國 立 交 通 大 學
機械工程學系
碩士論文
利用石英音叉於位移量測之研究
The Research of Displacement Measurement Utilizing
Quartz Tuning Forks
研究生:盧奕
指導教授:洪紹剛 博士
利用石英音叉於位移量測之研究
研 究 生:盧奕 Student:Yi Lu
指導教授:洪紹剛 Advisor:Shao-Kang Hung
國 立 交 通 大 學
機械工程學系
碩士論文
A thesis
Submitted to Department of Mechanical Engineering
Collage of Engineering
National Chaio Tung University
in Partiial Fulfillment of Requirements
for the Degree of Master of Science
in
Mechanical Engineering
June 2011
HsinChu,Taiwan,Republic of China
中華民國一百年六月
i
利用石英音叉於位移量測之研究
學生:盧奕 指導教授:洪紹剛
國立交通大學機械工程學系
摘要
石英音叉(quartz tuning fork, QTF)是一種壓電振盪器,運
用在計時電路,其後被衍生運用在量測許多物理量上,如:
力、加速度和位移等。而本論文主要研究如何延長石英音叉
在位移上的量測範圍,實驗結果顯示本論文提出的的位移感
測器之量測範圍可達到 100
m,且在此量測範圍最佳解析度
ii
The Research on Displacement Measurement Utilizing
Quartz Tuning Forks
Student:Yi Lu Advisors:Shao-Kang Hung, Ph.D.
Department of Mechanical Engineering
National Chiao Tung University
ABSTRACT
A quartz tuning fork is a kind of piezoelectric resonators. Quartz tuning forks can
be modified as sensors to measure various properties, such as force, acceleration,
displacement, and many other ones. A method to extend the measurable range of a
quartz tuning fork based displacement sensor is devised in this paper. The
experimental results demonstrate that the linear measurable range of the proposed
iii
誌謝
感謝老師 洪紹剛教授願意收我為學生,於這兩年來仔細教導我做實驗的技 巧、心得和觀念等等,還給我出國參加國際會議的機會,使我能與各國學者交流 和上台報告實驗時團隊的研究成果,讓我的國際觀突飛猛進,並交到一些加拿大 和美國的朋友。對於這些從老師身上得到的經驗、知識,實在是萬分感謝。也感 謝呂宗熙教授於教導我動力學等許多知識,讓我有機會可以上研究所,並且也於 口試時指點我實驗應該注意的地方。 也感謝建哥、瓜瓜、佑麒和松哥學長,百忙之中也會抽空來指導我們做實驗, 並適時給予足夠的資源。特別是建哥,即使畢業也不間斷的回來教導我們,並持 續到我們這些學弟口試前,並且分享許多出去就業後的心得。感謝同學鄭喬華和 陳立剛在學業還有研究上的幫忙和共同研究。感謝碰北、正龍、尼歐、建樺和承 燁等學弟們在我研究繁忙時給予協助,並且彼此在研究上互相幫忙,相輔相成。 感謝我的父母能給予我專業、精神和生活上的支援,使我能毫無顧忌的完成 我學業及研究,並且感謝舍弟能給予我精神上適當的刺激。最後僅以此文獻給我 親愛的家人。 盧奕 2011-7-26iv
目錄
摘要... i Abstract ... ii 致謝... iii 目錄... iv 圖目錄... v 一、緒論... 1 1.1 研究動機... 1 1.2 文獻回顧... 2 1.2.1 石英音叉發展... 2 1.2.2 位移感測器... 9 1.3 本研究之目標... 12 二、預備知識... 13 2.1 石英音叉之特性... 13 2.2 樑的撓度... 17 三、石英音叉應用於位移感測之設計... 19 3.1 石英音叉規格... 20 3.2 懸臂梁... 23 3.3 電路設計... 24 3.4 雷射位移感測器... 25 3.5 位移帄台... 27 3.6 鎖相放大器... 28 3.7 實驗設計... 29 四、實驗與探討... 31 4.1 第一部分實驗... 31 4.2 第二部分實驗... 35 4.3 第三部分實驗... 38 五、結論與展望... 54 六、參考文獻... 55v
圖目錄
圖 1.2.1 石英錶內部構造... 2 圖 1.2.2 石英音叉製作流程 ... 3 圖 1.2.3 雙石英音叉加速規 ... 4 圖 1.2.4 雙石英音叉陀螺儀 ... 5 圖 1.2.5 感測氣體的石英音叉裝置 ... 6 圖 1.2.6 石英音叉應用於原子力顯微鏡之構造圖 ... 7 圖 1.2.7 石英音叉振幅與頻率關係圖 ... 8 圖 1.2.8 石英音叉運用於掃描探針顯微術圖 ... 8 圖 1.2.9 雙石英音叉原子力顯微鏡 ... 9 圖 1.2.10 電容式位移感測器 ... 10 圖 1.2.11 電感式位移感測器探針頭和剖面圖 ... 11 圖 2.1.1 正逆壓電效應圖 ... 13 圖 2.1.2 石英音叉實體圖 ... 14 圖 2.1.3 石英音叉電極分布圖 ... 15 圖 2.1.4 石英音叉受力之輸出訊號圖 ... 16 圖 2.2.1 樑的撓度原理圖 ... 17 圖 2.2.2 樑的撓度原理圖 ... 18 圖 3.0.1 石英音叉位移感測器原理圖 ... 19 圖 3.1.1 石英音叉規格意示圖 ... 20 圖 3.1.2 石英音叉的固定圖 ... 21 圖 3.1.3 石英音叉的固定流程圖 ... 22 圖 3.1.4 石英音叉的固定完成圖 ... 23 圖 3.2.1 光纖實體圖 ... 24 圖 3.3.1 電路圖 ... 25 圖 3.3.2 電路實體圖 ... 25 圖 3.4.1 雷射位移感測器實體圖 ... 25 圖 3.4.3 光纖與壓電材料固定於雙軸位移帄台圖 ... 26 圖 3.5.1 三軸壓電帄台圖 ... 27 圖 3.6.1 鎖相放大器運作圖 ... 28 圖 3.7.1 設備架構關係圖 ... 29 圖 4.1.1 第一部分實驗意示圖 ... 31 圖 4.1.2 第一部分實驗儀器實體圖 ... 31 圖 4.1.3 石英音叉之位移與輸出訊號關係圖 ... 32 圖 4.1.4 頻譜圖 ... 33 圖 4.2.1 第二部分實驗儀器意示圖 ... 34 圖 4.2.2 第二部分實驗儀器實體圖 ... 34vi 圖 4.2.3 石英音叉量測位移特性圖 ... 35 圖 4.2.4 石英音叉受力影響推測圖 ... 36 圖 4.2.5 雙光纖蕊心結構圖 ... 36 圖 4.3.1 第三部分實驗儀器意示圖 ... 38 圖 4.3.2 第三部分實驗儀器實體圖 ... 38 圖 4.3.3 第三部分實驗光纖與石英音叉接觸圖 ... 39 圖 4.3.4 石英音叉與光纖的改變參數意示圖 ... 39 圖 4.3.5 光纖長度 33mm 的各點接觸位置特性圖 ... 40 圖 4.3.6 光纖長度 28mm 的各點接觸位置特性圖 ... 41 圖 4.3.7 光纖長度 23mm 的各點接觸位置特性圖 ... 42 圖 4.3.8 光纖長度 18mm 的各點接觸位置特性圖 ... 43 圖 4.3.9 光纖長 23mm 的各接觸點比較圖 ... 44 圖 4.3.10 Position C 改變光纖長度比較圖 ... 45 圖 4.3.11 位移 0m、20m 和 40m 的電壓隨時間變化圖 ... 46 圖 4.3.12 位移 60m、80m 和 100m 的電壓隨時間變化圖 ... 47 圖 4.3.13 頻寬量測示意圖 ... 48 圖 4.3.14 各 time constant 之波德圖振幅部分(1) ... 49 圖 4.3.15 各 time constant 之波德圖振幅部分(2) ... 50 圖 4.3.16 time constant 和頻寬比較圖 ... 51 圖 4.3.17 time constant 和雜訊比較圖 ... 51 圖 4.3.18 頻譜圖 ... 52 圖 4.3.19 位移和共振頻率關係圖 ... 52 圖 4.3.20 位移和共振振幅關係圖 ... 53
1
一、 緒論
1.1 研究動機
