國 立 交 通 大 學
土木工程學系
碩 士 論 文
狀態空間 DLV 法在扭轉耦合結構之
地震損傷探測試驗研究
An Experimental Study of State-Space DLV Method in
Seismic Damage Detection of Torsionally Coupled Structures
研 究 生:吳柏霖
指導教授:王彥博 教授
狀態空間 DLV 法在扭轉耦合結構之地震損傷探測試驗研究
An Experimental Study of State-Space DLV Method in
Seismic Damage Detection of Torsionally Coupled Structures
研 究 生:吳柏霖 Student:Po Lin Wu 指導教授:王彥博 Advisor:Dr. Yen-Po Wang
國 立 交 通 大 學 土木工程學系碩士班
碩 士 論 文
A Thesis
Submitted to Department of Civil Engineering College of Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master of Science
in
Civil Engineering July 2011
Hsinchu, Taiwan, Republic of China
I
狀態空間 DLV 法在扭轉耦合結構之地震損傷探測試驗研究
研究生:吳柏霖 指導教授:王彥博 博士 國立交通大學土木工程研究所摘要
本研究以 DLV 損傷探測法結合 SRIM 系統識別分析,針對扭轉 耦合結構進行一系列數值模擬與振動台試驗。數值模擬結果顯示,不 論結構為單一或複數樓層受損,均可準確定位出破壞樓層。在振動台 試驗方面,分別考慮以位形空間 DLV 法與狀態空間 DLV 法進行結構 損傷探測分析。結果顯示位形空間 DLV 法之偵測能力不佳,狀態空 間 DLV 法則有較高之成功率,初具實際應用之潛力,惟仍有部分案 例未能準確定位,應與試驗之地震強度較低(PGA=0.05g)有關。由於 監測訊號中含有雜訊,當擾動訊號較弱時,噪訊比相對較高,系統識 別誤差因而增大。此外,當破壞定位向量經由柔度差異矩陣之奇異值 分解得到後,需加載於健康結構上進行應力分析。本研究目前採用之 ETABS 模型與真實結構間仍有落差,故導致額外誤差。建議未來應 由系統識別參數進行應力分析,進一步提升實務應用之可行性。 關鍵字:扭轉耦合結構、系統識別、結構損傷探測、柔度矩陣、損傷 定位向量III
An Experimental Study of State-Space DLV method in
Seismic Damage Detection of Torsionally Coupled Structures
Student : Po-Lin Wu Advisor : Dr. Yen-Po Wang
Department of Civil Engineering College of Engineering National Chiao Tung University
Abstract
In this study, method of damage location vector (DLV) in conjunction with SRIM system identification is developed for damage detection of torsionally coupled structures. It is verified via a series of a series of numerical simulations and shaking table tests. Simulation results indicate that the damaged stories can be accurately identified, regardless of single or multiple damages. The experimental data have been analyzed using both the configuration-space DLV and state-space DLV methods for damage detection. Results show that the configuration-space DLV method fails to identify the damage in most cases while the state-space DLV method proves more successful, indicating its potential in practical application. Nevertheless, there were still a few cases not accurately identified. It is partly attributed to the low earthquake intensity (PGA=0.05g) considered in the tests as the noise-to-signal ratio becomes higher for weak signals, thus introducing errors in the system
IV
identification as a consequence. Moreover, the damage locating vectors obtained from singular value decomposition of the flexibility differential matrix are to be applied on the intact structure for further stress analysis, and discrepancy between the ETABS model and test structure considered in this study leads to additional errors. In order to be practically more feasible, it is suggested to further explore new methodologies for stress analysis using parameters directly from system identification.
Keywords : torsionally coupled structures, system identification, structural damage detection, flexibility matrix, damage locating vectors
V
誌謝
感謝吾師 王彥博教授的悉心指導。在論文寫作期間,吾師費心 的指正與修改,方使本論文得以順利完成。在研究所兩年的期間,讓 學生體會到吾師嚴謹的治學態度、對學術研究鍥而不捨的精神與求知 的熱忱,實為學生學習的典範。對於吾師的諄諄教誨,在此致上最誠 摯的謝意。 論文口試期間,承蒙國立高雄第一科技大學 盧煉元教授、中華 大學 張奇偉教授、國立交通大學 趙文成教授撥冗指正,並提供寶貴 意見,使本論文之內容更加詳實完備,亦在此表達最誠摯的謝意。 在交大的研究生涯中,感謝李建良博士、張簡嘉賞博士及陳逸軒 博士在研究及實驗上的指導;畢業學長羿廷、顥勳、勵元、力郕及學 長志儒在研究所生活上的經驗分享;學弟黃罡、學妹怡廷、同窗柏翰 及越南生 Tuyen 的支援與協助。有同門師兄弟妹們的鼎力相助,使我 平穩得走過崎嶇的研究之路。 在這兩年中,很開心遇到連峰及智洋兩位同窗夥伴。在學業上一 起奮鬥打拼,在生活上一同談天說地、分享喜悅,一切的點點滴滴, 畢生難忘。也很高興能與大學同窗家宇、宗輝、明儒、同學承哲、沐 崧及學弟懷國奔馳於球場上,延續著我對籃球的熱情。此外,和宣妤、 維莘、鈞誠、江祥等大夥遊遍臺灣、嚐遍美食的日子,為我單調的研 究生活,增添幾分色彩。感謝你們陪伴我度過了研究所的求學生涯。 最後,衷心的感激我的家人,你們的支持、鼓勵、關懷與無怨無 悔的奉獻,讓我得以順利取得碩士學位。謹以本文獻給所有關心我的VI 朋友們,謝謝你們。
VII
目錄
