雙選擇性通道中基於期望值最大化之正交分頻多工系統接收機的設計與模擬
79
0
0
全文
(2) 雙選擇性通道中基於期望值最大化之正交分頻多工系統 接收機的設計與模擬 Design and Simulation of EM-Based Receivers for OFDM Systems in Doubly Selective Channels. 研 究 生:陳文娟. Student:Wen-Chuan Chen. 指導教授:黃家齊. Advisor:Dr. Chia-Chi Huang. 國 立 交 通 大 學 電 信 工 程 學 系 碩 士 班 碩 士 論 文. A Thesis Submitted to Department of Communication Engineering College of Electrical Engineering and Computer Engineering National Chiao Tung University in Partial Fulfillment of the Requirements for the Degree of Master of Science in Communication Engineering August 2008 Hsinchu, Taiwan, Republic of China. 中華民國 九十七 年 八 月.
(3) 雙選擇性通道中基於期望值最大化之正交分頻多工系統 接收機的設計與模擬. 學生:陳文娟. 指導教授:黃家齊 博士. 國立交通大學電信工程學系 碩士班. 摘. 要. 正交分頻多工系統(Orthogonal Frequency Division Multiplexing, OFDM)之載 波間干擾(Inter-carrier Interference, ICI)效應會隨著車速提高而越益嚴重。本 論文針對此問題,提出兩種遞迴式接收機來抑制載波間干擾,第一種為基 於 期 望 值 最 大 化 (Expectation-Maximization, EM) 之 最 大 相 似 度 判 定 (Maximum Likelihood, ML)接收機,另一種則為加入迴旋編碼之基於期望值 最大化渦輪式(Turbo-EM)接收機。首先,分析訊號載波間干擾效應的頻域 模型,並結合期望值最大化演算法及載波間干擾消除來進行遞迴式的通道 統計特性估測與資料偵測,以達到最大相似度判定準則,此為 ML-EM 接收 機。然而,ML-EM 接收機雖可改善使用一階等化器(One-tap Equalizer)的錯 誤率,在高訊雜比(SNR)時還是會有明顯的錯誤基底(error floor),為了解決 此問題,我們提出一加入編碼的 Turbo-EM 接收機,此接收機使用最大後置 機率判定之期望值最大化(MAP-EM)演算法,並利用雙向軟式輸出維特比演 算法(Bi-directional Soft Output Viterbi Algorithm, Bi-SOVA)來提供 MAP-EM 所需的傳送訊號之事前機率,在通道平均值已知的情況下,Turbo-EM 接收 機 可 明 顯 縮 減 ML-EM 接 收 機 在 高 正 規 化 都 卜 勒 頻 率 (>0.1) 時 與 理 想 ML-EM(假設傳送資料已知)間的差距,使兩者之間的效能更貼近。 i.
(4) Design and Simulation of EM-Based Receivers for OFDM Systems in Doubly Selective Channels. Student:Wen-Chuan Chen. Advisor:Dr. Chia-Chi Huang. Department of Communication Engineering National Chiao Tung University ABSTRACT In mobile environments, time-variant channels will cause inter-carrier interference (ICI) in orthogonal frequency division multiplexing (OFDM) system, thus severely degrade the system performance. This thesis proposes two expectation-maximization (EM)-based iterative receivers to deal with the ICI problem. First, an ML-EM receiver is developed to reduce the computational complexity, the main idea of which is to combine the EM algorithm with a groupwise ICI cancellation method for iterative data detection and channel estimation. The receiver effectively improves the bit error rate (BER) performance of the conventional one-tap equalizer, but the performance degradation compared with the perfect case (assuming both average channel gain and transmitted data symbol we known) is still considerable. We then investigate an EM-based turbo receiver for OFDM systems with outer channel coding, called a Turbo-EM receiver. Based on the MAP-EM receiver structure, this receiver employs a bi-directional soft-output viterbi algorithm (Bi-SOVA) to exchange soft information with a maximum a posteriori (MAP)-EM algorithm by using the turbo principle. Compared with the ML-EM receiver, our simulation results show that the Turbo-EM receiver significantly improves the BER performance, and its performance is more close to the perfect case, under relatively high normalized Doppler frequency(>0.1). ii.
(5) 致謝 在這兩年的研究期間,首先要感謝我的指導教授黃家齊教授的耐心與指導,並且在 學業與平日待人處事上給予最寶貴真誠的意見,使得我更具有信心面對挑戰和考驗。 同時,由衷感謝黃正光教授與陳紹基教授,在百忙之中抽空審閱學生論文並擔任口 試委員,口試時也提供我許多寶貴的意見,使學生論文更加完備。 本論文得以完成,特別要感謝實驗室古孟霖學長不辭辛苦的解答我的問題與疑惑, 並在程式、論文上給予諸多指導,更讓我了解此研究在通訊領域上的相關問題與應用。 另外,也很感謝博士班香君、慈惠學姊等諸多學長姊在學業上的幫忙與指導。當然也要 感謝一起來到這間實驗室的同學裕威、建勳、思潔平時在課業上的幫助,以及曉顗、王 森、人豪平時的幫忙與打氣,謝謝大家在這段期間對我的照顧與鼓勵。 最後要感謝的是我的家人及朋友對我的包容及支持,有你們無條件的付出與加油, 才可以讓我無後顧之憂的專心課業,在此我獻上最誠摯的祝福和感謝。. iii.
(6) 目錄 中文摘要 ............................................................................................................... i 英文摘要 .............................................................................................................. ii 致謝 ....................................................................................................................iii 目錄 .................................................................................................................... iv 圖目錄 ................................................................................................................ vi 第一章 緒論 ......................................................................................................... 1 1.1. 研究動機與目的 ...................................................................................................1. 1.2. 文獻回顧與研究方法 ...........................................................................................2. 1.3. 章節提要 ...............................................................................................................3. 第二章 正交分頻多工系統 ................................................................................. 5 2.1. IEEE 802.16e標準................................................................................................5 2.1.1. 訊框格式 ...................................................................................................5. 2.1.2. 迴旋編碼器(Convolutional Encoder).....................................................6. 2.1.3. 區塊交錯編排器(Block Interleaver).......................................................6. 2.2. 雙選擇性通道模型 ...............................................................................................7. 2.3. 接收訊號之推導與分析 .......................................................................................9. 2.4. 載波間干擾之頻域模型建構 ............................................................................. 11. 第三章 資料偵測與載波間干擾消除方法....................................................... 16 3.1. 期望值最大化之最大相似度判定資料偵測方法 .............................................17 3.1.1. E步驟與M步驟.......................................................................................20. 3.1.2. 通道統計特性推導 .................................................................................22. iv.
(7) 3.1.3 3.2. 初始化設定 .............................................................................................27. 以群式載波間干擾消除實現 .............................................................................28. 第四章 基於期望值最大化之渦輪式接收機................................................... 33 4.1. 雙向軟式輸出維特比演算法(Bi-SOVA)解碼簡介...........................................35. 4.2. 渦輪式資料偵測方法 .........................................................................................38. 第五章 電腦模擬 ............................................................................................... 43 5.1. 模擬參數 .............................................................................................................43. 5.2. 模擬結果 .............................................................................................................44. 第六章 結論 ....................................................................................................... 66 參考文獻 ............................................................................................................ 67. v.
(8) 圖目錄 圖 2.1 正交分頻多工系統子載波配置之頻率描述 ...............................................................5 圖 2.2 迴旋編碼器 ...................................................................................................................6 圖 2.3 區塊交錯編排器示意圖 ...............................................................................................7 圖 2.4 多重路徑之時變等效基頻脈衝響應的一個例子 .......................................................8 圖 2.5 OFDM系統基頻等效模型............................................................................................9 圖 2.6 顯示 Φ 簡化前後的誤差,載波間間隔 ( ( k − m ) ) N 分別為(a)1~255、(b)1~30、 (c)100~130、(d)225~255........................................................................................................14 圖 3.1 ML-EM 傳送端與接收機之架構圖..........................................................................16 圖 3.2 EM演算法之流程圖 ...................................................................................................19 圖 3.3 通道統計特性 ..............................................................................................................23 圖 3.4 ML-EM演算法之流程................................................................................................26 圖 3.5 都卜勒擴散示意圖 .....................................................................................................29 圖 3.6 ML-EM接收機運作流程圖........................................................................................32 圖 4.1 Turbo-EM傳送端與接收機之架構圖 ........................................................................33 圖 4.2 Turbo-EM接收機運作流程圖 ....................................................................................42 圖 5.1 FdT = 0.05、G = 1 在通道狀態資訊及傳送資料已知情況下,(P,Q)不同組合的效能。 (P,Q)={(2,1),(3,2),(4,3),(5,4)} ................................................................................................46 圖 5.2 FdT = 0.05、G = 2 在通道狀態資訊及傳送資料已知情況下,(P,Q)不同組合的效能。 (P,Q)={(2,1),(3,2),(4,3)} .........................................................................................................46 圖 5.3 FdT = 0.05、G = 4 在通道狀態資訊及傳送資料已知情況下,(P,Q)不同組合的效能。 (P,Q)={(2,1),(3,2),(4,3)} .........................................................................................................47 圖 5.4 FdT = 0.1、G = 1 在通道狀態資訊及傳送資料已知情況下,(P,Q)不同組合的效能。 (P,Q)={(3,2),(5,4),(7,6),(9,8)} ................................................................................................47. vi.
(9) 圖 5.5 FdT = 0.1、G = 2 在通道狀態資訊及傳送資料已知情況下,(P,Q)不同組合的效能。 (P,Q)={(3,2),(5,4),(7,6)} .........................................................................................................48 圖 5.6 FdT = 0.1、G = 4 在通道狀態資訊及傳送資料已知情況下,(P,Q)不同組合的效能。 (P,Q)={(3,2),(5,4),(7,6)} .........................................................................................................48 圖 5.7 FdT = 0.05、G = 4、(3,2),ML-EM接收機有無使用ICI消除機制的差異 ............50 圖 5.8 FdT = 0.1、G = 4、(5,4),ML-EM接收機有無使用ICI消除機制的差異 ..............50 圖 5.9 FdT = 0.05、(3,2),不同大小的G對錯誤率的影響 .................................................51 圖 5.10 FdT =0.1、(5,4),不同大小的 G 對錯誤率的影響 .................................................52 圖 5.11 FdT = 0.05 在估測的情況下,不同G與(P,Q)的組合對錯誤率的影響。 ............52 圖 5.12 FdT = 0.05、G = 1、(3,2)在三種情況下的錯誤率比較。 .....................................54 圖 5.13 FdT = 0.05、G = 2、(3,2)在三種情況下的錯誤率比較。 .....................................54 圖 5.14 FdT = 0.05、G = 4、(3,2)在三種情況下的錯誤率比較。 .....................................55 圖 5.15 FdT = 0.1、G = 1、(5,4)在三種情況下的錯誤率比較。 .......................................55 圖 5.16 FdT = 0.1、G = 2、(5,4)在三種情況下的錯誤率比較。 .......................................56 圖 5.17 FdT = 0.1、G = 4、(5,4)在三種情況下的錯誤率比較。 .......................................56 圖 5.18 FdT = 0.1、G = 2、(5,4)在通道狀態資訊及傳送資料已知下的位元錯誤率(BER)。 ..................................................................................................................................58 圖 5.19 FdT = 0.1、G = 2、(5,4)在通道狀態資訊已知下的位元錯誤率(BER)。 .............58 圖 5.20 FdT = 0.1、G = 2、(5,4)在通道狀態資訊為估測的位元錯誤率(BER)。 .............59 圖 5.21 FdT = 0.1、G = 2、(5,4)在三種不同情況下的位元錯誤率(BER)。 .....................59 圖 5.22 FdT = 0.1、G = 2、(5,4)在通道狀態資訊及傳送資料已知下的訊框錯誤率(FER)。 ..................................................................................................................................60 圖 5.23 FdT = 0.1、G = 2、(5,4)在通道狀態資訊已知下的訊框錯誤率(FER)。 .............60 圖 5.24 FdT = 0.1、G = 2、(5,4)在通道狀態資訊為估測的訊框錯誤率(FER)。 .............61 圖 5.25 FdT = 0.1、G = 2、(5,4)在三種不同情況下的訊框錯誤率(FER)。 .....................61. vii.
