國 立 交 通 大 學
機 械 工 程 研 究 所
碩士論文
變壓耦合式電漿製程設備之蝕刻率批片控制
Wafer to wafer control of etching rate in Transformer
Coupled Plasma Processing Equipment
研 究 生:廖 木 生
指導教授:林 家 瑞 博士
變壓耦合式電漿製程設備之蝕刻率批片控制
Wafer to wafer control of etching rate and uniformity in Transformer Coupled Plasma Processing Equipment
研究生:廖木生 Student:Mu sheng Liao
指導教授:林家瑞 博士 Advisor:Prof. Chia-shui Lin
國 立 交 通 大 學 機械工程研究所
碩 士 論 文
A Thesis
Submitted to Institute of Mechanical Engineering Collage of Engineering
National Chiao Tung University in Partial Fulfillment of Requirement
for the Degree of Master of Science
in
Mechanical Engineering June 2005
HsinChu, Taiwan, Republic of China
變壓耦合式電漿製程設備之蝕刻率批片控制
研究生:廖木生 指導教授:林家瑞 博士國立交通學機械工程學系碩士班
摘要
電漿技術在半導體製程中廣泛被應用,例如乾蝕刻、薄膜沈積、 去光阻等等都與電漿技術相關。隨著半導體工業的技術的進步積體電 路的尺寸越做越小,所以蝕刻製程是否能精準完成微影中預定圖案轉 移,為一個重要的製程。本論文中在 Lam TCP 9400SE 機台內使用氯 氣來進行多晶矽蝕刻(Poly silicon),利用田口式實驗法建立電漿 蝕刻機制的實驗模型,研究其蝕刻率、均勻度、電子密度、電子碰撞 頻率與電漿蝕刻設備參數的關係。電漿蝕刻設備參數有電漿功率、偏 壓功率、腔體壓力、氣體流量等等。在實驗模型基礎上,利用類神經 控制器與鑑別器來做蝕刻率控制的模擬並評估其效果。Wafer to wafer control of etching rate in Transformer
Coupled Plasma Processing Equipment
Student:Mu sheng Liao Advisor:Prof. Chia-shui Lin
Institute of Mechanical Engineering National Chiao Tung University
Abstract
Plasma technology is widely used in the semiconductor processing, such as dry etching、thin film deposition、PR stripper etc. By technology evolution of the semiconductor industry, the size of the integrated circuit becomes smaller and smaller. It is important that the plasma etch process can transfer circuit pattern accurately to the wafer after photolithography. In this study, we use chlorine to etch poly silicon in Lam TCP 9400SE. We use Taguchi method to establish model of plasma etching mechanism to find relationship between etching rate、uniformity、electron density、 electron collision rate and parameter of plasma etching equipment which includes source power、bias power、chamber pressure、gas flow etc. Based on the empirical model, neural network controller and identifier are used to control etching rate. The performance of controller will be evaluated and discussed based on simulation results.
致謝
在碩士班求學過程中,感謝指導教授林家瑞博士細心教導,使我 瞭解如何做研究的方法與精神 。感謝陳宗麟博士與呂宗熙博士在論 文口試時的建議與指導使本論文中更加完善,感謝 NDL 與 NDL 工程 師許慶龍先生對實驗的幫助,進而順利完成碩士論文的研究。 在研究所求學期間感謝每一門開課的老師,因為你們的用心教學 與指導使我瞭解更多方面的知識。感謝我的朋友們與實驗室學弟以及 其他實驗室同學,讓我在研究生活中多了許多幫助與樂趣,謝謝你們。 最後感謝我的家人在研究所求學過程中給我的鼓勵與支持,因為 有你們的幫忙使我能夠順利完成碩士論文,在此祝福我的家人順利平 安 。目錄 中文摘要---I 英文摘要---II 致謝---III 目錄---Ⅳ 表目錄---Ⅵ 圖目錄---Ⅷ 第一章 緒論---1 1-1 前言---1 1-2 文獻回顧---4 第二章 電漿蝕刻機制與應用---8 2-1 電漿簡介---8 2-1-1 電漿的產生---8 2-1-2 電漿蝕刻機制---9 2-2 電容耦合式電漿源---12 2-3 變壓耦合式電漿源---12 第三章 實驗設計---14 3-1 田口式實驗法---14 3-1-1 因子效果估計---15
3-1-2 變異數分析表---15 3-1-3 驗證實驗---16 3-2 實驗儀器---18 3-3 實驗分析討論---20 3-3-1 蝕刻率實驗分析---20 3-3-2 均勻度實驗分析---22 3-3-3 電子密度實驗分析---22 3-3-4 電子碰撞率分析---23 第四章 倒傳遞類神經網路控制器設計---25 4-1 類神經網路---25 4-2 倒傳遞類神經網路---25 4-2-1 倒傳遞網路演算法---26 4-3 類神經網路蝕刻率模型建立---30 4-4 控制器的設計---32 4-5 控制器的模擬與討論---33 4-5-1 類神經網路鑑別器與控制器參數---33 4-5-2 類神經網路鑑別器與控制器於實際製程模擬---35 第五章結論與未來展望---38 參考文獻---40
表目錄
表 3-1 田口式直交表 L9( )---43 4 3 表 3-2 因子效果估計表---43 表 3-3 變異數分析表---43 表 3-4 實驗規劃表---44 表 3-5 實驗參數範圍---44 表 3-6 蝕刻率實驗配置和 SN 比---44 表 3-7 蝕刻率因子效果估計表---45 表 3-8 蝕刻率變異數分析表---45 表 3-9 蝕刻率預測誤差及驗證---45 表 3-10 均勻度實驗配置和 SN 比---46 表 3-11 均勻度因子效果估計表---46 表 3-12 均勻度變異數分析表---46 表 3-13 均勻度預測誤差及驗證---47 表 3-14 電子密度實驗配置和 SN 比---47 表 3-15 電子密度因子效果估計表---47 表 3-16 電子密度變異數分析表---48 表 3-17 電子密度預測誤差及驗證---48 表 3-18 電子碰撞率實驗配置和 SN 比---48表 3-19 電子碰撞率因子效果估計表---49 表 3-20 電子碰撞率變異數分析表---49 表 3-21 電子碰撞率預測誤差及驗證---49 表 4-1 訓練樣本---50 表 4-2 測試樣本---51 表 4-3 類神經網路標準偏差---51 表 4-4 測試樣本預測值與實際值---52 表 4-5 蝕刻率之中心操作點---52
圖目錄
圖 1-1 等向性蝕刻---53 圖 1-2 非等向性蝕刻---53 圖 2-1 變壓耦合式電漿源---53 圖 3-1 Lam TCP 9400SE 機台---54 圖 3-2 ASI Hercules 裝置---54 圖 3-3 自激發電子電漿共振儀(SEERS)---55 圖 3-4 晶圓量測位置---55 圖 3-5 蝕刻率個別因子效果圖---56 圖 3-6 蝕刻率因子效果圖---56 圖 3-7 均勻度個別因子效果圖---57 圖 3-8 均勻度因子效果圖---57 圖 3-9 電子密度個別因子效果圖---58 圖 3-10 電子密度因子效果圖---58 圖 3-11 電子碰撞率個別因子效果圖---59 圖 3-12 電子碰撞率因子效果圖---59 圖 4-1 倒傳遞類神經網路---60 圖 4-2 雙彎曲函數---60 圖 4-3 倒傳遞類神經流程圖---61圖 4-4 蝕刻率之預測值與實際值---62 圖 4-5 電漿功率與偏壓功率之蝕刻率三維圖---62 圖 4-6 電漿功率與氯氣流量之蝕刻率三維圖---63 圖 4-7 電漿功率與壓力之蝕刻率三維圖---63 圖 4-8 偏壓功率與腔體壓力之蝕刻率三維圖---64 圖 4-9 偏壓功率與氯氣流量之蝕刻率三維圖---64 圖 4-10 腔體壓力與氯氣流量之蝕刻率三維圖---65 圖 4-11 類神經網路控制器---65 圖 4-12 類神經網路鑑別器與控制器的參數比較---66 圖 4-13 電漿蝕刻製程輸出---66 圖 4-14 電漿蝕刻製程輸出受飄移的干擾---67 圖 4-15 飄移干擾下之類神經網路控制器