摘要... I Abstract ...III 誌謝...V 目錄... VII 表目錄... XI 圖目錄... XVII 第一章 緒論...1 1.1 研究動機與目的...1 1.2 文獻回顧...3 1.3 論文架構...5 第二章 SRIM 系統識別分析理論...7 2.1 前言...7 2.2 SRIM 系統識別理論回顧...8 2.2.1 萃取 A 和 C 矩陣 ...12 2.2.2 萃取 B 和 D 矩陣 ...16 2.2.3 萃取系統模態參數...19 2.3 扭轉耦合結構之座標系統轉換 ...21 2.4 SRIM 與 ARX 系統識別分析之比較 ...22 第三章 DLV 結構損傷探測理論...43 3.1 前言...43 3.2 DLV 損傷探測理論之回顧...43 3.3 結構柔度矩陣之建立...47 第四章 扭轉耦合結構之 DLV 損傷探測數值驗證 ...49 4.1 前言...49VIII 4.2 三層樓扭轉耦合結構之損傷探測分析 ...50 4.3 五層樓扭轉耦合結構之損傷探測分析—特徵分析 ...54 4.3.1 弱軸單邊強軸雙邊配置斜撐...54 4.3.1.1 單一樓層受損...55 4.3.1.2 複數樓層受損...57 4.3.2 弱軸雙邊強軸單邊配置斜撐...59 4.3.2.1 單一樓層受損...59 4.3.2.2 複數樓層受損...64 4.4 基於地震反應之扭轉耦合結構損傷探測分析 ...69 4.4.1 地震於 x 向輸入 ...70 4.4.1.1 單一樓層受損...70 4.4.1.2 複數樓層受損...73 4.4.2 地震於 y 向輸入 ...75 4.4.2.1 單一樓層受損...75 4.4.2.2 複數樓層受損...77 4.5 小結...79 第五章 扭轉耦合結構之振動台試驗與損傷探測 ...141 5.1 前言...141 5.2 試驗設備與規劃...141 5.2.1 試驗設備...141 5.2.2 試驗規劃...143 5.3 振動台試驗結果與分析...145 5.3.1 弱軸單邊強軸雙邊配置斜撐...145 5.3.1.1 單一樓層受損...145 5.3.1.2 複數樓層受損...151
IX 5.3.2 弱軸雙邊強軸單邊配置斜撐...156 5.3.2.1 單一樓層受損...157 5.3.2.2 複數樓層受損...162 5.4 狀態空間 DLV 損傷探測法之應用...165 5.4.1 弱軸單邊強軸雙邊配置斜撐...166 5.4.1.1 單一樓層受損...166 5.4.1.2 複數樓層受損...171 5.4.2 弱軸雙邊強軸單邊配置斜撐...176 5.4.2.1 單一樓層受損...176 5.4.2.2 複數樓層受損...180 5.5 小結...182 第六章 結論與建議 ...291 參考文獻...295 附錄 A ARX 系統識別分析理論 ...299 A.1 離散時間系統的輸入-輸出模型 ...299 A.2 含雜訊之系統模型與預測誤差...300 A.3 遞迴預測誤差法...302 附錄 B 狀態空間 DLV 損傷探測分析理論...305 B.1 狀態空間 DLV 法之理論回顧 ...305 B.2 結合 SRIM 系統識別之狀態空間 DLV 法 ...314
XI
表目錄
表 2.1 三層樓扭轉耦合結構之系統參數(特徵分析)...29 表 2.2 三層樓扭轉耦合結構之系統參數(x 向輸入;ARX 系統識別) 30 表 2.3 三層樓扭轉耦合結構之系統參數(y 向輸入;ARX 系統識別) 31 表 2.4 三層樓扭轉耦合結構之系統參數(x 向輸入;SRIM 系統識別) ...32 表 2.5 三層樓扭轉耦合結構之系統參數(y 向輸入;SRIM 系統識別) ...33 表 2.6 ARX 與 SRIM 識別之模態正交性比較 ...34 表 4.1 DLV 分析之各樓層應力指標 (弱軸單邊強軸雙邊配置斜撐;單 一樓層破壞;特徵分析) ...81 表 4.2 DLV 分析之各樓層應力指標 (弱軸單邊強軸雙邊配置斜撐;複 數樓層破壞;特徵分析) ...81 表 4.3 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配置斜撐;移 除受損層單邊斜撐;單一樓層破壞;特徵分析)...82 表 4.4 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配置斜撐;移 除受損層雙邊斜撐;單一樓層破壞;特徵分析)...82 表 4.5 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配置斜撐;移 除受損層單邊斜撐;複數樓層破壞;特徵分析)...83 表 4.6 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配置斜撐;移 除受損層雙邊斜撐;複數樓層破壞;特徵分析)...83 表 4.7 健康結構系統參數(input 於 x 向;SRIM 識別)...84 表 4.8 一樓受損結構系統參數(input 於 x 向;SRIM 識別)...85 表 4.9 二樓受損結構系統參數(input 於 x 向;SRIM 識別)...86 表 4.10 三樓受損結構系統參數(input 於 x 向;SRIM 識別)...87XII 表 4.11 四樓受損結構系統參數(input 於 x 向;SRIM 識別)...88 表 4.12 五樓受損結構系統參數(input 於 x 向;SRIM 識別)...89 表 4.13 DLV 分析之各樓層應力指標(單一樓層破壞;input 於 x 向; SRIM 識別) ...90 表 4.14 一樓及三樓受損結構系統參數(input 於 x 向;SRIM 識別)...91 表 4.15 二樓及四樓受損結構系統參數(input 於 x 向;SRIM 識別)...92 表 4.16 三樓及五樓受損結構系統參數(input 於 x 向;SRIM 識別)...93 表 4.17 DLV 分析之各樓層應力指標(複數樓層破壞;input 於 x 向; SRIM 識別) ...94 表 4.18 健康結構系統參數(input 於 y 向;SRIM 識別)...95 表 4.19 一樓受損結構系統參數(input 於 y 向;SRIM 識別)...96 表 4.20 二樓受損結構系統參數(input 於 y 向;SRIM 識別)...97 表 4.21 三樓受損結構系統參數(input 於 y 向;SRIM 識別)...98 表 4.22 四樓受損結構系統參數(input 於 y 向;SRIM 識別)...99 表 4.23 五樓受損結構系統參數(input 於 y 向;SRIM 識別)...100 表 4.24 DLV 分析之各樓層應力指標(單一樓層破壞;input 於 y 向; SRIM 識別) ...101 表 4.25 一樓及三樓受損結構系統參數(input 於 y 向;SRIM 識別).102 表 4.26 二樓及四樓受損結構系統參數(input 於 y 向;SRIM 識別).103 表 4.27 三樓及五樓受損結構系統參數(input 於 y 向;SRIM 識別).104 表 4.28 DLV 分析之各樓層應力指標(複數樓層破壞;input 於 y 向; SRIM 識別) ...105 表 5.1 鋼結構房屋模型結構系統參數 ...185 表 5.2 健康結構系統參數(弱軸單邊強軸雙邊配置斜撐;SRIM 系統識 別) ...186
XIII 表 5.3 單一樓層受損結構系統參數(弱軸單邊強軸雙邊配置斜撐;El Centro 地震波;SRIM 系統識別) ...187 表 5.4 位形空間 DLV 分析之各樓層應力指標 (弱軸單邊強軸雙邊配置 斜撐;單一樓層破壞;El Centro 地震波)...188 表 5.5 單一樓層受損結構系統參數(弱軸單邊強軸雙邊配置斜撐; Hachinohe 地震波;SRIM 系統識別) ...189 表 5.6 位形空間 DLV 分析之各樓層應力指標 (弱軸單邊強軸雙邊配置 斜撐;單一樓層破壞;Hachinohe 地震波)...190 表 5.7 單一樓層受損結構系統參數(弱軸單邊強軸雙邊配置斜撐;Kobe 地震波;SRIM 系統識別) ...191 表 5.8 位形空間 DLV 分析之各樓層應力指標 (弱軸單邊強軸雙邊配置 斜撐;單一樓層破壞;Kobe 地震波) ...192 表 5.9 複數樓層受損結構系統參數(弱軸單邊強軸雙邊配置斜撐;El Centro 地震波;SRIM 系統識別) ...193 表 5.10 位形空間 DLV 分析之各樓層應力指標 (弱軸單邊強軸雙邊配 置斜撐;複數樓層破壞;El Centro 地震波) ...194 表 5.11 複數樓層受損結構系統參數(弱軸單邊強軸雙邊配置斜撐; Hachinohe 地震波;SRIM 系統識別) ...195 表 5.12 位形空間 DLV 分析之各樓層應力指標 (弱軸單邊強軸雙邊配 置斜撐;複數樓層破壞;Hachinohe 地震波)...196 表 5.13 複數樓層受損結構系統參數(弱軸單邊強軸雙邊配置斜撐; Kobe 地震波;SRIM 系統識別)...197 表 5.14 位形空間 DLV 分析之各樓層應力指標 (弱軸單邊強軸雙邊配 置斜撐;複數樓層破壞;Kobe 地震波) ...198 表 5.15 健康結構系統參數(弱軸雙邊強軸單邊配置斜撐;SRIM 系統