位移感測器(displacement sensor)顧名思義是用來量測物體移動距離的感測 器,目前科技已經發展出各種擁有各自特色的位移感測器,被廣泛運用在各式各 樣的地方,例如:現在汽車在倒車時,駕駛者有時會因為視角問題而無法確定車 後方是否有障礙物,若車尾設置超音波位移感測器,藉由超音波碰觸障礙物而反 彈回感測器,駕駛便可以精準確定車體和後方障礙物精準的距離;或者是被運用 在精密儀器上,利用位移感測器量測一物件的表面是否帄坦、工件之間的相對距 離,如雷射位移感測器可以被應用在原子力顯微鏡上,測量探針的相對位置,使 得原子力顯微鏡(atom force microscopy, AFM)可用來掃描微小物件。運用許多基本的物理和電子原理,市售上已發展出五花八門的位移感測器。 追求的性能有量測距離、解析度、耐久度等,如雷射位移感測器擁有高解析度, 且因使用雷射作為量測,不需接觸樣品,故不會有磨損問題,且運用近代光學原 理,其解析度也佳,但會因樣品表面的反射特性影響,故無法應用在各式各樣的 場合上且成本昂貴,故萌發了是否有辦法製作出低成本,解析度高,耐久度好的 位移感測器。在考慮了許多條件下,我嘗試使用了石英音叉(quartz tuning fork, QTF),並且研究此工件之特性,簡言之此研究將探討石英音叉在位移感測方面的 應用。
2
1.2 文獻回顧
1.2.1 石英音叉發展 石英音叉最初是被運用在石英錶內,作為一產生規律頻率的震盪器,其原理 是石英為一種壓電材料,當壓電材料被輸入一電壓訊號時,其體積會產生改變並 產生振盪,故送入特定頻率電壓並激發石英音叉使其產生共振時,音叉會產生出 一規律性電流訊號,利用此訊號便可達到計時的功能。於 1960 年,Max Hetzel 研發出了石英錶,使用的石英音叉頻率為 360Hz,如圖 1.2.1 所示。而現在市 售石英錶大多使用共振頻率為 32.768kHz 的石英音叉,其誤差約為 0.5s/day。 圖 1.2.1 石英錶內部構造3 etching 在已經鍍好電擊金屬的石音錶面進行侵蝕,其步驟如圖 1.2.2 所示[11], 依需從(a)到(h)一步步把音叉部分和電擊都做出來。 圖 1.2.2 石英音叉製作流程[11] 隨科技演進,學者們發現石英音叉在振盪時受到極微小外力時,其輸出訊號 之頻率、振福和相位皆會產生相對應之變化,且 quality factor 可達到數千甚 至數萬,解析度可到達 牛頓。於是石英音叉便開始被嘗試運用在測量溫度、
4
加速度、壓力和氣體液體特性等。溫度方面,於 2009 年,由 Jun Xu, Bo You, Xue-fei Zhao[1]等人發表的石英音叉溫度感測器,最初讓石英音叉運作的頻率接近共振 頻率(32.768kHz),並嘗試增高石英音叉所處環境之下的溫度,測出溫度和頻率的 線性關係,最後結果得到可以量測的溫度範圍為 到 ,且解析度為 。加速度方面,於 1986 年 William J. Kass 和 Gary S. Snow[2]兩人所發表 的雙石英音叉加速規,將石英音叉末端部分相接,利用訊號產生器同時震盪兩石 英音叉並加上一質量塊來使其受加速度時產生形變,藉此觀察加速度和輸出訊號 之關係,其量測範圍可達正負 120G,解析度為 1.0Hz/G,可運行之溫度為-50 至 +85 ,如圖 1.2.3 所示。 雙石英音叉 質量塊 固定端 圖 1.2.3 雙石英音叉加速規[2]
也有學者利用雙石英音叉來製作陀螺儀,於2004年由Kenji Sato, Atsushi Ono[3]等人人所研發的陀螺儀,如圖1.2.4所示,運用兩石英音叉相接,觀測受角 速度而影響的輸出訊號,製作出量測範圍為正負90deg/s的陀螺儀。
5
圖 1.2.4 雙石英音叉陀螺儀[3]
壓力方面,於 1986 年由 M. Ono, M. Hirata, K. Kokubun, H. Murakami, H. Hojo, H. Kawashima, H. Kyogoku[4]等人發表的石英音叉壓力計,利用石英音叉直接感 測靜態壓力之變化或者測量周遭環境的空氣密度,並對應不同的共振電路之下, 量測範圍可從 0.01Torr 至 1000Torr。氣體種類辨識方面,已經有 Anatoliy A. Kosterev, Frank K. Tittel, Dmitry V. Serebryakov, Alexander L. Malinovsky 和 Igor
V. Morozov[5]等人於 2005 年發表其團隊研究出的利用石英音叉分析氣體之化學 結構。Ulrike Willer, Claus Romano, Wolfgang Schade[12]等人利用 LED 燈產生紅 外線透過高壓氣體後,照射在石英音叉上,石英音叉輸出訊號便會產生相對應變 化,如圖 1.2.5 所示。
6 圖 1.2.5 感測氣體的石英音叉裝置[12] 關於感測距離方面,目前學者們於近十幾年來已經運用許多物理原理製作出 了幾種掃描探針顯微鏡,工作原理為將感測元件貼近樣品表面,感測元件與樣品 表面產生各類的反應,擷取其中的光、電、力、熱等訊號,達到檢測表面的功能, 如:感測原子間作用力的原子力顯微鏡、感測穿隧電流的電子掃描顯微鏡、感測 電位差的表面電位顯微鏡和感測電化電流的掃描電化顯微鏡等等。因為石英音叉 可以探測到原子間作用力和音叉本身振動時末端的振幅大小為奈米等級這兩種 特性,故學者們利用此工件來製作上述幾種顯微鏡。 目前石英音叉較常見是被運用於原子力顯微鏡,在石英音叉末端銜接上極微 小之探針,如圖 1.2.6 所示,運用精密位移帄台使探針接近樣品表面,間接讓音 叉本身感應原子間作用力,使其振盪振幅和共振頻率產生變化,藉此來達到掃描
7
的功能。且音叉本身可視為振盪器,其振盪振幅大小約幾奈米,如圖 1.2.7 所示 [14],不需要外加振盪器使銜接探針的懸臂量產生共振和光學位移感測器來探測 懸臂量或探針之位移,並且適合在靠近樣品後而不會因接觸或碰撞樣品而影響最
後掃描結果。Yu-Hsuan Lin, Chien-Ying Su[13]等人及利用石英音叉運用於掃描探針顯
微術方面。把石英音叉當作振盪元件,於其振盪端黏著一光纖探針,並且利用力
學回饋控制石英音叉,當光纖探針送入雷射訊號,藉由自製的回饋電路系統,收 集資料後分析,來達到掃描的作用,如圖 1.2.8 所示。
8
圖 1.2.7 石英音叉振幅與頻率關係圖[14]
圖 1.2.8 石英音叉運用於掃描探針顯微術圖[13]
9 M. Heyde 和 H.-J. Freund[6]幾位學者所發表之雙石英音叉原子力顯微鏡,令兩石 英音叉末端以直角相接定在真空低溫(4 )的環境下運作,一個擔任振盪器的作 用,另外一個擔任感測器功能感測振幅變化,量測振幅的訊號不僅單純轉換成探 針和樣本的位移數據還能作為回饋控制音叉的振幅和頻率,以便達到良好的掃描 資料,如圖 1.2.9 所示。 圖 1.2.9 雙石英音叉原子力顯微鏡[6] 1.2.2 位移感測器 位移感測器(displacement sensors)隨著科學進步發展出許多種類,各有其優 缺點,當要量測位移時須因應當下需求來選擇適當的位移感測器,以達到最佳的 量測性能。目前較廣泛之市售精密定位位移感測器,例如:(1)渦電流式位移感 測器、(2)電容式位移感測器、(3)電感式位移感測器、(4)線性變量差動變壓器、 (5) 雷射位移感測器。 渦電流式位移感測器主要原理是利用金屬板通過的磁場大小改變時,金屬板
10
表面會產生漩渦狀的感應電流(冷次定律)。故感測器可偵測渦電流大小來計算出 預偵測物體的相對運動。優點有:非接觸可避免磨損、抗油汙、結構穩固、線性 等。而缺點有:其量測距離受限於量測線圈的直徑大小、量測物件的材質。2001 年 Pan Haifeng, Zhu Huizhong, Fu Zhibin, Xu Yusheng, Feng Guanping[17]等人發 表了一篇對於新型的渦電流長距離位移感測器來改進其量測距離受限於線圈大 小的缺點。製作出來的渦電流感測器運作環境溫度為 18~30 ,量測位移為 40mm, 解析度為 125mV/mm。 電容式位移感測器主要是利用電極帄板的相對位置改變時,其電容值會因應 其變化量而改變來達到量測位移的功能,由於其結構簡單,故成本低,且測量時 並不接觸待測物,故可避免磨損,但電容易受到溫度而產生變化,且電路易影響 其電容大小。其量測範圍依照設計不同可從數微米到數毫米,如圖 1.2.10 所示, 電容感測器靠近已接地之待測物,測量兩表面間之電容值,並換算成位移。 圖 1.2.10 電容式位移感測器[15]
11
電感式位移感測器基本設計是使用一個可自由移動的鐵磁性材料蕊心在線 圈中移動,移動過程中會使電感產生變化,再透過線圈與振盪電路連接,使得電 感產生變化時,振盪電路的輸出頻率會產生相對應的變化,便可用來測量位移, 且此種感測器解析度高,成本低,如圖 1.2.11 所示。於 2008 年 Mirjana S. Damnjanovic, Ljiljana D. Zivanov, Laszlo F. Nagy, Snezana M. Djuric,和 Branimir N.
