DEVELOPMENT OF A BEHAVIOR-BASED COOPERATIVE SEARCH
STRATEGY FOR DISTRIBUTED AUTONOMOUS MOBILE ROBOTS
USING ZIGBEE WIRELESS SENSOR NETWORK
Tzu-Chiang Shih, Syh-Shiuh Yeh, and Pau-Lo Hsu
ABSTRACT
To achieve efficient and objective search tasks in an unknown environment, a cooperative search strategy for distributed autonomous mobile robots is developed using a behavior-based control framework with individual and group behaviors. The sensing information of each mobile robot activates the individual behaviors to facilitate autonomous search tasks to avoid obstacles. An 802.15.4 ZigBee wireless sensor network then activates the group behaviors that enable cooperative search among the mobile robots. An unknown environment is dynamically divided into several sub-areas according to the locations and sensing data of the autonomous mobile robots. The group behaviors then enable the distributed autonomous mobile robots to scatter and move in the search environment. The developed cooperative search strategy successfully reduces the search time within the test environments by 22.67% (simulation results) and 31.15% (experimental results).
Key Words: Cooperative search strategy, distributed mobile robots, behavior-based control, ZigBee, wireless sensor network.
I. INTRODUCTION
The rapid development of mobile robotics in recent decades has increased the importance of developing a target search using autonomous mobile robots in rescue and security applications [1–5]. Moreover, multiple mobile robots provide higher search efficiency than a single unit [6–9]. Nevertheless, search performance remains affected by two physical factors, namely, communicatory [7, 10–15] and environmental factors [11, 15, 16]. Furthermore, the developed strategy can signifi-cantly affect search efficiency [6, 17, 18]. In this paper, a search strategy is defined as an algorithm that controls the interactions among multiple mobile robots through communi-cations in order to effectively search for the target object. Therefore, conditions with fixed physical factors (i.e., environ-ments with a fixed communicatory factor and an invariant environmental factor) require an efficient search strategy to reduce the search time.
Although multiple mobile robots can accomplish search tasks [6, 7], communication among the units allows for effective coordination through information sharing. Thus, the search strategy is improved by reducing search time and the number of mobile robots that need to be used [13]. Nevertheless, the control of such robots through com-munication is difficult. It is also dependent on the commu-nication architecture, which uses a central controller that provides optimal solutions to execute the search tasks. The search performance, however, is limited by severe require-ments related to the computational burden and communica-tion bandwidth [11, 13, 19]. Therefore, distributed robotic systems are developed to achieve control with low compu-tation and communication loads [20–22]. A behavior-based control framework [23] is widely used for its superior oper-ating performance in real-world environments [1, 5, 24–29]. Thus, an efficient search strategy using distributed mobile robots with the behavior-based control framework is desir-able for various search tasks.
Although diverse strategies have been developed for search tasks [17, 30–35], the randomized search strategy [30] is extensively adopted in real-world applications due to its relatively easy and low-cost implementation [26]. However, this strategy randomly drives distributed mobile robots without ensuring search efficiency, which is significantly affected by the cooperative strategy developed with multiple behaviors. Furthermore, the cooperative search strategy only considers individual behaviors of distributed mobile robots, usually with limited search efficiency [25, 26]. Hence, by Manuscript received January 29, 2012; revised July 21, 2012; accepted September
23, 2012.
Tzu-Chiang Shih is with Leader Automation Co., Ltd., 51547 Changhua, Taiwan. Syh-Shiuh Yeh (corresponding author, e-mail: [email protected]) is with Depart-ment of Mechanical Engineering, National Taipei University of Technology, 10608 Taipei, Taiwan.
Pau-Lo Hsu is with Department of Electrical Engineering, National Chiao Tung University, 30080 Hsinchu, Taiwan.
This work was supported by National Science Council of the Republic of China under Contract NSC 97-2218-E-009-007 and NSC 98-2218-E-027-001. The authors would like to thank Mr. Jen-Pin Hsiao and Mr. Cheng-Chung Hsu for preparing the experimental setup.
referring to previous works, the cooperative search strategy that further considers group behaviors of distributed mobile robots can improve search efficiency.