α
=0.4---67 圖 4-16 電漿蝕刻製程的輸入功率---68 圖 4-17 飄移干擾下之類神經網路控制器α
=0.7---68 圖 4-18 飄移干擾下之類神經網路控制器 1-1-4---69 圖 4-19 飄移干擾下之類神經網路控制器 1-5-4---69 圖 4-20 電漿蝕刻製程輸出受偏移的干擾---70 圖 4-21 偏移干擾下之類神經網路控制器η
=5---70 圖 4-22 電漿蝕刻製程的輸入功率η
=5---71圖 4-23 偏移干擾下之類神經網路控制器
η
= 40---71圖 4-24 電漿蝕刻製程的輸入功率
η
= 40---72圖 4-25 飄移干擾下之類神經網路控制器---72
第一章 緒論
1-1 前言 電漿是物質在固、液、氣三態之外,存在的第四種型態。電漿 本體是由一群游離化帶電粒子所組成,其中任何一個帶電粒子與其最 接近的粒子間的電位差遠小於本身具有的動能。製程用電漿為部分離 子化的氣體,由帶電的電子與離子以及不帶電的中性氣體分子所組 成,宏觀來說,電漿是以上三部分所構成的準中性氣體。 電漿因其在材料處理上的特性,在半導體製程上扮演重要的角 色 : 如 濺 鍍 ( Sputtering )、 物 理 氣 相 沈 積 ( Physical VaporDeposition,PVD)、電漿輔助化學沈積(Plasma Enhanced Chemical
Vapor Deposition,PECVD)、乾蝕刻(Dry Etching)、表面清洗(Surface
Cleaning)等皆有應用,尤其在線寬越來越精細的製程需求下,具備 高均勻度、高效率的電漿源才能符合製程需求。隨著半導體工業的技 術的進步積體電路的尺寸越做越小,所以蝕刻製程是否能精準完成微 影中預定圖案轉移,為一個重要的過程。早期蝕刻都是採用濕式蝕刻 (wet etch)。它是利用薄膜與特定的溶液間所進行的化學反應來去 除未被光阻覆蓋的薄膜。優點是製程簡單、且蝕刻速率快,因為利用 化學反應來進行薄膜的去除,化學反應沒有特定的方向性,所以會產 生等向性蝕刻(Isotropic)如圖 1-1,造成不正確圖案的轉移,當元
件尺寸越小就會有很大的影響,於是使用乾式蝕刻(dry etch)來取 代。乾式蝕刻是利用電漿來進行薄膜的蝕刻,其最大優點是具有非等 向性蝕刻(Anisotropic)如圖 1-2,因此如何使垂直速率大於側向蝕 刻速率,以便蝕刻後的圖案與光罩相同,並減少底切(Undercut)現 象。因為乾蝕刻非等向性是利用粒子轟擊的物理現象來進行,所以其 選擇性(Selectivity)就比濕蝕刻還來的差。除了非等向性蝕刻與選 擇 性 之 外 , 還 需 考 慮 蝕 刻 速 率 (Etching rate) 及 均 勻 性 (Uniformity)。乾蝕刻蝕刻速率越快,表示產量越大,蝕刻均勻性越 高,代表晶圓品質的控制越完善,晶圓良率(Yield)也越好。因此如 何將電漿蝕刻設備產生最好的蝕刻率以及均勻性,並降低成本、提高 產品精密度便是當前重要的研究課題。 一般常見乾式蝕刻技術有:電子迴旋共振(Electron cyclotron Resonance)、活性離子蝕刻(Reactive Etching)、感應耦合式電漿 (Inductively Coupled Plasma) 或 變 壓 耦 合 式 電 漿 (Transformer Coupled Plasma),這次研究是採用變壓耦合式電漿蝕刻系統。變壓 耦合式電漿蝕刻系統具有高電漿密度、低操作壓力、低離子能量、DC bias 可控制等優點,對於蝕刻製程中能夠提供一般傳統蝕刻系統更 高蝕刻速率與非等向性,來達成蝕刻後的品質要求。
多晶矽產生化學反應,增強蝕刻能力。架構共分為五章,第一章序論 說明電漿在半導體上應用極為廣泛的必要性﹔第二章是電漿產生基 本原理,對於整個電漿系統作一簡述,其中包含說明電漿生成機制、 蝕刻原理及電容耦合式電漿源 (capacitive coupled plasma)與變壓 耦合式電漿源(Transformer Coupled Plasma,TCP )比較兩著的優 劣與特性﹔第三章利用實驗設計法與實驗流程並由實驗中找出電漿 功率、偏壓功率、腔體壓力、氯氣流量與蝕刻率、均勻度、電子密度、 電子碰撞頻率的關係;第四章是先對類神經網路作個簡介,並以類神 經網路控制器控制蝕刻率﹔第五章則為對整個論文內容做一總結與 對未來工作的展望。
1-2 文獻回顧
電漿模擬的發展從 1980 年代早期開始,最初是探討氟化合物電 漿化學(Fluorocarbon Plasma Chemistry)問題,到了 1980 年代中 期,使用一維流體模式模擬電容式射頻電漿源(Capacitive Coupled Plasma,CCP)陸續被發表出來,1980 年代晚期至 1990 年代初期, 主要是利用一維模式模擬複雜的電漿物理機制及相關化學反應。近年 來,由於電腦的高速開發,電腦運算能力大大的增加,利用二維或三 維模式來模擬平行板反應性離子蝕刻電漿源(Reactive Ion Etch, RIE )、 電 漿 輔 助 化 學 氣 相 沈 積 電 漿 源 。 而 電 子 迴 旋 共 振 電 漿 源 ( Electron Cyclotron Resonance , ECR ) 及 電 感 耦 合 式 電 漿 源 (Inductively Coupled Plasma,ICP)的模擬,不但可以輔助電漿 源之設計與開發,也可更加精準的瞭解電漿腔體(chamber)內之電 漿 狀 況 與 特 性 。 在 二 維 電 漿 模 擬 方 面 , 1994 年 R.A.Stewart , P.Vitello 與 D.B.Graves 發展了一個二維流體模式電感式電漿源模 擬程式【1】。在此模擬中使用簡化流體模型,假設離子溫度不隨腔體 位置的不同而改變,利用各粒子的連續方程式、動量守恆方程式以及 電子能量守恆方程式,模擬出電漿腔體中電子密度、離子密度以及電 子溫度的分佈。在 1994 年 Peter L.G. Ventzek、Robert J. Hoekstra
模擬粒子間的關係來架構出整個電漿模型。
1991 年,Gary S.May、Jiahua Huang 與 Costa J.Spanos【3】 針對 Lam Research Corporation Autoetch 4900,利用因子設計法 來建立出蝕刻率、均勻度、二氧化矽選擇比和光阻選擇比的迴歸方程 式 的 模 型 。 實 驗 輸 入 有 電 漿 功 率 、 壓 力 、 Electrode spacing 、 CCl4/He/O2 流量,經由這些迴歸方程式可以判斷每個實驗輸入參數 影響輸出參數的重要性,並可預測不同輸入下所的到的實驗結果。電 漿蝕刻是一種複雜的非線性系統包括物理性與化學性的反應,如果要 用選擇適當的迴歸方程式來預測電漿蝕刻是非常困難的,如果利用類 神經來建立蝕刻模型。1993 年,Himmel 與 Gary S.May【4】以類神 經網路來建立電漿蝕刻模型,並與統計製程的方法來做比較 。由文 中可得知利用類神經網路所建立出的蝕刻率、均勻性、和選擇比都比 統計的方法更加的準確,進而開始探討類神經的網路架構的最佳化。 1994 年,ByungWhan Kimo 與 Gary S.May【5】尋找最佳化類神經網 來建立電漿蝕刻系統模型,類神經網路架構為 3 層包含輸入層、隱藏 層和輸出層,針對不同的學習速率和預測性及訓練時間進行比較,建 立出最接近實際電漿蝕刻系統。
2000 年,David Stokes 和 Gary S.May【6】提出一種即時類神 經控制器應用在活性離子蝕刻(Reactive Ion Etching)系統,輸入參
數為電漿功率、腔體壓力、 混合氣體流量來控制蝕刻率。類 神經網路採用 3 層利用各種不同的干擾來測試類神經網路控制器,結 果顯示類神經控制器能即時消除雜訊干擾回饋正確修正量並到達所 設定的蝕刻率。 2 3 2 / Cl BCl 2000 年,Partick【7】等人在變壓耦合式電漿源中偏壓控制的 研究。研究中顯示出,電漿功率、操作壓力、反應氣體組成成分對於 鞘層電位有耦合的關係,因此以輸入偏壓功率的開迴路控制無法達到 控制的理想蝕刻率,因此採用閉迴路控制實驗證明閉迴路設計不但可 以獨立控制離子能量,亦可對於不同之匹配電路、電容電阻不匹配等 狀況所造成蝕刻誤差加以補償。 2001 年,Cheng-Hung【8】等人利用 36 GHz 外差式毫微米波干 涉儀,以非接觸式方法量測氬氣的電子密度。文中控制架構是採用比 例 積 分 型 控 制 器 、 順 向 補 償 器 和 前 授 補 償 器 來 消 除 電 子 密 度 的 overshoot。依據 Ziegler-Nichols 法則設計一比例積分型控制器(PI
