國
立
交
通
大
學
電機學院 電信學程
碩
士
論
文
5.8GHz 都卜勒雷達系統設計與整合
Design and integration of 5.8GHz Doppler Radar System
研 究 生:李文龍
指導教授:鍾世忠 博士
5.8GHz 都卜勒雷達系統設計與整合
Design and integration of 5.8GHz Doppler Radar System
研 究 生:李文龍 Student:Wen-Lung Lee
指導教授:鍾世忠 博士 Advisor:Dr.Shyh-Jong Chung
國 立 交 通 大 學
電機學院 電信學程
碩 士 論 文
A ThesisSubmitted to College of Electrical and Computer Engineering National Chiao Tung University
in Partial Fulfillment of the Requirements for the Degree of
Master of Science in
Communication Engineering March 2011
Hsinchu, Taiwan, Republic of China
5.8GHz 都卜勒雷達系統設計與整合
研究生:李文龍 指導教授:鍾世忠 博士
國 立 交 通 大 學 電 機 學 院 電 信 學 程 碩 士 班
摘要
本篇論文在研製一個
5.8GHz 都卜勒雷達系統的前端電路,其電路架
構具有簡單化、縮小化、低成本及低消耗功率之優點。利用都卜勒效應來
偵測物體的移動速率,並使用分合波器來完成單一天線的發射與接收信號
不需外加環形器。其錐形天線陣列的天線增益為 8dBi,傾斜角為 50 度(水
平仰角為
40 度),半功率波束為 40 度。5.8GHz 都卜勒雷達系統的前端電
路,包括
5.8GHz 壓控振盪器、混波器、天線陣列、中頻放大器等,來完
成此電路設計,並將此雷達安裝於車輛的底部進行測試,最後用示波器和
數位訊號處理器(DSP),來量測此收發機的特性,可以清楚的接收到目標
物所反彈回的都卜勒信號。
Design and integration of 5.8GHz Doppler Radar System
Student: Wen-Lung Lee Adivisor: Dr. Shyh-Jong Chung
Degree Program of Electrical and Computer Engineering
National Chiao Tung University
Abstract
In this thesis, a 5.8GHz Doppler radar system has been developed. The
advantages of the radar were simple, compact size, low cost and low power
consumption. The hybrid mixer with particular characteristic of passing LO
power to antenna port is proposed to provide the velocity for a moving target,
which the transmitted radar signal and the received echo signal pass through
the same antenna with no circulator. Taper antenna array has 50degree
tilt-beam (40degree from horizontal plane), 8dBi gain, 40degree Half Power
Beam-width (HPBW). This 5.8GHz Doppler radar consist of the 5.8GHz
voltage control oscillator (VCO), hybrid mixer, antenna array and IF
amplifiers which has been design to accomplish 5.8GHz Doppler radar system.
The radar is demonstrated in the car to measured its performances. Finally, the
designed Doppler radar transceiver is measured by an Oscilloscope and Digital
Signal Processing (DSP).
誌謝
首先要感謝我的指導教授-鍾世忠博士在碩士班其間求學與研究的路上給我很大 的學習空間,並且在需要的時候給我專業的指導與提醒,讓我可以一步一步地克服研究 中所遇到的困難,實在讓我受益良多。感謝口試委員唐震寰教授、和楊育群博士百忙 之中撥空參加學生的口試,並給學生的研究論文中需要改進的地方,詳加指出。 另外要感謝實驗室的學長姊:丹雄、侑信、菁偉、肇堂、凱哥、達叔、少華、浩 宇給我的幫助與建議,讓我在學習上有更多的助力。同時還要感謝實驗室的成員:柯 柯、志謙、珮華、雷達組:阿甘、豪哥、益吉與硯澤,以及所有幫助過我的人等對我 的指導與幫助。 同時也要感謝公司同事對我的幫助,包含我的老闆-甲文,志銘、敏雄、清文、宇 帆、任為、資鑫和珀彥等同事,讓此收發機的各元件可以得到驗證。 最後要感謝父母親對我的養育之恩,岳父母、哥哥、弟弟、老婆以及小孩的支持, 特別要感謝我的老婆-秉樺,有她一路上的支持與付出,讓我無後顧之憂可以專心的研 究。感謝所有幫助過我的人,此論文才得以順利完成。阿彌陀佛
李文龍 2011/3 於交通大學
目錄
中文摘要 ………i 英文摘要………ii 誌謝 ………iii 目錄………iv 圖目錄 ………v 表目錄 ………vii 第一章 緒論………1 第二章 雷達系統………3 2.1 雷達基本理論………3 2.2 雷達的分類………5 2.3 都卜勒雷達系統架構………8 第三章 微波電路之設計基礎理論 ………10 3.1 振盪器原理 ………10 3.2 混波器原理 ………14 3.3 天線陣列原理 ………17 第四章 模擬,實作與測量………27 4.1 振盪器模擬,實作與測量………27 4.2 混波器模擬,實作與測量………31 4.3 天線陣列模擬,實作與測量………33 4.4 中頻放大器實作與測量 ………38 4.5 收發機整合及量測 ………42 第五章 結論 ………52 參考文獻 ………A圖目錄
圖 1.1 行駛的視野圖……… 2 圖 2.1 (a)脈衝波雷達 與(b)FMCW 雷達……… 5 圖 2.2 車子(a)遠離 (b)接近 狀態下的都卜勒效應……… 6 圖 2.3 FMCW 雷達系統傳送與接受示意 ……… 7 圖 2.4 都卜勒雷達系統方塊圖……… 8 圖 2.5 5.8GHz 都卜勒雷達的架構 ……… 8 圖 2.6 都卜勒雷達的應用……… 9 圖 2.7 測速照相相對位置圖……… 9 圖 3.1 振盪器架構示意圖 ……… 10 圖 3.2 振盪器的組態分類 ……… 11 圖 3.3 單埠負阻振盪電路 ……… 12 圖 3.4 平衡式混波器電路 ……… 14 圖 3.5 平衡式混波器電路訊號分析 ……… 17 圖 3.6 矩形微帶貼片天線模型 ……… 18 圖 3.7 貼片天線輻射場型 ……… 22 圖 3.8 貼片天線輻射場型 ……… 23 圖 3.9 兩埠饋入微帶天線之傳輸線等效模 ……… 24 圖 3.10 天線陣列……… 25 圖 4.1 壓控震盪器電路圖 ……… 27 圖 4.2 壓控震盪器實體電路圖 ……… 27 圖 4.3 輸入阻抗之實部與虛部模擬圖 ……… 28 圖 4.4 輸出頻率與電壓關係圖 ……… 28 圖 4.5 輸出頻率與功率量測圖 ……… 29 圖 4.6 Phase Noise 的量測圖 ……… 29 圖 4.7 輸出 Harmonics 的量測圖……… 30 圖 4.8 混波器電路圖 ……… 31 圖 4.9 混波器實體電路圖 ……… 31 圖 4.10 中頻量測圖……… 32 圖 4.11 天線陣列布局圖……… 33 圖 4.12 天線陣列實體電路圖……… 33 圖 4.13 天線陣列模擬圖……… 34圖 4.14 天線陣列場型模擬圖……… 34 圖 4.15 反射損耗模擬與量測比較圖……… 35 圖 4.16 輻射場型模擬與量測比較圖……… 35 圖 4.17 天線陣列加 Acry 實體圖………36 圖 4.18 天線陣列加 Acry 輻射場型量測圖………36 圖 4.19 加 Acry 輻射場型量測比較圖………37 圖 4.20 中頻放大器電路圖……… 38 圖 4.21 DC 轉換量測圖………38 圖 4.22 中頻放大器實體電路圖……… 39 圖 4.23 中頻放大器輸入與輸出量測圖……… 39 圖 4.24 5.8GHz 都卜勒雷達架構圖 ……… 40 圖4.25 5.8GHz 都卜勒雷達訊號分布圖 ……… 40 圖 4.26 都卜勒雷達模擬接收功率圖……… 41 圖 4.27 Spectrum量測架設圖 ……… 42 圖 4.28 Spectrum量測圖 ……… 43 圖 4.29 DSP量測架設圖 ……… 45 圖 4.30 DSP量測圖 ……… 49 圖 4.31 Spectrum量測圖 ……… 50 圖 4.32 DSP量測圖 ……… 50
表目錄
表 1.1 內政部警政署國道公路警察局歷年取締違規分析統計……… 1
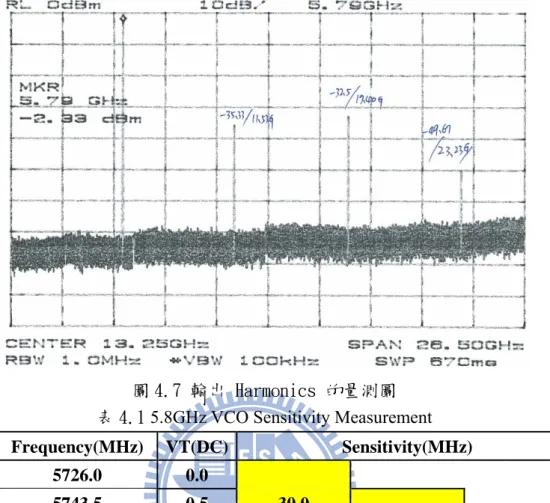
表 4.1 5.8GHz VCO Sensitivity Measurement……… 30
表 4.2 5.8GHz VCO Measurement Data……… 30
表 4.3 Conversion Loss 量測 ……… 32
第一章 緒論
本研究的目的,利用微波的都卜勒效應(Doppler effect)來研製一套微波都卜勒雷 達系統,用以量測物體的移動速率,可應用於汽機車本身的車速偵測、公路上的車流量、 及測速照相等等。 國人普遍駕駛習慣不良,而道路交通事故的發生常常就是因為用路人不守法的行為 所致,交通違規雖不至於一定造成事故的發生,但其危險性及對其他用路人的不良影響 亦會對社會造成嚴重的成本。根據表1.1內政部警政署國道公路警察局歷年取締違規分析 統計,歷年違規事件都以超速最多。一般而言,較高的行車速率會增加駕駛人煞車時所 需距離,相對之下減少了駕駛人發現突發狀況後的反應時間;而造成用路人重傷或死亡 與事故當時車輛衝撞所釋放的能量有關,釋放能量的大小與質量和速度的平方成正比, 故行車速率愈快,衝撞時產生的衝擊力愈大,受傷或死亡的機率愈高。 車速愈快,視力及視覺界限則會隨速度之增加而降低,圖1.1所示,駕駛人往往由於 駕駛習慣不良,常有超速行為之情形發生,較高的行駛速度或是較高的速度變異其結果 可能導致較多及較嚴重的事故,為改善駕駛人的超速行為,國內外學者研擬出許多方 案,仍未能有效抑制超速行為。但隨著科技的進步,所能夠採用的改善策略也隨之增加, 國內目前已經普遍設立自動執法測速照相系統,來嚇阻駕駛人超速,以及測速顯示器等 反饋標誌的相關研究。 表 1.1 內政部警政署國道公路警察局歷年取締違規分析統計 資料來源:內政部警政署國道公路警察局[1].行駛的視野 10 km/h 30 km/h 50 km/h 70 km/h 180m 90m 70m 55m 圖 1.1 行駛的視野圖 資料來源:交通部全球資訊網 因此本研究將利用微波的都卜勒效應(Doppler effect)來研製一套微波都卜勒雷 達系統,用以量測物體的移動速率,而主要目地就是為研製都卜勒雷達系統中的各部 份功能,包括壓控振盪器、混波器、天線陣列…及整個雷達系統的整合量測。[2-8]. 論文共有五個章節,第二章為雷達系統基本理論,說明雷達基本原理及都卜勒雷 達系統架構,第三章則是微波電路設計基本原理的介紹包含壓控振盪器、混波器、天 線陣列…等等,第四章則是各個功能方塊的模擬、實作量測、測試的結果,及收發機 整合及量測,最後第五章為結論及未來工作的重點。
第二章 雷達系統
2.1 雷達基本理論
2.1.1 雷達發展沿革[9-10] 早在西元1873年即已有雷達可能出現的啟示,當時英國物理家-馬克斯威爾(James Clerk Maxwell,1831-1879)藉數學預測出,一種他稱之為幅射波(Radiation)的東西(以後被 證實為無線電波),具有許多與光線相同的特性。他特別指出,此放射波之速度與光線 相同,而可自其行經路途中之任何物體反射。西元1888年,德國物理家-赫茲(Henrich Hertz,1857-1894),證實無線電波可確實產生,而具有馬克斯威爾所預測的特性。以德 國物理學家─昆特(A. Kundt, 1839-1894)的駐波測聲速的方法,經由觀察、量測和計算得 到電磁波的速度和光的速度接近,證實電磁波的存在和光也是一種電磁波,而且進一步 地實驗電磁波的特性。在赫茲的文獻發表之後,當時的物理學界立即重複他的實驗方 法,幾年之後電磁波的無線電技術開始發展。雷達(Radar)是“Radio Detection and Ranging"縮寫的音譯,當年由F.R.孚爾特 (Furth)和S.M.塔格爾(Tucker)這兩位美國海軍軍官所創造。由字面可知雷達係利用 無線電原理,以探測目標之存在,並測定目標所在之方向、距離、高度等,並對目標物 予以辨認。 雷達的起源可從無線電的發現說起,不過真正將無線電使用在探測目標上的裝置是 在1922 年美國海軍實驗研究室的實驗所建立的,因為其可主動、無跡象且迅速地偵測 到目標,而符合戰爭的需要加速了雷達的研製與改進,期間經歷過縮減對空目標的所需 搜索時間,以及於英國泰晤士河畔建立了防空雷達網,在第二次世界大戰期間共發展了 64 種不同的雷達,而於戰後始自軍中推廣至民間,至今廣泛應用在航海、航空等領域。 2.1.2 雷達基本原理 雷達是現今用來偵測物體最普遍的方法,舉個生活中比較容易讓大家了解雷達原 理的例子,當在夜晚停電時,大家常用的手電筒在黑暗的夜裡照射目標物時,手電筒 之光可將物體照亮,有一部份的光線反射到你的眼中,讓你可以感受到有物體的存在, 當電筒離開目標物,因為沒有反射光線,你就將看不見物體。這就跟雷達的原理是相 同,因為光線的行為跟電磁波的行為是相同的,我們雷達藉著傳送端產生出高功率電 磁波,此電磁波經由天線輻射出去形成所要的雷達波。當發射出去的雷達波在空間中 掃瞄,碰到目標後部分反射之電磁波經由雷達的接收天線回到接收端,稱之為回波; 回波再經過濾波、放大等程序,與發射波相對應比較,據以偵測目標是否存在,進而 決定其距離、方向、高度、速度和其他資訊,並藉雷達顯示器加以顯示出來,此即為 雷達之基本原理。
利用電磁波碰到物體表面會反射的特性,我們可以得到欲偵測物體的資訊: 1. 距離:脈衝波跟 FMCW 雷達的計算方式不同。以脈衝波雷達而言,是測量 脈衝波發射與接收到回波的時間差;至於 FMCW 雷達則是用固定速率改變 發射波頻率,再比較發射與回波的頻率差值,藉以得到電磁波由發射機到目標 物,經過反射折回的時間。 2. 目標的相對速度:運用都卜勒效應。若雷達與目標在波的行進方向有相速度, 則觀測到的頻率會隨著相對速度的大小產生頻率漂移。 c vf f o d 2 = (2.1-1) 其中 v 為雷達與目標物之相對速度在電磁波行徑方向上的分量,c 為光速
(
c=3×108ms)
, o f 為發射電磁波頻率, f 為都卜勒偏移頻率。接收到的電d 磁波頻率為 fo ± fd,正號表示該目標物體正在接近中,負號則表示遠離中。3. 方位:我們可用多個雷達偵測單元(Radar Detection Unit,RDU),不同雷 達偵測單元對同一個物體所解得的距離均不相同,所以可從中間得出目標物 的方位。 2.1.3 雷達方程式 雷達系統的雷達方程式(radar equation)表達如下
( )
3 4 2 24
R
G
P
P
t rπ
σ
λ
=
