國立交通大學
電控工程研究所
碩 士 論 文
動態電壓補償器控制系統的設計與模擬
Control System Design and Simulation of Dynamic Voltage
Restorer
研 究 生 : 呂紹安
指 導 教 授 : 林清安 教授
動態電壓補償器控制系統的設計與模擬
Control System Design and Simulation of Dynamic Voltage
Restorer
研 究 生:呂紹安 Student: Shao-An Lu
指導教授:林清安 Advisor: Dr. Ching-An Lin
國 立 交 通 大 學
電控工程研究所
碩 士 論 文
A Thesis
Submitted to Institute of Electrical and Control Engineering College of Electrical and Computer Engineering
National Chiao Tung University In Partial Fulfillment of the Requirements
For the Degree of Master In
Electrical and Control Engineering July 2013
Hsinchu, Taiwan, Republic of China
i
動態電壓補償器控制系統的設計與模擬
學生:呂紹安
指導教授:林清安 教授
國立交通大學電控工程研究所
中文摘要
本論文探討動態電壓補償器(dynamic voltage restorer)使用若干種
線性控制以及非線性控制時,對於電壓驟降的補償效果。為了改善現
有控制方式的響應速度以及控制精度,本論文在線性控制的部分設計
了帶積分的
LQR 狀態回授控制;在非線性控制的部分則使用時變順
滑面的順滑模態控制(sliding mode control),並且設計了時變順滑面變
化的規則。最後透過數值模擬的方式與現有的控制系統比較,證明所
提出的兩種控制系統應用於動態電壓補償器,在面對不同型式電壓驟
降時皆有不錯的補償效果。
ii
Control System Design and Simulation of
Dynamic Voltage Restorer
Student: Shao-An Lu
Advisor: Dr. Ching-An Lin
Institute of Electrical and Control Engineering
National Chiao Tung University
ABSTRACT
In this thesis, the performance of a dynamic voltage restorer against
voltage dips using several control systems, including linear and nonlinear
control, is studied. Two methods are proposed to improve the system
tracking ability compared to traditional PI control and sliding mode
control. The first method designs a state feedback controller through LQR
multivariable control techniques to enhance steady state accuracy. The
second method designs a sliding mode controller using a time-varying
sliding surface in order to reduce the total harmonic distortion in the
sensitive load side. The time-varying sliding surface can be determined
by introducing boundary control and some other design principles.
Comparisons between the above mentioned control techniques are
investigated through computer simulations. It is shown that the proposed
methods provide either faster response or higher compensation accuracy.
Simulation results under symmetrical and unsymmetrical voltage dip are
also presented.
iii
致
謝
首先要感謝的就屬指導教授林清安老師了,由於老師耐心的指導,不斷引導 我如何發現並解決問題,每每一針見血地指出我在研究上不嚴謹之處,本論文才 得以順利完成。老師對於學術研究一絲不苟的態度以及對真理的堅持為我樹立了 最佳典範,而我亦期許自己在未來面對挑戰時能像老師一樣認真與專業,哪怕, 只是老師的萬分不及一,也定能有所收穫。 同時我亦感謝論文口試委員交大電控所陳鴻祺副教授以及鄧清政教授對本 論文提供寶貴的建議以及指導,使本論文更臻完備。此外,碩二期間修習陳永平 教授的可變結構控制與林清安教授的最佳控制課程亦對我尋找論文靈感提供了 莫大的助益,感謝陳永平教授與林清安教授。 感謝這兩年實驗室的同學們,感謝建賢學長、國展學長、逸棋學長;感謝建 宏、宣銘、仲佑、岳澧、俊裕以及言璋;感謝交大桌球隊的隊友們,你們讓我的 研究所生活更加充實且愉快。 最後,我還要感謝我的家人,感謝你們的支持與鼓勵,讓我能夠全力投入完 成論文和拿到學位,再次感謝你們的關心與照顧。iv
目錄
中文摘要... i ABSTRACT ... ii 0H 目錄... 160Hiv 1H 圖目錄... 161Hvii 2H 表目錄... 162Hxi 3H 第一章 緒論... 163H1 4H 第二章 基礎理論與數學模式之建立... 164H3 5H 2.1 靜止座標下DVR的狀態方程式 ... 165H3 6H 2.2 派克轉換(Park’s transform) ... 166H4 7H 2.3 同步旋轉座標下DVR的狀態方程式 ... 167H5 8H 2.4 對稱成分法與鎖相迴路... 168H7 9H 2.4.1 對稱成分法(symmetrical components) ... 169H7 10H 2.4.2 鎖相迴路與正負相序之擷取方式... 170H10 11H 2.5 動態電壓補償器的補償策略... 171H16 12H 第三章 動態電壓補償器之線性控制... 172H19 13H 3.1 對稱電壓驟降下DVR的線性控制 ... 173H19 14H 3.2 不對稱電壓驟降下DVR的線性控制 ... 174H22 15H 3.2.1 基於正負相序擷取的雙同步旋轉座標PI控制 ... 175H23 16H 3.2.2 同步旋轉座標下的解耦PI+R控制 ... 176H26 17H 3.3 DVR使用LQR狀態回授控制 ... 177H31 18H 3.3.1 帶有積分控制的狀態回授... 178H31v 19H 3.3.2 LQR狀態回授的追蹤控制... 179H32 20H 3.4 模擬與分析... 180H36 21H 3.4.1 電壓驟降時DVR系統的模擬 ... 181H36 22H 3.4.2 DVR系統穩健性(robustness)的模擬... 182H46 23H 3.5 討論... 183H48 24H 第四章 動態電壓補償器之可變結構控制... 184H51 25H 4.1 單相DVR的數學模型 ... 185H51 26H 4.2 DVR使用傳統順滑模態控制 ... 186H52 27H 4.2.1 控制輸入設計... 187H52 28H 4.2.2 理想控制輸入u 的修正 ... ctrl 188H54 29H 4.2.3 改變 k 值對順滑模態存在區域的影響 ... 189H54 30H 4.2.4 傳統順滑模態控制所遭遇的問題... 190H57 31H 4.3 DVR使用二階切換面的邊界控制 ... 191H58 32H 4.4 DVR使用時變順滑面的順滑模態控制 ... 192H62 33H 4.4.1 使用時變順滑面時理想控制輸入的設計... 193H63 34H 4.4.2 時變順滑函數的設計... 194H63 35H 第五章 模擬與討論... 195H67 36H 5.1 模擬環境與系統架構... 196H67 37H 5.2 DVR對於電壓驟降補償的模擬 ... 197H69 38H 5.2.1 電壓驟降時DVR系統的模擬 ... 198H70 39H 5.2.2 DVR系統穩健性的模擬 ... 199H75 40H 5.3 討論... 200H76 41H 第六章 結論... 201H80