Controller),並以 為目標值進行控制器設計,經由實驗 獲得 和 分別為 0.72 及 1.15,最佳的取樣時間在.075 秒至 0.225 秒間,輸入為電漿功率輸出為電子密度,以改變氣壓作為干擾源印證 控制系統的效能。2003 年,Cheng-Hung 等人繼續討論電漿即時控制 問題在Cl 上之應用【9】輸入為電漿功率與偏壓功率,控制對象為電 3 11 10 7 . 1 × cm− p k
k
I漿中離子電流與離子密度,並討論開迴路與閉迴路控制狀況下對蝕刻 率的影響,實驗結果顯示在閉迴路狀況下,對於製程的穩定性有較佳 結果。
第二章 電漿蝕刻機制與應用
2-1 電漿簡介 2-1-1 電漿的產生 電漿是物質在固態、液態、氣態之外,所存在的第四種型態。 當氣體受到外加的能量,會使氣體分子解離而形成電漿。電漿是一種 由正電荷、負電荷以及中性氣體分子所構成的部分解離氣體,它是由 離子、電子、中性原子或分子所組成的,主要是靠粒子間的碰撞來產 生激發(Excitation)、解離性附著(Dissociative Attachment)、解 離(Dissociation)、離子化(Ionization)、再結合(Recombination) 反應形成電漿。粒子間的碰撞分為彈性碰撞及非彈性碰撞,由於電子 質量遠小於原子質量,所以電子與氣體分子之間的碰撞是屬於彈性碰 撞。但是隨著電子能量的增加,最後到達足夠的能量,進而使氣體分 子在碰撞後分離為離子及電子,因為有能量的散失所以氣體分子與電 子之間產生離子化的碰撞屬於非彈性碰撞。 用一個化學式來說明電漿產生過程,當電子獲得外來的能量成 為高能量電子時,撞擊到氣體分子有可能形成一正離子和電子,或者 是形成兩個中性自由基, e O O e* + 2 → 2+ +2 (2-1) e O O O e*+ 2 → + + (2-2)離子化的氣體在遇到電子時,可能產生復合(recombination)作用產 生中性自由基, O O e O e+ 2+ → + + + (2-3) O O O e+ 2+ → + (2-4) 除此之外,電子撞擊到氣體分子,有可能將能量轉移到氣體分子或是 中性自由基,使得分子或是自由基的能量轉為激發態,然後這些激發 態分子藉由釋出光能回到基態, * 2 2 O O e+ → (2-5) ν h O O → 2+ * 2 (2-6) * O O e+ → (2-7)
ν
h O O* → + (2-8) 如此週而復始反覆發生,解離分子與電子會快速增加最後形成電漿。 2-1-2 電漿蝕刻機制 蝕刻技術可分為乾蝕刻與濕蝕刻兩種。乾蝕刻(又稱電漿蝕刻) 是目前最常用的蝕刻方式,利用輝光放電的方式,產生包含離子、電 子、帶電粒子,以及具有高化學活性的原子團之電漿來進行蝕刻。 電漿蝕刻包含物理及化學兩部分,物理部分而言當電漿產生時電 子遷移率高於離子,使得電極間產生自我偏壓,負偏壓會使正離子加 速撞擊晶圓來移除圖案,另一部份是化學反應,當自由基經由擴散到達基材表面後,會吸附在基材表面上進行化學反應,形成揮發性分子 離開基材表面。 電漿的基本蝕刻機制分為下列幾種: (1) 離子濺擊蝕刻(Sputtering) 離子濺擊蝕刻可視為一種物理濺鍍方法,它是利用輝光放電使 氣體分子解離成正離子,受到電漿 sheath 影響加速濺擊基材表面, 將基材表面材料移除。此過程完全利用物理碰撞產生蝕刻機制稱之為 離子濺擊蝕刻。其特色有良好的方向性,可幾乎獲得垂直蝕刻輪廓, 缺點是以離子撞擊基材表面,會導致選擇性不好。
(2) 純化學性蝕刻(Pure Chemical Etching)
純化學反應蝕刻是利用電漿產生化學活性強的自由基,經由擴 散到達基材表面與基材反應產生揮發性生成物,再利用真空設備來抽 離腔體,其過程完全利用化學反應達成故稱之。這一種化學性反應蝕
刻機制是等向性的(無方向性),但選擇性好。
(3) 離子能量催化蝕刻(Ion Energy Driven Etching)
此過程反應包含蝕刻反應物及高能離子,電漿中高能量離子會 加強蝕刻反應,離子被電漿 sheath 加速,破壞晶圓表面上的原子結 構間的鍵結,加速基材表面化學反應,此過程比純化學性蝕刻為快。 (4) 抗蝕層離子蝕刻(Ion Enhanced Inhibitor Etching)
晶圓表面在蝕刻反應進行時,同時會有鈍化反應在進行,這些 反應生成物會覆蓋在晶圓表面阻止蝕刻反應物與基材反應,此時離子 受到電漿 sheath 加速撞擊基材可清除殘餘基材表面上的鈍化反應 物,但在側壁的鈍化反應物不易清除所以會有較佳的蝕刻側壁。 使用氯氣作為蝕刻氣體進行多晶矽蝕刻時,主要的機制為離子 能量催化蝕刻。氯原子會滲透到晶格中破壞矽鍵結(Si-Si)形成氯 化矽( , )。以電漿為主的蝕刻系統中,蝕刻所產生的氯 化矽大部分為 與 ,而大部分的氯分子會被分解為氯原子。 氯氣之電漿蝕刻反應如下所示: x SiCl x=1~4 2 4 SiCl SiCl 1.離子和電子的產生:
e
Cl
Cl
e
+
2→
2
2++
2
(2-9) e Cl Cl e+ → + +2 (2-10) 2.蝕刻物形成:電子撞擊氯分子形成氯原子e
Cl
Cl
e
+
2→
2
+
(2-11) 3.反應自由基吸附至基材上:氯分子與氯原子經由擴散到達基材上形 成鍵結 nCl Si Cl Cl surf − → ⎩ ⎨ ⎧ 2 (2-12) 4.產生化學蝕刻反應:矽基板和蝕刻物反應,生成的化學物質仍吸附 在基材上) (ads x
SiCl
nCl
Si
−
→
(2-13) 5.離子輔助反應:經由離子( 或 )可使矽基板和蝕刻物反應, 生成的化學物質仍吸附在基版上 + Cl Cl+2 ) (ads xSiCl
nCl
Si
−
→
(2-14) 6.吸附物形成氣體揮發:吸附物形成氣體後再經由真空系統抽出 ) ( ) (ads x gas x SiCl SiCl → (2-15) 2-2 電容耦合式電漿源電容耦合式電漿源 (capacitive coupled plasma)是最早利用 射頻技術所發展的電漿產生系統,利用加在兩相鄰電極板上的射頻電 壓產生電漿,但其主要的功率都消耗在 sheath 電壓降,所以產生電 漿的效率並不是很好,電漿密度約為 之間,因為電漿密 度不高所以蝕刻的速率也會下降,為提高電漿密度通常工作壓力在 20
mTorr
至 2Torr
間,由於工作壓力越高,氣體分子數目較多,造成 粒子間的碰撞機率提高,使非等向性降低。然而再提高射頻功率來增 加電漿密度,會使得 Sheath 電壓差變大,離子會加速撞擊晶圓,由 於撞擊在晶圓的離子具有很高的能量會造成晶圓上無可避免的損傷。 3 10 9 10 ~ 10 cm− 2-3 變壓耦合式電漿源 由於電容耦合式電漿源有以上的缺點,於是發展出高密度電漿 蝕刻系統(high density plasma)。目前最普遍使用的電漿源為變壓耦合式電漿源(Transformer Coupled Plasma:TCP),可以操作在較低 的壓力(1
mTorr
到50mTorr
),產生較高密度電漿。由於操作壓力較 低,粒子間的碰撞機率變小因此會有較佳的非等向性。另外一些優點 是藉由電漿源來控制電漿密度,由於粒子的加速方向平行於晶圓所以 能產生的電漿密度到達 ;晶圓上的偏壓可以控制離子能量,避 免高能量離子撞擊晶圓造成損害。由此可知高密度電漿蝕刻系統不論 在蝕刻速率、蝕刻結果、蝕刻的異向性方面都比傳統蝕刻系統還要 好,因此現今的蝕刻製程都採用高密度電漿蝕刻系統。 3 11 10 cm−TCP 可視作是 ICP(Inductively Coupled Plasma)的一種,圖 2-1 所示。其本身都是利用線圈產生感應電場來產生電漿,因為線圈位置 不同而有所區別。在 TCP 電漿蝕刻機中,是利用放置於電漿腔體 (chamber)頂端之 Antennas,通以時變 RF 電流(頻率約在 13.56Mhz) 來產生電漿。而位於腔體下方之 RF 電源則主要是產生偏壓(bias), 用以產生自偏壓(self-bias),此偏壓場會加速離子撞擊晶圓,並使 離子有較佳的方向性,從而得到較佳的蝕刻輪廓。
第三章 實驗設計
3-1 田口式實驗法 由於實驗資源是有限的,必須以最少量的實驗,獲得最大量有用 之品質特性資訊,因此產生實驗設計問題。有系統地選擇獨立變數, 進行實驗,記錄反應值,以收集建立系統模型所需的數據之程序稱為 實驗設計。田口式實驗設計是一種有效率的實驗設計法則,其主要目 的是以有限的實驗來獲得最多實驗結果並有效分析之。田口式實驗將 傳統實驗設計中因子交互作用視為雜音因素,因此適用於交互作用比 例不大的實驗上。田口式實驗是利用直交表來進行實驗,並配合訊號 雜訊比(SN),來加以討論分析,其優點為在直交表中整個設計範圍都 成立、可以大量節省實驗工作、容易分析資料。 以信號雜訊比(SN)來分析變異數,最被廣泛使用的三種形式有: 1.望大特性型: ) 1 1 ( log 10 1 2 10∑
= − = n i yi n η (3-1) 2.望小特性型: ) 1 ( log 10 1 2 10∑