(2.1-2) 其中 r P = 天線端所接收到的功率 t P = 天線端所發射的功率 G = 天線增益 R = 雷達到目標物之間的距離 λ = 波長 σ = 雷達截面積 從雷達的接收端所接收到的信號,通常會因為電磁波在自由空間的傳播過程當中, 受到大氣的影響或因為接收機電路本身而產生雜訊。在這裡信號雜訊比(signal to noise ratio,SNR)定義如下( )
t O O R N G P N S SNR 3 4 2 2 4π σ λ = = (2.1-3) 接收端的雜訊可能由接收器本身產生或經由接收端的天線而進入接收機。在這裡接 收機的熱雜訊(thermal noise)如下所示 n kTB noise Thermal = (2.1-4) 這裡的k 為波茲曼常數(Boltzmann’s constant),它等於1.38×10−23JK;T 為有效的雜訊 溫度而B 為等效的雜訊頻寬。因此全部接收機所接收到的雜訊為 n n o FKTB N =(2.1-5) 這裡的F 為雜訊指數(Noise Figure)。因此在考量接收端雜訊的情況下,單一個脈波所造 成的信號雜訊比為
( )
R kT B F G P SNR n O t 4 3 2 2 4π σ λ = (2.1-6)2.2 雷達的分類
依照發射波形分類,雷達系統一般分成有「脈衝波雷達(Pulsed Radar)」及「連續波 雷達(Continuous-wave Radar)」,而連續波雷達再分成「頻率調變連續波雷達(FMCW Radar)」與「都卜勒雷達(Doppler Radar)」。 (a) (b)第一種為脈衝波雷達:此型雷達是以脈衝波調變方式發射連續的方形脈衝波,以偵 測目標,其中方型脈衝波之間稱為脈衝波寬度(Pulse Width),亦即雷達發射電磁波之持 續時間,脈衝波波幅大小則表示電達發射之峰值功率(Peak Power),一個脈衝波結束到 下一脈波間稱為脈衝波重復週期(Pulse Repetition Time),每秒單位時間內所產生的脈衝 波數量則稱之為脈衝波重復頻率(Pulse Repetition Frequency)。
第二種為連續波雷達:除脈波雷達外,最早被廣泛應用的電達就是連續波雷達, 又稱等幅波雷達,二次大戰期間英軍使用的預警雷達以及目前高速公路上警車用的測 速雷達皆屬此類,連續波雷達有兩個不同的雷達天線分別負責發射和接收,早期的連 續波雷達是由雷達回波的有無來判斷偵測範圍內是否有物體,並得到其方位,但無法 獲知目標物的距離及速度。因此發展出下面兩種雷達: 一種為都卜勒雷達:是應用都卜勒效應(Doppler Effect)的原理來測量出目標物與 雷達之間的相對運動,藉以算出目標物的速度。都卜勒效應的主要理論為「當一個輻 射源或傳送端正在發射一個固定頻率的電磁波時,若傳送端與接收端有相對運動,則 接收端所接收到的電磁波頻率會與傳送端所發射的頻率不同, 產生頻率漂移(Frequency Shift),其頻率漂移與相對速度的徑向速度成正比」。當 接收端接收到物體反射的雷達回波時,若物體是遠離雷達的狀況下,所收到的回波頻 率會減少,反之收到的頻率會增加,如圖 2.2 所示。 TX ft RX ft-fd RX ft+fd TX ft (a) (b) Vehicle Vehicle 圖2.2 車子(a)遠離 (b)接近 狀態下的都卜勒效應 另外一種為頻率調變連續波雷達:由於連續波雷達只是發射一個固定頻率的電磁 波,所以僅能得知物體的存在與否,並無法得知其距離,而此型 FMCW 雷達就是用 頻率調變的方式,發射出一組頻率隨著時間而改變的電磁波,再運用雷達波與雷達回 波的頻率差,算出物體的距離。
fc
t
fbf
fc+ f
Δft
Transmit Signal Receive Signal T 圖2.3 FMCW 雷達系統傳送與接受示意圖 偵測距離的方式如下,圖2.3 則是此系統發射接收示意圖。由於此系統是產生一個 頻率隨時間改變的連續波訊號(
fc ≤ f ≤ fc +Δf)
,假設在時間t =0時透過天線發射出去 [圖2.3實線],此時的雷達波頻率為 f(
t = 0)
= fc,而在時間t =Δt2時,雷達波碰到目標 物反射,其回波在時間t=Δt時被接收天線收到[圖2.3虛線] 。 由於發射訊號的頻率是以ΔtT (T為此三角鋸齒波(Ramp)的週期)的斜率在改變,所以在 時間t=Δt時,傳送端的頻率為(
t t)
fc f T t f = 0+Δ = +⎜⎝⎛Δ ⎟⎠⎞Δ (2.2-1) 假設此時頻率差為 f ,我們只要將發射天線與接收天線的訊號送入混波器(mixer)b 做混波,即可得到 f ,又由於頻率改變的速度b ⎜⎝⎛ΔfT⎟⎠⎞是我們所能控制的,依據相似三 角形的特性,所以我們可以計算出時間延遲 T f f t b ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Δ = Δ (2.2-2) 因而反推目標物的距離就是( )
t2 c d = Δ (2.2-3)2.3 都卜勒雷達系統架構[11-20] 圖2.4所示就是都卜勒雷達系統的方塊圖,其結構比脈波雷達簡單許多,主要的原因是 這種系統使用的是連續波,而不是脈衝波;因為接收信號的頻率會偏移,所以發射機的 振盪器,也同時做接收機混波器的本地振盪器用。 Circulator Antenna fo fo fo±fd fo±fd fo v σ fd fd fd Filter Amplifter Display f 圖 2.4 都卜勒雷達系統方塊圖 本論文採用平衡式混波器 ( hybrid mixer ),其有射頻端與本地振盪端較好的隔離 度,及消除來自本地振盪訊號的調幅雜訊。其架構如圖2.5所示
DSP
Amplifier MCU Display Doppler Spectrum FFT fd+180° fd Hybrid Mixer LPF Antenna fo±fd σ v fo VCO ATT LPF LPF fo Differential + -圖 2.5 5.8GHz 都卜勒雷達的架構其可應用於車輛的速度偵測、測速照相等等。如圖2.6、圖2.7 Vehicle 柏油路 θ=90° Radar θ=0° 圖 2.6 都卜勒雷達的應用 XX 測速顯示器 50 警告標示 測速照相 175m 偵測範圍 25m 50m 150m 圖 2.7 測速照相相對位置圖
第三章 微波電路之設計基礎理論
3.1 振盪器原理[21-22]
近年來無線通訊快速的發展, 壓控振盪器(Voltage Controlled Oscillator,VCO)已 成為不可以缺少的一個部份,無論是在本地振盪器、載波信號或是鎖相迴路都必須使用 到壓控振盪器(VCO),所以我們知道振盪器在系統中的重要性,所以對它的品質有要嚴 格的標準要求。壓控振盪器的原理是將變容二極體(Varactor Diode) 安置在振盪線路的 其中部分,藉由控制電壓的變化而改變變容二極體的電容量,諧振電路的諧振頻率因而 改變,從而達到改變振盪頻率的目的。下面就詳細的來說明振盪器的工作原理。 振盪器由三個基本單元所組成的,這三個基本單元分別是主動元件、諧振電路及一 個輸出負載,如圖3-1 所示。 諧振電路 主動元件 輸出負載 圖 3.1 振盪器架構示意圖 主動電路所構成的放大器是被用來提供放大增益的,諧振電路用來選取特定的信號 頻率,最後則將我們所需要的振盪訊號輸出至負載。當直流電源加至振盪電路時的瞬 間,電路的輸出端點將只會產生雜訊,這時儘管我們所使用的放大器是一個理想的無雜 訊放大器,但是由於組成諧振電路的被動元件仍具有耗能特性,故必定會在諧振電路上 產生雜訊,而此雜訊信號經過放大器放大後,其中部分信號會出現在負載上,其餘的經 過具有濾波功能的諧振電路時都會被濾掉;而處於諧振電路頻率範圍內的雜訊雖有所衰 減,但仍可通過諧振電路,並會再被放大而送到負載端,之後便持續不斷的依此工作而 在輸出端產生一特定信號的頻率。 圖3.2 列出了常用的三種振盪器型式,分別是考畢子(Colpitts)、哈特萊 (Hartley) 與克萊普(Clapp),再配合上電晶體是採用共基(閘)、共集(汲)或是共射(源)極組態,就 可以有多種的振盪器型式選擇。而振盪器的振盪頻率,決定於電路中的LC 諧振電路, 調整電感或電容的數值可以改變電路上的振盪頻率。通常設計壓控振盪器時,都以調電 容值或改變變容二極體上的逆向偏壓值(其電容值會隨逆向偏壓的值做比例上的改變) 來改變振盪器的輸出頻率。