In this paper, a cooperative search strategy based on the behavior-based control framework is developed to allow dis-tributed mobile robots to conduct efficient and autonomous search of a target object in an environment. In comparison with existing search strategies, the behavior-based control frame-work integrates individual and group behaviors. Activated by the sensing information of each mobile robot, individual behaviors include finding an object, obstacle avoidance, and wandering (used for random exploration of the area). This paper also develops group behaviors that are activated by an 802.15.4 ZigBee wireless sensor network to enable coopera-tive search among the mobile robots. The wireless sensor network communicates all sensing information and data related to the group behaviors among mobile robots. In case the search environment is completely unknown, the coopera-tive search strategy dynamically divides the environment into several sub-areas by referring to the locations and sensing information of the mobile robots. Afterwards, each mobile robot explores a sub-area for the target object while avoiding those occupied by other mobile robots. Therefore, the group behaviors include the dynamic inter-robot avoidance (i.e., used for allocating mobile robots in different sub-areas) and dynamic robot wandering (i.e., used for randomly exploring the environment while avoiding the other occupied sub-areas). Simulations and experiments on a distributed mobile robot system demonstrate the feasibility of the cooperative search strategy with the group and individual behaviors developed in this paper.
This paper is organized as follows. Section II describes the autonomous behaviors developed to control the motions of mobile robots as they perform the objective search tasks. Individual behaviors developed for each mobile robot are detailed in this section. Section III describes the cooperative search strategy and the group behaviors developed for unknown environments. This section presents the behavior-based control framework that integrates the individual and group behaviors to improve the search efficiency. Further-more, several simulation results validate the proposed approaches. Section IV presents the experimental results that demonstrate the feasibility of the cooperative search strategy and the autonomous behaviors developed for real applications. Section V concludes this paper.
II. AUTONOMOUS BEHAVIORS OF
MOBILE ROBOTS
This paper employs the behavior-based control frame-work for mobile robots first proposed by R. Brooks of the MIT in 1986 [23]. This control framework is hierarchical and
includes different behavioral levels, each of which has an execution goal and a corresponding output. All behavioral levels are simultaneously executed. However, due to the hier-archical framework, the output of the high-priority behavioral level restrains that of the low-priority behavioral level, and the control rules of the mobile robot determine the final output of the control framework.
Individual and group behaviors are developed and implemented to control the distributed mobile robots to ensure an efficient and autonomous search. The individual behaviors are created as the fundamental search functions of each mobile robot, and the group behaviors are created as additional functions for cooperative search. According to the requirements of objective search, three individual behaviors are developed as follows.
• Finding an object. Objective search tasks aim to find the target object in a particular environment. In this paper, the target object is detected by color reference; therefore, each mobile robot should automatically detect an object’s color by using an image sensor. This behavior module responds immediately when one of the mobile robots finds the target object, after which all mobile robots stop their search.
• Obstacle avoidance. Environments have obstacles that a mobile robot must avoid while searching for the target object. In this paper, the mobile robots use two sensors to detect obstacles. The mobile robot equipped with a laser range finder can detect obstacles in front, whereas those equipped with two ultrasonic sensors at the front-left and front-right sides can only detect obstacles located in certain directions. The mobile robot moves along collision-free directions upon detection of nearby obstacles.
• Wandering. The target object could be randomly located in an environment. A mobile robot with this behavior can move accordingly and explore the envi-ronment to increase the possibility of finding the object. This paper develops the wandering behavior to enable mobile robot movement, with constant linear and angular velocities, along a randomly selected direc-tion for a fixed period.
During objective search tasks, group behaviors correspond-ing to a cooperative search strategy are developed to enhance the interaction among mobile robots while search-ing for the target object in a particular environment. Here, an 802.15.4 ZigBee wireless sensor network implements the group behaviors. All mobile robots communicate with each other via the wireless sensor network, exchange sensing data, and then execute the developed group behaviors by referring to the obtained sensing data and the resultant indi-vidual behaviors.
III. COOPERATIVE STRATEGY
FOR SEARCHING AN OBJECT IN AN
UNKNOWN ENVIRONMENT
3.1 Descriptions of the cooperative strategy and the corresponding group behaviors
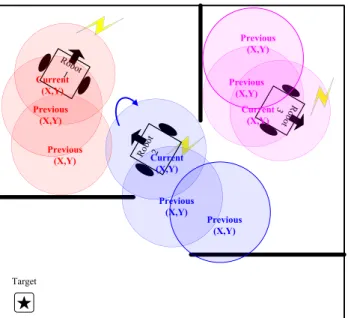
In case an environment is completely unknown, includ-ing all conditions such as size and obstacle locations, a dynamic method is developed to divide the unknown envi-ronment into several sub-areas, in accordance with the loca-tions and sensing data of the mobile robots, to achieve a cooperative search. Fig. 1 illustrates the design concept of the dynamic dividing-area method. Each mobile robot that sequentially passes through three positions in an unknown environment creates a sub-area composed of three parts. Here, the size of a sub-area depends on the size and sensing capability of the mobile robot. Thus, its size depends on the area covered by a mobile robot and the number of recorded positions that are periodically updated.
