國立交通大學
電機與控制工程學系
博士論文
一款菱形四輪可傾窄車之多體系統建模與使用
QFT/H
∞方法之強健雙迴路
PID 傾斜動作控制器
設計
Multibody Modeling and Robust Double-loop PID Tilting
Motion Controller Design by Using QFT/H
∞Theorem for a
Diamond-shaped Narrow Tilting Vehicle
研 究 生:陳志良
一款菱形四輪可傾窄車之多體系統建模與使用
QFT/H
∞方法之強健雙迴路
PID 傾斜動作控制器設計
Multibody Modeling and Robust Double-loop PID Tilting
Motion Controller Design by Using QFT/H∞ Theorem for a
Diamond-shaped Narrow Tilting Vehicle
研 究 生:陳志良 Student:Chih-Liang Chen 指導教授:邱俊誠 教授 Advisor:Prof. Jin-Chern Chiou
國立交通大學 電機學院 電機與控制工程學系
博士論文
A Dissertation
Submitted to Department of Electrical and Control Engineering College of Electrical and Computer Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Doctor of Philosophy
in
Electrical and Control Engineering
Octorber 2008
Hsinchu, Taiwan, R.O.C
一款菱形四輪可傾窄車之多體系統建模與使用
QFT/H
∞方
法之強健雙迴路
PID 傾斜動作控制器設計
研究生:陳志良 指導教授:邱俊誠 教授 國立交通大學電機與控制工程學系 摘要 本論文介紹一款著眼於解決石油短缺、污染與交通壅塞的電動菱形四輪可傾 窄車,稱為IPM (Intelligent Personal Mobility),此車具輕與窄的特性,車身具有傾斜功能。為分析一些冒險的行駛狀況,本文中利用平面多體系統方法對IPM 建 立模型;本論文中也推導出一可用於平面多體系統之輪胎力模型;而為了實驗地 驗證此IPM 多體模型,本文並提出一種可用於菱形四輪可傾窄車行進間的輪胎負 載之算法(藉由利用兩個加速規與一個角度量測器)。此多體系統模型經由與實車 曲行測試比較驗證,此一模型並可以分析車體各主要部件間連結作用力並可輔助 控制器設計。 本文中利用結合 QFT/H∞方法設計一可對抗路面干擾之 IPM 傾斜動作控制 器,並提出一系統方法將此控制器轉換為較易實現的強健雙迴路 PID 控制器
(robust double-loop PID controller),而該雙迴路 PID 控制器被經由已驗證之多體系 統模型驗證其特性,其具有對於來自路面干擾和不完全傾斜命令(完全傾斜命令可 使得駕駛位置所受到重力回覆力矩與向心力翻覆力矩接近平衡)之負載干擾抵抗 力,並具有對傾斜動作之高循跡強健性(high tracking robustness)。
Multibody Modeling and Robust Double-loop PID Tilting Motion Controller Design by Using QFT/H∞ Theorem for a Diamond-shaped Narrow Tilting
Vehicle
Chen Chih-Liang (Department of Electrical and Control Engineering) Dissertation directed by Professor Chiou, Jin-Chern
Abstract
In this dissertation, a personal electric narrow tilting vehicle (NTV) called “IPM (intelligent personal mobility)” is developed to solve problem of oil shortage, pollution and traffic jam. The vehicle has four wheels arranged in a diamond shape. It is capable of operating in vehicular tilts with less weight and width. In order to simulate hazardous driving conditions, IPM was built a model by using planar multibody system method. A planar multibody system tire model was proposed to represent ground-vehicle interaction. In order to verify the IPM multibody model experimentally, we also proposed a separate calculation method using two acceleration sensors and one angular position sensor for the purpose of obtaining ground forces. The multibody model was verified by comparing with the real IPM in designed slalom tests. It matched with the real vehicle effectively and accurately. This model can applied to analyze the joint reaction force of IPM to assist in controller design.
An IPM tilting motion controller designed by using Quantitative Feedback Theory (QFT) and H∞ theory was proposed in this dissertation. For implement purpose, this
controller was systematically translated into a double-loop PID controller (two loop PID control, one tilting position control loop enclosed one tilting rate control loop). The controller was verified by working with the verified IPM multibody model. After the verification, the designed controller was verified that it has high tracking
robustness. It also was verified it can resist the load disturbance from lumpy roads and inadequate tilting command (Focus on driver position, if the gravity antiroll torque can balance with the centripetal force rollover torque, it is called adequate tilting command.) by working with the verified model.
誌謝
