國 立 交 通 大 學
機械工程學系
碩士論文
混合式電磁壓電致動器之設計與特性研究
The Design and Characteristic Research of a Hybrid
Electromagnetic and Piezoelectric Actuator
研究生:陳立岡
指導教授:洪紹剛 博士
混合式電磁壓電致動器之設計與特性研究
The Design and Characteristic Research of a Hybrid
Electromagnetic and Piezoelectric Actuator
研 究 生:陳立岡
Student:Li-Kang Chen
指導教授:洪紹剛
Advisor: Shao-Kang Hung
國 立 交 通 大 學
機 械 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Mechanical Engineering June 2010
Hsinchu, Taiwan, Republic of China
i
混合式電磁壓電致動器之設計與特性研究
研究生:陳立岡 指導教授:洪紹剛
國立交通大學機械工程學系碩士班
摘要
本論文提出一種電磁與壓電混合式致動器,同時結合了電磁式致動器長行程與壓電 式致動器高解析度的優點。此混合式致動器包含可動件、導引件、撓性可調預壓裝置、 電磁鐵、壓電元件、以及周邊控制電路。首先利用撓性可調預壓裝置並設定電磁鐵電流, 使得電磁致動力介於最大靜摩擦力與動摩擦力之間。再利用壓電元件所產生的微震動, 控制可動件與導引件之間的接觸情況在靜摩擦與動摩擦之間切換,從而達成長行程 (6mm)且高解析度(1.7µ m)的直線運動。ii
The Design and Characteristic Research of a Hybrid Electromagnetic
and Piezoelectric Actuator
student:Li-Kang Chen
Advisors:Shao-Kang Hung, Ph.D.
Department of Mechanical Engineering
National Chiao Tung University
ABSTRACT
This thesis presents a hybrid electromagnetic and piezoelectric actuator, which has the advantages with both long traveling range in electromagnetic actuator and high-resolution in piezoelectric actuator. The hybrid actuator consists of moving part, guidance, pre-load structure, electromagnet, piezoelectric material, and control circuits. First, adjusting the electromagnetic force between the maximum static friction force and kinetic friction force by setting the pre-load structure and the coil current. Then, when the state of the contact face is transferred. The actuator could move forward or back. Therefore, the actuator can perform one DOF motion with long traveling range(6mm) and high resolution(1.7µ m).
iii
誌謝
時光飛逝,短短兩年的研究生生涯稍縱即逝,在這段時間裡,我學習到許多 寶貴的經驗與生活態度。 能夠完成碩士學位首先感謝的是指導教授 洪紹剛博士的諄諄教誨,無論是 理論或實作上各方面的教導,使我能順利的完成學業與論文,在此致上最誠摯的 謝意。而老師在指導學生時豐富的專業知識,嚴謹的治學態度以及待人處事方面, 亦是身為學生的我學習與景仰的典範。 在論文寫作上,感謝本系鄭泗東教授和陳宗麟教授在百忙中撥冗閱讀並提出 寶貴的意見,使的本文的內容更趨完善與充實,在此本人致上無限感激。回顧這 兩年的日子,承蒙精密機電工程實驗室林建宇學長、王佑麒學長、陳彥菘學長以 及簡日韋學長在研究與學業上的適時指點,並有幸興同屆的鄭公、小棒棒同學互 相切磋討論,每在烏雲蔽空時,得以撥雲見日,獲益良多。此外學弟龍龍、尼歐、 碰北、建樺、承燁在口詴時,感謝你們熱心的幫忙準備,希望未來你們的研究能 夠順利完成。 最後以此篇論文,獻給我最愛的父母及弟弟。感謝父母二十餘年的栽培與照 顧,並且給予我精神上的支持,有你們作為後盾,使我能夠無後顧之憂地在學業 上投入更多心思,在此致上我最深的謝意。iv
目錄
摘要 ... i ABSTRACT ... ii 致謝 ... iii 目錄 ... iv 圖目錄 ... v 表目錄 ... vi 一、緒論 ... 1 1.1 前言... 1 1.2 文獻回顧 ... 3 1.3 論文結構 ... 11 二、預備知識 ... 12 2.1.1 電磁鐵的原理及運用 ... 12 2.1.2 電磁推力 ... 13 2.2 永久磁鐵 ... 15 2.3 摩擦力 ... 19 三、致動器設計 ... 21 3.1 致動器架構、原理 ... 21 3.2 系統整合 ... 24 3.2.1 資料擷取卡 ... 25 3.2.2 雷射位移感測器 ... 26 四、實驗 ... 28 4.1 實驗流程與設備 ... 28 4.2.1 調整方波頻率、Duty Cycle 值 ... 29 4.2.2 速度測詴 ... 33 4.2.3 定位控制 ... 34 4.2.4 拉力測詴 ... 39 4.2.5 系統共振頻率量測 ... 41 4.2.6 摩擦力量測 ... 42 五、結論與展望 ... 44 六、參考文獻 ... 46v