vi
42H
vii
圖目錄
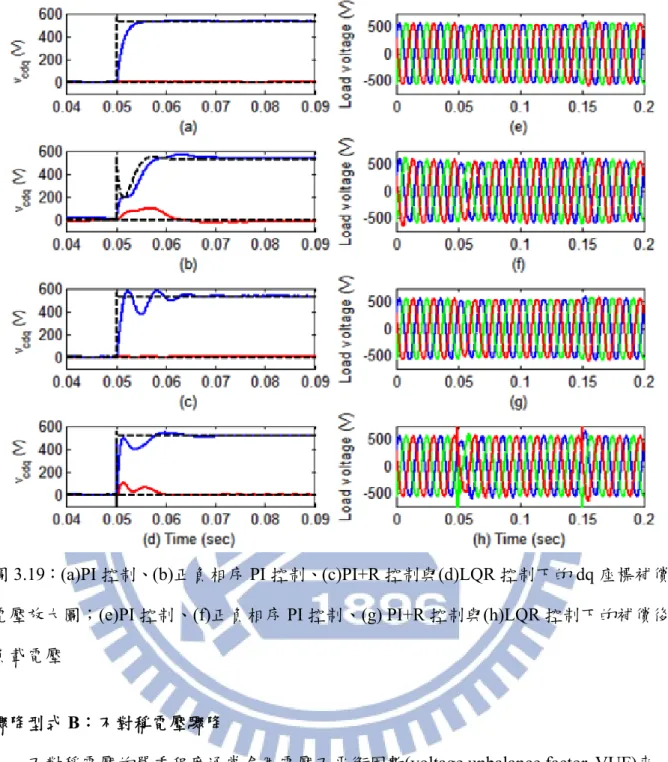
圖2.1:DVR 單相電路架構示意圖 ... 3 圖2.2:abc 三相靜止座標、αβ兩相靜止座標與dq 同步旋轉座標的空間關係 ... 5 圖2.3:三相電壓的相量圖... 10 圖2.4:典型的鎖相迴路系統方塊圖... 10 圖2.5:解耦型雙 dq 座標鎖相迴路之方塊圖... 12 圖2.6:解耦型雙 dq 座標鎖相迴路中各向量的位置關係圖... 13 圖2.7:延遲訊號消除法系統方塊圖... 14 圖2.8:延遲訊號擷取法之範例... 15 圖2.9:帶阻濾波器擷取法系統方塊圖... 16 圖2.10:驟降前補償策略的相量圖... 17 圖2.11:同相位補償策略的相量圖 ... 17 圖2.12:最佳化能量補償策略的相量圖... 18 圖3.1:DVR 的開迴路系統方塊圖 ... 20 圖3.2:同步旋轉座標下 DVR 雙迴路控制的系統方塊圖 ... 20 圖3.3:DVR 使用同步旋轉座標下解耦雙迴路 PI 控制的開迴路波德圖... 22 圖3.4:DVR 使用同步旋轉座標下解耦雙迴路 PI 控制的閉迴路步階響應... 22 圖3.5:正負相序擷取的雙同步旋轉座標 PI 控制系統方塊示意圖 ... 24 圖3.6:系統G+−PI( )s 的極零點配置圖 ... 25 圖3.7:使用正負序擷取的雙同步旋轉座標 PI 控制(藍色實線)與單同步旋轉座標 PI 控制(紅色實線)的步階響應 ... 25 圖3.8:系統G+−PI( )s 對於帶有兩倍基頻訊號的步階訊號的暫態響應 ... 26 圖3.9:理想諧振控制器的波德圖(ω0 =120π ,K =1) ... 26 圖3.10:修正後的諧振控制器之波德圖(ω0 =120π ,KR =20) ... 27viii 圖3.11:DVR 使用同步旋轉座標下 PI+R 控制的系統方塊圖 ... 28 圖3.12: x 、y、 f x y 與( , ) K 的關係 ... 29 PR 圖3.13:DVR 使用 PI+R 控制下K 與閉迴路步階響應的關係 ... 30 PR 圖3.14:DVR 使用 PI+R 控制下K 與閉迴路系統波德圖的關係 ... 30 PR 圖3.15:使用同步旋轉座標下的 PI+R 控制(藍色實線)、正負序擷取的 PI 控制(紅 色實線)與單同步旋轉座標 PI 控制(綠色實線)的閉迴路步階響應 ... 30 圖3.16:Q 矩陣的參數與(a)誤差安定時間(b)最大超越量(c)負載電壓 THD 的關係 (q3 =q4 = ) ... 35 1 圖3.17:電網發生瞬間驟降深度 90%的對稱電壓驟降 ... 37 圖3.18:(a)PI 控制、(b)正負相序 PI 控制、(c)PI+R 控制與(d)LQR 控制下的三相 補償電壓;(e)PI 控制、(f)正負相序 PI 控制、(g) PI+R 控制與(h)LQR 控 制下的dq 座標補償電壓(藍色與紅色實線)與補償電壓的參考值(黑色虛 線) ... 38 圖3.19:(a)PI 控制、(b)正負相序 PI 控制、(c)PI+R 控制與(d)LQR 控制下的 dq 座標補償電壓放大圖;(e)PI 控制、(f)正負相序 PI 控制、(g) PI+R 控制 與(h)LQR 控制下的補償後負載電壓 ... 39 圖3.20:不對稱電壓驟降,穩態 VUF 8.7%= ... 40 圖3.21:(a)PI 控制、(b)正負相序 PI 控制、(c)PI+R 控制與(d)LQR 控制下的 dq 座標補償電壓(藍色與紅色實線)與補償電壓的參考值(黑色虛線);(e)PI 控制、(f)正負相序 PI 控制、(g) PI+R 控制與(h)LQR 控制下的 dq 座標 補償電壓放大圖 ... 41 圖3.22:(a)PI 控制、(b)正負相序 PI 控制、(c)PI+R 控制與(d)LQR 控制下的補償 後負載電壓與其參考值的誤差;(e)PI 控制、(f)正負相序 PI 控制、(g) PI+R 控制與(h)LQR 控制下的補償後負載電壓 ... 42 圖3.23:不對稱且帶有諧波失真的電壓驟降... 43
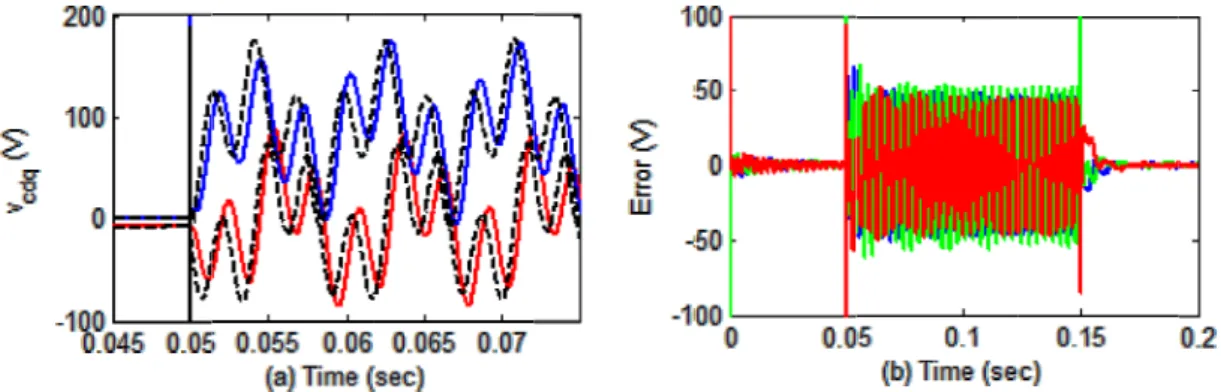
ix 圖3.24:正負相序 PI 控制下(a)dq 座標補償電壓放大圖與(b)補償後負載電壓與其 參考值之誤差 ... 44 圖3.25; PI+R 控制控制下(a) dq 座標補償電壓放大圖與(b)補償後負載電壓與其 參考值之誤差 ... 44 圖3.26:LQR 控制控制下(a) dq 座標補償電壓放大圖與(b)補償後負載電壓與其參 考值之誤差 ... 45 圖3.27:正負相序 PI 控制下(a)補償後負載電壓放大圖與(b) 補償後負載電壓的 FFT 分析 ... 45 圖3.28:PI+R 控制下(a)補償後負載電壓放大圖與(b)補償後負載電壓的 FFT 分析 ... 45 圖3.29:LQR 控制下(a)補償後負載電壓放大圖與(b)補償後負載電壓的 FFT 分析 ... 46 圖3.30: DVR 使用(a)正負相序 PI 控制、(b)PI+R 控制與(c)LQR 控制下,補償 後的a 相負載電壓以及負載電壓之參考值 ... 47 圖3.31:(a)正負相序 PI 控制、(b)PI+R 控制與(c)LQR 控制下負載電壓與其參考 值的誤差;參數值改變後(d)正負相序 PI 控制、(e)PI+R 控制與(f)LQR 控制下負載電壓與其參考值的誤差 ... 47 圖4.1:參數 k 與順滑函數s之關係 ... 55 圖4.2:不同 k 值下順滑模態的存在區域,使用(a)大 k 值與(b)小 k 值 ... 57 圖4.3:簡化的單相 DVR 電路圖 ... 61 圖4.4:補償電壓、電感電流與電容電流之波形示意圖... 61 圖4.5:二階切換面s 與順滑模態存在區域的示意圖 ... 62 2 圖4.6:時變順滑函數參數 ( )k t 控制之流程圖 ... 65 圖4.7:時變順滑面與系統軌跡的關係... 66 圖4.8:時變順滑面的順滑模態控制系統方塊圖... 66
x 圖5.1:DVR 模擬使用的電力系統架構 ... 67 圖5.2:DVR 模擬的電路架構 ... 68 圖5.3:電網發生瞬間驟降深度 80%的對稱電壓驟降 ... 70 圖5.4:驟降型式 A 時的 a 相的相軌跡 ... 71 圖5.5:驟降型式 A 時 a 相的理想控制輸入u ... 72 ctrl 圖5.6:驟降型式 A 時系統 a 相追蹤誤差的放大圖 ... 72 圖5.7:驟降型式 A 時系統 a 相追蹤誤差 ... 72 圖5.8:電網發生 VUF=7.14%的不對稱電壓驟降 ... 72 圖5.9:驟降型式 B 時 a 相的理想控制輸入u ... 73 ctrl 圖5.10:驟降型式 B 時系統 a 相追蹤誤差 ... 73 圖5.11:電網發生不對稱且帶有諧波汙染的電壓驟降 ... 74 圖5.12:驟降型式 C 時 a 相的理想控制輸入u ... 74 ctrl 圖5.13:驟降型式 C 時系統 a 相追蹤誤差 ... 75 圖5.14:驟降型式 A 且系統參數發生變化時 a 相追蹤誤差 ... 76 圖5.15:電壓驟降深度與(a)負載電壓 THD(b)系統狀態e 安定時間的關係 ... 77
xi
表目錄
107H 表3.1:DVR使用同步旋轉座標下解耦雙迴路PI控制的系統參數... 267H21 108H 表3.2:二階帶阻濾波器參數... 268H24 109H 表3.3:不同 Q 矩陣參數對系統響應的影響 ... 269H35 110H 表3.4:DVR系統模擬的電路參數 ... 270H36 111H 表3.5:基頻訊號與常見諧波的相位關係與旋轉方向... 271H43 112H 表3.6:自 0.06 秒起五個週期內a相負載電壓的THD... 272H46 113H 表3.7:線性控制器的比較... 273H50 114H 表5.1:DVR系統模擬時的電路參數 ... 274H68 115H 表5.2:DVR系統模擬時的控制器參數 ... 275H70 116H 表5.3:不同控制系統在不同驟降型式下的負載電壓THD ... 276H77 117H 表5.4:LQR控制、傳統順滑模態控制、邊界控制以及時變順滑面的順滑模態控 制四種控制器表現的比較 ... 277H791
第一章
1.
