行政院國家科學委員會專題研究計畫 成果報告
動態車流路網模擬模式之建立
計畫類別: 個別型計畫 計畫編號: NSC91-2211-E-009-050- 執行期間: 91 年 08 月 01 日至 92 年 07 月 31 日 執行單位: 國立交通大學運輸科技與管理學系 計畫主持人: 卓訓榮 計畫參與人員: 黃銘崇 施憲宏 藍健綸 報告類型: 精簡報告 處理方式: 本計畫可公開查詢中 華 民 國 92 年 10 月 31 日
行政院國家科學委員會補助專題研究計畫
□ 成 果 報 告
□期中進度報告
動態車流路網模擬模式之建立
Dynamic Traffic Flow Network Simulation Model
計畫類別:□ 個別型計畫 □ 整合型計畫
計畫編號:NSC91 -2211-E009-050
執行期間: 91 年 8 月 日至 92 年 7 月 日
計畫主持人:卓訓榮
共同主持人:
計畫參與人員: 黃銘崇 施憲宏 藍健綸
成果報告類型(依經費核定清單規定繳交):□精簡報告 □完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
執行單位:交通大學運輸科技與管理系
中 華 民 國 92 年 10 月 22 日
ˇ
ˇ
ˇ
動態車流路網模擬模式之建立
Dynamic Traffic Flow Network Simulation Model
中文摘要:
傳統的動態路網模式在探討交通量指派與路徑選擇時,是以流量-成本函數所計算的旅 行時間來求得路徑旅行時間,這樣的計算方式是有其缺失的。在不同的車流狀態或道路幾 何下就應該採用不同的成本函數來推估旅行時間。因此,在本計畫中將採用不同的作法來 計算旅行時間。本計畫是以之前發展的「每日動態調整模式」(Day-to-Day Path Flow Adjustment Model)為基礎來構建整合性的動態路網分析模式,應用微分方程式描述每日路 徑流量變化率及 ITS 預估旅行時間變化率。在計算路徑旅行時間的部分,是將 LWR 車流模 式搭配起始條件與邊界條件構建成起始值-邊界條件連續方程式後,求解連續方程式得路段 上的流量及密度,接著再利用 q=k*u 的關係式則可求得路段上車輛的運行速度。而這些速 度資料可被利用於計算車輛運行某段距離所需要的旅行時間,若將這些旅行時間加總,則 可求得路段甚至是路徑的旅行時間。當求解每日動態調整模式時,是採用高階 Runge-Kutta 法求解系統微分方程組(System ODEs)。在本計畫中,會將整合性的動態路網分析模式應用 在一小型的高速公路單車道路網中,並求得滿足使用者均衡之流量。本計畫所發展的模式 可在未來拓展到號誌路口或多車道之道路環境,並且可嘗試與智慧型運輸系統結合,以提 供旅行者相關的道路資訊。此外,可利用平行計算(Parallel Computing)來求解模式,加 快求解速度,以達提供即時資訊之目標。 Abstract:
The traditional treatment for computing travel time of links in the network was the flow-cost function Ca(fa) and aggregated link costs to obtain the path cost for each path in the network. This
method is not appropriate for network dynamics. In this research, another method for computing link costs is proposed. The computational method of link costs is to employ LWR model, which is a famous traffic flow model, for obtaining the velocity at each position for each time interval and computing the travel time, and then the path travel time can also be obtained by aggregating related link travel time. Moreover, the “Day-to-Day Path Flow Adjustment Model” is introduced for constructing the dynamic traffic flow network simulation model, and the high order Runge-Kutta method is used for solving the system ordinary differential equations of the model in this research. A simply network example is simulated and the results are discussed. For the goal of real-time update, it is necessary for using parallel computing process to simulate a complex network.
動態車流路網模擬模式之建立
Dynamic Traffic Flow Network Simulation Model
一、前言
運輸系統之課題,有許多係由過去逐漸發展而形成,亦有許多則係目前尚未發生。近 年來交通運輸問題日益嚴重,闢建實體道路設施之速度遠不及交通需求增加的速度,因此 世界各先進國家均以運輸系統管理(Transportation System Management, TSM) 的策略替代 增建道路,而運輸系統管理策略應用時效果有限且有些方法不易落實執行,因而引起先進 運輸科技之研發。先進運輸科技與推展資訊現代化亦成為世界各國運輸發展政策之主要趨 勢。先進運輸科技的發展旨在應用先進的電子、通信、資訊與感測技術,整合人、車、路 的管理策略,構建智慧型運輸系統(Intelligent Transportation System, ITS)。智慧型運輸系統 之資訊與應用可進行緊急事件管理、廢氣排放管理、商用車輛管理、通行費收取管理、交 通控制、大眾運輸管理、資訊提供及未來整體運輸規劃等。由智慧型運輸系統之應用與其 間相互的配合可確實達到交通資訊的即時傳遞與應用,不只有助益於旅行者作行前路線規 劃與運具選擇,在旅程中也提供旅行者足夠的相關道路資訊與路線導引。更進一步來說, 運輸系統管理部門可透過智慧型運輸系統達到即時交通控制增進運輸效率的目標。 因此,在先進交通管理系統(ATMS)運作環境下,「動態分析」與「即時控制」是兩 大重點,本計畫則著重在「動態分析」的基礎研究。在模式的結構中,路段的車流模式主 要用於描述車流在路段中的運作行為,路網模式則必須描述動態路徑選擇行為,及路網模 式與路段車流模式之間的關係,期使整體動態路網分析模式在理論分析上更具完整性,本 研究成果也是在先進交通管理系統(ATMS)運作環境下的重要理論基礎。
二、研究目的與重要性