Biberdzic[7]等人發表增加量測範圍的新型電感式雙軸位移感測器,讓感測器的線 性區域提升 1.7 倍左右。
線圈 鐵磁性軸
圖 1.2.11 電感式位移感測器探針頭和剖面圖[16]
線性變量差動變壓器(linear variable differential transformer, LVDT)原理類似 變壓器,主要差別為變壓器之鐵心為固定,然而 LVDT 為可動,故利用可動的鐵 心可以影響次及線圈之電壓感應量,使其電壓會隨著鐵心的移動產生變化。
雷射位移感測器在目前已發展出利用干涉儀、都卜勒或反射等原理來運用在 感測距離。干涉儀主要是利用雷射光打到目標後,其反射光和入射光會產生破壞 性或建設性干涉特性來感測距離。雷射都卜勒測距儀主要是發射多種不同頻率之
12 脈波列,並偵測經反射的雷射訊號,經分析後,即可得知目標物的位移。
1.3 本研究之目標
本研究之目標是利用石英音叉為主要元件來製作出可運作之位移感測器,想 法起源是因石英音叉為一非常精密且成本十分低的元件,而目前在量測距離之應 用上只應用於掃描探針顯微鏡上,量測範圍僅限於奈米等級,故思考增加其量測 距離到微米等級,且同時具有奈米等級的解析度,想必是個十分具有潛力之研究 題材。 達成本研究之方法是利用韌性較低的長條狀物體,使之固定於待測物體上, 利用物體因產生位移產生形變和觸碰石英音叉的所施予力之大小,來觀測石英音 叉的輸出訊號變化,初步估計能運作範圍為幾十微米,解析度可達 50 奈米,能 運用在精密儀器的定位上,如偵測壓電致動器之位移或者做為精密位移帄台之回 饋感應器。在目前市售之微米感測器,電感式、電容式或者是雷射位移感測器等, 其量測範圍和解析度與此研究大同小異,但所需製程技術和成本不小,故價格也 不低。所以本研究不僅單純運用石英音叉在以前學者沒有嘗試過的領域使其產生 成效,也希望量測出來的微米位移特性可以在解析度、量測範圍、不易受環境因 素影響等劣於現有市面上的,且成本更加低廉。13
二、 預備知識
2.1 石英音叉之特性
石英音叉主要為石英所建構而成,且石英此材質為一種壓電材料。壓電材料 特性為當此物給予一偏壓時,此物體會依電壓之大小、方向以及其位置,而產生 不同的形變,其變化量為微米等級甚至達到奈米等級,此稱之為逆壓電效應,如 圖 2.1.1 所示,壓電材料在給予一偏壓後,於箭頭方向的長度產生變化量。若當 壓電材料受到外部施力 F 而產生形變,則可量測到相對應之電壓大小,此則稱為 正壓電效應。 F F 伸長+
V -壓電材料 壓電材料逆壓電效應
正壓電效應
圖 2.1.1 正逆壓電效應圖14 由於石英音叉本身由壓電材料和電極所組成,故對其輸入適當週期和振幅的 電壓訊號,便可使之產生共振。本研究所使用的石英音叉理論值共振頻率為 32.768kHz( ,且其實際大小如圖 2.1.2 所示。 圖 2.1.2 石英音叉實體圖 從圖 2.1.2 也可明顯看出,半透明的石英音叉外表鍍有一層金屬電極,其作 用是對石英造成逆壓電效應,使石英形變並間接使音叉本身產生振盪,其電極配 置如圖 2.1.3。故當電極 A 與電極 B 兩者電壓訊號振幅大小和相位大小不同時, 石英音叉會開始產生振盪。
15 電極A 電極B 電極 A B A A A B B B 側視圖 正視圖 圖 2.1.3 石英音叉電極分步圖 且石英音叉用於原子力顯微鏡所能探測最小力 F 可用方程式 2-1 表示[11]: fQ kT F C (2-1) C :常數 k :彈簧常數 T :溫度 f :共振頻率 Q :quality factor 故可以從方程式看出,主要控制石英音叉的最小探測力可由溫度、共振頻率
16 與 quality factor 幾項參數得知。可得知若需得到對於力感測有高解析度之石英音 叉,必須使之處於極度低溫下,且共振頻率和 quality factor 需越高越好,但本研 究不需達到如原子力顯微鏡之解析度,便不需外加降溫裝置來加高此研究成本與 所需技術。因此,所需控制之常數為共振之頻率和 quality factor,而此兩常數十 分容易於架設石英音叉時而降低數值,故需小心安裝音叉周遭儀器以使其可自由 震盪。當石英音叉振盪期間,若受外力影響,其音叉振幅和相位會因外力改變其 振盪行為而產生改變,且因為正壓電效應影響,其電極的輸出訊號會產生相對應 的改變,如圖 2.1.4 所式,於石英音叉上施予一力 F,輸出訊號之相位差和震幅 大小便有改變,其改變量會因施力位置與力之大小而有所不同。
F
輸出訊號 音叉受力狀況 時間 時間 振幅 振幅 圖 2.1.4 石英音叉受力之輸出訊號圖17
2.2 樑的撓度
從材料力學可知,當負載作用於樑上時,會使樑從原來的筆直形狀變化成撓 曲的曲線,其撓曲曲線之曲率與彎曲力矩之關係,可求出施予樑之正向應力之分 部。在本研究中,運用到一集中力施予樑之末端,其力可由方程式 2-2 和圖 2.2.1 說明:L
P
B 圖 2.2.1 樑的撓度原理圖 :撓度 P :集中力 L :樑之長度 E :楊氏系數 I :截面慣性矩 (2-2) 從方程式可得知撓度和集中力成正比且具線性關係,而且集中力與樑長度成三次 方反比關係。若集中力並非集中於末端,而是施予樑上任何一點,則於集中力作18 用力之點之撓度,與末端之撓度為:
L
P
Ba
V
圖 2.2.2 樑的撓度原理圖 :撓度 P :集中力 L :樑之長度 E :楊氏系數 V :集中力點之撓度 a :集中力於固定點之長度 I :截面慣性矩 (2-3) (2-4) 從方程式 2-3 可看出,集中力施展位置若定在於樑之兩端點之間,其端點之撓度 會因集中力和-固定端點之距離成反比,且於集中力之點的撓度之方程式 2-4 則 和方程式 2-2 相同,和集中力與 a 值三次方成正比。19
三、 測量石英音叉感測位移特性之設計
本研究主要是運用石英音叉於感測微米位移上。在文獻回顧說明過,石英音 叉目前於量測奈米位移方面,大部分是用在原子力顯微鏡上,且量測方法是讓石 英音叉受到原子間作用力,然後利用近代物理學的公式換算成距離。故在設計實 驗時便參考了學者此想法,但感測的力並非原子間作用力那麼小,而是利用剛性 極小的懸臂樑。其設計是利用一懸臂樑固定於待測物上,並使梁之另一端接近石 英音叉。當待測物產生位移而帶動懸臂樑時,懸臂樑開始移動並觸碰石英音叉施 予其一作用力場,若此時石英音叉因輸入固定頻率的電壓訊號而產生共振,音叉 之輸出訊號便會因交互作用力場而產生相對應變化,如圖 3.0.1 所示。藉由收集 待測物的位移、石英音叉的輸出電壓訊號之振幅和相位變化等數據,分析其特性 後用於位移感測之應用上。 石英音叉 懸臂樑 待測物 交互作 用力場 石英音叉 懸臂樑 待測物 位移 圖 3.0.1 石英音叉位移感測器原理圖20
3.1 石英音叉規格與安置