考畢子振盪器 哈特萊振盪器 克萊普振盪器 圖 3.2 振盪器的組態分類 一般而言,解析振盪器的方法可歸納兩種:一種是採用反射型式的觀念,另一種則 是採用回授式的觀點。此兩種不同的解析方式在實際進行電路設計與測量時,反射型式 是採用單埠的量測方法,而回授式則是採用雙埠的測量方法。另在分析設計時,回授型 式可以轉成反射型式的來設計,但反射型式的卻不一定能夠轉成回授型式的電晶體振盪 器結構,而在這種結構下很難將電路轉成回授式來分析,所以在頻率較高的要求下,大 多使用反射型式的解析方法。因為本論文VCO所採用的設計方式為反射式的設計觀念, 所以我們將討論之。 圖3.3 所示為一個單埠網路的負電阻振盪電路示意圖。將該振盪電路分成兩個部份 來討論,左半部為主動(Active)元件的網路,其等效電路是由電阻RG 串聯一個電抗XG 所 表示(或者是由電導GG 並聯一個電納BG 來表示); 右半部電路則是包含諧振電路(Tank Circuits)的網路,等效電路由電阻RL 串聯一個電抗XL來代表(或者是由電導GL 並聯一個 電納BL 來表示)。由克希荷夫電壓定律寫出圖3.3(a)中穩態振盪時的迴路電壓關係式如式 (3.1-1)所示:
0
)]
(
)
[(
R
G + jX
G+
R
L + jX
L ×I=
(3.1-1)Γ
G
Γ
L
R
G
jX
G
jX
L
R
L
(a) 串聯等效電路jB
GG
GΓ
GΓ
LG
LjB
L (b) 並聯等效電路 圖 3.3 單埠負阻振盪電路 因為I ≠ 0 ,所以 0 (RG +RL)+ j(XG +XL)= (3.1-2) 由上面式子可以進一步推得下列結果: 0 = + L G R R XG + XL = 0(3.1-3) 同理一樣可以由3.3(b)圖推出下列的結果: 0 = + L G G G 0 = + L G B B
(3.1-4) 有了式子(3.1-3)與式(3.1-4)的結論後,接著使用反射係數來解析圖2-3 網路,由微波電 路觀點可知: L L O O L L O L O L L Z jX R Z jX R Z Z Z Z + + − + = + − = ) ( ) ( Γ O G L O G G O G O G G Z jX R Z jX R Z Z Z Z + + − + = + − = ) ( ) ( Γ (3.1-5)、(3.1-6) 將式子(3.1-5)和(3.1-6)相乘,並利用式子(3.1-3)的結論可以得到下列結果:
(
)
(
)
⎥⎦
⎤
×
⎢⎣
⎡
(
(
)
)
⎥⎦
⎤
=
1
⎢⎣
⎡
=
Γ
×
Γ
+ + − + + + − + O L L O L L O L L O L L G LR
jX
Z
Z
jX
R
Z
jX
R
Z
jX
R
(3.1-7) 由前面的討論可以歸納出一個穩定振盪的振盪器電路具備下列條件: 1 = × Γ ΓL G(3.1-8) 式子(3.1-8)與式子(3.1-3)、(3.1-4)所代表的物理意義相同,都可以用來表示振盪器 處於穩定狀態下所需要滿足的條件。以能量的觀點進一步分析振盪電路,因為諧振電路 是由被動元件所組成的,所以會消耗由主動電路所提供的能量;如果諧振電路的反射係 數ΓL 的大小越接近於1,那表示入射到諧振電路能量大部份都被反射回去,因此諧振電 路所消耗的能量則是越少。正因為諧振電路是由被動元件所組成,因此要維持在穩定的 狀態,則必須由主動電路(ΓG)來提供諧振電路所需要消耗的能量。如圖3.3(a)所示,已 知右半部電路為包含諧振電路的網路,一般情況下皆為被動(Passive)網路,所以反射係 數ΓL 必定小於1(就是說此網路中所含的等效電阻成分必須為正的值),在此一條件下的 穩定振盪器必須要同時滿足式子(3.1-8)的條件,因此ΓG 必須大於1, ΓG 大於1 表示 包含主動元件的網路部份含有負電阻成分。從電路學的觀點來看正值和負值電阻所代表 的意義,正值的電阻代表會消耗能量的元件,而負值的電阻則是用來表示產生能量的元 件。因此,諧振電路所消耗的能量是由主動電路部份所提供,且主動電路所產生的能量 必須大於被動網路所需要消耗的能量,才有可能打破原來所處的平衡狀態進一步才可以 達到起振的條件。 綜合前面所述並參考圖3.3 的表示方式,可以得到以下的結論: 1. 起振條件:
ΓLΓG > 1
(3.1-9) 或是 L R G R > 0 = + L G X X (3.1-10) L G G G >
BG + BL = 0 (3.1-11)
2. 維持穩定振盪條件:
ΓLΓG = 1
(3.1-12) 或是 0 = + L G R R 0 = + L G X X (3.1-13) 0 = + L G G G BG + BL = 0 (3.1-14) 對振盪器而言,它是屬於非線性電路(Nonlinear Circuit)。振盪器在振盪的過程中, 訊號的振幅會隨著時間而改變,因此電路的直流工作點不可再視為是固定不變。而一般 由網路分析儀所量測到的S 參數是小訊號參數,但是使用小訊號S 參數來設計分析及預 測振盪器的振盪頻率卻是可行的。
3.2 混波器[23-26]
平衡式混波器的電路如圖3.4所示。基本上是由兩個單端混波器經由一個3dB的相 位轉換器所組成的,這樣設計會得到較低的 Return Loss,而且前端電路與LO之間有較 好的阻隔性。 RF input LO input 3dB hybrid Diode 1 Diode 2 i1 i2 LPF IF output LPF 圖 3.4 平衡式混波器電路 平衡式混波器的電路如圖3.4 所示,是由3dB耦合器所驅動的兩個阻抗匹配的單端 混波器。若有一個小雜訊電壓vn( )
t 加在 LO 信號上,則分合波器輸入端的 RF 與 LO 電壓為 vRF( )
t =vrcosωrt (3.2-1)( )
t[
v v( )
t]
cosω vLO = o + n (3.2-2)其中vr << 且vo vn
( )
t << ,若該分合波器為直交式(90°),兩個二極體上的電壓為 vo( )
= cos(
−90°) (
+ +) (
cos −180°)
1 t v t v v t v r ωr o n ωo =vrsinωrt−(
vo +vn)
cosωot (3.2-3)( )
= cos(
−180°) (
+ +) (
cos −90°)
2 t v t v v t v r ωr o n ωo =−vrcosωrt+(
vo +vn)
sinωot (3.2-4) 二極體 V-I 特性中的二次式會由上述的輸入產生所需的輸出,所以我們先考慮二 次式項的貢獻。假設兩個二極體完全相等,其電流可表示為 i1 =kv12 (3.2-5) 2 2 2 kv i =− (3.2-6) 式中的負號是因為其中一個二極體的極性相反所致。將 (3.2-3,4) 代入 (3.2-5,6) 可 得二極體的電流為(
)
(
)
[
v w t v v w t v v v t t]
ki r2sin2 r o n 2cos2 o 2 r o n sinωr cosωo
1 = + + − + (3.2-7)
(
)
(
)
[
v w t v v w t v v v t t]
k
i r2cos2 r o n 2sin2 o 2 r o n cosωr sinωo
2 =− + + − + (3.2-8) 經過濾波器後,所剩的是 DC 、雜訊、與 IF:
(
)
(
)
⎥⎦⎤ ⎢⎣ ⎡ + + − + =k v v v v v v t i r o n r o n sinωi 2 1 2 1 2 2 1 (3.2-9)(
)
(
)
⎥⎦⎤ ⎢⎣ ⎡ + + + + − = k v v v v v v t i r o n r o n sinωi 2 1 2 1 2 2 2 (3.2-10) 其中ωi =ωr −ωo為 IF 頻率,將兩式的電流加總,可得 IF 輸出為 iIF =i1+i2 =−2kvr(
vo +vn)