= − = n i i y n η (3-2) 3.望目特性型: ) ) ( 1 ( log 10 2 1 10∑
= − − = n i i T y n η (3-3) 其中 為產品特性量測值、yi T 為產品目標值,所計算出η
即為 SN 比。直交性實驗能進行多種條件的比較,且實驗的結果可靠度和再現性都 很高,普遍常用的 就是直交表的一種形式,如表 3-1 所示。其中 A、 B、C、D 代表不同實驗因子,數字 1、2、3 代表不同因子的不同三個 水準,表內每一行都呈現直交關係。 9 L 直交表資料分析中包含:1.因子效果估計、2.變異數分析表、3. 驗證實驗。 3-1-1 因子效果估計 首先計算 A、B、C、D 的平均反應值填於表 3-2 內,A 的第一水 準 A1 平均反應值 3 ) ( 1 2 3 1 η η η+ + = A m ,以此類推。當計算出各參數的反應 值後,即可以評估各因子對結果的影響趨勢,進而選出最佳的因子水 準。 3-1-2 變異數分析表 以表 3-3 為例,利用變異數分析表探討各控制因子對品質特性 的影響程度,並分析影響的大小其是否為主要影響因子,藉以掌握最 有效的改良對策並做出正確的分析。首先先求出整個實驗的總平方和 2 9 1 2 9 1 2 9 ) ( m m SS i i i i Total =
∑
− =∑
− × = = η η (3-4) m 為所有 SN 比的平均值,接下來求SSi為因子平方和 2 3 1 ) (m m r SS ji i j =∑
− = (3-5) r表示每一水準下之實驗個數,如L9表中每一水準下實驗數為三次,所以r =3,由矩陣實驗的直交性意味以下的各個平方和之間的關係 總平方和=(各因子平方和)+(誤差平方和) (3-6) 由 3-6 式可以得到誤差平方和。實驗的自由度即有關獨立參數之個 數,一個 的實驗中就有 9 個自由度,但總平均也是一個自由度,因 此總平均和的自由度為 9-1=8,各因子自由度一般來說是水準數減 一。由矩陣實驗的直交性意味以下的各個自由度之間的關係 9 L 總平方和自由度=(各因子自由度)+(誤差自由度) (3-7) 由 3-7 式得知誤差自由度=0,所以將平方和( )較小的因子合併視 為誤差。均方和( )等於各平方和除以相對應自由度。最後將各 因子的均方和分別除以誤差均方和就可以得到個別的變異數比( j SS j MS F ) 值,F 值越大代表該因子對製程反應
η
的影響越重要,所以 F 值可以 判斷因子相對重要性的指標。因子效果信賴區間在判斷改變因子水準 所帶來的誤差相較於標準誤差是大是小時很有用。本實驗每個因子水 準效果的變異數是 2 3 1 e σ 。2 個標準差信賴區間的寬度,這也差不多是 95 百分率信賴區間是 ) 3 1 ( 2 σ2e ± ,其中為σ2e誤差變異數。 誤差變異數=誤差平方和÷
誤差自由度 (3-8) 3-1-3 驗證實驗 直交表實驗中最後一個步驟,即預測與實驗驗證,此為最終亦為 最重要的步驟,目的在於驗證直交表實驗加法模式是否成立,以及直交表實驗所建議最佳設定是否有確實帶來預期效果,此步驟首先以變 異數分析整理各因子對產品的影響性,再將主要影響變異數的因子選 出,並用其作為加法模式的預測。以這些因子作為後續最佳化的 SN 比,以ηopt表示,若 為最佳實驗組合時,且由變異數分析中 發現僅 A、B、C、D 因子為主要影響變異的可控因子,則預測最佳化 SN。 1 1 1 1BC D A
)
(
)
(
)
(
)
(
m
1m
m
1m
m
1m
m
1m
m
A B C D opt=
+
−
+
−
+
−
+
−
η
(3-9) 在決定了最適條件及其條件下的預測後,我們得知在最適參數 設定下做一實驗,然後把所觀察到的值與預測的做一比較。如果兩個 非常相近,則可說加法模式成立,如果所觀察的跟預測差很多,則我 們可以說加法模式不成立。它代表因子間強烈的交互作用。 我們需要決定預測誤差的變異數,這樣才能判斷所觀察到的 optη
跟預測的η
opt 兩者之間接近的程度。預測誤差,即所觀察η
opt 跟 所預測η
opt 的差,包括兩個獨立的部分。第一部份是在預測η
opt 時由 m, , , , 的估計誤差所造成的誤差。第二部份則是實 驗的重複誤差。因為這兩各部分是獨立的,所以預測的變異數是個別 的變異數的和。 1 A m mB1 mC1m
D1 第一部份的變異數可證明為 e n 2 0 ) 1 ( σ ,其中 01
n
可由下列計算) 1 1 ( ) 1 1 ( ) 1 1 ( ) 1 1 ( 1 1 1 1 1 1 0 n n n n n n n n n n = + A − + B − + C − + D − (3-10) 而 n 是矩陣實驗的列數, 是在矩陣實驗中水準 A1 被重複的次數, 以此類推。 1 A n 第二部份的變異數為 e n 2 ) 1 ( σ r 即為重複誤差, 為最適條件下重複實 驗次數,所以預測誤差的變異數為 r
n
e r e pred n n 2 2 0 2 ) 1 ( ) 1 ( σ σ σ = + (3-11) 而所對應的預測誤差的兩個標準差信賴區間為±2σe。如果預測誤差 超出這些界限,則加法模式可能不適用其可能的原因有: a、因子間有強烈的交互作用 b、不良的品質特性選取 c、因子與水準選取的不恰當 d、實驗過程中發生錯誤 3-2 實驗儀器介紹 本研究是採用行政院國家奈米實驗室(NDL)的 Lam TCP 9400SE 機台內使用氯氣來進行多晶矽蝕刻(Poly silicon),建立電漿蝕刻 機制的實驗模型。研究其蝕刻率、均勻度、電子密度、電子碰撞率與 電漿蝕刻設備參數的關係。電漿蝕刻設備參數的關係有電漿功率、偏 壓功率、腔體壓力、氣體流量。利用實驗設計法進行分析建立電漿蝕刻機制的實驗模型進而來研究電漿蝕刻設備的參數的影響性。 用來做驗證機台乃是 NDL Lam TCP 9400SE 機台,如圖 3-1 所示。 此機台主要為蝕刻多晶矽用,主要工作氣體為氯氣,機台的結構如第 二章所述,有兩組獨立控制的功率產生器,分別獨立控制電漿密度與 離子能量。 在收集數據的方面,是利用 ASI 出產的 Hercules,機台如圖 3-2 所示,主要是利用在 TCP9400 的腔壁上裝置上一個 sensor(SEERS, Self Excited Electron Resonance Scope),此感測器工作原理為經 由量測電漿中的 RF 電流,並非侵入式的量測,故對製程影響性甚小, 圖 3-3 所示 。此感測器能提供電漿製程中電子密度,電子碰撞頻率 等製程參數的在線測量工作的理論,故經由 SEERS 實施電漿蝕刻製程 及設備的在線測量,進一步能提供電漿蝕刻製程及設備的 APC 先進控 制方案,並藉由自激發電子電漿共振儀驗證電漿蝕刻設備和電漿蝕刻 製程的理論模型 晶圓的準備方面以六吋矽晶圓為基材,並送件請 NDL 代為加工, 在晶圓上分別以爐管沈積 的 與 的 Poly-Si,表五所 示。在蝕刻前後的薄膜厚度都利用 NDL 內的薄膜測厚儀(n&k analyzer) 來進行多晶矽薄膜厚度量測,每片晶圓量測的為 9 點其分佈如圖 3-4 所示。蝕刻率及均勻度的定義如下 A 1000 SiO2 5000A
蝕刻速率: 在測量蝕刻製程中從基材移除物質的速率有多快的一參數,所以 會影響到製程的快慢。一般定義成蝕刻前後的厚度差(ΔH )在除以 蝕刻時間(Δt)。 Etch rate(ER)= t H Δ Δ (3-12) 均勻性: 蝕刻時相當重要一點是在整個晶圓上要有一個均勻的蝕刻速 率,極高的重複性,或是好的晶圓對晶圓均勻性。一般定義成在時刻 製程前後之特定點厚度,並計算這些點蝕刻速率。 Uniformity= 100 2 min max × × − mean ER ER ER (3-13) max ER :量測九個點中蝕刻速率最快之點 min
ER
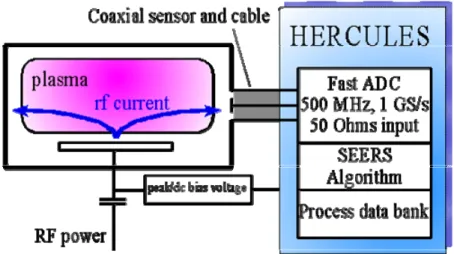
:量測九個點中蝕刻速率最慢之點 mean ER :九個點蝕刻率平均值 3-3 實驗分析討論 本實驗所採用之直交表為 L9,選取系統中的可控因子為電漿功 率、偏壓功率、壓力、氯氣流量四個輸入變數個實驗設備參數範圍如 表 3-5 所示。實驗的過程中,實驗順序為亂數排序,此目的在於降低 實驗的變異。 3-3-1 蝕刻率實驗分析根據 3-1 式可以得到蝕刻率的訊號雜訊比表 3-6 所示,由前面所 說來算出表 3-7 蝕刻率因子效果表、表 3-8 蝕刻率變異數分析表,由 表 3-8 得知對蝕刻率主要影響為電漿功率與偏壓功率,壓力與氯氣流 量影響較少。所以將影響較少註解為*來當作誤差平方和,進而算出 誤差變異數為 0.070166 再算出效果變異數為 0.02339,兩個標準差 信賴區間的寬度差不多是 95 百分率信賴區間為±0.305868,來畫出 蝕刻率因子效果圖,並將各因子兩倍標準信賴區間±0.305868 dB 標 示於圖中如圖 3-5、3-6 所示。預測誤差分為兩部分 第一部份: e e n 2 2 0 )} 9 1 3 1 ( ) 9 1 3 1 ( 9 1 { 1 σ = + − + − σ 第二部份: pred e e n 2 2 0 2 ) 1 1 ( ) 1 ( σ σ σ = + =0.330375 dB 預測誤差的兩個標準差信賴區間為±0.66075,若取蝕刻率最大 值為預測最佳化做為驗證點,因此當 會有最大蝕刻率,利用 加法性預測蝕刻率 3 2 3 3B C D A 蝕刻率(預測)=m+(mA3 −m)+(mB3−m)=73.72dB 進行上述實驗,蝕 刻率為 5042(A/min)信號雜訊比為 74.05206 dB,與預測誤差為 0.332058 皆在兩個標準信賴區間內符合預期,故對於蝕刻率加法模 式成立。以上的計算結果計錄在表 3-9。 由因子效果圖及變異數分析表,得知蝕刻率主要影響為電漿功 率為最大,偏壓功率次之,壓力最少。電漿功率增加相對的也增加電