XIV 識別) ...199 表 5.16 單一樓層受損結構系統參數(弱軸雙邊強軸單邊配置斜撐;El Centro 地震波;SRIM 系統識別) ...200 表 5.17 位形空間 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配 置斜撐;移除受損層雙邊斜撐;單一樓層破壞;El Centro 地震波) ...201 表 5.18 單一樓層受損結構系統參數(弱軸雙邊強軸單邊配置斜撐; Hachinohe 地震波;SRIM 系統識別) ...202 表 5.19 位形空間 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配 置斜撐;移除受損層雙邊斜撐;單一樓層破壞;Hachinohe 地震波) ...203 表 5.20 單一樓層受損結構系統參數(弱軸雙邊強軸單邊配置斜撐; Kobe 地震波;SRIM 系統識別)...204 表 5.21 位形空間 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配 置斜撐;移除受損層雙邊斜撐;單一樓層破壞;Kobe 地震波) ...205 表 5.22 複數樓層受損結構系統參數(弱軸雙邊強軸單邊配置斜撐;El Centro 地震波;SRIM 系統識別) ...206 表 5.23 位形空間 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配 置斜撐;移除受損層雙邊斜撐;複數樓層破壞;El Centro 地震波) ...207 表 5.24 複數樓層受損結構系統參數(弱軸雙邊強軸單邊配置斜撐; Hachinohe 地震波;SRIM 系統識別) ...208 表 5.25 位形空間 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配 置斜撐;移除受損層雙邊斜撐;複數樓層破壞;Hachinohe 地震波) ...209
XV 表 5.26 複數樓層受損結構系統參數(弱軸雙邊強軸單邊配置斜撐; Kobe 地震波;SRIM 系統識別)...210 表 5.27 位形空間 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配 置斜撐;移除受損層雙邊斜撐;複數樓層破壞;Kobe 地震波) ...211 表 5.28 狀態空間 DLV 分析之各樓層應力指標 (弱軸單邊強軸雙邊配 置斜撐;單一樓層破壞;El Centro 地震波) ...212 表 5.29 狀態空間 DLV 分析之各樓層應力指標 (弱軸單邊強軸雙邊配 置斜撐;單一樓層破壞;Hachinohe 地震波)...212 表 5.30 狀態空間 DLV 分析之各樓層應力指標 (弱軸單邊強軸雙邊配 置斜撐;單一樓層破壞;Kobe 地震波) ...213 表 5.31 狀態空間 DLV 分析之各樓層應力指標 (弱軸單邊強軸雙邊配 置斜撐;複數樓層破壞;El Centro 地震波) ...213 表 5.32 狀態空間 DLV 分析之各樓層應力指標 (弱軸單邊強軸雙邊配 置斜撐;複數樓層破壞;Hachinohe 地震波)...214 表 5.33 狀態空間 DLV 分析之各樓層應力指標 (弱軸單邊強軸雙邊配 置斜撐;複數樓層破壞;Kobe 地震波) ...214 表 5.34 狀態空間 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配 置斜撐;單一樓層破壞;El Centro 地震波) ...215 表 5.35 狀態空間 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配 置斜撐;單一樓層破壞;Hachinohe 地震波)...215 表 5.36 狀態空間 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配 置斜撐;單一樓層破壞;Kobe 地震波) ...216 表 5.37 狀態空間 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配 置斜撐;複數樓層破壞;El Centro 地震波) ...216 表 5.38 狀態空間 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配
XVI
置斜撐;複數樓層破壞;Hachinohe 地震波)...217 表 5.39 狀態空間 DLV 分析之各樓層應力指標 (弱軸雙邊強軸單邊配 置斜撐;複數樓層破壞;Kobe 地震波) ...217
XVII
圖目錄
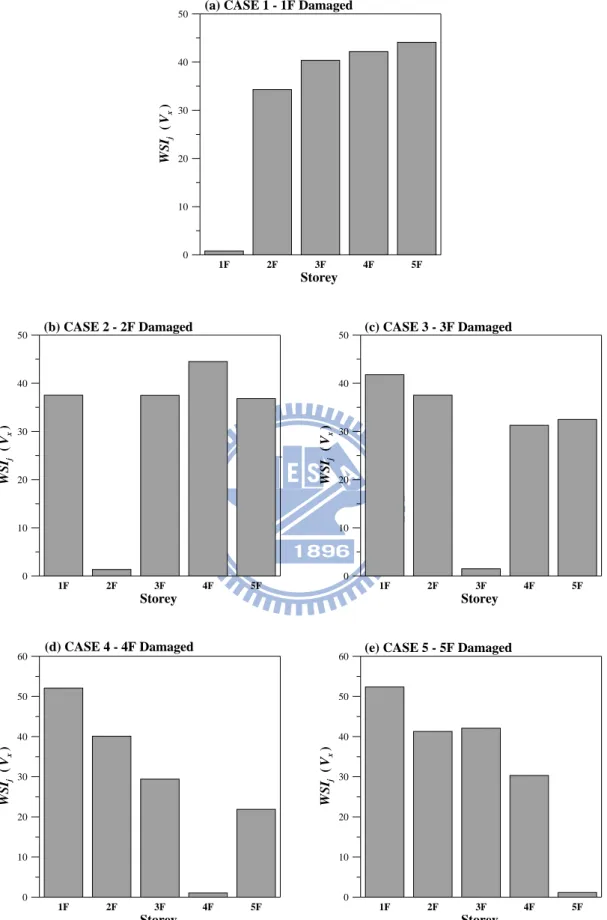
圖 2.1 奇異值分解之幾何概念 ...35 圖 2.2 各樓層加速規安裝示意圖 ...35 圖 2.3 三層樓扭轉耦合鋼構架之 ETABS 模型...36 圖 2.4 El Centro 地震加速度歷時(PGA=0.1g)...36 圖 2.5 三層樓結構各樓層角隅加速度歷時(x 向輸入)...37 圖 2.6 三層樓結構各樓層角隅加速度歷時(y 向輸入)...37 圖 2.7 三層樓結構各樓層質心加速度歷時(x 向輸入)...38 圖 2.8 三層樓結構各樓層質心加速度歷時(y 向輸入)...38 圖 2.9 三層樓結構之 x 向加速度傳遞函數與相位角(x 向輸入)...39 圖 2.10 三層樓結構之 y 向加速度傳遞函數與相位角(x 向輸入)...39 圖 2.11 三層樓結構之旋轉向加速度傳遞函數與相位角 (x 向輸入)..40 圖 2.12 三層樓結構之 x 向加速度傳遞函數與相位角(y 向輸入)...40 圖 2.13 三層樓結構之 y 向加速度傳遞函數與相位角(y 向輸入)...41 圖 2.14 三層樓結構之旋轉向加速度傳遞函數與相位角 (y 向輸入)..41 圖 2.15 系統識別分析與特徵分析之頻率比較 ...42 圖 4.1 DLV 結構破壞診斷之數值分析流程圖 ...106 圖 4.2 三層樓之扭轉耦合結構 ...107 圖 4.3 弱軸(x)單邊強軸(y)雙邊配置斜撐之平面斜撐配置 (移除弱軸斜 撐) ...107 圖 4.4 弱軸單邊強軸雙邊配置斜撐之五層樓扭轉耦合結構 ...108 圖 4.5 弱軸單邊強軸雙邊配置斜撐結構之 DLV 分析結果 (x 向之 WSIj) ...109 圖 4.6 弱軸單邊強軸雙邊配置斜撐結構之 DLV 分析結果 (x 向之 WSIj) ...110XVIII 圖 4.7 弱軸雙邊強軸單邊配置斜撐之五層樓扭轉耦合結構 ...111 圖 4.8 弱軸(x)雙邊強軸(y)單邊配置斜撐之平面斜撐配置 (移除弱軸單 邊斜撐) ...112 圖 4.9 弱軸(x)雙邊強軸(y)單邊配置斜撐之平面斜撐配置 (移除弱軸雙 邊斜撐) ...112 圖 4.10 弱軸雙邊強軸單邊配置斜撐結構之 DLV 分析結果 (移除弱軸 單邊斜撐;旋轉向之 WSIj)...113 圖 4.11 弱軸雙邊強軸單邊配置斜撐結構之 DLV 分析結果 (移除弱軸 雙邊斜撐;x 向之 WSIj) ...114 圖 4.12 弱軸雙邊強軸單邊配置斜撐結構之 DLV 分析結果 (移除弱軸 雙邊斜撐;旋轉向之 WSIj)...115 圖 4.13 弱軸雙邊強軸單邊配置斜撐結構之 DLV 分析結果 (移除弱軸 單邊斜撐;旋轉向之 WSIj)...116 圖 4.14 弱軸雙邊強軸單邊配置斜撐結構之 DLV 分析結果 (移除弱軸 雙邊斜撐;x 向之 WSIj) ...117 圖 4.15 弱軸雙邊強軸單邊配置斜撐結構之 DLV 分析結果 (移除弱軸 雙邊斜撐;旋轉向之 WSIj)...118 圖 4.16 健康結構之各樓層質心加速度歷時 (x 向輸入)...119 圖 4.17 一樓受損結構之各樓層質心加速度歷時 (x 向輸入)...120 圖 4.18 二樓受損結構之各樓層質心加速度歷時 (x 向輸入)...121 圖 4.19 三樓受損結構之各樓層質心加速度歷時 (x 向輸入)...122 圖 4.20 四樓受損結構之各樓層質心加速度歷時 (x 向輸入)...123 圖 4.21 五樓受損結構之各樓層質心加速度歷時 (x 向輸入)...124 圖 4.22 弱軸單邊強軸雙邊配置斜撐結構之 DLV 分析結果 (經由 x 向 地震反應識別;x 向之 WSIj) ...125
XIX 圖 4.23 一樓及三樓受損結構之各樓層質心加速度歷時 (x 向輸入)126 圖 4.24 二樓及四樓受損結構之各樓層質心加速度歷時 (x 向輸入)127 圖 4.25 三樓及五樓受損結構之各樓層質心加速度歷時 (x 向輸入)128 圖 4.26 弱軸單邊強軸雙邊配置斜撐結構之 DLV 分析結果 (經由 x 向 地震反應識別;x 向之 WSIj) ...129 圖 4.27 健康結構之各樓層質心加速度歷時 (y 向輸入)...130 圖 4.28 一樓受損結構之各樓層質心加速度歷時 (y 向輸入)...131 圖 4.29 二樓受損結構之各樓層質心加速度歷時 (y 向輸入)...132 圖 4.30 三樓受損結構之各樓層質心加速度歷時 (y 向輸入)...133 圖 4.31 四樓受損結構之各樓層質心加速度歷時 (y 向輸入)...134 圖 4.32 五樓受損結構之各樓層質心加速度歷時 (y 向輸入)...135 圖 4.33 弱軸單邊強軸雙邊配置斜撐結構之 DLV 分析結果 (經由 y 向 地震反應識別;x 向之 WSIj) ...136 圖 4.34 一樓及三樓受損結構之各樓層質心加速度歷時 (y 向輸入)137 圖 4.35 二樓及四樓受損結構之各樓層質心加速度歷時 (y 向輸入)138 圖 4.36 三樓及五樓受損結構之各樓層質心加速度歷時 (y 向輸入)139 圖 4.37 弱軸單邊強軸雙邊配置斜撐結構之 DLV 分析結果 (經由 y 向 地震反應識別;x 向之 WSIj) ...140 圖 5.1 振動台試驗分析流程 ...218 圖 5.2 地震模擬振動台 ...219 圖 5.3 振動台油壓致動器 ...219 圖 5.4 MTS 407 控制器 ...220 圖 5.5 IMC μ-MUCIS 資料擷取系統...220 圖 5.6 1:2 縮尺五層樓鋼構結構立面圖 ...221 圖 5.7 1:2 縮尺五層樓鋼構結構上視圖 ...221