The strategy for searching for an object in an unknown environment is to scatter the mobile robots throughout the area. Therefore, the cooperative search strategy must meet the requirements stated below.
• Each mobile robot knows its location and sub-area in the environment, as well as those of other mobile robots. All data are communicated using the 802.15.4 ZigBee wire-less sensor network.
• During the search, a mobile robot avoids entering the sub-areas that are already covered by other robots.
Moreover, the mobile robot avoids a collision with others.
• In case the sub-areas overlap, the mobile robots move towards unexplored areas to avoid such overlaps. • In case all the sub-areas do not overlap, the objective
search tasks are activated to enable all the mobile robots to randomly search for the target object within the unex-plored areas.
Accordingly, two group behaviors activated through the ZigBee wireless communication are developed. Specific details are presented below.
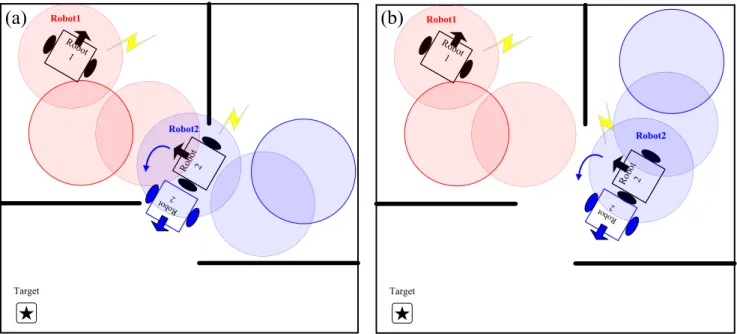
• Dynamic inter-robot avoidance. This group behavior is developed to allow a mobile robot to leave sub-areas that already belong to other mobile robots. Furthermore, the sub-area of the mobile robot cannot overlap with those of the other robots. As shown in Fig. 2a, a mobile robot with this behavior moves away upon determining that its sub-area overlaps with that of another mobile robot. • Dynamic robot wandering. This behavior allows a
mobile robot to randomly search for the target object in unexplored areas while simultaneously avoiding the entrance of other sub-areas. As shown in Fig. 2b, two mobile robots have been allocated to different areas. A mobile robot with this behavior is programmed to avoid a sub-area of another mobile robot and then randomly move to unexplored areas to search for the target object.
3.2 Description of the integrated framework for searching an object
Fig. 3 shows the framework that integrates the group and individual behaviors to control the mobile robot move-ments and achieve a cooperative search for an object in an unknown environment. Here, the ZigBee wireless sensor network transmits data, such as the locations and sub-areas of other mobile robots, as well as activating the group behaviors. The mobile robot sensors then detect the surrounding condi-tions and activate individual behaviors. The image sensor detects the color of the target object, the laser range finder and ultrasonic sensors detect obstacles, and the electric compass detects the heading angle of the mobile robot. All behaviors are simultaneously executed. However, the output of the inte-grated framework that finally controls the mobile robot depends on the priority of all behaviors. For instance, as shown in Fig. 3, in case a mobile robot moves and wanders due to nearby obstacles, the integrated framework selects the behavior “obstacle avoidance,” which has higher priority than the behavior “wandering,” to be performed by the motion control system of the mobile robot. The highest priority in the integrated framework is given to the behavior of finding the object, which is the main goal of the task. The behavior of obstacle avoidance is given the second priority. Scattering the
Target Robot 1 Robot 2 Robot3 R Robot 1 Robot 2 R 2 Robot3 Current (X,Y) Previous (X,Y) Previous (X,Y) Previous (X,Y) Previous (X,Y) Current (X,Y) Previous (X,Y) Previous (X,Y) Current (X,Y)
mobile robots throughout the environment is achieved by providing the behavior of dynamic robot wandering as the third priority, and the behavior of dynamic inter-robot avoid-ance as the fourth priority. When the target object cannot be found until a certain point of time and does not meet any obstacles, as in the case when all mobile robots are already allocated to different areas, the lowest priority behavior of wandering is implemented to search for the target object. Fig. 3 also shows the priority of behaviors, with 1 as the highest priority and 5 as the lowest priority of the integrated framework.
