行政院國家科學委員會專題研究計畫 成果報告
GPS 接收儀檢定指標及觀測資料品質之研究
計畫類別: 個別型計畫 計畫編號: NSC92-2211-E-009-061- 執行期間: 92 年 08 月 01 日至 93 年 07 月 31 日 執行單位: 國立交通大學土木工程學系 計畫主持人: 陳春盛 計畫參與人員: 蔡福利,葉大綱,林進福 報告類型: 精簡報告 處理方式: 本計畫可公開查詢中 華 民 國 93 年 7 月 6 日
行政院國家科學委員會補助專題研究計畫
; 成 果 報 告
□期中進度報告
GPS 接收儀檢定指標及觀測資料品質之研究
A study on the GPS data quality and inspective
indexes of GPS receivers
計畫類別:;個別型計畫 □ 整合型計畫
計畫編號:NSC92-2211-E-009-061-
執行期間:92 年 8 月 1 日至 93 年 7 月 31 日
計畫主持人:陳春盛
共同主持人:
計畫參與人員:蔡福利、葉大綱、林進福
成果報告類型(依經費核定清單規定繳交):
;精簡報告 □完整
報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究
計畫、列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年;二年後可公
開查詢
執行單位:國立交通大學土木工程系所
中 華 民 國 93 年 7 月 日
摘
要
為了探討GPS觀測資料品質與基線解算精度間之關聯性,本研究採用了五項 觀測資料品質指標,分別為接收儀內部時鐘的穩定度、接收儀內部時鐘與GPS時 鐘的平均偏差量、『觀測資料的筆數』除以『週波脫落的數目』、L1載波的多 路徑效應、L2載波的多路徑效應。 為了消除不同環境因素對定位精度所造成的影響,本項測試選在國家GPS校 正場進行,將六部儀器同時整置在GPS校正基樁上,於2004年1月5日至1月8日連 續同步接收72小時。以Bernese 4.2版軟體及Teqc軟體來進行觀測資料品質的解 算,並蒐集IGS日本USUD站、台灣TWTF以及內政部北港PKGM站的GPS觀測資 料,約制上述三衛星追蹤站坐標作為主站,以Bernese 4.2版軟體進行不同距離的 基線解算。 整體來看,以接收儀內部時鐘頻率穩定度影響定位精度為最大,次之為週波 脫落及多路徑效應,最後則為接收儀內部時鐘偏移量。在內部時鐘頻率穩定度及 週波脫落這兩項指標上表現較佳的接收儀,其坐標重現性的定位精度也較其它接 收儀來得好。 關鍵詞:全球定位系統、GPS 接收儀檢定指標、觀測資料品質Abstract
For discussing the relation between the data quality and the precision of the baseline. In this project , five indexes are chosen for discussing GPS data quality. They are clock offset, clock stability, multipath on L1, multipath on L2 and observations by cycle slips (o/slips).
For reducing common errors, six types of GPS receivers are chosen and set up at Ultra-Short Distance Network of NML (National Measurement Laboratory, Taiwan) during three days. The first three indicators are calculated by Teqc software and the last two indicators are solved by Bernese software.
Moreover, the observations of three GPS tracking stations are obtained through internet, short baseline (about 25 km), middle baseline (about 150 km) and long baseline (around 2000 km) are processed by Bernese software.
We found that clock stability and o/slips were very important factors for the positioning. Clock offset and multipath effects would not be the critical factors to influence the GPS results. We hope the information is helpful for GPS users when they decide to purchase any GPS receiver and to process GPS data.