本實驗使用的石英音叉為共振頻率為 32768Hz( ),如圖 3.1.1 所示: 3.5mm 0.6mm 0.2mm 圖 3.1.1 石英音叉規格圖 選擇此種石英音叉的原因為它的共振頻率和大小較符合需求。因為其他較小 且更精密的石英音叉製作成本高(本實驗使用的此種石英音叉成本極低),並且可 配合使用的懸臂樑極少;因為使用更小的石英音叉進行實驗需找到更為細小且剛 性更低的懸臂樑,以避免懸臂樑施力於石英音叉造成石英音叉的受損或者難以感 測。而使用較高共振頻率的石英音叉則需要更好的周邊量測設備。故在經過初步 估計後,選擇圖 3.1.1 此種音叉。 因為石英音叉對於力的敏感度極高,所以欲使音叉固定於實驗帄台上時,需 使帄台不致於影響音叉之振盪為優先考量點。最初固定音叉的方法,是採用現在 原子力顯微鏡固定的方法,利用三秒膠將音叉電極端固定於鐵磁性帄台上,且要 小心黏膠是否有沾黏到音叉上,因為音叉上的少許黏膠會使其無法正常運作,如 圖 3.1.2 所示,固定方法為先用三秒膠小心讓石英音叉之電極黏著於鐵磁性小帄21 台,黏著後須確認音叉電極不會與帄台導通而產生不必要的短路與雜訊,當確定 音叉兩隻電極已被黏住,再把石英音叉基座端和帄台間加上些許三秒膠固定,最 後利用磁鐵吸住此帄台以便於固定石英音叉在所需位置。 石英音叉 黏膠 鐵磁性平台 磁鐵 圖 3.1.2 石英音叉的固定圖 經實驗過後,發現這種固定方法當石英音叉受懸臂樑施予的力影響時,石英 音叉雜訊會過大,推測可能是由於鐵磁性帄台和磁鐵間作用力不足而導致鐵磁性 帄台會受石英音叉振盪而震動。嘗試不斷加強磁鐵的磁力後,雖可使雜訊稍微變 小但雜訊仍然在無法接受的範圍內,且在做固定石英音叉的過程是,太過強大的 磁力非常容易使帄台貼住磁鐵瞬間的振盪導致石英音叉受損。由於上述理由,我 認為利用原子力顯微鏡的固定方法並不適用於本實驗,故改成把石英音叉先黏著 於基座上,再把此基座直接用螺絲固定於想擺設的位置。而此石英音叉的黏著方 法改變成先用夾具夾住石英音叉電極,將石英音叉靠近帄台後,調整音叉與帄台
22 的相對位置,當位置固定好後,先用三秒膠在帄台上些微塗抹一層,確保達到絕 緣效果後,在塗抹大量三秒膠來固定電極和石英音叉的基座端,約等六小時左右 時間確定膠已經完全凝固後,再拆除夾具,如圖 3.1.3 和圖 3.1.4 所示。 基座 基座 基座 基座 上膠絕緣 安置固定音叉 上膠固定 靜置等固定 三秒膠 圖 3.1.3 石英音叉的固定流程圖
23 圖 3.1.4 石英音叉的固定完成圖 安置石英音叉動作完成後,須再測試是否有辦法正常運作,測試重點包含: 1.是否有辦法共振於石英音叉的共振頻率(約 32.768kHz)。 2.共振振幅是否過小而感測不到或不便於感測(黏接過程時有讓膠不小心碰音叉 部分會造成此情況)。 3.雜訊是否過大。 經過此三點評估後,再拿來使用在實驗上。 3.2 懸臂樑 本研究所需的懸臂樑,其剛性需處於特定範圍之內。剛性過高,施予石英音 叉之力場過於龐大,會使之無法產生振盪,換句話說當待測物體移動後,懸臂樑 一接觸到音叉,其施予的力即超出音叉所可量測之範圍;剛性過低,施予石英音 叉之力場過於微小,使之無法感應該作用力場,會出現待測物移動並且懸臂樑開
24
始施予音叉力場時,音叉的輸出訊號改變過小,甚至毫無改變,故懸臂樑的選擇 之重要性於此實驗十分重大。經嘗試後,本實驗最初選擇單模光纖(single mode optical fiber)之蕊心來當作懸臂樑,其剛性大小足以運用於本實驗,經過實驗後, 發現尚未去殼之光纖雖剛性變大,但仍可使石英音叉感測位移出現良好的特性, 故最後採用單模光纖(single-mode optical fiber),其細節會於第四章節加以敘述。 圖 3.2.1 為光纖蕊心與光纖,外殼直徑為 0.245mm 而蕊心為 0.125mm,取出蕊心 方法為壓碎並除去外殼,由於光纖十分脆弱,故壓碎這步驟需小心,以免破壞整 個光纖。雙光纖蕊心第四章節會敘述其製作方式。 光纖蕊心 雙光纖蕊心 單模光纖
cm
cm
圖 3.2.1 光纖實體圖 3.3 電路設計 本實驗電路所扮演之角色為振盪石英音叉,並且使石英音叉的電流訊號轉換 成電壓訊號,並且讓輸出訊號可達到最佳化效果。如圖 3.3.1 所示,最初由訊號 產生器輸入電壓訊號給石英音叉使其開始振盪,接著音叉輸出訊號後由放大器轉25 換成電壓,使其可以被 lock-in amplifier 讀取並過濾雜訊。 訊號產生器 鎖相放大器 石英音叉 圖 3.3.1 電路圖 圖 3.3.2 電路實體圖 3.4 雷射位移感測器 本實驗用到的雷射位移感測器為 KEYENCE 公司的 LK-H020,用途為用來 感測待測物的位移,量測全行程可達 6mm,解析度可達到 0.02m,其實體圖如 圖 3.4.1 所示:
26 圖 3.4.1 雷射位移感測器實體圖 其量測原理為三角形量測法,如圖 3.4.2 所示,雷射光照射目標後反射到感 光元件部分,其感光元件分成物鏡與感測元件 RS-COMS,物鏡將雷射光加以聚 焦在 RS-COMS 上並形成一極小光點,當目標物移動時,光點便會跟著在 RS-COMS 上相對移動,故利用此性質可精準測量待測物體之相對位置。 RS-COMS 物鏡 雷射二極體 圖 3.4.2 雷射位移感測器運作原理[18] 3.5 位移帄台 使用的位移帄台包含:
27 1. PI 公司的三軸壓電位移帄台 P-611.3S,各軸 closed-loop 全行程為 100m,解 析度為 1m,如圖 3.5.1 所示。 圖 3.5.1 三軸壓電帄台圖[20] 2. 精密雙軸位移帄台為 MISUMI 公司的 XYEG25,全行程為 5mm,最小讀取量 為 0.1mm。 3. Piezomechanik 公司的壓電材料,全行程為 20m。 3.6 鎖相放大器 鎖相放大器採用 SRS 公司的 SR844 Lock-In Amplifier,主要功能為先接收一 參考訊號,藉此參考訊號並透過快速傅立葉轉換等來分析輸入訊號的振幅和相位 等變化。其可運作範圍為 25kHz 到 200MHz,且低通濾波器的 time constant 範圍 為 100μs 到 30ks,圖 3.6.1 為其運算原理:
28 圖 3.6.1 鎖相放大器運作圖[19] 3.7 實驗設計 實驗時使用雷射位移感測器(LG-H020 控制器為 LG-HD500,KEYENCE Corporation)來測量壓電位移帄台之位移量,並且用手動位移帄台粗調懸臂樑與 石英音叉的接觸位置,且將整體實驗儀器放置在光學帄台過濾外界震動。石英音 叉則是由訊號產生器(SFG-2010, Good Will Instrument Co., Ltd.)產生正弦波訊號
29 經電路縮小後輸入石英音叉,再經由電路使石英音叉的輸出訊號從電流轉換成電 壓並且處理後,送入鎖相放大器擷取訊號,再藉由電腦和資料擷取卡並配合 LabView 程式來進行資料的收集。設備架構關係圖如 4.0.1 所示。 以電腦操作 LabVIEW程式 電源供應器 訊號產生器 訊號處理電路 DAQ卡 壓電位移平台 鎖相放大器 石英音叉 控制 雷射位移感測器 感測位移 壓電位移平台 之位移數據 相位和振幅 變化量 弦波訊號 供電 弦波訊號 光纖 位移變化 施力 供電 數據 圖 3.7.1 設備架構關係圖
30
四、 實驗與探討