sinωit≅−2kvrvosinωit (3.2-9) 上式用vn << 。此式說明雜訊電壓的一次項會被混波器消去,而所需的 IF 信vo 號倒是同相位相加。這種混波器可將 AM 雜訊降低 15 到 30 dB。1).LO to IF Port LO LO IF- IF+ 2).IF to LO Port (Out of Phase) IF+ IF- Echo Echo LO Echo LO IF+ IF- IF+ IF-
3).IF to Echo Port Inphase
4).Echo to IF Port
圖 3.5 平衡式混波器電路訊號分析
3.3 天線陣列原理[27-38]
3.3.1 傳輸線模型 對於矩形的貼片天線(Patch Antenna)最簡單的分析方式是使用傳輸線理論,將貼 片天線視為兩條平行且具有輻射能力的槽孔。換言之,矩形的貼片天線是依靠兩邊的 漏電場輻射,如圖 3.6 ;而漏電場會影響貼片天線的長度,因此半波長的貼片天線長 度一般會略小於介質基板中的半波長。在傳輸線模型的分析中,可將矩形貼片天線視 為一段長度為半波長,且端點為開路的傳輸線。 W X Y Z L h Patch Substrate εr Ground PlaneW L MS Feed Slot #1 Slot #2 E Y X Patch Feed Patch Z θ 圖 3.6 矩形微帶貼片天線模型 利用傳輸線模型來分析貼片天線,其共振頻率如式(3.3-1)所示。在實際考量上, 漏電場的存在會讓貼片天線的長度比實際所見略長。式中的參數 q 在同樣的基板以及 頻率範圍下是一定值,而此值會影響計算之共振頻率的準確性。 r r l c q f ε 2 = (3.3-1) 3.3.2 共振腔模型 雖然傳輸線模型用於分析貼片天線方便又容易,但還是有一些限制,傳輸線模型 忽略了饋入端的漏電場不連續,而這樣的缺點與限制在共振腔模型中將能得到解決。 在共振腔模型中,可將貼片天線視為一個由平行金屬面與磁牆組成的 TMz 模態共振 腔。當然,因為一些未輻射的能量與輸入阻抗,使得這只是一個近似的模型,若要精 確的計算,必須把正切損耗與完整的邊界條件都列入考慮。
3.3.3 微帶天線 傳統的微帶天線有矩形和圓形的型式,在此篇論文中將介紹矩形微帶天線的基本的 原理和應用,在電磁學中得知,電磁波在微帶線中的傳輸不是完全的TEM波,雖然大部 分的電場都在介質裡但有部分的電場在空氣中,產生電場的不連續我們將此種傳輸線視 作TEM傳輸線來分析,能得近似的結果,而線上之電磁波模式乃稱為近似橫電磁 (quasi-TEM)模式,當然這種情形只發生於頻率較低的範圍內,換言之較高次模式 (higher order mode)此時並未計及。因此定義了有效的介電常數εe(effective microstrip permittivity),其數學式子如下: 2 1 12 1 2 1 2 1 − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + − + + = w h r r e
ε
ε
ε
(3.3-2) 其中h 為板材的厚度,W 為微帶線的線寬。在微帶線斷路處有邊緣場效應的影響, 因此假設所產生出來的等效傳輸線延伸長度為△L,其斷路處的阻抗為一個電阻和電容 的並聯: o o in G jB Y = + (3.3-3) ⎪ ⎪ ⎪ ⎩ ⎪ ⎪ ⎪ ⎨ ⎧ − = λ π λ λ 120 60 1 120 90 2 2 2 W W W Go λ λ λ λ 2 2 35 . 0 35 . 0 > ≤ ≤ < W W W (3.3-4) o o Z L B = tanβΔ (3.3-5) e h L ε = Δ W >>h (3.3-6) 其中Z 為傳輸線的特性阻抗,也可以使用下列的式子,來計算斷路處的輻射阻抗,o 其中k 為空氣中的波數 o(
2)
2 60 6 e e r W W R + = (3.3-7)在前面已經討論了傳輸線在邊緣的效應,在另一方面電場在每隔半波長其方向將變 換一次,在二個形成斷路的地方,將形成同相的漏電場,如圖3.6 所示,圖中為長度方 向電場的切面圖,在漏電場的區域,電場方向是同方向的,造成輻射電場;微帶天線的 內部,輸入的阻抗趨近為零,在邊緣的地方為最大,可以看成二個斷路處阻抗的並聯, 其輻射電阻如下所示: ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ ⎥⎦ ⎤ ⎢⎣ ⎡ − = = − W W W G R o Ae λ π λ λ 60 30 1 60 45 2 1 1 2 2 2 λ λ λ λ 2 2 35 . 0 35 . 0 > ≤ ≤ < W W W (3.3-9) 就傳輸線的觀點而言,微帶天線的周圍就好像傳輸線的斷路一樣,當傳輸線上的電 流流到天線周圍時會被反射回去。因此電流在天線裡面所感應電磁場會在天線周圍間來 回反射震盪,所以微帶天線可視為一個共振腔,在矩形微帶線中可寫成TMmn的型式如 下所示: 2 1 2 2 2 ⎥⎥⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = w n l m e c fo ε (3.3-10) 寬度W的大小,可以改變其輻射電阻和天線頻寬,若寬度變大,因為輻射面 積變大的關係,所以天線頻寬變大,然而寬度W若太大將造成較高次模(higher order mode) 的產生,例如:使用同軸纜線在寬度的中心饋入,避免產生TM01模(W不滿足二分之一 波長),若此時W為一個波長,將會產生TM02模態,若這時的L的長度也為二分之一波長, 將共同激發二模態TM02和TM10,由於這兩個模態的共振頻率很接近,造成在二個方向 的輻射場型在的不純淨。 在共振腔中最重要的參數為品質因數Q ,大小影響了天線的頻寬,其定義如下 o l e o P W Q ≡ω2 (3.3-11) 其中W 為共振腔內所儲存之電能,e P 為損耗掉之功率。就微帶天線而言,損耗功l 率P 有三種:輻射損耗l P 、介質損耗rad P 及金屬損耗d P 即為: c Pl =Prad +Pd +Pc (3.3-12)
微帶天線的頻寬、品質因數Q 與 VSWR 的關係如下: o O Q VSWR VSWR BW = −1 • 1 (3.3-13) Γ − Γ + = 1 1 VSWR (3.3-14) 其中VSWR為所設計天線饋入電路所允許最大駐波比。品質因數影響了天線整體的 頻寛,在頻帶天線中,若增加板材的厚度h,在邊緣的電場會增加,也就是有效的長度 變長,造成共振的頻率下降,同樣的相對於漏出去的電場增加,所以Q 變小,造成整o 體的頻寛變大;若選擇較高介電係數的板材,則天線的寸尺將縮小,因為高介電係數, 電磁波不易輻射,所以Q 較大,造成天線的頻寬變小,在設計天線時需要正確選擇基o 板,介質損耗不可太大,否則天線的效率降低,影響了天線的增益。一般而言矩形微帶 天線的長度L及寬度W應選擇的尺寸如下: l L e o − Δ = 2 2 ε λ (3.3-15) 2 1 2 1 2 − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + = o r W λ ε (3.3-16) W的長度可以調整輻射電阻R ,其值要相等於傳輸線上的特性阻抗Ae Z ,傳輸線上o 才不會有反射;若使用邊緣饋入時,通常輻射電阻約為200Ω左右,但是200Ω的傳輸線 十分的細,如果無法製造出來可以使用解決方法之一,就是如圖3.8(c) 所示,將微帶 線伸入天線內,使饋入點在天線內,使得饋入的微帶線特性阻抗Z 就會變小。這種方o 法的缺點是必須在天線內挖槽,破壞天線特性。解決方法之二是在天線邊緣饋入點與微 帶饋入線間加一段四分之一波長轉換器,如圖3.8(b) 其轉換特性為: Ae o o Z R Z' = (3.3-17) 3.3.4 基板與饋入 基板的選擇中,其介電係數與正切損耗是最為重要的兩個考量因素。高的介電係 數能夠縮小微波電路的尺寸,但同時也會降低頻寬;而大的正切損耗會讓輻射效率降