緒論
電壓驟降是電力系統中最常見的故障型式,根據IEEE之標準[118H1],電壓驟降指的是 電壓降低至方均根值90%以下、10%以上,並持續半個週期至一分鐘不等的情況。造成 電壓驟降的原因有很多,包括雷擊、大型電機的起動、輸配電設備故障等,這些電網不 平衡的問題在經濟發展以及產業競爭力中扮演著舉足輕重的角色。舉高科技產業為例, 生產設備與機台往往使用許多精密電子元件,這些電子元件對於電壓中的雜訊或者干擾 相當敏感,電壓驟降的發生很可能使設備發生異常,導致生產線停擺而造成巨額經濟損 失;此外,電壓驟降的問題對於能源科技產業來說也是不容忽視的,例如風力發電中廣 為使用的雙饋式感應風力電機(doubly fed induction generator, DFIG),此發電機對於電壓 波動帶來的大電流相當敏感,嚴重的電壓驟降可能會使風機跳脫電網,造成大範圍供電 不穩而釀災,也因此風電廠往往要求風機俱備一定的低壓穿越(low voltage ride through, LVRT)能力,來維持機組在電網故障時的持續運作,避免發電機跳脫電網的情形發生。 總而言之,電壓驟降對高科技產業來說已是日漸重要的課題,為了避免不必要的經濟損 失,勢必要提高供電系統的可靠度及穩定性,並設法降低電壓驟降帶來的影響。實際上,電力調節元件(power conditioner)的設置最能有效地解決電壓驟降問題,常 見的電力調節元件有不斷電系統(UPS)、靜態同步補償器(STATCOM)以及動態電壓補償 器(dynamic voltage restorer, DVR)等,其中DVR相較於UPS以及STATCOM,其成本較為 低廉,因此DVR最適合用來改善電壓驟降問題,可有效避免各種敏感負載(sensitive load) 因 電 網 電 壓 不 穩 定 造 成 的 跳 脫(tripping) 問 題 [119H2] 。 DVR 首 次 被 使 用 是 由 西 屋 電 子 (Westinghouse Electric)安裝於南卡羅來納州,目的在保護一間自動紡織工廠不受電網故 障的干擾[120H3]。其後DVR陸陸續續被使用於保護各種敏感負載,有關DVR系統的各種研 究以及改進方式亦不斷被提出。 在DVR控制系統的研究方面,傳統PI控制應用是最多的,例如論文[121H4]在PI控制系統
2 中加入正回授,企圖縮短暫態響應時間。論文[122H5]以PI控制為基礎,將PI控制器加上諧振 控制器,提高DVR對高階諧波的補償能力。論文[124H6]提出一種在同步旋轉座標下的PI解耦 控制,使用雙閉回路架構將d軸與q軸的耦合項消除,達成更精確與快速的控制。論文[125H7] 以同步旋轉座標下的PI解耦合控制為基礎,將系統分成正相序與負相序來作補償,讓 DVR在不對稱電壓驟降下有較佳的補償表現。除PI控制外,各種線性與非線性的控制理 論亦被應用於DVR系統。論文[126H8]以重複控制(repetitive control)的方式來讓DVR完成電壓 驟降以及諧波汙染的補償;論文[127H9]以H∞控制器提高系統的穩健性,讓DVR即使在系統 參數發生變動的情況下,依然有良好的補償表現;論文[128H10]以順滑模態(sliding mode)控 制器完成單相DVR的控制;論文[129H11]以順滑模態控制器完成三相DVR在對稱與不對稱電 壓驟降下的模擬,並表示順滑模態控制器能夠使DVR良好地補償各種電壓驟降,且補償 後的負載電壓其總和諧波失真(total harmonic distortion, THD)亦符合IEEE之標準。
本論文第二章介紹同步旋轉座標的轉換以及並建立 DVR 的數學模型,第三章先介 紹同步旋轉座標下的解耦PI 與 PI+R 控制方式,其後以 LQR 方法設計了一種狀態回授 控制器,並透過模擬來分析比較LQR 控制器、PI 與 PI+R 控制器之優劣,第四章介紹靜 止三相座標下DVR 的順滑模態控制設計,說明傳統順滑模態控制用在 DVR 可能遇到的 問題,並利用邊界控制中引入的二階切換面來設計一種時變的順滑面,能夠改善傳統順 滑模太的缺點並且達成快速響應以及穩健控制,第五章使用 MATLAB 及 PSIM 數值軟 體模擬了若干控制器在不同電壓驟降情況下的補償表現,第六章為結論。
3
第二章
2.