一、前言
全球定位系統(Global Positioning System, GPS)在近十年來於世界各地廣泛 地使用著,由於 GPS 的作業快速、方便且高精度,因此 GPS 定位技術已普遍應 用於工程測量、地籍測量、汽車導航、地殼監測以及地體動力學等領域,為了達 到高精度、高準確度的定位成果,確保測量定位品質,並符合 ISO 品保要求, 其校正追溯性已漸受各界重視【Leick, 1995】【曾清涼等,1999】。 由於全球定位系統自一九七八年發射第一顆試驗衛星以來,歷經二十餘年的 研究,無論在硬體或軟體方面皆有長足的進步。而在進行 GPS 觀測的過程中所 得到的觀測數據,會因為某些原因而導致品質不符合需求。這些誤差在經過許多 學者的多年研究下,已可經由數學模式使其影響降至最低。不過對於定位精度與 觀測資料品質之間關聯性的研究,却較少有聽聞。 所以本研究採用了五項 GPS 觀測資料品質指標,分別是 L1 載波的多路徑效 應(MP1)、L2 載波的多路徑效應(MP2)、『觀測資料的筆數』除以『週波脫落 的數目』(o/slps)、接收器內部時鐘與 GPS 時鐘的平均偏差量(tp)以及接收儀 內部時鐘的穩定度(fp)【葉大綱等,2002】,來分析 GPS 觀測資料品質與基線 解算精度之相關性,期望能提供未來的使用者在選用 GPS 量測設備之參考,並 期望能透過 GPS 觀測資料的品質監控,進而提昇 GPS 量測之精度及可靠度。
二、精度分析指標
本研究所採用的精度分析指標有下列五項: (1) MP1:L1 載波的多路徑效應,亦可視為 L1 載波觀測量的雜訊大小,其計算 方式如(1)式,此雜訊量在本文中以公尺為單位【李旭志,1999】。 (2) MP2:L2 載波的多路徑效應,亦可視為 L2 載波觀測量的雜訊大小,其計算 方式如(2)式,此雜訊量在本文中以公尺為單位【李旭志,1999】。 2 1 1 1 2 1 2 1 1 Φ − + Φ − + − = α α P mp (1) 2 1 2 1 1 2 1 2 2 Φ − − + Φ − − = α α α α P mp (2) 上兩式中: = P 虛擬距離觀測量 = Φ 載波相位觀測量(
)
2 2 1 f f = α 1 1 L f = 之頻率=1575.42MHz2 2 L f = 之頻率=1227.60MHz (3) o/slps:此項指標為『觀測資料的筆數』除以『週波脫落的數目』,亦即每n 個觀測量會產生一個週波脫落,無單位,這裡採用多項式套合法來偵測週波脫落 【陳正唐,2001】。 (4) 接收器內部時鐘與GPS時鐘的平均偏差量:在本文中將採用tp來表示這項 精度指標,以秒為單位,其計算原理請參考Bernese Guide【Beutler et al., 2000】。 (5) 接收儀內部時鐘頻率穩定度:在本文中將採用 fp 來表示這項精度指標,以 秒為單位,其計算原理請參考Bernese Guide【Beutler et al., 2000】。
其中,前三項指標是以UNAVCO所研發的TEQC軟體解算而得【UNAVCO, 2002】,而最後一項指標則是以瑞士伯恩大學天文所研發的Bernese 4.2版軟體計 算而得。
三、實驗方法及實驗儀器
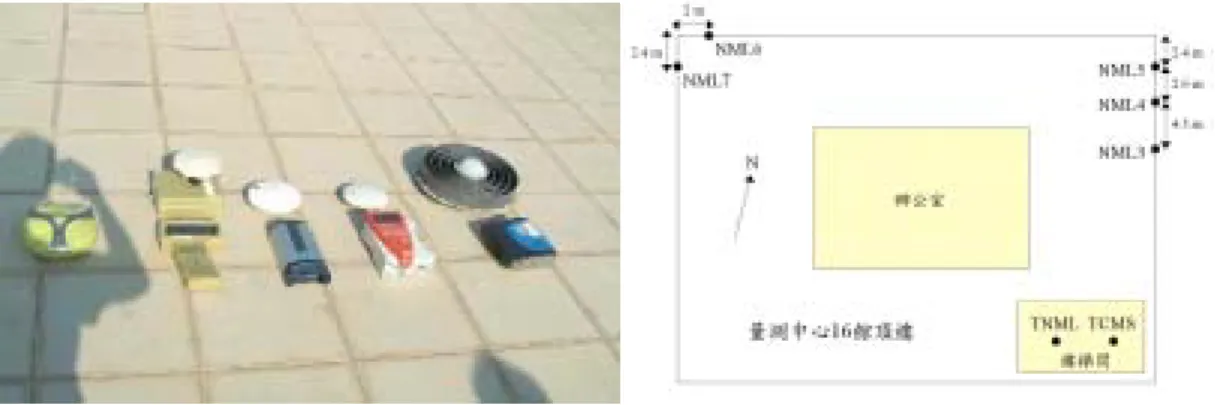