一般選擇較厚而且介電係數較低的基板,能夠有較好的輻射效率與較大的頻寬, 但若厚度過高將會激發表面波,使得輻射效率降低。 如前所提到的,無論在傳輸線模型或者是共振腔模型中,貼片天線等效為兩個平 行且具輻射能力的槽孔,圖 3.7 所示為貼片天線所形成的 E-plane 與 H-plane 的輻射 場型。 φ
Radiation due to slot2 Total radiation pattern
Radiation due to slot1
Y X
(a)E-plane 輻射場形
Z Total radiation pattern
θ X (b) H-plane 輻射場形 圖 3.7 貼片天線輻射場型 在微帶天線的設計中,其饋入方式對於天線的特性有相當大的影響,其中較為常 見的幾種如圖 3.8 所示:
(a) probe feed
Δl
(b) Microstrip edge feed with quarter-wave transformer
(b) Aperture couple feed (c) Microstrip feed with inset
L W Δl 圖 3.8 微帶天線饋入方式 使用微帶線饋入天線最基本的規則是在天線上尋找適合的匹配點,在最大的限度 降低反射,以減少饋入的反射損耗。標準的共振矩形貼片天線其邊緣的阻抗約為 100~400Ω,若要直接利用微帶線由貼片天線邊緣饋入,則微帶線的特性阻抗 也必須 有相當高的阻抗才能夠達成匹配而不會有反射,若此時選擇的基板厚度很薄或者其介 電係數(εr)很大,則如此高阻抗的微帶線會因為太細而無法實現,解決的方法之一就 如同圖 3.8(a)與(c) ,將饋入點選擇在微帶貼片天線之內,使所需的特性阻抗變小。 粗略估計圖 3.8(a)與(c) 狀況下的阻抗如式 2-2 與式 2-3 所示: L l Z Zin = AcosπΔ (3.3-18) 2 2 1 90 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = W L Z r r A ε ε (3.3-19) A Z 為貼片天線邊緣的視入阻抗,而Δl為貼片天線邊緣至欲估計點之間的距離。 圖 3.8(c) 將微帶線伸入貼片天線內,而貼片天線是藉由邊緣的漏電場輻射,因此這 樣的饋入方式會破壞天線特性。而另一種解決方法是在天線邊緣饋入點與微帶饋入線 之間加一段四分之一波長組抗轉換器。阻抗轉換器的特性如式(3.3-20)所示:
A O O Z Z Z '= (3.3-20) 其中Z 為微帶線特性阻抗,0 Z 為貼片天線邊緣的視入阻抗。但是使用組抗轉換A 器的缺點則是必須增加一段四分之一波長的傳輸線面積。 3.3.5 陣列微帶天線設計 本篇論文中,使用串聯饋入微帶天線,形成串接微帶天線陣列,而陣列天線之間 串接的傳輸線地需選擇足夠細以免對邊緣輻射場造成干擾。在傳輸線模型中,因為微 帶貼片天線利用漏電場輻射,漏電場部份可以視為兩個具有輻射能力的槽孔,因此具 輻射能力之槽孔可等效成一個電導(Conductance) G 以及一個電納(Susceptance) B 並 聯,而傳輸線與微帶天線部份則視為寬度不同之傳輸線,因此兩傳輸線之間的不連續 效應已兩個電抗(Reactance)X1、X2 來等效,因此等效模型如圖 3.9 所示。
Z
lineZ
lineZ
patchλpatch
lineZ
X
1B
G
X
2 patchZ
λpatch
X
2X
1 lineZ
G
B
圖 3.9 兩埠饋入微帶天線之傳輸線等效模型 一般而言,因旁波束的大小考量,不會讓陣列天線的能量成均勻分布,因此串接 饋入的天線陣列中每個天線單元寬度需要經過設計。而每個天線單元的設計可如圖所 示,二分之波長的貼片天線加上兩邊各四分之波長的微帶饋入線,可形成一個波長的 天線單元,在這一個波長的天線單元中,即可經由微帶貼片天線的寬度改變來設計此 一天線單元所留下的輻射能量,以及剩餘流出給其他天線單元的能量多寡。3.3.6 陣列因子 圖 3.10 天線陣列 若將天線陣列的每一個天線想像成數個有向點源並且將I 假設成相位線性變化的n 源點,可以將陣列天線對相位的關係寫成下面的式子: θ β θ β 1 cos 0 cos 1 0 ... nd j N n n j I e e I I AF
∑
− = = + + = (3.3-21) α jn n n A e I = (3.3-22) 合併上述式子得到∑
− = = 1 0 N n jn ne A AF ψ (3.3-23) 其中 α θ β ψ = dcos + (3.3-24) 陣列因數是觀測角θ 的函數,與陣列天線的特性無關,但與天線的距離d 有關,若將 上式的AF 用等比級數展開可以寫成下列的式子: ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = 2 sin 2 sin 0 ψ ψ N A AF (3.3-25) 其中N為天線陣列的個數,當ψ為零時(θ=90°,α=0°),若饋入天的的大小為均勻 分佈則AF為A 乘上N,當個數愈多主波束愈窄且旁波愈小,並且指向性很愈大,當天線0 間距d增加時,陣列天線之輻射場型包含愈多旁波束。當半徑k0d =2π 時,或 d=λ 時,Z
X
d
dsinθ
θ
θ
d
r
r-dsinθ r-2dsinθ
r-(N-1)dsinθ
0
1
2
N-1
皆為全向性天線(即G( θ ) =1),則陣列天線將包含三個主波束。如此功率會散往 三個方向,而無法集中所以在設計時,d<λ才不會兩個以上之主波束。 整個天線陣列可看成是一個天線,叫做“陣列天線"。此陣列天線的府輻射電場 大小可寫成
( )
θ 0( ) ( )
θ 0 ψ , G f r V N r E = (3.3-26) 0 sin 0 + = = θ α ψ k d (3.3-27) 因此理想上在天線的正上方是各個天線的增益相加,其場型的計算如下: 陣列天線的輻射場型=G( ) ( )
θ F0 θ =單一天線的輻射場型(G(θ))×陣列因數(
F0( )
θ)
3.3.7 錐線(Tapered line)能量分佈 我們知道饋入天線的能量不同時會使得旁束波程度(side-lobe level)和指向性 (Directivity)受到改變,例如使用二項式分佈,它的旁束波程度是最小,但是它的主 波束是最寬的,並且也指向性不好,要使用二項式分佈,功率分配是很大的考驗,功率 不易正確的分配。另外還有 Taylor 及 Tschebyscheff 等的分佈。第四章 模擬,實作與測量
4.1 振盪器模擬,實作與測量 此壓控振盪器主動元件是採用Philips BFG425W 的電晶體,它具有低雜訊、高增 益、 f = 25t GHz 。振盪器電路採取共集極方式,偏壓點選擇V = 3.5V ,CE I = 18mA ,c BE V = 0.9 。偏壓點的選擇會影響輸出功率與相位雜訊。變容二極體則使用SKYWORKS SMV1232-79LP,具有低串聯電阻、高電容值比的特性。 圖 4.1 壓控震盪器電路圖 Resonant Circuit圖 4.3 輸入阻抗之實部與虛部模擬圖 5.8GHz VCO Measurement 5700.0 5750.0 5800.0 5850.0 5900.0 5950.0 6000.0 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 VT(DC) F re que nc y( M H z) 圖 4.4 輸出頻率與電壓關係圖
圖 4.7 輸出 Harmonics 的量測圖 表 4.1 5.8GHz VCO Sensitivity Measurement
Frequency(MHz) VT(DC) Sensitivity(MHz) 5726.0 0.0 5743.5 0.5 30.0 5756.0 1.0 29.0 5772.5 1.5 32.5 5788.5 2.0 37.5 5810.0 2.5 38.0 5826.5 3.0 34.5 5844.5 3.5 44.0 5870.5 4.0 59.0 5903.5 4.5 53.5 5924.0 5.0
表 4.2 5.8GHz VCO Measurement Data
Item Test Condition Units Typ.