3.3 Simulation results
The feasibility of the developed cooperative search strategy with group and individual behaviors are verified in three test environments shown in Fig. 4, wherein the distrib-uted mobile robots cooperate in the objective search tasks. All the test environments have a size of 350 cm¥ 350 cm; however, different layouts and obstacles (of varying shapes and sizes) are installed to validate the developed approaches in different environments. All mobile robots are assumed to have the same motion velocities as they move in the test
Target Robot 1 Robot 2 Robot 1 Robot 2 Robot Robot 2 Robot2 Robot1 Target Robot 1 Robot 2 Robot 1 Robot 2 ot Robot 2 Robot2 Robot1
(a) (b)
Fig. 2. Group behaviors while searching for an object in an unknown environment. (a) Behavior of dynamic inter-robot avoidance. (b) Behavior of dynamic robot wandering.
environments. This simulation also analyzes the cooperative search efficiency in terms of different numbers of mobile robots. Each cooperative search task is executed 20 times to obtain an average search time.
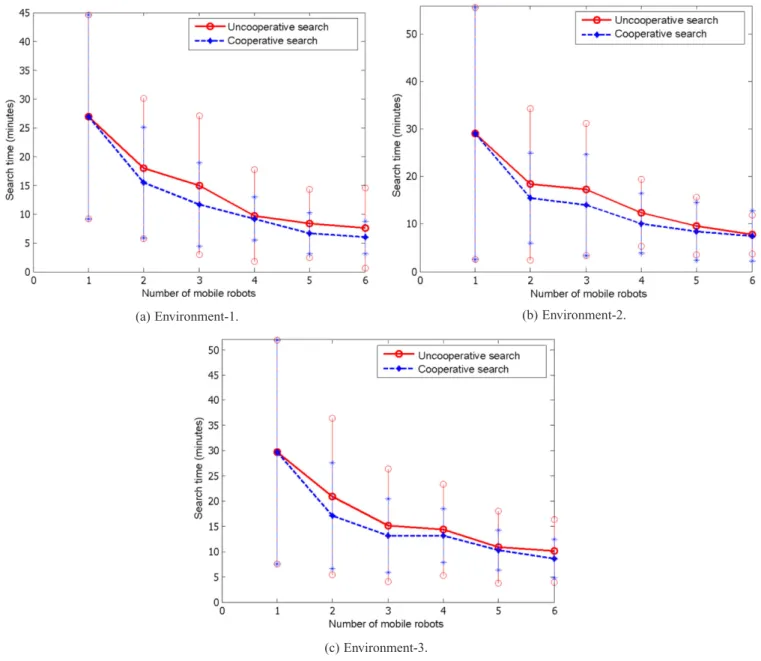
Fig. 5 shows the simulation results, and Table I lists the search time for the cooperative objective search in the differ-ent test environmdiffer-ents. An increase in the number of mobile robots significantly decreases the search time. The best reduc-tion rates are 78.07% for the cooperative search strategy with group and individual behaviors and 73.20% for the uncoop-erative search strategy without group behaviors. Moreover, the cooperative search strategy results in a relatively short search time, on average, compared with the uncooperative search strategy. The best rate of reduction is 22.67% (for searching the target object in the test “Environment-1” using three mobile robots). Standard deviation indicates the search time repeatability when the mobile robots execute multiple search tasks. As can be seen in Fig. 5, an increased number of mobile robots decreases the value of standard deviation. Moreover, compared with the uncooperative search strategy, the developed search strategy significantly reduces the stand-ard deviation of the search time. Furthermore, the search efficiency significantly improves with three mobile robots executing the cooperative search strategy, achieving an 18.30% average rate of reduction. However, the search effi-ciency improvement becomes limited when using more than three mobile robots. Moreover, six mobile robots achieved a
13.69% average rate of reduction. Therefore, three mobile robots could sufficiently execute the developed cooperative search tasks in the given test environments. The developed cooperative search strategy with group and individual behav-iors is, therefore, feasible and can significantly improve search efficiency.
IV. EXPERIMENTS
4.1 Experimental setup: a distributed mobile robot system
Three mobile robots were developed to realize a distrib-uted mobile robot system, as shown in Fig. 6. In this paper, the hardware architecture was separated into an upper layer and a lower layer as shown in Fig. 7 . The image processing method and wireless transmission were implemented in the upper layer. Image processing was implemented using a high-performance digital signal processor (DSP) manufactured by Texas Instruments (TI, Dallas, TX, USA). The TI DSP TMS320F6437 has advantages such as small size, light weight, and low power consumption. A CCD camera was used as an image sensor to capture images. Image processing was also implemented using a laptop personal computer (PC). An Eee PC manufactured by ASUS and an IBM PC were used for the different-sized mobile robots. Webcams mounted on the mobile robots also served as the image sensors. Table II
Fig. 4. Test environments used in the simulation.
