http://jvc.sagepub.com/
http://jvc.sagepub.com/content/7/5/741
The online version of this article can be found at:
DOI: 10.1177/107754630100700508
2001 7: 741
Journal of Vibration and Control
Yon-Ping Chen and Huai-Te Hsu
Sliding-Mode Theory
Regulation and Vibration Control of an FEM-Based Single- Link Flexible Arm Using
Published by:
http://www.sagepublications.com
can be found at: Journal of Vibration and Control
Additional services and information for
http://jvc.sagepub.com/cgi/alerts Email Alerts: http://jvc.sagepub.com/subscriptions Subscriptions: http://www.sagepub.com/journalsReprints.nav Reprints: http://www.sagepub.com/journalsPermissions.nav Permissions: http://jvc.sagepub.com/content/7/5/741.refs.html Citations:
What is This?
- Jul 1, 2001
Version of Record
>>
Link Flexible
Arm
Using Sliding-Mode
Theory
YON-PING CHEN
HUAI-TE HSU
Department
of Electrical
and ControlEngineering,
NationalChiao-Tung
University,
Hsinchu, Taiwan 300,Republic of China
(Received 24 November 1997; accepted 19 May 1999)
Abstract: Compared to the assumed-mode method (AMM), the finite-element method (FEM) is not only
more applicable to the modeling of various kinds of flexible structures but also better in
estimating
the naturalfrequencies.
Motivated from these features and modified from the work of Yeung and Chen for an AMM-basedmodel, the sliding-mode controller introduced in this paper is developed to deal with the regulation problem
and vibration suppression of an FEM-based single-link flexible arm. This paper will focus on the issue of how
to change the FEM-based model into a form similar to the AMM-based model via the Schur decomposition. A technique to measure the well-estimated state variables required for the control is also presented.
Finally,
numerical simulation results are given to verify the robustness of the modified sliding-mode controller againstpayload variation.
Key Words: Flexible arm, FEM-based model, sliding mode, vibration control
1.
INTRODUCTION
The mathematical model of a flexible structure can be
approximately
derivedby using
the assumed-mode method
(AMM)
or the finite-element method(FEM)
(Junkins
andKim,
1993).
Both methods have beenwidely applied
to diverseapplications (Bayo,
1987;
Cannon andSchmitz, 1984;
Chang
andChen, 1997; Matsuno, Murachi,
andSakawa, 1994;
Yeung
and
Chen,
1989).
It isrecognized
that the FEM isgenerally
moreapplicable
to themodeling
of various kinds of flexible structures andusually
also better inestimating
the naturalfrequencies.
Motivatedby
thesefeatures,
this paper introduces asliding-mode
control forthe FEM-based
single-link
flexible arm to treat vibrationsuppression.
The
sliding-mode theory
(Utkin, 1977;
Itkis,
1976)
is one of theimportant
robust controltheories.
Recently,
manyinvestigators
havepaid
attention to thesliding-mode
control of therobotic flexible arm; for
examples,
seeYeung
and Chen(1989)
and Nathan andSingh
( 1991 ).
In the work of
Yeung
and Chen(1989),
the authorssuccessfully developed
a robustsliding-mode controller with
respect
to thepayload
variation for the AMM-basedsingle-link
flexiblearm. Most
significantly,
they proposed
asystematic
scheme to choose thesliding
functionbased on the AMM-based model. The determination of a
sliding
functionis, however,
aneffort for conventional
sliding-mode
controllerdesign.
Therefore,
toadopt
theirsliding-mode
control
appropriately,
it is necessary tochange
the FEM-based model into a form similar toand
Van Loan,
1989)
for thesymmetric
inertia and stiffness matrices.By using
the Schurdecomposition,
the FEM-based model isdecomposed
into twosubsystems:
one is for the lower naturalfrequencies
and the other for thehigher
naturalfrequencies.
Sinceonly
the lower naturalfrequencies
are wellestimated,
the FEM-based model is further reducedby
neglecting
all the terms related to thehigher
naturalfrequencies.
Mostimportant,
sucha reduced FEM-based model is
expressed
in a similar fashion to the AMM-based model.Therefore,
itssliding-mode
controllerdesign
can bedeveloped
by modifying
the workproposed by
Yeung
and Chen(1989)
for the AMM-based model.Furthermore, n
strain gaugesare
required
to obtain the variables for the FEM-based controlinput
when the flexible arm isconsidered to possess n
equal-length
segments.