Output Power 5726~5924 MHz dBm 8.0
Phase Noise 100KHz Offset dBc/Hz -98.0
Harmonics RF Port dBc 33.0
Sensitivity @RF Port VT=2V MHz/V 38.0
4.2 混波器模擬,實作與測量
本論文所設計之雷達收發機此所採用的架構為收發獨立天線的設計,如此的設計 可以得到最好的接收與發射隔離度並省略昂貴的隔離元件(ex: circulator),及消除來自 本地振盪訊號的調幅雜訊。利用 Hybrid Mixer 來完成降頻動作(Down Conversion)。
圖 4.10 中頻量測圖
4.3 天線陣列模擬,實作與測量 本設計希望可以平貼於車體表面以避免影響外觀,因此在偵測方向上面會有別於一 般的縱向偵測而是斜向偵測,為了達到斜向偵測,此收發機所用的天線為天線陣列, 此種天線可以很容易得到高增益與斜向輻射的特性並可以以平面電路達成,使設計的 收發機可以平貼於車體下方,來偵測速度。 圖 4.11 天線陣列布局圖 圖 4.12 天線陣列實體電路圖 Units:mm PCB=FR4 Thickness=0.8mm
εr =4.7
tanσ=0.0245圖 4.13 天線陣列模擬圖
圖 4.15 反射損耗模擬與量測比較圖
圖 4.17 天線陣列加 Acry 實體圖
4.4 中頻放大器實作與測量 圖 4.19 中有正電壓轉負電壓電源電路,電源雜訊過大很容易就直接影響到電路 的效能而產生雜訊,尤其對於長距離的測距雷達系統而言,需要有能力偵測到遠方物 體回波的訊號而不要被電路的雜訊蓋過,為了降低電源雜訊,需將接地獨立,就可改 善如圖 4.20 所示。當電源電路供給的電流越大時,雜訊會越大,另外電壓也會略有所 下降,故在設計電源電路的供電量時,一般選用電路可輸出最大電流的 70~80%。在 負電源電路的設計中,由於負電源的整流電路都是利用電容切換來輸出負電壓,故輸 出電壓會隨著負載電流大小而衰減。 圖 4.20 中頻放大器電路圖 圖 4.21 DC 轉換量測圖
圖 4.22 中頻放大器實體電路圖 圖 4.23 中頻放大器輸入與輸出量測圖 a b c d a b c d
4.5 收發機整合及量測 5.8GHz 都卜勒雷達系統整合如圖 4.24 所示,將天線陣列的頻寬代入雷達方程 式,模擬偵測圖如圖 4.25 所示。可得知雷達的最大接收功率的角度為 (52°)。 C/L=14dB LPF Doppler Spectrum FFT 5.8GHz VCO O/P =8dBm IF Amplifiers IF- IF+ Hybrid Mixer 2dB ATT 3dB
DSP
Gain=8dBi Main Beam=50 Antenna Array fo fo fd MCU Display 圖 4.24 5.8GHz 都卜勒雷達架構圖 θ=90° RADAR Main Beam θ=0° Pr Max 圖 4.25 5.8GHz 都卜勒雷達訊號分布圖圖 4.26 5.8GHz 都卜勒雷達模擬接收功率圖
4.5.1 Spectrum 量測 將雷達系統實際裝於車底部,如圖 4.25 所示。 圖 4.27 Spectrum量測架設圖 (a). V=10(km/hr) (b). V=20(km/hr) RF Module 12VDC to 110VAC Scope Battery Signal line 12VDC Line
(c). V=30(km/hr) (d). V=40(km/hr)
(e). V=50(km/hr) (f). V=60(km/hr)
(i). V=90(km/hr) (j). V=100(km/hr)
(k). V=110(km/hr) (l). V=120(km/hr)
6.2.2 DSP 量測 圖 4.29 DSP量測架設圖 (a).V=0(km/hr) (b).V=10(km/hr) DSP Computer fd X40Hz fd X40Hz
(c).V=20(km/hr) (d).V=30(km/hr) (e).V=40(km/hr) fd X40Hz fd X40Hz fd X40Hz
(f).V=50(km/hr) (g).V=60(km/hr) (h).V=70(km/hr) fd X40Hz fd X40Hz fd X40Hz
(i).V=80(km/hr) (j).V=90(km/hr) (k).V=100(km/hr) fd X40Hz fd X40Hz fd X40Hz
(l).V=110(km/hr) (m).V=120(km/hr) (n).V=80 遇路面接縫 圖 4.30 DSP量測圖 fd X40Hz fd X40Hz fd X40Hz
6.2.3 Spectrum 與 DSP 量測比較 利用 Spectrum 與 DSP 所量測出的值做比較,當車速 50(km/hr) 如圖 4.31 和圖 4.32 所示,得知都卜勒頻率f ,就可求出移動速度 v。 d 圖 4.31 Spectrum量測圖 圖 4.32 DSP量測圖 ) / ( 67 . 46 ) / ( 1000 3600 * 96 . 12 ) / ( 96 . 12 ) 52 (sin 10 * 8 . 5 * 2 10 * 3 * 395 * 2 * 1 9 8 1
)
(sin
hr km hr km s m fo c fd v = = = ° = = − −θ
(
) / ( 26 . 47 ) / ( 1000 3600 * 13 . 13 ) / ( 13 . 13 ) 52 (sin 10 * 8 . 5 * 2 10 * 3 * 400 * 2 * 1 9 8 1)
sin
hr km hr km s m fo c fd v = = = ° = = − −θ
fd X40Hz實例A. 雷達方程式
( )
3 4 2 2 4 R G P P t r π σ λ = 其中發射功率 Pt=3 dBm=0.001995262 W, 天線增益G=7.843627 dBi = 10 843627 . 7 10 = 6.08643, 波長(
)
m Hz s m f c o 0517 . 0 ) ( 10 * 8 . 5 / 10 * 3 9 8 = = = λ , 雷達截面積 σ (m ), 2 雷達和地面距離R
0
.
2538
m
sin
2
.
0
=
=
θ
,(車和地面距離 = 0.2m ,θ=52° ) 所以得知Pr =0.00002399 W= -16.1991 dBm ,(Pr Max) 實例B. 都卜勒方程式 c vf f o d 2 = Î o df
c
f
v
2
=
當車速 50(km/hr) 情況下用 DSP 求得 f =400Hz,而 Pr Max (θ=52°),代入都卜勒方程d 式求得v ,(
km hr)
v *3.6 47.28 / sin * 10 * 8 . 5 * 2 10 * 3 * 400 9 8 = = θ第五章 結論
本論文研製一個
5.8GHz
都卜勒雷達系統的前端電路。包括
5.8GHz
壓控振盪器,輸出功率等於
8dBm
,相位雜訊為
-98dBc/Hz @100KHz
、
混波器的
(Total Loss)
為
15dB
、天線陣列的天線增益為
8dBi
,傾斜角度為
50
度,半功率波束為
40
度、中頻放大器將
(Phase Difference of 180°)
成功
轉換為單一訊號輸出,且將訊號箝位到時
(1.6V)
等,來完成此雷達系統,
最後用示波器和數位訊號處理器
(DSP)
,來偵測此收發機的特性,可以清
楚的接收到目標物所反彈回的都卜勒信號。
此雷達系統未來努力方向,是將天線陣列的半功率波束變窄、及將基
頻訊號轉換於顯示面板上,讓駕駛人得知正確速度。
參考文獻
[1] 內政部警政署國道公路警察局,http://www.hpb.gov.tw/fox/front/bin/home.phtml。 [2] 陳信全,24GHz 連續波雷達系統設計與整合,國立交通大學,碩士論文,2004. [3] 昌任為,具辨識車輛方向功能之都卜勒雷達收發機,國立交通大學,碩士論文, 2006. [4] 鄭光甫,77GHz 車用防撞雷達系統,國立交通大學,碩士論文,2007. [5] 黃泓偉,24GHz 頻率調變連續波雷達系統之前端電路設計與整合,國立交通大學, 碩士論文,2007. [6] 陳諭正,6GHz 縮小化頻率調變連續波雷達系統,國立交通大學,碩士論文,2007. [7] 賴浩宇,24-GHz 車輛前視防撞警示雷達之單脈衝透鏡天線系統設計與驗證,國立 交通大學,碩士論文,2009. [8] 許少華,24-GHz 連續調頻單脈衝技術之雷達前端電路設計與整合,國立交通大學, 碩士論文,2009. [9] 朱耀衣 譯,張去疑 校,雷達基本原理,徐氏基金會出版,民國77年. [10] 向敬成,張明友 譯,雷達系統,五南圖書,民國93年.[11] D. M. Pozar, Microwave Engineering, New York: John Wiley & Sons, 2nd Ed. ,pp.672-679,1998
[12] Bassem R. Mahafza,Ph.D, Radar system analysis and design using Matlab, Chapman & Hall/CRC ,2000
[13] T-H Ho; S-J Chung; , "Design and Measurement of a Doppler Radar With New Quadrature Hybrid Mixer for Vehicle Applications," Microwave Theory and Techniques, IEEE Transactions on , vol.58, no.1, pp.1-8, Jan. 2010.