圖目錄
圖 1.1 Kato 等人研發的三自由度致動器[5],(a)致動器系統結構及磁迴
路路徑、(b) 致動器平移及旋轉的作動方式 ... 4
圖 1.2 Aoyama 和 Fuchiwaki 設計的致動器[6] ... 5
圖 1.3 Aoyama 和 Fuchiwaki 設計的致動器應用於 SEM 示意圖[6] ... 5
圖 1.4 Aoyama 和 Fuchiwaki 設計的四足致動器[9]... 6 圖 1.5 Shaoze 等人以撓性結構設計的致動器[10],(a)致動器示意圖、 (b)致動原理 ... 6 圖 1.6 Torii 等人設計類似史都華平台的致動器[12] ... 7 圖 1.7 Yao 等人設計的混合式致動器[13] ... 8 圖 1.8 Liu 等人設計的音圈致動器[14] ... 8 圖 1.9 Hisayuki 等人設計的致動器[15] ... 8 圖 2.1 電磁推力致動示意圖 ... 13 圖 2.2 永久磁石磁滯曲線圖 ... 16 圖 2.3 永久磁鐵磁能積發展史 ... 17 圖 3.1 可動件示意圖 ... 21 圖 3.2 致動器示意圖 ... 22 圖 3.2 致動器實體圖 ... 22 圖 3.4 非連續電壓訊號示意圖 ... 24 圖 3.5 實驗儀器量測架設圖 ... 25 圖 3.6 NI PCIe-6259 資料擷取卡 ... 26 圖 3.7 KEYENCE LK-H025 雷射位移感測器 ... 27 圖 3.8 雷射位移感測器量測原理 ... 27 圖 4.1 實驗量測流程圖 ... 29 圖 4.2 方波頻率 3.33Hz、Duty Cycle 值 99.835%實驗數據圖 ... 30 圖 4.3 方波頻率 3.33Hz、Duty Cycle 值 99.835%實驗數據局部放大圖 ... 30 圖 4.4 方波頻率 3.22Hz、Duty Cycle 值 96.774%實驗數據圖 ... 31 圖 4.5 方波頻率 3.22Hz、Duty Cycle 值 96.774%實驗數據局部放大圖 ... 32 圖 4.6 方波頻率 10Hz、Duty Cycle 值 67%實驗數據圖 ... 33 圖 4.7 方法一定位實驗數據圖 ... 35
圖 4.8 位移模式轉換,(a)連續位移→Mode 2,(b) Mode 2→Mode 1 .. 36
圖 4.9 方法一定位實驗,穩定後解析度約為 0.87µm(rms) ... 36
圖 4.10 方法二定位實驗數據圖 ... 37
圖 4.11 位移模式轉換,(a)連續位移→Mode 2,(b) Mode 2→Mode 1 37 圖 4.12 方法二定位實驗達穩定後數據圖 ... 38
vi 圖 4.13 雷射位移感測器背景雜訊對照圖 ... 39 圖 4.14 拉力量測原理 ... 40 圖 4.15 懸臂樑示意圖,a=30mm、b=0.6mm、c=5mm、L=47mm ... 40 圖 4.16 共振影響之頻譜 ... 41 圖 4.17 摩擦力量測上視圖 ... 42 圖 4.18 摩擦力實驗數據圖 ... 42
表目錄
表 1.1 電磁式與壓電式特性比較 ... 2 表 2.1 永久磁鐵優缺點比較 ... 18 表 4.1 實驗參數對照表 ... 28 表 4.2 完成定位三階段 ... 341
一、 緒論
1.1 前言
隨著科技的進步,產業界和科技界對系統設備之性能要求也不斷提高。小型 化、高精確度與高穩定性成為各領域之重要追求目標。不論是半導體產業、光電 通訊、精密機械設備、顯微機構、表面工程等,還是精密加工、定位與需無污染 環境之相關產業,皆需要定位精度高、快速驅動之機械相關設備來完成,如原子 力顯微鏡(atomic force microscope, AFM)[1]或掃描穿遂電子顯微鏡(scanning tunneling microscope, STM)[2],檢測探針必頇十分接近被測物表面至數奈米間距, 為了防止撞針意外發生,故需要高解析度的定位來避免。 現今高精度致動器多採用壓電材料,其主要優點就是輸出力量大、速度快且 位移解析度相當高,經由精確的電壓控制亦可獲得奈米級的位移解析度,但位移 與驅動電壓間存在著非線性的磁滯現象(hysteresis)[3-4],且最大行程也受限於其 幾何尺寸,使得可驅動的位移量僅有數十微米左右,為了擴大致動行程,通常會 加入放大機構來彌補壓電致動器行程過短的重大缺陷。 電磁式致動器利用電磁交互作用將電能轉化為機械能,其結構易於微小化, 適合用於微小、狹窄空間中,如手機或數位相機的鏡頭內就利用它來調整焦距。 此類致動器的特點為出力大、速度快,且可驅動的位移量可達到毫米等級,遠大 於壓電致動器,但使用時由於溫度飄移的關係,使的電流不易控制且位移解析度2 較壓電式差。另外,由於電磁力屬於非接觸式超距力,因此不需與物體接觸便能 以電磁力驅動目標,避免因為磨損而減少使用壽命,表 1.1 為電磁式與壓電式兩 種致動器的特性比較表。 本研究設計開發出一個混合式電磁壓電致動器,詴著將電磁式與壓電式這兩 種致動器的優點融合在一起,使得此混合式致動器具有出力大、速度快及毫米等 級的可驅動位移量等特點。以電磁線圈產生的電磁力來驅動可動件,搭配壓電材 料的使用,利用動、靜摩擦力間的轉換以及線圈電流方向的改變,達成長行程、 往復位移的目的,適用於精密定位等相關應用。 表 1.1 電磁式與壓電式特性比較 位移解析度 全行程 出力 其他 壓電式 較高 較短 (數十微米) 大 存在非線性磁滯現象 電磁式 較差 較長 (可達毫米等級) 大 電流不易控制
3
1.2
文獻回顧
在相關的研究當中,將壓電式以及電磁式兩種致動原理結合在一起的設計比 較少見,最後經過搜尋以及仔細的研讀後,整理了以下幾篇相關的研究回顧,其 原理皆是透過機構、磁迴路設計,巧妙的運用摩擦力來控制致動器的位移方向及 位移量,此類設計稱為尺蠖式(inchworm)致動也是目前精密定位中常用的方法, 作動方式就類似蟲的行進方式一步一步的移動,整體結構可分成夾持器及致動器 兩部份,透過一定的作動順序即可達到一個方向的精密步進,再經由位移的累積 可達到長行程的位移,其中以壓電材料伸長、縮短來負責致動器的位移,另外夾 持部份也可以透過不同的設計來達成各種的需求。 1998年,日本的Kato等人研發出一種XYθ三個自由度的致動器[5],以壓電材 料搭配線圈組成一Y型結構如圖1.1(a)所示,當線圈通電產生磁場吸附於底部磁性 物質組成的平台,此時伸長壓電材料即可使致動器產生微小的位移或旋轉,圖 1.1(b)為此致動器作動方式示意圖。此致動器最佳的步進位移解析度可達0.44μm, 角度解析度則為1.3μrad。4