基礎理論與數學模型之建立
2.1 靜止座標下 DVR 的狀態方程式
DVR的電路架構如 278H圖 2.1 所示,包含了PWM反流器、儲能元件(直流電壓源)、LC 低通濾波器以及串聯式變壓器。當電壓驟降發生時,DVR控制系統命令PWM反流器產 生適當電壓訊號,透過串聯式變壓器饋送此補償電壓至電網端,使負載端的電壓維持恆 定。LC低通濾波器的作用在於濾除PWM反流器產生的諧波,降低電力電子元件對電網 電壓造成的汙染。 dc V f i f L f C c v g i Sensitive load g v GridVoltage dip Injected voltage Restored voltage
f V 圖2.1:DVR 單相電路架構示意圖 根據279H圖2.1,並選擇v 與c if 當作狀態變數,則DVR系統單相的狀態方程式可寫成 1 0 0 1 1 1 0 0 f c c f f g f f f f C v v C v i i i L L ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ − ⎡ ⎤ ⎢ ⎥⎡ ⎤ ⎢ ⎥ ⎢ ⎥ = + + ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢− ⎥⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎢ ⎥ ⎣ ⎦ & & (2.1)
4
其中v 為DVR之補償電壓,c Cf 與Lf為濾波器之電容值與電感值,if為流過濾波器電感
之電流,ig為電網電流,V 為直流電壓源之電壓,dc vf 為PWM之輸出電壓。考慮DVR運
行於三相電力系統中,以vcabc、ifabc表示abc三相補償電壓以及三相電感電流,則280H(2.1)式
經過修改可得DVR三相之狀態方程式如下 1 1 1 1 f f f f C C L L × × × × ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ − ⎡ ⎤ ⎢ ⎥⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢− ⎥⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎢ ⎥ ⎣ ⎦ 3 3 3 3 3 3 3 3 3 3 3 3 0 I 0 I I I 0 0 cabc cabc fabc gabc fabc fabc v v = + v + i i i & & (2.2) 其中 ca cb cc v v v ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ cabc v , fa fb fc i i i ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ fabc i , 1 0 0 0 1 0 0 0 1 ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 3 I , 0 0 0 0 0 0 0 0 0 × ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 3 3 0 以及 fa fb fc v v v ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ fabc v
2.2 派克轉換(Park’s transform)
在電力系統中,除了三相靜止座標,通常會利用派克轉換將狀態變數轉換到 dq 旋 轉座標上。透過派克轉換,原本平衡的三相訊號在旋轉座標上將成為兩相的直流訊號, 大大簡化了計算與分析的難度。派克轉換的轉換矩陣是由兩個轉換系統所構成,第一個 轉換系統係由abc 靜止三相座標轉至αβγ 靜止座標的投影矩陣,其轉換關係式為 1 1/ 2 1/ 2 2 0 3 / 2 3 / 2 3 1/ 2 1/ 2 1/ 2 − − ⎡ ⎤ ⎢ ⎥ = ⎢ − ⎥ ⎢ ⎥ ⎣ ⎦ abc/αβ T (2.3) 一般來說,γ 軸分量為 0,因此習慣將轉換後的座標稱作αβ座標。第二個轉換系統係由 αβ座標轉至dq0 同步旋轉座標的旋轉矩陣,此旋轉矩陣如下5 cos sin 0 sin cos 0 0 0 1 θ θ θ θ ⎡ ⎤ ⎢ ⎥ = −⎢ ⎥ ⎢ ⎥ ⎣ ⎦ αβ/dq T (2.4) 其中θ表示座標旋轉角度,通常θ會選擇為電網電壓之相位,使得座標旋轉速度與電網 電壓轉速相同,是故轉換後的座標稱作同步旋轉座標。同樣地,轉換後0 軸分量皆為零, 因此將轉換後的座標稱作dq 座標。 根據281H(2.3)式與282H(2.4)式,可求得由abc三相靜止座標轉至dq同步旋轉座標的轉換矩陣如 下
cos cos( 2 / 3) cos( 2 / 3)
2
sin sin( 2 / 3) sin( 2 / 3)
3 1 / 2 1 / 2 1 / 2 θ θ π θ π θ θ π θ π − + ⎡ ⎤ ⎢ ⎥ = = ⎢− − − − + ⎥ ⎢ ⎥ ⎣ ⎦ abc/ dq αβ / dq abc/ αβ T T T (2.5) 或者忽略零軸分量,將轉換矩陣寫成 3 / 2
cos cos( 2 / 3) cos( 2 / 3)
2
sin sin( 2 / 3) sin( 2 / 3)
3 s r θ θ π θ π θ θ π θ π − + ⎡ ⎤ = ⎢⎣− − − − + ⎥⎦ T (2.6) abc三相靜止座標、αβ兩相靜止座標與dq同步旋轉座標在空間中的位置關係如283H圖2.2 所 示。 a b c α β a b c α β a b c θ d q αβ / dq T abc/ αβ T 圖2.2:abc 三相靜止座標、αβ兩相靜止座標與dq 同步旋轉座標的空間關係
2.3 同步旋轉座標下 DVR 的狀態方程式
將284H(2.2)式abc三相靜止座標的狀態方程式,經過285H(2.5)式的轉換,並忽略 0 軸分量,可 得到同步旋轉座標下的DVR狀態方程式如下6 2 1 1 1 1 s f f s f f C C L L ω ω × × ⎡ − ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ − ⎡ ⎤ ⎢ ⎥⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢− − ⎥⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎢ ⎥ ⎣ ⎦ 2 2 2 2 2 2 2 J I 0 I I I J 0 cdq cdq fdq gdq fdq fdq v v = + v + i i i & & (2.7) 其中 2 1 0 0 0 0 1 0 1 0 0 1 0 cd fd fd cq fq fq v i v v i × v ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ =⎢ ⎥ =⎢ ⎥ =⎢ ⎥ =⎢ ⎥ =⎢ ⎥ =⎢ ⎥ − ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ I 02 2 J ⎣ ⎦ cdq fdq fdq v ,i , , , ,v s ω 為電網電壓的頻率,在電網電壓穩定的情況下ωs =120π(rad/s)。 286H (2.7)式的推導過程如下: 令287H(2.2)式為 abc abc d dt x =Ax +Bvfabc +Wigabc (2.8) 其中 6 1 6 3 6 3 6 6 1 1 1 1 f f abc f f C C L L × × × × × × × × ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ − ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ =⎢ ⎥ = =⎢ ⎥ =⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢− ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎢ ⎥ ⎣ ⎦ 3 3 3 3 3 3 3 3 3 3 3 3 0 I 0 I A B W I I 0 0 cabc fabc v x i , , , 由288H(2.5)式,可知 1 1 1 1 − − − −
=Tabc/dq =Tabc/dq =Tabc/dq =Tabc/dq
cabc cdq0 fabc fdq0 fabc fdq0 gabc gdq0
v v ,i i ,v v ,i i 上述轉換關係代入289H(2.8)式可得
(
) (
)
(
)
1 1 1 1 0 0 1 dq dq d dt − × − − − − × ⎛⎡ ⎤ ⎞ = + + ⎜⎢ ⎥ ⎟ ⎜⎢⎣ ⎥⎦ ⎟ ⎝ ⎠ abc/ dq 3 3abc/ dq abc/ dq abc/ dq
3 3 abc/ dq T 0 A T B T W T 0 T x x vfdq0 igdqo 將上式的等號左右側同乘 × × ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ abc/dq 3 3 3 3 abc/dq T 0 0 T 並整理,得到等號左側為
7 1 1 1 1 1 1 d dt d dt − × × − × × − − × × × − − × × × ⎛ ⎞ ⎡ ⎤ ⎡ ⎤ ⎜ ⎟ ⎢ ⎥ ⎜⎢ ⎥ ⎟ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎝⎣ ⎦ ⎠ ⎛ ⎞ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ =⎢ ⎥⎜⎜ ⎢ ⎥ +⎢ ⎥ ⎟⎟ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦⎝ ⎣ ⎦ ⎣ ⎦ ⎠ = abc/ dq 3 3 abc/ dq 3 3 3 3 abc/ dq 3 3 abc/ dq