Note that the number of the strain gauges isthe same as that needed for an n-mode AMM-based model.
The next section will derive the reduced FEM-based model. In Section
3,
a modifiedsliding-mode
controller isdeveloped
to deal with vibrationsuppression.
The robustness tothe
payload
variation of thesliding-mode
control will be illustratedby
simulation results shown in Section 4.Finally,
theconcluding
remarks aregiven
in Section 5.2.
REDUCED
FEM-BASED MODEL OF A SINGLE FLEXIBLE ARMBased on the finite element method
(Junkins
andKim,
1993),
thedynamic equations
of asingle-link
flexible armmoving
in a horizontalplane,
shown inFigure
1,
can be derived in astraightforward
manner.First,
the flexible arm is assumed to possess nequal-length
segments
with a concentrated
payload
m, at thetip position.
Further define vi and v
2 as thebending
deflection and
slope
of the ithsegment
at theright
end.Then,
by using
Hamilton’sprinciple,
the FEM-baseddynamic equations
of asingle
flexible arm can be derived aswhere 0 is the rotor’s
angular
position
and urepresents
the controltorque
andbending
variables v =
(v i v 2 v i v
2 ... V
i V 2 ~T .
It is noticed that{m~Hi~M~}
are allfunctions
of mt
and<M~,K~
meBmeV
are allsymmetric positive-definite
~
mov MvvJ j
matrices. For
convenience,
when a variable is related to thepayload
mt or the ith segment,1 :::; i <
n, it will be denoted with asuperscript
t or i. Thepayload
mt isuncertain,
bounded betweenmm’n
andmmax,
with a nominal valuem~
( E [~~’&dquo;,
mmaxl ) _
Since v possesses 2n
variables,
2n naturalfrequencies
will result from(1). By
using
theSchur
decomposition
(Golub
and VanLoan,
1989),
thesymmetric positive-definite
matrixMvv
can beexpressed
aswhere U is an
orthogonal
matrix,
A is apositive diagonal
matrix,
and N =A1~2U.
LetKvN
=N-T
Kvv
N-1,
which is alsosymmetric positive-definite.
Onceagain, by using
the Schurdecomposition,
we haveK,,N
=pT
HP,
where P is anorthogonal
matrix and His aFigure 1. Single-link flexible arm.
where L = PN. Note that all the matrices
A, S2, N,
P,
and Ldepend
on thepayload
mt.Since P is
orthogonal,
thatis,
PT P
=I,
from(2)
it can be obtained thatLet y = Lv =
( yl
...
y2&dquo; ~ T ,
then(1)
can be rewritten aswhere
b(ml )
=L ~ni~.
Clearly,
in case thatb
=0,
a vibration motion can be deducedfrom
(5)
as below:with OJ1 < OJ2 < ... < OJ2n. This means the FEM-based model possesses 2n natural
frequencies
from OJ1 to cv2&dquo; . It is known that the lower n naturalfrequencies
of a flexiblearm are well estimated
by
~1 to co,.However,
unlike col to OJn, thehigher
frequencies
a~&dquo;+1 to cv2n do not
correspond
to anyphysical
naturalfrequencies.
Anapproximate
FEM-based model is
usually
obtainedby
neglecting
all thecomponents
related to thesehigher
frequencies
OJn+1 to OJ2n. Suchapproximation
is conceivable since the accumulated energy offrequencies higher
than COn isgenerally
much smaller than that of lowerfrequencies
from OJ1 to ~&dquo; .Besides,
to further make theapproximate
model moreprecise,
the number of naturemodes n is often
carefully
selected so as not to excite anycomponent
withfrequency
higher
than mn via theapplied
controlinput.
Now the FEM-based model(5)
is reduced aswhere
y
=yl
... yn ~T .
Here,
all the variablesof yh
=
[Yn+1 ...
~2~~T ,
related to OJn+1to <~2/!. are eliminated. It is
important
topoint
out that the reduced model(7)
is similar tothe AMM-based model shown in the work
of Yeung
and Chen( 1989)
and, hence,
thesliding-mode controller
developed
for(7)
will be a modified version of the controllerproposed by
them.
Under the variation
of mt
( E
IM min
jy~maxl 1 ~
the controlobj ective
is torobustly regulate
the
angular
position 0
to aspecified
value 0 d
without any vibration. Before the controllerdesign,
the main task is to obtain the variablesy
=[yl
... y&dquo;jT
required
for the controlalgorithm.