本實驗主要分三大部分,第一部分實驗為找出適當的懸壁樑給予石英音叉一 個作用力後,石英音叉可以感測出其大小並且透過雷射位移感測器解析待測物位 移與石英音叉振幅和相位的關係,以便確定此研究的可行性。第二部分為嘗試加 長石英音叉可量測距離,並找出其雜訊來源。第三部分實驗為測量出在不同量測 距離之下,石英音叉的特性變化,並且測量出已改善的雜訊大小、頻寬和 time constant 之間的關係。 4.1 第一部分實驗 本部分實驗主要目的為研究石英音叉之位移特性研究的可行性評估,故最優 先須找出的特性為是否石英音叉輸出振幅與位移有線性關係。實驗主要先把石英 音叉固定,運用單軸位移帄台,進行粗調將懸臂樑慢慢逼近音叉之其中逼近其中 一隻腳的端點,再調整壓電材料(全形程 20μ ,Piezomechanik, Ltd)如圖 4.1.1 和 圖 4.1.2 所示,微調懸臂樑位置並使之開始壓迫已處於共振頻率(約 32.768kHz) 運作下的石英音叉。經過不斷調整懸臂樑的構成材料(嘗試使用過鐵絲、鎢絲、 人造纖維和動植物纖維等),最後選擇光纖蕊心,並在不同的壓迫距離點以每秒 取一千個數值的速度取四秒後做帄均值。其位移與振幅線性關係圖 4.1.3 所示:31 雷射位移感測器 壓電材料 石英音叉 光纖蕊心 單軸位移平台 光學平台 訊號產生器 I-V Convertor 鎖相 放大器 DAQ & PC amplitude phase displacement reference 高壓放大器 圖 4.1.1 第一部分實驗示意圖 壓電材料 光纖蕊心 石英音叉 圖 4.1.2 第一部分實驗儀器實體圖
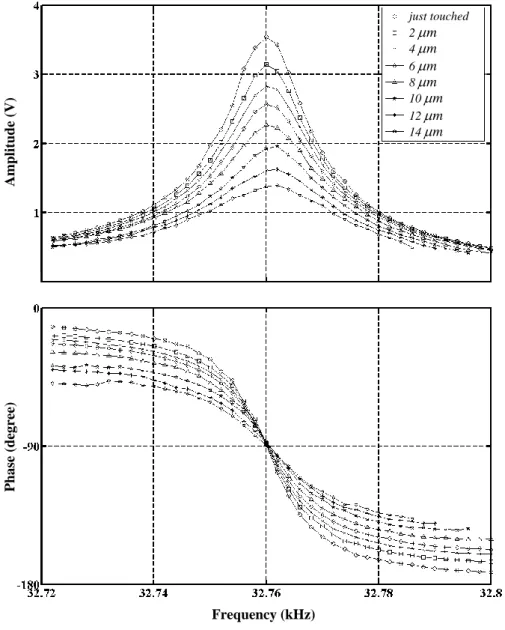
32 圖 4.1.3 石英音叉之位移與輸出訊號關係圖 從圖 4.1.3 可看出,壓電材料的行程範圍內,振幅與位移呈現良好之線性關 係,其線性範圍約 17.6μ 。而圖右上不規律之數據為光纖尚未觸碰到石英音叉, 故振幅訊號與位移無任何相關性。 由於已測出於共振頻率之下是石英音叉是可以精準感測到位移的變化,故進 一步做頻譜實驗,光纖從觸碰到音叉開始,慢慢以 2μ 為間距逼近,每組距離 作掃頻得知振幅和相位之變化,得到結果如圖 4.1.4 所示:
33 just touched 2 m 4 m 6 m 8 m 10 m 12 m 14 m Frequency (kHz) Amp litud e (V) Phase (degre e) 圖 4.1.4 頻譜圖 由頻譜圖可看出,當光纖於各頻率時施予力給音叉時,音叉之振幅和位置變 如同如圖 4.1.4 特性一般隨著位移增加而振幅降低。而相位差方面則是可以看出 隨著位移的增加而相位差變化量變低。故得到初步結論:石英音叉可以利用待測 物上的懸臂樑施力來測量微米等級之位移。
34 4.2 第二部分實驗 本部分實驗為嘗試加長量測範圍與找出雜訊的原因,重新製作後的實驗儀器, 如圖 4.2.1 和圖 4.2.2 所示,使光纖長度可以調整。當光纖越長,雙軸位移帄台移 動相同距離之下,壓迫在石英音叉的力就相對越小,故利用此特性來使量測範圍 加長。 雷射位移感測器 光纖與壓電材料 固定支柱 雙軸位移平台 圖 4.2.1 第二部分實驗儀器意示圖 圖 4.2.2 第二部分實驗儀器實體圖
35 量測結果如圖 4.2.3 所示,可量測範圍可被增加到 100m,但是其雜訊過大, 且特性重複性差,例如同樣壓迫的行程,重複做十次,會出現十種不同的特性(斜 率、雜訊和線性度等),經過改變各種實驗儀器參數後,發現主要原因為:1.石英 音叉的固定方式 2.光纖蕊心不適合當作懸臂樑。 圖 4.2.3 石英音叉量測位移特性圖 第一點於第三章石英音叉規格內所述,初版固定方式為將石英音叉固定於鐵 磁性帄台並用磁鐵吸附,而當石英音叉受外力影響時,鐵磁性帄台和磁鐵間作用 力也會受到改變,故每次量測出來的特性重複性極低是由於肉眼看不到的振盪已 經使鐵磁性帄台和磁鐵間的相對位置還有兩者之間的磁力已經受到改變,如圖 -2501 -200 -150 -100 -50 0 50 2 3 4 5 6 7 8 Displacement(um) A m p lit u d e (V )
36 4.2.4 所示。 石英音叉 黏膠 鐵磁性平台 磁鐵 外加力場 振盪 振盪 移動 圖 4.2.4 石英音叉受力影響推測圖 第二點是嘗試改變懸臂樑的材料時,使用了雙光纖蕊心黏製而成的懸臂樑來 做實驗,其製作方法為將兩光纖蕊心並排,將三秒膠均勻塗於兩者之間,並靜置 等待其固定,如圖 4.2.5 所示: 光纖蕊心 三秒膠 側視圖 正視圖 圖 4.2.5 雙光纖蕊心結構圖
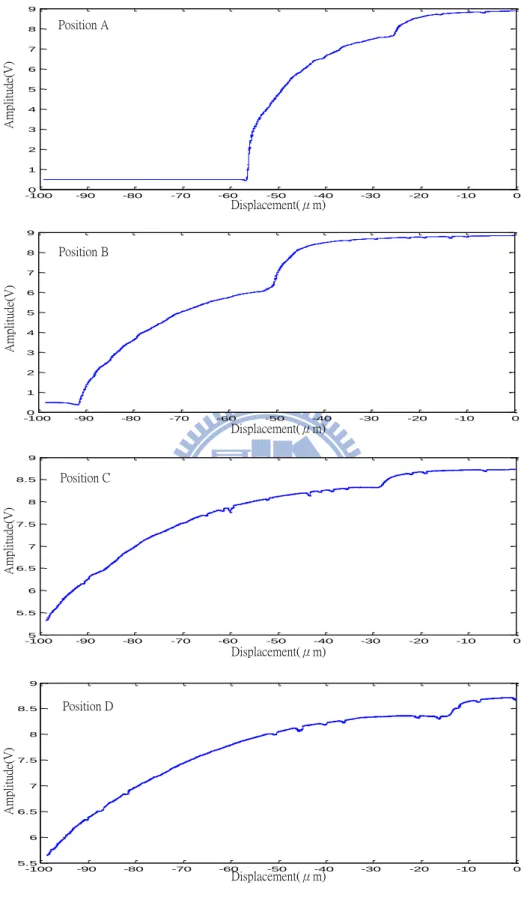
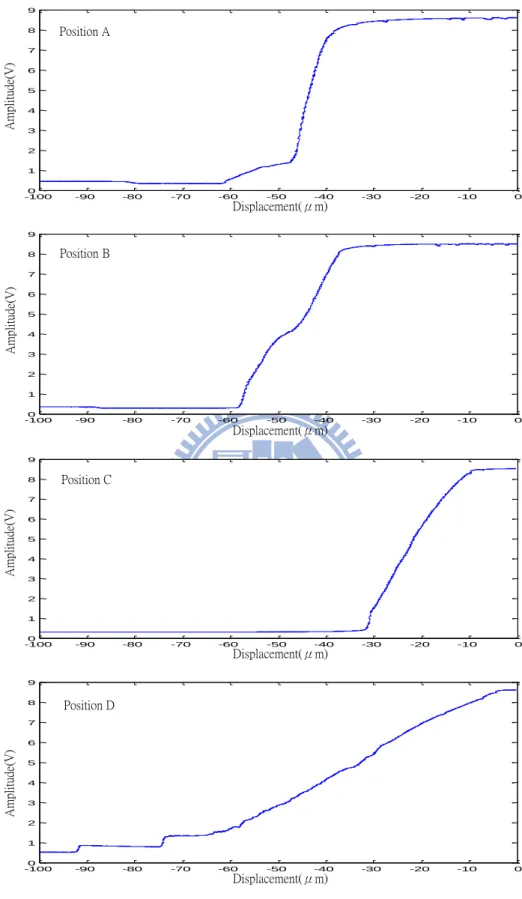
37 其實驗結果與原使用單光纖蕊心比較: 種類 單光纖蕊心 雙光纖蕊心 特性 雜訊大 重複性尚可 雜訊小 重複性極差 原因 剛性小 品質固定 剛性較大 手工製作而成 由於上述比較後,嘗試改用未去殼的光纖,因為其光纖剛性較光纖蕊心大,且品 質固定。且經過實驗後,發現兼具雜訊小和重複性極佳這兩的優點,故懸臂樑材 料改用光纖。 4.3 第三部分實驗 改進前兩部分實驗所發現到的缺點後,並加入三軸壓電位移帄台做自動化測 量,如圖 4.3.1、圖 4.3.2 和圖 4.3.3 所示。量測方法為使用雷射位移感器感測三 軸壓電帄台的位移並同步紀錄鎖相放大器的所量測到的振幅大小,並設定當壓電 帄台移動超過欲量測的位移時,自動停止儀器並將數據儲存。數據量測設定為每 0.1 秒讓光纖壓迫石英音叉 0.25m 並同時取 50 個石英音叉與雷射位移感測器的 量測值,量測總長是 100m,並改變光纖長度和石英音叉與光纖的接觸位置來觀 察不同特性,如圖 4.3.4 所示,接觸點 Position A、B、C、D 四點相距約為 1mm, 光纖長度分別為 18mm、23mm、28mm 和 33mm。
38 雷射感測 控制器 高壓放大器 DAQ擷取卡 電腦 三軸壓電位移平台 雷射位移感測器 石英音叉 光纖 鎖相放大器 訊號產生器 電壓 訊號處理 電路 感測訊號 位移資料 位移控制訊號 振幅 弦波 圖 4.3.1 第三部分實驗架構意示圖 光纖 石英音叉 圖 4.3.2 第三部分實驗儀器實體圖
39
光纖
石英音叉
圖 4.3.3 第三部分實驗光纖與石英音叉接觸圖 光纖長度 Position A Position B Position C Position D 1mm 1mm 1mm 圖 4.3.4 石英音叉與光纖的改變參數意示圖 改變各參數量測石英音叉的位移特形如圖 4.3.5、圖 4.3.6、圖 4.3.7 和圖 4.3.8 所示,各小圖橫軸為位移(m),縱軸為振幅大小(V):40 -1000 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 1 2 3 4 5 6 7 8 9 -1000 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 1 2 3 4 5 6 7 8 9 -1005 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 5.5 6 6.5 7 7.5 8 8.5 9 -100 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 5.5 6 6.5 7 7.5 8 8.5 9 Displacement(μm) Displacement(μm) Displacement(μm) Displacement(μm) Ampl itu de (V ) Ampl itu de (V ) Ampl itu de (V) Ampl itu de(V ) Position A Position D Position B Position C 圖 4.3.5 光纖長度 33mm 的各接觸位置特性圖