路段旅行時間之估算與預測資訊是交通預測模式與道路服務水準績效所需的資料。而 發展智慧型運輸系統的同時,所需的路段旅行時間亦由靜態的路段旅行時間轉變為動態, 甚至即時的路段旅行時間,尤其在交通量指派與動態路線導引之應用上,即時路段旅行時 間預測之正確性,顯得尤其重要。否則,指派或導引錯誤會使用路人對系統失去信心,失 去發展智慧型運輸系統的原意。另外,在路網整體管理策略的使用上,若沒有動態或即時 的路段旅行時間預測,亦無法評估策略的優劣,加以評選執行方案,或配套的交通控制措 施。 由動態車流相關文獻可知,模式之構建越形複雜,模擬所耗費的時間亦較久,則更難 達成提供即時資訊之目的。在缺乏高效率的計算儀器下,本計畫決定採用最被大家所熟悉 的 LWR 車流模式,作為開發動態分析模式的初始架構,倘若在未來的研究中,擁有更高效 率的計算儀器時,則可考慮將 LWR 模式取代掉,採用更具描述性的車流模式以計算路段旅 行時間並提供即時性的資訊。 在路網模式部分應探討「動態路徑決策行為」的準則是什麼? 既有文獻的重點多數存在 「均衡旅行時間」之基本想法(即時均衡、逐日均衡),這些行為假設與實際的現象是否一 致? 路網模式能確實呈現嗎?因此,本研究主要目的將探討這些課題,並進一步適當的模式化,以作為路網模式構建的主要依據,並進而探討「路網模式」與「路段車流模式」在行 為上與理論上的意義,並據以構建整合性模式。
三、文獻回顧
3.1 路段車流模式
Lighthill 與 Whitham (1955a, 1955b) 及 Richards(1956) 首先將流體的行為引用至描述 交通車流行為,以波動方程式(Wave Equation)來解釋車流行為,此方程又稱之為連續方 程式(Continuity Equation)。主要是用來描述波的傳遞現象。方程式的由來一般均以守恆律 推得,依據不同問題的型態與描述的現象會有不同的守恆律,如:弦波通常是由動量守恆 律(Momentum Conservation Law)導出、水波以流量守恆律(Flux Conservation Law)導出。LWR 模式則是利用交通上之流量守恆律以及流量與密度間函數的關係。因此應用於描述交通車 流行為之波動方程式又稱為 LWR 模式。此模式之基本假設有二: (a) 觀察者觀測的路段的長度夠長,觀測的時間亦夠長,使之足以觀察到通過的車子 (b) 觀察者觀測的路段的長度夠短,觀測的時間亦夠短,使之觀察到的觀測值仍具有變 化。 第一點假設之目的在於消除觀察流量值與密度值劇烈變動的情形。第二點假設之目的 則在於保持觀察流量值與密度值變動的性質,使之不至於成為長期觀測的平均值。此二假 設使得原本離散的流量與密度觀測值對距離(x)與時間(t)成為連續函數,進而分析討論。 LWR 模式為經由車流量守恆律(Flow Conservation Law)導出,為了滿足流量守恆律,需限 制其所描述之車流狀況如下,「一路段上沒有出口(Exits)或入口(Entrances),而且沒有車輛 在其間產生(Created)或消失(Disappear),也就是沒有路邊停車(Parking)或車禍(Collision)的情 形,此路段對車輛數而言會滿足流量守恆律。」方程式為 ) ( ) , ( ) , ( ) , ( 0 k f u t x u t x k t x q x q t k = ⋅ = = ∂ ∂ + ∂ ∂ (1) 此模式除了可以表達車流之行進變化之外,尚可應用在瓶頸(Bottleneck)路段及交通號 誌(Traffic Signal)等密度波會發生衝擊波現象的交通狀況中。所謂的衝擊波是由多個性質不 同的波接觸的界面形成。由於交通車流之波方程式描述的是密度波,因此車流之衝擊波係 指兩個或以上之車流密度波相遇之界面。May(1990)將交通衝擊波的型態分為六種,前方穩 定(Frontal Stationary),發生於車流中之瓶頸位置;向後形成的衝擊波(Backward Forming); 向前回復的衝擊波(Forward Rrecovery);後方穩定的衝擊波(Rear Stationary);向後回復的衝 擊波(Backward Recovery);向前形成的衝擊波(Forward Forming),許多研究亦利用衝擊波之 發生,進行阻斷性車流之分析,如:號誌化路口、事故發生路段之車流特性研究。
由於LWR模式所能描述的車流現象有限,Payne(1971)在原LWR 模式之一階波動方
程式之外,另考慮了一個動量方程式(Momentum Equation),計算車子在加速及慣性作用
uk q x k k v u k u T x u u t u x q t k e = ∂ ∂ − − = ∂ ∂ + ∂ ∂ = ∂ ∂ + ∂ ∂ ) ( 1 0 (2) 其中,q:流量、k:密度、u:速率、T:駕駛者之反應時間、 dk du v e 2 1 − = 為預測係數。 其後 Papageorgiou(1990)改善 Payne 之 高階 模式,利 用尤拉 近似 分解形式 (Euler-like Discretize Form),即以 ∂ ∂ + − − = ∂ ∂ + ∂ ∂ x k k k v u k u T x u uV t u e( ) ] [ 1 (3)
取代公式(2)之第二式,改善Payne模式在電腦上的執行效率。Michalopoulos、Yi與Lyrintzis (1993)亦以Payne之高階模式為基礎提出半黏滯模式,考慮駕駛者調整車速至自由車流速率 的時間延遲(Relaxation),也將自由車流速率調整為隨車輛在道路上的位置而改變。其模 式與前者不同處在以公式(4)取代公式(2)之第二式。 ∂ ∂ − − = ∂ ∂ + ∂ ∂ x k ak u x u k T x u u t u b f( ) ] [ ) ( 1 (4) 又Michalopoulos等另外提出一黏滯性模式,以下式取代公式(2)之第二式。 2 2 x k hk x k ak x u u t u b p ∂ ∂ + ∂ ∂ − = ∂ ∂ + ∂ ∂ (5) Michalopoulos等考慮將交通車流中的衝突,以一個黏滯項(Viscosity Term)來表示。
實際上,若將半黏滯模式中的鬆弛項以黏滯項替換,即可導出黏滯性模式。半黏滯與黏滯 模式的特點在於不需要平衡狀態下之密度與流量(或密度與速率)的關係式為何,且能將 車流的變化平滑地處理,消除傳統模式車輛行進行為瞬間變化的情形,較能描述動態車流 變化漸進的行為。另外,在號誌化路口之模式構建方面,Michalopoulos、Stephanopoulos、 Pisharody (1980) 則導出一描述號誌路口下游車流行為之數學分析模式,同時亦利用衝擊波 分析處理號誌造成的影響,與先前之衝擊波分析不同處在於模式中考慮了等候車隊造成的 影響。Michalopoulos與Pisharody (1980) 則另外建立號誌化路段模式探討車隊變化,發現 車隊不只是在接近紅燈時會有壓縮(Compression)的現象發生,即使在綠燈或下游路段沒 有號誌也會發生。 Michalopoulos 與 Stephanopoulos (1981) 發展出一以路口總延滯最小化 為目標,以等候車隊長度為限制之單一路口即時(Real Time)控制策略。此策略導出一新 的車流模式,同時處理號誌路口兩衝突車流之等候車隊,解決了傳統模式無法克服之鎖死 問題(Lock-up)(Ross,1988)。