(a) 致動器系統結構及磁迴路路徑
(b) 致動器平移及旋轉的作動方式 圖1.1 Kato 等人研發的三自由度致動器[5]
2001年Aoyama和Fuchiwaki設計出一新型致動器[6],用來協助掃描式電子顯 微鏡(scanning electron microscope, SEM)[7]的樣本定位如圖1.3所示,以及硬度測 詴設備的移動載台[8],致動器結構如圖1.2所示,線圈用來調整平台與致動器間
5 的摩擦力,壓電材料負責致動器的位移,其步進解析度可達7.0 µm,速度最高為 1.16mm/s,但由於線圈產生的磁場會干擾SEM的電子束產生偏移而降低影片解析 度。 圖1.2 Aoyama和Fuchiwaki設計的致動器[6] 圖1.3 Aoyama和Fuchiwaki設計的致動器應用於SEM示意圖[6] 2002年Aoyama和Fuchiwaki以四個壓電材料互相垂直排列和四個線圈設計 出如圖1.4所示的四足致動器[9],利用壓電材料週期性的伸長、縮短以及線圈調 整接觸面間摩擦力,即可使致動器產生三個自由度XYθ的運動,在XY方向具有 約4.7µm的解析度。
6 圖1.4 Aoyama和Fuchiwaki設計的四足致動器[9] 由於尺蠖式致動器通常需要運用多個致動元件才能達到步進的效果,除了製 作成本提高外,致動器質量增加也會影響性能的表現。2006年Shaoze等人利用撓 性結構設計出的致動器如圖1.5所示[10],僅使用了一個壓電材料即可達到三個自 由度的位移,此設計方法有效的降低了致動器的質量,其X方向的解析度約為 11.6µm。 (a) (b) 圖1.5 Shaoze等人以撓性結構設計的致動器[10],(a)致動器示意圖,(b)致動原理
7
2008年Torii等人使用六個壓電材料、三個線圈,設計出類似史都華平台 (Stewart platform) [11]具有六個自由度的致動器[12]如圖1.6所示,在XYθ方向最 高解析度可達0.2µm、0.2µm、10µrad,此設計缺點為結構複雜、使用多個壓電材 料,故較不易控制。
(a)top view (b)side view 圖1.6 Torii等人設計類似史都華平台的致動器[12] 在車用電子、測詴設備常常可見開關致動器的應用,依不同的致動原理,可 分為壓電式、電磁式、熱驅動式等,電磁式開關出力大但氣隙小。2005年Yao等 人以線圈、壓電材料設計出的混合式致動器[13]圖1.7所示,具有出力大、氣隙大 的優點,利用壓電樑產生撓曲,使致動器氣隙達到400µm、出力約為200µN。
8
圖1.7 Yao等人設計的混合式致動器[13]
音圈致動器(Voice-Coil Actuator)或稱音圈馬達(Voice Coil Motor),是屬於線 性直流馬達(Linear Direct-Current Motor)的一種,其優點在於其線性控制的特性、 零磁滯(Zero Hysteresis)、高精密度、體積小,低噪音等,應用在精密產品上已有 逐漸取代使用旋轉式馬達的傳統致動器。 2009年Liu等人將致動器的可動件設計成圓柱形,以兩側線圈搭配彈簧的使 用來驅動可動件如圖1.8所示[14],其目的為希望將致動器微小化,能夠運用在手 機、相機的鏡頭中調整焦距,此致動器的全行程為0.5mm、定位重複精度可達 5µ m。 圖1.8 Liu等人設計的音圈致動器[14]
9 2010年Hisayuki等人將兩個L型結構利用懸臂樑連接起來如圖1.9所示[15], 以懸臂樑導引可動件產生直線的位移,此致動器全行程為280µm、解析度最高為 1µ m、出力最大可達20mN。 圖1.9 Hisayuki等人設計的致動器[15] 上述的相關研究中,以尺蠖式致動原理設計的致動器,結合多個致動元件(壓 電材料、線圈),使致動器具有平移、旋轉多自由度且全行程理論上可達到無限 長,優於本研究所設計得混合式致動器,僅有單自由度、全行程為數毫米,但多 個致動元件也會造成不易控制以及體積增加的缺點。而位移解析度方面,本研究 的混合式致動器則優於上述的相關研究,最高解析度約為1.7µm。另外,由於尺 蠖式致動器的出力大小取決於線圈吸附於鐵磁性材料上所產生的摩擦力大小,而 本研究所設計的致動器則是直接以線圈產生的電磁力來驅動可動件,故在相同的 電磁力作用下可以產生較大的推力。而音圈致動器的設計出力大,但若是要將致 動器定位在某個目標點上,則必頇使線圈持續不斷的通電產生磁場,相較於本研
10
究所設計的致動器,到達設定的目標點後,利用摩擦力將可動件固定於目標點處, 減少了能量的損耗。此外,由於動、靜摩擦力能夠迅速的轉換,使本研究的致動 器較音圈致動器具有更大的夾持力而能夠快速的靜止下來。
11
論文結構
第一章 緒論 本章為緒論,介紹研究背景與動機,對相關文獻加以整理與探討,並說明本 研究之目的,並進一步構思相關的研究方法,最後說明本論文之架構。 第二章 預備知識 介紹致動器所用到的各種元件之原理與應用,分為三個部分,最後提及選用 各種元件時之注意事項。 第三章 致動器設計 將致動器中最重要的整體機構設計、所運用的致動原理、簡單的控制電路做 詳細的介紹。 第四章 實驗 本章節討論實驗之流程並展示此研究之實驗所得結果 第五章 結論與展望 說明研究之心得與結論,並提出其他後續可深入研究的方向與相關建議,改 進目前所發現的缺失,說明實驗的參數調整注意事項,提高致動器性能。12
二、 預備知識
2.1.1 電磁鐵的原理及運用