這本論文能夠完成,首先要感謝指導教授邱俊誠老師在這幾年的指導,在研 究上給予我相當多的啟示與協助,不僅是在課業上知識的獲得,更教導了我許多 的學習及做人做事應有的態度及精神,使我收穫良多受益匪淺。謝謝您,老師! 感謝各位口試委員給予我論文上的指導與建議,才能讓我的論文更完整。 感謝工研院機械所智慧車輛組彭毓瑩經理、簡明溫經理、高天和先生、劉達 全博士、簡金品先生、張智崇先生、李承和先生、鍾鵬文先生、林晃民先生、林 安宏先生、林保成先生等先進,對於本人在研究上的幫助,讓我的研究更加順利。 感謝學長吳順德教授在論文寫作上的指導。 感謝幫助過我的所有學長姐、學弟妹、同學與朋友,感謝實驗室林永峻學長、 振鈞、尚瑋、禮忠、冠州、志瑋、君穎,在求學過程中,有你們從旁協助,才使 得實驗可以順利進行,生活可以多采多姿。 最後要感謝我的父母和家人,一直以來總是給予我最大的支持,讓我無後顧 之憂的專心於研究,順利完成論文。 僅將此論文獻給大家,謝謝大家對我的各項幫助。 陳志良 謹識 中華民國九十七年十月 新竹 交大目錄
中文摘要...I 英文摘要... II 誌謝...IV 目錄... V 表目錄... VII 圖目錄... VIII 第一章 序論 ...1 1.1 研究背景 ...1 1.2 多體學系統(Multibody System)...41.3 定量反饋理論(Quantitative Feedback Theory , QFT) ...6
1.4 H∞控制理論...6 第二章 車體架構與建模 ...8 2.1 IPM雛型車設計與製造 ...8 2.2 抗翻覆能力 ... 11 2.3 多體翻轉模型 ...12 2.4 輪胎力模型 ...14 2.5 模型之運動方程(Equations of Motion) ...16 第三章 模型驗證 ...18 3.1 計算地面力(Ground Forces)...18 3.2 曲行測試(Slalom Test)...21 3.3 結果 ...23 3.4 模型應用 ...29 3.4.1 控制器設計 ...29 3.4.2 機械系統設計 ...30 第四章 傾斜運動控制器設計 ...32 4.1 傾斜運動之簡化與線性化 ...32 4.2 使用結合QFT/ H∞理論之控制器設計...36 4.2.1 時域規格 ...38 4.2.2 定義上下邊界 ...38 4.2.3 H∞傾斜速度控制器...39 4.2.4 確認控制器規格 ...41 4.3 強健雙迴路PID控制器設計...43 第五章 控制器驗證 ...48 5.1 路面干擾輸入 ...48
5.2 兩設計控制器之比較與驗證 ...49 5.2.1 強健雙迴路PID控制器與QFT/H∞控制器之比較...50 5.2.2 強健雙迴路PID控制器之驗證...56 5.2.3 內部影響的考量 ...66 第六章 結論 ...71 6.1 總結 ...71 6.2 貢獻 ...71 6.2.1 平面多體系統輪胎力模型 ...71 6.2.2 IPM NTV之翻轉平面多體模型...71 6.2.3 施加於IPM NTV之地面力算法...72 6.2.4 IPM NTV傾斜動作模型之簡化與線性化...72 6.2.5 IPM NTV之強健雙迴路PID傾斜動作控制器 ...72 6.3 對未來研究之建議 ...73 附錄一...74 附錄二...76 附錄三...79 附錄四...86 附錄五...88 附錄六...89 附錄七...95 附錄八...98 參考文獻...109 學經歷... 114 著作... 115
表目錄
表1 模型與實車之質心位置(靜平衡) ...23 表2 傾斜動作動態方程中,各變數的變化範圍 ...36 表3 QFT/H∞控制系統與強健雙迴路控制系統之Gm、Wg、Pm與Wp...47 表4 接頭、接頭種類、約束方程數和其連接之體 ...77 表5 圖 11 中,體(body)之質心初始位置、質量、轉動慣量...95 表6 圖 11 中,懸吊系統之原長度、彈簧常數與阻尼係數 ...95 表7 圖 11 中,輪胎之原截面高度、彈簧常數與阻尼係數 ...95 表8 圖 11 中,懸吊系統對應其連接之體的初始相對位置 ...96 表9 圖 11 中,輪胎對應其連接之輪框的初始相對位置 ...96圖目錄
圖 1 NTV之概念...2 圖 2 多體系統之舉例 ...5 圖 3 具有系統不確定性之二自由度QFT迴饋控制系統...6 圖 4 標準H∞控制器之系統架構...7 圖 5 IPM幾何尺寸 ...9 圖 6 定點迴轉示意圖 ...9 圖 7 簡易IPM翻轉模型 ...10 圖 8 簡易IPM左轉翻轉模型. ...10 圖 9 組裝之IPM ... 11 圖10 三維IPM多體模型 ...13 圖11 IPM翻轉平面多體模型(前視圖)...13 圖12 點Pi之卡氏座標(Cartesian coordinates)...14 圖13 輪胎模型之截面視圖 ...15 圖14 作用在輪框之輪胎力模型 ...15 圖15 計算作用在輪框之輪胎力的流程圖 ...16 圖16 IPM運動學運動 ...19 圖17 質心在運動學運動後之近似位置 ...19 圖18 計算IPM質心近似位置之流程圖 ...20 圖19 計算地面力之流程圖 ...21 圖20 規劃之曲行測試 ...22 圖21 不具傾斜動作之曲行測試 ...23 圖22 具傾斜動作之曲行測試 ...23 圖23 實車與模型不具傾斜動作之mb1翻滾角(roll angle) ...25 圖24 實車與模型具傾斜動作之mb1翻滾角(roll angle) ...26 圖25 實車與模型不具傾斜動作之mb2翻滾角(roll angle) ...27 圖26 實車與模型具傾斜動作之mb2翻滾角(roll angle) ...28 圖27 模型不具傾斜動作時,約束Jr,d作用在mb1之扭力...29 圖28 模型具傾斜動作時,約束Jr,d作用在mb1之扭力...30 圖29 模型不具傾斜動作時,接頭J2作用在mb1的反作用力...31 圖30 模型具傾斜動作時,接頭J2作用在mb1的反作用力...31 圖31 簡化之傾斜機構 ...34 圖32 IPM過彎示意圖 ...34 圖33 IPM傾斜動作簡化模型 ...35 圖34 片段的IPM傾斜動作 ...35圖35 全系統之控制器設計 ...37 圖36 QFT/H∞控制器設計流程圖...37 圖37 混合靈敏度之H∞ 最佳化問題 ...41 圖38 IPM傾斜動作之QFT/H∞控制系統...41 圖39 上下邊界函數與QFT/ H∞控制系統之頻率響應...42 圖40 上下邊界函數與QFT/ H∞控制系統之步階響應(Step Response)...42 圖41 強健雙迴路PID傾斜動作控制系統...44 圖42 強健雙迴路PID控制器之設計流程圖...45 圖43 上下邊界函數與無前置濾波器強健雙迴路PID控制系統之頻率響應...46 圖44 上下邊界函數與具前置濾波器強健雙迴路PID控制系統之頻率響應...46 圖45 QFT/H∞控制系統與強健雙迴路PID控制系統之頻率響應比較 ...47 圖46 IPM遭受路面干擾 ...48 圖47 簡化之路面干擾 ...49 圖48 曲行測試之傾斜動作與其施加扭力(強健雙迴路PID與QFT/H∞,完全傾斜命令, 不具路面干擾)...52 圖49 曲行測試之傾斜動作與其施加扭力(強健雙迴路PID與QFT/H∞,不完全傾斜命 令,不具路面干擾)...53 圖50 直行經路面干擾(A=0.02m, L=0.4m)之傾斜動作 (強健雙迴路PID與QFT/H∞)...54 圖51 曲行測試經路面干擾(A=0.02m, L=0.2m)之傾斜動作(強健雙迴路PID與Q 完全傾斜命令)...54 FT/H∞, FT/H∞, ) FT/H∞, 圖52 曲行測試經路面干擾(A=0.02m, L=0.4m)之傾斜動作(強健雙迴路PID與Q 完全傾斜命令)...55 圖53 曲行測試之傾斜動作(一般雙迴路PID與QFT/H∞,完全傾斜命令,不具路面干擾 ...55 圖54 曲行測試經路面干擾(A=0.02m, L=0.4m)之傾斜動作(一般雙迴路PID與Q 完全傾斜命令)...56 圖55 曲行測試經路面干擾(A=0.02m, L=0.2m)之傾斜動作(強健雙迴路PID,完全傾斜命 令,6.0m/s與 8.0m/s) ...58 圖56 曲行測試經路面干擾(A=0.02m, L=0.2m)之傾斜動作(強健雙迴路PID,完全傾斜命 令,10.0m/s與 12.0m/s) ...59 圖57 曲行測試經路面干擾(A=0.02m, L=0.4m)之傾斜動作(強健雙迴路PID,完全傾斜命 令,6.0m/s與 8.0m/s) ...60 圖58 曲行測試經路面干擾(A=0.02m, L=0.4m)之傾斜動作(強健雙迴路PID,完全傾斜命 令,10.0m/s與 12.0m/s) ...61 圖59 曲行測試經路面干擾(A=0.02m, L=0.2m)之傾斜動作(強健雙迴路PID,不完全傾斜 命令,6.0m/s與 8.0m/s) ...62 圖60 曲行測試經路面干擾(A=0.02m, L=0.2m)之傾斜動作(強健雙迴路PID,不完全傾斜 命令,10.0m/s與 12.0m/s) ...63