(10) 圖 5.26 FdT = 0.1、G = 4、(5,4)在通道狀態資訊及傳送資料已知下的位元錯誤率(BER)。 ..................................................................................................................................62 圖 5.27 FdT = 0.1、G = 4、(5,4)在通道狀態資訊已知下的位元錯誤率(BER)。.............62 圖 5.28 FdT = 0.1、G = 4、(5,4)在通道狀態資訊為估測的位元錯誤率(BER)。.............63 圖 5.29 FdT = 0.1、G = 4、(5,4)在三種不同情況下的位元錯誤率(BER)。.....................63 圖 5.30 FdT = 0.1、G = 4、(5,4)在通道狀態資訊及傳送資料已知下的訊框錯誤率(FER)。 ..................................................................................................................................64 圖 5.31 FdT = 0.1、G = 4、(5,4)在通道狀態資訊已知下的訊框錯誤率(FER)。 .............64 圖 5.32 FdT = 0.1、G = 4、(5,4)在通道狀態資訊為估測的訊框錯誤率(FER)。 .............65 圖 5.33 FdT = 0.1、G = 4、(5,4)在三種不同情況下的訊框錯誤率(FER)。 .....................65. viii.
(11) 第一章 緒論 1.1 研究動機與目的 近幾年來,行動通訊科技發展極為迅速,各類無線通訊不斷地發展更新,而隨著人 們對於資料傳輸率的需求,寬頻通訊已經成為無線通訊技術發展的必然趨勢。無線網路 具有移動性、便利性以及高覆蓋性的優點,使得人們的通訊聯繫不再受時間及地點的約 束,但相對的,無線通道的環境是非常惡劣的,除了嚴重的雜訊干擾之外,通道多路徑 效應(Multipath Effect)的影響更是無線通訊中極欲克服的問題。此效應將會使訊號造成頻 率選擇性衰減(Frequency Selective Fading),產生符碼間干擾(Inter-Symbol Interference, ISI),迫使傳輸品質嚴重受損,大大地降低了系統的性能,因此如何依據環境的限制與 傳輸的需求來選擇最適宜的通訊系統架構在系統工程乃是一極為重要的課題。 現今無線通訊系統,為了提高頻寬的使用率以及對抗通道多路徑效應的影響,許多 新穎的技術應運而生,其中最著名的即是採用多載波傳送訊號的正交分頻多工系統 (Orthogonal Frequency Division Multiplexing, OFDM)。OFDM 系統採用平行資料傳輸以 及頻帶之間彼此正交重疊的方式來有效利用頻寬、增加頻寬效益,並利用子載波間彼此 正交的特性,來消除多路徑造成的干擾。因此許多的通訊系統都採用 OFDM 作為實體 層的調變方式[1][2]。. 1.
(12) OFDM 系統主要特性如下: (1). OFDM 可有效地解決多路徑(multipath)的問題,藉由保護區間(guard interval)與循環 延展(cyclic extension)的設計,簡單地克服多路徑的問題。. (2). OFDM 對於窄頻干擾有較強的抵抗能力。. (3). OFDM 具有子載波正交性,可以避免子載波間的干擾(Inter-Carrier Interference, ICI)。 然而,通訊系統的傳收機不單是只應用於靜止的環境,也要考慮能在高移動之行動. 通訊環境裡提供良好的傳輸,其可靠度方為所需,而高移動性會造成都卜勒頻率擴散 (Doppler Spread),亦即時間選擇性(Time-Selectivity),是 OFDM 的一大致命傷。因在一 個 OFDM 符碼期間通道時變會破壞子載波之間的正交性,導致能量洩漏到相鄰的數個 子載波上,即為 ICI,造成效能降低,此效應隨著車輛速度、載波頻率及 OFDM 符碼長 度的增加,對系統效能影響越益嚴重。因此,對抑制 ICI 效應期能改善效能正是目前通 訊界許多研究者努力的研究課題,也是本論文的研究目的。. 1.2 文獻回顧與研究方法 目前已存在許多用來抑制由時變通道造成的 ICI 效應的演算法。如:最小均方差 (Minimum mean square error, MMSE)[3]、最小均方差之序列式偵測(Minimum mean square error with successive detection, MMSE-SD)[3] 、 多 項 式 消 除 編 碼 (Polynomial cancellation coding, PCC)[4]、自我消除方法(self-cancellation scheme)[5]。論文[3]的方法. 2.
(13) 擁有好的效能,但當 OFDM 子載波數目大,所需的運算複雜度相當高,因而提出[4]、 [5]來改善,但此兩種方法卻必須犧牲頻寬效益來獲得低錯誤率。 論文[6]、[7]提出了以片段方式(Piece-Wise)線性模型去近似通道變化,並利用此特性 來分析、了解 ICI 的特性。[8] 及[9]說明了都卜勒擴散效應會造成訊號能量往外洩露到 鄰近的數個子載波上。在本論文中,以[6]、[7]、[8] 及[9]為基礎,使用線性模型來近似 通道變化,整理得到一 ICI 的頻率域模型,並使用[10]、[11]介紹之期望值最大化 (Expectation-Maximization, EM)演算法來進行遞迴式的通道統計特性估測與資料偵測, 以達到資料偵測之最大相似度判定(Maximum likelihood, ML)的準則。接著以最大相似度 判定之期望值最大化 (ML-EM)及最大後置機率判定之期望值最大化(MAP-EM)演算法 設計出兩種接收機來抑制 ICI 的效應,分別為基於期望值最大化之最大相似度判定 (ML-EM)接收機及基於期望值最大化之渦輪式(Turbo-EM)接收機。. 1.3. 章節提要 根據我們的研究目的「有效抑制 ICI 並改善系統效能」 ,在第二章首先介紹基本的系. 統架構,並建構 ICI 的頻率模型,利用此模型作為之後接收機設計及 ICI 消除的依據。 第三章我們設計一 ML-EM 接收機,首先使用安插在一 OFDM 符碼間的領航碼(pilot) 進行通道估測,得到通道平均增益值並使用一階等化器(One-tap Equalizer)進行資料偵測 來獲得 EM 的初始值,利用此初始值求得 E 步驟所需之條件機率期望值,並使用竭盡式 搜尋法(exhaustive search)找一組可能的資料使 E 步驟最大化,經過數次遞迴直至搜尋的. 3.
(14) 資料收斂即可得到一組通道統計特性及估測之傳送訊號,可用來進行 ICI 消除得到一新 的接收訊號,再與前一次 EM 演算法收斂得到之傳送訊號當作初始值送入 EM 演算法進 行下一次的遞迴運算。 第四章則是為了改善第三章效能的不足而設計一 Turbo-EM 接收機,此接收機由 MAP-EM 及雙向軟式輸出維特比演算法(Bi-directional Soft Output Viterbi Algorithm, Bi-SOVA)所組成,MAP-EM 所需的資訊較 ML-EM 多了估測參數的事前機率,故使用 Bi-SOVA 來提供每個傳送資料的事前機率,並利用 Bi-SOVA 回授的資料作為 EM 演算 法的初始值。 第五章則分別呈現了 ML-EM 接收機與 Turbo-EM 接收機於電腦上的模擬參數設定 及結果,我們將針對其結果進行分析與說明。 最後我們將在第六章總結整篇論文,說明完成的研究工作、得到的研究成果以及做 出的研究貢獻。. 4.
(15) 第二章 正交分頻多工系統 2.1 IEEE 802.16e 標準 2.1.1 訊框格式 IEEE 802.16e OFDM[11]調變之訊框格式(Frame format),每個訊框的第一個 OFDM 符碼是領航前導(Pilot preamble),其後接著數個資料符碼,每個 OFDM 子載波配置之頻 率描述如圖 2.1。 每個 OFDM 符碼由數個子載波組成,其數目由快速傅立葉轉換(Fast Fourier Transfer, FFT)的長度所決定。每個 OFDM 符碼皆擁有三種型態的子載波: -. 資料(Data)子載波:負載傳輸之資料。. -. 領航(Pilot)子載波:可用來協助做各方面的估測(如通道估測)。. -. 無效(Null)的子載波:保護頻帶(Guard Band)與 DC 子載波,不用來傳輸。. 圖 2.1 正交分頻多工系統子載波配置之頻率描述. 在 OFDM 資料符碼中,等間隔插入八個固定值[-1 -1 1 1 -1 1 -1 1]之 BPSK 領航碼, 其傳送功率相對於傳送資料提高了 3dB。在本論文中,傳送資料也是採用 BPSK 調變。. 5.
(16) 2.1.2 迴旋編碼器(Convolutional Encoder) 在本論文中,我們採用 IEEE 802.16e 中的迴旋編碼器,其產生多項式使用 G1 = 171OCT 及 G2 = 133OCT ,內含 6 個暫存器,編碼率 R 為 1/2,如圖所示。. + Data in. Tb. + Tb. +. +. Tb +. Tb +. Tb. Encoder output. Tb +. X output. +. Y output. 圖 2.2 迴旋編碼器. 從圖 2.2 中可以看出此編碼器為一個輸入兩個輸出,故編碼率為 1/2。另外,規格書 中有提供其他的編碼率(2/3、3/4 及 5/6),其產生方式就必須搭配穿刺(puncturing)之技術。 而本論文接收端的部份是使用雙向軟式輸出維特比演算法(Bi-directional Soft Output Viterbi Algorithm, Bi-SOVA)來進行解碼。. 2.1.3 區塊交錯編排器(Block Interleaver) 為了避免編碼後之訊號經過通道可能造成連續性的錯誤,而無法使用錯誤更正碼修 正,故採用一架構簡單之區塊交錯編排器,將相鄰的位元打散到不同的位置上,以提升 迴旋編碼的效益。區塊交錯編排器為產生一 N × M 矩陣,將編碼資料由左自右一列一列 的寫入交錯編排器,再由上至下一行一行的讀取出來,如下圖所示。. 6.
(17) 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 11. 4. 8. 12. Interleaving Input 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 6. 10. 3. 7. Output. 1. 5. 9. 2. 圖 2.3 區塊交錯編排器示意圖. 接收端使用之反交錯編排器(De-Interleaver)操作方式恰好相反,將接收到的訊號先 由上至下一行一行的寫入,再由左至右一列一列的讀取出來送入解碼器。. 2.2 雙選擇性通道模型 高資料率傳輸行動通訊環境為多路徑時變通道(Multipath Time-variant Channel),即 所謂的雙選擇性通道(Doubly Selective Channel)[12],其具有頻率選擇性(Frequency Selective)與時間選擇性(Time Selective)的特性。頻率選擇性是由多路徑衰減所造成的; 時間選擇性則是因傳送端與接收端相對高速移動下所造成的通道時變性。 多路徑衰減是因為不同路徑到達時間不同而造成,可稱為時間延遲擴散(time-delay spread)。當通道之同調頻寬(Coherence bandwidth, BC )小於傳送訊號頻寬 BT ,則稱該通 道為「頻率選擇性衰減(frequency-selective fading)通道」,其中同調頻寬為通道保持固定 增益與線性相位的頻寬範圍。. 7.