西元 1819 年,丹麥的物理學家厄斯特(Oersted, 1777-1851)偶然的發現一條 通有電流的導線,靠近一個可以自由轉動的磁針,發現磁針竟然產生偏轉,如果 使電流流向相反,磁針竟也產生反向偏轉。這現象表示載流導線的周圍一定有磁 場存在,才會影響磁針偏轉的方向,隨後法國物理學家安(Ampere, 1775-1836)進 行深入而詳細的研究,發現了電流和其所產生的磁場間的關係。此後,許多科學 家便詴圖尋找由磁產生電的逆效應。在電流磁效應被發現後不久,大約在 1825 年,英國人斯特金(William Sturgeon, 1783-1850)將通有電流的金屬線纏繞在絕緣 的鐵棒上而發明了電磁鐵,電磁鐵和一般永久磁鐵最大的差別,是電磁鐵可以藉 由改變通過線圈的電流大小及線圈的匝數來控制磁性的大小,而一般磁鐵的磁性 則是固定的。因此,電磁鐵在實驗室及生活應用上都相當重要,像電動機、發電 機、起重機等,都運用到電磁鐵。 一般電磁致動器所使用的電磁線圈主要由導線及導磁體構成,由於其構造簡 易且多變化,製造、組裝方便,利用簡單的電路即可控制,這項優勢使得電磁線 圈很容易搭配在各種機構之中,而利用電磁線圈所開發來的電磁致動器也有將體 積密緻化的潛力。線圈通入電流後會產生磁力,決定磁力大小的因素取決於磁迴 路的設計、線圈匝數以及電流的大小。13
2.1.2 電磁推力
圖 2.1 電磁推力致動示意圖 圖 2.1 為電磁推力致動示意圖,環電流在非均勻磁場 B 中所受之力可表示為 如下形式:B
m
B
IdS
s
BdS
n
s
I
F
(
)
(
)
(
)
(2-1) I :通入線圈之電流 B:磁通密度 S:線圈環路所圍之面積 m:磁偶極矩 H:磁場強度 其中 F 為永久磁鐵與線圈所產生之推力表示為: T z y xF
F
F
F
[ ] 且 T z y xm
m
m
m
[ ] 根據卡式座標將其三軸分開,其形式如下:14
H
m
F
x
x
0F
m
H
y y
0F
m
H
z z
0 (2-2) (H/m) 10 4 -7 0 為任意空間之導磁係數。 將 2-2 式展開: z H y H x H x z x y x x xm
m
m
F
0
0
0 z H y H x H y z y y y x ym
m
m
F
0
0
0 (2-3) z H y H x H z z z y z x zm
m
m
F
0
0
0 其中磁場強度 H 可表示為 H H
x,y,z,I
h x,y,zI
(2-4) T z y x x y z h x y z h x y z h h 定義為 [ ( , , ), ( , , ), ( , , )] 帶入 2-4 式可得: T z y x x y z I h x y z I h x y z I h H [ ( , , ) , ( , , ) , ( , , ) ] (2-5) 故可將 2-3 重新表示為:
I z h m y h m x h m F x z x y x x x 0 0 0 }
I z h m y h m x h m Fy x y y y z y 0 0 0 } (2-6)
I z h m y h m x h m F z z z y z x z 0 0 0 } 由 2-6 式可得磁通密度B[Bx By Bz]T [bx by bz]T I 因本研究之致動器為單一自由度(定義為 X 軸向自由度),因此推力方程式 2-1 式 展開:15 x B m z B m y B m x B m F x x x z x y x x x 0 x B m z B m y B m x B m Fy x y y y z y x y (2-7) 0 x B m z B m y B m x B m F z x y z z y z x z 綜合 2-7 式: T x F F [ 0 0] (2-8) 其中 I K x y z I x b m x B m Fx x x x x ( , , ) 而 K(x,y,z) 為一非線性的位移函 數。2-8 式可表示為F K(x)I。由此可得推力僅與位移方向的間距以及線圈內 電流大小有關。
2.2 永久磁鐵
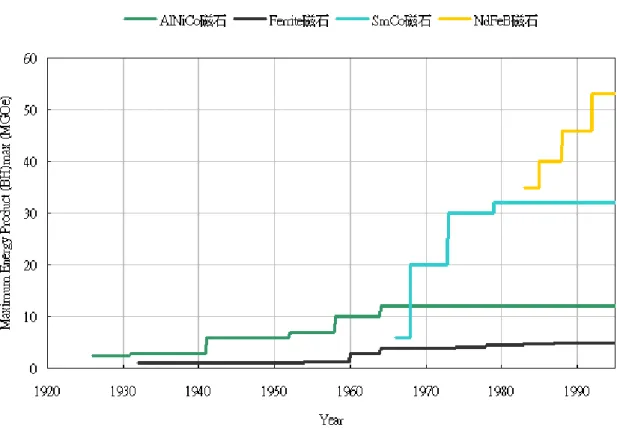
磁鐵的種類繁多, 一般分為永磁(硬磁)和軟磁兩大類,而永磁又分二大類: 第一大類是:金屬合金磁鐵包括釹鐵硼磁鐵(Nd2Fe14B)、釤鈷磁鐵(SmCo)、鋁鎳 鈷磁鐵(ALNiCO);第二大類是:鐵氧體永磁材料(Ferrite)。鐵磁性物質都會有磁 滯現象的產生,磁滯曲線的形狀以及大小也關係著磁性材料的性能優劣[14]。 磁性材料的特性可由磁滯曲線來判斷,如圖2-2所示,橫軸為施加於磁性材 料的磁場強度,縱軸為磁化的磁場強度,故此曲線稱為M-H曲線。磁化曲線一般 來說是非線性的,由曲線上可看出兩個特點,磁飽和現象及磁滯現象。當外加磁 場沿著A→B增加到磁場強度H足夠大時,磁化強度M達到一個確定的飽和值Ms, 如圖上的B、G點,當繼續增大H,Ms保持不變,當材料的M值達到飽和後,外16 磁場H降低為零時,M並不恢復為零,此即為磁滯現象,虛線A-B的斜率為磁導 係數µ。 圖 2.2 永久磁石磁滯曲線圖 磁性材料常用的磁性能參數,飽和剩磁強度 Ms,其大小取決於材料的成分, 它的物理意義為材料內部的磁化量整齊排列。殘留磁感應強度 Mr,此為磁滯區 線上的特徵參數,外加磁場 H 回到零時的 M 值。矯頑力 Hc,是表示材料磁化難 易程度的量,取決於材料的成分及缺陷,如雜質、應力等,磁導率 µ 與物件的工 作狀態密切相關[15]。磁滯區線所圍的面積大小及形狀取決於矯頑力 Hc 的大小, 表示材料磁化難易程度的量,受材料的的成分及缺陷,如雜質、應力等影響。所 圍面積較大者稱為硬磁體;較小者稱為軟磁體。
17
針對不同的需求選擇軟磁性材料或硬磁性材料使用,如使用在變壓器上就頇 選擇軟磁性材料較為合適。硬磁材料在做過磁化處理後,磁性不易消失,可用來 做為永久磁鐵使用。圖2.3為永久磁鐵磁能積(Magnetic Energy Product)的發展史 及各類永久磁石的特性表附錄B與優缺點比較表2.2。
圖 2.3 永久磁鐵磁能積發展史 (Data from Spin Technology Corp. in Taiwan)