XX 圖 5.8 弱軸單邊強軸雙邊配置斜撐之五層樓扭轉耦合結構 (健康結構) ...222 圖 5.9 各樓層質心加速度歷時反應 (El Centro;PGA=0.1g) (弱軸單邊 強軸雙邊配置斜撐;健康結構) ...223 圖 5.10 各樓層質心加速度歷時反應 (Hachinohe;PGA=0.1g) (弱軸單 邊強軸雙邊配置斜撐;健康結構) ...224 圖 5.11 各樓層質心加速度歷時反應 (Kobe;PGA=0.1g) (弱軸單邊強 軸雙邊配置斜撐;健康結構) ...225 圖 5.12 弱軸單邊強軸雙邊配置斜撐之五層樓扭轉耦合結構 (單一樓 層受損;移除一樓弱軸斜撐) ...226 圖 5.13 弱軸單邊強軸雙邊配置斜撐之五層樓扭轉耦合結構 (複數樓 層受損;移除一樓及三樓弱軸斜撐) ...226 圖 5.14 各樓層質心加速度歷時反應 (El Centro;PGA=0.05g) (弱軸單 邊強軸雙邊配置斜撐;一樓受損結構) ...227 圖 5.15 各樓層質心加速度歷時反應 (El Centro;PGA=0.05g) (弱軸單 邊強軸雙邊配置斜撐;二樓受損結構) ...228 圖 5.16 各樓層質心加速度歷時反應 (El Centro;PGA=0.05g) (弱軸單 邊強軸雙邊配置斜撐;三樓受損結構) ...229 圖 5.17 各樓層質心加速度歷時反應 (El Centro;PGA=0.05g) (弱軸單 邊強軸雙邊配置斜撐;四樓受損結構) ...230 圖 5.18 各樓層質心加速度歷時反應 (El Centro;PGA=0.05g) (弱軸單 邊強軸雙邊配置斜撐;五樓受損結構) ...231 圖 5.19 位形空間 DLV 分析結果(x 向或旋轉向之 WSIj) (弱軸單邊強軸 雙邊配置斜撐;單一樓層受損;El Centro) ...232 圖 5.20 各樓層質心加速度歷時反應 (Hachinohe;PGA=0.05g) (弱軸單
XXI 邊強軸雙邊配置斜撐;一樓受損結構) ...233 圖 5.21 各樓層質心加速度歷時反應 (Hachinohe;PGA=0.05g) (弱軸單 邊強軸雙邊配置斜撐;二樓受損結構) ...234 圖 5.22 各樓層質心加速度歷時反應 (Hachinohe;PGA=0.05g) (弱軸單 邊強軸雙邊配置斜撐;三樓受損結構) ...235 圖 5.23 各樓層質心加速度歷時反應 (Hachinohe;PGA=0.05g) (弱軸單 邊強軸雙邊配置斜撐;四樓受損結構) ...236 圖 5.24 各樓層質心加速度歷時反應 (Hachinohe;PGA=0.05g) (弱軸單 邊強軸雙邊配置斜撐;五樓受損結構) ...237 圖 5.25 位形空間 DLV 分析結果(x 向或旋轉向之 WSIj) (弱軸單邊強軸 雙邊配置斜撐;單一樓層受損;Hachinohe)...238 圖 5.26 各樓層質心加速度歷時反應 (Kobe;PGA=0.05g) (弱軸單邊強 軸雙邊配置斜撐;一樓受損結構) ...239 圖 5.27 各樓層質心加速度歷時反應 (Kobe;PGA=0.05g) (弱軸單邊強 軸雙邊配置斜撐;二樓受損結構) ...240 圖 5.28 各樓層質心加速度歷時反應 (Kobe;PGA=0.05g) (弱軸單邊強 軸雙邊配置斜撐;三樓受損結構) ...241 圖 5.29 各樓層質心加速度歷時反應 (Kobe;PGA=0.05g) (弱軸單邊強 軸雙邊配置斜撐;四樓受損結構) ...242 圖 5.30 各樓層質心加速度歷時反應 (Kobe;PGA=0.05g) (弱軸單邊強 軸雙邊配置斜撐;五樓受損結構) ...243 圖 5.31 位形空間 DLV 分析結果(x 向或旋轉向之 WSIj) (弱軸單邊強軸 雙邊配置斜撐;單一樓層受損;Kobe) ...244 圖 5.32 各樓層質心加速度歷時反應 (El Centro;PGA=0.05g) (弱軸單 邊強軸雙邊配置斜撐;一樓及三樓受損結構)...245
XXII 圖 5.33 各樓層質心加速度歷時反應 (El Centro;PGA=0.05g) (弱軸單 邊強軸雙邊配置斜撐;二樓及四樓受損結構)...246 圖 5.34 各樓層質心加速度歷時反應 (El Centro;PGA=0.05g) (弱軸單 邊強軸雙邊配置斜撐;三樓及五樓受損結構)...247 圖 5.35 位形空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸單邊強軸 雙邊配置斜撐;複數樓層受損;El Centro) ...248 圖 5.36 各樓層質心加速度歷時反應 (Hachinohe;PGA=0.05g) (弱軸單 邊強軸雙邊配置斜撐;一樓及三樓受損結構)...249 圖 5.37 各樓層質心加速度歷時反應 (Hachinohe;PGA=0.05g) (弱軸單 邊強軸雙邊配置斜撐;二樓及四樓受損結構)...250 圖 5.38 各樓層質心加速度歷時反應 (Hachinohe;PGA=0.05g) (弱軸單 邊強軸雙邊配置斜撐;三樓及五樓受損結構)...251 圖 5.39 位形空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸單邊強軸 雙邊配置斜撐;複數樓層受損;Hachinohe)...252 圖 5.40 各樓層質心加速度歷時反應 (Kobe;PGA=0.05g) (弱軸單邊強 軸雙邊配置斜撐;一樓及三樓受損結構) ...253 圖 5.41 各樓層質心加速度歷時反應 (Kobe;PGA=0.05g) (弱軸單邊強 軸雙邊配置斜撐;二樓及四樓受損結構) ...254 圖 5.42 各樓層質心加速度歷時反應 (Kobe;PGA=0.05g) (弱軸單邊強 軸雙邊配置斜撐;三樓及五樓受損結構) ...255 圖 5.43 位形空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸單邊強軸 雙邊配置斜撐;複數樓層受損;Kobe) ...256 圖 5.44 弱軸雙邊強軸單邊配置斜撐之五層樓扭轉耦合結構 (健康結 構) ...257 圖 5.45 各樓層質心加速度歷時反應 (El Centro;PGA=0.1g) (弱軸雙邊
XXIII 強軸單邊配置斜撐;健康結構) ...258 圖 5.46 各樓層質心加速度歷時反應 (Hachinohe;PGA=0.1g) (弱軸雙 邊強軸單邊配置斜撐;健康結構) ...259 圖 5.47 各樓層質心加速度歷時反應 (Kobe;PGA=0.1g) (弱軸雙邊強 軸單邊配置斜撐;健康結構) ...260 圖 5.48 弱軸雙邊強軸單邊配置斜撐之五層樓扭轉耦合結構 (單一樓 層受損;移除一樓弱軸雙邊斜撐) ...261 圖 5.49 弱軸雙邊強軸單邊配置斜撐之五層樓扭轉耦合結構 (複數樓 層受損;移除一樓及三樓弱軸雙邊斜撐) ...261 圖 5.50 各樓層質心加速度歷時反應 (El Centro;PGA=0.1g) (弱軸雙邊 強軸單邊配置斜撐;一樓受損結構) ...262 圖 5.51 各樓層質心加速度歷時反應 (El Centro;PGA=0.1g) (弱軸雙邊 強軸單邊配置斜撐;二樓受損結構) ...263 圖 5.52 各樓層質心加速度歷時反應 (El Centro;PGA=0.1g) (弱軸雙邊 強軸單邊配置斜撐;三樓受損結構) ...264 圖 5.53 位形空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸雙邊強軸 單邊配置斜撐;單一樓層受損;El Centro) ...265 圖 5.54 各樓層質心加速度歷時反應 (Hachinohe;PGA=0.1g) (弱軸雙 邊強軸單邊配置斜撐;一樓受損結構) ...266 圖 5.55 各樓層質心加速度歷時反應 (Hachinohe;PGA=0.1g) (弱軸雙 邊強軸單邊配置斜撐;二樓受損結構) ...267 圖 5.56 各樓層質心加速度歷時反應 (Hachinohe;PGA=0.1g) (弱軸雙 邊強軸單邊配置斜撐;三樓受損結構) ...268 圖 5.57 位形空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸雙邊強軸 單邊配置斜撐;單一樓層受損;Hachinohe)...269