在本文中,吾人針對五種廠牌六種型號的GPS接收儀進行測試,採用的儀 器詳如表1及圖2。而為了消除不同環境因素對定位精度所造成的影響,本項測 試選在國家 GPS 校正場進行,校正場平面示意圖如圖3 所示。因為接收地點都 在國家 GPS 校正場,所以各接收儀的所受到的對流層及電離層誤差效應可說是 完全相同,這樣可確保在相同的環境下,針對不同儀器的特性分析其短、中、長 距離基線定位之精度,進而測試觀測資料品質與定位精度之相關性。 將六部儀器同時整置在 GPS校正基樁上,於2004年 1月5日至 6日連續 72 小時同步接收,資料取樣間隔設定為 30秒,衛星接收仰角為 15 度,並藉由 儀器廠商所提供之轉換程式,將各廠牌的原始觀測資料轉換成 RINEX 共通格 式,以方便後續的資料處理。 表1 測試儀器整置樁位一覽表 整置樁位 測試儀器 觀測時數 備註 TNML A型 連續72小時 為固定站,樁位透空 度較佳 NML3 B型 連續72小時 接收儀放在室內 NML4 C型 連續72小時 接收儀放在室外,儀 器未維持室內恆溫 NML5 D型 連續72小時 接收儀放在室外,儀 器未維持室內恆溫 NML6 E型 連續72小時 接收儀放在室外,儀 器未維持室內恆溫 NML7 F型 連續72小時 接收儀放在室內圖2 測試所採用的儀器 圖3 國家GPS校正場平面示意圖
四、精度分析指標解算
4-1 Teqc 解算資料訊號品質成果 先將 GPS 觀測資料以 4小時為一時段,共分成 18 期,再利用本研究之品 質檢核軟體Teqc進行解算。所求得的各種廠牌型號接收儀之L1載波的多路徑效 應(MP1)、L2載波的多路徑效應(MP2),『觀測資料的筆數』除以『週波脫落 的數目』(o/slps),如表2,這裡僅取平均所示。 表2 各種廠牌型號接收儀之MP1、MP2及o/slps 廠牌型號 MP1(m) MP2(m) o/slps A型 0.33 0.35 96 B型 0.18 0.20 1144 C型 0.89 0.62 80 D型 0.49 0.49 3112 E型 0.05 0.09 2888 F型 0.19 0.23 3234 由上述資料可看出在多路徑效應MP1及MP2這兩項觀測指標上,以E型儀 器的精度較好,以C型的精度較差;而在o/slps這項觀測指標上以F型的精度較 好,以A型及C型的精度較差。 4-2 Bernese 4.2 版解算資料訊號品質成果 在解算內部時鐘偏移量及頻率穩定度時,須選擇一接收儀之內部時頻為標 準,本研究中所選擇的是 IGS站中美國的AMC2 站,此追蹤站位於美國的科羅 拉多州的柯泉市,由美國的海軍天文台所管理,GPS接收儀和天文台的氫原子鐘 放置於同一建築物中,所以可以快速的改正 GPS 接收儀時鐘的時間。因其採用 的內部時鐘是氫原子鐘,其時鐘偏移量及頻率穩定度皆達一定之水準,且優於一 般GPS接收儀內部的晶體時鐘【U.S. Naval Observatory】。因此,在這一節使用 相位推求接收儀內部時鐘偏移量及頻率穩定度時,將以該接收儀之內部時頻為標 準(即假設其內部時鐘偏移量及頻率穩定度為0),來進行後續的資料處理。研發的 Bernese 4.2 軟體進行計算。為了求得較準確的接收儀時頻訊息,解算前 除了以 rnxsmt 程式對於相位資料進行週波脫落偵測及平滑化處理外,於參數預 估程式 gpsest 解算未知值的過程中,再以 resrms 程式利用輸出的殘差反覆消除 雜訊較大的觀測時段及衛星【Beutler et al., 2000】,即可求得接收儀內部時間偏 移量及頻率穩定度,如表3,僅取平均所示。 表3 各種廠牌型號接收儀之tp及fp 廠牌型號 tp(秒) fp(秒) A型 9.01E-04 1.29E-09 B型 -6.76E-08 1.34E-09 C型 -1.28E-08 1.33E-09 D型 -1.74E-05 1.27E-09 E型 -5.04E-09 1.34E-09 F型 1.75E-07 1.50E-09 由上述資料可看出在內部時鐘的平均偏差量(tp)這項觀測指標上,以E型 的精度較好,以A型的精度較差;在內部時鐘的穩定度(fp)這項觀測指標上, 平均值方面以D型的精度較好,以F型的精度較差。
五、坐標解算