(a) Environment-1. (b) Environment-2. (c) Environment-3.
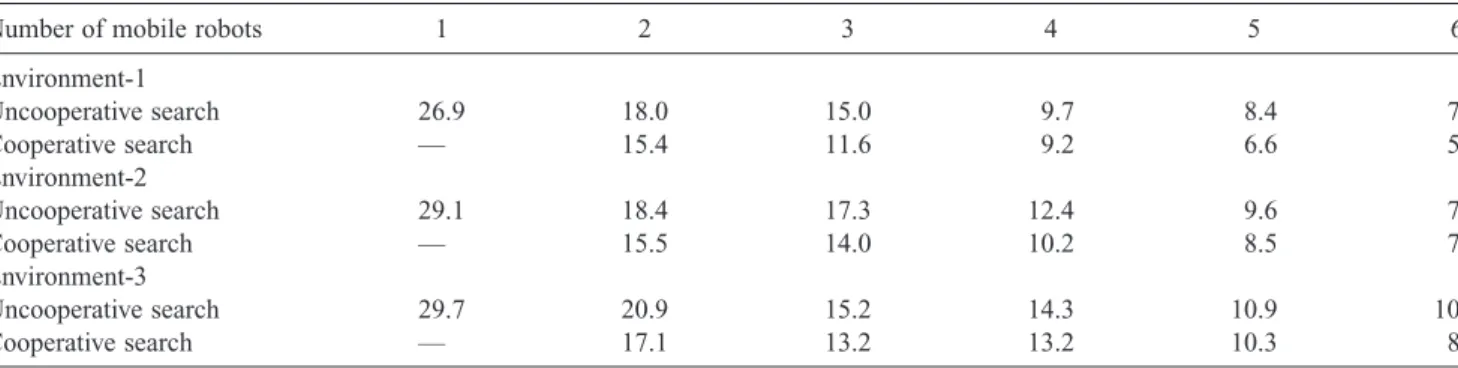
Table I. Time for searching the target object in different environments (unit: minutes).
Number of mobile robots 1 2 3 4 5 6
Environment-1 Uncooperative search 26.9 18.0 15.0 9.7 8.4 7.6 Cooperative search — 15.4 11.6 9.2 6.6 5.9 Environment-2 Uncooperative search 29.1 18.4 17.3 12.4 9.6 7.8 Cooperative search — 15.5 14.0 10.2 8.5 7.5 Environment-3 Uncooperative search 29.7 20.9 15.2 14.3 10.9 10.1 Cooperative search — 17.1 13.2 13.2 10.3 8.6
lists the central processing unit (CPU) and the sensors placed on each mobile robot.
The motion control law and the location estimation method were implemented in the lower layer. Here, a DSP-based motion control card with a high-performance TI TMS320F2812 DSP was used as an interface to control the DC servomotor packs with a sampling period of 1.0 ms. Velocity commands were transmitted to the amplifier of a DC servomotor pack through a 12-bit D/A converter installed on the DSP-based motion control card. A rotary incremental encoder was directly coupled to the DC motor of a servomo-tor pack, and the generated encoder signals that indicate the angular positions of the motor were received through a 32-bit decoder implemented on the DSP-based motion control card.
Fig. 5. Simulation results for cooperatively searching an object in unknown environments.
(a) Environment-1. (b) Environment-2.
(c) Environment-3.
Angular velocity was computed by differentiating the angular position over a sampling period. A 12-bit A/D converter implemented on the DSP-based motion control card received analog signals, such as the armature current detected by a Hall sensor from the servomotor packs.
Local and global networks were used in the applied distributed mobile robots for communication purposes. The local network system, which was implemented by using CAN-bus, transmitted sensing data and control signals between the upper and lower layers in a mobile robot. The global network system, which was implemented using an 802.15.4 ZigBee wireless sensor network, transmitted data between the mobile robots. The ZigBee modules used in this paper were SmartRF04 and CC2430DB as shown in Fig. 8. The SmartRF04 module was used as a reference node, and the CC2430DB module was mounted on the mobile robot as a moving node. MATLABsoftware facilitated the development of the proposed approaches.
4.2 Experimental results
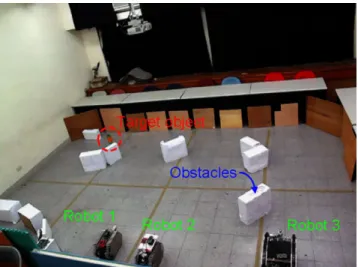
The test environment had a size of 400 cm¥ 600 cm and had randomly installed white obstacles of different sizes and one red target object to be searched behind the obstacles as shown in Fig. 9. The mobile robots shown in Fig. 6 execute the objective search tasks by using the cooperative search strategy (with group and individual behaviors) and the unco-operative search strategy (without the counco-operative search strategy and group behaviors). This experiment considered the cooperative search efficiency by using mobile robots 1 to 3. Each search task was executed six times to obtain the average search time.