XXIV 圖 5.58 各樓層質心加速度歷時反應 (Kobe;PGA=0.1g) (弱軸雙邊強 軸單邊配置斜撐;一樓受損結構) ...270 圖 5.59 各樓層質心加速度歷時反應 (Kobe;PGA=0.1g) (弱軸雙邊強 軸單邊配置斜撐;二樓受損結構) ...271 圖 5.60 各樓層質心加速度歷時反應 (Kobe;PGA=0.1g) (弱軸雙邊強 軸單邊配置斜撐;三樓受損結構) ...272 圖 5.61 位形空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸雙邊強軸 單邊配置斜撐;單一樓層受損;Kobe) ...273 圖 5.62 各樓層質心加速度歷時反應 (El Centro;PGA=0.1g) (弱軸雙邊 強軸單邊配置斜撐;一樓及三樓受損結構) ...274 圖 5.63 位形空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸雙邊強軸 單邊配置斜撐;複數樓層受損;El Centro) ...275 圖 5.64 各樓層質心加速度歷時反應 (Hachinohe;PGA=0.1g) (弱軸雙 邊強軸單邊配置斜撐;一樓及三樓受損結構)...276 圖 5.65 位形空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸雙邊強軸 單邊配置斜撐;複數樓層受損;Hachinohe)...277 圖 5.66 各樓層質心加速度歷時反應 (Kobe;PGA=0.1g) (弱軸雙邊強 軸單邊配置斜撐;一樓及三樓受損結構) ...278 圖 5.67 位形空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸雙邊強軸 單邊配置斜撐;複數樓層受損;Kobe) ...279 圖 5.68 狀態空間 DLV 分析結果(x 向或旋轉向之 WSIj) (弱軸單邊強軸 雙邊配置斜撐;單一樓層受損;El Centro) ...280 圖 5.69 狀態空間 DLV 分析結果(x 向或旋轉向之 WSIj) (弱軸單邊強軸 雙邊配置斜撐;單一樓層受損;Hachinohe)...281 圖 5.70 狀態空間 DLV 分析結果(x 向或旋轉向之 WSIj) (弱軸單邊強軸
XXV 雙邊配置斜撐;單一樓層受損;Kobe) ...282 圖 5.71 狀態空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸單邊強軸 雙邊配置斜撐;複數樓層受損;El Centro) ...283 圖 5.72 狀態空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸單邊強軸 雙邊配置斜撐;複數樓層受損;Hachinohe)...284 圖 5.73 狀態空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸單邊強軸 雙邊配置斜撐;複數樓層受損;Kobe) ...285 圖 5.74 狀態空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸雙邊強軸 單邊配置斜撐;單一樓層受損;El Centro) ...286 圖 5.75 狀態空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸雙邊強軸 單邊配置斜撐;單一樓層受損;Hachinohe)...287 圖 5.76 狀態空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸雙邊強軸 單邊配置斜撐;單一樓層受損;Kobe) ...288 圖 5.77 狀態空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸雙邊強軸 單邊配置斜撐;複數樓層受損;El Centro) ...289 圖 5.78 狀態空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸雙邊強軸 單邊配置斜撐;複數樓層受損;Hachinohe)...289 圖 5.79 狀態空間 DLV 分析結果(x 向及旋轉向之 WSIj) (弱軸雙邊強軸 單邊配置斜撐;複數樓層受損;Kobe) ...290
1
第 一 章 緒 論
1.1 研 究 動 機 與 目 的
臺 灣 位 於 環 太 平 洋 地 震 帶 上 , 由 於 受 到 歐 亞 大 陸 板 塊 及 菲 律 賓 海 板 塊 的 擠 壓 , 每 年 地 震 的 發 生 數 以 百 計 , 因 地 震 頻 繁 , 建 築 物 的 震 害 風 險 亦 相 對 較 高 。 在 經 歷 地 震 後 , 如 何 快 速 有 效 且 準 確 診 斷 結 構 可 能 的 破 壞 位 置 及 受 損 程 度 , 並 適 時 於 破 壞 處 給 予 適 當 的 加 勁 補 強 , 以 抵 禦 下 一 次 地 震 的 侵 襲 , 乃 現 代 土 木 結 構 工 程 上 的 熱 門 研 究 課 題 之 一 。 結 構 損 傷 探 測 的 觀 念 及 其 技 術 發 展,起 源 於 1960 年 代 軍 事 及 航 太 工 業 上 的 需 求 。 最 初 是 針 對 機 械 設 備 的 故 障 進 行 診 斷 , 後 來 逐 漸 發 展 並 廣 泛 應 用 於 其 他 領 域 。 結 構 損 傷 探 測 的 方 法 , 多 由 力 學 及 動 力 分 析 理 論 發 展 而 來 , 其 宗 旨 乃 在 不 破 壞 材 料 及 構 件 的 前 提 下 , 對 破 壞 位 置 及 損 傷 程 度 進 行 有 效 的 識 別 。 結 構 損 傷 探 測 的 判 斷 依 據 , 乃 由 其 力 學 或 動 力 特 性 , 以 及 位 移 等 異 常 變 化 做 為 參 考 依 據 。 常 見 的 非 破 壞 檢 測 方 法 多 以 聲 、 光 、 電 、 磁 學 等 原 理 激 發 結 構 反 應 來 擷 取 資 訊 進 行 損 傷 評 估 , 適 用 於 探 討 已 知 破 壞 材 料 及 構 件 的 破 壞 程 度 及 殘 餘 強 度 。 近 年 來 以 動 態 測 試 法 為 基 礎 進 行 結 構 損 傷 探 測 之 研 究 廣 受 注 目 。 動 態 測 試 法 乃 是 藉 由 激 發 結 構 產 生 振 動 , 利 用 模 態 分 析 為 基 礎 , 由 結 構 系 統 的 模 態 參 數 (頻 率 、 阻 尼 比 、 模 態 向 量 …等 )及 物 理 參 數 (勁 度 、 柔 度 …等 )之 變 化 找 出 可 能 的 破 壞 位 置 。2 隨 著 科 技 發 展 的 日 新 月 異 , 資 料 擷 取 技 術 及 分 析 方 法 日 益 成 熟 , 結 構 損 傷 探 測 的 發 展 也 逐 漸 受 到 重 視 。 藉 由 動 態 測 試 、 反 應 監 測 、 系 統 識 別 及 損 傷 探 測 等 技 術 為 基 礎 , 建 立 一 套 完 善 的 結 構 健 康 監 測 系 統 已 可 能 實 現 。 在 動 態 測 試 方 面 , 可 考 慮 以 人 為 敲 擊 或 藉 由 大 自 然 的 風 與 地 震 等 擾 動 激 發 結 構 之 動 態 行 為 , 作 為 後 續 系 統 識 別 之 資 料 來 源 。 在 反 應 監 測 方 面,利 用 感 應 計 (sensor)量 測 結 構 物 因 振 動 而 產 生 的 物 理 訊 號 (位 移、速 度 及 加 速 度 ),作 為 損 傷 探 測 分 析 之 依 據。在 系 統 識 別 方 面 , 則 宜 選 擇 可 直 接 利 用 量 測 訊 號 之 數 據 , 具 有 不 需 要 再 經 數 值 加 工 (積 分 或 微 分 )的 強 健 方 法。在 損 傷 探 測 方 面,宜 採 用 對 結 構 的 損 傷 有 高 度 敏 感 性 的 方 法 。 因 此 , 本 研 究 之 結 構 健 康 監 測 系 統 將 採 用 地 震 反 應 偵 測 資 料 , 選 擇 不 需 要 參 考 點 之 加 速 度 作 為 結 構 振 動 反 應 之 偵 測 物 理 量 , 並 利 用 SRIM 方 法 識 別 結 構 之 系 統 參 數 , 配 合 對 高 階 模 態 較 不 敏 感 的 柔 度 矩 陣 為 基 礎 之 DLV 法 進 行 損 傷 探 測,以 期 發 展 出 一 套 實 際 可 行 的 結 構 損 傷 探 測 技 術 。 許 多 建 築 結 構 受 限 於 基 地 現 況 或 基 於 功 能 的 考 量 , 因 而 產 生 結 構 之 不 對 稱 性 。 不 對 稱 結 構 會 產 生 明 顯 的 扭 轉 振 態 , 所 以 在 進 行 系 統 識 別 及 損 傷 探 測 時 , 針 對 平 面 結 構 (Plane Frame)所 發 展 的 方 法 未 必 適 用 , 因 此 必 須 加 以 修 正 。 本 研 究 將 針 對 一 座 單 跨 五 層 樓 鋼 結 構 模 型 , 其 中 之 三 面 框 架 各 樓 層 皆 以 斜 撐 加 勁 , 以 形 成 平 面 不 對 稱 之 扭 轉 耦 合 結 構 配 置 。 並 藉 由 拆 除 部 分 斜 撐 以 模 擬 樓 層 之 損 傷 狀 況 , 進 行 結 構 損 傷 探 測 分 析 及 振 動 台 試 驗 。
3
1.2 文 獻 回 顧