圖61 曲行測試經路面干擾(A=0.02m, L=0.4m)之傾斜動作(強健雙迴路PID,不完全傾斜 命令,6.0m/s與 8.0m/s) ...64 圖62 曲行測試經路面干擾(A=0.02m, L=0.4m)之傾斜動作(強健雙迴路PID,不完全傾斜 命令,10.0m/s與 12.0m/s) ...65 圖63 直行經路面干擾(A=0.02m, L=0.4m)之傾斜動作(考慮內部影響) ...67 圖64 曲行測試無經路面干擾之傾斜動作(考慮內部影響,完全與不完全傾斜命令) ..68 圖65 曲行測試經路面干擾(A=0.02m, L=0.2m)之傾斜動作(考慮內部影響,完全傾斜命 令)...69 圖66 曲行測試經路面干擾(A=0.02m, L=0.4m)之傾斜動作(考慮內部影響,完全傾斜命 令)...69 圖67 曲行測試經路面干擾(A=0.02m, L=0.2m)之傾斜動作(考慮內部影響,不完全傾斜 命令)...70 圖68 曲行測試經路面干擾(A=0.02m, L=0.4m)之傾斜動作(考慮內部影響,不完全傾斜 命令)...70 圖69 相對旋轉驅動約束示意圖 ...81 圖70 旋轉接頭示意圖 ...82 圖71 平移接頭示意圖 ...83 圖72 旋轉-旋轉接頭示意圖...84 圖73 旋轉-平移接頭示意圖...85 圖74 地面施加於IPM之力 ...93 圖75 輪胎v-axis之定義...94 圖76 地面力作用與運定學運動所造成之彈簧變形 ...94 圖77 完全傾斜命令,在不同波長之路面干擾下(A=0.02m),8.0m/s曲行測試之 傾斜動 作(1) ...98 圖78 完全傾斜命令,在不同波長之路面干擾下(A=0.02m),8.0m/s曲行測試之傾斜動 作(2) ...99 圖79 完全傾斜命令,在不同波長之路面干擾下(A=0.02m),8.0m/s曲行測試之傾斜動 作(3) ...100 圖80 完全傾斜命令,在不同波長之路面干擾下(A=0.02m),13.0m/s曲行測試之傾斜動 作(1) ...100 圖81 完全傾斜命令,在不同波長之路面干擾下(A=0.02m),13.0m/s曲行測試之傾斜動 作(2) ...101 圖82 完全傾斜命令,在不同波長之路面干擾下(A=0.02m),13.0m/s曲行測試之傾斜動 作(3) ...102 圖83 完全傾斜命令,在不同波長之路面干擾下(A=0.02m),13.0m/s曲行測試之傾斜動 作(4) ...103 圖84 完全傾斜命令,在不同振幅之路面干擾下(L=0.2m),8.0m/s曲行測試之傾斜動作 (1) ...104
圖85 完全傾斜命令,在不同振幅之路面干擾下(L=0.2m),8.0m/s曲行測試之傾斜動作 (2) ...105 圖86 完全傾斜命令,在不同振幅之路面干擾下(L=0.2m),8.0m/s曲行測試之傾斜動作 (3) ...106 圖87 完全傾斜命令,在不同振幅之路面干擾下(L=0.2m),13.0m/s曲行測試之傾斜動作 (1) ...106 圖88 完全傾斜命令,在不同振幅之路面干擾下(L=0.2m),13.0m/s曲行測試之傾斜動作 (2) ...107 圖89 完全傾斜命令,在不同振幅之路面干擾下(L=0.2m),13.0m/s曲行測試之傾斜動作 (3) ...108
第一章
序論
1.1 研究背景 能源節約與減少污染排放成為今日主要經濟與環境問題,在今日城市生活 中,如何製造高能源效率的車輛,是一個重要的議題,再者,在全球各大都市中 交通阻塞是日益成長的問題,若要公路建造能與車輛成長相同速率並不容易達 成,反言之,如何提高道路使用效率在解決此一問題扮演著重要的角色[1]-[3], 根據統計,在美國平均每輛車的搭載乘客數約為 1.58 人[4],這代表著車輛並未 完全發揮其功能,有過多的不必要重量運輸與能源消耗,單位乘客所造成的汙染 仍然相當高。 一門新興的研究與發展著眼於如何建立車輛最多串列搭載兩人(一前一後), 兩側輪輪距(wheel track)約一米寬的車輛,能使得能量消耗可以大幅減少,並加倍 單一道路的車容量(在今日的公路上,兩台車可在同一車道並列前進),且可以增 加停車容量(圖 1),然而這種車輛比今日人們使用最窄的汽車都還要窄,因此被 稱作可傾窄車(narrow tilting vehicles, NTVs),如何讓該車輛能夠在較廣的速度範圍下維持其過彎穩定性的重要工程問題必須解決,然而NTVs 必須夠高使得駕駛
者能夠有較佳的公路行駛視野,因此這樣高窄車具有較高的重心高度對輪距比, 對車輛行駛穩定性是一個重要的問題[5],因此若要使 NTVs 能夠在其操作速率 下,順利的過彎,它們需要具備有像一般兩輪車輛一樣的傾斜功能。
圖 1 NTV 之概念.
近五十年來,汽車業界中發展出很多 NTV 雛型車,1961 年,福特最早的
NTV,Gyron,它使用了一個 180 磅的陀螺儀來達成過彎穩定性,與具特別為停 車所設計的可收縮輪組,然而,它所使用的陀螺儀以今日的觀點來看太重了[6]: 1970 年代,General Motors 發展了一款三輪的可傾車輛,Lean Machine,此車具 有一不可傾的後引擎組連接置一個可傾的車體,加上一個由駕駛者操作的角踏板 來控制傾斜穩定驅動器[6];同樣在 1970 年代,BSA 基於 James Staley 和 William Hillman 的 Ariel tricycle 概念,發展了一種藉由駕駛者來控制傾斜動作之車輛 [7],Yamaha、Kawasaki 與 Honda 等車廠,也在接下來的十年間發展了相似的雛 型車[8]-[10]。
有許多NTV 概念車現在還在發展中,Mercedes-Benz F-300 Life-jet 利用油壓
驅動器來控制傾斜,詳細的內容具有保密性,但報告顯示F-300 據有相對寬的輪
距(也許是為了適應其高扭力的驅動器),這違背了 NTV 增加現今道路車容量的目 的;Carver Europe 目前仍持續改進的 Carver One 也是使用油壓系統驅動,根據其 網站(http://www.carver-worldwide.com)顯示,它的工程師們正試著在其速度與重 量間尋求最佳解;Toyota 的工藝作品 i-Swing 具有可兩種模態的切換功能:低速 下使用雙輪;高速下使用三輪;i-Swing 也具有人工智慧的功能,能夠學習不同 駕駛者的習慣,而其踏板控制的傾斜機構使得操作過彎如同再操作滑雪板一般,
然而它的過小容積、薄殼、低功率(最高速 20 km/h),並未考慮到日常生活的使用 方便性;另有一些公司也正在發展其NTV 雛型車,像是 Narrow Car Company 發 展其NARO,COVCO Ltd.發展其 Micro Max。有一些學術研究中心也對 NTV 貢 獻其心力,其中最有名的就是歐洲的Compact Low Emission VEhicle for uRban transport (CLEVER)計畫。
近十年來,為了控制 NTV 的傾斜動作,有一些傾斜控制策略被發展出來。
在[11]-[12]中,明尼蘇達大學設計了一款 NTV,具兩並行無動力前輪與一驅動後
輪,並使用一般 50c.c.小型機車之引擎,作為驅動動力來源,而傾斜動作由伺服
馬達完成,此文中分析了兩種傾斜控制策略:直接傾斜控制(Direct Tilting Control, DTC)與轉向傾斜控制(Steering Tilting Control, STC),DTC 是藉由量測的側向加速