abc/ dq 3 3 abc/ dq 3 3 abc/ dq 3 3
3 3 abc/ dq 3 3 abc/ dq 3 3 abc/ dq
T 0 T 0 0 T 0 T T 0 T 0 T 0 0 T 0 T 0 T dq0 dq0 dq0 x x x& 3 3 3 3 0 0 s ω × × ⎡ ⎤ + ⎢ ⎥ ⎣ ⎦ J J xdq0 x&dq0 其中 3 3 0 1 0 1 0 0 0 0 0 × ⎡ ⎤ ⎢ ⎥ = −⎢ ⎥ ⎢ ⎥ ⎣ ⎦ J 等號右側為
(
1) (
1)
(
1)
× − − − × ⎡ ⎤ ⎡ + + ⎤ ⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎣ ⎦ = + + abc/ dq 3 3abc/dq abc/dq abc/dq
3 3 abc/dq T 0 A T B T W T 0 T A B W dq0 fdq0 gdqo dq0 fdq0 gdq0 x v i x v i 移項後可得 3 3 3 3 0 0 s ω × × ⎛ ⎡ ⎤⎞ =⎜ − ⎢ ⎥⎟ + + ⎣ ⎦ ⎝ ⎠ J A B W J dq0 dq0 fdq0 gdq0 x& x v i 最後將上式中的0 軸分量移除,即為290H(2.7)式。
2.4 對稱成分法與鎖相迴路
2.4.1 對稱成分法(symmetrical components)[130H12, 131H13] 對稱成分法是種常用於三相訊號(電壓或電流)的分析技巧,其目的是將 abc 三相訊 號轉換成正負零相序訊號,在正負零相序的描述下,三相訊號的情況會以另一種更明瞭 的方式呈現。一般來說,一組三相弦波訊號,假設為電壓訊號v 、a v 和b v ,可以用複數c8 表示如下
[ ]
[ ]
[ ]
( 2 /3) ( 2 /3) Re Re Re Re Re Re s s s j t a g a j t b g b j t c g c v V e V v V e V v V e V ω ω π ω π − + ⎡ ⎤ = ⎣ ⎦= ⎡ ⎤ = ⎣ ⎦= ⎡ ⎤ = ⎣ ⎦= (2.9) 其中Vg為電網電壓標準值,V 、a V 和b V 稱為三相電壓的相量(phasor)。對稱成分法指出,c 任何三相相量,例如三相電壓相量V 、a V 和b V ,都能夠用九種對稱成分來表示,意即 c 0 0 0 a a a a b b b b c c c c V V V V V V V V V V V V + − + − + − = + + = + + = + + (2.10) 其中Va+、 b V+和 c V+為一組正相序(positive sequence)集合, a V−、 b V−和 c V−為一組負相序 (negative sequence)集合,以及 0 a V 、 0 b V 和 0 c V 為一組零相序(zero sequence)集合。291H(2.10)式 能以矩陣型式表示如下 0 0 0 a a a a b b b b c c c c V V V V V V V V V V V V + − + − + − ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ =⎢ ⎥ ⎢ ⎥ ⎢ ⎥+ + ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (2.11) 引入複數a e= j2 /3π = ∠1 120° ,將292H(2.11)式改寫成 0 a a b a c a V V V V V V + − ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ pn0/ abc T (2.12) 其中 2 2 1 1 1 1 1 a a a a ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ pn0 / abc T 因此,若要將任意三相相量轉換成對稱成分,可利用293H(2.12)式來求得,即 2 2 0 1 1 1 3 1 1 1 a a a a b b a c c V V a a V V V a a V V V V + − ⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎢ ⎥= ⎢ ⎥= ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦ -1 pn0/ abc T (2.13)9 從294H(2.13)式的關係來看,當電壓訊號只含有大小V 的正相序成分時,即 0 0 0 a a a V V V V + − ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥= ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ (2.14) 此時三相電壓為 2 a b c V V V a V V aV ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢= ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ (2.15) 或寫成 cos( ) cos( 2 / 3) cos( 2 / 3) a b c v V t v V t v V t ω ω π ω π ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢= − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ + ⎥ ⎣ ⎦ ⎣ ⎦ (2.16) 同樣地,當電壓訊號只含有大小V 的負相序成分時,即 0 0 0 a a a V V V V + − ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥= ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ (2.17) 此時三相電壓為 2 a b c V V V aV V a V ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢= ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ (2.18) 或寫成 cos( ) cos( 2 / 3) cos( 2 / 3) a b c v V t v V t v V t ω ω π ω π ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢= + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎣ ⎦ ⎣ ⎦ (2.19) 最後,當電壓訊號只含有大小V 的零相序成分時,即 0 0 0 a a a V V V V + − ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥= ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ (2.20) 此時三相電壓為
10 a b c V V V V V V ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥= ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ (2.21) 或寫成 cos( ) cos( ) cos( ) a b c v V t v V t v V t ω ω ω ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢= ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ (2.22) 根據295H(2.15)式、296H(2.18)式與297H(2.21)式的關係,可畫出正相序、負相序與零相序的相量關係如298H 圖2.3 所示。 Positive sequence a V b V c V Negative sequence a V c V b V a V b V c V Zero sequence 圖2.3:三相電壓的相量圖 2.4.2 鎖相迴路與正負相序之擷取方式
鎖相迴路(phase lock loop, PLL)是一種利用回授控制來估測輸入訊號相位的系統,典
型的鎖相迴路架構如 299H圖 2.4 所示,系統將估測的相位回授至派克轉換矩陣,企圖控制q 軸分量v 為零,從而達到輸入訊號相位q+ θ的完美估測。然而典型鎖相迴路對於不對稱輸 入訊號的相位量測並不準確。 abc v Tabc/ αβ vαβγ
T
αβ/dq + d v q + v PI 1sθ
ˆ
圖2.4:典型的鎖相迴路系統方塊圖 論文[132H14]提出了一種使用解耦型雙dq座標的鎖相迴路架構,使用了對稱成分法的概11 念來達成快速準確的量測。令三相電壓向量v 為 abc a b c v v v ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ abc v (2.23) 根據300H2.4.1 節,v 在abc αβ座標中的向量(忽略γ 軸的分量)可表示為正相序與負相序之組合 1 1 / 2 1 / 2 cos cos 2 sin sin 3 0 3 / 2 3 / 2 a b c v v v V V v v α αβ αβ β θ θ θ + θ − ⎡ ⎤ − − ⎡ ⎤⎢ ⎥ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ = ⎢ ⎥⎢ ⎥=⎢ ⎥ ⎢= ⎥ +⎢ ⎥ − − ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎢ ⎥⎣ ⎦ αβ v (2.24) 其中θ為電壓電角,Vαβ+ 與Vαβ− 分別表示αβ座標中正相序與負相序的對稱成分。由 301H2.4.1 節的敘述可知,正相序與負相序的轉向是相反的。因此套用同步旋轉座標軸的概念,將 302H (2.24)式的電壓向量轉換到同正相序轉速旋轉(後稱正轉)和同負相序轉速旋轉(後稱反轉) 的兩個轉向相反的dq座標之後,便可以得到正負相序估測成分 ˆ+ dq v 與 ˆv 如下 dq− ˆ ˆ ˆ cos sin ˆ ˆ ˆ ˆ sin cos ˆ ˆ ˆ ˆ