18 表 2.1 永久磁鐵優缺點比較 優點 缺點 鋁鎳鈷磁石 殘留感應磁力 Br 高 溫度係數最低 矯頑磁力 iHc 極低,易退磁 主要原料中鈷及鎳價格不穩定 鐵氧燒結磁石 主要原料豐富,價格最低廉 化學安定性優異,不需表面處理 磁性能較差 溫度係數偏高 釤鈷燒結磁石 磁性能優異 溫度穩定性佳 不需表面處理 主要原料釤及鈷價格高昂 機械強度低,加工不易 釹鐵硼燒結磁石 磁性能最優異 主要原料較釤鈷磁石價格低 機械強度較釤鈷磁石高 溫度穩定性較差 易氧化,需表面處理 釹鐵硼粘結磁石 形狀自由度高 尺寸精度高 可製成軟性磁石 可與其他零件一體成形 磁性能較燒結磁石低下
(Data from Spin Technology Corp. in Taiwan)
鋁鎳鈷磁石是由鋁、鎳、鈷、鐵和其它微量金屬元素構成的一種合金磁性工 具。鑄造工藝可以加工生產成不同的尺寸和形狀,可加工性很好。鐵氧體磁鐵特 點:它主要原料包括BaFe12O19和SrFe12O19。通過陶瓷工藝法制造而成磁性工
19 具,質地比較硬,屬脆性材料。釤鈷磁鐵又稱釤鈷磁鋼,是由釤、鈷和其它金屬 稀土材料經配比,溶煉成合金,經粉碎、壓型、燒結後制成的一種磁性工具材料。 相對於一般鑄造鋁鎳鈷磁鐵系永磁材料和鐵氧體永磁材料,釹鐵硼磁鐵具有極高 的磁能積和矯頑磁力,可吸起相當於自身質量的640倍的物體。由於其高磁通能 量密度且造型尺度可依照需求自行設計,符合本研究所需之磁石特性,故選取此 類磁鐵。
2.3 摩擦力
兩個互相接觸的物體,其接觸面間有相對運動或相對運動的趨勢時。接觸面 會生出一個阻止相對運動之力,即為摩擦力。若施力與物體且物體與接觸表面間 只有相對運動之趨勢而無相對運動,此時的摩擦力稱為靜摩擦力,若施力超過最 大靜摩擦力則兩物體間產生相對運動,此時之摩擦力稱為動摩擦力。摩擦力的應 用在日常生活隨處可見,如:以釘子釘入物體、人走路、車子加速前進或剎車等。 早在西元 1508 年,科學家達文西(Leonardo da- Vinci, 1452-1519)就對摩擦力進行 了一系列的研究,關於二個接觸面之間的摩擦力,他提出二個規則,(1)摩擦力 與其負載成正比、(2)摩擦力與接觸面積大小無關。繼達文西之後,有三位法國 科學家對摩擦力做了定量的研究。法國科學家阿蒙頒(Amontons, 1663-1705)重新 研究摩擦力,並於西元 1699 年加入第三條:(3)摩擦力與接觸表面的相對速度無20 關,摩擦力與負載成正比。西元 1750 年,法國數學家尤拉(Euler, 1707~1783)用 數學式把阿孟頒實驗的主要結果寫下來: Fs:最大靜摩擦力 Fs =
µ
sNµ
s:靜摩擦係數 N :正向力Fk:動摩擦力 Fk =
µ
kNµ
k:動摩擦係數 N :正向力21
三、 致動器設計
3.1 致動器架構、原理
本研究之致動器的組成包含一個可動件(鋼柱)、兩個線圈、鑲於可動件兩端 的永久磁鐵、壓電材料、用來調整預壓的撓性結構,以及一 V 形凹槽的底座做 為可動件的導引槽,使可動件做單一自由度的往復運動。另外為了避免可動件在 移動時產生旋轉的現象而影響到致動器的精度,所以將可動件設計成類似半圓形 的圓柱,如圖 3.1 所示,圖 3.2 為致動器整體構造示意圖,圖 3.3 為致動器實體 圖。 圖3.1 可動件示意圖22
圖3.2 致動器示意圖
23 壓電材料鑲於底座的側邊,將壓電材料通以弦波形式的電壓訊號,使壓電材 料產生伸長-縮短的往復運動,並將能量傳遞予底座,隨著弦波頻率漸增,當頻 率達到整個系統的共振頻率時,鋼柱與底座間會有相對滑動的趨勢產生,此時鋼 柱與底座間的接觸摩擦力即由最大靜摩擦力轉變為動摩擦力,若將線圈通以電流 而產生磁力,且線圈與永久磁鐵間的吸、推力大於鋼柱與底座間的動摩擦力,則 鋼柱與底座便會產生相對滑動的現象。 將上述原理做更進一步的運用,首先調整線圈的電流值,使線圈與永久磁鐵 間的推、吸力大小介於鋼柱與底座接觸面上最大靜摩擦力與動摩擦力之間,並利 用電路控制通往壓電材料的震動來切換接觸面的狀態,電路圖如附錄A所示,達 到類似開關的作用,此時得到的弦波訊號為非連續的訊號,如圖3.4所示。當開 關為開時,電壓訊號為弦波訊號,則鋼柱與底座間的摩擦力為動摩擦力,此時可 動件產生與推、吸力方向平行的位移;反之若開關為關時,電壓訊號為直流時, 則鋼柱與底座間的摩擦力為靜摩擦力,此時可動件的摩擦阻力等於線圈所施予的 推、吸力,故不產生位移。
24
訊號產生器
LabVIEW訊號
PC控制
開關電路
壓電材料
8051單晶片
圖3.4 非連續電壓訊號示意圖3.2 系統整合
圖3.5為實驗儀器量測流程圖,由自行編寫的LabVIEW程式送出訊號,經由 National Instrument(NI)所製造的PCIe-6259資料擷取卡輸入8051單晶片,使單晶片 輸出相對應的方波訊號來控制開關電路,利用Kenyence公司所生產的雷射位移感 測器來量測致動器的位移量,並將量測到的位移訊號轉換為電壓訊號回傳到電腦 記錄量測數據。25
電源供應器
開關電路
DAQ卡
雷射位移感測器
以電腦操作
LabVIEW程式
8051
單晶片
致動器
訊號產生器
輸出方波 輸 出 弦 波 量 測 致 動 器 真 實 位 移 量 圖3.5 實驗儀器量測架設圖3.2.1 資料擷取卡
資料擷取作業可用於量測物理或電子現象,如電壓、電流、溫度、壓力、 或聲音等類比訊號,再將此類比訊號執行量化與編碼轉成數位訊號,此動作稱為 A/D 轉換,再由電腦讀入做進一步的分析。一般為了使類比訊號能夠忠實的還原, 因此訊號在類比與數位間的轉換速率,即所謂的取樣率,就必頇盡可能的提高。 本實驗中所使用的資料擷取設備為 National Instrument 公司生產的 M 系列多 功能資料擷取卡,產品名稱為 PCIe-6259DAQ Card,如圖 3.6,此卡結合了 NI-STC2 系統控制器、NI-PGIA2 可程式化的放大器,和 NI-MCal 校準技術,於高速取樣26 率下仍能保持穩定,增進效能和準確度,擁有相當優異的資料擷取能力。 其相關規格特性如下: 1 倍 PCI Express 介面可提升頻寬 可向下相容針對 PCI 撰寫的軟體 4 個 16 位元解析度的類比輸出 (2.8 MS/s 取樣率) 48 個數位 I/O;32 位元計數器 相關 DIO (32 個時脈通道、10 MHz);類比與數位觸發
NI-DAQmx 驅動軟體與 NI LabVIEW SignalExpress 互動式資料記錄軟體