Strain gauges are used as the sensors. Eachsegment
along
the flexible armis instrumented with one strain gauge, and then n strain values are measured to be z =
[Zl
z2 ... znT .
. Thesequantities
can be related tobending
variables v as z= Gv with
G c
Rnx2n .
Since y =Lv,
we have z= r y
with r =GL-1.
It can be furtherexpressed
by
z =r 1Y
+r2Yh,
whererl
(E R&dquo;&dquo;n )
is assumednonsingular.
Theneglect Of Yh yields
z x5
rly,
thatis,
therequired
y
can be obtained asUnfortunately,
y
is still not achievable from(8)
due to the fact thatr 1 ==
rl (mt ),
depending
on the uncertain
payload
mt . To solve such aproblem,
an intuitive way is to make the nominalapproximation
Evidently,
there exists an unknown deviationy-y°,
which should becarefully
handled in thecontroller
design.
Next,
wedevelop
thesliding-mode
controller for the reduced FEM-based3. SLIDING-MODE CONTROLLER
DESIGN
The reduced model
(7)
can be rewritten into thefollowing
form:Under the uncertain
payload
mt, the controlobjective
is torobustly regulate
theangular
position 0
to aspecified
value 0 d
without anyvibration,
thatis, 8 - e d
= 0 andy
=0.
Define e = 9 - 6 d, then
(10)
and(11)
arerearranged
asIn
general,
there are two basic steps for thesliding-mode
controllerdesign.
First,
thesliding
variable is selected such that thesystem
is stabilized in thesliding
mode.Second,
the controlalgorithm
isdesigned
tosatisfy
thesliding
condition.In the first
step,
thesliding
variable is chosen to bewhere c,
c’,
aT =
[a,
a2 ...an ] ,
anda’T -
(ai
a2
...a;, )
are all constant and will bedetermined
by
thepole-placement
method. Sincey°
=ri 1 (mt )z
andy
=r11 (mt )z,
wehave
where
(a(mt)
=ri 1(m~ )rl(m~)
andQ(mo)
= I. Assume that thesystem
issuccessfully
controlled to
perform
thesliding
motion s = 0. From theconcept
ofequivalent
control(Utkin,
1977),
it can be obtained that 9 = 0 as theequivalent
control isapplied
to the system.Therefore,
differentiating (14)
yields
Now,
the system in thesliding
mode can be describedby (16)
and(13).
Note that(12)
haswhere E and
Y
are theLaplace
transforms of e andy,
respectively.
It can be found that thecharacteristic
equation
of(17)
isexpressed
by
where the coefficients c,
c’,
a, and a’ arecommonly
determinedby
thepole-placement
method.
Unfortunately,
the uncertainpayload
mi makes it morecomplicated.
In this paper,the
pole-placement
method isadopted only
for the nominal case mt -mt ,
where the characteristicequation (18)
can be written asNote that
Q(mo) =
I.According
to the workby
Yeung
and Chen(1989),
the 2n + 2coefficients
{c,
c’, aI,
ai, ... ,
a&dquo;, a;, ~
in(19)
areuniquely
determinedby assigning
2n + 2 stableeigenvalues.
Infact,
these stableeigenvalues
should becarefully assigned
such that with the coefficients obtained from the nominal case, the characteristicequation (18)
mustalso possess stable
eigenvalues
for all ml EIM min, mmax~.
If so, the robust featureagainst
thepayload
variation isguaranteed.
A rule of thumb to choose theappropriate
stableeigenvalues
for the
single-link
flexible arm was also shown in the workof Yeung
and Chen(1989).
Thispaper will
adopt
theirsuggestion
and demonstrate it in the next section.Once the coefficients
~c, c’, al, ai, ... , a&dquo; , an }
in thesliding
variable( 14)
aredetermined,
the first step of the controllerdesign
iscompleted.
The secondstep
is todevelop
the control
algorithm
tosatisfy
thesliding
condition. From(12)
and(13),
it can be obtainedthat
where A =
moo -
brb.
Since A > moo -bT b
=moo -
me Mv,,l me,,
>0,
the candidate ofLyapunov
function can begiven
as1
where the
equality
is trueonly
for s = 0. From_o _
where T = ce + c’e +
aT
y
+a’Ty°.
It can be furtherrearranged
from(8)
and(20)
aswhere
wT -
bTSZri 1.