透過網路下載IGS連續追蹤網中的日本USUD衛星追蹤站、台灣TWTF衛星追 蹤站以及內政部北港衛星追蹤站的GPS觀測資料,約制上述三站坐標作為主站, 分別對各種廠牌型號儀器進行短距離(25 km,對TWTF站)、中距離(150 km,對 北港站)、長距離(2000 km,對USUD站)的基線解算,用以評估各型儀器不 同基線距離的定位精度。追蹤站位置與實研場地分布如下圖4及圖5,圖中TNML 代表新竹實驗場所在地。 圖4 TWTF及PKGM追蹤站分布圖 圖5 USUD追蹤站分布圖吾人將72小時資料以4小時唯一時段,分成18個時段,分別對不同儀器進 行相對定位基線解算。將每一時段計算而得的基線長減去其平均值,將可以得到 各基線每時段計算結果的變化量,所獲得的成果如下表4。 表4 各種廠牌型號儀器不同距離基線定位精度 廠牌型號 長距離(m) 中距離(m) 短距離(m) A型 0.0175 0.0014 0.0011 B型 0.0179 0.0015 0.0013 C型 0.0187 0.0020 0.0017 D型 0.0181 0.0017 0.0016 E型 0.0185 0.0028 0.0027 F型 0.0180 0.0020 0.0017 雖然各接收儀的觀測資料品質各有優缺點,但其影響量反映在長、中、短基 線的解算成果上,相差都在2mm以下,可算是非常的小,也滿足內政部GPS衛 星點測量規範的精度,如下表5。因此,吾人進行下一小節的測站坐標分析,將 分別針對N、E、h方向進行更深入的精度探討。 表5 內政部GPS衛星點基線重複姓測量規範 基線重複性 一等衛星控制點 二等衛星控制點 重複觀測基線水平分量 ≦10mm+2ppm ≦20mm+4ppm 重複觀測基線垂直分量 ≦25mm+5ppm ≦50mm+10ppm 為了分別針對坐標N、E、h方向進行探討,吾人先透過內政部所提供的坐 標轉換程式將X、Y、Z坐標轉換為N、E、h坐標,以方便針對平面方向以及高 程方向的穩定度做更進一步的探討。與4-2小節相同,吾人亦採用這72小時觀 測資料的坐標平均值作為標準值,將每一時段計算而得的N、E、h坐標分別減 去其平均值來進行坐標重現性分析,計算各型儀器長距離相對定位N、E、h三 軸坐標標準差及其合成量作為定位精度指標,成果如表5到表7,這裡僅取平均 所示。 表5 各型儀器長距離定位N、E、h三軸坐標標準差及三維合成量 廠牌型號 N(cm) E(cm) h(cm) 水平(cm) 合成量(cm) A型 1.05 2.09 3.44 2.34 4.16 B型 1.02 2.13 3.13 2.37 3.92 C型 1.04 2.18 4.31 2.41 4.94 D型 1.01 2.26 3.77 2.48 4.51 E型 1.10 2.34 3.53 2.59 4.37 F型 0.95 1.66 5.27 1.92 5.61
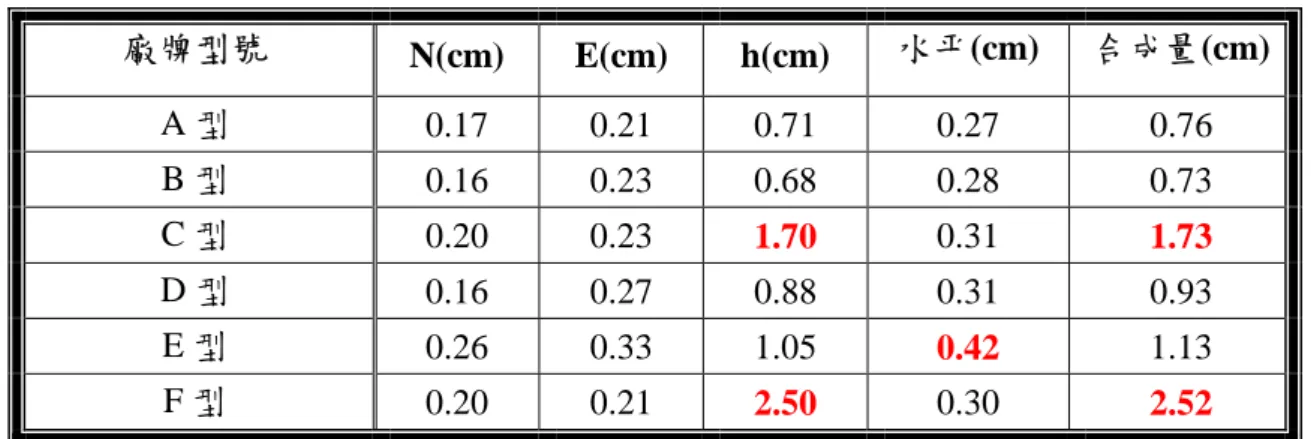
表6 各型儀器中距離定位N、E、h三軸坐標標準差及三維合成量 廠牌型號 N(cm) E(cm) h(cm) 水平(cm) 合成量(cm) A型 0.17 0.21 0.71 0.27 0.76 B型 0.16 0.23 0.68 0.28 0.73 C型 0.20 0.23 1.70 0.31 1.73 D型 0.16 0.27 0.88 0.31 0.93 E型 0.26 0.33 1.05 0.42 1.13 F型 0.20 0.21 2.50 0.30 2.52 表7 各型儀器短距離定位N、E、h三軸坐標標準差及三維合成量 廠牌型號 N(cm) E(cm) h(cm) 水平(cm) 合成量(cm) A型 0.13 0.16 0.59 0.21 0.62 B型 0.11 0.19 0.70 0.22 0.74 C型 0.10 0.24 1.63 0.26 1.65 D型 0.13 0.20 0.53 0.24 0.58 E型 0.25 0.23 0.98 0.34 1.03 F型 0.17 0.21 2.32 0.27 2.33