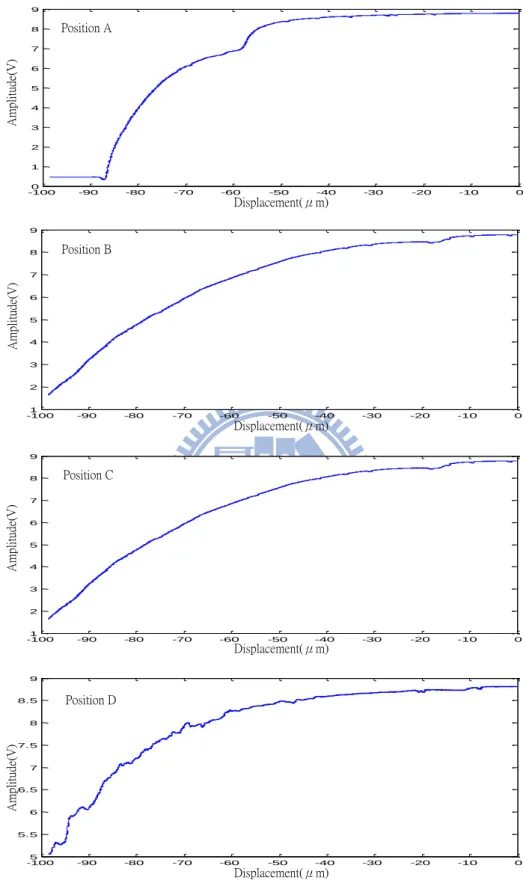
41 -1005 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 5.5 6 6.5 7 7.5 8 8.5 9 -1001 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 2 3 4 5 6 7 8 9 -1001 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 2 3 4 5 6 7 8 9 -1000 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 1 2 3 4 5 6 7 8 9 Displacement(μm) Displacement(μm) Displacement(μm) Displacement(μm) Ampl itu de (V ) Ampl itu de (V ) Ampl itu de (V) Ampl itu de(V) Position A Position D Position B Position C 圖 4.3.6 光纖長度 28mm 的各接觸位置特性圖
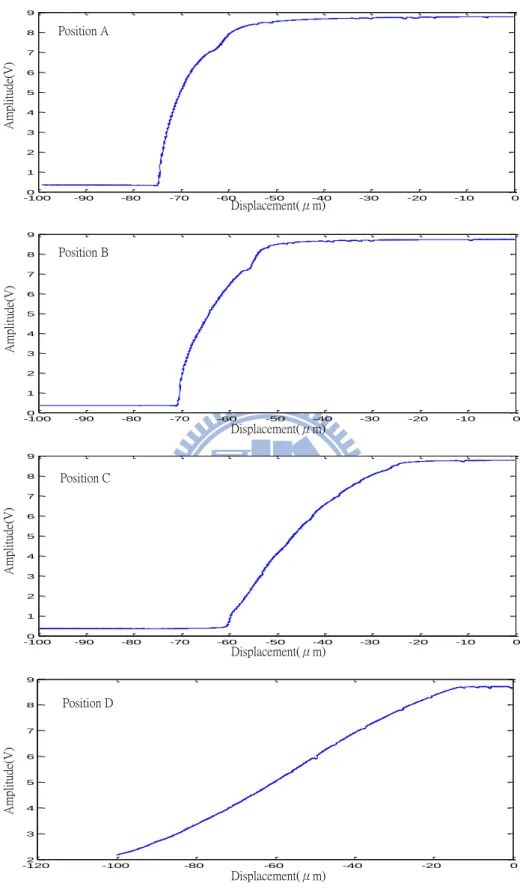
42 -1202 -100 -80 -60 -40 -20 0 3 4 5 6 7 8 9 -1000 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 1 2 3 4 5 6 7 8 9 -1000 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 1 2 3 4 5 6 7 8 9 -1000 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 1 2 3 4 5 6 7 8 9 Displacement(μm) Displacement(μm) Displacement(μm) Displacement(μm) Ampl itu de (V ) Ampl itu de (V ) Ampl itu de (V) Ampl itu de(V) Position A Position D Position B Position C 圖 4.3.7 光纖長度 23mm 的各接觸位置特性圖
43 -1000 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 1 2 3 4 5 6 7 8 9 -1000 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 1 2 3 4 5 6 7 8 9 -1000 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 1 2 3 4 5 6 7 8 9 -1000 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 1 2 3 4 5 6 7 8 9 Displacement(μm) Displacement(μm) Displacement(μm) Displacement(μm) Ampl itu de (V) Ampl itu de (V ) Ampl itu de (V ) Ampl itu de(V) Position A Position D Position B Position C 圖 4.3.8 光纖長度 18mm 的各接觸位置特性圖
44 從這些特性中,先以同光纖長度做比較,圖 4.3.9 為光纖 23mm 的改變接觸位置 的特性比較圖,只取這些數據比較其原因為特性顯示較明顯: Position A Position B Position C Position D 圖 4.3.9 光纖長 23mm 的各接觸點比較圖 可以看出當光纖接觸位置越來越靠近基座端,會使特性曲線的斜率慢慢減少, 也就是敏感度降低,但是也可以發現可量測的位移也因此而變長。其原因推測是: 把音叉看作一懸臂樑,其光纖壓迫點越靠近基座端,其力臂也相對應變短,故光 纖施予的力矩也變小,待測物推動光纖相同距離之下所影響音叉的振幅變化也變 小。 再從固定接觸位置為 Position C,改變光纖長度,可從圖 4.3.10 看出其差異:
45 23mm 33mm 28mm 18mm 圖 4.3.10 Position C 改變光纖長度比較圖 從圖 4.3.10 可看出,在第二章所述的懸臂樑施力大小和其懸臂樑長度成三次 方反比關係,故當長度越小,其施予音叉的力也越大,故振幅對應頻率的斜率也 相對變大。並於最後取出光纖長為 23mm 且接觸位置為 position D 的特性來做頻 譜分析及雜訊與頻寬分析,原因為此特性的線性度與可量測範圍較為良好。 雜訊與頻寬分析部分,首先是測量不同位移的雜訊大小,數據擷取為每秒測 量兩百個數值,共量測 150 秒,圖 4.3.11 和圖 4.3.12 為各光纖長度的定點量測, 在鎖相放大器的低頻濾波器的 time constant 為 100ms 情況下,從上而下依序是位 移為 0m 到 100m,藉此觀測其雜訊大小(位移標準差):
46 0 50 100 150 8.74 8.76 8.78 8.8 8.82 8.84 8.86 8.88 8.9 8.92 Displacement = 0um Displacement = 20um Displacement = 40um 0 50 100 150 8.14 8.16 8.18 8.2 8.22 8.24 8.26 8.28 8.3 8.32 0 50 100 150 6.8 6.85 6.9 6.95 7 7.05 A m p li tu d e( V ) A m p li tu d e( V ) A m p li tu d e( V ) Time(s) Time(s) Time(s) 振幅標準差:0.014V 位移標準差:0.154um 振幅標準差:0.024V 位移標準差:0.275um 振幅標準差:0.021V 位移標準差:0.241um 換算 換算 換算 圖 4.3.11 位移 0m、20m 和 40m 的電壓隨時間變化圖
47 0 50 100 150 1.35 1.4 1.45 1.5 1.55 1.6 0 50 100 150 3.25 3.3 3.35 3.4 3.45 3.5 0 50 100 150 4.95 5 5.05 5.1 5.15 5.2 Displacement = 60um Displacement = 80um Displacement = 100um A m p li tu d e( V ) A m p li tu d e( V ) A m p li tu d e( V ) Time(s) Time(s) Time(s) 振幅標準差:0.031V 位移標準差:0.349um 振幅標準差:0.028V 位移標準差:0.315um 振幅標準差:0.033V 位移標準差:0.371um 換算 換算 換算 圖 4.3.12 位移 60m、80m 和 100m 的電壓隨時間變化圖 接著嘗試改變鎖相放大器的低通濾波器之 time constant 參數,以找出其雜訊