圖 3.6 NI PCIe-6259 資料擷取卡
3.2.2 雷射位移感測器
位移感測器常用來量測精密位移、振動量或監控自動化製程中的加工機器等, 位移感測器種類繁多,大致可分為兩種類型:接觸式、非接觸式,依使用的場合 不同選用合適的感測器,好的位移感測器必頇同時具備速度,精度和卓越性能。
27 本實驗所使用的位移感測器為非接觸式的雷射位移感測器,由 KEYENCE 公司所生產的 LK-G5000 系列的 LK-H020 如圖 3.7 所示,此感測器的特點為高傳 輸速度、高精度及不受量測物體表面不平整影響。感測器的量測範圍為
±
3mm ,其量測原理如圖 3.8 所示,使用三角型量測法檢測 RS-CMOS 反射光的位置, 透過檢測該變化就能量測目標物的位置。 圖 3.7 KEYENCE LK-H020 雷射位移感測器 圖 3.8 雷射位移感測器量測原理28
四、 實驗
本研究進行了以下的實驗來測詴所設計之混合式電磁壓電致動器的特性: (1)調整輸入方波之頻率、Pulse Width、(2)速度測詴、(3)定位控制、 (4)拉力測詴、(5)系統共振頻率量測。實驗中所需調整的參數為方波的頻率以及 方波低電位寬度,如表 4.1 所示,可分為兩種操作模式。 表 4.1 實驗參數對照表方波 Pulse Width (µs) 頻率(Hz) 線圈電流(A) Mode 1 (高解析度步進模式) 500 3.33 0.5 Mode 2 (快速步進模式) 10000 3.22 0.5
4.1 實驗流程與設備
圖 4.1 為實驗的量測流程圖,首先從電腦操作 LabVIEW 程式,合併 8051 單 晶片的使用,送出方波訊號到開關電路中,再由電路送出的非連續電壓訊號來控 制致動器的位移,接著利用雷射位移感測器量測致動器的位移量,並將量測到的 位移訊號回傳給電腦記錄下來。29
PC
NI
PCIe-6259
開關電路
電磁壓電致動器
雷射位移感測器
KENYENCE LK-H0208051
單晶片
圖 4.1 實驗量測流程圖 本實驗量測時所需的設備有: 1. NI 公司 PCIe-6259 的 DAQ 擷取卡。 2. KENYENCE 公司 LK-G5000 系列的控制器以及 LK-H020 雷射位移感測器。4.2.1 調整輸入方波之頻率、
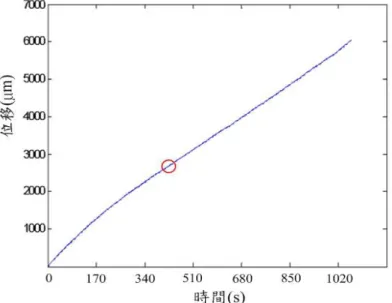
Pulse Width 由 8051 單晶片輸入一方波訊號控制開關電路,使致動器達到步進的效果。 實驗中通入兩線圈內的電流固定為 0.5A,調整方波 Pulse Width 為 500µs、方波 頻率為 3.33Hz (高解析度步進模式)時,量測致動器的位移量,實驗數據如圖 4.2 所示,圖 4.3 為圖 4.2 紅色圓圈處的局部放大圖,對照方波訊號圖可發現當方波 為低電位時,開關電路輸出為弦波訊號,致動器開始產生位移;而方波為高電位, 開關電路輸出轉為直流訊號時,由於慣性作用故致動器會持續位移一段距離後才30
靜止下來,且由實驗結果可得知此模式下致動器步進解析度約為 1.7µm。
圖 4.2 方波頻率 3.33Hz、Pulse Width 為 500µs 實驗數據圖
31 接著將線圈內電流固定為 0.5A,8051 單晶片輸出方波頻率調整為 3.22Hz、 方波 Pulse Width 為 10000µs (快速步進模式),此模式下開關電路輸出為弦波訊號 的時間加長,致動器單步的位移量也會增加,實驗數據如圖 4.4 所示,圖 4.5 為 圖 4.4 的紅色圓圈處的局部放大圖,當方波為低電位時,開關電路輸出為弦波訊 號,致動器開始產生位移;而方波為高電位,開關電路輸出轉為直流訊號時,由 於慣性作用所以致動器會持續位移一段距離後才靜止下來,且由實驗結果可得知 此模式下致動器步進解析度約為 41µm。 圖 4.4 方波頻率 3.22Hz、Pulse Width 為 10000µs 實驗數據圖
32 圖 4.5 方波頻率 3.22Hz、Pulse Width 為 10000µs 實驗數據局部放大圖 當提高方波頻率至 10Hz、方波 Pulse Width 為 33000µs 時,所得之實驗數據 經過局部放大後如圖 4.6 所示,對照方波訊號圖,當方波為低電位、開關電路輸 出為弦波訊號時,致動器產生明顯的位移;方波轉為高電位、開關電路輸出轉為 直流訊號時,致動器卻無法如預期靜止下來,此現象即為不可控制,故在選擇方 波頻率以及方波 Pulse Width 時,必頇避免超過臨界值而產生不可控制的現象。
33 圖 4.6 方波頻率 10Hz、Pulse Width 為 33000 實驗數據圖
4.2.2 速度測詴
本實驗設定致動器初始位置於 0mm 處,啟動致動器後,由雷射位移感測器 量測致動器位移量並回傳到電腦記錄下來,再將時間間隔 30 秒內所量測到的位 移量換算為致動器位移速度。由實驗發現當致動器操作在快速步進模式時,致動 器擁有較高的位移速度 109.95µm/s;操作在高解析度步進模式時,致動器位移速 度為 5.39µm/s。34
4.2.3 定位控制
此實驗的主要目的為測詴致動器之定位性能,設定致動器初始位置於 0µm 處移動到 3000µm 處,致動器在完成定位的過程設計為三個階段,如表 4.2 所示, 在第一個階段(快速衝刺)致動器位於 0µm~2000µm 間,此時控制單晶片輸出為 0V 使開關電路的輸出為連續弦波訊號,致動器在這個階段以連續位移不靜止的 方式前進,當致動器到達 2000µm 位置時進入第二個階段(快速步進),單晶片輸 出為 Mode 2 訊號,此階段致動器由連續位移轉換為以大步長步進的方式前進, 第三個階段(高解析度步進)為致動器到達 2850µm 位置時,單晶片輸出為 Mode 1 訊號,致動器在此階段由大步長的位移模式轉換為小步長的位移模式前進到設定 的目標。此外,當致動器到達目標時,以兩種不同的方法控制致動器定位在 3000µ m 處。方法一為固定單晶片輸出 Mode 1 的方波,控制線圈內電流方向使 致動器在目標點處震盪,實驗數據如圖 4.7 所示;方法二為固定單晶片輸出-
