完成計量的技術,減 少養殖過程中為了計量而造成魚隻的緊迫及傷害 的機會。本系統特別適合水道式養殖池,可以在 低干擾下完成整池魚隻的計量。但是本系統亦可 架設在開放空間的池塘中,只要用漁網圍魚在水 中取像平台的一側,由於漁網中很擁擠,魚應會 自然通過取像平台,達成取像目的。 依本研究的經驗,每次計量所花的時間包括 用柵欄將魚群集中約 10 分鐘、架設設備和收拾 設備約10 分鐘、拍攝魚群通過的影像約 15 分鐘, 只要單人操作,約花半小時可完成接近600 隻魚 的影像收集,過程中魚幾乎不受驚擾。攝取的影 像連接電腦分析時完全不用人力參與即可得到計 數和重量結果。商業化的水道式養殖場通常有10 條以上的平行水道,可以在一天以內依序架設設 備及完成取像和計量分析。本系統所能應用的魚 隻大小並無限制,如果魚的平均體型更大,則僅 需調整取像平台的水深,使大魚更容易通過。魚 隻體型增加時,因為二元化閥值的不良造成的誤 差相對於魚的面積比例會變小,所以影像分析的 準確率相信會更高。 本研究所發展的水上取像技術已由實驗結果 証實可行,相對於前人的水中取像(Cadieux et al., 2000;何,2001),水上取像容易實施,對於各種 養殖環境的適應力亦更高,可使養殖過程中的影 像計量更為可行。 本研究對影像的處理速度為平均每秒鐘10 張 影像,以前述約600 隻魚的影像約 15 分鐘來說, 電腦處理影像的時間約 45 分鐘,是拍攝影像時 間的三倍。若配合更新更快速的硬體規格可能可 以達到影像的即時處理,在電腦硬體規格快速提 昇下,未來應可以在池中即時完成影像的收集和 分析,立刻得到魚類的計量資訊。
五、結
論
目前養殖業者仍缺乏一種能在養殖過程中以 低人力、低干擾方式作全面性計量的技術,本研 究開發水中平台式的影像收集和自動化影像分析 技術,對於解決魚群計量的需求已提出一個可行 的方案。本研究所開發的技術可以在魚不離水的 情形下完成低重疊性影像的取像,運用影像處理 技術完成自動化的計量和重量分析,實驗結果在 計數方面可達到95.7%的準確率,在總重量方面 可達到 93.5%的準確率,並可藉由自動化的分析 建立全池魚群的重量分布資訊,對於養殖管理者 了解魚群生長的狀況和管理決策可以提供重要的 依據。六、參考文獻
1. 何建忠。2001。機器視覺應用於循環水道式養 殖 池 魚 類 之 計 量 分 析。碩 士 論 文。台 北:國 立台灣大學生物產業機電工程研究所。 2. 林宜弘。1995。機器視覺應用在魚苗計數可行 性之研究。農業機械學刊4(2) : 37-453. Ang, K. P. and R. J. Petrell. 1997. Control of feed dispensation in sea cages using underwater video monitoring: effects on growth and food conversion. Aquaculture engineering 16: 45-62. 4. Cadieux, S., F. Michaud and F. Lalonde. 2000.
Intelligent system for automated fish sorting and counting. Proceedings of the 2000 IEEE/RSJ Intelligent robots and systems. 1279-1284. 5. Chang, C. M., W. Fang, R. C. Jao, C. Z. Shyu, and I.
C. Liao. 2005. Development of an intelligent feeding controller for indoor intensive culturing of eel. Aquacultural Engineering 32: 343-353. 6. Chatain, B., L. Debas and A. Bourdillon. 1995. A
photographic larval fish counting technique : comparison with other methods, statistical
appraisal of the procedure and practical use. Aquaculture 141: 83-96.
7. Gonzalez, R. C. and R. E. Woods. 1992. Digital Image Processing. 189-195. New York: Addison-Wesley.
8. Khoudour, L., J. P. Deparis, L. Duvieubourg. 1996. Linear image sequence analysis for passengers counting in public transport. IEEE 425: 100-104. 9. Lawson, T. B. 1995. Fundamentals of Aquacultural
Engineering. New York: Chapman & Hall.. 10. Pau, L. F. and R. Olafsson. 1991. Fish quality
control by computer vision. New York: Marcel Dekker, Inc.
11. Paul, F. N., F. C. Philip and A. P. Derek. 1994. Automatic fish population counting by artificial neural network. Aquaculture 133:45-55.
12. Petrell, R. J., X. Shi, R. K. Ward, A. Naiberg and C. R. Savage. 1997. Determining fish size and swimming speed in cages and tank using simple video techniques. Aquaculture Engineering. 16: 63-84.
13. Steeves, G. D., R. H. Peterson and L. D. Clark. 1998. A quantitative stereoscopic video system for visually measuring the linear dimensions of free-swimming fish. IEEE 3: 1405-1408.
14. Strachan, N. J. C. and P. Nesvadba. 1989. Fish species recognition by shape analysis. Pattern Recognition 23(5): 539-544.
15. Yang, C. Y., Chou, J. J. 2000. Classification of rotifers with machine vision by shape moment invariants. Aquacultural Engineering 24: 33-57. 16. Zion, B., A. Shklyar and I. Karplus. 1999. In-vivo
fish sorting by computer vision. Aquaculture Eengineering 22: 165-179.
收稿日期:2005 年 10 月18 日 修改日期:2006 年 1 月23 日 接受日期:2006 年 2 月 8 日