cos sin cos cos sin cos
ˆ ˆ sin ˆ ˆ sin
sin cos sin cos
ˆ ˆ cos( ) cos( ˆ sin( ) d q v v v v V V V α β αβ αβ αβ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ + + + − + ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ =⎢ ⎥= ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢− ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎡ ⎤⎡ ⎤ ⎡ ⎤⎡ ⎤ =⎢ ⎥⎢ ⎥ +⎢ ⎥⎢ ⎥ − − ⎣ ⎦ − ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎡ − ⎤ − − =⎢ ⎥ + − ⎢ ⎥ ⎣ ⎦ + dq v ) ˆ sin( θ θ) Vαβ − ⎡ ⎤ ⎢ ⎥ − − ⎢ ⎥ ⎣ ⎦ (2.25) ˆ ˆ ˆ cos( ) sin( ) ˆ ˆ ˆ ˆ sin( ) cos( ) ˆ ˆ ˆ ˆ
cos sin cos cos sin cos
ˆ ˆ sin ˆ ˆ sin
sin cos sin cos
ˆ cos( ) ˆ sin( ) d q v v v v V V α β αβ αβ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ θ − − − + − ⎡ ⎤ ⎡ ⎤ − − ⎡ ⎤ =⎢ ⎥ = ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢− − − ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎡ − ⎤⎡ ⎤ ⎡ − ⎤⎡ ⎤ =⎢ ⎥⎢ ⎥ +⎢ ⎥⎢ ⎥ − − ⎣ ⎦ − ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎡ + ⎤ = ⎢ ⎥ + ⎢ ⎥ ⎣ ⎦ dq v ˆ cos( ) ˆ sin( ) Vαβ Vαβ θ θ θ θ + + ⎢⎡ − ⎤⎥ − − − ⎢ ⎥ ⎣ ⎦ (2.26)
12 其中θ 為鎖相迴路估測到的電角相位。假設ˆ θ θ≈ ˆ,則利用303H(2.25)式與304H(2.26)式可以描述正 負相序訊號v 與dq+ − dq v 近似為 1 ˆ cos( 2 ) ˆ ˆ sin( 2 ) d d q q v v V V v v αβ αβ θ θ θ θ + + + − + + ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ − ⎤ =⎢ ⎥ ⎢ ⎥ ⎢≈ = ⎥ +⎢ ⎥ − − ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ + dq v (2.27) 1 ˆ cos( 2 ) ˆ ˆ sin( 2 ) d d q q v v V V v v αβ αβ θ θ θ θ − − − + − − − ⎡ ⎤ ⎡ ⎤ ⎡ − ⎤ ⎡ ⎤ =⎢ ⎥ ⎢ ⎥≈ =⎢ ⎥ +⎢ ⎥ − − + ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ dq v (2.28) 根據305H(2.27)式與306H(2.28)式,可畫出解耦型雙同步旋轉座標鎖相迴路的方塊圖如307H圖2.5 所示。308H 圖2.5 中的LPF方塊為一階低通濾波器,能濾除高頻,使d軸分量維持直流。在這種正相、 負相序解耦得結構下,鎖相迴路量測的正相序相位不再受負相序的耦合項干擾,可以準 確地檢測出輸入電壓的相位。解耦型雙dq座標鎖相迴路中各向量的位置關係圖如309H圖2.6 所示。在往後的DVR系統模擬與討論,都會使用這種解耦型鎖相迴路來量測電網電壓的 相位。 abc v Tabc/ αβ vαβγ Tαβ/dq αβ/dq T + d v q + v LPF LPF − d v PI 1s cos −2 2 − sin q − v
ˆ
θ
ˆ
θ
ˆ
θ
−
Vαβ+ Vαβ− 圖2.5:解耦型雙 dq 座標鎖相迴路之方塊圖13 α β
ˆ
θ
ˆ
θ
−
d+ q+ q− d− 圖2.6:解耦型雙 dq 座標鎖相迴路中各向量的位置關係圖 在鎖相迴路準確量測出電壓相位後,還需要利用其它方法來擷取出各個訊號對應的 正負相序訊號。正負相序擷取的方法有很多,常見且簡單的方法有延遲訊號消除法以及 帶阻濾波器擷取法兩種。A. 延遲訊號消除法(delay signal cancellation, DSC)[133H15]
延遲訊號消除法是一種簡單且快速的正負相序擷取方式,系統方塊圖如310H圖2.7 所示, 其中T 表示輸入訊號頻率的四分之一個週期。當三相訊號不平衡時,正轉dq座標(d 311H圖2.6 中藍色座標)下本應為直流的正相序訊號會出現由負相序造成的兩倍基頻之弦波訊號; 同樣地,在反轉dq座標(312H圖 2.6 中紅色座標)下負相序亦會出現由正相序造成的兩倍基頻 之弦波訊號,此方法將欲擷取訊號延遲四分之一個週期後與延遲前訊號相加,如此兩倍 基頻的弦波成分將會被消除,只留下直流訊號,達成正負相序的擷取。延遲訊號消除法 的數學描述如下 (1 ) ( ) (1 ) ( ) d d T s T s e e θ θ − − = + = + − 3s / 2r 3s / 2r T T + dq abc -dq abc v v v v % % (2.29) 其中v% 與dq+ v% 表示利用延遲訊號消除法後留下的正負相序直流訊號。 dq−
14 abc v 3s / 2r T
ˆ
θ
d T se
− DELAY + dq v% 3s / 2r T d T se
− DELAY − dq v%ˆ
θ
−
1 / 2 1 / 2 圖2.7:延遲訊號消除法系統方塊圖 延遲訊號消除法的範例如圖2.8 所示,上方v 為帶有兩倍基頻的輸入訊號,其數學in 表示為 1 0.5cos(2 ) in v = + ωt 其中ω 為基頻120π。中間vdelay為延遲基頻四分之一週期的訊號,數學表示為 1 0.5cos(2 / 120) 1 0.5cos(2 ) delay v t t ω ω ω π = + − = + − 下方v 為延遲訊號擷取的結果,其穩態值為一直流量,數學表示為 out(
)
2 1 2 0.5cos(2 ) 0.5cos(2 ) 2 1 in delay out v v v t t ω ω π + = = + + − =B. 器來 有其 取法 號經 其數 其中 當ξ越 的範 其中 帶阻濾波器 使用帶阻濾 來儲存四分之 其優勢,本論 法與延遲訊號 經由濾波器濾 數學表示為 中ξ為阻尼系 越大,濾波 範圍會越接近 中v% 與dq+ − dq v% 表 器(notch fil 濾波器擷取 之一個週期 論文的模擬 號消除法類 濾掉,留下 系數,ωc為希 波器濾除訊 近ωc。帶阻 表示經過帶阻 圖2.8: lter)擷取法 取正負相序的 期內的採樣訊 擬亦使用二階 類似,其概念 下的直流訊號 ( ) notch G s 希望濾除的 訊號的頻率範 阻濾波器擷取 no no G G = = + dq -dq v v % % 阻濾波器後 15 延遲訊號擷 法 的方法如313H圖 訊號,在實 階帶組濾波 念一樣是將 號即為正負 2 2 2 c s s ω ξω + = + 的頻率(在正 範圍就越寬 取法的數學 ( ) ( ( ) ( otch otch s s θ 3s / 2r 3s / 2r T T 後留下的正負 擷取法之範 圖2.9 所示 實作上比較複 波器來完成正 將正轉dq座標 負相序訊號 2 2 c cs c ω ω +ω 正負相序擷取 寬,反之,ξ 學描述如下 ) ) θ θ − abc abc v v 負相序直流 範例 。由於延遲 複雜,因此 正負相序的 標與反轉dq 。濾波器採 取中設為兩 ξ越接近零 流訊號。 遲訊號消除法 此帶阻濾波擷 的擷取。帶阻 q座標上的兩 採用二階帶阻 (2. 兩倍基頻240 ,則濾波器 (2. 法須要緩衝 擷取法便具 阻濾波器擷 兩倍基頻訊 阻濾波器, 30) 0π rad/s)。 器濾除訊號 31) 衝 具 擷 訊 號
16 abc v 3s / 2r T
ˆ
θ
+ dq v% 3s / 2r T v%dq−ˆ
θ
−
( )
notchG
s
( )
notchG
s
圖2.9:帶阻濾波器擷取法系統方塊圖2.5 動態電壓補償器的補償策略[
134H16]
DVR 對於電壓驟降的補償策略分為三種:驟降前(pre-sag)補償、同相位(in-phase) 補償以及最佳化能量(energy optimized)補償。 A. 驟降前補償 驟降前補償是DVR對於電壓驟降最基本的補償策略,DVR提供的補償電壓會將負載 端電壓恢復至驟降前的情況,相量圖如14H圖2.10 所示,其中V 表示補償電壓、c Vsag表示驟降後電壓、Vpre sag− 表示驟降前電壓、Iload表示負載電流以及Vload表示負載電壓。由於負
載端所看到的電壓在補償前後幾乎沒有改變,因此這種驟降前補償策略對負載的影響是 最小的。
17 pre sag load
V − =V c V sag V load I Re Im 圖2.10:驟降前補償策略的相量圖 B. 同相位補償 當電壓驟降伴隨著相位飄移(phase jump),即驟降後相位發生改變時,同相位補償是 一種能夠以最小振幅的電壓來恢復電壓驟降的補償策略,相量圖如 315H圖 2.11 所示,其中 , load pre sag