Del Castillo、Pintad與Benitez (1995a) 亦以Payne模式為基礎,導出一與車流密度有關 之駕駛者反應時間函數,並與其他 Payne 模式之延伸模式以及 LWR 模式比較,結果發現
Payne模式與LWR模式計算出之結果沒有顯著的差異。此外,Del Castillo等人將模式線性 化討論其穩定性,同時也將其導出之反應時間函數代入跟車模式中比較分析,結果顯示在 模式中加入隨機項可以描述交通車流之不穩定現象。Del Castillo等人(1995a, 1995b) 則導出 一泛函型式(Functional Form)的速度密度關係式: ) ,...., , , , , (k kj vf cj n1 np F V = (6)
其中,kj與cj =q'(k) 分別為擁 擠 密度與擁擠 波速,vf 為 自由車流速 度(Free-flow Speed),n1…..np則為一些無維度(Nondimensional)的調整參數。其模式主要源自於速度、密 度與流量間的關係及傳統跟車模式分析。 Daganzo (1995) 提出一可將傳統之連續方程式有效離散化的特殊型態有限差分法,一 般的有限差分法遇到衝擊波,也就是密度不連續時,計算出之數值解會劇烈的振動不收斂。 Daganzo 提出之方法在起使條件與邊界條件不連續時,均能收斂到原方程式之解。其原理 是令傳回之函數值為兩相鄰格點中較小者,傳回值之來源有二:其一是上游網格傳遞過來 之密度值;其二是下游網格接受函數之傳回值。並以漸進函數分析其誤差,發現誤差與與 切割的格點、波速、密度變化率及起始條件有關,且其數值方法之誤差較 Lax一階中央差
分(First-order, Centered Differenc)法小。Daganzo (1997) 發展二車種與特殊車種專用車道
之車流模式,特殊車種專用道意指用標線或特殊鋪面標示出供限定車輛使用之車道,如: 高乘載車輛專用道、公車專用道。利用一組偏微分方程分別描述不同車道之行為,並考慮 兩車道車流之互動。模式實際上為基本之兩LWR方程,再加上一額外的參數表示各車種的
比例。模式之求解方法採用有限差分法(Finite Difference Method)求取數值解。
除了以LWR模式之外,Baker (1981) 與Daganzo (1994) 亦提出不同觀念之動態巨觀模 式。 Baker (1981) 考慮車流連續性、擁擠、擴散性與流動性之物理特性,以速度為主要觀 點,引進速度場(Velocity Field)之觀念構建速度勢函數(Velocity Potential)模式。亦有 學者更進一步推導出車流之氣體動力模式(Hydrodynamic Model),仍以擁擠車流與車隊擴 散情況為探討重點,導出之波動方程為一以道路末端為自由車流之邊界條件的分子散播方 程(Dispersive Equation),此即為量子力學中著名之薛丁格方程(Schrodinger Equation), 用以分析號誌路口週期性變化之車流特性。Daganzo (1994) 以網格(Cell)傳遞的觀念構建 單一進出公路車流之時空變化,包括:車隊之形成、傳遞與擴散現象。利用網格傳遞的目 的與流體動力學之衝擊波分析相同,希望找出密度變化的位置,也就是密度不連續的位置, 如:車隊末端。但 Daganzo 的網格模式較傳統衝擊波分析簡便,且對於停停走走的車流亦 能描述。 3.2 路網動態路徑決策行為模式 Mahmassani 等一系列動態模擬模式研究成果(DYNASMART),應用於逐日動態交通 分析上,僅考慮單一迄點下、平行路徑的巨觀車流模擬相當具代表性,(Chang et al.,1985)。 模式中包含了兩個主要的部分: (a) 一特殊巨觀粒子的車流模擬方式。 (b) 使用者決策法則,用以考慮在不同資訊供給的狀況下,個體行為決策的考慮,如出 發時間,路徑的選則等。 模 式 後 來 被 延 伸 至 考 慮 即 時 資 訊 下 的 路 徑 選 擇 , 並 加 入 一 路 徑 產 生 處 理 模 組 , (Jayakrishnan,1994)。為了因應資訊與動態交通管理的考慮,許多交控措施與策略也被結合 於模式中,(Hu et al, 1992; Mahmassani et al.,1994; Hu ,1995)。
在不同資訊條件的考慮與設計下,不同的資訊可能會被提供給駕駛者,而可能提供給 駕駛者的基本資訊包含了路徑資料,路徑與旅行時間。在這個狀況下,駕駛者可能會注意 到最佳的路徑,但不一定會遵從此一資訊。在模擬指派模式中,對使用者行為的模擬及指 派中的考慮是一個重要的要素,唯有在適當的行為法則考慮下,即時資訊對路網的衝擊,
方有可能被適當的反應。DYNASMAART中具兩個不同的法則來考慮駕駛者路徑轉換的行 為,一是由Mahmassaui與Stephan提出的Boundary-rational模式,另一是對車內無資訊系 統的駕駛者所提出。
另一以即時均衡指派為基礎之研究領域則有:Merchant與Nemhauser (1978a; 1978b)在
動態模型發展的早期,以數學規劃方法構建了動態交通量指派模型,簡稱M-N模型。其模
型 為 一 離 散 型 、 單 一 迄 點 、 非 線 性 且 非 中 凸(nonconvex)的 動 態 系 統 最 佳 化(Dynamic System-Optimal, DSO)路徑選擇模型。Carey (1986)繼續延伸M-N模型,證明M-N模型之限
制式滿足線性獨立的條件,使M-N模型之K-K-T條件確實成立。Carey (1987)則將M-N模
型重新建構為中凸(Convex)非線性數學規劃模型,並證明其模型具有解的存在性與唯一
性。此模型不管在分析性及易求解性上皆較M-N模型良好。
Janson (1991)則提出一時間離散化之動態用路人均衡問題(Dynamic User Equilibrium, DUE)的模型。該模型假設在同一時區中,用路人動態路徑選擇行為與靜態用路人均衡行為 相同,且可透過流量轉換關係加入路徑流量在時間向度上必須連續的額外限制。故一般稱 此模型為準動態(Quasi-Dynamic)路徑選擇模型。原則上,其建構動態用路人均衡模型可視 為靜態用路人均衡路徑選擇模型加上流量傳導限制後的一般化問題。由於限制式含有 0-1
整數變數,為非中凸性問題。而Boyce et al. (1997)則採用Janson的動態用路人均衡路徑選 擇模型,針對美國芝加哥之北西郊區路網,進行大型路網測試。
Luque 與 Friesz (1980)首先以最佳化控制理論構建動態系統最佳化(DSO)路徑選擇模
型。其後,陸續有學者如 Matsui (1987)、Ran與Shimazaki (1989a)、Friesz et al. (1989)、 Wie (1989)、Wie et al. (1990) 亦 採 用 最 佳 化 控 制 理 論 進 行 DSO 及 DUO(Dynamic User-Optimal)模型的研究。以上所提之研究所構建的最佳化控制模型,皆將路段流入率視
為控制變數,而將路段流出率視為路段車輛數的函數。但是若此函數形態為非線性函數時, 則無法建構一包括多對旅次起迄對之路網。Ran 與 Shimazaki (1989b)將路段流出率簡化為
控制變數,並建立相對應的DUO模型,此項改善大幅降低模型的運算複雜度。其後,Ran et al. (1993)則將流量傳導限制式加入最佳化控制模型,提出一有別於前的DUO路徑選擇模