以 動 力 測 試 方 法 進 行 結 構 損 傷 探 測 是 近 年 來 廣 為 研 究 的 課 題。例 如,D.J Ewins【 1】根 據 結 構 動 力 學 的 基 本 觀 念 及 理 論 , 發 展 動 態 試 驗 及 系 統 識 別 等 技 術 , 並 定 義 多 項 指 標 , 將 動 態 試 驗 識 別 分 析 所 得 之 模 態 參 數 具 體 轉 換 為 工 程 分 析 的 參 考 依 據 。 Salawu【 2】則 藉 由 動 態 監 測 反 應 萃 取 系 統 頻 率 ,並 由 其 變 化 來 判 斷 結 構 系 統 是 否 受 損 。利 用 自 然 頻 率 (natural frequency) 和 模 態 (mode shape) 定 義 損 傷 指 標 進 行 破 壞 診 斷 的 研 究 包 括 Chen 和 Garba【 3】 等 人 由 桁 架 的 勁 度 折 減 進 行 損 傷 探 測 分 析 。 根 據 該 研 究 之 範 例 , 考 慮 結 構 之 前 三 模 態 即 可 準 確 計 算 出 勁 度 之 折 減 量 , 而 結 構 損 傷 所 造 成 的 頻 率 變 化 以 第 一 模 態 影 響 最 大 。 此 外 Lee 和 Shin【 4-5】提 出 以 梁 的 自 然 頻 率 與 模 態,以 及 損 傷 後 的 傳 遞 函 數 進 行 損 傷 探 測 分 析 。 該 研 究 也 利 用 數 值 模 擬 分 析 及 試 驗 證 明 其 可 行 性 。 Hoyos 和 Aktan【 6】 提 出 以 結 構 自 然 頻 率 及 模 態 建 立 模 態 柔 度 (modal flexibilities) 奠 定 以 柔 度 矩 陣 作 為 結 構 損 傷 探 測 之 基 礎。Toksoy 和 Aktan【 7】以 模 態 柔 度 進 行 橋 梁 結 構 的 破 壞 診 斷。Pandey 和 Biswas【 8-9】利 用 結 構 破 壞 前 與 破 壞 後 的 柔 度 矩 陣 變 化 , 成 功 的 應 用 在 I 型 梁 與 平 面 桁 架 之 損 傷 探 測 。 相 較 於 自 然 頻 率 及 模 態 , Zhao 和 DeWolf【 10】 針 對 彈 簧 質 塊 系 統 進 行 損 傷 探 測 的 靈 敏 度 分 析 , 發 現 模 態 柔 度 比 起 自 然 頻 率 及 模 態 , 在 損 傷 探 測 上 更 為 敏 感 , 也 較 適 合 作 為 損
4 壞 評 估 指 標 。
Bernal【 11】 於 2002 年 提 出 以 結 構 柔 度 矩 陣 之 變 化 為 基 礎 的 破 壞 定 位 向 量 法 (Method of Damage Locating Vectors;簡 稱 DLV 法 ), 依 其 訂 定 的 標 準 作 為 損 傷 探 測 判 斷 之 依 據 。 該 研 究 以 平 面 桁 架 結 構 進 行 分 析 , 探 討 多 重 位 置 破 壞 及 破 壞 程 度 的 損 傷 探 測,結 果 顯 示 DLV 法 可 準 確 的 判 斷 其 破 壞 位 置 。 Gao 等 人 【 12-13】 成 功 的 將 DLV 法 應 用 於 平 面 桁 架 及 立 體 桁 架 結 構 之 損 傷 探 測 上。 Duan 等 人【 14】分 別 針 對 多 自 由 度 彈 簧 質 塊 系 統 及 平 面 桁 架 結 構 以 DLV 損 傷 探 測 法 進 行 破 壞 診 斷 分 析 , 並 探 討 模 態 數 之 多 寡 對 識 別 分 析 結 果 的 影 響 。 該 研 究 指 出 , 當 結 構 系 統 有 兩 處 破 壞 時 , 考 慮 前 二 、 三 模 態 即 可 正 確 偵 測 出 破 壞 位 置 。 國 內 在 結 構 損 傷 探 測 的 研 究 也 有 些 具 體 成 果 。 柯 宏 明 【 15】以 ARX 模 式、振 態 疊 加 原 理 及 非 線 性 迴 歸 分 析,推 定 各 振 態 頻 率 、 阻 尼 比 及 有 效 參 數 , 並 輔 以 三 種 損 壞 評 估 指 標 δM(Maximum Softening)、 MAC(Modal Assurance Criterion)及 COMAC(Coordinate Modal Assurance Criterion)來 判 斷 破 壞 位 置 及 程 度 。 其 研 究 指 出 強 動 階 段 的 基 本 振 動 週 期 為 判 斷 結 構 破 壞 程 度 的 可 靠 指 標。劉 正 偉【 16】利 用 結 構 振 動 特 性 及 Graffi 線 彈 性 動 力 互 易 定 理 的 觀 念 , 結 合 頻 率 反 應 函 數 (Frequency Response Function; FRF), 識 別 敲 擊 激 振 所 得 之 訊 號 , 由 其 頻 率 及 模 態 參 數,進 行 梁 的 損 傷 探 測 分 析。其 分 析 結 果 顯 示 , 模 態 振 形 曲 率 變 化 指 標 (Method of Modal Curvature; MMC) 及 模 態 尺 度 因 子 (Modal Scale Factor;MSF)可 作 為 損 壞 程 度 的
5
判 斷 依 據。楊 淳 皓【 17】藉 由 動 態 參 數 識 別 結 構 之 模 態 參 數 , 進 行 建 築 結 構 層 間 損 壞 評 估 , 並 由 動 力 方 程 式 建 立 扭 轉 耦 合 結 構 層 間 損 壞 指 標 SDITC(Storey Damage Index of Torsionally-Coupled) 與 近 似 指 標 ASDI(Approximate Storey Damage Index of Torsionally-Coupled), 依 此 二 指 標 判 別 樓 層 損 壞 的 程 度 及 利 用 剛 心 位 置 的 變 化 判 斷 損 傷 之 桿 件 位 置 。 林 裕 家【 18】以 DLV 損 傷 識 別 法 進 行 全 域 性 損 害 檢 測,並 配 合 模 態 曲 率 變 化 量 評 估 局 部 性 損 害 , 藉 由 數 值 模 擬 分 析 及 試 驗 驗 證 DLV 法 可 準 確 診 斷 出 框 架 結 構 之 破 壞 位 置。涂 哲 維【 19】 將 DLV 法 應 用 於 抗 彎 構 架 系 統 之 損 傷 探 測 上,由 一 系 列 的 數 值 模 擬 分 析 及 振 動 台 試 驗 驗 證 此 方 法 在 抗 彎 構 架 系 統 之 可 行 性 。 陳 逸 軒 【 20】 利 用 DLV 損 傷 探 測 法 結 合 推 測 -適 應 過 濾 法 與 模 態 向 量 間 之 正 交 特 性 , 提 供 觀 測 不 足 的 問 題 解 決 方 法,並 透 過 數 值 範 例 及 振 動 台 試 驗 驗 證 其 實 際 應 用 的 可 行 性。 本 文 接 續 DLV 損 傷 探 測 法 的 研 究,將 其 擴 展 應 用 至 扭 轉 耦 合 結 構 之 損 傷 探 測 上 , 考 慮 單 一 樓 層 破 壞 及 多 重 樓 層 破 壞 的 情 況 , 進 行 數 值 模 擬 分 析 及 振 動 台 試 驗 驗 證 , 作 為 後 續 實 際 應 用 之 基 礎 。
1.3 論 文 架 構
本 論 文 共 分 六 章 , 各 章 內 容 分 別 如 下 所 述 : 第 一 章 為 緒 論 , 介 紹 研 究 動 機 與 目 的 、 文 獻 回 顧 及 論 文 架 構 。 第 二 章 為 SRIM 系 統 識 別 分 析,介 紹 其 理 論 推 導,並 以 範 例 比 較 此 法 與 ARX 模 式 之 優 劣。第 三 章 為 DLV 損 傷 探 測 法,介 紹 其 理 論 推6 導 , 以 及 由 結 構 模 態 參 數 建 構 系 統 柔 度 矩 陣 的 方 法 。 第 四 章 以 數 值 模 擬 分 析 驗 證 DLV 損 傷 探 測 法 應 用 於 扭 轉 耦 合 結 構 之 可 行 性 。 建 立 一 座 單 跨 五 層 樓 三 維 鋼 結 構 模 型 , 其 中 三 面 框 架 各 樓 層 皆 以 斜 撐 加 勁 造 成 平 面 不 對 稱 性 , 並 以 拆 除 斜 撐 模 擬 樓 層 之 破 壞 情 況 , 針 對 單 一 樓 層 及 雙 層 樓 層 破 壞 的 狀 況 進 行 探 討 。 並 以 地 震 加 速 度 反 應 資 料 識 別 結 構 參 數 及 進 行 破 壞 診 斷,以 示 範 DLV 損 傷 探 測 法 於 扭 轉 耦 合 結 構 之 應 用。此 外, 本 文 亦 探 討 針 對 僅 以 單 一 方 向 輸 入 地 震 波 之 識 別 分 析 結 果 進 行 損 傷 探 測 分 析 的 影 響。第 五 章 以 振 動 台 試 驗 驗 證 DLV 損 傷 探 測 法 於 扭 轉 耦 合 結 構 實 際 應 用 的 可 行 性 。 考 慮 結 構 於 單 一 樓 層 或 雙 樓 層 破 壞 之 情 況 , 並 以 若 干 不 同 地 震 波 做 為 輸 入 擾 動 進 行 識 別 及 破 壞 診 斷 分 析 。 第 六 章 為 結 論 與 建 議 。
7
第 二 章 SRIM 系 統 識 別 分 析 理 論
2.1 前 言