(18) 通道時變性是因收發端相對位置的移動產生都卜勒效應而發生的,會造成訊號頻率 的偏移,又稱都卜勒偏移(Doppler shift)或都卜勒擴散(Doppler spread)。當通道之同調時 間(Coherence time, TC )小於傳送訊號的符碼區間(Symbol duration, T ),即通道在符碼區 間內變動很快,稱此通道為「快速衰減(fast fading)通道」 。 雙選擇性通道即是多路徑時變通道,或稱為頻率選擇性快速衰減通道,其等效複數 基頻脈衝響應可用下面的數學式子來描述: h ( t ,τ ) = ∑ α l ( t ) δ (τ − τ (l ) ) L. (2.1). l =1. 其中 α l ( t ) 與 τ ( l ) 為第 l 根路徑的複數衰減增益及路徑延遲,路徑之複數衰減增益為隨時 間而改變,t 為時間索引, L 為路徑個數, δ 為脈衝函數(Kronecker delta function)。假設 Ts 為取樣週期,則離散時間通道時變脈衝響應 h[l , n] 表示在第 l 根路徑 t = i × Ts 瞬間第 n 個取樣點之增益。下圖為說明多路徑之時變離散等效基頻脈衝響應的一個例子[14]。. t h ( t ,τ ). t3. τ ( t3 ). t2. τ ( t2 ). t1 t0. τ0. τ ( t1 ) τ1. τ2. τ3. τ4. τ N −2 τ N −1. τ ( t0 ). 圖 2.4 多重路徑之時變等效基頻脈衝響應的一個例子. 8.
(19) 路徑增益 α l (t ) 變化速度由最大都卜勒頻率(Maximum Doppler frequency, Fd )或都卜 勒擴散所決定,與載波頻率及車速呈現正比關係,當最大都卜勒頻率越大,通道增益值 的變異就越大,而最大都卜勒頻率定義如下. Fd =. fcv C. (2.2). 其中 f c 為載波頻率, v 為車速, C 為光速 3 × 10 −8 m / sec 。在 OFDM 系統中,使用正規化 都卜勒頻率(Normalized Doppler frequency, Fd Ts )來描述通道的特性,當作通道變化快慢 的指標。當 f c 與 Ts 固定不變,從(2.2)式可看出當車速愈快, Fd 愈大,即表示通道變化速 度愈快,同調時間愈短。. 2.3 接收訊號之推導與分析. Information Bits. MPSK Modulation. x[0]. X [1]. x[1]. S/P. y[0] y[1]. zi. h[l, n]. P/S. IDFT X[N−1]. yc. AWGN noise. xc. X [0]. +. S/P. DFT y[N−1]. x[N−1]. Y [0] Y [1]. Y[N−1]. 圖 2.5 OFDM 系統基頻等效模型. 圖 2.5 為 OFDM 系統基頻等效模型,將有效傳輸頻寬分為 N 個彼此正交的子載波 來做傳輸,在傳送端,我們將經過調變的資料送入反離散傅立葉轉換(Inverse Discrete Fourier Transform, IDFT)機制可得到傳送的時域訊號表示如下:. x[n] =. 1 N. N −1. ∑ X [m]e. m=0. 9. j. 2π mn N. (2.3).
(20) 其中 X [m] , m = 0,. , N − 1 為第 m 個子載波裡的傳送頻域訊號。為了避免多路徑通道造. 成符碼間干擾(Inter-Symbol Interference, ISI),在每個傳送的 OFDM 符碼前端加上循環字 首(Cyclic Prefix, CP)作為保護區間. xc [ n] = x [ N + n ] ,. n = − N G ,… , −1. (2.4). 其中 N G 為保護區間的長度。在本論文中假設通道最大延遲擴散總是小於等於 N G ,才能 確保移除循環字首後,不會存在符碼間干擾的問題。 傳送訊號經過時變通道傳輸,並假設接收端時序及載波頻率都已做好完全同步的條 件下,時域上的接收訊號在移除循環字首後可表示成傳送訊號與通道脈衝響應之循環迴 旋(Circular Convolution)的關係,如下所示: y[n] = x[n] ⊗ h[l , n] + z[n] L. = ∑ h[l , n]x[((n − l )) N ] + z[n]. (2.5). l =1. 其中 h[l , n] 為第 l 根路徑在第 n 個取樣時間的複數增益,l ( l = 0,… , L − 1 )為第 l 根路徑相對 第一根觀察路徑的延遲時間、 n 為時間索引, z[ n] 是期望值為 0、變異數為 σ z2 的高斯白 雜訊(Additive White Gaussian Noise, AWGN), ((i)) N 為以 N 為基底之循環位移(Circular Shift)。 經離散傅立葉轉換(Discrete Fourier Transform, DFT)進行正交分頻多工系統的訊號 解調,頻域上接收訊號可表示為:. 10.
(21) N −1. Y [ k ] = ∑ H [ k , m] X [ m] + Z [ k ] m=0. = H [k , k ] X [k ] +. N −1. ∑. m = 0, m ≠ k. H [ k , m] X [ m] + Z [ k ]. (2.6). ICI term. 其中 H [ k , k ] 為通道平均增益值之頻率響應, H [ k , m ] 為第 m 個子載波對第 k 個子載波的 干擾係數,表示如下 L −1. H [ k , m] = ∑ α [ k , m, l ] e. −j. 2π ml N. (2.7). l =0. 與. α [k , m, l ] =. 1 N. N −1. ∑ h[l , n]e. −j. 2π n (( k − m )) N N. (2.8). n =0. 其中 α [ k , m, l ] 為時變通道頻率響應, H [ k , m ] 則可視為 α [ k , m, l ] 乘上每根路徑延遲造成的 線性相位的和。當通道複數增益在一 OFDM 符碼區間內不變, H [ k , m ] 在 k ≠ m 的情況 下皆為 0, H [ k , m] = H [ k , k ] ,即表示在慢速衰減(slow fading)情況下,載波間不會有干 擾發生。. 2.4 載波間干擾之頻域模型建構 在本論文中,我們假設通道的每根路徑在一 OFDM 符碼區間內複數增益近似線性 變化[7]:. h[l , n] = a[l ,1]n + a[l , 0]. (2.9). 其中 a[l , p ] 為第 l 根路徑中 p 次方項的複數係數。因此 α [ k , m, l ] 可運算在以下兩種情況:. 11.
(22) (i) m = k :. α [ k , m, l ] =. N −1 a [l ,1] + a [l , 0] 2. (2.10). (ii) m ≠ k :. α [ k , m, l ] = Φ [ k , m] a [l ,1]. (2.11). 其中. Φ [ k , m] =. 1 N. N −1. ∑ ne. −j. 2π n ( k − m ). n=0. N. 1 =− + j 2. 1. ⎛ π (( k − m)) N 2 tan ⎜ ⎜ N ⎝. ⎞ ⎟ ⎟ ⎠. (2.12). 接著,我們使用麥克勞林級數(Malcaurin series)簡化(2.12)式中的正切函數 ⎛ π π⎞ (tangent function)。由麥克勞林級數得知,當一參數 x 介於 ⎜ − , ⎟ 之間,其正切函 ⎝ 2 2⎠. 數 tan( x ) 可展開成一元多項式 1 2 tan x = x + x3 + x 5 + ........ 3 15. 當 x < 1,高次項( x 3 , x 5 ,. (2.13). )的值很小,可忽略不計,(2.13)式可近似如(2.14)式. tan x ≈ x. (2.14). 在本論文中,m 與 k 的範圍皆從 0 到 N-1,則 1 ≤ ( ( k − m ) ) N ≤ N − 1,因此(2.12). 式中. π (( k − m ))N N. π (( k − m ))N N. ⎡ π π ( N − 1) ⎤ 的範圍介於 ⎢ , ⎥⎦ 或 ( 0, π ) , 依 據 麥 克 勞 林 級 數 可 將 N ⎣N. 的範圍分三個部份來看並加以簡化. 12.
(23) (i). 當. π ((k − m)) N N. =. π 2. ,即 ( ( k − m ) ) N =. N , 2. 1 ⎛π ⎞ 因 tan ⎜ ⎟ 無意義,可得知 Φ [ k , m ] = − 。 2 ⎝2⎠. (ii) 當 0 <. π ((k − m)) N N. <. π 2. ,即 1 ≤ ( ( k − m ) ) N <. N , 2. 1 N 符合麥克勞林級數的範圍,則 Φ [ k , m ] = − + j 。 2 2π ( ( k − m ) ) N. (iii) 當. π 2. <. π (( k − m)) N N. 移 π ,可得到 −. π 2. < π ,因 tan ( x ) = tan ( x − π ) 的特性,故將. <. π ((k − m)) N N. 往左平. π ⎡⎣( ( k − m ) ) N − N ⎤⎦ < 0 以符合麥克勞林級數的範圍,即 N. 1 N N 。 < ( ( k − m ) ) N ≤ N − 1 ,則 Φ [ k , m ] = − + j 2 2 2π ⎡⎣( ( k − m ) ) N − N ⎤⎦ 將(i)~(iii)簡化的結果帶入(2.12)式可得到在 m ≠ k 時, Φ [ k , m] 可整理如下. 1 N ⎧ j − + ⎪ 2 2π ((k − m)) N ⎪ 1 ⎪ Φ[k , m] = ⎨ − 2 ⎪ 1 N ⎪ ⎪− 2 + j 2π [((k − m)) − N ] N ⎩. for 0 < ((k − m)) N < for ((k − m)) N = for. N 2. N 2. (2.15). N < ((k − m)) N < N 2. 由圖 2.6 可看出,當 m 與 k 越接近,(2.12)式與(2.15)式的結果很貼近,幾乎沒有誤 差,而當 m 遠離 k 時,由(c)可看出有約 0.1 的誤差值,但訊號擴散到遠處的載波上能量 很小,0.1 的誤差對其來說並沒有嚴重的影響。. 13.
(24) 45. Original function Approximization function. 40 35. Amplitude. 30 25 20 15 10 5 0. 0. 50. 100. 150. 200. 250. ((k-m))N. 45. 45. 1. Origianl function Approximization function. 40. Origianl function Approximization. 0.9 0.8. 35. 30. 20. Amplitude. Amplitude. Amplitude. 0.6 25. Original function Approximization function. 35. 0.7. 30. 0.5. 25 20. 0.4 15. 15. 0.3. 10. 10. 0.2. 5 0. 40. 5. 0.1. 0. 5. 10. 15 ((k-m))N. 20. 25. 30. 0 100. 105. 110. (b). 115 ((k-m))N. 120. 125. 130. 0 225. 230. (c). 235. 240 ((k-m))N. 245. 250. 255. (d). 圖 2.6 顯示 Φ 簡化前後的誤差,載波間間隔 ( ( k − m ) ) N 分別為(a)1~255、(b)1~30、. (c)100~130、(d)225~255. 經由以上簡化 ICI 效應的模型可將式(2.6)重新表示如下 N −1. Y [k ] = H [k , k ] X [k ] + ∑ Φ[k , m]w[m] X [m] + Z [k ]. (2.16). m=0 m≠ k. L −1. 其中我們定義 w [ m] = ∑ a [l ,1] e. −j. 2π ml N. ,為每根路徑的斜率對其所對應的延遲時間做離散. l =0. 傅立葉轉換,為需要估測的係數; Φ 為衰減項,顯示訊號能量集中在本身訊號位置及鄰 近數個子載波上。(2.16)式也可表示成如下的矩陣形式. 14.