Fig. 10 shows the experimental results for searching the target object in the test environment shown in Fig. 9. Here, the cooperative search strategy and the group behaviors
Fig. 7. Communication architecture and functions developed on multiple robots.
Table II. CPU and sensors equipped on mobile robots.
Robot 1 Robot 2 Robot 3
CPU TI DSP TMS320F6437 Eee PC IBM PC Sensors CCD camera Ultrasonic sensors Electric compass Webcam Ultrasonic sensors Electric compass Webcam
Laser range finder Electric compass
Fig. 8. ZigBee modules used in this paper.
developed for unknown environments, as shown in Fig. 3, control the motions of the distributed mobile robots. The experimental results demonstrate a similar search time trend with that observed in the simulation results shown in Fig. 5 and Table I. An increase in the number of mobile robots decreases the search time, as shown in Fig. 10b. The rate of reduction achieved in this paper is 50.62% for the uncoop-erative search strategy and 55.56% for the coopuncoop-erative search strategy using three mobile robots. Moreover, the cooperative search strategy can further reduce the average search time compared with that of the uncooperative search strategy. The rate of reduction achieved in this paper is 31.15% (using two mobile robots in the search) and 10.00% (using three mobile robots). Fig. 10a also indicates that an increase in the number of mobile robots decreases the variance of search time for both search strategies. Moreover, compared with the uncoop-erative search strategy, the developed coopuncoop-erative search strategy and group behaviors significantly reduce the search time variance. Hence, the use of two mobile robots for the cooperative search strategy reduces the search time signifi-cantly at 48.15% rate of reduction. However, the search time improvement is limited when three mobile robots are used, achieving only a 14.29% rate of reduction. Therefore, two mobile robots could execute the developed cooperative search tasks sufficiently for the given test environment. The coop-erative search strategy with the group and individual behav-iors developed in this paper is feasible and can significantly improve search efficiency. The experimental results validate those of the simulations, as shown in Fig. 5 and Table I, with respect to the practical considerations.
V. CONCLUSIONS
A cooperative search strategy has been developed using the behavior-based control framework that includes
individual and group behaviors for distributed mobile robots aimed at achieving efficient and autonomous objective search tasks in unknown environments. In this paper, the individual behaviors of each mobile robot serve as fundamental func-tions for autonomous search while avoiding obstacles. The individual behaviors developed, including those of finding an object, obstacle avoidance, and of wandering, are activated according to the sensing information obtained from the mobile robots. Group behaviors are also created to serve additional functions of cooperative search among the mobile robots. The group behaviors are activated through an 802.15.4 ZigBee wireless sensor network and are found to be depend-ent on the cooperative search strategy.
Fig. 9. Test environment.
Fig. 10. Experimental results using the search strategy for unknown environments.
(a) Measurement of search time.
In case a search environment is completely unknown, the cooperative search strategy dynamically divides the unknown environment into several sub-areas according to the locations and the sensing data of the mobile robots. This enables the scattering of mobile robots over the environment and coopera-tive search for the target object. Here, the 802.15.4 ZigBee wireless sensor network communicates the location and sensing data of each mobile robot to others. According to the developed cooperative search strategy, this paper develops two group behaviors, namely, the dynamic inter-robot avoidance and the dynamic robot wandering, to control the group motions of the mobile robots. By integrating the individual and group behaviors, distributed mobile robots cooperatively search for the target object in an unknown environment. Several simulations and experiments demonstrate the feasibil-ity of the developed cooperative search strategy with the group and the individual behaviors. The average search time is also reduced compared with that achieved by applying the uncoop-erative search strategy. The best rate of reduction is 22.67% (based on the simulation) and 31.15% (based on the experi-ment). Furthermore, this paper has determined the adequate number of mobile robots required to execute the developed cooperative search strategy in the test environments, validating the feasibility of the cooperative search strategy with group and individual behaviors.
REFERENCES
1. Dedeoglu, G. and G. S. Sukhatme, “Modular behaviors in heterogeneous groups of mobile robots,” Proc. SPIE— Int. Soc. Optical Engineering, pp. 477–484 (2000). 2. Grabowski, R., L. E. Navarro-Serment, C. J. J. Paredis,
and P. K. Khosla, “Heterogeneous Teams of Modular Robots for Mapping and Exploration,” Auton. Robot., Vol. 8, No. 3, pp. 293–308 (2000).