Since w =( ) A -
0(ml), and mt
E(m~’in,mmaxl~
wewere w - ~ r, 1 lnce w = w mt , u - u mt , an mt t t , we
assume that
Jt
Let the control law be
then
where the
equality
is trueonly
for s = 0.Therefore,
V is aLyapunov
function and the system will be driven to thesliding
mode s =0,
as desired.In
practice,
theimplementation
ofsgn(s)often
generates
undesirablehigh-frequency
chattering
anddegrades
thesystem
performance.
To smooth out thechattering,
the control law ischanged
intowhere
is used to
replace
sgn(s).
As a consequence, the system is nolonger
restricted to the infinitesimalsliding
mode s = 0 but constrained in thesliding
layer ~ s ~ <
E with thickness ~. Thiscompletes
thesliding-mode
controllerdesign.
One other
important phenomenon
should be addressed here beforegetting
into the numerical simulation. It is noticed that the controlalgorithm
is derivedonly
for the reducedThey
are treated as the unmodeled terms andalways
exist in thepractical
systems.
In thenext
section,
although
the controller isdesigned
based on the reducedmodel,
the simulationis
implemented
for theoriginal
system
(1), possessing
thehigh-frequency
components.
As aresult,
the simulation results will show that thesystem
performance
isbadly
affected when the control law excites these unmodeledhigh-frequency
components.
This isespecially
truefor the
system
transient behavior beforereaching
the desiredset-point.
4.
NUMERICAL
SIMULATION
As a
demonstration,
we will carry out a numerical simulation for asingle-link
flexible arm,which has a
uniformly
distributed mass malong
the central axis and arectangular
cross-sectional area. The structural
parameters
are listed as below:. mass of the beam m = 0.332
kg
.
length
of the beam 1 = 0.950 m.
rectangular
cross-sectional area A = 4.176 x10-5
m2
. mass per unit
length p =
0.3495kg/m
.
Young’s
modulus E = 2.095 x1011 Nt/M2
.
payload
mt C~0.3, 0.5~
kg
w nominalpayload
mr
= 0.4kg
If the flexible arm is considered to possess 3
equal-length
segments,
thenaccording
tothe finite-element
method,
thedynamic equations
will be derived as(1)
with thebending
variables v =
IV 1 1v 2 v 1 v 2 v
i v 2~ T .
By
the Schurdecomposition,
thebending
variables aretransformed as y = Lv =
[Y1 ...
Y6(
and thedynamic equations
arechanged
into(5),
which contains 6 naturalfrequencies
mi to m6 and OJ1 < ~2 < ... < ~s. Note that thenatural
frequency
~~ is related to the variable yi, for i =1, 2, ... ,
6. Sinceonly
the lower naturalfrequencies
OJ1 =3.585,
C02 =
22.973,
andOJ3 = 57.097 are well
estimated,
thedynamic equations
are reduced to(7)
withy
= [Y1
y2y3~T .
From(8),
~ ~ r11z,
where z =[Zl
Z2
Z3 ]T
are measuredby
three strain gauges. The ith strain gauge is located at the middleposition
of the ithsegment.
Under the variation
of payload
mt, the controlobjective
is torobustly regulate
theangular
position 0
to aspecified
value8 d
= 7r/2 without any vibration. Define the
error functionas e = 0 - 0 d.
Then,
in the firststep
of the controllerdesign,
thesliding
variable is chosenas
where the coefficients
c, c’, aT - [ai
a2a3]
anda~ =
(ai a~ a3~
are all constant and determinedby
assigning
the roots of(19)
withIt should be
emphasized
here that if these roots are sensitive to the variation ofpayload,
thesliding-mode
controllermight
beonly
suitable for a smallregion
of mt around the nominalvalue
mt .
According
to thesuggestion by
Yeung
and Chen(1989),
the ithpair
ofcomplex
roots in
(29)
are located at theangles ±135°
on thecomplex plane
with amagnitude
cry .Later,
from the simulationresults,
it will be found that the robust featureagainst
thepayload
variation is achievedby using
theeigenvalues
in(29).
After the
sliding
variable isdetermined,
the next step is todesign
the controlalgorithm
for thesliding
condition.Following
thedesign procedure,
the control law(27)
becomeswhere
As mentioned
before,
the use ofsat (s, E )
is to ameliorate thechattering problem.
Todemonstrate the robustness of the control
law,
numerical simulation isimplemented
on theoriginal
model(1),
containing
all theneglected
terms. Inaddition,
three cases of mt-0.3,
mt= mt
=0.4, and mt
= 0.5 are considered forpayload
variation.Figures
2through
4 show the simulation results. In
Figure
2,
although
the controlalgorithm
isdesigned
for thenominal case mt =
0.4,
thetip-position
is stillsuccessfully
controlled to the desiredposition
for the other two cases mt =0.3, 0.5.