(25) Y = HX + Z = ( M + ΦW ) X + Z = MX + Φw + Z. (2.17). ⎡ ⎛ ⎛ N ⎞ ⎛ N ⎞ N ⎞⎤ 0 ⎢ ⎜ −1 + ⎟ ⎜ −1 + ⎟ ⎜ −1 − ⎟⎥ jπ ⎠ ⎝ j 2π ⎠ jπ ⎠ ⎥ ⎝ ⎝ ⎢ ⎢⎛ ⎛ ⎛ N ⎞ N ⎞ N ⎞⎥ ⎢ ⎜ −1 − 0 ⎟ ⎜ −1 + ⎟ ⎜ −1 − ⎟⎥ jπ ⎠ j j π π 2 ⎢⎝ ⎝ ⎠ ⎝ ⎠⎥ ⎢ ⎥ N ⎞ ⎛ N ⎞ 1 ⎢⎛ ⎥ 0 Φ = ⎜ −1 − ⎟ ⎜ −1 − ⎟ ⎥ j 2π ⎠ ⎝ jπ ⎠ 2 ⎢⎝ ⎢ ⎥ ⎛ N ⎞⎥ ⎢ ⎜ −1 + ⎟ ⎢ jπ ⎠ ⎥ ⎝ ⎢ ⎥ ⎢⎛ ⎥ ⎛ N ⎞ ⎛ N ⎞ N ⎞ − + − − 1 1 0 ⎢ ⎜ −1 + ⎥ ⎟ ⎜ ⎟ ⎜ ⎟ jπ ⎠ ⎝ j 2π ⎠ jπ ⎠ ⎝ ⎣⎢ ⎝ ⎦⎥. (2.18). 其 中 Y = ⎡⎣Y [ 0] ,… , Y [ N − 1]⎤⎦ , X = ⎡⎣ X [ 0] ,… , X [ N − 1]⎤⎦ , Z = ⎡⎣ Z [ 0] ,… , Z [ N − 1]⎤⎦ , T. T. T. , w = ⎡⎣ w [ 0] ,… , w [ N − 1]⎤⎦ , { } M = diag {⎡⎣ H [ 0, 0 ] ,… , H [ N − 1, N − 1]⎤⎦ } , Φ 是一 N × N 的循環矩陣 (cyclic matrix) ,如 W = diag ⎡⎣ w [ 0] ,… , w [ N − 1]⎤⎦. T. T. T. (2.18) 式 所 示 , 其 第 ( k , m ) 個 元 素 以 Φ [ k , m] 表 示 , Φ 的 第 ( k , m ) 個 元 素 則 為. Φ [ k , m] X [ m] 。此外, w = Fs , s = ⎡⎣ a [ 0,1] ,… , a [ L − 1,1]⎤⎦ 為通道斜率每根路徑斜率所組 T. 成的向量, F 為離散傅立葉轉換的矩陣,第( m , l ) 個元素值為 F [m, l ] = e. 15. −j. 2π ml M. 。.
(26) 第三章 資料偵測與載波間干擾消除方法 在本文中,我們對 OFDM 系統設計一基於期望值最大化之最大相似度判定(ML-EM) 接收機[15]。在實際的情況下,由於接收端無法得知通道的資訊,因此首先要透過通道 估測方式解出傳送端所發送之訊息,而在本文所使用之 ML-EM 接收機,是將通道資訊 視為遮蔽式的變數,直接使用 ML 的概念進行資料偵測,其基本傳送端與接收端的架構 圖如下所示. BPSK Modulator. X. OFDM Modulator. Outer iteration Inner iteration. OFDM Demodulator. Y. ˆ X. ML-EM Detector. X W. Y. ICI Cancellation. 圖 3.1 ML-EM 傳送端與接收機之架構圖. 16.
(27) ML-EM 接收機為一遞迴式接收機,而裡面所使用之 ML-EM 演算法也是一種遞迴 式 的 運 算 , 故 在 本 論 文 中 , 我 們 稱 ML-EM 演 算 法 內 部 的 運 算 為 內 部 遞 迴 (Inner. iteration),而整個接收機則稱為外部遞迴(Outer iteration)。接著,我們對 ML-EM 接收機 中所使用之 ML-EM 演算、初始設定及 ICI 消除之方法進行詳細介紹。. 3.1 期望值最大化之最大相似度判定資料偵測方法 期望值最大化(Expectation-Maximization, EM)演算法[16][17]起先分別由不同的人研 究發展,直到 1977 年 Dempster et al.將他們歸納在一起並証明演算法的收斂性質,並將 之命名為 EM 演算法。由於 Dempster 的貢獻,自 1977 年後在各方面,如影像處理、通 訊系統,甚至是經濟學、社會學方面都有不少的研究成果。. EM 演算法是利用遞迴的方式來得到系統參數的最大可能估計(Maximum Likelihood Estimation, MLE)或是最大後驗機率(MAP)的技術,而 EM 演算法的命名是為了強調此演 算法是由兩個步驟組成,即為 E 步驟和 M 步驟。E 步驟是 Expectation 的縮寫,表示在 給定觀測資料(observation data)及前一次遞迴得到的估測參數的情況下計算完整資料對 應的條件期望值;M 步驟是 Maximization 的縮寫,利用竭盡式搜尋法(exhaustive search) 列舉出全部可能的答案,一一代入 E 步驟得到的期望值函數,找一組使其最大化的估計 值,接著,利用 M 步驟得到新的參數估計值,再重複 E 步驟與 M 步驟,直到收斂為止。 我們令 Y 為接收端觀察到的資料(observation data),在很多情況下,因為觀察到的 是所有資料的和,而無法得到個別的資料,或觀察的資料有遺失,故 Y 也稱為不完整的. 17.
(28) 資料(incomplete data), w 為遺失或潛伏的資料(在此為通道資訊), Z = (Y, w) 為完整的資 料(complete data), X 為欲從 Y 估測得到的未知參數(在此為每個使用者傳送的訊號)。一 般用來估測參數的方法為最大可能估計,選擇一組 X 使相似性函數 P (Y | X) 最大。在很 多運用上,為了計算方便,我們採用對數相似性函數,定義為 L ( Y | X) = ln P ( Y | X) ,因 ln( x ) 是一嚴格遞增函數,使 P (Y | X) 最大化的 X 也同時能使 L ( Y | X ) 最大化,則最佳化. 之最大可能估計公式描述如下: X ML = arg max L ( Y X ) X. (3.1). = arg max ln ∫ P ( Y w , X ) P ( w ) dw X. (3.1)式中直接運算最大可能估計需要對未知的變數 w 進行積分,而 w 為一多維度的 變數,運算相當複雜,再加上 P ( w ) 是個未知的參數,所以,EM 演算法提出的主要概 念就是克服此問題,利用 E 步驟與 M 步驟之間的遞迴來最大化 L ( Y | X ),得到 ML 的解。. EM 演算法:. (. ). ˆ ( m ) 表示 E 步驟:決定完整資料的對數相似性的條件期望值,以 Ω X Y, X. (. ). (. ). ˆ (m) = E ⎡ L Y, w X ) ⎤⎦ Ω X Y, X ˆ ( m) ⎣ ( w Y,X. (3.2). ˆ ( m ) 最大化 M 步驟:找一 X 使 Ω X Y, X. (. ˆ ( m+1) = arg max Ω X Y, X ˆ ( m) X X. (. ). (3.3). ). ˆ ( m ) 在 X 和 X(m) 皆是連續的,則(3.3)式的最大化步驟保證每一個遞迴過 當 Ω X Y, X 程都可以增強其相似性函數,EM 演算法則會收斂到某一個穩定的點上,但不一定會是. 18.
(29) 此相似性函數的總體最大值(Global Maxima),EM 演算法的流程如圖 3.2 所示:. ˆ ( m ) initialization value Choose X m = 0. E step : ˆ (m) ) Ω(X | Xcurrent = X. M step :. ˆ (m) ) ˆ ( m +1) = arg max Ω(X | X X current = X X. m=m+1 Convergence ?. No. Yes. 圖 3.2 EM 演算法之流程圖. 接著,我們簡述 EM 演算法可以得到 ML 解的理念,由貝式(Bayesian)定理並做對 數運算具有以下的關係式 P ( Y, w X ) = P ( w Y, X ) P ( Y X ). (3.4). L ( Y X ) = L ( Y, w X ) − L ( w Y, X ). (3.5). 19.
(30) (. ). ˆ ( m ) 取期望值,可得知觀察資料的相似性函數與完整資料相似性函 將(3.5)式對 P w Y, X 數有以下的關係式. L ( Y X ) = Ew Y , Xˆ ( m) ⎡⎣ L ( Y, w X ) ⎤⎦ − Ew Y , Xˆ ( m) ⎡⎣ L ( w Y, X ) ⎤⎦. (I). (. 因 M 步驟保證 Ω X(. m +1). ) (. ). ). (. (3.6). ˆ ( m ) ≥ Ω X ( m ) Y, X ˆ ( m) ,則可得知(3.7)式必成立 Y, X. (. ). ˆ ( m+1) ⎤ ≥ E ˆ ( m) ⎤ ⎡ L Y, w X Ew Y , Xˆ ( m) ⎡ L Y, w X ˆ ( m) ⎣ w Y,X ⎣ ⎦ ⎦. (3.7). (II) 由詹森不等式(Jensen’s inequality),我們可以建立下式的關係. (. ). (. ). ˆ ( m+1) ⎤ ≤ E ˆ ( m) ⎤ ⎡ L w Y, X Ew Y , Xˆ ( m) ⎡ L w Y, X ˆ ( m) ⎣ w Y,X ⎣ ⎦ ⎦. (3.8). 依據(I)、(II)可得知經過遞迴後,(3.6)式中 Ew Y , Xˆ ( m) ⎡⎣ L ( w Y, X ) ⎤⎦ 會越來越小,則 L ( Y X ) 由. Ew Y , Xˆ ( m) ⎡⎣ L ( Y, w X ) ⎤⎦ 主導,會越來越大,符合最大可能性估測(3.1)式的描述關係。. (. ) (. ˆ ( m +1) ≥ L Y X ˆ ( m) L YX. ). (3.9). 3.1.1 E 步驟與 M 步驟 EM 演算法在通訊上主要應用在通道估測與資料偵測,而在本論文中,是使用 EM 演算法來估測傳送訊號,而將通道資訊視為潛伏的變數。以下將介紹 EM 演算法中 E 步 驟與 M 步驟的運算過程:. (. ). ˆ (m) = E ⎡ L Y, w X ) ⎤⎦ E 步驟:計算 Ω X Y, X ˆ ( m) ⎣ ( w Y,X. 由貝式定理得知,完整資料的對數相似性函數有 L ( Y, w X ) = L ( Y w , X ) + L ( w ) 的關 係,而 E 步驟是對 w 效應取平均,且 L ( w ) 與 X 無關,不會影響到 M 步驟決策的部份, 20.