48
(位移標準差)和頻寬的最大值與最小值。
量測雜訊大小方法如圖 4.3.11 和圖 4.3.12 的量測方法,不同點為改變 time constant 並將各 time constant 之下的雜訊做帄均。
而量測頻寬的方法為使用電腦和 DAQ 產生弦波電壓並送入到壓電位移帄台, 使位移帄台隨時間產生弦波形式的位移;同時,使用石英音叉量測壓電帄台位移, 也就是將位移帄台上黏接一懸臂樑並觸碰石英音叉,如圖 4.3.3 所示,便可以在 石英音叉的輸出電極得到弦波的電流訊號。當送入壓電位移帄台的弦波頻率增加 時,石英音叉的量測速度會逐漸跟不上弦波的頻率,導致石英音叉的輸出訊號振 幅下降,加以比對輸出訊號振幅和弦波頻率的關係後,可得到振幅與頻率的關係 圖,也就是波德圖的振幅部分,並藉由波德圖得知在不同的 time constant 之下的 頻寬大小,簡單示意圖如圖 4.3.13 所示。圖 4.3.14 和圖 4.3.15 為不同的 time constant 下的波德圖之振幅部分。並且加以分析並統一整理後,於圖 4.3.16 和圖 4.3.17 顯示不同 time constant 下頻寬和雜訊大小。 電 腦 和 D A Q (改 壓 變 電 頻 位 率 移 ) 平 台 石 英 音 叉 弦 波 電 壓 量 測 位 移 (藉 由 懸 臂 梁 ) 電 流 訊 號 (振 ) 幅 大 小 隨 頻 率 變 化 圖 4.3.13 頻寬量測示意圖
49 10-2 10-1 100 101 0 2 4 6 8 10 12 10-2 10-1 100 101 0 2 4 6 8 10 12 10-2 10-1 100 101 0 2 4 6 8 10 12 Frequency(Hz) A m pl itu de (d B ) Frequency(Hz) A m pl itu de (d B ) Time constant=300ms Time constant=100ms Time constant=30ms Frequency(Hz) A m pl itu de (d B ) 圖 4.3.14 各 time constant 之波德圖振幅部分(1)
50 10-2 10-1 100 101 0 2 4 6 8 10 12 10-2 10-1 100 101 0 2 4 6 8 10 12 10-2 10-1 100 101 0 2 4 6 8 10 12 Frequency(Hz) A m pl it ud e( dB ) Frequency(Hz) A m pl it ud e( dB ) Time constant=10ms Time constant=3ms Time constant=1ms Frequency(Hz) A m pl it ud e( dB ) 圖 4.3.15 各 time constant 之波德圖振幅部分(2)
51 圖 4.3.16 time constant 和頻寬比較圖 圖 4.3.17 time constant 和雜訊比較圖 從圖 4.3.16 和圖 4.3.17 可看出雜訊最小可以調整到 0.3%左右,若要兼顧頻 寬大小,最佳的情況應該是選擇 time constant 為 30ms,則雜訊略為增加到 0.54% 而頻寬可以增加到 2.2Hz。同時可看出,當想要操作在較小雜訊時,頻寬同時也 會變小,反之,想要操作在頻寬較大的情況,雜訊相對也會較大。 0 50 100 150 200 250 300 0 0.5 1 1.5 2 2.5 3 Time constant(ms) B a n d w id th (H z ) 0 50 100 150 200 250 300 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 Time constant(ms) N o is e (% )
52 圖 4.3.18 為其頻譜,測量方法為從頻率 32748Hz 每隔 0.2Hz 取振幅作紀錄, 直到量測到 32775.4Hz 為止,從位移 0m 測量到 70m: 0um 10um 20um 30um 40um 50um 60um 70um A m pl it ud e( V ) 32745 32750 32755 32760 32765 32770 32775 32780 Frequency(Hz) 圖 4.3.18 頻譜圖 0 10 20 30 40 50 60 70 3.2762 3.2763 3.2763 3.2763 3.2764 3.2765 3.2765 3.2765x 10 4 32762 32763 32764 32765 32762.5 32763.5 32764.5 32765.5 Displacement(um) R es on an t fr eq ue nc y( H z) 圖 4.3.19 位移和共振頻率關係圖
53 Displacement(um) A m pl it ud e( H z) 圖 4.3.20 位移和共振振幅關係圖 從圖 4.3.19 和 4.3.20 中觀測出來,在致動器位移不斷加長使光纖壓迫石英音 叉之下,頻譜有某種特定規率的變化:1.共振振幅逐漸變小。2.共振頻率漸漸上 升(從 32762.2Hz 升到 32765.2Hz)。3.其品質參數(Q factor)從約 3640 左右漸漸下 降到約 2184。
54
五、 結論與展望
本實驗已研究出石英音叉確實可以運用在量測微米等級的研究上,從特性上 可看出量測範圍從最小 10m 到最長 100m 皆可使用,且雜訊最小可達到 0.3%。 使用者可依照自己的需求,同時參考圖 4.3.5、圖 4.3.6、圖 4.3.7 和圖 4.3.8,自 由調整其量測範圍大小和量測特性,以達到最佳的使用效果。 而未來展望部分,實驗方面還有可以進一步研究的幾點,包含: 1. 嘗試改變懸臂樑材料,在實驗過程中發現,各種懸臂量材料使石英音叉量測 特性有很大的差異性,目前實驗所使用的為光纖,為圓柱形懸臂樑,尚未嘗 試過各種不同形狀的懸臂量會導致何種特性。 2. 改變石英音叉黏著方式,由於本實驗石英音叉皆為手工黏製,從做實驗的角 度而言,這種黏製方式十分粗糙,品質十分不穩定,故個人認為尚有很大的 改進空間。 3. 本實驗已經觀測出當石英音叉於不同點施於作用力場,其特性會完全不同。 而近年來當石英音叉單運用於原子力顯微鏡時,幾乎都只把探針黏於石英音 叉的音叉末端,未嘗試黏著於靠近基座端附近。故本研究成果可嘗試在石英 音叉的原子力顯微鏡上,應可製作出與以前不同的量測特性。55
六、 參考文獻
[1] J. Xu, B. You, and X. F. Zhao, DEVELOPMENT OF QUARTZ TUNING