型。Ran與Boyce (1994)針對上述模型加以改善而分別提出瞬時性及理想性的DUO模型,
並陸續發展動態系統最佳化、動態用路人最佳化出發時間/路徑選擇、動態用路人最佳化運
具/出發時間/路徑選擇選擇、機率型動態用路人最佳化路徑選擇等模型。Wei (1993, 1995)
則應用最佳化控制理論與非合作 N 人非零和微分賽局理論(Non-Cooperative N-Person Nonzero-Sum Differential Game Theory)來檢核動態均衡問題中的動態混合選擇行為。最佳化
控制問題較難求解,尤其是在如此複雜的動態路網上,至今雖已有學者發展出不同的演算 法,如Ran與Shimazaki (1989b)所提出的時間分解演算法(Time Decomposition Algorithm, TDA)、Boyce et al. (1991)所應用的Frank-Wolfe演算法、Cordina與Barcelo (1991)所提出的
時間分解演算法、Wie et al. (1994)提出之擴張拉氏法(Augmented Lagrangian Algorithm, ALA)
以及 Wei et al. (1995)所提出的離散型巢化成本運算子法(Discrete Nested Cost Operator Approach)等等。但是因為在這些演算法中皆包括若干的簡化過程,皆不盡完善,仍有相當 的改善空間。 Friesz et al. (1993)以變分不等式構建一個連續型的動態用路人均衡之出發時間/路徑選 擇問題。Smith (1993)亦以變分不等式、不動點理論、極小化問題等構建動態用路人均衡之 交通量指派模型,文中著重在先進先出的限制,並證明在路徑流量集合為中凸、路徑成本 函數為連續之下,存在動態用路人均衡解。上述兩者因其模型皆以路徑變數為基礎,求解 時必須窮舉各起迄對所有可能的路徑,在實際應用上有其困難之處。Ran 與 Boyce (1996)
也應用變分不等式構建一路徑基礎式 DUO 模型,其中包括瞬時性(Instantaneous)與理想性 (Ideal)兩類,因為在其分析架構下,無法建構出與其對等的路段基礎式DUO模型,故其引 入更多的變數,以另外構建一個路段基礎式DUO模型。故其路段基礎式的變分不等式模型 中的函數型式及變數數目多且複雜,以其理想性模型為例,其函數除了路段成本外尚包含 了該路段與旅次起點的最短矩離,而其欲求解的路段流量變數尚須區分來自那一旅次起迄 對,變數數目增加,在利用計算機求解時可能需要龐大的記憶體空間。以此為中心,Ran
與Boyce (1996)陸續發展出動態用路人最佳化出發時間/路徑選擇(Ran et al., 1996)、動態用 路人最佳化運具/出發時間/路徑選擇選擇、機率型動態用路人最佳化路徑選擇等模型。Chen and Hsueh (1996, 1998a)提出一時空路網建構方式,成功的界定動態流量形態中的路段流入 率與路段流出率、路段車輛數之間清楚的轉換關係。故決策變數被簡化為路段流入率。在 此基礎下,並證明動態路徑選擇問題,因成本函數具非對稱性,故無相對應的最佳化模型 存在。之外,進一步以變分不等式構建一路徑基礎的動態用路人最佳化路徑選擇模型,並 更將其對等轉換為路段基礎的動態用路人最佳化路徑選擇模型。嚴謹的數學證明更證實其 所提出模型與用路人最佳化條件之間的對等性。此變分不等式模型不管是函數型式或決策 變數都較簡化,可以視為靜態交通量指派問題增加時間向度上之流量傳導限制的一般化問 題。之後,Chen與Hsueh並以此為基礎,繼續發展路段基礎的出發時間/路徑選擇模型(Chen
與Hsueh, 1998b)、動態系統最佳化路徑選擇、變動需求之動態用路人最佳化路徑選擇、動 態用路人最佳化旅次路徑選擇、動態用路人最佳化運具/路徑選擇以及整合交通號誌時制設 計之動態路徑選擇模型等,進而完成一套較完整的預測型動態用路人均衡旅運選擇之網路 均衡理論(Chen, 1999)。韓復華、卓訓榮與黃銘崇 (2001) 針對每日尖峰時段的通勤旅次, 構建每日動態調整模式,模式中包含路徑流量變化率方程式及 ITS 預估旅行時間變化率方 程式。文中分析模式的穩定狀態(Steady State)及穩定性(Stability),且證明該模式為漸進穩 定,但所用以計算路段旅行時間的方式較為簡單,仍有待改善。
Ran與 Boyce (1996)則應用對角化法固定交互影響的觀念,先固定實際旅行時間與從起
點至各點的最短旅行時間,將路段基礎式的變分不等式模型轉換最佳化控制模型以求解, 當時間離散化後,此最佳化控制模型則可再轉換為非線性規劃模型,則可以 Frank-Wolfe
演算法求解其所提出之動態用路人最佳化路徑選擇變分不等式模型。Chen與Hsueh (1998a)
則應用巢化對角法(Nested Diagonalization Method, NDM)求解其所提出之時間離散化/路段
基礎式動態用路人最佳化路徑選擇變分不等式模型。巢化對角法是透過逐層固定路網中的 交互影響,來求解變分不等式模型。第一層運算乃固定實際旅行時間,第二層運算則固定 其他時空路段流入率之影響,即可獲得非線性規劃動態用路人最佳化路徑選擇模型,第三 層則以Frank-Wolfe求解第二層運算所獲得之模型。其與Ran與Boyce (1996)所提出的方法
相較起來,最根本的差異性在於模型使用變數種類,Ran與Boyce (1996)所建構的時空路網
因為必須包括路段流入率、路段流出率、路段車輛數等三類變數,時空路網相當複雜,且 求解變數數目最少是Chen與Hsueh (1998a, 1998b)演算法的三倍以上。張佳偉(1997)利用梯
度投影法與個體單形分解法兩種路徑演算法,求解Chen與Hsueh (1996, 1998a)所提出之動
態用路人均衡路徑選擇模型。並透過數值例測試結果證實梯度投影法的求解速度比個體單 形分解法及Frank-Wolfe演算法更快。Chen et al.(1999)則以中型路網之中壢—平鎮路網進行
測試,係應用梯度投影法求解動態用路人均衡路徑選擇模型。王中允(1999)將梯度投影法與
個體單形分解法兩種路徑演算法,與拉氏法及擴張拉氏對偶法結合,求解含路段容量限制 之動態用路人均衡路徑選擇模型。結果發現;結合拉氏法、擴張拉氏對偶法與梯度投影法 之演算法的求解績效較高。
四、模式構建
本研究所構建的動態車流路網模擬模式,乃是利用LWR模式求得路段平均旅行時間, 再透過每日動態調整模式(韓,2001)的運作機制,求得每日尖峰時段的通勤旅次在趨於穩定 時的流量分佈型態。因此,本章可分為兩部分,第一部分為LWR模式路段旅行時間計算機 制,第二部分為每日動態調整模式,其相關細節分述如下。 4.1 路段成本函數 以往在計算路段成本時,多以公式(7)這種型態的函數來計算旅行時間,其中Aa、Ba分 別為路段a的相關參數,Ca為通過路段a所花費的旅行時間,而Ka為路段a的容量,fa則 為路段a的流量。 4 ) ( ) ( a a a a a a K f B A f C = + (7) 以公式(7)這種函數來計算路段旅行時間是過於籠統的,因為參數的設定應隨地點而 異,且參數校估不容易。故,在本研究中以另一種計算旅行時間的機制來求得路段上的平 均旅行時間。本研究在計算旅行時間時,乃是採用 LWR 模式所求解出的運行速度 v(x,t), 作為計算旅行時間之工具,其相關細節如下所示。 首先,假設路段上沒有出入口或交叉路口,亦沒有車輛在路段上產生或消失,則此路 段上的車輛數會滿足流量守恆律 (Lighthill與Whitham,1955、Richards,1956)。LWR模式如 (8)所示。 ) ( ) , ( ) , ( ) , ( 0 k f u t x u t x k t x q x q t k = ⋅ = = ∂ ∂ + ∂ ∂ (8) 第二步,利用有限差分法將 LWR模式離散化,則可得 LWR模式的有限差分方程式, 如(9)所示,其中,kjn+1為在空間點xj,時間點tn+1的密度近似值,qnj+1為在空間點xj+1,時 間點tn的流量近似值,而Δ