欲 掌 握 建 築 結 構 之 動 力 特 性 , 必 須 求 得 結 構 之 模 態 參 數 (自 然 頻 率 、 阻 尼 比 、 振 態 )或 物 理 參 數 (質 量 、 阻 尼 、 勁 度 矩 陣 )。然 而 真 實 結 構 十 分 複 雜 且 自 由 度 極 多,欲 直 接 求 得 實 際 結 構 之 質 量 、 阻 尼 及 勁 度 矩 陣 實 屬 不 易 。 系 統 識 別 技 術 的 目 的 , 即 在 藉 由 實 際 量 測 到 的 結 構 動 態 反 應 訊 號 以 及 大 自 然 的 風 力 、 地 震 或 人 為 敲 擊 等 輸 入 擾 動 , 依 據 結 構 動 力 學 所 發 展 之 理 論 , 推 算 結 構 系 統 之 動 力 參 數 , 作 為 數 值 模 擬 分 析 之 依 據 或 其 他 應 用 。 Juang 【 21 】 於 1997 年 提 出 信 息 矩 陣 之 系 統 辨 識 理 論 (system realization using information matrix; 簡 稱 SRIM)。 此 一 方 法 利 用 資 料 之 相 關 性 (data correlation), 於 輸 出 與 輸 入 資 料 之 狀 態 空 間 系 統 架 構 下 , 由 可 觀 測 矩 陣 ( observability matrix)與 Toeplitz 矩 陣 決 定 結 構 系 統 之 狀 態 空 間 矩 陣 (A、B、C 與 D), 進 而 推 算 系 統 之 模 態 參 數 , 並 用 於 後 續 之 結 構 損 傷 探 測 分 析 。 本 章 將 回 顧 SRIM 系 統 識 別 法 之 理 論 推 導 , 說 明 求 取 系 統 矩 陣 與 狀 態 空 間 影 響 矩 陣 之 方 法 , 及 萃 取 結 構 頻 率 、 阻 尼 比 與 振 態 等 模 態 參 數 。 此 外 , 並 以 一 數 值 範 例 針 對 SRIM 法 與 ARX 模 式 兩 種 系 統 識 別 方 法 進 行 比 較 。
8
2.2 SRIM 系 統 識 別 理 論 回 顧
考 慮 結 構 系 統 受 外 力 擾 動 下, n 個 自 由 度 之 位 形 空 間 運 動 方 程 式 , 以 二 階 常 微 分 系 統 方 程 式 表 示 為 : Mx(t) Ξx(t)Kx(t)Eu(t) (2.1) 其 中,M、Ξ 及 K 分 別 為 n n R 之 質 量、阻 尼 及 勁 度 矩 陣;x(t)、 ) (t x 與 x(t)分 別 為 n1 R 之 結 構 位 移 、 速 度 與 加 速 度 向 量 ; 1 ) (t Rr u 為 外 力 向 量,r 為 輸 入 外 力 之 數 量; E n r R 為 外 力 配 置 矩 陣 , 其 矩 陣 元 素 取 決 於 外 力 之 型 式 與 分 佈 。 式 (2.1)可 改 寫 為 狀 態 空 間 方 程 式 如 下 : ( ) ) ( ) ( ) ( ) ( ) ( 1 1 1 t t t t t t u E M 0 x x Ξ M K M I 0 x x z ( 2 . 2 ) 若 定 義 狀 態 向 量 ) ( ) ( ) ( t t t x x z (2.3) 則 式 (2.2)可 改 寫 成 : z(t)Acz(t)Bcu(t) (2.4) 其 中 , Ξ M K M I 0 Ac 1 1 , E M 0 Bc 1 (2.5)9 1 2 ) (t R n z 為 連 續 時 間 之 狀 態 向 量 ; n n c R 2 2 A 為 連 續 時 間 之 系 統 矩 陣 ; n r c R 2 B 為 連 續 時 間 之 輸 入 影 響 矩 陣 。 若 系 統 之 動 態 反 應 可 由 m 組 感 應 器 量 測 而 得 ( 如 位 移 計 、 速 度 計 、 加 速 規 等 ) , 則 輸 出 向 量y(t)可 表 示 如 下 : y(t)CD x(t)CV x(t)CA x(t) (2.6) 其 中,CD、CV 與CA分 別 為 Rmn之 位 移、速 度 與 加 速 度 輸 出 影 響 矩 陣 。 由 式 (2.1)求 解x(t)並 代 入 式 (2.6)可 得 :
( ) ) ( ) ( ) ( 1 1 1 t t t t D A V A CAM Eu x x Ξ M C C K M C C y ( 2 . 7 ) 或 y(t)Cz(t)Du(t) (2.8) 其 中 , C[CD CAM1K CV CAM1Ξ],DC M1E A (2.9) 1 ) (t Rm y 為 輸 出 向 量;CRm2n為 狀 態 輸 出 影 響 矩 陣; m r R D 為 直 接 傳 輸 矩 陣 。 由 於 量 測 資 料 為 離 散 之 型 式 , 故 須 將 連 續 時 間 之 狀 態 空 間 方 程 式 推 展 為 離 散 時 間 之 型 式 。 令 k kt( t 為 取 樣 週 期 ), 其 離 散 時 間 之 狀 態 空 間 方 程 式 可 表 示 成 : z(k1)Az(k)Bu(k) (2.10)10 y(k)Cz(k)Du(k) (2.11) 其 中 , 2 1 ) (k R n z 為 離 散 時 間 之 狀 態 向 量 ; 1 ) (k Rr u 為 外 力 輸 入 向 量 ; 1 ) (k Rm y 為 感 應 器 輸 出 向 量 ; n n R2 2 A 為 離 散 時 間 之 系 統 矩 陣; n r R 2 B 為 離 散 時 間 之 輸 入 影 響 矩 陣。若 取 樣 頻 率 高 於 最 大 等 效 阻 尼 自 然 頻 率 之 兩 倍 , 則 連 續 時 間 系 統 與 離 散 時 間 系 統 式 , 兩 者 可 相 互 轉 換 : AeAct, t c ) ln(A A (2.12a) B Ac1(AI)Bc,Bc (AI)1AcB (2.12b) 將 式 (2.10)疊 代 p 次 至 式 (2.11), 以 矩 陣 型 式 表 示 成 : ) 1 ( ) 2 ( ) 1 ( ) ( ) ( ) 1 ( ) 2 ( ) 1 ( ) ( 4 3 2 1 2 p k k k k k p k k k k p p p p u u u u D B CA B CA B CA D CB CAB D CB D z CA CA CAC y y y y ( 2 . 1 3 a ) 或 yp(k)Opz(k)Tpup(k) (2.13b) 其 中 ,
11 1 ) 1 ( ) 2 ( ) 1 ( ) ( ) ( mp p R p k k k k k y y y y y , 1 ) 1 ( ) 2 ( ) 1 ( ) ( ) ( rp p R p k k k k k u u u u u ( 2 . 1 4 a ) 1 2 p p CA CA CA C O , D B CA B CA B CA D CB CAB D CB D T 4 3 2 p p p p (2.14b) Op Rmp2n 為 可 觀 測 性 矩 陣 ( observability matrix ); rp mp p R T 為 Toeplitz 矩 陣,由 馬 可 夫 參 數 組 成;p 為 整 數,其 最 小 值 與 A 矩 陣 之 維 度 有 關 , 將 於 2.2.1 小 節 ( 計 算 A 矩 陣 ) 中 作 說 明 。 觀 察Op矩 陣 , 可 知 求 取 模 態 參 數 所 需 之 A 與 C 矩 陣 即 隱 含 於 其 中 , 此 乃 萃 取 A 與 C 矩 陣 之 關 鍵 。 以 k+1 為 起 點 , 將 式 (2.10)疊 代 p 次 至 式 (2.11), 重 複 至 k+N-1 為 起 點 ( 共 N 次 ), 可 得 式 (2.13b)合 併 後 之 擴 大 型 式 : Yp(k)OpZ(k)TpUp(k) (2.15) 其 中 , mp N p p p p R N p k p k p k N k k k N k k k N k k k k ) 2 ( ) ( ) 1 ( ) ( ) 2 ( ) 1 ( ) 1 ( ) 1 ( ) ( ] ) 1 ( ) 1 ( ) ( [ ) ( y y y y y y y y y y y y Y
12 rp N p p p p R N p k p k p k N k k k N k k k N k k k k ) 2 ( ) ( ) 1 ( ) ( ) 2 ( ) 1 ( ) 1 ( ) 1 ( ) ( ] ) 1 ( ) 1 ( ) ( [ ) ( u u u u u u u u u u u u U Z(k)
z(k) z(k 1) z(k N 1)
R2nN ( 2 .1 6 ) N 為 資 料 長 度 減 p。 由 於 Yp(k)與 Up(k)皆 由 已 知 的 輸 出 與 輸 入 量 測 資 料 組 成 , 可 藉 由 兩 者 之 相 關 性 可 求 得 Op 矩 陣 , 其 自 相 關 ( autocorrelation) 與 互 相 關 ( cross-correlation) 矩 陣 定 義 如 下 : Ryy (1/N)Yp(k)YpT(k) Ryu (1/N)Yp(k)UTp(k) Ruu (1/N)Up(k)UTp(k) Ryz (1/N)Yp(k)ZT(k) ( 2 . 1 7 ) Rzz (1/N)Z(k)ZT(k) Rzu (1/N)Z(k)UTp(k) 其 中 , 對 稱 矩 陣 mp mp yy R R 、 rp rp uu R R 與 n n zz R 2 2 R 分 別 為 輸 出 觀 測 矩 陣 Yp(k)、 輸 入 矩 陣Up(k)及 未 知 狀 態 矩 陣 Z(k)的 自 相 關 矩 陣 ; 矩 陣 mp rp yu R R 、 mp n yz R 2 R 與 n rp zu R 2 R 分 別 為 輸 出 觀 測 矩 陣Yp(k)對 於 輸 入 矩 陣Up(k)、 輸 出 觀 測 矩 陣 Yp(k)對 於 未 知 狀 態 矩 陣 Z(k)矩 陣 及 未 知 狀 態 矩 陣 Z(k)矩 陣 對 於 輸 入 矩 陣Up(k)矩 陣 的 互 相 關 矩 陣 。2.2.1 萃 取 A 和 C 矩 陣