3. Nevatia, Y., T. Stoyanov, R. Rathnam, M. Pfingsthorn, S. Markov, R. Ambrus, and A. Birk, “Augmented Autonomy: Improving human-robot team performance in Urban Search and Rescue,” Proc. 2008 IEEE/RSJ Int. Conf. Intell. Robots Syst., pp. 2103–2108 (2008). 4. Shiroma, N., Y. U. H. Chiu, N. Sato, and F. Matsuno,
“Cooperative task execution of a search and rescue mission by a multi-robot team,” Adv. Robot., Vol. 19, No. 3, pp. 311–329 (2005).
5. Trevai, C., J. Ota, and T. Arai, “Multiple mobile robot surveillance in unknown environments,” Adv. Robot., Vol. 21, No. 7, pp. 729–749 (2007).
6. Arkin, R. C., “Cooperation without communication: Multiagent schema-based robot navigation,” J. Robot. Syst., Vol. 9, No. 3, pp. 351–364 (1992).
7. Balch, T. and R. C. Arkin, “Communication in reactive multiagent robotic systems,” Auton. Robot., Vol. 1, No. 1, pp. 27–52 (1994).
8. Helmbold, D. P. and C. E. McDowell, “Modeling speedup (n) greater than n,” IEEE Trans. Parallel Distrib. Syst., Vol. 1, No. 2, pp. 250–256 (1990).
9. Moorehead, S. J., R. Simmons, and W. L. Whittaker, “Autonomous Exploration Using Multiple Sources of Information,” Proc. 2001 IEEE Int. Conf. Robotics Autom., pp. 3098–3103 (2001).
10. Burgard, W., M. Moors, C. Stachniss, and F. E. Schnei-der, “Coordinated multi-robot exploration,” IEEE Trans. Robot., Vol. 21, No. 3, pp. 376–386 (2005).
11. Hayes, A. T., A. Martinoli, and R. M. Goodman, “Com-paring distributed exploration strategies with simulated and real robots,” Proc. Fifth Int. Symp. Distrib. Auton. Robotic Syst., pp. 261–270 (2000).
12. Mataric, M. J., “Minimizing complexity in controlling a mobile robot population,” Proc. IEEE Int. Conf. Robotics Autom., pp. 830–835 (1992).
13. Rybski, P. E., A. Larson, H. Veeraraghavan, M. Anderson, and M. Gini, “Performance evaluation of a multi-robot search & retrieval system: Experiences with MinDART,” J. Intell. Robot. Syst.: Theory Applicat., Vol. 52, No. 3–4, pp. 363–387 (2008).
14. Jian, Y. L., F. L. Lian, and H. T. Lee, “Deployment of a team of biomlmetic searching agents based on limited communication quantity,” Asian J. Control, Vol. 10, No. 4, pp. 439–448 (2008).
15. Mostofi, Y. and R. M. Murray, “Communication and sensing trade-offs in cooperative mobile networks,” Asian J. Control, Vol. 10, No. 2, pp. 156–170 (2008).
16. Mataric, M. J., “Issues and approaches in the design of collective autonomous agents,” Robot. Auton. Syst., Vol. 16, No. 2–4, pp. 321–331 (1995).
17. Pack, D. J. and B. E. Mullins, “Toward finding an univer-sal search algorithm for swarm robots,” Proc. IEEE Int. Conf. Intell. Robots Syst., pp. 1945–1950 (2003). 18. Sugawara, K. and M. Sano, “Cooperative acceleration
of task performance: Foraging behavior of interacting multi-robots system,” Physica D., Vol. 100, No. 3–4, pp. 343–354 (1997).
19. Rybski, P. E., S. A. Stoeter, M. Gini, D. F. Hougen, and N. P. Papanikolopoulos, “Performance of a distributed robotic system using shared communications channels,” IEEE Trans. Robot. Autom., Vol. 18, No. 5, pp. 713–727 (2002).
20. Hackwood, S. and G. Beni, “Self-organisation of sensors for swarm intelligence,” Proc. IEEE Int. Conf. Robotics Autom., pp. 819–829 (1992).
21. Payton, D., M. Daily, R. Estowski, M. Howard, and C. Lee, “Pheromone robotics,” Auton. Robot., Vol. 11, No. 3, pp. 319–324 (2001).