漿密度,解離率會上生使得氯原子濃度增加,蝕刻率增加。偏壓功率 越大離子能量越大,增加離子蝕刻,蝕刻率增加。 3-3-2 均勻度實驗分析 根據 3-2 式可以得到均勻度的訊號雜訊比表 3-10 所示,如同 3-1-1 節所述,可以得到表 3-11、3-12、3-13,圖 3-7、3-8。由變 異數分析表可得知除了電漿功率以外其餘都對均勻性皆有影響。 由表 3-13 得知預測誤差的兩個標準差信賴區間為 6.263103 dB,若取均勻度最小值為預測最佳化做為驗證點,因此當 會 有最小均勻度,利用加法性來預測均勻度為 7.020263 dB 進行上述實 驗,均勻度為 2.12,信號雜訊比為-6.5267 dB,發現到預測值與實 際值差超出兩個標準信賴區間內,可能的原因在於實驗量測是使用 n&k 薄膜測厚儀,量測需要人工去對準之前的量測點會造成量測上的 誤差,而且本身儀器在算厚度時也會有誤差,或是有明顯的可控因子 間交互作用及實驗數據不足,導致不符合加法性的預測。 ± 2 1 1 3BC D A 3-3-3 電子密度實驗分析 根據 3-1 式可以得到電子密度的訊號雜訊比表 3-14 所示,如同 3-1-1 節所述,可以得到表 3-15、3-16、3-17,圖 3-9、3-10。由變 異數分析表可得知電漿功率與壓力為最顯著因子,偏壓功率影響不 大,由此發現 TCP 系統理兩組 RF Power 是分別獨立控制電漿密度與
離子能量的設計。 由表 3-17 得知預測誤差的兩個標準差信賴區間為 2.730389 dB,若取電子密度最大值為預測最佳化做為驗證點,因此當 會有最大電子密度,利用加法性來預測電子密度為 202.4176 dB 進行 上述實驗,電子密度為 1.53 ,信號雜訊比為 203.7165 dB, 發現到預測值與實際值在兩個標準信賴區間內,符合加法性。壓力增 加下電子密度並未增加,而是下降現象,主要是在高操作壓力下電子 能量低影響游離率,導致電子無法使氯原子與氯分子產生更多的電 子。在電漿理論中電漿功率越高所代表的電子密度越高,本實驗做出 的結果與事實不符可能的原因在於 SEERS 感測器是裝在腔壁上,因為 機台是屬於長時間工作的機台造成許多殘留的粒子和電荷的累積使 感測器會有誤差或是感測器老舊影響實驗數值的正確性。 ± 2 1 3 2B C D A 3 10 10 − × cm 3-3-4 電子碰撞率實驗分析 根據 3-1 式可以得到電子碰撞率的訊號雜訊比表 3-18 所示,如 同 3-1-1 節所述,可以得到表 3-19、3-20、3-21,圖 3-11、3-12。 由變異數分析表可得知電漿功率與流量與壓力為最顯著因子。 由表 3-21 得知預測誤差的兩個標準差信賴區間為±7.8 dB,若 取電子碰撞率最大值為預測最佳化做為驗證點,因此當 會有 最大電子碰撞率,利用加法性來預測電子碰撞率為 170.445 dB 進行 1 3 1 1BC D A
上述實驗,電子碰撞率為 ,信號雜訊比為 171.7632 dB, 發現到預測值與實際值在兩個標準信賴區間內,符合加法性。壓力上 升平均自由徑會減小所以電子碰撞率會上升,電漿功率增加影響電子 溫度而減少電子碰撞率。 1 8 10 87 . 3 × S−
第四章 倒傳遞類神經網路控制器設計
4-1 類神經網路 類神經網路為一種仿照人類神經思考結構與資訊處理運算模式 之計算系統,其最大的優點在於非線性轉換能力強,對於複雜的系統 可經由類神經來描述。電漿蝕刻是一個複雜的非線性系統包括物理性 與化學性的反應,利用統計方式無法精準的建立輸入與輸出間的關 係,用類神經網路可以建立輸入與輸出間的關係,並可準確的預測不 同的輸入所得到的輸出結果。類神經網路架構會影響系統的學習能 力,神經元太少則無法處理複雜系統型態,神經元太多則效率不佳。 如何決定類神經網路架構,可依系統的複雜程度、經驗的累積與事物 法則來決定最佳的網路。目前類神經網路最具有代表性的即是倒傳遞 類神經網路。 4-2 倒傳遞類神經網路倒傳遞類神經(Back-propagation Neural Network)是一種具有 學習能力的多層前授型網路倒傳遞網路的網路結構,包含輸入層、隱 藏層及輸出層,而隱藏層可以不只一層。每一層中的神經元彼此不相 連接,而不同層間的神經元則彼此相連,且信號的流向是由輸入層向 輸出層單向傳播如圖 4-1 所示。倒傳遞網路中的神經元最常用的非線 性轉換函數為雙彎曲函數(sigmod function),如圖 4-2 所示其中
x e x f − + = 1 1 ) ( (4-1) 這種函數 f(x)介於(0,1)之間而且 f′(x)= f(x)(1− f(x))。 倒傳遞網路的運算過程,分為學習與回想兩部分。其中學習過 程是一種監督式學習,它從問題領域中取得訓練範例及目標輸出值, 並 將 訓 練 範 例 輸 入 至 網 路 中 , 利 用 最 陡 坡 降 法 (the gradient steepest descent method)反覆地調節網路的連接加權值(weight) 及偏權值(bias)。我們希望在學習過程中,網路的推論輸出值與我們 想要的目標輸出值越接近越好,而修正網路加權值及偏權值的方法, 是將目標輸出值與網路的推論輸出值之間的誤差,一邊向後傳播一邊 加以修正所以我們將此種網路以倒傳遞的名稱來稱之。倒傳遞網路的 回想過程,是一種分類或預測的過程。當我們輸入一個待推的範例, 我們希望網路能告訴我們最有可能的輸出結果。所以此種網路的應 用,常用於分類、預測、資料壓縮及雜訊過濾等各方面。 4-2-1 倒傳遞網路運算法 在圖 4-1 所示,輸入層為第 i 層輸入節點,其中對神經元輸入 與輸出表示為 ⎩ ⎨ ⎧ = = = ] [ ]) [ ( ] [ ] [ ] [ i x i net f i y i x i net i (4-2) 其中 y[i]為輸入層的輸出 隱藏層第 h 個神經元輸入與輸出表示為
⎪ ⎩ ⎪ ⎨ ⎧ + = = − ⋅ = −
∑
] [ 1 1 ]) [ ( ] [ ] [ ] [ ] ][ [ ] [ h net h i e h net f h y h i y h i w h net θ (4-3) 其中 y[h]為隱藏層的輸出,w[i][h]代表輸入層節點 i 與隱藏層 j 間 的連結權重值,θ[h]代表隱藏層的偏權值,f(•)為雙彎曲函數 輸出層第 j 個神經元輸入與輸出表示為 ⎪ ⎩ ⎪ ⎨ ⎧ + = = − ⋅ = −∑
] [ 1 1 ]) [ ( ] [ ] [ ] [ ] ][ [ ] [ j net j h e j net f j y j h y j h w j net θ (4-4) 其中 y[j]為輸出層的輸出,w[h][j]代表隱藏層節點 h 與輸出層 j 間 的連結權重值,θ[ j]代表輸出層的偏權值,f(•)為雙彎曲函數。 由 於 倒 傳 遞 類 神 經 屬 於 監 督 式 學 習 , 所 以 定 義 誤 差 函 數 (Error Function)為∑
− = j j y j T E ( [ ] [ ])2 2 1 (4-5) 其中 T[j]為目標輸出值。我們希望 E 值越小越好。利用最陡坡降法 可知:網路的加權值及偏權值的修正應使 E 越來越小,及網路的加權 值及偏權值應沿 E 函數梯度下降的方向來修改,所以我們得到 ] ][ [ ] ][ [ h i w E h i w ∂ ∂ − = Δη
(4-6) ] ][ [ ] ][ [ j h w E j h w ∂ ∂ − = Δ η (4-7)] [ ] [ h E h
θ
η
θ
∂ ∂ − = Δ (4-8) ] [ ] [ j E j θ η θ ∂ ∂ − = Δ (4-9) 其中 ] ][ [i h w Δ 為輸入層第 i 個神經元與隱藏層第 h 個神經元間的加權值修 正量。 ] ][ [h j w Δ 為隱藏層第 h 個神經元與輸出層第 j 個神經元間的加權值修 正量。 ] [h θ Δ 為隱藏層第 h 個神經元的偏權值修正量。 ] [ j θ Δ 為輸出層第 j 個神經元的偏權值修正量。η
為學習速率,η
>0。 1.Δ
w
[
h
][
j
]
修正公式的推導 由微積分的鏈鎖律可得: ] [ [j] ] [ ]) [ 1 ( ] [ ]) [ ] [ ( ] [ ]) [ ( ]) [ ] [ ( ] ][ [ ] [ ] [ ] [ ] [ ] ][ [ h y h y j y j y j y j T h y j net f j y j T j h w j net j net j y j y E j h w E j ⋅ = ⋅ − ⋅ ⋅ − − = ⋅ ′ ⋅ − − = ∂ ∂ ∂ ∂ ∂ ∂ = ∂ ∂ δ (4-10) 其 中 δ[j]= (T[j]− y[j])⋅ y[j]⋅(1− y[j]) 定 義 為 輸 出 層 的 差 距 量 。 的修正公式為: ] ][ [h j w Δ ] [ ] [ ] ][ [h j j y h w = ⋅ ⋅ Δη