度直接求出傾角與傾斜動作中所需要的扭力;而STC 則是將方向盤轉角訊號,將 方向盤訊號轉換為估計的轉彎路徑,藉由此一估計的路徑,計算出傾角與傾斜動 作中所需要的扭力。DTC 的優點在於計算方便,缺點在於側向加速度是被動訊 號,在轉向產生後才形成,可能會有傾斜過慢的問題;而STC 優點在於轉向訊號 直接控制傾斜動作,反應較快,而缺點在於對於不同的駕駛者其轉彎路徑之估計 會有誤差;其控制器將DTC 與 STC 整合,利用 STC 計算瞬態的傾斜動作,DTC
控制穩態的傾斜動作,結合為一稱為Receding Horizon Controller (RHC)之控制器。 在[13]中,為 CLEVER(Compact Low Emission VEhicle for URban)之設計,為
具一無動力前輪與二驅動後輪之NTV,利用油壓驅動傾斜機構,而其傾斜動作控 制,為利用Ackermann 原理計算出一開迴路之傾角控制,再利用側向加速度對傾 角做迴饋控制,並用一偏航率(yaw rate)感應器作傾角的修正,此一控制方法基本 上也是融入STC 與 DTC 的概念,其優勢為油壓驅動器之大功率輸出,使得傾斜 動作得以快速完成,並且多感應器使得傾角較為精確,然而,其使用過多感應器, 有成本考量之問題,並且油壓設計使得車體重量難以減輕。 在[14]中,為 Carver One 之傾斜動作控制,其機構之設計與控制原則基本上 與CLEVER 相同,但較為不同的是在於 Carver One,在開迴路控制時,利用駕駛
者轉動方向盤的瞬間,讓前輪轉動與方向盤轉向相反之小角度,進而產生一與轉 彎方向同向之離心力,提供為車輛傾斜之用,在車輛傾斜後,再快速將前輪轉回 為與方向盤同向,順利進入轉彎方向,而其調適在高速時,前輪轉角較為小,車 身傾角較大,在低速時,前輪轉角較為大,車身傾角較小。 這些已發展的傾斜動作控制器,都專注在如何使車身轉彎穩定性,也有一定 的成效,然而,並無考慮到在不同的路面狀況或不完全傾斜命令(完全傾斜命令可 使得駕駛位置所受到重力回覆力矩與向心力翻覆力矩接近平衡)下,所造成的負載 干擾對於傾斜控制器功能運作的影響。
本論文中,一款菱形四輪可傾窄車被製作出,名為IPM (Intelligent Personal Mobility) ,具有傾斜功能可增加車輛過彎穩定性,並可以進行定點迴轉。為了分 析一些冒險的駕駛狀況,本論文中利用多體系統方法對IPM 車輛進行建模,此一 此模型可求得系統中接頭反作用力以輔助控制器設計,並可延伸運用到其他機械 系統,此一模型在本論文中被經由與實車曲行測試比較驗證,證實其準確性。 本論文的研究中,結合STC 與 DTC 的傾斜動作命令已可使得車輛得以穩定 地過彎,然而如何使傾斜動作控制器能夠穩健的實現此一命令是重要的問題,本 論文將對 IPM NTV 之傾斜動作適當簡化與線性化以利控制器之設計,並利用 QFT/H∞方法,設計一強健控制器以實現傾斜動作對於外界干擾的抵抗力,此一控 制器為了其可實現性,被以系統化的方式轉換為可精準控制傾角位置的雙迴路 PID 控制器,由於其具有強健性,所稱之為強健雙迴路 PID 傾斜動作控制器,此 雙PID 控制器為一個傾斜速度 PID 控制迴路,與一個包覆此速率迴路之傾斜位置 PID 控制迴路,此一雙迴路 PID 控制器對於路面干擾與不完全傾斜命令的狀況下 之穩定性,在本論文藉由已驗證之IPM 多體系統模型所驗證。 1.2 多體學系統(Multibody System)
模,而其中可能有旋轉或著平移運動如圖2 所示,相連物體間的動態行為被系統 化地推導為許多力學領域上的公式,而最簡單的多體系統物體或元件已經被 Newton (自由粒子)與 Euler(剛體)所處理,而 Eular 已經推導出物體間的作用力; 此後一序列的公式被推導出,其中最重要的就是Lagrange 所推導出的 Lagrange’s formalisms,其最小化系統座標數與推導出引入系統約束的第二公式(a second formulation that introduces constraints)。
基本上,物體間的運動被其運動學特性所描述,然而其動力學結果由其施力 與動量變化間的平衡所決定,今日多體系統已關係到許多工程領域的研究,尤其 是機械人學與車輛動態,多體系統的一個重要功能,在於多體系統公式通常提供 代數與電腦輔助的方法以利建模、分析、模擬與最佳化任意可能具有上千物體相 連之系統(也許有時被稱為計算多體系統方法,computational multibody system
approach)。
1.3 定量反饋理論(Quantitative Feedback Theory , QFT)
定量反饋理論其目前使用之形式是Horowitz 和 Sidi 在 1972 年所提出,此設 計方法是針對具有參數變動的受控體,將給定的時域響應規格轉換到頻域規格, 然後在頻域裡利用波德圖(Bode plot)、奈奎斯特圖(Nyquist plot)或尼可士圖 (Nichols Chart)設計迴路增益落在適當的位置上來設計控制器,使得系統輸出響應 能夠符合規格要求。並且,QFT 的設計方法,引入具有二自由度控制器架構設計 的概念,一自由度來自於對控制器頻域設計的本身,另一自由度來自由在控制器 設計後,於命令輸入端再加入一前置濾波器以動態的補償系統性能[17]-[20],如 圖3 所示,Cs為設計的控制器,Fil 為前置濾波器,Ps為系統plant,d1與d2為不 確定之干擾,r 為命令,r1為通過前置濾波器後之命令,y 為輸出。 +
−
r
r
1 1d
2d
y
圖 3 具有系統不確定性之二自由度 QFT 迴饋控制系統 1.4 H∞控制理論 H∞控制理論自 20 世紀 80 年代發展至今,取得豐碩的成果。H∞控制理論是 分析與設計不確定系統的一種強有力的工具,主要解決對象為建模中的誤差和在 一定範圍內因模型不確定性而引起控制品質惡化的控制難題[53]。H∞最優化設計 方法已成為反饋系統中一種有效的方法,其有效性之一,體現在外部擾動不再假 設為固定的,只要要求能量有界既可;其有效性之二,體現在受控對象不再假設為確定的,許多控制問題均可轉化為H∞最優控制問題,從而進一步顯示了H∞優 化設計方法的適用性,它成為一種線性多變量控制系統的新設計方法,其發展之 迅速是令人矚目的,有人甚至將他比喻為控制理論的一場寧靜的革命。雖然這些 程序與欲求得性能被經由在頻域求得,但 H∞設計方法技巧,基本上使用狀態函 數求解迴饋最佳化問題。標準的H∞控制器設計,如圖4 所示,yh為控制器的量測 值,u 為控制器的輸出,w 表示外界干擾,z 代表誤差信號,Ps為系統轉移函數矩 陣(Plant),包含了受控體與描述期望特性所加入的權重函數[21],CH 為根據 H∞ 最佳控制設計之控制器,使得從w 到 z 的閉迴路轉移函數 Twz的H∞範數達到最小, 其中Twz的H∞範數定義,如式(1.1),為系統正弦響應其增益值的最小上限。
( )
{
( )
0wz
: sup
wz wT
s
σ
−T
j
ω
∞=
≤ ≤∞}
(1.1)w
z
u
y
h 圖 4 標準 H∞控制器之系統架構第二章
車體架構與建模
2.1 IPM雛型車設計與製造 IPM NTV,菱形四輪雛型可傾窄車,具有一轉向前輪(且具驅動力)、兩側輪 與一腳輪式(castor)後輪,此四輪皆具有震盪吸收器,IPM 之重量約為 201kg。其 幾何尺寸如圖 5 所示(本論文中所有單位皆 MKS 制),IPM 目前之設計極速為 53km/h,而具有一旋轉阻尼器安裝於腳輪機構中,使得腳輪式尾輪只被允許在低 速下轉動,防止其在高速行進之擺振(shimmy)。其目前設計使得 IPM 可以進行定 點迴轉(on-spot cornering,圖 6),此一功能使得在都會街道行駛與停車變得容易, 而其平行四連桿之懸吊設計可以克服雙側輪在路面上之不規則外傾 (camber irregularities),所造成的不穩定。如圖 7 與 8 所示,IPM 具有整車可對一旋轉中 心旋轉之功能(符號請見附錄一),而為了駕駛者之安全,系統中整合一傾斜極限 器。IPM 前輪動力來自於一市售電動車之輪轂馬達(in-wheel motor)。部分車體與 底盤的零件是由特別設計或製造出,包括車架(用以組裝轉向系統、後懸吊與底 盤)。其原創之底盤,用來組裝傾斜機構、電池、震盪吸收器、兩側輪、後輪輪架
與其他車體部件。前叉、震盪吸收器與車輪都來自於市售汽機車與手推車,圖 9
1 m
0.6 m
2 m
圖 5 IPM 幾何尺寸
圖 7 簡易 IPM 翻轉模型
l
ma
圖 9 組裝之 IPM
2.2 抗翻覆能力