FORK TEMPERATURE SENSORS. New York: Ieee, 2008.
[2] W. J. Kass and G. S. Snow, "DOUBLE-ENDED TUNING FORK QUARTZ ACCELEROMETER CHARACTERISTICS," Ieee Transactions on
Ultrasonics Ferroelectrics and Frequency Control, vol. 33, pp. 792-792, Nov
1986.
[3] K. Sato, A. Ono, and Y. Tomikawa, "Experimental study of gyro sensor using double-ended tuning fork quartz resonator," Japanese Journal of Applied
Physics Part 1-Regular Papers Short Notes & Review Papers, vol. 43, pp.
3000-3003, May 2004.
[4] M. Ono, M. Hirata, K. Kokubun, H. Murakami, F. Tamura, H. Hojo, H. Kawashima, and H. Kyogoku, "DESIGN AND PERFORMANCE OF A QUARTZ OSCILLATOR VACUUM GAUGE WITH A CONTROLLER,"
Journal of Vacuum Science & Technology a-Vacuum Surfaces and Films, vol.
3, pp. 1746-1749, 1985.
[5] A. A. Kosterev, F. K. Tittel, D. V. Serebryakov, A. L. Malinovsky, and I. V. Morozov, "Applications of quartz tuning forks in spectroscopic gas sensing,"
Review of Scientific Instruments, vol. 76, p. 9, Apr 2005.
[6] M. Heyde, M. Kulawik, H. P. Rust, and H. J. Freund, "Double quartz tuning fork sensor for low temperature atomic force and scanning tunneling
microscopy," Review of Scientific Instruments, vol. 75, pp. 2446-2450, Jul 2004.
[7] M. S. Damnjanovic, L. D. Zivanov, L. F. Nagy, S. M. Djuric, and B. N. Biberdzic, "A Novel Approach to Extending the Linearity Range of
Displacement Inductive Sensor," Ieee Transactions on Magnetics, vol. 44, pp. 4123-4126, Nov 2008.
[8] 伍秀菁、汪若文、林美吟,儀器總覽,精密儀器發展中心出版,October 1998. [9] ROY R. CRAIG, Jr., Mechanics of Materials, June 2002.
[10] Sedra/Smith, Microelectronic Circuits, fifth edition,2004
[11] H. Hida, et al., Fabrication and characterization of AFM probe with
crystal-quartz tuning fork structure, 2005.
[12] U. Willer, et al., Compact Gas Sensing System Based on Mid-Infrared LED
and Resonant Detection with Quartz Tuning Fork, 2009.
[13] Yu-Hsuan Lin, Chien-Ying Su, Han-Chang Pan, Ming-Hua Shiao, Mechanisms of
56
2005.
[14] P. Sandoz, et al., Digital image processing for measuring 2D vibration
amplitudes with subpixel resolution: application to the quartz tuning fork,
2007.
[15] www.memstec.com.tw [16] www.sony.com
[17] H. F. Pan, et al., "A new type of eddy current sensor for large displacement test," in International Conference on Sensor Technology. vol. 4414, Y. Zhou and S. Xu, Eds., ed, 2001, pp. 246-249.
[18] http://www.keyence.com.tw/products/measure/laser/lk/lk.php
[19] “SR844 DSP Lock-in Amplifier (Operating Manual and programming Reference)”,Stanford Research System,com.
![圖 1.2.4 雙石英音叉陀螺儀[3]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8249670.171647/13.892.191.699.112.427/圖124雙石英音叉陀螺儀3.webp)
![圖 1.2.6 石英音叉應用於原子力顯微鏡之構造圖[11]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8249670.171647/15.892.216.713.492.771/圖126石英音叉應用於原子力顯微鏡之構造圖11.webp)
![圖 1.2.7 石英音叉振幅與頻率關係圖[14]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8249670.171647/16.892.253.679.112.460/圖127石英音叉振幅與頻率關係圖14.webp)
![圖 1.2.11 電感式位移感測器探針頭和剖面圖[16]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8249670.171647/19.892.240.638.506.717/圖1211電感式位移感測器探針頭和剖面圖16.webp)