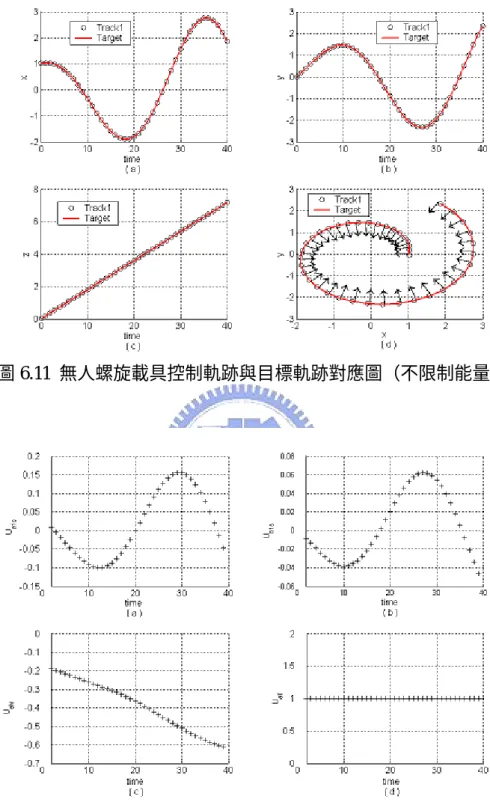
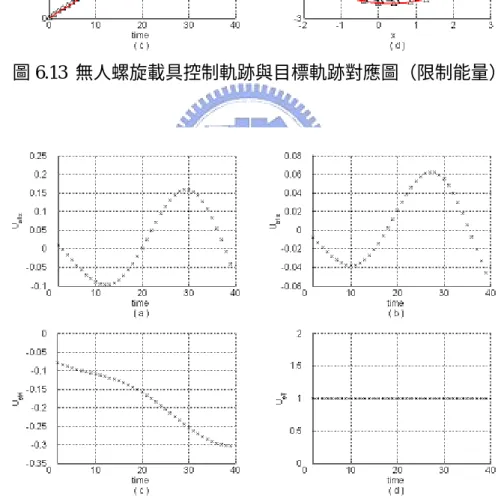
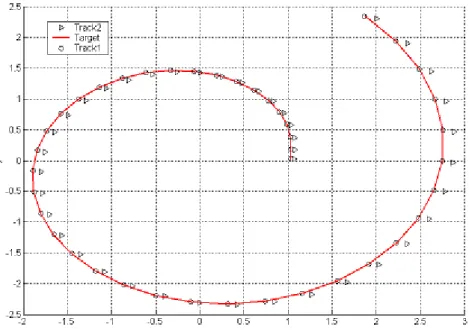
無人螺旋航空載具的軌跡控制
全文
數據
相關文件
Soille, “Watershed in Digital Spaces: An Efficient Algorithm Based on Immersion Simulations,” IEEE Transactions on Pattern Analysis and Machine Intelligence,
F., “A neural network structure for vector quantizers”, IEEE International Sympoisum, Vol. et al., “Error surfaces for multi-layer perceptrons”, IEEE Transactions on
Sheu, 2006, “Integrating Multivariate Engineering Process Control and Multivariate Statistical Control,” International Journal of Advanced Manufacturing Technology 29, 129-136.
Then, these proposed control systems(fuzzy control and fuzzy sliding-mode control) are implemented on an Altera Cyclone III EP3C16 FPGA device.. Finally, the experimental results
Chan, “Effect of Intermetallic Compounds on the Thermal Fatigue of Surface Mount Solder Joints,” IEEE Transactions on Components, Packaging, and Manufacturing Technology B, Vol.
Chan, “Effect of Intermetallic Compounds on the Thermal Fatigue of Surface Mount Solder Joints,” IEEE Transactions on Compounds, Packaging, and Manufacturing Technology B, Vol.
[17] John Barkley, Konstantin Beznosov, and Jinny Uppal, ―Supporting Relationship in Access Control Using Role Based Access Control,‖ Proceedings of ACM Role-Based
[3] Ke Xiaolong, “Study on Software and Hardware Control of High-precision Measurement Platform for Optical Aspheric Surface”, 2009 IEEE International Conference on