當IPM 傾斜時,一六連桿機制提供向心力與增加抗翻覆能力(圖 7),翻覆的
結果起因於許多在車輛上複雜的作用力之交互作用,這些作用力受到車輛行進與 道路特性的影響,在此一議題上有許多已完成的研究,我們的研究使用準靜態翻 覆分析方法(quasi-static rollover analysis[5],忽略旋轉平面上轉動慣量與加速度), 分析IPM 之抗翻能力。 在左轉過程中,由於底盤的角度變化很小,所以可以簡化車輛在翻滾平面上 的模型為圖8 顯示,假設路面斜率為零,因為當車輛滑動時所受到的翻滾力矩小 於車輛未滑動時所受到的翻滾力矩,因此在車輛轉彎的瞬間,我們假設(a)車輪緊 貼在車輛轉彎的路徑上(這代表地面摩擦力成為轉彎時所需要的向心力),(b)並且 向心力成為作用於質量中心的離心力,此一效應可以幫助我們量測翻覆臨界值
(rollover threshold)[5],當翻覆發生的瞬間,左輪離開地面而沒有任何正向力作用 在其上,此時我們可得到翻覆臨界值,附錄一中,式(A.11)顯示出全車傾斜時, 翻覆臨界值大於其他典型的不可傾窄車,根據我們的實驗數據顯示IPM NTV 之 抗翻覆能力與今日主流市售車輛相同。 為了分析對駕駛者而言相當冒險的行駛狀況,本論文中對IPM 進行建模,因 為IPM NTV 具備有菱型四輪排列與傾斜功能,所以其建模過程較其他標準三輪 與四輪車輛複雜,而大多數的車輛建模方式只需考慮到其自由度的問題,但IPM 車輛需要接頭反作用力資料來達成控制與設計目的,使得它必須被利用多體系統 建模方式來進行系統分析,本文中IPM 多體系統建模,先分辨系統的必要動部與 不動部,選擇方式依據其對系統動態之影響,而多體系統也需要接頭來限制車體 各部間之相對運動,其系統方程需要轉動慣量、質量、質心初始位置、物體之主 慣性軸(principle axes)、接頭種類與接頭連接位置等,當這些資料被收集完成後, 系統之微分代數方程(differential-algebraic equations,DAEs)可以被建立與求解 [15]。 2.3 多體翻轉模型 圖10 所示為具有 18 接頭之 IPM 三維多體系統模型,大括號中的數字代表其 物體之代號(見附錄二),為了有效分析的目的,以及為了得到所要分析的傾斜與 翻轉特性,且在沒有煞車力的作用下,俯仰運動對翻轉運動的影響可以忽略,IPM 翻轉平面多體模型被建立如圖 11 所示,詳細請見附錄二,而為了推導多體系統 輪胎力模型,座標系統被定義如圖12 所示(附錄三),為了便於計算,系統的各向 量被表示為矩陣形式[15]。
圖10 三維 IPM 多體模型
i
r
iξ
iη
s '
i, p iΨ
body i
圖12 點 Pi之卡氏座標(Cartesian coordinates) 2.4 輪胎力模型 IPM之圓形輪胎(cycle tire)截面如圖13所示,P點代表輪胎截面之中點,而C 點代表輪胎與地面之接觸點,圓形輪胎之建模假設C點永遠為P點在地上之投影點,圖14中說明作用在輪框之力,輪框(Wheel rim)與輪胎之體編號(body index)為
j,點Oj (ξjηj座標原點)固定在輪胎與輪框之質心;點Pj和Cj在此圖中為類似於圖13 中之點P與C。Fj,x和Fj,y分別為作用在Body j質心之x方向力與y方向力,Nj作用 body j之力矩;而Fcj,x為地面作用在輪胎之x方向力。圖15為計算輪胎作用在輪框 之力與力矩的流程圖,而此輪胎力模型如何被推導為適用於多體系統之過程,請 見附錄四與式(D.1)-(D.7)。
圖13 輪胎模型之截面視圖 j
P
jξ
jη
j,ps
j,c
s
jC
jO
Wheel rim
body j
圖14 作用在輪框之輪胎力模型圖15 計算作用在輪框之輪胎力的流程圖 2.5 模型之運動方程(Equations of Motion) 如式(2.1)所示,qi為body i之位置與方向(orientation),而如式(2.2),對一個具 有n個物體的多體系統,向量q代表q1, q2, q3 … qn的組合,根據約束系統(constraint system)之動力學與運動學,系統方程可以被利用Lagrange乘子(Lagrange multiplier) 而推導出[15]。藉由結合動力學方程與運動學約束方程為矩陣模式,使得其運動 方程式(Equations of motion)可以被表示為DAEs的形式如式(2.3)所示,其中Im為質
量矩陣(mass matrix),Φ為運動學約束方程,而Φq為相對應之Jacobian matrix (將Φ
對q作偏微分), λ為Lagrange乘子向量(Lagrange multiplier),Q為施加在系統各個
物體上之外力(在本系統中,包括施加於質心的重力,以及彈簧力、懸吊力、輪胎 力與相對應的力矩等),γ為運動學加速度方程之右項(the right side of kinematic
得,令nc代表系統約束數,則λ為nc×1之向量,λk代表λ中第k個元素(element),λkm
定義為與λ相同維度(dimension)的向量,將λkm的第k個元素(element)用λk取代如式 (2.4)所示,則在式(2.5)中,Rk(與q具有相同維度之行向量)代表經系統第k個約束
作用在系統每一物體之約束反作用力(constraint reaction forces),計算接頭(joint) 約束反作用力對於控制器設計與機械系統設計相當有用。
[ , , ]
T i=
x y Ψ
i i iq
(2.1) T (2.2) (2.3) (2.4) m (2.5)[
T T....
T]
=
1 2 nq
q
q
q
0
T⎡
⎤ ⎡ ⎤ ⎡ ⎤
=
⎢
⎥ ⎢ ⎥ ⎢ ⎥
⎢
⎥ ⎣ ⎦ ⎣ ⎦
⎣
⎦
m q qI
Φ
q
Q
Φ
λ
γ
[0 ... 0
0 ... 0]
T kλ
=
kmλ
T=
k q kR
Φ λ
第三章
模型驗證
3.1 計算地面力(Ground Forces) 為了實驗地驗證IPM多體模型,本論文中提出一計算來自地面之力量的方 法。質心(M)對應於J1的位置被用來求得這些力量與M的近似距離。我們的傾斜機 構被簡化為一六連桿機構,如圖16所示,當車輛傾斜時,M的近似位置如圖17所 示,而求得此一近似位置之流程圖如圖18所示,圖16-18與式(3.1)-(3.8)之符號被 註明於附錄五。因為此一六連桿機構只有一個自由度,所以只需要知道一個系統 變數既可求得系統的運動學運動(kinematic motion),在本文之推導中,選擇θd作 為獨立變數,如式(3.1)-(3.4),其他全部的變數皆為θd之函數,在此簡化機構中, Mb對應於J1的位置近似為θb的函數, Mc對應於J1的位置近似為φ函數,據此,利 用式(3.5)和(3.6)可以得到M對應於J1的位置,且θm可以利用式(3.7)算出,而如式 (3.8)所示,lmo可以藉由計算Lcj,x和Lcj,y的平方和之平方根求出,本論文中,式 (3.1)-(3.8)對於求出地面反作用力是必須的。 1( ) b f dθ
=θ
(3.1) 2( )
df
ϕ
=
θ
(3.2) 3( )
slf
dθ
=
θ
(3.3) 4( )
srf
dθ
=
θ
(3.4) , [ sin( ) sin( )]/ cJ x b b b c ch L = −M lθ
+M lϕ
m (3.5)m
,[
cos( )
cos( )] /
cJ y b b b c chL
=
M l
θ
+
M l
ϕ
(3.6) d 1 , , 5 tan ( / ) ( ) m Lc x Lc y fθ
= − − =θ
(3.7)2 2 , , 6( ) mo cJ x cJ y d l = L +L = f
θ
(3.8) bθ
srθ
slθ
ϕ
θ
dJ
1x
y
圖16 IPM 運動學運動 bθ
bM
ϕ
mθ
M
cM
圖17 質心在運動學運動後之近似位置圖 18 計算 IPM 質心近似位置之流程圖
計算來自地面之力的流程圖如圖19所示,當質心加速度與θm已知時,這些力
可以求得(如附錄六),換句話說,當θd與質心三軸加速度給定時,利用結合式
(3.1)-(3.8)與(F.1)-(F.19)可以算出來自地面所有的力,這些力可以被用來當作IPM 翻轉平面多體模型之輸入,此時力Fxc為力Fxf和Fxr之和。