I − 表示驟降前負載電流以及Iload sag, 表示驟降後負載電流,此補償策略下DVR提 供的補償電壓將與驟降後的電網電壓相同相位,從負載來看,負載端電壓振幅大小不會 改變,但相位飄移仍舊會發生。 load V c V sag V , load sag I Re Im , -load pre sag
I pre sag V − 圖2.11:同相位補償策略的相量圖 C. 最佳化能量補償 最佳化能量補償的目的是盡可能地使用以虛功補償電壓驟降,相量圖如 316H圖 2.12 所
18 示,DVR提供的補償電壓與補償後的負載電流垂直,如此一來便不會消耗儲能元件的能 量,得以延長補償時間。然而此方法的缺點在於負載端會發生相位飄移的情況,此外依 驟降型式的不同,補償電壓可能要求要有很高的振幅,不符合現實中電路的輸出範圍, 是故最佳化能量補償策略僅適用於程度較輕的電壓驟降。 圖2.12:最佳化能量補償策略的相量圖 由於本論文視DVR的儲能元件視為直流電壓源,因此在有效保護敏感負載的前提下, 選擇同相位補償策略來完成電壓驟降的補償是比較合適的方法。產生補償電壓參考值所 依賴的鎖相迴路技術已於317H2.4 節介紹。
19
第三章
3.動態電壓補償器之線性控制
本章將介紹動態電壓補償器在同步旋轉座標下的線性控制。318H3.1 節先介紹對稱電驟 降下的解耦PI控制,319H3.2 節以解耦PI控制為基礎,修正控制器使DVR系統具有不對稱電 壓驟降的補償能力,320H3.3 節則以LQR狀態回授設計新的控制方式,並在321H3.4 節透過數值模 擬來比較各種控制器在電壓驟降時的表現。3.1 對稱電壓驟降下 DVR 的線性控制
對稱電壓驟降(symmetrical voltage dip),指的是三相電壓的驟降深度相同的驟降型 式,在這種驟樣型式下,dq 軸的電壓訊號會以直流呈現,所以控制方式相對簡單。 為了得到DVR系統的轉移函數,將322H(2.7)式同步旋轉座標下的DVR狀態方程式取拉式 轉換,可推導出同步旋轉座標下補償電壓與電感電流之關係式如下 =L sf + fdq fdq 1 v i d (3.1) * fdq v 1 d 1 fL s fdq i 2 d 1 f C s vcdq * cabc v DVR PWMvfdq ( ) notch G s ( ) notch G s 3s / 2r T 3s / 2r T θ θ − * ˆ+cdq v * ˆ−cdq v cabc v ifabc + cabc v i+ fabc − cabc v i−fabc
positive sequence control negative sequence control
(3.2) 其中 s f s f L C
ω
ω
= + = + J J 1 fdq cdq 2 cdq gdq d i v d v i s ω 為電網電壓電角的轉速。根據323H(3.1)式與324H(3.2)式得到DVR的開迴路系統方塊圖如325H圖 3.1。 fdq v 1 d 1 f L s fdq i 2 d 1 f C s vcdq20 圖3.1:DVR 的開迴路系統方塊圖 論文[135H6]提出了在同步旋轉座標下一種雙迴路DVR的解耦控制,外迴路控制補償電壓 cdq v ,內迴路控制電感電流ifdq,並將d 與1 d 視為擾動項。整個控制系統的方塊圖如2 326H圖 3.2 所示。 * fdq v 1 d 1 f L s fdq i 2 d 1 f C s vcdq ii pi K K s + 1 d 2 d iv pv K K s + * fdq i * cdq v DVR PWM vfdq 圖3.2:同步旋轉座標下 DVR 雙迴路控制的系統方塊圖 327H 圖3.2 的控制系統中兩個迴路皆採用比例積分控制器,同時為求提高控制精度,會 將控制訊號扣除d 與1 d 兩項,以降低dq軸訊號交互耦合帶來的影響。為了簡化分析,2 假設PWM反流器輸出v 與參考值fdq * fdq v 完全相同,如同一理想電壓源,則內迴路電流控 制系統中輸入輸出的關係式將會是 * 2 pi ii f f pi ii f f K K s L L K K s s L L + = + + fdq fdq i i (3.3) 其中Kpi與K 分別為內迴路電流控制中比例控制器與積分控制器的增益。在外迴路控制ii 的部分,假設內迴路控制能快速完成電感電流ifdq的追蹤,即ifdq =i*fdq,則外迴路電壓 控制系統中輸入輸出的關係式將會是 * 2 pi ii f f pi ii f f K K s L L K K s s L L + = + + fdq fdq i i (3.4)
21 * 2 pv iv f f pv iv f f K K s C C K K s s C C + = + + cdq cdq v v (3.5) 其中Kpi與K 分別為外迴路電壓控制中比例控制器與積分控制器的增益。 ii 為了滿足假設ifdq =i*fdq使328H(3.5)式成立,系統參數要求讓內迴路控制的響應速度遠比 外迴路控制來得快,換句話說,內迴路電流控制的時間常數(time constant)τi需要遠小於 外迴路電壓控制的時間常數τv 10 v i τ ≥ τ (3.6) 根據329H(3.6)式的設計準則,並給定濾波器參數為 0.2mH f L = 及Cf =1000μF[136H7],設計 出的系統參數列於330H表3.1 pi K 2 ii K 20 Lf 0.2mH i τ 0.2ms pv K 0.8 iv K 10 Cf 1000μF v τ 2.5ms 表3.1:DVR 使用同步旋轉座標下解耦雙迴路 PI 控制的系統參數 由331H表3.1 設計出的系統,其開迴路之轉移函數Go l. .( )s 如下 6 2 7 9 . . 4 4 3 5 2 8 10 18 10 10 ( ) 10 10 o l s s G s s s s × + × + = + + (3.7) 此型態 2 系統之開迴路極點位於0, 0, 10, 9990− − ,零點位於−10, 12.5− 。系統開迴路波 德圖如332H圖3.3 所示,圖中顯示系統具有很高的低頻增益,相位邊限(phase margin)為84.5 ° , 增益邊限(gain margin)無限大。
越量
3.2
是肇 造成 圖3.3 系統閉迴路 量約為1.5% 圖3.4:不對稱電
334H 3.1 節討論 肇因於單線接 成三相電壓驟 :DVR使用 路步階響應 。 DVR使用電壓驟降下
論了DVR在對 接地故障(si 驟降的深度 用同步旋轉 應如333H圖3.4所 用同步旋轉座下
DVR 的
對稱電壓驟 ingle line-to 度不相等, 22 轉座標下解耦 所示,圖中 座標下解耦的線性控制
驟降下的系 o-ground fa 這種驟降 耦雙迴路P 中顯示系統在 耦雙迴路PI制
系統響應,然 ault)或者線 降型式稱為不 PI控制的開 在5毫秒內 控制的閉迴 然而現實中 線對線間故障 不對稱電壓 開迴路波德圖 內即到達穩態 迴路步階響 中電壓驟降的 障(line-to-li 壓驟降(uns 圖 態,最大超 響應 的發生往往 ine fault), ymmetrical 超 往 l23 voltage dip)。以下將介紹不對稱電壓驟降時DVR的線性控制方式。 3.2.1 基於正負相序擷取的雙同步旋轉座標PI 控制 不對稱電壓驟降時,同步旋轉座標上會出現兩倍基頻的弦波訊號,因此補償電壓也 應該要是帶有兩倍基頻弦波的直流訊號。由於 PI 控制器對弦波訊號不具有零誤差追蹤 的能力,也就是追蹤穩態誤差不為零,因此當不對稱電壓驟降發生時,為了提高控制精 度,系統必須拆成正相序與負相序分別控制。正相序訊號處於正轉 dq 座標中,而負相 序訊號處於反轉dq 座標中,因此稱此正負相序分別控制的方法為雙同步旋轉座標的 PI 控制。 基本上,雙同步旋轉座標的PI控制,其控制系統架構與 335H3.1 節類似,最大的不同在 於進行dq轉換時,必須先擷取出正相序與負相序訊號,再將訊號送至相對應的控制器去。 正負相序PI控制器的設計如下[137H7] 1 =L sf + + + + fdq fdq v i d (3.8) 2 f C s + = + + + fdq cdq i v d (3.9) 1 =L sf − + - -fdq fdq v i d (3.10) 2 f C s − = - + -fdq cdq i v d (3.11) 其中 1 2 1 2 s f s f s f s f L C L C ω ω ω ω + + − − = + = + = + = + J J J J + + fdq cdq + + cdq gdq - -fdq cdq - -cdq gdq d i v d v i d i v d v i 其中ωs為電網電壓的頻率,變數上標" "+ 表示正相序訊號,變數上標" "− 表示負相序訊 號。此控制系統將控制訊號參考值v 經過座標轉換,先輸入到帶阻濾波器濾除兩倍基cdq* 頻的訊號後,再送入336H圖 3.2 的系統產生控制輸入,如 337H圖3.5 所示。338H(2.30)式二階帶阻濾
24 波器的參數設計列於339H表3.2,至於PI控制器參數則延用340H表3.1 之設計。 ξ 0.707 ωc 240 rad/sπ 表3.2:二階帶阻濾波器參數 * fdq v 1 d 1 f L s fdq i 2 d 1 f C s vcdq * cabc v DVR PWM vfdq ( ) notch G s ( ) notch G s 雙迴路 PI 雙迴路 PI 3s/ 2r T 3s/ 2r T θ θ − * ˆ+ cdq v * ˆ− cdq v cabc v ifabc + cabc v i+ fabc − cabc v i− fabc
positive sequence control
negative sequence control