5V 的直流訊號,系統不產生共振,線圈內電流值為 0A,此時致動器在目標點處靜 止不動,實驗數據如圖 4.10 所示。 表 4.2 完成定位三階段 第一階段 (快速衝刺) 第二階段 (快速步進) 第三階段 (高解析度步進) 致動器位移模式 連續位移 大步長步進 小步長步進 單晶片輸出訊號 0V Mode 2 Mode 1 開關電路輸出訊號 連續弦波訊號 非連續弦波訊號 非連續弦波訊號35 由圖 4.7 可發現,以方法一定位上升時間約為 5.6 秒,圖 4.8 為位移模式轉 換的放大圖,當單晶片輸出由 0V 轉換為 Mode 2 時,由於慣性的關係,致動器 會滑行一段距離至 2610µm 才以大步長的模式步進前進,如圖 4.8(a)所示,當單 晶片輸出由 Mode 2 轉換為 Mode 1 時,同樣由於慣性的關係,致動器在到達 2850µ m 時會滑行一段距離到 2989µ m 才以小步長的模式前進到設定的目標,如 圖 4.8(b)所示。圖 4.9 為方法一定位實驗穩定後數據放大圖,致動器在 3000μm 處震盪,解析度約為 0.87µm(rms)。 圖 4.7 方法一定位實驗數據圖
36 (a) (b) 圖 4.8 位移模式轉換,(a)連續位移→快速步進,(b) 快速步進→高解析度步進 圖 4.9 方法一定位實驗,穩定後解析度約為 0.87µm(rms) 由圖 4.10 得知方法二定位上升時間約為 4.7 秒,圖 4.11 為位移模式轉換的 放大圖,當單晶片輸出由 0V 轉換為 Mode 2 時,由於慣性的關係,致動器會滑 行一段距離至 2805µm 才以大步長的模式步進前進,如圖 4.11(a)所示,當單晶片
37 輸出由 Mode 2 轉換為 Mode 1 時,同樣由於慣性的關係,致動器在到達 2850µm 時會滑行一段距離到 2979µm 才以小步長的模式前進到設定的目標。 圖 4.10 方法二定位實驗數據圖 (a) (b) 圖 4.11 位移模式轉換,(a)連續位移→快速步進,(b) 快速步進→高解析度步進
38 圖 4.12 為方法二定位實驗穩定後數據放大圖,致動器到達 3000±1μm 時靜止 下來,但由於所使用的雷射位移感測器輸出的位移訊號參雜背景雜訊,故所得的 實驗數據在達穩定時並非固定在3000μm 處,對照圖 4.13 雷射位移感測器背景雜 訊對照圖可發現背景雜訊值約為 0.2μm(rms)。 圖 4.12 方法二定位實驗達穩定後數據圖
39 圖 4.13 雷射位移感測器背景雜訊對照圖
4.2.4 拉力測詴
量測致動器拉力的原理如圖 4.14 所示,致動器透過線拉動一固定住的懸臂 樑使其產生撓曲,再由雷射位移感測器量測懸臂樑的變形量,經由下列公式計算 即可推得致動器的出力大小。:懸臂樑微小位移值
P :致動器出力大小
(4-1) a :懸臂樑固定端到受力點距離 E :懸臂樑楊氏系數 I :懸臂樑截面慣性矩 L :懸臂樑總長
40 懸臂樑截面積慣性矩可由下列公式計算的到:
b:懸臂樑厚度 c:懸臂樑寬度 本實驗中懸臂樑 a=30mm、b=0.6mm、c=5mm、L=47mm,圖 4.15 為懸臂樑 的尺寸大小示意圖。 圖 4.14 拉力量測原理 圖 4.15 懸臂樑示意圖,a=30mm、b=0.6mm、c=5mm、L=47mm
41 經實驗量測後可得致動器在高解析度步進模式下測得的拉力值約為 13.3mN, 在快速步進模式下測得的拉力值約為 17mN。
4.2.5 系統共振頻率量測
通往壓電材料的弦波訊號的頻率會影響到致動器的位移速度,當頻率達到整 個系統的共振頻率時,致動器的位移速度會達到最大值,因此為了使致動器擁有 較高的位移速度,首先必頇量測系統的共振頻率。實驗方法為設定單晶片輸出 Mode 2 的方波,再將輸入開關電路的弦波訊號由 45kHz 開始向上逐漸調整至 49kHz,利用雷射位移感測器量測致動器位移量再微分一次得到位移速度值。 圖 4.16 共振影響之頻譜 實驗結果可以從圖 4.16 得知所設計的致動器共振頻率約為 47kHz,操作在 此頻率下,可以使接觸面上動、靜摩擦力有最明顯的轉換,故在量測致動器速度、 出力大小等特性時,弦波訊號的頻率皆固定在 47kHz。42
4.2.6 摩擦力量測
本研究的重點之一為底座與可動件間動、靜摩擦力的轉換,因此進行了以下 的實驗,將摩擦力的值完整的量測出來。量測的過程如上視圖 4.17 所示,懸臂 樑底部透過一根細針與可動件接觸,確保可動件施予懸臂樑的作用力固定在同一 個點上,當系統未達到共振時,以精密位移平台調整懸臂樑基座產生 Y 方向的 位移,此時可動件與底座間的摩擦力值等於懸臂樑尾端撓曲所產生的恢復力,則 可動件靜止不動,隨著位移量逐漸增加,當懸臂樑的恢復力值超過可動件與底座 間的最大靜摩擦力時,可動件就會產生滑動,將滑動的瞬間所量測到的位移量ΔY 帶入式(4-1)即可換算得最大靜摩擦力值。相反地若系統未達到共振,重複上述的 動作,將滑動瞬間所量測到的位移量換算,即可得接觸面上動摩擦力的值。 圖 4.17 摩擦力量測上視圖43 底座與可動件間最大靜摩擦力與動摩擦力各量測十二次,實驗所得結果如圖 4.18 所示,最大靜摩擦力的平均值為 97.9mN、標準差為 3.06 mN,動摩擦力的 平均值為 76.3mN、標準差為 0.88 mN,由實驗結果可看出最大靜摩擦力與動摩 擦力相差約為 20mN。 圖 4.18 摩擦力實驗數據圖
44
五、結論與展望
本研究致動器設計的重點為運用簡單的原理,動、靜摩擦力間的轉換,成功 設計出單自由度的混合式致動器,並以電腦輔助設計的實體模型將整體機構實體 化,最後運用高精度的量測、擷取設備,經由實驗成功驗證其性能。 根據實驗量測的結果,本研究所設計的致動器具有長行程 6mm(雷射位移感 測器所能量測的最大範圍)、微米級的步進解析度,在快速步進模式下,致動器 步進解析度為 41µm、速度達 109.95µm/s、出力大小為 1891.9µN;在高解析度步 進模式下,致動器步進解析度為 1.7µm、速度達 5.39µm/s、出力大小為 1473.8µN。 在設計致動器時,設計的主要關鍵點為可動件與底座間動、靜摩擦力的轉換, 首先必頇選擇適當的材料和加工方式來製作可動件以及底座,若可動件與底座間 動摩擦力太大,線圈就無法順利趨動可動件產生位移,若摩擦力太小則會使可動 件無法迅速的靜止下來。另外,在設定單晶片輸出的方波頻率、Pulse Width 時, 必頇注意到是否會使致動器產生不可控制現象,由於慣性的關係,可動件會先滑 行一段距離後才靜止下來,若在可動件靜止之前,方波即進入了下個週期使可動 件產生下一步的位移,致動器就會產生不可控制的現象。 判斷致動器性能優劣的主要指標為速度、解析度、推力大小等,在未來發展 方面,可以選用不同的材料來製作底座與可動件,改變接觸面間摩擦力大小,使45