圖19 計算地面力之流程圖 3.2 曲行測試(Slalom Test) 為了對系統在傾斜動作時的動態能夠作更完整的分析,因此規劃一具有固定 半徑之曲行測試實驗來收集數據,如圖 20 所示,其為圓之片段所組成,其中 R 為半徑,d 為其寬度,令下方圓之圓心 H1為原點來設計曲線,H2為中間圓的圓 心,位置為(a,b);C1為由H1與H2畫出的兩個半徑為R 之圓的相切點,其位置為
(x,y),因此若 R 與 d 已知,(a,b)可藉由求解式(3.9)之聯立方程而求得,如式(3.10) 與(3.11)所示,整個曲行測試之曲線,可以經由衍伸後求出,在我們的實際路測中, R = 25m 而 d = 4m,實際路測狀況如圖 21(不具傾斜動作)與圖 22(具傾斜動作)所 示。 2 2 2 2 2 2
2
-- 2 -- 2
- / 2
/ 2
R a d
x
y
R
a
b
y
ax b
x
y
2R
2x R d
y b
=
⎧
⎪
+
=
⎪⎪
+
+
+
=
⎨
⎪
=
⎪
=
⎪⎩
(3.9)2
-a
=
R
d
(3.10) 24
b
=
R
−
a
2 (3.11) 2( , )
H
=
a b
( , )
x y
R 2 d 2 d 1(0,0)
H
=
圖20 規劃之曲行測試圖21 不具傾斜動作之曲行測試 圖22 具傾斜動作之曲行測試 3.3 結果 表1顯示靜平衡狀態下,模型與實車之質心位置,其結果顯示模型之質心位 置與實車相近。 表1 模型與實車之質心位置(靜平衡) 實車 模型 質心位置 [x, y] (m) [0, 0.54] [0, 0.5488]
為了動態分析,將IPM NTV 進行實車曲行測試,速度為 4.7m/s、5.5m/s、6.9
與8.0m/s,由於傾斜動作控制器仍然在發展中,所以此處之傾斜動作由駕駛者完
成,除了驗證模型的目標外,也可幫助收集駕駛者傾斜動作行為,以利控制策略 發展,我們在車輛上安裝了兩個慣量感測器(inertia sensor, Microstrain 3DM-GX1) 與一個自行設計的角度感測器(利用 potential meter 設計出),用以量測所需的訊 號,慣量感測器分別裝在 mb1的質心與除 mb1外其他部位的質心(圖 11),實驗過 程中,量測上述兩個質心的加速度,以及量測 mb1和 mb2的翻滾角,並利用角度 感測器量測θd來模擬駕駛者之傾斜動作。 IPM 質心(M)加速度藉由上述兩個質心(mb1的質心與除mb1外其他部位的質心) 的加速度計算而得,並與θd藉由式(3.1)-(3.8)與(F.1)-(F.19)算出地面力,輸入模型 中,進行模擬,加速度與 θd訊號經過二階 3Hz 低通濾波器濾除不利模型分析之 車體振動。模型所有的參數請見表 4(附錄二)與表 5-9(附錄七),各個體之體固定
坐 標(body fixed coordinates) 對 整 體 座 標 (global coordinates) 之 初 始 方 向 角 (orientation angle)被定為零,圖 23-26 為實車與模型模擬之比較:圖 23 顯示在模 型與IPM 在曲行測試中不具傾斜動作下,mb1的翻滾角;圖24 顯示在模型與 IPM 在曲行測試中具傾斜動作下,mb1的翻滾角;圖25 顯示在模型與 IPM 在曲行測試 中不具傾斜動作下,mb2的翻滾角;圖26 顯示在模型與 IPM 在曲行測試中具傾斜 動作下,mb2的翻滾角。 由這些結果顯示,本文中提出之模型模擬結果與實車測試非常接近,而其差 異主要來自(a)模型中之接頭摩擦力被忽略,(b)路面的部分高度不平整處違背了式 (F.5)-(F.19)建算之輸入力量的假設,且或(c)感測器訊號的不準確,而據此結果, 證實了此一模型與實車之翻轉平面運動相當接近,我們因此建議可利用此一模型 模擬一些危險的駕駛狀況。
non-tilting, 4.7 m/s non-tilting, 4.7 m/s non-tilting, 5.5 m/s non-tilting, 5.5 m/s
non-tilting, 6.9 m/s
non-tilting, 6.9 m/s
non-tilting, 8.0 m/s non-tilting, 8.0 m/s 圖23 實車與模型不具傾斜動作之 mb1翻滾角(roll angle)tilting, 4.7 m/s
tilting, 4.7 m/s
tilting, 5.5 m/s
tilting, 5.5 m/s
tilting, 6.9 m/s
tilting, 6.9 m/s
tilting, 8.0 m/s
tilting, 8.0 m/s
圖24 實車與模型具傾斜動作之 mb1翻滾角(roll angle)圖25 實車與模型不具傾斜動作之 mb2翻滾角(roll angle)
non-tilting, 4.7 m/s
non-tilting, 4.7 m/s
non-tilting, 5.5 m/s
non-tilting, 5.5 m/s
non-tilting, 6.9 m/s
non-tilting, 6.9 m/s
non-tilting, 8.0 m/s
non-tilting, 8.0 m/s
tilting, 4.7 m/s
tilting, 4.7 m/s
tilting, 5.5 m/s
tilting, 5.5 m/s
tilting, 6.9 m/s
tilting, 6.9 m/s
tilting, 8.0 m/s
tilting, 8.0 m/s
圖26 實車與模型具傾斜動作之 mb2翻滾角(roll angle)3.4 模型應用 3.4.1 控制器設計 圖27(不具傾斜動作)與圖28(具傾斜動作),為模擬前述曲行測試在車速為 8.0m/s時,模型的mb2加速度與約束Jr,d作用在mb1之力矩,此結果指出當模型在具 傾斜動作下,此扭力較小並且較穩定,換句話說,此結果顯示當車輛實行傾斜動 作時,車體遭受較小的扭力,此一結果與Kidane等人所得的結果相同[1],其計畫 設計為了駕駛的舒適性一傾斜動作控制器使得上述扭力最小化。
non-tilting, 8.0 m/s
non-tilting, 8.0 m/s
圖27 模型不具傾斜動作時,約束 Jr,d作用在mb1之扭力tilting, 8.0 m/s
tilting, 8.0 m/s
圖28 模型具傾斜動作時,約束 Jr,d作用在mb1之扭力 3.4.2 機械系統設計 圖29(不具傾斜動作)與圖30(具傾斜動作),為模擬前述曲行測試在車速為 8.0m/s時,模型的mb2加速度與接頭J2作用在mb1之反作用力,其中“x-dir force”和 “y-dir force”代表x方向與y方向反作用力,藉由比較這兩圖,可以知道模型在具傾 斜動作時,上述反作用力較為穩定,而其他所有接頭在傾斜與不傾斜狀況之反作 用力也可求得,據此我們相信我們的NTV模型對於車輛設計時,接頭強度的分析 相當有用,並可將其衍伸至其他機械系統。non-tilting, 8.0 m/s non-tilting, 8.0 m/s 圖29 模型不具傾斜動作時,接頭 J2作用在mb1的反作用力 tilting, 8.0 m/s tilting, 8.0 m/s 圖30 模型具傾斜動作時,接頭 J2作用在mb1的反作用力
第四章
傾斜運動控制器設計
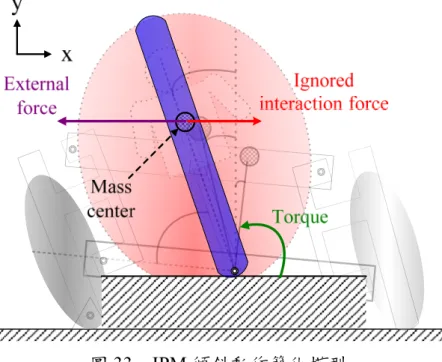