x為離散模式中的單位空間距,Δ
t為單位時間距。 2 2 1 1 1 1 1 n j n j n j n j n j q q x t k k k + + − ⋅ + − − ∆ ∆ − + = (9) 第三步,由於速度為密度的函數,將流量-密度-速度關係式與速度-密度關係式結合(例 如Greenshields model),以推導出流量-密度關係式。且將路段上的流量fa轉為LWR 模式 的邊界條件,即每單位時間路段的流入量。 第四步,將 LWR 車流模式搭配起始條件與邊界條件構建成起始值-邊界條件連續方程 式後,並求解之,即可求得每個時間點、空間點的密度近似值及速度近似值。 第五步,利用LWR模式所求得的各個時間點、空間點之速度近似值,以推估通過路段 a所花費的平均旅行時間。所採用的計算機制如(10)所示。(
)
M d l v x Min t Min C m m j m m i L d D l m j m i m a∑
∑
∈ ∈ ∆ ∆ = , ( , ) , ,ε
(10) 其中,Ca表示通過路段a所需花費的平均旅行時間;m為在時間點m時流進路段a的車隊;M為總車隊數;Lm與Dm分別為車隊 m在路段a上通行時,於時空平面上所跨越的 每個時空點所成之空間集合與時間集合,lim及 djm分別為空間集合 Lm與時間集合 Dm的組 成元素(Element);v(lim, djm)為在空間點lim、時間點djm之速度值;ε為在時間點djm時的餘 留空間距(ε≦
Δ
x),如圖1所示。 圖 1 餘留空間距示意圖 求得路段的平均旅行時間後,將路段旅行時間加總以求得網路中路徑的旅行時間,進 而將其值代入每日動態調整模式中,以分析路徑流量及路徑旅行時間的變化。 4.2 每日動態調整模式 在本研究乃引用韓復華等人 (韓,2001) 所構建的每日動態調整模式,作為構建動態車 流路網模擬模式之基礎。每日動態調整模式包括兩個微分方程式,一者代表路徑流量變化 率,另一者代表ITS預估旅行時間變化率,模式內容如(11)所示。 0 ) ( ) ( , 0 ) ( ) ( ) ( ˆ 0 ) ( ) ( , 0 ) ( ) ( ) ( ˆ ) ( ) ( ) ( ˆ , 0 )] ( ˆ )) ( ( [ , )] ( ˆ )) ( ( [ 1 0 , 0 )] ( ˆ )) ( ( [ , )] ( ˆ )) ( ( [ 1 -0 , )] ( ˆ )) ( ( )[ ( ) ( 0 ) ( ˆ )) ( ( , )] ( ˆ )) ( ( )[ ( ) ( < ∑ ∈ − > > ∑ ∈ − − > ∑ ∈ − > > ∑ ∈ − ∑ ∈ − = + ∈ < − − > > > − − > > − = < − − − = w P p hp t t w T w P p hp t t w T t w c w P p hp t t w T w P p hp t t w T t w c w P p hp t t w T dt t w c d N r r t w c t h p c r t w c t h p c r t w c t h p c r t w c t h p c otherwise r t w c t h p c t p h dt t p dh t w c t h p c and even is r if r t w c t h p c t p h dt t p dh 當 當 為一常數且 且 當 當 是一常數且 β β β β α α α α α (11) 其中,Cp(h(t))為某日(t)、某路徑(p)、路徑流量h(t)的實際旅行時間,Pw為起迄對(w)所 有路徑所成之集合;cˆ tw( )為某日(t)、某起迄對(w),由ITS所提供的預估旅行時間;hp(t)為 某日(t)、某起迄對(w)、路徑(p)的流量值;假設ITS以一遞減函數Tw(t)=f(cˆ tw( ))預測在不同 預估旅行時間(cˆ tw( ))下,起迄對(w
)的旅運需求。五、模式求解
本研究所構建的動態路網分析模式,乃是利用 LWR 模式求得路段平均旅行時間,再透 過每日動態調整模式的運作機制,求得每日尖峰時段的通勤旅次在趨於穩定時的流量分佈 型態,此流量分佈型態將滿足動態用路人均衡。而在求解模式時,LWR 模式以有限差分法 進行求解即可,故本章著重在求解每日動態調整模式。由於每日動態調整模式為一階微分 方程組(System ODEs),本研究採用高階Runge-Kutta法(Nakamura,1993)進行求解,主要 乃因為高階Runge-Kutta法的準確度高,可大量降低誤差值。為方便表示求解過程,將每日 動態調整模式以較為簡單的方式表示,如(12)所示。 = = ) ( ˆ ), ( ) ( ˆ ) ( ˆ ), ( ) ( t w c t p h g dt t w c d t w c t p h f dt t p dh (12) 在本研究中乃採用第三階的Runge-Kutta法來求解每日動態調整模式。求解在第n+1天 時某路徑(p)的路徑流量值hp(tn+1) 以及第n+1天時ITS所提供的某起迄對(w)預估旅行時間 值 cˆw(tn+1)之推導過程如(13)所示,其中
ΔT
為一天。 ) 4 ( ) ( ˆ ) ( ˆ ) 4 ( ) ( ) ( 3 2 1 6 1 1 3 2 1 6 1 1 3 3 2 2 1 1 2 2 1 ) ( ˆ , 2 2 1 ) ( 2 2 1 ) ( ˆ , 2 2 1 ) ( 1 2 1 ) ( ˆ , 1 2 1 ) ( 1 2 1 ) ( ˆ , 1 2 1 ) ( ) ( ˆ ), ( ) ( ˆ ), ( G G G t c t c F F F t h t h T G T F T G T F T G T F n w n w n p n p G G n t w c F F n t p h g G G n t w c F F n t p h f G n t w c F n t p h g G n t w c F n t p h f n t w c n t p h g n t w c n t p h f + + + = + + + ⋅ ∆ = ⋅ ∆ = ⋅ ∆ = ⋅ ∆ = ⋅ ∆ = ⋅ ∆ = + + = + − + − + − + − + + + + (13) 透過第三階的Runge-Kutta法求解每日動態調整模式,並選擇適當的α及β值,利用第 n天時路徑流量值hp(tn)及 ITS所提供的預估旅行時間值 ˆ ( n) w t c ,以求得第n+1天時路徑 流量值hp(tn+1)及預估旅行時間值 ˆ ( n+1) w t c ,亦即依據今日所得之資訊以推求次日的資訊。 當 ( 1) p( n) n p t h t h + − 及 ˆ ( 1) ˆ ( n) w n w t c t c + − 之值皆滿足停止條件(Stop Rules)時,該演算法即可停 止,且求得趨於穩定時路網的流量分佈型態及 ITS 所提供的預估旅行時間。 依據今日所得之資訊以推求次日的資訊之原則符合實際之狀況;用路人根據 ITS 所提 供的今日路網相關資訊(包括路徑流量及旅行時間等)作為次日路徑選擇之依據。所以,當 未 達 穩 定 狀 態 時 , 用 路 人 的 選 擇 行 為 會 逐 日 變 動 , 直 到 整 個 路 網 達 穩 定 狀 態 時 ,) ( ) ( 1 p n n p t h t h + − 及 ˆ ( 1) ˆ ( n) w n w t c t c + − 之值皆滿足停止條件(Stop Rules),此時用路人不會因單 方面的路徑改變而使其旅行時間降低,滿足動態用路人均衡。