Clearly,
this verifies that thesliding-mode
control is robust to thepayload
variation.Figure
3 shows therequired
controlinputs
for these threecases, where
chattering
still existsduring
the transient 0 < t < 2. It seems that the use ofsaturation function cannot avoid the
chattering problem.
Infact,
suchchattering
is causedby
those unmodeled terms in(1)
related to m4 to OJ6, which have been included in the simulation.They,
of course, cannot beeffectively
handledby
the controlalgorithm (30),
which isonly
derived to deal with the reduced model
(12)
and(13).
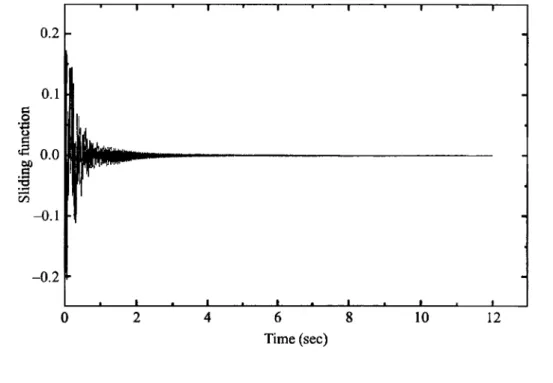
Such defect can be also seen fromFigure
4,
whichpresents
thesliding
function for mt = 0.4.During
the transient 0 < t <2,
the system
trajectory
is notcompletely
constrained in thesliding
layer < E(= 0.01).
It is because thesystem
tends to reach the controlgoal
as fast aspossible
from thestarting
time.As a
result,
the controlinput requires high-frequency
components tospeed
up thesystem
response
during
the transient.Simultaneously,
thehigh-frequency
unmodeled terms are also stimulated todegrade
thesystem
response. After thetransient,
thesystem
is well controlledto the
neighborhood
of the controlgoal.
That means the controlinput
intends to drive thesystem
to the destinationsmoothly;
therefore,
thehigh-frequency
unmodeled terms will notFigure 2. Tip angle for the cases of mt = 0.3, 0.4, 0.5 kg.
Figure 4. Sliding variable for mt = 0.4 kg.
5.
CONCLUSION
This paper
develops
asliding-mode
control of an FEM-basedsingle-link
flexible arm. Beforethe controller
design,
the FEM-based model is reduced via the Schurdecomposition
tokeep
only
the lower half of naturalfrequencies,
which are well estimated in the FEM-based model.Simulation results are included to illustrate the robustness of the
sliding-mode
controlagainst
thepayload
variation.Acknowledgment. Research was supported by National Science Council, Taiwan, R.O. C., under Contract
NSC 86-2213-E-009-056.
REFERENCES
Bayo, E., 1987, "A finite-element approach to control the end-point motion of a single-link flexible robot," Journal of Robotic Systems 4(1), 63-75.
Cannon, R. and Schmitz, E., 1984, "Initial experiments on end-point control of a flexible one-link robot," International Journal of Robotics 3(3), 62-75.
Chang, J. L. and Chen, Y P., 1997, "Force control of a single-link flexible arm using sliding-mode theory," Journal of Vibration and Control 3(4), 439-452.
Golub, G. H. and Van Loan, C. F., 1989, Matrix Computations, Johns Hopkins University Press, London.
Itkis, U., 1976, Control System of Variable Structure, John Wiley, New York.
Junkins, J. L. and Kim, Y, 1993, Introduction to Dynamics and Control of Flexible Structure, AIAA, Washington, DC.
Matsuno, F., Murachi, T., and Sakawa, Y, 1994, "Feedback control of decoupled bending and torsional vibrations of flexible beams," Journal of Robotic Systems 11(5), 341-353.
Nathan, P. J. and Singh, S. N., 1991, "Sliding-mode control and elastic mode stabilization of a robotic arm with flexible
links," Journal of Dynamic System, Measurement, and Control 113, 669-676.
Utkin, V I., 1977, "Variable structure systems with sliding mode: A survey," IEEE Transactions on Automatic Control
22, 212-222.
Yeung, K. S. and Chen, Y P, 1989, "Regulation of a one-link flexible robot arm using sliding-mode technique," Inter-national Journal of Control 49, 1965-1978.