4.1 傾斜運動之簡化與線性化 為了控制器設計過程能夠更有效率,必須適當的簡化車輛動態模型,圖 31 為簡化傾斜機構示意圖,Mb為系統非底盤部(可傾部)之質心,θb為非底盤部對鉛 直方向之夾角, Mc為底盤之質心 φ 為底盤之翻轉角(roll angle),IPM 車輛過彎 過程如圖32 中所示,而 IPM 就是利用其傾斜機構實現在其過彎時,達成向心力 翻覆力矩(黃色點虛線箭頭)與重力抗翻覆力矩(綠色虛線箭頭)平衡,增加車輛過彎 之穩定性[2]。由圖 31 中可以看出,IPM 的傾斜動態之高度非線性,因此,我們 將 IPM 之傾斜系統作簡化,由於 IPM 機構設計,其底盤之傾角,在正確的傾斜 命令(維持過彎穩定性)執行下,相當的小,所以就傾斜動作而言,可將其視為一 固定底座,而可傾部則視為一倒單擺,如圖 33 中所示,車輛機構連動對於可傾 部動態之影響,來自於其對可傾部之施力,因此以被忽略交互作用力(ignored interaction force)代表(由於 H∞控制器可以對於外力之不確定性與系統建模之不確 定性,做適當之調適,所以此一簡化對之控制器設計影響不大),而車輛在轉彎過 程中所遭受到的地面力,可當成施加於單擺質心之外力,將交互作用力與外力整 合為未知外力(external force),F,因此可以推導出式(4.1),τ 代表施加在單擺上的 扭力,然而,可以看出在經過這樣的簡化後,系統之非線性度依舊相當高,所以 進一步將傾斜機構的動作分成相當多的片段,如圖 34 所示,對於每一個片段, 每一個傾斜動作可視為一個此刻單擺所在片段之中心位置(θ )加上一微量動作φb 如式(4.2),然後可得式(4.3),根據式(4.4)和(4.5)我們可以導出式(4.6),可以看出 傾斜動作對於每一片段中心而言可視為一線性動態方程,求其系統 Laplace 轉換 函數得式(4.9),將式(4.9)右項視為系統輸入 τall (基於輸入不確定性的補償能力), 如式(4.10),非底盤部質量 mb約為196kg(含駕駛者),重力加速度為 g,單擺長度l 為 0.442m,單擺轉動慣量 I 為 31.02 kg·m2,在我們的設計考量下,各變數的變 化範圍如表2 所示,對其求系統動態方程式,可得式(4.11),其中 C△即為系統建 模與外力之不確定量,得到此一簡化之系統傾斜動作動態方程,此式也顯示出此 系統若無控制會發散,我們將進一步利用QFT/H∞設計傾斜動作控制器。 2 (m lb +I)
θ
iib−m glb sin( )θ
b −Flcos( )θ
b =τ
(4.1) b bθ
=θ
+φ
(4.2) 2 (m lb +I)θ
b−m glb sin(θ
b+ −φ
) Flcos(θ
b+φ
)= iiτ
(4.3)cos(
) cos
cos
sin
sin
cos
sin
b b b b bθ
φ
θ
φ
θ
θ
φ
θ
+
=
−
=
−
φ
(4.4)sin(
) sin
cos
cos
sin
sin
cos
b b b b bθ
φ
θ
φ
θ
θ
φ
θ
+
=
+
=
+
φ
(4.5) Andθ
b=
φ
ii ii 2(
m l
b+
I
)
φ
−
m gl
bsin
θ
b−
φ
m gl
bcos
θ
b−
Fl
cos
θ
b+
φ
Fl
sin
θ
b=
ii
τ
b
(4.6)
2
(
m l
b+
I
)
φ φ
−
m gl
bcos
θ
b+
φ
Fl
sin
θ
b= +
τ
m gl
bsin
θ
b+
Fl
cos
ii
θ
(4.7) 2 2 { } ( ) ( )[ ( ) (0) (0)] ( cos sin ) ( ) sin cos b b b b b b b L s m l I s s s m gl Fl s m gl Flφ
φ
φ
θ
θ
τ
θ
θ
= Φ + Φ − − + − + Φ = + + (4.8) 2 2 2 ( ) ( cos sin ) ( ) /( ) (0) (0) ( sin cos ) /( ) b b b b b b b b s s m gl Fl s m l I s m gl Fl m l Iθ
θ
φ
φ
τ
θ
θ
Φ + − + Φ + = + + + + + (4.9) 2( (0)
(0))(
) (
sin
bcos
b)
alls
m l
bI
m gl
bFl
τ
=
φ
+
φ
+ + +
τ
θ
+
θ
(4.10) 20.01442
( )
,
5.1 ~ 16.13
C
alls
C
s
Δτ
ΔΦ
=
≅ −
−
+
(4.11)b
M
ϕ
cM
bθ
圖31 簡化之傾斜機構 圖32 IPM 過彎示意圖圖33 IPM 傾斜動作簡化模型
b
θ
φ
表2 傾斜動作動態方程中,各變數的變化範圍 變數 值範圍 b θ -30,-20,-10, 0, 10, 20, 30 (deg) (0)
φ
-5~5 (deg)(0)
φ
-180~180 (deg/sec) F -0.9mbg~0.9mbg (N) 4.2 使用結合QFT/ H∞理論之控制器設計 傳統QFT 設計方法是在尼可士圖(Nichols Chart)做迴路調整來求得控制器, 此作圖法對於設計者在設計時,因為種種限制而造成設計的不便。因此,為了避 免不便,結合 QFT/H∞的設計方法將不再採用尼可士圖求解控制器,而是直接利 用H∞最佳控制的方法計算出控制器CH,然後再加上前置濾波器Fil,使系統的輸 出響應能夠符合性能要求,注意本論文中之控制器利用直接施加扭力控制 Plant (IPM 傾斜動作)。 重新考慮圖3,具有受控體不確定性的二維自由度反饋系統,根據 IPM 傾斜 動作,將其轉化為如圖35 所示,設計流程如圖 36 所示,步驟如下: 1. 利用 QFT 方法將系統的時域規格要求,轉換為在頻域規格的上下邊界(upper and lower bounds),此處定義允許區間(permitted range)為在頻域上介於規格上 下邊界的區間。2. 設計傾斜速度控制器 CH,先不考慮前置濾波器Fil,根據規格要求適當地選擇
權重函數,再利用H∞理論求解控制器CH。
3. 求出 CH後,設計包覆速度迴路的傾斜位置控制器,CP,並確認系統響應由其
頻率趨勢上可落入上下界範圍內,但還實際動態特性還是在該範圍外,則再加 上前置濾波器Fil 做適當修正系統的性能),使其落在上下邊界範圍內。 +
−
r
r
1 1d
2d
y
+−
圖35 全系統之控制器設計 圖36 QFT/H∞控制器設計流程圖4.2.1 時域規格 根據我們的設計(考量穩定與舒適),需要的控制系統時域規格如下所示: 安定時間(Settling time) ts: 0.2 s s t ≤ ec (4.12) 最大超越量(Maximum overshoot) Mp: 10% p M ≤ (4.13) 4.2.2 定義上下邊界 一個標準的二階系統之轉換函數如式(4.14)所示,ξ 為阻尼比(damping ration), ωn 為系統自然頻率(natural frequency),在 QFT 理論中,上邊界函數為低阻尼 (underdamped)系統,下邊界函數為過阻尼(overdamped)系統[17],因此根據時域規 格以及上下邊界函數的阻尼特性,我們可以量化上下邊界之頻域規格,上邊界函 數如式(4.15)所示,ξ 和 ωn必須符合式(4.16)和(4.17),並且對於低阻尼系統 ξ 必 須小於1,下邊界函數如式(4.18)所示,ξ 和 ωn必須符合式(4.16)和(4.17),並且對 於低阻尼系統ξ 必須大於 1,根據我們的設計考量下,選擇下邊界函數之 ξ 為 1.1, 進一步,根據式(4.12)與(4.13)的時域規格,我們得到上邊界函數 BU與下邊界函數 BL分別如式(4.19)和(4.20)所示,而為了放寬系統在高頻時設計限制,在不影響系 統時域規格性能的情形之下,加入兩個極點(s + 100)到下邊界函數中,得到一新 的下邊界函數 BL2如式(4.21)所示。根據(4.19)與(4.21),可以在波德圖(Bode plot) 上得到上下邊界。
( )
( )
( )
2 2 22
n n nY s
T s
R s
s
s
ω
ξω
ω
=
=
+
+
(4.14)( )
22
22 n U n nB s
s
s
ω
2ξω
ω
=
+
+
(4.15) 2 exp 1 p M ξπ ξ ⎛ − ⎞ ⎜ = ⎜ − ⎝ ⎠ ⎟ ⎟ (4.16)4.6
s nt
ξω
≈
(4.17)( )
22
22 n L n nB s
s
s
ω
2ξω
ω
=
+
+
(4.18)( )
21514
46 1514
UB s
s
s
=
+
+
(4.19)( )
2
4.372
46 4.372
LB s
s
s
=
+
+
(4.20)( )
2 4 3 2437.2
0.0001
0.0246
1.964
54.74 437.2
LB
s
s
s
s
s
=
+
+
+
+
(4.21) 4.2.3 H∞傾斜速度控制器 為了精準地控制傾斜動作,必須先求得傾斜速度控制器,再對傾斜位置作迴 饋控制器,為了設計IPM 傾斜速度控制器使其能夠具有較高的對抗干擾能力,將 問題視為考慮靈敏度與干擾的H∞最佳化問題[17],因此,一個把系統靈敏度與抗 干擾能力利用權重函數(weighting function)加以詮釋的方法被考慮,其系統架構如 圖37,由 w 到 z1、z2和z3分別為Wf1S、Wf2R 和 Wf3T。S 為靈敏度函數(sensitivity functions),Wf1 為關係於 S 之權重函數,R 為控制靈敏度函數(control sensitivity function),Wf2 為關係於 R 之權重函數,T 為互補靈敏度函數(complementary sensitivity function),Wf3為關係於 T 之權重函數,而一目標函數 Dw被定義如式是閉迴路系統對於干擾抑制能力的度量,||R||∞是對模型參數加性不確定性