(31) 所以實際上 E 步驟只對 L (Y | w, X) 取期望值,而 L( Y | w, X) 展開式中只有 H 與 w 相關,. (. ). (. ). ˆ ( m ) 只針對 H 做運算,可推導以下: 所以 E 步驟的 Ω X Y, X ˆ ( m) = E ⎡ L Y, w X ) ⎤⎦ Ω X Y, X ˆ ( m) ⎣ ( w Y,X = Ew Y , Xˆ ( m) ⎡⎣ L ( Y w, X ) ⎤⎦ ⎡ 1 2⎤ = Ew Y , Xˆ ( m) ⎢ − 2 Y − HX ⎥ ⎣ σz ⎦ 1 = − 2 Y H Y − Y H HX − X H H H Y + X H Σ H X. σz. {. (3.10). }. (. ). ˆ ( m ) 做條件期望 其中我們定義 H = Ew Y , Xˆ ( m) [ H ] 及 Σ H = Ew Y , Xˆ ( m) ⎡⎣ H H H ⎤⎦ ,皆是對 P w Y, X 值,而此條件機率分布函數(PDF)為高斯分佈,由[18]可以得知其統計特性計算如(3.11)、. (3.12)式(使用 Y = MX + Φw + Z ) 期望值(Mean): w. −1 Ew Y , Xˆ ( m) [ w ] = µ w + CwY CYY ( Y − µY ). 變異數(Covariance): Σ w. (3.11). H −1 Ew Y , Xˆ ( m) ⎡( w − w )( w − w ) ⎤ = Cww − CwY CYY CYw ⎣ ⎦. (3.12). H 接著,我們對以上各個符號分別定義, µ Y = E [ Y ] , CYY = E ⎡( Y − µ Y )( Y − µ Y ) ⎤ , ⎣ ⎦ H CwY = E ⎡( w − µ w )( Y − µ Y ) ⎤ ⎣ ⎦. ,. H CYw = E ⎡( Y − µ Y )( w − µ w ) ⎤ ⎣ ⎦. ,. µw = E [w]. 及. H Cww = E ⎡( w − µ w )( w − µ w ) ⎤。在明確地運算出 w 及 Σ w 之前我們必須先得知通道斜率的 ⎣ ⎦. 統計特性 µ w 及 C ww ,其將在 3.1.2 說明。 M 步 驟 : 使 用 竭 盡 式 搜 尋 法 (exhaustive search) 找 出 一 組 X 能 使 E 步 驟 得 到 的. (. ). ˆ ( m ) 最大化。 Ω X Y, X. (. ˆ ( m+1) = arg max Ω X Y, X ˆ ( m) X X. 21. ). (3.14).
(32) 3.1.2 通道統計特性推導 在此我們使用一階自回歸(Autoregressive, AR)模型[19]來運算 µ w 及 C ww ,此 AR 模 型描述如下 h[l , N − 1] = β h[l , 0] + u. (3.13). 其中 u 為期望值是 0 的白雜訊,β 為 AR 模型的參數,即是通道的相關性,從傑克斯(Jake’s) 通道模型可以得知通道的相關性是由都卜勒頻率 Fd 及取樣週期 Ts 所決定,表示如下. β = E ⎡⎣ h[l , N − 1]h*[l , 0]⎤⎦ = J 0 (2π Fd ( N − 1)Ts ). (3.14). 其中 J 0 為 0 階的貝索函數(Bessel function)。此外,由能量守恆定理可以得知 u 的變異數 能由(3.15)式求得. σ u2 = (1 − β 2 ) Ξ l. (3.15). 其中 Ξ l = E ⎡⎣ h 2 [l , n ]⎤⎦ 為第 l 根路徑的通道能量。 在一個 OFDM 符碼區間第 l 根路徑的斜率,可由(3.16)關係式得到. a [l ,1] =. h [l , N − 1] − h [l , 0] ( β − 1) h [l , 0] + u = N −1 N −1. (3.16). 其中因 h [l , 0] 與 u 的期望值為 0,故通道斜率的期望值也必為 0,而在通道路徑彼此獨立 的假設下, E ⎡⎣ a [l ,1] a∗ [l ',1]⎤⎦ = 0 (其中 l ≠ l ' ),通道斜率的變異數則可由通道的相關性、 功率及 OFDM 子載波個數決定。 E ⎡⎣ a [l ,1]⎤⎦ = 0 22. (3.17).
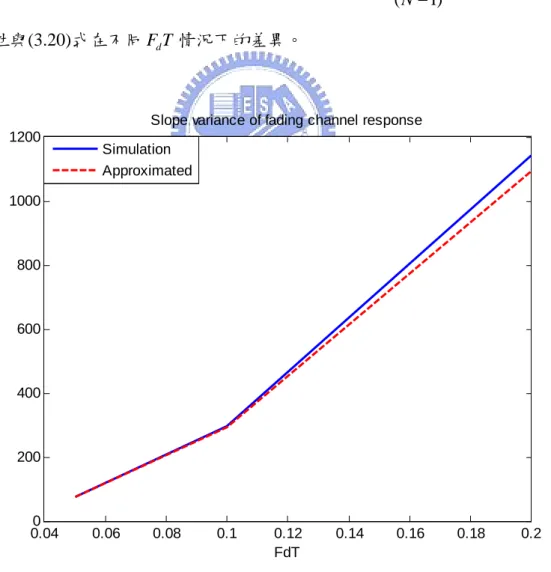
(33) E ⎡⎣ a [l ,1] a∗ [l ,1]⎤⎦ =. ⎡( β − 1)2 Ξl + (1 − β 2 ) Ξ l ⎤ = ⎦ ( N − 1) ⎣ 1. 2 (1 − β ) Ξl. 2. ( N − 1). (3.18). 2. 由(2.17)式中,我們知道 w = Fs ,結合(3.17)及(3.18)的結果可得知其統計特性如下 所示: µw = 0. (3.19). Cww = FCss F H. (3.20). 其中 Css 為一對角線矩陣,對角線上第 l 個元素為 Css [l , l ] =. 2(1 − β )Ξl 。圖 3.3 為實際通道 ( N − 1) 2. 統計特性與(3.20)式在不同 Fd T 情況下的差異。. Slope variance of fading channel response 1200. Simulation Approximated. 1000. 800. 600. 400. 200. 0 0.04. 0.06. 0.08. 0.1. 0.12 FdT. 0.14. 圖 3.3 通道統計特性. 23. 0.16. 0.18. 0.2.
(34) 在一般的情況下,通道平均變化 M 可利用安插在一 OFDM 符碼間的 pilot 估測得 ˆ 表示,而在本論文中所使用的方法於 3.1.3 節中介紹。在此,我們先將(3.19) 到,以 M. 及(3.20)的結果應用在 3.1.1 節中的(3.11)及(3.12)式,將 E 步驟所需的統計特性運算整理 如下:. ˆ ˆ ( m) µ Y = MX. (. (3.21). )(. CYY = E ⎡ Φ( m ) w + Z Φ( m ) w + Z ⎢⎣ (m). = Φ Cww Φ. (. ( m )H. ). H. ⎤ ⎥⎦. (3.22). +σ I 2 z. CwY = Ew ⎡ w Φ( ) w + Z ⎢⎣. ). ⎤ = C Φ( m ) H ww ⎥⎦. (3.23). m m CYw = Ew ⎡ Φ( ) w + Z w H ⎤ = Φ( )Cww ⎣ ⎦. (3.24). (. m. H. ). ˆ 及上一次估測得到的傳送訊號 X ˆ (m) 其中接收訊號 Y 的期望值由通道平均變化估測值 M ˆ ( m ) 所得到的,之中的 C 決定,而 C YY 、C wY 及 C Yw 皆是由通道斜率變異數 C ww 、Φ 及 X YY. 還會受到雜訊功率的影響。接著,我們將(3.19)~(3.24)的結果帶入(3.11)及(3.12)式即可得 ˆ ( m ) 情況下的統計特性。 到通道斜率在給定 Y 及 X −1 w = CwY CYY ( Y − µY ). (3.27). −1 Σ w = C ww − CwY C YY C Yw. (3.28). ˆ ( m ) 帶入 Φ 而得。此外,我們得到 其中 Φ ( m ) 是將 X. ˆ + ΦW ⎤ = M ˆ + ΦW H = Ew Y , Xˆ ( m) ⎡⎣ M ⎦. 24. (3.29).
(35) 其中 W = Ew Y , Xˆ ( m) [ W ] = Ew Y , Xˆ ( m) ⎡⎣ diag {w}⎤⎦ = diag {w} 。. (. ) (. ). H ˆ + ΦW ˆ + ΦW ⎤ Σ H = Ew Y , Xˆ ( m) ⎡ M M ⎢⎣ ⎥⎦ ˆ HM ˆ +M ˆ H ΦW + W H Φ H M ˆ + W H Φ H ΦW ⎤ = Ew Y , Xˆ ( m) ⎡⎣M ⎦. ⎡ ww H )T • ( Φ H Φ ) ⎤ ˆ HM ˆ +M ˆ H ΦW + W H Φ H M ˆ +E =M ˆ ( m ) ⎢( w Y,X ⎣ ⎦⎥ ⎡( ww H )T ⎤ • ( Φ H Φ ) ˆ HM ˆ +M ˆ H ΦW + W H Φ H M ˆ +E =M m) ( ˆ w Y,X ⎢⎣ ⎥⎦. (. ˆ HM ˆ +M ˆ H ΦW + W H Φ H M ˆ + E ⎡ ww H ⎦⎤ =M ˆ ( m) ⎣ w Y,X. (. ˆ HM ˆ +M ˆ H ΦW + W H Φ H M ˆ + Σ + ww H =M w. (3.30). ) • (Φ Φ ) T. H. ) • (Φ Φ ) T. H. 特別需要注意的是 H Σ w = Ew Y , Xˆ ( m) ⎡( w − w )( w − w ) ⎤ = Ew Y , Xˆ ( m) ⎡⎣ ww H ⎤⎦ − ww H ⎣ ⎦. (. 其 中 Σ w + ww H. ) • (Φ Φ ) 是 ( Σ T. H. w. + ww H. ). T. 與 ( Φ H Φ ) 作 Hadamard 乘 積 , 所 謂 的. Hadamard 乘積為兩個維度相同的矩陣相同位置上的值彼此相乘的運算。 最後,EM 演算法可統整如圖 3.4 所示:. 25. (3.31).
(36) ˆ (0) 、 X ˆ ( 0) (使用 3.1.3 的方法) 初始化: M ˆ ( m +1) ≠ X ˆ ( m ) or m ≠ maximum number of inner loop While X. E步驟: Cww = FCss F H. ˆ ˆ( µ Y = MX. m). CYY = Φ( m )Cww Φ( m ) + σ z2 I H. CwY = Cww Φ( m ). H. CYw = Φ( )Cww m. −1 w = CwY CYY ( Y − µY ). −1 Σ w = C ww − CwY C YY C Yw. ˆ + ΦW H=M. (. ˆ HM ˆ +M ˆ H ΦW + W H Φ H M ˆ + Σ + ww H ΣH = M w. (. ). ) • (Φ Φ ) T. H. {. }. ˆ ( m ) = − 1 Y H Y − Y H HX − X H H H Y + X H Σ X 對每個 X 運算一 Ω X Y, X H σ z2. M 步驟:. (. ˆ ( m +1) = arg max Ω X Y, X ˆ ( m) X X. ). end 圖 3.4 ML-EM 演算法之流程. 我們執行 EM 演算法直到收斂準則到達,此收斂準則是去檢查決策出來的資料是否 ˆ ( m+1) = X ˆ ( m ) ),或是遞迴次數到達最大值。 與前一次相同( X. 26.