1, 2 d d+ + 1, 2 d d− − 圖3.5:正負相序擷取的雙同步旋轉座標 PI 控制系統方塊示意圖 根據341H表3.1 與342H表3.2 的參數,並假設PWM反流器可視為理想電壓源(即 * fabc fabc v = v ), 且耦合相完全消除,並令輸入 * cabc v 經過正負轉向的dq轉換後成為 ˆv 與 ˆcdq+* v ,為了方便cdq-* 分析,在此僅考慮正負相序控制只有其中一個控制系統動作的情況,如此一來 ˆv 、 ˆ+*cdq -* cdq v 與輸出vcdq的開迴路關係式可分開表示。當只有正相序控制動作時 ˆ ( ) ( ) ( ) PI PI G+− s G+− s θ = +* = T3s/ 2r * cdq cdq cdq v v v (3.12) 當只有負相序控制動作時 ˆ ( ) ( ) ( ) PI PI G+− s G+− s θ = -* = T3s/ 2r − * cdq cdq cdq v v v (3.13) 其中 4 3 5 2 7 8 7 6 4 5 4 3 5 2 7 8 1.6 36 9.1 10 2.05 10 1.14 10 ( ) 2 10 22.13 10 3.87 2900 9.6 10 2.07 10 1.14 10 PI s s s s G s s s s s s s + − − − + + × + × + × = × + × + + + × + × + × 系統G+−PI( )s 為帶阻濾波器串聯PI控制器以及DVR系統後得到的轉移函數,其極零點配 置如343H圖3.6 所示。系統G+−PI( )s 步階響應如344H圖3.7 所示,可發現由於帶阻控制器的引入, 導致系統對於步階訊號的暫態響應惡化,見345H圖3.7 中的藍色實線。
圖3. (紅色 正轉 相序 過濾 線), .7:使用正 色實線)的步 系統G+−PI( 轉dq座標下帶 序參考值v+*cdq 濾波後兩倍基 ,因此能預期 正負序擷取的 步階響應 ( )s 對於帶有 帶有兩倍基 q,藍色實線 基頻的訊號 期系統表現 圖3.6:系 的雙同步旋 有兩倍基頻 基頻參考值v 線為系統響 號消失,此時 現良好,響 25 系統G+−PI( )s 旋轉座標PI控 頻訊號之步階 ˆ* cdq v ,紅色虛 響應v 。由cdq+ 時系統輸出 響應快速且穩 的極零點配 控制(藍色實 階的暫態響 虛線為經過 由347H圖3.8 可 出(藍色實線) 穩態誤差小 配置圖 實線)與單同 響應如 346H圖 3 過帶阻濾波 可看出參考值 )能夠良好追 小。 同步旋轉座 .8 所示,綠 波器濾掉兩倍 值 ˆv*cdq(綠色 追蹤其參考 座標PI控制 綠色實線為 倍基頻的正 色實線)在經 考值(紅色虛 制 為 正 經 虛
3.2.2 落下 負相 需要 的缺 DVR 其中 圖3. 2 同步旋 348H 3.2.1節討論 下PI控制器對 相序的訊號 要一組獨立的 缺點,本節使 R作同步旋轉 理想諧振控 中K為控制器 8:系統G+ 旋轉座標下的 論了將訊號 對弦波訊號 ,使得系統 的控制器, 使用了一種 轉座標下的 控制器的數 器的增益, 圖3.9: ( ) PI s +− 對於 的解耦PI+ 號分解成正負 號追蹤能力不 統暫態響應變 讓系統整體 種將PI控制器 的解耦控制 數學表示如下 ( G 0 ω 為諧振 理想諧振控 ˆc v * cdq v− 26 於帶有兩倍基 +R 控制 負相序分別 不佳的缺點 變差(如349H圖 體架構變得 器並聯諧振 。 下 2 ( )s Ks s ω = + 振頻率,其波 控制器的波 * cdq cdq v− 基頻訊號的 別控制的方式 點。然而系統 3.7 所示); 得龐大,將不 振(resonant)控 2 0 ω 波德圖如350H圖 波德圖(ω0 = 的步階訊號的 式,能夠有 統中使用了 ;再者,由 不利於硬體 控制器的PI 圖3.9所示。 120π ,K 的暫態響應 有效改善不對 了帶阻濾波器 由於正相序與 體實現。為了 I+R控制器[ (3. 。 1 = ) 應 對稱電壓跌 器來擷取正 與負相序都 了改善以上 [138H17],來對 14) 跌 正 都 上 對
由351H圖 低諧 [139H18] 其中 德圖 表示 其中 將出 控制 實現 也能 在系 圖3.9可知 諧振控制器對 中K 為諧振R 圖與截止頻率 示控制器在頻 圖 根據353H(3.15) 中K 為諧振PR 出現兩倍基頻 制器的使用即 現不對稱電壓 能改善正負相 系統參數設計 ,諧振控制 對頻率變化 振控制器的增 率ωc的關係 頻率ω0附近 圖3.10:修正 )式中的諧振 PI G 振控制器的增 頻(120Hz)的 即是為了提 壓驟降時的 相序擷取造 計上,為了 制器是一種在 化的靈敏度( ( ) R G s = 增益,ωc為 係如352H圖3.10 近越寬的範圍 正後的諧振 振控制器, ( ) I R+ s =Kpv 增益。如同 的訊號,而 提高控制器在 的補償電壓追 造成暫態響應 了方便分析, 27 在頻率ω0處 (sensitivity) 2 2 R c c K s s ω ω = + 為諧振控制 0所示,當ω 圍具有高增 振控制器之波 設計一種的 2 iv K s s + + 同 354H3.2.1 節 而兩倍基頻訊 在兩倍基頻 追蹤控制, 應變慢的缺 ,把系統內 處具有極高增 ,一般會修 2 0 s ω + 制器的截止頻 c ω 越大控制 增益。 波德圖(ω0 的PI+R控制 2 4 PR c c K s s ω ω ω + + 節所述,不對 訊號是PI控 頻處的增益 不但省去了 缺點。 內迴路電流的 增益的控制 修正諧振控 頻率,修正 制器大小值大 120π = ,K 制器如下 2 s ω 對稱電壓驟 控制器無法零 ,讓系統在 了額外的負 的比例積分 制器。實際上 控制器之數學 (3. 正後的諧振控 大於零的範 20 R K = ) (3. 驟降時同步旋 零誤差追蹤 在單一旋轉座 負相序控制系 分控制器修改 上,為了降 學表示為 15) 控制器之波 範圍就越廣, 16) 旋轉座標中 蹤的。PI+R 座標下就能 系統,同時 改成比例控 降 波 中 R 能 時 控
28 制器,從電路的關係來看,由355H(2.1)式可知內迴路控制變數的電感電流與外迴路控制變數 的補償電壓微分有關,因此內迴路電流控制中的積分器,在一定程度上,可以用外迴路 電壓控制中的比例控制器來取代。系統控制方塊圖如 356H圖 3.11 所示,外迴路的部分採用 357H (3.16)式的PI+R控制器,內迴路使用比例控制器,假設PWM可視為理想電壓源(即 * fabc fabc v = v ),以及耦合項d 、1 d 能夠完全被消除,那麼系統開迴路下的輸入輸出關係2 為 ( ) PIRsys G s = * cdq cdq v v (3.17) 其中 3 2 2 2 5 4 2 3 2 2 ( 2 ) (2 4 ) 4 ( ) (2 ) 2 (2 ) pv PR c pv c iv iv c pv s iv s PIRsys pi f F f f c pi f f s pi c f pi s K s K K K s K K s K G s K C L s C L K s C L K s C K s ω ω ω ω ω ω ω ω ω + + + + + + = + + + + + * fdq v 1 d 1 f L s fdq i 2 d 1 f C s vcdq pi K 1 d 2 d ( ) PI R G + s * fdq i * cdq v DVR PWM vfdq 圖3.11:DVR 使用同步旋轉座標下 PI+R 控制的系統方塊圖 358H (3.17)式中的系統為型態 2,可知對步階訊號的穩態誤差為零。令系統參數與控制器參數 延用359H表3.1,依照[140H19]的建議,ωc範圍在5 至 15 rad/s之間會有較合適的靈敏度,因此本 論文選擇ωc =5 rad/s使諧振控制器較理想,如此一來待決定的參數僅剩K 。為了使系PR 統在同步旋轉座標下對直流訊號以及兩倍基頻的訊號有良好的追蹤效果,K 的設計準PR 則為閉迴路系統波德圖在直流以及兩倍基頻處能夠有接近0dB的增益以及足夠小的相位 差。K 與閉迴路波德圖的關係如PR 360H圖3.13 所示,K 與閉迴路步階響應的關係如圖 3.14PR 所示,從圖 3.13 與圖 3.14 中可發現,當K 越大,閉迴路波德圖在兩倍基頻處的相位PR
越接 系統 (單位 利用 數值 況下 超越 3.15 式, 由於 接近0o,卻同 統在兩倍基頻 位為百分比 用MATLAB 值計算 f x y( , 下,閉迴路波 越量為11.7% 所示,可發 並計算閉迴 於極點皆位於 同時也提高 頻處的相位 ),設計一函 找出不同K ) y 與K 的PR 波德圖在兩 %。比較3. 發現加入諧振 迴路系統的 於左半平面 圖 高了閉迴路步 位(單位為度 函數如下 ( f x PR K 時符合 1 min K ≤ 的關係如圖3 兩倍基頻處的 1節、3.2.1 振控制器後 的極點,得到 20 − 面,主極點位 圖3.12: x 29 步階響應的 度),變數y為 , ) 5 x y = x + 合條件的最小 80 nimize ( , PR K ≤ f x 3.12所示, 的相位為− 1節與本節 後暫態響惡化 到系統閉迴 9206.4 09.3 1038 424.9 12.9 j − ± − − 位於−12.9 、y、 f x( 的最大超越量 為GPIRsys( )s y + 小的 f x y( , ) ) y 可找到最佳 3.75o、增益 節中設計的控 化。將K 以PR 迴路極點為 8.8 ,可知閉迴 , ) x y 與KPR ( , ) f x y y 量。令變數 ) 閉迴路步階 ) ,即 佳的KPR = 益為 0.025d 控制器,其 以及表3.1的 迴路系統為穩 R的關係 x 數x為GP IR sys 階響應的最 (3. 20。在KPR dB,步階響 其閉迴路步階 的系統參數 穩定。 ( ) s s 閉迴路 最大超越量 18) 20 R = 的情 響應的最大 階響應如圖 數代入(3.17) 路 量 情 大 圖 )
圖3. 與單 圖3 圖3 .15:使用同 單同步旋轉座 3.13:DVR 3.14:DVR 同步旋轉座標 座標PI控制 R使用PI+R R使用PI+R 標下的PI+ 制(綠色實線 30 R控制下KP R控制下K +R控制(藍色 線)的閉迴路 PR K 與閉迴路 PR K 與閉迴路 色實線)、正 路步階響應 路步階響應的 路系統波德 正負序擷取的 的關係 德圖的關係 的PI控制((紅色實線))