六、範例分析
本章將以一簡單的網路作為模擬對象,該網路為一小型的高速公路單車道網路,其幾 何型態如圖 2 所示。只有一組起迄對w
=(1,4),路徑 1 由路段 1 與路段 4 所構成,路徑 2 由路段 2 與路段 5 所構成,而路徑 3 則由路段 1、路段 3 與路段 5 所構成。各路段的長度 為{L1,L2,L3,L4,L5}={30,55,25,55,30}。模式相關參數值為α=-0.003,β=0.11,γ=1,旅 運需求固定為一常數,T
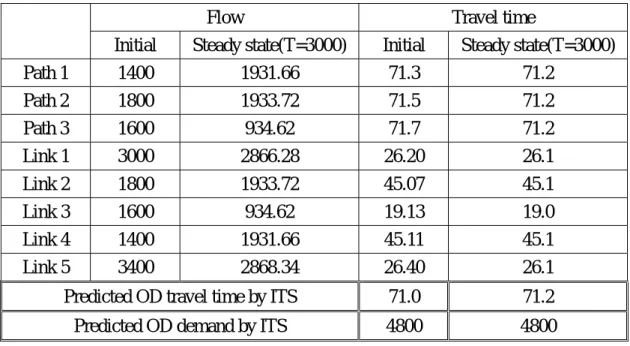
w(t)
=4800,起始路徑流量{h1,h2,h3}={1400,1800,1600},ITS 起始 預估旅行時間cˆ tw( )=71.0。模擬結果如表 1 及圖 3、圖 4 所示。 圖 2 範例網路幾何型態圖 從表1中,可觀察得知,透過每日動態調整模式的每日疊代關係,當達穩定狀態時(Time Step=3000),三條路徑的旅行時間相同,而預估旅行時間亦一致,代表整個路網達到動態用 路人均衡。此外,在穩定狀態下,三條路徑的流量等於起迄對(OD)的旅運需求。 在圖 3 中,淺灰色曲線為路徑 1 的旅行時間變動曲線,灰色曲線為路徑 2的旅行時間 變動曲線,黑色曲線為路徑3的旅行時間變動曲線,而黑色虛線則為 ITS預估旅行時間的 變動曲線。可以發現在模擬的前半段時間,曲線振盪的較為劇烈,之後曲線的振盪則減緩, 有逐漸達動態用路人均衡之趨勢。 在圖 4 中,淺灰色線為 ITS 所預測之旅運需求曲線。本範例中,假設起迄點的旅運需 求固定為一常數值,故旅運需求曲線為一水平直線。黑色虛線則為三條路徑總流量變動曲 線,可以發現在模擬的前半段時間,曲線振盪的較為劇烈,之後曲線的振盪則減緩,逐漸 趨近於旅運需求。 1 4 3 2 5 4 1 3 2表 1 流量與旅行時間起始值與均衡值之比較表
Flow Travel time
Initial Steady state(T=3000) Initial Steady state(T=3000)
Path 1 1400 1931.66 71.3 71.2 Path 2 1800 1933.72 71.5 71.2 Path 3 1600 934.62 71.7 71.2 Link 1 3000 2866.28 26.20 26.1 Link 2 1800 1933.72 45.07 45.1 Link 3 1600 934.62 19.13 19.0 Link 4 1400 1931.66 45.11 45.1 Link 5 3400 2868.34 26.40 26.1
Predicted OD travel time by ITS 71.0 71.2 Predicted OD demand by ITS 4800 4800
20 40 60 80 100 120 time step 71.2 71.4 71.6 71.8 72 travel cost 圖 3 路徑旅行時間與預估旅行時間變動調整圖
20 40 60 80 100 120 time step 4798 4800 4802 4804 圖 4 旅運需求與三條路徑總流量變動調整圖
七、結論與後續研究方向
本研究提出一路段旅行時間的新估算方式,乃是利用 LWR模式所求得的運行速度作為 計算路段旅行時間之依據。此外,應用高階Runge-Kutta法求解動態車流路網模式,以使誤 差值降低。在本研究中,對一簡單網路進行模擬,發現達到均衡後,有流量的路徑其旅行 時間小於或等於ITS所提供的預估旅行時間,滿足用路人均衡的指派原則。 在本研究中,是採用LWR模式並針對一簡單網路進行模擬,但在實際網路中,道路的 環境應更為複雜。故在未來的研究中,應進一步將模式擴展成適用於有號誌路口或多車道 之道路環境,符合實際路網型態,以達應用之目的。 此外,本模式所需的模擬時間約為15分鐘。當模擬的道路環境漸趨複雜時,由於所構 建的模式之複雜度增加,以及所需處理的資料量增多,所需耗費的運算時間勢必將增長。 為達提供即時資訊之目標,有必要透過平行計算(Parallel Computing)的處理技術以縮短運算 時間。因此,利用平行計算(Parallel Computing)處理技術加快求解模式將為另一項重要的研 究課題。八、研究成果自評
本研究的主要貢獻有三: (1) 傳統路段旅行成本的計算方式應隨地點的不同,而變動其參數,但當路網龐大 時,一一校估每個路段的旅行成本函數之參數太過耗時,應用上受到侷限。因 此,在本研究中提出另一種路段旅行時間計算方式,克服傳統路段旅行成本的 缺點,利用路段車流模式求得每一時間-空間對的運行速度,並進一步將運行速 度轉換為旅行成本,最後推求出平均旅行時間。這種作法符合實際路網中的巨 觀車流行為。 (2) 由於每日動態調整模式為一階常微分方程組(System ODEs),每一方程式裡的變數彼此相關,所以需採用一整體方程組的求解方式求解之。在本研究中不採用
Euler 法求解方程組,主要乃因為 Euler 法的準確度不高,若要提高準確度,則
需採用非常小的間隔值(Step Interval),這反而會增長演算時間。在本研究,由於 每日動態調整模式的間隔值(Step Interval)為一天,為使準確度提高且不致增長演 算時間,乃採用第三階(Three Order)Runge-Kutta法求解方程組,克服了Euler法 的求解缺點。 (3) 將車流模式與動態路網分析模式結合。在路網的路段上,利用車流模式描述車 輛的行為,由於在本研究中是採用巨觀的車流模式,所以可將車輛的行為視為 波的傳遞現象。在整體路網中,則利用動態路網分析模式來描述及分析用路人 的路徑選擇行為。用路人依據今日所得的資料來決定次日所選擇的路徑,為一 動態變動的行為,且該行為最後會趨於穩定,亦即每一位用路人不會因個人的 單方面改變路徑而使其本身的旅行時間降低,此時達到動態用路人均衡。 本研究之內容與原計畫相符,完成構建一動態車流路網模擬模式之目標。但本研究仍 有可供延伸之空間。在路段車流模式方面,可進一步構建更具描述力的車流模式以符合實 際交通環境。在演算時間上,除了發展更具智慧性的演算法來求解模式外,亦可將平行計 算(Parallel Computing)併入模擬模式中,加快求解速度,以達在ATMS運作環境下提供即時 更新的道路資訊供用路人參考。
參考文獻