(37) 3.1.3 初始化設定 由 EM 演算法的收斂特性得知,其遞迴的過程只能保證一定可以收斂到局部最大值. (Local maximum),但無法保證可以收斂到總體最大值(Global maximum),而 EM 最後收 ˆ (0) 和 X ˆ ( 0) 決定。因此,我們提出使用分布在每個 歛到的位置主要是依靠初始估測值 M. OFDM 符碼間特定位置上的 pilot 來估測此初始值。當一個 OFDM 符碼間安插的 pilot 越多,估測到的通道會更接近實際的值,但是過多的 pilot 會浪費傳輸資料頻寬,使得 傳輸率便差;反之,若 pilot 太少,則會始估測出的通道和實際的誤差值太大,導致系 統性能下降,因此 pilot 的設計是相當重要的。 ˆ (0) 和 X ˆ ( 0) 是使用 Deneire, et al. [20]所提出低複雜度 ML 通 在本論文中,初始估測 M. 道估測法,此 ML 估測法具有只利用部分載波就能估測通道的能力,從頻域轉到時域再 轉回去頻域,而實際估測是在時域上進行。 假設在每個 OFDM 符碼中皆安插 N p 個 pilot,並定義 pilot 擺放的子載波位置為. p0 ,. , pN p −1 ,通道延遲為 d1 ,. , d L 。則系統模型可描述如下 Yp = X p ⋅ Fuh ⋅ h + Z. 其 中 Yp = ⎡ Y [ p1 ] , ⎣. {. (3.34). T. , Y ⎡ pN p ⎤ ⎤ 是 一 N p × 1 的向量,為接收到 pilot 位置上的訊號, ⎣ ⎦⎦. }. X p = diag X [ p0 ] ,. , X ⎡⎣ pN p −1 ⎤⎦ 是一 N p × N p 的矩陣,為傳送的 pilot 訊號的對角線矩陣,. ⎡ ⎢ F [ p0 , d1 ] Fuh = ⎢ ⎢ ⎢ F ⎡ pN p −1 , d1 ⎤ ⎦ ⎣ ⎣. ⎤ F [ p0 , d L ] ⎥ ⎥ 是一 N p × L 的矩陣,由 F 中 pilot 擺放位置與通道 ⎥ F ⎡⎣ pN p −1 , d L ⎤⎦ ⎥ ⎦. 27.
(38) 延遲時間對應到位置上的值所組成的矩陣,其中 F 為快速傅立葉轉換矩陣。 接著使用最小平方誤差的概念估測通道脈衝響應 hˆ = arg min Yp − X p Fuh h. 2. h. = (Fuh X p H X p Fuh ) −1 Fuh H X p H Yp. (3.35). H. 其中因為插入的 BPSK 領航碼具有(3.36)、(3.37)的特性,可進而將(3.35)簡化成(3.38)式, 再將估測得到的通道脈衝響應轉至頻域上,即為我們需要的通道初始值. X p H X p = σ p2 I 1. σ. 2 p. X p H = X p −1. (3.36). (3.37). hˆ = (Fuh H Fuh ) −1 Fuh H X p −1Yp. (3.38). ˆ = F ⋅ hˆ M. (3.39). 3.2 以群式載波間干擾消除實現 在 M 步驟使用的竭盡式搜尋法(exhaustive search)是列舉出全部可能的答案,在一一 測試尋找符合的解,當一個 OFDM 符碼的載波個數為 N ,並使用 M -PSK 調變訊號, 則傳送訊號的可能組合有 M N 種,其運算複雜度太高,再加上,由[21]分析出對一子載 波而言,受到的 ICI 能量只有來自於鄰近數個子載波,利用此特性,我們採用群組(group) 的概念,將一個 OFDM 符碼區分成許多個小群組同時執行 EM 演算法及 ICI 消除,以降 低運算複雜度。. 28.
(39) 首先,我們將 N 個子載波區分成許多個大小為 G 的資料群組,每個群組定義為 X j = ⎢⎡ X ⎣⎡( ( jG ) ) N ⎦⎤ ,… , X ⎡ ⎣ ⎣. ( ( ( j + 1) G − 1) ). ⎤⎤ N ⎦⎥ ⎦. T. (3.40). ⎢N ⎥ 其中 j = 0,… , R − 1 , R = ⎢ ⎥ 為群組的總個數。接著定義其相對應的接收群組 ⎣G ⎦. Y j = ⎢⎡Y ⎣⎡( ( jG ) ) N ⎦⎤ ,… , Y ⎡ ⎣ ⎣. ( ( ( j + 1) G − 1) ). ⎤⎤ N ⎦⎥ ⎦. T. (3.41). 及統計特性群組 w j = ⎢⎡ w ⎣⎡( ( jG ) ) N ⎦⎤ ,… , w ⎡ ⎣ ⎣. ( ( ( j + 1) G − 1) ). ⎤⎤ N ⎦⎥ ⎦. T. (3.42). 假 設 資 料 群 組 X k 的 能 量 會 擴 散 到 鄰 近 2Q + 1 個 接 收 群 組 Y j , j = ( ( k − Q ) ) R ,… , ( ( k + Q ) ) R ,而此接收群組 Y j 除了包含此資料群組 X k 的能量外還有 T. ⎤ ˆ ( m ) , … XT 來自於鄰近 2 P +1 個資料群組 ⎡⎢ XT( ( k − P )) ,… , X k ( ( k + P ) )R ⎦⎥ 擴散出來的能量,此外,從 R ⎣ T. 前一次外部遞迴(Outer iteration)我們可以得到估測的通道統計特性 W 、H 及偵測的資料 X j ,分別定義成 W 、 H 與 X j 。. G X1. Y1. 1.運算w的統計特性. X k+P. Xk. X k−P. Yk −Q. Yk. Yk +Q 2.運算Ω函數. 圖 3.5 都卜勒擴散示意圖. 29. XR. YR.
(40) 如圖 3.5 所示, X k 為目前要偵測的群組,一開始我們利用上一次外部遞迴得到的 W 、 H 及 X j 重建 ICI,扣除其鄰近 2Q + 1 個接收群組 Y j 所受到的干擾,並重新定義為. Yj , j = ( ( k − Q ) ) R ,… , ( ( k + Q ) ) R ,表示如下 Yj = Yj −. ∑. i∈Ξk \{k}. H j ,i X i. (3.43). 其中, Ξk = ∪ i =− P ( ( k − i ) ) R , H j ,i 的第 ( p, q ) 個元素由 H 的第 P. ((( jG + p )) , ((iG + q ) ) ) 個 N. N. 元素取得。而在第 m 次內部迴圈中 (EM) 的 E 步驟,我們使用鄰近 2 P + 1 個資料群組 T. T. T ⎡ XT ⎤ ⎡ T ⎤ ˆ ( m ) , … XT ,… , X k ( ( k + P ) )R ⎦⎥ 以及相對應的接收群組 ⎢⎣ Y( ( k − P ))R ,… , Y( ( k + P ))R ⎦⎥ 來計算新的 ⎣⎢ ( ( k − P ))R T. T. ˆ 是對前一次內部迴圈得到 統計特性 ⎡⎢ w T( ( k − P ) ) ,… , w T( ( k + P ) ) ⎤⎥ ,包含 W 、 H 及 Σ H ,其中 X k ⎣ R R ⎦ ˆ ( m) 決策結果。 的X k ˆ ( 0) 是直接從 X 取得,接著,我們使用 必須特別注意的是,第一次內部迴圈初始值 X k k T. G Y = ⎡⎢ Y(T( k −Q ) ) ,… , Y(T( k +Q )) ⎤⎥ 對 X k ∈ {1, −1} 每個組合運算一相對應的 Ω 函數 ⎣ R R ⎦. (. ). {. ( ). ˆ ( m) = − 1 Y H Y − Y H H X − X H H H Y + X H Σ Ω X k Y, X j , X k k ,k k k k ,k k H 2. ( ). 其中 Σ H. k ,k. σz. 的第 ( p, q ) 個元素是從 Σ H 的第. k ,k. Xk. }. (3.44). ((( kG + p ) ) , (( kG + q )) ) 個元素取得。 N. N. 最後在 M 步驟,找一組資料群組使(3.44)最大化. (. ˆ ( m+1) = arg max Ω X Y, X , X ˆ ( m) X k k j k Xk. ). (3.45). 以上這些步驟是 R 個群組同時執行,在每次外部遞迴裡,EM 演算法反覆運算直到. ˆ ( m+1) = X ˆ ( m) 或是遞迴次數達到最大遞迴數,在每次外部遞迴結束時, X 與 W 被更新, X k k j ˆ ( m ) 更 新 , W 的 第 ( kG + j ) 個 對 角 線 元 素 被 第 k 個 群 組 建 構 的 W 中 第 其中 X j 被 X j 30.
(41) ( PG + j ) 個對角線元素取代,其中 j = 0,… , G − 1, k = 0,… , R − 1。ML-EM 接收機之詳細 流程如圖 3.4 所示。 因 EM 演算法的效能主要由初始值所主宰,ICI 干擾嚴重時,一開始使用估測的平 均通道增益所偵測得到的初始值錯誤率很高,單靠 EM 演算法無法獲得很大的增益,所 以我們接著會在第四章的部份藉由編碼的特性來改善此一問題。. 31.
(42) Y EM Initialization ˆ (0) X. ˆ M. m=1 EM E-step. m = m +1. W M-step. No. Stop ? Yes. X. W. Y. ICI Cancellation. Y. 圖 3.6 ML-EM 接收機運作流程圖. 32.
(43) 第四章 基於期望值最大化之渦輪式接收機 我們在本章提出一基於期望值最大化之渦輪式接收機(Turbo-EM Receiver),希望能 利用編碼的特性來提升前一章提出的 ML-EM 接收機之系統效能。此 Turbo-EM 由最大 後 置 機 率 判 定 之 期 望 值 最 大 化 (Maximum A-posteriori Probability-Expectation. Maximization, MAP-EM)及雙向軟式輸出維特比演算法(Bi-directional Soft Output Viterbi Algorithm, Bi-SOVA)解碼器組成,如圖 4.1 所示。. Π. Convolutional Code. BPSK Modulator. OFDM Modulator. Outer iteration. ICI Cancellation. Y. LC. W. LC. Inner iteration. OFDM Demodulator. Y. Π. L Mex. MAP-EM Detector. L Cex. Π. −1. Π. L Mex. Bi-SOVA Decoder. LC. -. +. L Cex. +. LC. 圖 4.1 Turbo-EM 傳送端與接收機之架構圖. 在本章中,傳送端多加了迴旋編碼器及交錯編排器,接收端則使用 MAP-EM 取代 第三章所使用之 ML-EM 偵測器,其中 MAP-EM 除了 ML-EM 的資訊外還需要各個編碼 位元之事前機率,所以使用 Bi-SOVA 進行解碼同時得到對數相似性比值(Log Likelihood 33.
(44) Ratio, LLR)提供 MAP-EM 運算所需之事前機率。 Turbo-EM 接收機第一次的外部迴圈中,MAP-EM 使用 3.1.3 介紹的方法進行通道平 均增益值的估測,並使用硬式決策得到一組初估的傳送編碼位元,為了避免安插在一個. OFDM 符碼內的 pilot 及資料受到嚴重的 ICI 干擾情況,導致訊框(Frame)發生嚴重的連 續錯誤(burst error),我們先將初估的傳送編碼位元經過 Bi-SOVA 得到一組具有編碼增益 較準確的傳送資料再送入 MAP-EM 演算法當作初始值。而在之後每一次的外部遞迴中,. MAP-EM 利用 Bi-SOVA 回授的外部資訊(extrinsic information)運算得到 M 步驟所需的事 前機率,並可得到 MAP-EM 提供之 LLR,以 L Mex 表示,再轉換成軟式位元(soft bits)送 入 Bi-SOVA 解碼器,而 Bi-SOVA 解碼器回授的 LLR 以 L Cex 表示(在第一次外部遞迴時,. LCex = 0 )。在最後一次外部迴圈,我們對 Bi-SOVA 解碼器運算得到的 L C 做硬式決策得 到我們偵測的傳送資訊。. Turbo-EM 接收機是對 Bi-SOVA 回授的 L C (沒有扣掉 MAP-EM 提供的外部資訊)做 軟式映射(soft mapping)得到的軟式編碼位元來進行消除 ICI 的動作,而對 L C 做硬式決策 來當作 MAP-EM 的初始值,具有編碼增益,準確性較高,能幫助遞迴後得到較準確的 w, 並消掉較精確的 ICI,縮減第三章中估測方法與理想情況下效能間的差距。 接下來我們將針對架構圖中使用之 Bi-SOVA 及 MAP-EM 進行說明。. 34.