(additive uncertainty) 的 度 量 , ||T||∞是 對 模 型 參 數 乘 性 不 確 定 性(multiplicative
uncertainty)的度量。而由於 H∞最佳化問題,為一充分發展的課題,在此只需選定 權重函數,再利用軟體Matlab,即可計算出所要的控制器,而對於權重函數如何 選定則可參考[17]-[19]與[21],根據設計需求和已知的扭力至傾角位置轉移函數, 如式(4.11),將其不確定量 C△取平均值,即為Ps,對其作微分即為Psd,選定Wf1、 Wf2與Wf3如式(4.23)、(4.24)與(4.25),而根據系統特性我們忽略 Wf2的影響,因而 得到傾斜動作速度控制器,如式(4.26),基於設計單純化的考量,我們接著將使 用一簡單的比例(proportional)迴饋控制的方式控制傾斜位置,並將傾斜位置控制 器與傾斜速度控制器串聯,所設計之QFT/H∞全系統架構如圖38 所示。比例控制 器的比例增益(proportional gain),KP,我們將根據 QFT 方法選定,使其能落入 QFT 方法所界定的上下邊界規格限制範圍內(允許區間)。 1 2 3 f f f W S W R W T ⎡ ⎤ ⎢ ⎥ = ⎢ ⎢ ⎥ ⎣ ⎦ w D ⎥ (4.22)
(
)
(
)
2 1 2200
16
15.1
fs
W
s
+
=
+
(4.23) (4.24) 20
fW
=
2 335
35
10000
fs
s
W
=
+
+
(4.25)( )
4(
33 2 2)
1081576.9062 60.06 373.8 609.19 216.4 5864.3 42657.8 H s s s C s s s s s + + + = + + + (4.26)C
HP
sd+
W
f1W
f2W
f3r
y
w
+
−
1z
z
2z
3 圖37 混合靈敏度之 H∞ 最佳化問題 +−
r
r
1 1d
2d
y
+−
圖38 IPM 傾斜動作之 QFT/H∞控制系統 4.2.4 確認控制器規格 根據 6.2 與 6.3 節,我們有了系統在頻域規格的上下邊界與系統之速度控制 器,接著我們將確認系統是否能落入所要求之規格邊界內(允許區間),並確定所 需要之傾斜位置控制器之 KP值。當我們設定 KP值為 12,再根據推導出的 plant 之轉換函數,我們將整體閉迴路系統與上下邊界函數,作波德圖,如圖39 所示, 圖39 中的頻率範圍為 10-2至104 rad/s,是因為考量到傾斜運動頻率 0~1.5Hz,路 面干擾頻率0~100Hz,其中藍色線為上邊界函數之頻域響應,綠色線為下邊界函 數之頻域響應,紅色線為整體閉迴路系統之頻域響應,圖中顯示系統可完全落入 規格邊界中,因此確定,此一控制器可以符合所制定之規格;再對整體閉迴路系 統做步階響應(Step Response),如圖 40 所示,其時域響應也符合規格需求,落入 上下邊界函數之間。Upper Lower QFT/H∞ 圖39 上下邊界函數與 QFT/ H∞控制系統之頻率響應 Upper Lower QFT/H∞ 圖40 上下邊界函數與 QFT/ H∞控制系統之步階響應(Step Response)
4.3 強健雙迴路PID控制器設計
為了工業上設計的實現性,我們希望將控制器設計為PID 型控制器,PID 控
制器已廣泛為工業界所應用,這證實了其實現性,其輸出對輸入之轉換函數如式 (4.27)所示,其中 KP為比例增益(proportional gain),KI為積分增益(integral gain), KD為微分增益(derivative gain),而控制器架構是具速度控制迴路與位置控制迴路 的雙迴路 PID 控制器,如圖 41,PIDr為 PID 傾斜速度(tilting rate)控制器,PIDp
為PID 傾斜位置控制器,所有的量測訊號都經過二階 3Hz 低通濾波器所過濾,濾
除不要的系統振動訊號,這樣的架構較能精準的控制傾斜位置。
更進一步地,我們將利用設計出來的 QFT/H∞控制器,來求得應有的 PID 控
制器參數值,使其對命令的跟從性更好且具較佳的干擾抵抗力也較強,因此稱之
為強健雙迴路PID 控制器,求得步驟流程圖如圖 42 所示,其中,Gm為增益邊界
( gain margin),而 Wg為其相對應頻率;Pm為相位邊界(gain margin),而 Wp為其 相對應頻率。先任意給定PIDr的 KP和 KD,再藉由設計其 KI使得經由 PIDr控制 之系統的穩態誤差與H∞傾斜速度控制器所控制之系統相近,再設計其KP和KD, 使得PIDr控制之系統的Gm、Wg、Pm和Wp與H∞速度控制器所控制之系統相近, 然後設計 PIDp 之參數,使得整體閉迴路系統的 Gm、Wg、Pm 和 Wp 能夠與經由 QFT/H∞所控制之系統相近,兩系統的Gm、Wg、Pm和Wp如表 3 所示,最後確認 全系統之頻域響應在趨勢上是否能進入上下邊界範圍內(允許區間),如圖 43,其 中藍色線為上邊界函數之頻域響應,綠色線為下邊界函數之頻域響應,藍色虛線 為雙迴路PID 控制器所控制之整體閉迴路系統頻域響應,圖中顯示全系統之頻域 響應在趨勢上可進入上下邊界範圍內(允許區間)。 最後再設計一前置濾波器頗補償系統在高頻的性能,此處為了舒適性的考量 設計一個一階低通濾波器(480Hz)濾除高頻率控制命令,其頻率響應與上下邊界關 係如圖 44 所示,所得到之 PID 控制器參數值分別為式(4.28)與(4.29)。此一設計 流程,使得PID 參數可以被更系統化地求出並且不需要經過全系統的模擬,它只
需要確認系統之Gm、Wg、Pm和Wp與QFT/H∞控制器所控制之系統是否相近,並 確認全系統之頻域響應是否能落入允許區間內,完成後,其整體閉迴路系統與上 下邊界函數的頻域響應之關係如圖 45 所示,其中紅色線為第 4 章中所設計 QFT/H∞控制器所控制之系統的頻率響應,發現強健雙迴路 PID 控制器所控制之 系統頻域響應可合乎規格,並且與 QFT/H∞控制器之性能相近,差距之處主要在 於H∞傾斜速度控制器為四階(4th order)控制器階次較 PIDr高許多。 2
( )
K s
DK s K
P IPID s
s
+
+
=
(4.27) 2370
2305
15200
( )
rs
s
PID s
s
+
+
=
(4.28) 20.252
11.5
0.25
( )
ps
s
PID s
s
+
+
=
(4.29) +−
r
r
1 1d
2d
y
+−
圖41 強健雙迴路 PID 傾斜動作控制系統任意給定PIDr的KP和KD,再設計其KI, 使得經由PIDr控制之系統的穩態誤差與 與H∞速度控制器所控制之系統相近。 設計PIDr的KP和KD,使得PIDr控制之系 統的Gm、Wg、Pm和Wp與H∞傾斜速度控制 器所控制之系統相近。 設計PIDp之KP、KI和KD,使得整體閉迴 路系統的Gm、Wg、Pm和Wp能夠與經由 QFT/H∞所控制之系統相近。 確認整體閉迴路系統之頻域響應,在趨 勢上是否可以落入 ? 設計前置濾波器Fil(如果需要), 使得整體閉迴路系統頻域響應可以落入 。 否 是 圖42 強健雙迴路 PID 控制器之設計流程圖
Upper Lower PID 圖43 上下邊界函數與無前置濾波器強健雙迴路 PID 控制系統之頻率響應 Upper Lower PID 圖44 上下邊界函數與具前置濾波器強健雙迴路 PID 控制系統之頻率響應
表3 QFT/H∞控制系統與強健雙迴路控制系統之Gm、Wg、Pm與Wp 規格 QFT/H∞控制器 強健雙迴路PID 控制器 Gm 9.4 (dB) 9.7 (dB) Wg 111.3 (rad/s) 81.3 (rad/s) Pm 85.3 (deg) 86.14 (deg) Wp 12.1 (rad/s) 12.0 (rad/s) Upper Lower PID QFT/H∞ 圖45 QFT/H∞控制系統與強健雙迴路PID 控制系統之頻率響應比較