22. Wagner, I. A., M. Lindenbaum, and A. M. Bruckstein, “Distributed covering by ant-robots using evaporating
traces,” IEEE Trans. Robot. Autom., Vol. 15, No. 5, pp. 918–933 (1999).
23. Brooks, R.A., “A robust layered control system for a mobile robot,” IEEE J. Robot. Autom., Vol. 2, No. 1, pp. 14–23 (1986).
24. Siegwart, R. and I. R. Nourbakhsh, Introduction to autonomous mobile robots, The MIT Press, Cambridge (2004).
25. Anderson, M. and N. Papanikolopoulos, “Improving multirobot, cooperative search via local target queues,” Proc. 2007 IEEE/RSJ Int. Conf. Intell. Robots Syst., pp. 2590–2595 (2007).
26. Cheng, C. K. and G. Leng, “Cooperative Search Algo-rithm for Distributed Autonomous Robots,” Proc. 2004 IEEE/RSJ Int. Conf. Intell. Robots Syst., pp. 394–399 (2004).
27. Khoo, A. and I. D. Horswill, “An efficient coordination architecture for autonomous robot teams,” Proc. IEEE Int. Conf. Robotics Autom., pp. 287–292 (2002). 28. Loh, J., J. Heng, G. Seet, and S. K. Sim, “Behavior-based
search using small autonomous mobile robot vehicles,” Proc. Int. Conf. Knowledge-Based Intell. Electron. Syst., pp. 294–301 (1998).
29. Yilma, B. and M. A. Seif, “Behavior-based artificial intelligence in miniature mobile robot,” Mechatronics, Vol. 9, No. 2, pp. 185–206 (1999).
30. Gage, D. W., “Randomized search strategies with imper-fect sensors,” Proc. SPIE—Int. Soc. Optical Eng., pp. 270–279 (1994).
31. Howard, A., M. J. Mataric, and G. S. Sukhatme, “An incremental self-deployment algorithm for mobile sensor networks,” Auton. Robot., Vol. 13, No. 2, pp. 113–126 (2002).
32. Jung, D. and A. Zelinsky, “An architecture for distributed cooperative planning in a behavior-based multi-robot system,” Robot. Auton. Syst., Vol. 26, No. 2–3, pp. 149– 174 (1999).
33. Joho, D. and W. Burgard, “Searching for objects: Combining multiple cues to object locations using a maximum entropy model,” Proc. 2010 IEEE Int. Conf. Robotics Autom., pp. 723–728 (2010).
34. Joho, D., M. Senk, and W. Burgard, “Learning search heuristics for finding objects in structured environ-ments,” Robot. Auton. Syst., Vol. 59, No. 5, pp. 319–328 (2011).
35. Wang, Y. and I. I. Hussein, “Bayesian-based domain search using multiple autonomous vehicles with
intermittent information sharing,” Asian J. Control, Vol. 15, No. 4, pp. 1–10 (2013).
Tzu-Chiang Shih received B.S. degree from Tamkang University, Taiwan in 2007, and M.S. degree from National Chiao-Tung University, Taiwan in 2009. He is currently an engineer at Leader Automation Co., LTD., Taiwan. His research interests include behavior-based robot control, ZigBee com-munication, and autonomous mobile robot.
Syh-Shiuh Yeh received B.S. degree in mechanical engineering, M.S. and Ph.D. degrees in Electrical and Control Engineer-ing from National Chiao Tung University, Taiwan, in 1994, 1996, and 2000, respec-tively. He was a researcher at Mechanical Industry Research Laboratory, Industrial Technology Research Institute. He is currently an associate professor at Department of Mechanical Engineering, National Taipei University of Technology. His research inter-ests include mobile robotics, human-machine interaction, and multi-axis motion control. He is a member of IEEE, Chinese Automatic Control Society, and Chinese Society of Mechani-cal Engineers.
Pau-Lo Hsu (M’91) received B.S. degree from National Cheng Kung University, Taiwan, M.S. degree from University of Delaware, and Ph.D. degree from Univer-sity of Wisconsin-Madison, in 1978, 1984, and 1987, respectively, all in mechanical engineering. Following two years of mili-tary service in King-Men, he was with San-Yang (Honda) Industry during 1980–1981 and Sandvik (Taiwan) during 1981–1982. In 1988, he joined Department of Electrical and Control Engineering, National Chiao Tung University, Hsinchu, Taiwan, as Associate Professor. He became Profes-sor in 1995. During 1998–2000, he served as Chairman of the department. He was elected as President of the Chinese Auto-matic Control Society in 2001–2002. His research interests include mechantronics, CNC motion control, servo systems, and network control systems.