(45) 4.1 雙向軟式輸出維特比演算法(Bi-SOVA)解碼簡介 SOVA 是在 1989 年由 Hagenauer 及 Hoeher 所提出的一種軟式輸入軟式輸出(Soft Output Soft Input, SISO)的解碼方式,其最大貢獻就是在接收端提供了額外的資訊,而渦 輪碼便是利用此特性來改善解碼的效能。一般渦輪式解碼器使用以下兩種演算法:(1) 最大後置機率判定 (MAP) 演算法, (2) 軟式輸出維特比演算法 (Soft Output Viterbi. Algorithm, SOVA)。MAP 的效能雖較 SOVA 好,但其在架構上較為複雜。而 Bi-SOVA[22] 是改善 SOVA 演算法的一種新的解碼方式,因而對渦輪式解碼而言比 SOVA 具有更佳的 解碼效能及較低的複雜度。渦輪碼主要的概念是利用每個位元的軟式資訊來進行遞迴, 其軟式資訊代表某一個位元的可靠度。在遞迴的過程中,每個位元的可靠度會不斷的增 加,進而增加解碼的效能。. SOVA 是以 LLR 的形式估測每個傳送符碼的軟式輸出資訊,如(4.1)所示。其中 r 為 接收訊號, P (C = i | r ) , i = 0,1 為傳送訊號之後置機率, µ 1 為當 C = 1 時所有路徑中最小 的路徑累積值(Metrics), µ 0 為當 C = 0 時所有路徑中最小的路徑累積值。. −. LC = ln. µ1 2σ C2. P (C = 1| r ) e µ 0 − µ1 = ln µ 0 = 2σ C2 P(C = 0 | r ) − 2 2σ C e. (4.1). 再根據此 LLR 做硬式決策來求得傳輸資料. ⎧1 if LC ≥ 0 C=⎨ o.w ⎩0. (4.2). SOVA 解碼器的軟式輸出是由符碼 0 與 1 不同的最小路徑中取得,最後運算得到的. 35.
(46) LLR 為軟式資訊,需要透過硬式決策裝置才可以判斷出 0 與 1 的訊號。其演算法分三個 步驟進行如下: ¾. 順向遞迴式(Forward recursion) 順向路徑相當於傳統維特比演算法(Viterbi algorithm),可得到最小的路徑累積 值為 µτ ,min 的 ML 路徑。定義 St 為在時間 t 的節點, µt( x ) 為所有節點在時間 t 最小的累 積路徑。. 1. 設定初始狀態的值. t = 0 , S0 = 0 , Sτ = 0 , µ0f ( S0 = 0 ) = 0 , µ0f ( S0 ≠ 0 ) = ∞ 2. 時間 t 增加 1 - 運算在時間 t 所有節點間的分支權重 vtc (l ', l ) ,其中 l ', l = 0,1, 節點的個數. - 運算在時間 t 所有節點最小的累加路徑 µt f 並找出殘存路徑 - 重複步驟 2 直到 t = τ 3. 最後得到的路徑節點 Sτ 是一個 ML 路徑其路徑累積值為 µτ ,min ¾. 逆向遞迴式(Backward recursion) 直接利用順向遞迴式計算的 vtc (l ', l ) ,反方向來尋找 ML 路徑。. 1. 設定初始狀態的值 t = τ , Sτ = 0 , S0 = 0 , µτb ( Sτ = 0 ) = 0 , µτb ( Sτ ≠ 0 ) = ∞. 36. , M s −1 , M s 為.
(47) 2. 時間 t 減少 1 - 利用順向遞迴式求得的 vtc (l ', l ) 運算在時間 t 所有節點最小的累加路徑 µtb 並找 出殘存路徑. - 重複步驟 2 直到 t = 0 ¾. 軟式決定(Soft decision). 1. 設定 t = 0 2. 時間 t 增加 1 - 在時間 t 取出最大相似估計 ct = i , i = 0,1 - 決定 µ ti 亦即 µti = µτ ,min - 找出一個累加路徑 µtc , c = i ⊕ 1 ,這裡的 ⊕ 是一個 mod-2 的加法,其算式如 下:. µtc = min {µt f−1 (l ') + vtc (l ', l ) + µtb (l )} l ,c. (4.3). µt f−1 (l ') 是在時間 t − 1 節點 l ' 中的順向遞迴式所殘存之累加路徑權重, vtc (l ', l ) 是在時間 t 以符號 c 為估計項從節點 l ' 到 l 的路徑權重值, µtb (l ) 是在時間 t 與 節點 l 中的逆向遞迴式所殘存之累加路徑權重。. - 最後計算 LC ,t ,亦即 LC ,t =. µt0 − µt1 2σ C2. 根據此 LLR 值做硬式決策便可得到傳輸訊號,其中 σ C2 為進入 Bi-SOVA 解碼器之序 列的變異數,由[23]可得知一序列經過反交錯編排器後其變異數 σ C2 及期望值 mC 可分別 由(4.4)及(4.5)求得,其中 M ⋅ N 為交錯編排器的大小 37.
(48) σ C2 =. 1 M ⋅N. mC =. M ⋅N. ∑(r. k. k =1. 1 M ⋅N. − mC ). 2. (4.4). M ⋅N. ∑r k =1. (4.5). k. 4.2 渦輪式資料偵測方法 使用 MAP 估測訊號可以描述如下式 ˆ = arg max L( X | Y ) X X. (4.6). = arg max { L(Y | X) + L( X)} X. MAP-EM 演算法依據以下兩步驟遞迴解(4.6)的問題 E-步驟:計算 Ω( X | Y, X ( m ) ) = Ew|Y,X( m ) [ L(Y, w | X) ]. (4.7). M-步驟: X ( m +1) = arg max {Ω( X | Y, X( m ) ) + L( X)} X. ⎧ 1 ⎫ = arg max ⎨− 2 Y H Y − Y H HX − X H H H Y + X H Σ H X + L( X) ⎬ X ⎩ σz ⎭ ⎧1 ⎫ = arg min ⎨ 2 Y H Y − Y H HX − X H H H Y + X H Σ H X − L( X) ⎬ X ⎩σ z ⎭. {. }. {. (4.8). }. 比較 MAP-EM 與第三章介紹之 ML-EM,在 E 步驟是完全相同的,而在 M 步驟. MAP-EM 則多了一項 X 的對數事前機率 L( X) ,在第一次遞迴時,假設每個位元的事前 機率皆為 1,之後,此項是由前一次外部遞迴 Bi-SOVA 回授的 LpCex 值求得(其中 p 代表前 一次外部遞迴),如下所示:. 38.
(49) p. P ( X = 1) =. e LCex. (4.9). p. 1 + e LCex p. p. ln P( X = 1) = LpCex − ln(1 + e LCex ) = LpCex − ln(e0 + e LCex ). (4.10). 及. P ( X = -1) =. 1. (4.11). p. 1 + e LCex p. p. ln P( X = −1) = − ln(1 + e LCex ) = − ln(e0 + e LCex ). (4.12). 接著,為了減少計算複雜度,所以我們使用(4.13)的關係式將(4.10)及(4.12)式加以簡化, 並將 LpCex 分三種情況討論,簡化整理如(4.14)及(4.15)式. ln ∑ e j ≈ max a j a. (4.13). j. j. ⎧ 0 ⎪ ln P( X = 1) = ⎨ LCex ⎪− ln(2) ⎩ ⎧(−1) × LCex ⎪ ln P( X = −1) = ⎨ 0 ⎪ ⎩ − ln(2). for LCex > 0 for LCex < 0 for LCex = 0 for LCex > 0 for LCex < 0 for LCex = 0. (4.14). (4.15). 由(4.14)及(4.15)找出 X 每個子載波的對數事前機率相加,即為 M 步驟中所需的 L( X) , 可加強 M 步驟搜尋資料的準確性。 在每一次外部迴圈中,MAP-EM 除了利用 Bi-SOVA 回授之外部資訊 LpCex 協助 M 步 驟搜尋資料外,也運算出新的外部資訊 L Mex 送回 Bi-SOVA 進行解碼,我們將 MAP-EM. 39.
(50) 產生之第 k 個群組中第 j 個子載波上的 LLR 推導如下,並令 X ⎡⎣( ( kG + j ) ) N ⎤⎦ = C j ,其中. Θ +j 為第 k 個群組中第 j 個子載波為+1 的所有可能的集合, Θ −j 則為第 k 個群組中第 j 個 子載波為-1 的所有可能的集合,Λ = {i i = 0,… , G − 1, Ci = +1, i ≠ j} 代表在第 k 個群組中除 T. 了第 j 個子載波之外其餘子載波為+1 的集合,LpCex = ⎡⎣ LpCex ,0 ,… , LpCex , j −1 , LpCex , j +1 ,… , LpCex ,G −1 ⎤⎦ 。. LMex , j = ln. ( P (C. )−L = −1 Y ). P C j = +1 Y j. ∑ P(X. = ln. X k ∈Θ +j. ∑ P (X. X k ∈Θ −j. Y. k. Y. k. P ( C j = +1) = ln. = ln. P ( C j = −1) P ( C j = +1) P ( C j = −1). p Cex , j. ) ). ∑ P (Y X )e. ∑ LpCex ,i. ∑ P (Y X ) e. ∑ LpCex ,i. e. ∑ P (Y X )e ∑ P (Y X ) e. ∑ LpCex ,i. −. ∑ P (Y X ) e. e. ∑ P (Y X )e. ∑ LpCex ,i. ∑. = ln. e. Y − H k Xk. i∈Λ. i∈Λ. k. X k ∈Θ −j. −. i∈Λ. k. G −1. ∑. 1 Lp 2 i =0,i ≠ j Cex ,i. − LpCex , j. k. ∑ LpCex ,i. X k ∈Θ +j. = ln. i∈Λ. k. X k ∈Θ +j. G −1. ∑. i∈Λ. ∑ LpCex ,i. X k ∈Θ −j. 1 Lp 2 i =0 ,i ≠ j Cex ,i. − LpCex , j. k. X k ∈Θ −j. + ln. i∈Λ. k. X k ∈Θ +j. LpCex , j −. − LpCex , j. 2. 1. σ n2. e2. {X } {L }. j. {X } {L }. j. T k. j. p Cex. X k ∈Θ +j. ∑. −. e. Y − H k Xk. σ n2. 2. 1. e2. T k. j. p Cex. X k ∈Θ −j. ⎡ Y−H X k k ≈ max+ ⎢ − 2 X k ∈Θ j ⎢ σn ⎣. (4.13). 2. ⎤ ⎡ Y−H X 1 k k + {XTk } {LpCex } ⎥ − max− ⎢ − 2 j j⎥ X k ∈Θ j ⎢ 2 σn ⎦ ⎣. 40. 2. +. ⎤ 1 T X k } {LpCex } ⎥ { j j⎥ 2 ⎦.
(51) MAP-EM 利用 Bi-SOVA 運算得到新的外部資訊後再將其依(4.16)式做軟式映射,並送入 Bi-SOVA 進行解碼並得到新的 L Cex 。. ⎛L ⎞ E ⎣⎡C j ⎦⎤ = tanh ⎜ Mex , j ⎟ ⎝ 2 ⎠. (4.16). 圖 4.2 為 Turbo-EM 接收機詳細流程,須特別注意在第一次外部遞迴使用一階等化 器得到初估的傳送訊號後,先進入 Bi-SOVA 得到具有編碼效益較準確的傳送訊號,再 進行 E 步驟與 M 步驟的運算,接著,對 MAP-EM 送出之外部資訊做軟式映射後傳入. Bi-SOVA 進行解碼,MAP-EM 送出之序列經過(4.16)式軟式映射後會介於[1,-1]間,而在 數次遞迴後,MAP-EM 提供的外部資訊可靠度提升,經過軟式映射後會集中在 1 與-1 上,所以可以將(4.5)式輸入解碼器序列的期望值設為 1。此外,在 ICI 消除方面,在此 是採用對 Bi-SOVA 求得的 LLR 做軟式映射所得到的傳送訊號,而不是使用上一次外部 迴圈中 MAP-EM 估測得到的傳送訊號。. 41.