1. Baker, R. G., 1981, “A Model of Traffic Dispersion from a Congested Road”, Transportation
Research Part B 15(5) (1981), pp.319-327.
2. Boyce, D. E., Lee D. H., Janson B. N. and Berka S., “Dynamic User-Optimal Route Choice Modeling of a Large-Scale Traffic Network”, Journal of Transportation Engineering, ASCE 23(4) (1997), pp. 276-282.
3. Boyce, D. E., Ran, B. and Le Blanc L. J., “Dynamic User-Optimal Traffic Assignment: A New Model and Solution Techniques”, Presented at The First Triennial Symposium on
Transportation Analysis (Montreal, Canada), 1991.
4. Carey, M., “A Constraint Qualification for a Dynamic Traffic Assignment Model”,
Transportation Science 20 (1986), pp. 55-58.
5. Carey, M., “Optimal Time-Varying Flows on Congested Network”, Operations Research 35(1) (1987), pp. 58-69.
6. Chang, G. L., Mahmassani, H.S., and Herman, R., “A Macroparticle Traffic Simulation Model to Investigate Peak-Period Commuter Decision Dynamics”, Transportation Research
Record 1005 (1985), pp.107-120.
7. Chen, H. K. and Hsueh, C. F., “A Dynamic User-Optimal Departure Time/Route Choice Problem Using a Link-Based Variational Inequality Formulation”, Journal of Transportation
Engineering, ASCE 124(3) (1998b), pp. 246-254.
Link-Based Variational Inequality Formulation”, Paper Presented at The 5th World Congress
of the RSAI Conference ( Tokyo, Japan), 1996.
9. Chen, H. K. and Hsueh, C. F., “A Model and an Algorithm for the Dynamic User-Optimal Route Choice Problem”, Transportation Research Part B 32(3) (1998a), pp. 219-234.
10. Chen, H. K., Dynamic Travel Choice Models: A Variational Inequality Approach, Lecture
Notes in Economics and Mathematical Systems, (Springer-Verlag, Berlin), 1999.
11. Cordina, E. and Barcelo, J., “An Algorithm for Dynamic Traffic Assignment Model Based on Optimal Control Approach”, Presented at The First Triennial Symposium on
Transportation Analysis (Montreal, Canada), 1991.
12. Daganzo, C. F., “A Continuum of Traffic Dynamics for Freeways with Special Lanes”,
Transportation Research Part B 31(2) (1997), pp.83-102.
13. Daganzo, C. F., “A Finite Difference Approximation of the Kinematic Wave Model of Traffic Flow”, Transportation Research Part B 29(4) (1995), pp.261-276.
14. Daganzo, C. F., “The Cell Transmission Model: a Dynamic Representation of Highway Traffic Consistent with the Hydrodynamic Theory”, Transportation Research Part B 28(4) (1994), pp.269-287.
15. Del Castillo, J. M., and F. G. Benitez, “On The Functional Form Of The Speed-Density Relationship-I: General Theory”, Transportation Research Part B 29(5) (1995a), pp.373-389.
16. Del Castillo, J. M., and F. G. Benitez, “On The Functional Form Of The Speed-Density Relationship-II: Empirical Investigation”, Transportation Research Part B 29(5) (1995b), pp.391-406.
17. Friesz, T. L., Bernstein, D., Smith, T. E., Tobin, R. L. and Wie, B. W., “A Variational Inequality Formulation of the Dynamic Network User Equilibrium Problem”, Operations
Research 41 (1993), pp. 179-191.
18. Friesz, T. L., Luque, F. J., Tobin, R. L. and Wie, B. W., “Dynamic Network Traffic Assignment Considered as a Continuous Time Optimal Control Problem”, Operations
Research 37(6) (1989), pp. 893-901.