δ
(4-11)]
][
[
]
][
[
]
][
[
h
j
w
h
j
w
h
j
w
=
+
Δ
(4-12)]
[
]
[
j
ηδ
j
θ
=
−
Δ
(4-13) ] [ ] [ ] [jθ
jθ
jθ
= +Δ (4-14) 2.Δ
w
[
i
][
h
]
修正公式的推導 ] ][ [ ] [ ] [ ] [ ] [ ] ][ [ wi h h net h net h y h y E h i w E ∂ ∂ ∂ ∂ ∂ ∂ = ∂ ∂ (4-15) 其中∑
∑
∑
⋅ = ⋅ ′ ⋅ − − = ∂ ∂ ∂ ∂ ∂ ∂ = ∂ ∂ j w[h][j] [j] ] ][ [ ]) [ ( ]) [ ] [ ( ] [ ] [ ] [ ] [ ] [ ] [ δ j j j j h w j net f j y j T h y j net j net j y j y E h y E (4-16) ] [ ] [ ] [ ]) [ ( w[h][j] [j] ] ][ [ j i y h i y h net f h i w E h ⋅ − = ⋅ ′ ⋅ ⋅ − = ∂ ∂ ∴∑
δ δ (4-17) 其 中 定 義 為 隱 藏 層 的 差 距 量 。 修正公式為:∑
⋅ ⋅ − ⋅ = j j h w j h y h y h] [ ] (1 [ ]) [ ] [ ][ ] [ δ δ ] ][ [i h w Δ ] [ ] [ ] ][ [i h h y i w = ⋅ ⋅ Δη
δ
(4-18) (4-19) ] ][ [ ] ][ [ ] ][ [i h wi h wi h w = +Δ ] [ ] [hηδ
hθ
= − Δ (4-20)]
[
]
[
]
[
h
θ
h
θ
h
θ
=
+
Δ
(4-21) 學習過程通常以一次一個訓練樣本進行,直到網路學習完所有的的訓 練樣本,通常為數個學習循環,我們可以讓網路重複學習數個循環,直到網路收斂為止,圖 4-3 為倒傳遞類神經流程圖。 倒傳遞網路廣泛應用在許多領域中仍有許多缺點像是:學習時 間過常收斂速度慢、收斂不一定收斂到整個區域最小值有局部最小值 情況發生、學習速率的選定不好的情形,學習速率太大會振盪,學習 速率太小會導致學習太慢。 4-3 類神經網路蝕刻率模型建立 本實驗所採用的類神經網路為倒傳遞神經網路結構,結構採用 一層輸出層,一層隱藏層及一層輸出層,建立輸入變數電漿功率、偏 壓功率、壓力和氯氣流量與輸出變數蝕刻率的模型。首先建立類神經 網路訓練工作,一般來說訓練樣本越多所建立之模型更加準確描述系 統,經過訓練完之後再來進行驗證工作使輸出預測值與測量值相比 較,來驗證倒傳遞神經網路是否可以正確的描述此系統。如何得知類 神經網路是否良好?可採用標準差來評估,其定義如下 2 1 ) ( 1 1
∑
= − − = N i pi i y y N σ (4-22) 其中 N 為測量實驗數 iy
為量測實際值 piy
為類神經網路樣本預測值 利用表 4-1 的 17 筆數據做為類神經網路訓練樣本,實驗選取的 樣本採用全因子設計法再加上中心點。全因子設計法是利用 k 因子 2來設計,所謂的 因子設計就是有 K 個因子 2 個水準的實驗設計方 法,此種方法對於各因子間的所有組合都必須研究,可以瞭解所有因 子間的主效應(Main Effect)及所有交互作用的影響。實驗表 4-2 的 9 筆數據做為預測驗證之用,經由試誤法測試比較後,使用結構輸入 層神經元數目為 4、隱藏層神經元數目為 3、輸出層神經元數目為 1, 會有較佳的預測結果如表 4-3、如圖 4-4,表 4-4 為預測值與實際值 標準差,因此類神經網路採用 4-3-1 來建立蝕刻率的模型。 k 2 當類神經網路建立完成並且完成驗證實驗後,利用此模型來畫 出欲觀察的輸入變數對輸出數的觀察圖,並以三維圖來表示其中心操 作點如表 4-5 所示,來畫出蝕刻率與電漿功率、偏壓功率、壓力和氯 氣流量如圖 4-5~圖 4-10,由這些操作參數對蝕刻率以三維圖來顯 示。電漿功率與偏壓功率的增加,會使蝕刻率線性正比增加,相較之 下 氯 氣 流 量 與 腔 體 壓 力 的 增 加 會 使 蝕 刻 率 緩 慢 增 加 。 而 壓 力 在 10mTorr 會有最大值,原因在於壓力增加使得電子密度增加所以蝕刻 率增加,到了越高的壓力下電子的能量低於游離率,造成 與 下 降因此蝕刻率也就跟著下降。電漿功率和偏壓功率對對蝕刻率的影響 遠比壓力和氯氣流量明顯。以中心操作點當固定值一次變動單一個操 作參數,當電漿功率由 200W 增加到 600W,蝕刻速率由 3233A/min 增 加到 4710A/min,偏壓功率由 150W 增加到 250W,蝕刻速率由 3560A/min 2 cl
cl
增加到 4337 A/min,腔體壓力由 8 mTorr 增加到 12 mTorr,蝕刻率 由 3742 A/min 先增加到 4075 A/min 降到 3849 A/min,氯氣流量由 80 sccm 增加到 120 sccm,蝕刻速率由 4024A/min 增加到 4103 A/min。 由這些結果也印證田口式法所得到的結論是相同的趨勢 。
4-4 控制器的設計
本研究採用類神經網路鑑別器(Neural Network Identifier, NNI)與類神經網路控制器(Neural Network controller, NNC)如 圖 4-11 所示,網路是採用倒傳遞網路來控制。經由類神經網路鑑別 器的修正量與實際輸出蝕刻率與目標蝕刻率差,修正類神經網路控制 器加權值與偏權值進而達到目標蝕刻率。 類神經網路鑑別器網路架構定義方式如 4-2-1 節所示,定義輸 入層為 i,隱藏層為 h,輸出層為 j。一開始先採用線外的網路訓練, 利用這些訓練資料建立出各參數間與蝕刻率的粗略模型,得到網路的 初始加權值與偏權值。再來採取線上即時控制,來類神經網路鑑別器 及時訓練更新加權值與偏權值,使得類神經網路鑑別器越來越接近蝕 刻設備進而提供類神經網路控制器修正量 u yp ∂ ∂ ,先將 4-2-1 節誤差函 數定義為 =
∑
− j p j y j y E ( [ ] [ ])2 2 1 ,再將 T[j]換成實際蝕刻率的輸出 即可得到修正量 ] [ j yp u yp ∂ ∂ 為ξ = ′ ⋅ ⋅ ′ ⋅ = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = ∂ ∂ = ∂ ∂ ≈ ∂ ∂
∑ ∑
]) [ ( ] ][ [ ])} [ ( f w[h][j] { ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ h j j net j w i h f net h i x i y i y h net h net h y h y j net j net j y x y u y u y h p (4-23) 類神經網路控制器方面定義輸入層為 j,隱藏層為 o,輸出層為 i,網路不需先進行訓練,隨機選取加權值與偏權值然後定義誤差函 數 =∑
− j p d c y j y j E ( [ ] [ ])2 2 1 , 是蝕刻率的目標值, 實際蝕刻 率的輸出。在而來算出 NNC 輸出層的差距量 ] [ j yd yp[ j] ] [i y δ ] ][ [ ] [ ] [ ] ][ [ w o i j y j y E i o w E p j p c c ∂ ∂ ∂ ∂ = ∂ ∂∑
(4-24) y[o] (net[i]) f ] ][ [ ] [ ] [ ] [ ] [ ] [ ] ][ [ ] [ ] [ ] [ ] ][ [ ] [ i′ ⋅ ⋅ = ∂ ∂ ∂ ∂ ∂ ∂ = ∂ ∂ ∂ ∂ = ∂ ∂ ξ i o w i net i net i u i u j y i o w i u i u j y i o w j yp p p (4-25) y[o] [i] ] [ ]) [ ( ])} [ ] [ ( { ] ][ [ y ⋅ = ⋅ ′ ⋅ ⋅ − − = ∂ ∂∑
δ ξ j i p d c y j y j f neti yo i o w E (4-26) (4-27)∑
− ⋅ ⋅ ′ = j i p d j y j f net i y [ ] [ ])} ( [ ]) ( { [i] yξ
δ