六、品質指標與相對定位精度之分析
這一節將利用第四節的資料品質指標解算成果和第五節的相對定位精度,評 估GPS觀測資料品質與相對定位精度之相關性。首先先將各廠牌型號儀器的品質 指標及相對定位精度(三維合成量)整理成表8。 表8 觀測品質指標及長、中、短距離相對定位精度 廠牌型號 MP1(m) MP2(m) o/slps tp(秒) fp(秒) 長距離 cm 中距離 cm 短距離 cm A型 0.33 0.35 96 9.01E-04 1.29E-09 4.16 0.76 0.62 B型 0.18 0.20 1144 -6.76E-08 1.34E-09 3.92 0.73 0.74 C型 0.89 0.62 80 -1.28E-08 1.33E-09 4.94 1.73 1.65 D型 0.49 0.49 3112 -1.74E-05 1.27E-09 4.51 0.93 0.58 E型 0.05 0.09 2888 -5.04E-09 1.34E-09 4.37 1.13 1.03 F型 0.19 0.23 3234 1.75E-07 1.50E-09 5.61 2.52 2.33 根據本文之研究結果發現,整體來看在相對定位時,5項觀測指標中以接收 儀內部時鐘頻率穩定度(fp)的影響為最大,如A型及D型這兩部儀器的頻率穩 定度較好,故其定位精度相較起來也較為突出,而F型這台接收儀的頻率精度較 差,所以其定位精度在6台儀器中也較差一些。 第二項影響較大的是週波脫落(o/slps),如A型、C型及E型這三台儀器中的頻率穩定度皆差不多,但以 C 型的週波脫落最為嚴重,故其精度也較差; 第三項影響較大的本應為多路徑效應MP1及MP2,但在本實驗看來,多路徑效 應較為嚴重的 C 型,其定位精度反而比多路徑效應最少的 E 型來得更好,且其 在長、中距離相對定位精度上也為最好,可能是因為本實驗位於工研院頂樓,所 以多路徑效應還未明顯到可以影響定位精度,也或許是因還有會影響 GPS 定位 的指標沒被考慮到。影響最小的指標為接收儀內部時鐘偏移量,雖然每個接收儀 內部時鐘的偏移量彼此之間差距都甚大,但在定位精度上卻看不出有何影響。 2 0 1
(
oe)
2(
oe)
a
a t
t
a t
t
ε
= +
−
+
−
ε
:時間修正量 0 a :相對於 GPS時的時間偏差(clock bias) 1 a :相對於實際頻率的頻率偏差係數(clock drift) 2a
:為時鐘頻率的飄移係數(clock drift-rate)t
:接收儀時間 oet
:參考時間 我想這是因為接收儀內部頻率穩定度之好壞遠比其內部時鐘偏移量之大小 來得重要,主要原因可以用上面公式【曾清凉等,1999】來解釋。因為要修正時 間誤差一般以ε
來修正,而接收儀大部分會記錄其時鐘偏移量,並在定位的過程 中加以修正,故其影響不大,但內部頻率穩定度 a1 並不會紀錄修正。所以要是 內部頻率穩定度較差的話,在解算的過程中因為難以有效的修正,故其影響定位 之精度較大。七、結論及後續建議