[14] T-H Ho; S-J Chung; , "A compact 24 GHz radar sensor for vehicle sideway-looking applications," Microwave Conference, 2005 European , vol.3, no., pp. 4 pp., 4-6 Oct. 2005.
[15] S-G Kim; Hyun Kim; Yongshik Lee; Il-Suek Kho; Jong-Gwan Yook; , "5.8 GHz Vital Signal Sensing Doppler radar using Isolation-improved Branch-line Coupler," Radar Conference, 2006. EuRAD 2006. 3rd European , vol., no., pp.249-252, 13-15 Sept.
2006.
[16] Descamps, P.; Vindevoghel, J.; Bouazza, F.; Sawsan, S.; , "Microwave Doppler sensors for terrestrial transportation applications," Vehicular Technology, IEEE Transactions on ,
vol.46, no.1, pp.220-228, Feb 1997.
[17] Placentino, F.; Alimenti, F.; Battistini, A.; Bernardini, W.; Mezzanotte, P.; Palazzari, V.; Leone, S.; Scarponi, A.; Porzi, N.; Comez, M.; Roselli, L.; , "Measurements of length and velocity of vehicles with a low cost sensor radar Doppler operating at 24GHz,"
Advances in Sensors and Interface, 2007. IWASI 2007. 2nd International Workshop on ,
vol., no., pp.1-5, 26-27 June 2007.
[18] Alimenti, F.; Placentino, F.; Battistini, A.; Tasselli, G.; Bernardini, W.; Mezzanotte, P.; Rascio, D.; Palazzari, V.; Leone, S.; Scarponi, A.; Porzi, N.; Comez, M.; Roselli, L.; , "A low-cost 24GHz doppler radar sensor for traffic monitoring implemented in standard discrete-component technology," Radar Conference, 2007. EuRAD 2007. European ,
vol., no., pp.162-165, 10-12 Oct. 2007.
[19] Lhomme-Desages, D.; Grand, C.; Guinot, J.-C.; Ben Amar, F.; , "Doppler-Based Ground Speed Sensor Fusion and Slip Control for a Wheeled Rover," Mechatronics, IEEE/ASME Transactions on , vol.14, no.4, pp.484-492, Aug. 2009.
[20] Kleinhempel, W.; Bergmann, D.; Stammler, W.; , "Speed measure of vehicles with on-board Doppler radar," Radar 92. International Conference , vol., no., pp.284-287,
12-13 Oct 1992.
[21] Guillermo Gonzalez ,Microwave Transistor Amplifiers Analysis and Design, Pearson Education Taiwan Ltd,2008.
[22] Jayanta Mukherjee; Roblin, P.; Akhtar, S.; , "An Analytic Circuit-Based Model for White and Flicker Phase Noise in LC Oscillators," Circuits and Systems I: Regular Papers, IEEE Transactions on , vol.54, no.7, pp.1584-1598, July 2007.
[23] 袁帝文;王岳華,高頻通訊電路設計,高立圖書有限公司,pp.434-436,民 89 年.
[24] C-J HSU1 and M-WEIHSU,” Design and Implementation of Two Single-Balanced Mixer for a Bluetooth Transceiver”, Journal of Science and Engineering Technology, Vol. 1, No. 2, pp. 43-46 ,2005.
[25] P-S Wu; C-H Wang; T-W Huang; Huei Wang; , "Compact and broad-band millimeter-wave monolithic transformer balanced mixers," Microwave Theory and Techniques, IEEE Transactions on , vol.53, no.10, pp. 3106- 3114, Oct. 2005.
[26] M-L Her; P-F Teo; F-H Kung; C-Y Xie; Y-Z Wang; Y-C Chiou; Y-L Wang; C-W Kuo; , "Design and analysis for three applications of 90-degree single balanced mixer,"
Communication Systems, 2002. ICCS 2002. The 8th International Conference on , vol.1,
no., pp. 25- 28 vol.1, 25-28 Nov. 2002.
[27] 鍾世忠,無線通訊天線設計,課程講義,民國97年.
[28] 劉彥志,串列饋入式陣列天線之研製,國立交通大學,碩士論文,2007.
[29] C. A. Balanis, Antenna Theory Analysis and Design,John Wiley & Sons, 2005.
[30] Warren L.Stutzman,Gary A.Thiele,Antenna theory and design,2nd ed, John Wiley & Sons, 1998.
[31] Randy L.Haupt,Antenna arrays, John Wiley & Sons, 2010.
[32] Liebig, T.; Rennings, A.; Otto, S.; Caloz, C.; Erni, D.; , "Comparison between CRLH zeroth-order antenna and series-fed microstrip patch array antenna," Antennas and Propagation, 2009. EuCAP 2009. 3rd European Conference on , vol., no., pp.529-532,
23-27 March 2009.
[33] Chen, Z.; Otto, S.; , "A taper optimization for pattern synthesis of microstrip series-fed patch array antennas," Wireless Technology Conference, 2009. EuWIT 2009. European ,
[34] Otto, S.; Rennings, A.; Litschke, O.; Solbach, K.; , "A dual-frequency series-fed patch array antenna," Antennas and Propagation, 2009. EuCAP 2009. 3rd European Conference on , vol., no., pp.1171-1175, 23-27 March 2009.
[35] Tao Yuan; Ning Yuan; Le-Wei Li; , "A Novel Series-Fed Taper Antenna Array Design,"
Antennas and Wireless Propagation Letters, IEEE , vol.7, no., pp.362-365, 2008.
[36] Wincza, K.; Gruszczynski, S.; , "Four-element series-fed antenna subarray for high-frequency antenna applications," Microwave Conference, 2007. APMC 2007. Asia-Pacific , vol., no., pp.1-4, 11-14 Dec. 2007.
[37] Freese, J.; Jakoby, R.; Blocher, H.-L.; Wenger, J.; , "Synthesis of microstrip series-fed patch arrays for 77 GHz-sensor applications," Microwave Conference, 2000 Asia-Pacific ,
vol., no., pp.29-33, 2000.
[38] Babas, D.G.; Sahalos, J.N.; , "Synthesis method of series-fed microstrip antenna arrays,"
![圖 3.5 平衡式混波器電路訊號分析 3.3 天線陣列原理[27-38] 3.3.1 傳輸線模型 對於矩形的貼片天線(Patch Antenna)最簡單的分析方式是使用傳輸線理論,將貼 片天線視為兩條平行且具有輻射能力的槽孔。換言之,矩形的貼片天線是依靠兩邊的 漏電場輻射,如圖 3.6 ;而漏電場會影響貼片天線的長度,因此半波長的貼片天線長 度一般會略小於介質基板中的半波長。在傳輸線模型的分析中,可將矩形貼片天線視 為一段長度為半波長,且端點為開路的傳輸線。 W XYZL hPatchSubstra](https://thumb-ap.123doks.com/thumbv2/9libinfo/7494780.115727/26.892.232.716.111.370/最簡單形的是依靠兩邊的漏電場輻射如度一般會略為一段長為開路.webp)