(52) Y EM Initialization ˆ (0) ˆ ,X M. Bi-SOVA ˆ (0) X. m=1 EM E-step W. m = m +1. LCex. M-step. No. Stop ?. Y, L C. W. Yes. L Mex. ICI Cancellation. Bi-SOVA. Stop ? Yes. Y No. LC. LC. Hard decision Information bits 圖 4.2 Turbo-EM 接收機運作流程圖 42.
(53) 第五章 電腦模擬 本章內容為利用電腦模擬的方式,來驗證前兩章提出的 ML-EM 及 Turbo-EM 接收 機應用於 IEEE802.16e OFDM-PHY 規格[12]之正交分頻多工系統於不同都卜勒效應下的 位元錯誤率,並假設通道路徑數、通道功率、通道延遲時間及雜訊能量皆為已知的。. 5.1 模擬參數 本論文是依據 IEEE802.16e OFDM-PHY 規格進行模擬,其參數設定如表所示: 系統設定 載波頻率(Carrier Frequency). 2.3G Hz. 系統頻寬(Bandwidth). 5M Hz. 子載波數目. 256. 調變(Modulation). BPSK. 資料子載波數目. 192. 領航子載波數目. 8. DC&虛子載波數目. 56. 領航子載波指標. {13,38,63,88,168,193218,243}. 保護區間(Guard interval). 64. 43.
(54) 通道 路徑數目(L). 2. 通道功率. 路徑 1. 路徑 2. 0dB. 0dB. 正規化都卜勒頻率( Fd T ). 0.05 ; 0.1. ML-EM 接收機參數設定 內部迴圈數(EM). 10. 外部迴圈數. 3 Turbo-EM 接收機參數設定. 迴旋編碼產生矩陣. ⎡1 0 1 1 0 1 1⎤ ⎢1 1 1 1 0 0 1⎥ ⎣ ⎦. 編碼率. 1/2. 暫存器個數. 6. 5.2 模擬結果 在本論文中,我們分別在兩種不同的FdT (0.05、0.1)環境中,對所提出的兩種接收 機架構進行模擬與比較,觀察其所帶來的效益。為了在比較性能時有所依據,本論文中 每一張模擬結果圖皆描繪一條在一個OFDM符碼期間內通道類似靜止(Quasi-static)之脈 衝響應的理想估計,亦即給定每一路徑的衰減樣式 (Fading pattern)之中間值所做的模 擬,以NOICI表示。另外,我們實際模擬皆在三種情況下進行:. 44.
(55) 1. 通道狀態資訊及傳送資料已知(CSI and data known):假設通道平均增益及傳送 資料皆為已知,拿來當作 EM 演算法之初始值。. 2. 通道狀態資訊已知(CSI known) :利用已知的平均通道增益估測傳送資料。 3. 估測的情況(CSI est.):使用 3.1.3 的方法估測通道平均增益並進行資料偵測,將 估測得到的資料當作 EM 演算法之初始值。 在所有的模擬中,通道狀態資訊及傳送資料已知的模擬結果代表我們提出之方法的 效能底限(Lower Bound)。. I.. ML-EM 接收機 z. P 與 Q 的組合 首先,我們在假設通道狀態資訊及傳送資料已知情況下,觀察在不同的FdT與. 區塊大小( G )所需要的P與Q的組合為何。 圖 5.1~圖 5.6 分別為在FdT = 0.05、 0.1 ,而 G 分別為 1、2、4 的情況下,觀察 選擇不同的(P,Q)對效能的影響有多大,可以看出當(P,Q)的選取到達某個值後,即 使再加大對效能也不會有明顯的改善,因此我們由圖 5.1~圖 5.6 分別在六種不同的 情況下模擬的結果來選擇(P,Q)的組合,並整理於表 5.1,而之後模擬為了有比較的 準則,我們統一在FdT = 0.05 的情況下,皆採用(3,2)的組合來觀察效能曲線圖,而 在FdT = 0.1 時,則採用(5,4)的組合。. 45.
(56) FdT = 0.05 G = 1. -1. 10. One-tap EQ(CSI known) ML-EM(CSI known)[2,1] ML-EM(CSI known)[3,2] ML-EM(CSI known)[4,3] ML-EM(CSI known)[5,4]. -2. BER. 10. -3. 10. -4. 10. -5. 10. 12. 14. 16. 18. 20 22 Eb/No(dB). 24. 26. 28. 30. 圖 5.1 FdT = 0.05、G = 1 在通道狀態資訊及傳送資料已知情況下, (P,Q)不同組合的效能。(P,Q)={(2,1),(3,2),(4,3),(5,4)}. FdT = 0.05 G = 2. -1. 10. One-tap EQ(CSI known) ML-EM(CSI known)[2,1] ML-EM(CSI known)[3,2] ML-EM(CSI known)[4,3]. -2. BER. 10. -3. 10. -4. 10. -5. 10. 12. 14. 16. 18. 20 22 Eb/No(dB). 24. 26. 28. 30. 圖 5.2 FdT = 0.05、G = 2 在通道狀態資訊及傳送資料已知情況下, (P,Q)不同組合的效能。(P,Q)={(2,1),(3,2),(4,3)}. 46.
(57) FdT = 0.05 G = 4. -1. 10. One-tap EQ(CSI known) ML-EM(CSI known)[2,1] ML-EM(CSI known)[3,2] ML-EM(CSI known)[4,3]. -2. BER. 10. -3. 10. -4. 10. -5. 10. 12. 14. 16. 18. 20 22 Eb/No(dB). 24. 26. 28. 30. 圖 5.3 FdT = 0.05、G = 4 在通道狀態資訊及傳送資料已知情況下, (P,Q)不同組合的效能。(P,Q)={(2,1),(3,2),(4,3)}. FdT = 0.1 G = 1. -1. 10. One-tap EQ(CSI known) ML-EM(CSI known)[3,2] ML-EM(CSI known)[5,4] ML-EM(CSI known)[7,6] ML-EM(CSI known)[9,8]. -2. BER. 10. -3. 10. -4. 10. -5. 10. 12. 14. 16. 18. 20 22 Eb/No(dB). 24. 26. 28. 30. 圖 5.4 FdT = 0.1、G = 1 在通道狀態資訊及傳送資料已知情況下, (P,Q)不同組合的效能。(P,Q)={(3,2),(5,4),(7,6),(9,8)}. 47.
(58) FdT = 0.1 G = 2. -1. 10. One-tap EQ(CSI known) ML-EM(CSI known)[3,2] ML-EM(CSI known)[5,4] ML-EM(CSI known)[7.6]. -2. BER. 10. -3. 10. -4. 10. -5. 10. 12. 14. 16. 18. 20 22 Eb/No(dB). 24. 26. 28. 30. 圖 5.5 FdT = 0.1、G = 2 在通道狀態資訊及傳送資料已知情況下, (P,Q)不同組合的效能。(P,Q)={(3,2),(5,4),(7,6)}. FdT = 0.1 G = 4. -1. 10. One-tap EQ(CSI known) ML-EM(CSI known)[3,2] ML-EM(CSI known)[5,4] ML-EM(CSI known)[7.6]. -2. BER. 10. -3. 10. -4. 10. -5. 10. 12. 14. 16. 18. 20 22 Eb/No(dB). 24. 26. 28. 30. 圖 5.6 FdT = 0.1、G = 4 在通道狀態資訊及傳送資料已知情況下, (P,Q)不同組合的效能。(P,Q)={(3,2),(5,4),(7,6)}. 48.
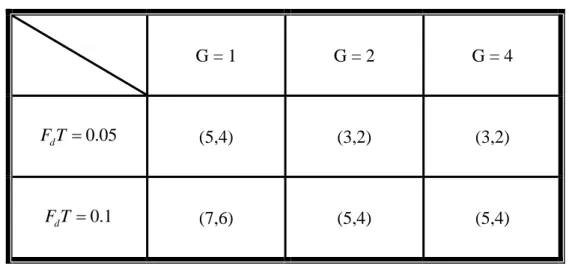
(59) 表 5.1 建議選取的(P,Q)組合. z. G=1. G=2. G=4. Fd T = 0.05. (5,4). (3,2). (3,2). Fd T = 0.1. (7,6). (5,4). (5,4). ML-EM 沒有經過 ICI 干擾消除 V.S ML-EM 圖 5.7、圖 5.8 可以看出ML-EM接收機有無做ICI消除對錯誤率的影響,沒有做. ICI消除會造成錯誤率提前發生error floor的現象,當SNR越高,沒有做ICI消除(圓圈) 與有做ICI消除(三角形)間的間隔越大,Perfect情況下更是明顯,在FdT = 0.05 時錯 誤率大概差了 10 倍,FdT = 0.1 時則差了 40~50 倍之多。 由圖 5.7 中觀察得到,在 Estimated 情況下有做 ICI 消除的錯誤率雖然跟 Perfect 的曲線圖仍有差距,但已可以逼近 NOICI 的錯誤率。在之後的模擬圖,僅以包含. ICI 消除的機制來觀察系統效能。. 49.
(60) FdT = 0.05 G = 4 (3,2). -1. 10. -2. BER. 10. -3. 10. One-tap EQ(CSI est.) -4. 10. One-tap EQ(CSI known) ML-EM w.o ICI cancellation(CSI est.) ML-EM w.o ICI cancellation(CSI known) ML-EM(CSI est.) ML-EM(CSI known). -5. 10. 12. NO ICI. 14. 16. 18. 20 22 Eb/No(dB). 24. 26. 28. 30. 圖 5.7 FdT = 0.05、G = 4、(3,2),ML-EM接收機有無使用ICI消除機制的差異. FdT = 0.1 G = 4 (5,4). -1. 10. -2. BER. 10. -3. 10. One-tap EQ(CSI est.) -4. 10. One-tap EQ(CSI known) ML-EM w.o ICI cancellation(CSI est.) ML-EM w.o ICI cancellation(CSI known) ML-EM(CSI est.) ML-EM(CSI known). -5. 10. 12. NO ICI. 14. 16. 18. 20 22 Eb/No(dB). 24. 26. 28. 30. 圖 5.8 FdT = 0.1、G = 4、(5,4),ML-EM接收機有無使用ICI消除機制的差異. 50.
數據


+7






相關文件
了⼀一個方案,用以尋找滿足 Calabi 方程的空 間,這些空間現在通稱為 Calabi-Yau 空間。.
You are given the wavelength and total energy of a light pulse and asked to find the number of photons it
Reading Task 6: Genre Structure and Language Features. • Now let’s look at how language features (e.g. sentence patterns) are connected to the structure
• ‘ content teachers need to support support the learning of those parts of language knowledge that students are missing and that may be preventing them mastering the
好了既然 Z[x] 中的 ideal 不一定是 principle ideal 那麼我們就不能學 Proposition 7.2.11 的方法得到 Z[x] 中的 irreducible element 就是 prime element 了..
volume suppressed mass: (TeV) 2 /M P ∼ 10 −4 eV → mm range can be experimentally tested for any number of extra dimensions - Light U(1) gauge bosons: no derivative couplings. =>
(c) Draw the graph of as a function of and draw the secant lines whose slopes are the average velocities in part (a) and the tangent line whose slope is the instantaneous velocity
For ex- ample, if every element in the image has the same colour, we expect the colour constancy sampler to pro- duce a very wide spread of samples for the surface