進而即時更新類神經網路控制器加權值與偏權值來達成蝕刻率的控 制。 4-5 控制器的模擬與討論 4-5-1 類神經網路鑑別器與控制器參數 電漿蝕刻是一種高度複雜性的非線性系統包括物理性與化學系的反應,所以正確描述蝕刻率是很重要的,為了瞭解類神經網路鑑別 器所提供的修正量給類神經網路控制器,在蝕刻率控制方面扮演何種 重要的角色, 所以先將 4-3 節所建立的蝕刻率模型當作實際的蝕刻 率模型,在第 3 章提過經由試誤法所建立的模型為 4-3-1 所以類神經 網路鑑別器所採用的是 4-3-1,採用單輸入單輸出系統(SISO, Single Input Single Output),輸入為電漿功率輸出為蝕刻率,其他輸入值 在中心點上。類神經網路鑑別器所建立的蝕刻率模型分別有完全沒經 過訓練和經過訓練的實際相差 MAPE(Mean Absolute Percentage Error)為 5%。平均絕對值百分比誤差 MAPE 定義如下: MAPE= 1 ×100% −
∑
= N N y y N i pi i (4-28) ,此時 NNC 採用固定的加權值與偏權值,類神經網路控制器的網路架 構為 1-3-4,學習速率為 5,進行 300 批量,模擬蝕刻率目標值為 4000 (A/min ),來進行模擬。由圖 4-12 得知經過訓練後的 NNI 比未經過 訓練的還要好,這也告訴我們當類神經網路鑑別器越來越接近正確的 蝕刻率時,會提供正確的修正量來修正類神經網路控制器做最佳修正 以達成正確的蝕刻率目標值,由圖 4-12 得知蝕刻率未到達正確的 值,類神經網路控制器學習速率大所導致。所以學習速率縮小為 1 時 發現偏離更多標準蝕刻率,加大學習速率為 10 時也不會到達蝕刻率目標值 。過大的學習速率將導致網路加權修正過量,造成收斂過程 中振盪導致無法達蝕刻率目標值。為了解決這個問題所以在類神經網 路控制器加入動量項(momentum),學習法則為:
)
](
][
[
]
[
]
[
)
1
](
][
[
h
j
n
j
y
h
W
h
j
n
W
+
=
⋅
⋅
+
Δ
Δ
η
δ
α
(4-29) 即加上某比例上的上次加權值改變量以改善收斂過程中振盪現象,及 加速收斂。所以進行類神經網路控制器動量項的模擬分別為加入α
=0.3 與α
=0.4 如圖 4-12 所示,得到的結果是加入動量項 0.4 與 目標蝕刻率已經相差不遠也比加入動量項 0.3 好,也間接的驗證以上 的理論。 4-5-2 類神經網路鑑別器與控制器於實際製程模擬 由於電漿蝕刻製程易受到微小和不易控制之原因所造成的,如 機台的不規則性的震動、環境中之溫度與濕度的變化、腔體本身有殘 留過多的粒子或是機台隨著時間的變化逐漸老化而造成蝕刻率的下 降。本節來模擬電漿蝕刻製程受到雜訊的干擾,是否經由類神經網路 控制器與鑑別器的調整來到達目標值。主要影響蝕刻製程中雜訊干擾 有偏移與飄移兩種。 蝕刻製程中在穩定狀態下一般只受到隨機雜訊的干擾,這些干 擾只有稍許的誤差在我們所能夠接受的範圍內,本文中定義稍許的隨 機誤差為一個製程標準差 200,在目標蝕刻率 4000(A/min)輸出值上下進行振盪的,目標蝕刻率上下限界為 2σ 、300 個批量,上下限 界的選定則是對品質的要求,超出這個限界造成產品的損壞如圖 4-13 所示。 當蝕刻製程在一開始隨著批量的增加就發生向下飄移,超出上 下限界如圖 4-14 所示,若沒有及時的導正會造成大量不良品產生和 金錢浪費,所以使用類神經網路控制器與鑑別器來加以調整至目標 值,類神經網路控制器網路架構為 1-3-4、學習速率為 5、動量項為 0.4 來加以控制如圖 4-15,圖得知在 150 批量偏移發生時,類神經網 路控制器就開始慢慢的拉回到 2σ 內,電漿輸入功率由 379W 到 553W 如圖 4-16 所示,但後 50 批量的又開始超出 2σ ,原因在於類神經控 制器在後 50 批量因為飄移量加大無法快速調整電漿功率來調整至 2σ 內,所以我們將動量項加至 0.7 如圖 4-17 所示,輸入功率由 379W 到 599W 控制蝕刻製程在 2σ 內,也就是用更大的電漿功率來補償飄移 量。若將類神經網路控制器網路架構為 1-1-4 與 1-5-4 來看控制器的 網路架構會有何種影響?如圖 4-18、4-19,可發現兩個架構都在 2σ 內,也就是說只要調整適當類神經網路控制器的學習速率以及動量項 都可以將蝕刻率在標準值內。根據以上的探討我們採用類神經網路控 制器網路架構為 1-3-4、學習速率為 5、動量項為 0.7 來做偏移雜訊 的電漿蝕刻製程模擬。
當蝕刻製程在 150 批量時發生向下偏移 2σ,超出上下限界如圖 4-20 所示,若沒有及時的導正會造成大量不良品產生和金錢浪費, 所 以 使 用 類 神 經 網 路 控 制 器 與 鑑 別 器 來 加 以 調 整 至 目 標 值 如 圖 4-21,得知在 150 批量偏移發生時,類神經網路控制器就開始修正拉 回到 2σ 內,只有在 157 批之前有幾批超出標準值外,輸入功率由 379W 到 553W 如圖 4-22 所示。由於到達目標蝕刻率收斂速度過慢,所以加 大學習速率為 40 如圖 4-23 所示,可快速到達目標蝕刻率。輸出功率 快速調整來消除偏移量對蝕刻製程的影響如圖 4-24 所示。 由以上的討論發現類神經網路控制器與鑑別器不論對於飄移或 是偏移雜訊干擾都能控制輸出量到目標值上,因此再繼續討論多輸入 單輸出系統,(MISO, Multi Input Single Output)選取輸入為電漿 功率與偏壓功率,控制器的學習速率仍為 40 來進行模擬,如圖 4-25、 4-26 所示可以將蝕刻製程控制在 2σ 內,快速到達目標蝕刻率。除非 當飄移量和偏移量雜訊變大並且 SISO 系統所能提供的只有電漿功率 600W 來消除飄移量和偏移量。若是超出 600W 飄移量和偏移量就無法 消除,所以使用 MISO 使我們更加的有彈性來排除飄移量和偏移量雜 訊干擾。
第五章 結論與未來展望
5-1 結論 本研究利用田口式方法來觀察電漿設備與蝕刻率、均勻度、電子 密度和電子碰撞頻率之間的關係。由實驗結果顯示出均勻度不符合加 法性,可能的原因在於因子間有交互作用或是人為實驗的誤差所造成 的。電子密度與電子碰撞頻率受到感測器 SEERS 的誤差造成結果不是 很符合實際的理論。影響蝕刻率最主要的是電漿功率與偏壓功率,在 利用類神經網路來建立蝕刻率模型更可以看出電漿設備參數與蝕刻 率的關係。在利用類神經網路控制器與鑑別器來模擬實際的電漿蝕刻 製程,結果顯示出不管偏移或是飄移雜訊控制器均可以控制到理想蝕 刻率區域內。 5-2 未來展望 本論文對於為來研究之建議如下: 1.本文控制器是採用 SISO 與 MISO 來控制蝕刻率,但是在電漿蝕刻製 程中不只是蝕刻率重要而且均勻度也很重要,因此在後續的研究可增 加為 MIMO 系統來控制蝕刻率與均勻度。 2.由模擬結果顯示出類神經網路控制器與鑑別器能夠去除雜訊的影 響,後續研究方面可進行實驗並擴展到有圖案的晶圓上來驗證控制器 的好壞與實用性。3.本研究中所著重為電漿蝕刻設備的控制研究,對於晶圓表面化學反 應並無太多著墨,所以在後續研究方面可以對這一部份來進行探討, 建立起晶圓表面化學反應的模型建立,便能更清楚瞭解電漿蝕刻。
參考文獻
[1] R.A.Stewart, P.Vitello, and D.B.Graves, “Two-dimensional fluid model of ligh density inductively coupled plasma sources", 1994 J.Vac.Sci.Technol.B, 12, p487-485
[2] Peter L.G. Ventzek, Robert J. Hoekstra, and Mark J.kushner, “Two-dimensional modeling of high plasma density inductively coupled source for materials processing", 1994 J. Vac. Sci. Technol. B.12(1)
[3] Gary S.Mary,Jiahua Huang,Costas J.Spanos, “Statisical Experimental Design in Plasma Etch Modeling",IEEE Trans. Semicond. Manuf, VOl.4, NO.2, pp83-97, May 1991
[4] Christopher D Himmel and Gary S.Mary, “Advantages of Plasma Etch Modeling Using Neural Network Over Statistical Techniques" ,IEEE Trans. Semicond. Manuf, VOl.6, NO.2, pp 103-111, May 1993
[5] Byungwhan Kim and Gary S.Mary, “An optimal neural network process model for plasma etching" ,IEEE Trans. Semicond. Manuf, VOl.7, NO.1, pp 12-21,February 1994
[6] David Stokes and Gary S.May, “Real-time Control of Reactive Ion Etching Using Neural Networks " ,IEEE Trans. Semicond. Manuf, VOl.3, NO.4, pp 469 - 480 November 2000