19. Hu, T. Y. and Mahmassani, H.S., “Evolution of Network Flows Under Real-Time Information: A Day-to-Day Dynamic Simulation-Assignment Framework”, Transportation
Research Record 1493 (1995), pp.46-56.
20. Hu, T. Y., Rothery, R. W., and Mahmassani, H.S., “DYNASMART: Dynamic Network Assignment-Simulation Model for Advanced Road Telematics”, Technical Report DTFH61-90-C-00074-TWP1 (Center for Transportation, The University of Texas at Austin, January), 1992.
21. Janson, B. N., “Dynamic Traffic Assignment for Urban Road Networks”, Transportation
Research Part B 25 (1991), pp. 143-161.
22. Jayakrishnan, R., Tsai, W. K., Prashker, J. N. and Rajadhyaksha, s., “A Faster Path-Based Algorithm for Traffic Assignment”, Presented at The transportation Research Board 73rd
Annual Meeting (Washington, D. C., U.S.A.), 1994.
23. Lighthill, M. J. and Whitham , G. B., “On Kinematics Waves I. Flood Movement in Long Rivers”, Proceedings Royal Society, A229 (London, 1955a), pp. 281-316.
24. Lighthill, M. J. and Whitham , G. B., “On Kinematics Waves II. A Theory of Traffic Flow on Long Crowded Road”, Proceedings Royal Society, A229 (London, 1955b), pp. 317-345. 25. Luque, F. J. and Friesz, T. L., “Dynamic Traffic Assignment Considered as a Continuous
Time Optimal Control Problem,” Presented at The TIMS/ORSA Joint National Meeting (Washington, D. C., U.S.A.), 1980.
26. Mahmassani, H.S., Hu, T.Y., Peeta, S., and Ziliaskopoulos, A., “ Dynamic Traffic Assignment and Simulation Procedures for ADIS/ATMS Applications”, Technical Report DTFH61-90-R-0074-FT, (Texas at Austin), 1994.
27. Matsui, H., “A Model of Dynamic Route Choice”, Text of Infrastructure Planning Lectures,
JSCE 18 (1987), pp. 84-96.
28. May, A. D., Traffic Flow Fundamentals ( Prentice Hall, Englewood Cliffs, NJ, 1990).
29. Merchant, D. K. and Nemhauser, G. L., “A Model and an Algorithm for the Dynamic Traffic Assignment Problems”, Transportation Science 12(3) (1978a), pp. 183-199.
30. Merchant, D. K. and Nemhauser, G. L., “Optimality Conditions for a Dynamic Traffic Assignment Model”, Transportation Science 12(3) (1978b), pp. 200-207.
31. Michalopoulos, P. G., and V. Pisharody, “Plaoon Dynamics On Signal Controlled Arterial”,
Transportation Science 14(4) (1980), pp.365-396.
32. Michalopoulos, P. G., G. Stephanopoulos, “An Application of Shock Wave Theory to Traffic Signal Control”, Transportation Research Part B 15 (1981), pp.35-51.
33. Michalopoulos, P. G., G. Stephanopoulos, and V. B. Pisharody, “Modeling of Traffic Flow At Signalized Links”, Transportation Science 14(1) (1980), pp.9-41.
34. Michalopoulos, P. G., P. Yi and Lyrintzia, A. S., “Development of an improved High Order Continum Traffic Flow Model”, Transportation Research Record 1365 (1993), pp.125-132. 35. Nakamura, S., “Applied Numerical Methods in C”, Prentice-Hall International Inc, 1993. 36. Papageorgiou, M., “Dynamic Modeling, Assignment, and Route Guidance in Traffic
Network”, Transportation Research Part B 24 (1990), pp.471-495.
37. Payne, H. J., “FREFLO: a Macroscopic Simulation Model of Freeway Traffic”,
38. Ran, B. and Boyce, D.E., Dynamic Urban Transportation Network Models: Theory and
Implications for Intelligent Vehicle Highway Systems (Lecture Notes in Economics and
Mathematical Systems, Springer-Verlag, New York), 1994.
39. Ran, B. and Boyce, D.E., Modeling Dynamic Transportation Network: An Intelligent
Transportation System Oriented Approach ( Springer-Verlag, New York), 1996.
40. Ran, B. and Shimazaki, T., “A General Model and Algorithm for the Dynamic Traffic Assignment Problems”, Proceedings of the Fifth World Conference on Transport Research (Yokohama, Japan), 1989a.
41. Ran, B. and Shimazaki, T., “Dynamic User Equilibrium Traffic Assignment for Congested Transportation Networks,” Presented at The Fifth World Conference on Transport Research (Yokohama, Japan), 1989b.
42. Ran, B., Boyce D. E. and Le Blanc, L. J., “A New Class of Instantaneous Dynamic User-Optimal Assignment Models”, Operations Research 41(1) (1993), pp. 192-202.
43. Ran, B., Hall, R. W. and Boyce, D. E., “A Link-Based Variational Inequality Model for Dynamic Departure Time/Route Choice”, Transportation Research Part B 30(1) (1996), pp. 31-46.
44. Richards, P. I., ”Shock Waves on the Highway”, Operations Research 4 (1956), pp. 42-51. 45. Ross, P., “Traffic Dynamics”, Transportation Research Part B 22(6) (1988), pp.421-435. 46. Smith, M. J., “A New Dynamic Traffic Model and the Existence and Calculation of
Dynamic User Equilibria on Congested Capacity-Constrained Road Networks”,
Transportation Research Part B 27 (1993), pp. 49-63.
47. Wie, B. W., “Dynamic System Optimal Traffic Assignment on Congested Multidestination Networks”, Presented at The Fifth World Conference on Transport Research (Yokohama, Japan), 1989.
48. Wie, B. W., Friesz, T. L. and Tobin, R. L., “Dynamic User Optimal Traffic Assignment on Congested Multidestination Networks”, Transportation Research Part B 24 (1990), pp. 443-451.
49. Wie, B. W., Tobin, R. L. and Friesz, T. L., “The Augmented Lagrangian Method for Solving Dynamic Network Traffic Assignment Models in Discrete Time”, Transportation Science 28 (1994), pp. 204-220.
50. Wie, B. W., Tobin, R. L., Bernstein, D. and Friesz, T. R., “A Comparison of System Equilibrium Dynamic Traffic Assignments with Schedule Delays”, Transportation Research
Part C 3(6) (1995), pp. 381-411.
51. Wie, B. W., Tobin, R. L., Friesz, T. L. and Berstein, D., “A Discrete Time, Nested Cost Operator Approach to the Dynamic Network User-Equilibrium Problem”, Transportation
Science 29 (1995), pp. 79-92. 52. 王中允,「路段容量限制動態用路人旅運選擇模型之研究」,