本研究所使用之 GPS 接收儀出廠的時間不同,儀器新舊程度及其維護的好 壞不一。A 型所安置的樁位對空通視較佳,而C 型、D型及 E 型這三部儀器在 進行測試時儀器放置在室外,儀器本身的溫度較高。在定位精度評估時並未將這 些因素考慮進去,這些差異亦有可能會對於定位成果產生影響。 雖然本文所使用的儀器在坐標重現性的定位精度有些許的差異,但整體來說 各儀器的定位精度皆有符合內政部所訂的 GPS 衛星點測量規範的要求。因此, 本文所進行的測試僅供使用者對儀器的性能有初步的瞭解,所獲得的結果也僅僅 只是代表本研究的案例,不能代表所有的儀器。若要做更精確的評估,則需要更 多的實驗資料以增進其可靠度。 本研究採用了五項GPS觀測資料品質指標,來分析GPS觀測資料品質與基 線解算精度之相關性,依據第四章的資料處理及結果分析,在此提出以下幾項結 論及建議:1. 整體來看,在本文的所研究的五項指標,以接收儀內部時鐘頻率穩定度(fp) 影響定位精度為最大,次之為週波脫落(o/slps)及多路徑效應(MP1,MP2), 最後則為接收儀內部時鐘偏移量(tp)。 2. 接收儀內部頻率穩定度之好壞遠比其內部時鐘偏移量之大小來得重要,主要 原因是可能是因為接收儀大部分會記錄其時鐘偏移量,並在定位的過程中加 以修正,故其影響不大。但若其內部頻率穩定度較差的話,在解算的過程中 難以有效的修正,故其影響定位之精度較大。 3. 本研究中各接收儀的定位精度,除了B型儀器在長、中距離精度上較為突出 外,大致符合上述規律,這或許是因為還有會影響 GPS 定位的指標沒被考 慮到。 4. 本研究中因為實驗場地位於屋頂,所以導致週波脫落及多路徑效應的影響不 大。後續研究可考慮在不同的場地架設同型號或不同型號的儀器,如此一來 可提高週波脫落及多路徑效應的大小,可以了解大概多大的週波脫落及多路 徑效應會對定位精度產生影響,相信對於檢定指標的研究能有更大的幫助。
八、參考文獻
曾清涼、儲慶美(1999)。GPS衛星測量原理與應用,第二版,成大衛星資訊研 究中心,台南。 陳春盛,李旭志,1999。“多路徑效應對 GPS 定位影響之研究”,第十八屆測 量學術及應用研討會論文集,第87~96頁。 陳春盛,陳正唐,2001。“小波理論應用於週波脫落的偵測”, 第二十屆測量學 術及應用研討會論文集,第373~380頁。 李瓊武、葉大綱、王傳盛、張明偉,2002。全球定位系統接收儀校正系統建立之 探討,測量工程,第44卷,第1期,pp.25~36。 葉大綱、王傳盛、李瓊武,2002。GPS觀測資料品質影響相對定位精度之研究, 地籍測量,第21卷,第2期,pp.14~27。 葉大綱、李瓊武、陳春盛,2003。由未差分的 GPS 相位資料推求接收儀時錶誤 差之研究,地籍測量,第22卷,第2期,pp.20~32。Beutler G., E. Brockmann, R. Dach, P. Fridez, W. Gurtner, U. Hugentobler, J. Johnson, L. Mervart, M. Rothacher, S. Schaer, T. Springer, R. Weber (2000). Bernese GPS Software Version 4.2, Astronomical Institute, University of Berne.
Chen C.C., T.K. Yeh (2002). A Study on Enhancing Precision of GPS Positioning Using the Short Range Distance Baseline Field, Journal of Surveying Engineering, American Society of Civil Engineering, Vol.128, No.1, pp.21~38. UCAR UNAVCO Facility (2002), Boulder, Colorado, http://www.unavco.ucar.edu/. Leick A. (1995). GPS Satellite Survey, Second Edition, JOHN WILEY & SONS, New