[7] R. Patrick, S. Baldwin, N. Williams, “Application of direct bias control in high-density inductively coupled plasma etching equipment", J. Vac. Sci. Technol. A 18(2) 2000
[8] Cheg-Hung Chang, Keh-Chyang Leou and Chaung Lin, “Real-time feedback control of electron density in inductively coupled plasma", J. Vac. Sci. Technol. A 19(3) 2001
[9] Cheg-Hung Chang, Keh-Chyang Leou and Chaung Lin, “Real-time control of ion energy in chlorine inductively coupled plasma etch processing", J. Vac. Sci. Technol. A 21(4) 2003
[10] J. M. Lane, F. P. Klemens, K. H. A. Bogart, M. V. Malyshev, and J. T. C. Lee, “'Feature evolution during plasma etching II Polycrystalline silicon etching", J. Vac. Sci. Technol. A 18(1), pp188-196, 2000
[11] Andreas Steinbach, “Importance of in-situ measurement techniques for Advanced Process Control of plasma processing in high volume production", 3rd European AEC/APC Conference - Dresden, April 10th
-12th
2002
[12] Brian Chapman, “Glow Discharge Process: sputtering and plasma etching", Wiley, New York, 1980
[13] M. A. Lieberman and A. J. Lichtenberg, “Principles of Plasma Discharges and Materials Processing", Wiley, New York, 1994. [14] Dennis M Manos, Daniel L.Flamm, “Plasma Etching:An Introduction",
Academic, New York, 1989.
[15] Madhav S, Phadke, “Quality Engineering Using Robust Design", New Jersey, 1989
[16] Faa-Jeng Lin, Rong-Jong Wai and Chun-Ming Hong, “Identification and control of rotary traveling-wave type ultrasonic motor using neural", IEEE Trans. control.technology, VOl.9, NO.4, pp 672-680,Tuly 2001
[17] Guo, H.-F, Spanos, C.J, Miller and A.J, “Real time statistical process control for plasma etching", IEEE Trans. Semiconductor Manufacturing Science Symposium,pp113 - 118,May 1991
[18] 莊達人, "VLSI製造技術", 高立圖書, 4th 2000 [19] 葉怡成, "實驗計畫法-製程與產品最佳化", 五南圖書出版 社, 2001 [20] 王進德 蕭大全, "類神經網路與模糊控制理論入門", 全華 科技圖書股份有限公司, 2003 [21] 徐振斌, "氬/氯對多晶矽於高密度電感式耦合電漿之蝕刻率 分析與模型建立", 國立清華大學工程與系統科學系碩士論 文, 2002 [22] 李介民, "變壓耦合式電漿二維流體模型與批次電漿蝕刻設備 控制", 國立交通大學機械工程學系碩士論文, 2004 [23] 張朝雯, "變壓耦合式電漿製程設備之先進設備控制", 國立 交通大學機械工程學系碩士論文, 2004 [24]胡俊男, "應用類神經網路於半導體製程即時控制之研究", 私立元智大學工業工程與管理研究所碩士論文,2002
表 3-1 田口式直交表 L9( 4) 3 Factor Exp. A B C D Result S/N ratio (dB) Ⅰ 1 1 1 1 y 1 η1 Ⅱ 1 2 2 2 y 2 η2 Ⅲ 1 3 3 3 y 3 η3 Ⅳ 2 1 2 3 y 4 η4 Ⅴ 2 2 3 1 y 5 η5 Ⅵ 2 3 1 2 y 6 η6 Ⅶ 3 1 3 2 y 7 η7 Ⅷ 3 2 1 3 y 8 η8 Ⅸ 3 3 2 1 y 9 η9 表 3-2 因子效果估計表 A B C D Level 1 m A1 m B1 m C1 m D1 Level 2 mA2 mB2 mC2 mD2 Level 3 m A3 m B3 m C3 mD3 Average 3 3 2 1 A A A m m m m= + + 3 3 2 1 B B B m m m m= + + 3 3 2 1 C C C m m m m= + + 3 3 2 1 D D D m m m m= + + 表 3-3 變異數分析表 Factor Sum of Square Degree of Freedom Mean of Square F A SSA fA MSA MS /A MSe B SSB fB MSB MS /B MSe C SS C f C MS C MS /C MSe D SSD fD MSD MS /D MSe Total error MS e Total SSTotal 8
表 3-4 實驗規劃表 蝕刻機台 NDL Lam TCP 9400SE 晶圓規格 六吋晶圓 蝕刻氣體 氯氣 蝕刻時間 60 秒 Poly-Si 5000A SiO2 1000A Substrate 表 3-5 實驗參數範圍 因子 水準 電漿功率 (W) 偏壓功率 (W) 壓力 (mTorr) 氯氣流量 (sccm) 1 200 150 8 80 2 400 200 10 100 3 600 250 12 120 表 3-6 蝕刻率實驗配置和 SN 比 因子 No. 電漿功 率(W) 偏壓功 率(W) 壓力 (mTorr) 氯氣流 量 (sccm) 蝕刻率 (A/min) η (SN ratio) (dB) Run 1 200 150 8 80 2808 68.96794 Run 2 200 200 10 100 3161 69.99649 Run 3 200 250 12 120 3512 70.91109 Run 4 400 150 10 120 3790 71.57278 Run 5 400 200 12 80 3919 71.86351 Run 6 400 250 8 100 4245 72.55755 Run 7 600 150 12 100 4135 72.32951 Run 8 600 200 8 120 4520 73.10277 Run 9 600 250 10 80 4795 73.61577
表 3-7 蝕刻率因子效果估計表 A B C D 因子 電漿功率 偏壓功率 壓力 氯氣流量 Level 1 69.95851 70.95675 71.54275 71.48241 Level 2 71.99795 71.65425 71.72835 71362785 Level 3 73.01602 72.36147 71.70137 71.86221 Average 71.65749 71.65749 71.65749 71.65749 表 3-8 蝕刻率變異數分析表 Factor Sum of Square Degree of Freedom Mean of Square F A 14.54415 2 7.272074 103.6404 B 2.959932 2 1.479966 21.09224 C 0.06031 * 2 0.030166 0.429916 D 0.220334 * 2 0.110167 1.570084 Total error 0.280666 4 0.070166 Total 17.78475 表 3-9 蝕刻率預測誤差及驗證 95 百分信賴區間 ± 0.305968 預測誤差 0.330375 預測誤差的兩個標準信賴區間 ± 0.66075 電漿蝕刻率(預測)A3B3 73.72 電漿蝕刻率(實際)A3B3C2D3 74.05206 實際-預測 0.332058