由 式 (2.15)左 右 兩 邊 乘 上(1/N)UTp(k)可 得 :13 Ryu OpRzu TpRuu (2.18) 若 1 uu R 為 非 奇 異 矩 陣 , 則 由 式 (2.18)可 得 : Tp [Ryu OpRzu]Ruu1 (2.19) 同 樣 地 , 於 式 (2.15)左 右 兩 邊 乘 上(1/N)YTp(k)可 得 : Ryy OpRTyz TpRTyu (2.20) 又 於 式 (2.15)左 右 兩 邊 乘 上(1/N)ZT(k)可 得 : Ryz OpRzz TpRTzu (2.21) 再 將 式 (2.19)之Tp代 入 式 (2.20)與 式 (2.21)移 項 整 理 後 可 得 : Ryy RyuRuu1RTyu Op(Rzz RzuRuu1RTzu)OTp ( 2 . 2 2 ) 茲 定 義 T yu uu yu yy hh R R R R R 1 , T zu uu zu zz zz R R R R R~ 1 則 式 (2.22)可 簡 化 為 : Rhh OpR~zzOTp (2.23) 對 mp mp hh R
R 作 奇 異 值 分 解( singular value decomposition;簡 稱 SVD) :
n n nT T n n n T hh V V U S V S 0 0 S U U USV R 0 0 0 ( 2 . 2 4 ) 其 中 , mp n n R 2 U 為 T hh hhR R 之 非 零 特 徵 值 所 對 應 之 單 位 特 徵 向 量 ; 0 0 n mp R U 為 T hh hhR R 之 奇 異 值 所 對 應 之 單 位 特 徵 向 量 ,14 n mp n0 2 ; n n n R 2 2 S 為 T hh hhR R 之 非 零 特 徵 值 所 組 成 之 對 角 矩 陣; 0 0 0 n n R S 為 T hh hhR R 之 奇 異 值 所 組 成 之 對 角 矩 陣;VnRmp2n 為 T hh hhR R 之 非 零 特 徵 值 所 對 應 之 單 位 特 徵 向 量 ; 0 0 n mp R V 為 hh T hhR R 之 奇 異 值 所 對 應 之 單 位 特 徵 向 量 。 SVD 分 解 的 主 要 幾 何 概 念 如 圖 2.1 所 示,其 中 矩 陣 U 及 V 分 別 為 T hh hhR R 與 T hh hhR R 之 特 徵 向 量 所 組 成 之 座 標 轉 換 矩 陣,且 U 及 V 皆 為 正 交 矩 陣 ; 而 矩 陣 S 為 RhhRThh或 T hh hhR R 之 奇 異 值 所 組 成 之 對 角 矩 陣 。 比 較 式 (2.23)與 式 (2.24)可 知 : Op Un (2.25a) 以 及 R~zz Sn (2.25b) 換 言 之 , 可 觀 測 性 矩 陣Op可 由Rhh矩 陣 之 奇 異 值 分 解 ( SVD) 求 得,此 為 求 取 A 與 C 矩 陣 之 關 鍵。以 下 將 進 一 步 說 明 如 何 由Op矩 陣 求 取 A 與 C 矩 陣 : 1 3 2 :) , : 1 ( p p m pm CA CA CA CA O , 2 2 :) , ) 1 ( : 1 ( p p p m CA CA CA C O (2.26) 其 中 ,Op(m1: pm,:)代 表 第 m+1 至 pm 列 和 所 有 行 向 量 所 組 成 之 矩 陣 ;Op(1:(p1)m,:)代 表 第 1 至 (p-1)×m 列 和 所 有 行 向 量 所 組 成 之 矩 陣 。
15 將 式 (2.26)改 寫 成 : A O A CA CA CA C CA CA CA CA O ( 1: ,:) (1:( 1) ,:) 2 2 1 3 2 m p pm m p p p p ( 2 . 2 7 ) 由 式 (2.27)即 可 求 得 A 矩 陣 : A Op(1:(p1)m,:)Op(m1: pm,:) (2.28) 其 中 , m p n T p p T p p p m p m p m R ) 1 ( 2 1 :) , ) 1 ( : 1 ( :)] , ) 1 ( : 1 ( :) , ) 1 ( : 1 ( [ O O O O 為Op的 擬 逆 ( pseudoinverse) 矩 陣 , 而 整 數 p 之 最 小 值 , 則 需 滿 足Op(1:(p1)m,:)的 秩 ( rank) 等 於 或 大 於 2n: (p1)m2n (2.29a) 或 2 1 m n p (2.29b) 觀 察Op矩 陣 可 知 , 其 前 m 列 即 為 C 矩 陣 : COp(1:m,:) (2.30) 上 述 過 程 說 明,可 由 已 知 的 輸 出 資 料 組 成 之Yp(k)矩 陣 與 輸 入 資 料 組 成 之Up(k)矩 陣 二 者 的 相 關 性 , 經 SVD 分 解 後 求 得Op
16 矩 陣 , 進 而 萃 取 出 系 統 未 知 的 A 與 C 矩 陣 。
2.2.2 萃 取 B 和 D 矩 陣
觀 察 式 (2.14b)之Tp矩 陣 , 可 知 B 與 D 矩 陣 即 隱 含 於 其 中 。 於 式 (2.18)前 乘 T 0 U 可 得 : UT0Ryu UT0OpRzu U0TTpRuu ( 2 .3 1 ) 由 於Op Un, 且 根 據 T 0 U 與Un之 正 交 性 可 得 : UT0Ryu UT0TpRuu (2.32) 將 式 (2.32)後 乘 1 uu R 可 改 寫 成 : UT0Tp UT0RyuRuu1 (2.33) 將 未 知 之Tp矩 陣 分 成 p 個 子 矩 陣 : Tp [Tp(:,1:r) Tp(:,r1:2r) Tp(:,(p1)r 1: pr)] ( 2 . 3 4 ) 其 中 , 由 式 (2.14b)與 式 (2. 25a)可 推 得 :17 D 0 T B U D 0 T B U D 0 T B U D T r m p p n r m p n r m p n p pr r p m p r r m p r r m p r ) 1 ( 2 ] : 1 ) 1 ( [:, :] , ) 3 ( : 1 [ ) 3 : 1 2 (:, :] , ) 2 ( : 1 [ ) 2 : 1 (:, :] , ) 1 ( : 1 [ ) : 1 (:, (2 .35) 再 將 式(2.35)前 乘 T 0 U 改 寫 成 : D U T U B U U D U T U B U U D U T U B U U D U T U ] : 1 ) 1 ( [:, ] : 1 ) 1 ( [:, :] , ) 3 ( : 1 [ ) : 1 3 (:, ) 3 : 1 2 (:, ) 3 : 1 2 (:, :] , ) 2 ( : 1 [ ) : 1 2 (:, ) 2 : 1 (:, ) 2 : 1 (:, :] , ) 1 ( : 1 [ ) : 1 (:, ) : 1 (:, ) : 1 (:, 0 0 0 0 0 0 0 0 0 0 0 pm m p pr r p m p pm m m m r r m p pm m m m r r m p pm m m r T p T n T T p T n T T p T n T T p T ( 2 . 3 6 a ) 或 U0T U0nDB (2.36b) 其 中 ,
18 ] : 1 ) 1 ( [:, ) 3 : 1 2 (:, ) 2 : 1 (:, ) : 1 (:, 0 0 0 0 0 pr r p r r r r r p T p T p T p T T T U T U T U T U U (2.37a) 0 U U U U U U U U U U U :] , ) 3 ( : 1 [ ) : 1 3 (:, :] , ) 2 ( : 1 [ ) : 1 2 (:, :] , ) 1 ( : 1 [ ) : 1 (:, ] : 1 ) 1 ( [:, ) 3 : 1 2 (:, ) 2 : 1 (:, ) : 1 (:, 0 0 0 0 0 0 0 0 m pm p m m p pm m m p pm m pm m p m m m m m n T n T n T T T T T n (2.37b) 由 於Tp為 未 知 矩 陣 , 因 此 式(2.37a)中 之 TΤp U0 亦 未 知 矩 陣 。 茲 根 據 式(2.33)將 其 改 寫 為 : ] : 1 ) 1 ( [:, ) 3 : 1 2 (:, ) 2 : 1 (:, ) : 1 (:, 1 0 1 0 1 0 1 0 0 pr r p r r r r r uu yu T uu yu T uu yu T uu yu T T R R U R R U R R U R R U U (2.38) 則 , 由 式(2.36b)即 可 求 得 B 與 D 矩 陣 , 亦 即 BD U*0nU0T (2.39) 其 中 之 前 m 列 即 為 矩 陣 DRmr ; 最 後 2n 列 即 為 矩 陣 r n R 2 B ; ( 2 ) 0 0 1 0 0 * 0 ( ) pn n m T n n T n n R U U U U 為 U0n 之 擬 逆 (pseudoinverse) 矩 陣 。
19