致動器能更快速的靜止下來,提高致動器位移速度、解析度。最後測詴致動器軌 跡追蹤特性的實驗。
46
六、參考文獻
[1] G. Binnig, et al., “Atomic Force Microscope,” Physical Review Letters, Vol.
56, 1986.
[2] G. Binnig, H. Rohrer, C. Gerber, and E. Weibel, “Scanning Tunneling
Microscope,” Physical Review Letters, Vol. 56, pp.57-61, 1986.
[3] 許溢適, 壓電陶瓷新技術 文笙書局, 1993.
[4] 周卓明, 壓電力學 全華科技圖書股份有限公司, 2003.
[5] H . Kato, A. Torii, and A. Ueda, “An XYθ Actuator with a Closed-loop Magnetic Field,” IEEE International Conference on Micromechatronics and
Human Science, pp.83-88, 1998.
[6] H . Aoyama, O. Fuchiwaki, “Flexible Micro_Processing by Multiple Micro Robots in SEM,” IEEE International Conference on Robotics and Automation,
Vol.4, pp.3429-3434, 2001.
[7] J. Goldstein, “Scanning Electron Microscopy and X-ray Microanalysis, ”
Kluwer Academic/Plenum Publishers, 2003 ISBN: 0306472929.
[8] M . Pakkratok., N. Luekiatphaisan, H. Aoyama, “Combination of VCA based micro force generator and micro robot for micro hardness and stiffness test,”
SICE Annual Conference, pp. 3184-3189, 2010.
[9] O. Fuchiwaki, H. Aoyama, “Piezo Based Micro Robot for Microscope
Instrument,” IEEE International Conference on Mechatronic Technology, C23,
2002.
[10] S. Yan, F. Zhang, Z. Qin and S. Wen, “A 3-DOFs mobiles robot diven by a piezoelectric actuator,” IOPscience SMART MATERIALS AN STRUCTURES,
pp. 17-13, 2006.
[11] D . Stewart, ”A Platform with Six Degrees of Freedom, ” Proc. Institution of
Mechanical Engineers (UK) Vol 180 (Pt 1, No 15), 1965.
[12] A. Torii, M. Banno, T. Tanahashi, A. Ueda, and K. Doki, ” Design and Performance of a Microactuator with Multi Degrees of Freedom,” IEEE
International Conference on Micro-NanoMechatronics and Human Science, pp. 507-512, 2008.
[13] Yao Fu, M. K. Ghantasala, E. Harvey and L. Qin, “Design and fabrication a hybrid actuator,” IOPscience Smart Materials and Structures, Vol 14,
pp.488 -495, 2005.
[14] Michael Ashby, Hugh Shercliff and David Cebon,”Materials : engineering, science, processing and design,“Oxford ; Burlington,
47
[15] R. Ortega and R. Kelly, ”PID self-tuners: Some Theoretical and Practical Aspects,” IEEE Transactions Ind. Electron., Vol. IE-31,1984, pp.332-338.
48
附錄A 開關電路圖
49
附錄B 磁石特性比較
特性 單位 鋁鎳鈷係 (AlNiCo) 鐵氧係 (Ferrite) 稀土係 (Rare Earth) 鋁鎳鈷 磁石 鐵氧 燒結磁石 鐵氧 粘結磁石 釤鈷 燒結磁石 釤鈷 粘結磁石 釹鐵硼 燒結磁 石 釹鐵硼 粘結磁 石 殘留磁束密度 Br Residual Induction kG 11.5 4.4 3.1 11.6 8.5 14.2 7.3 矯頑磁力 bHcCoercive Force kOe 1.6 2.8 2.4 10.1 7.6 11.7 5.7 本質矯頑磁力 iHc
Intrinsic Coercivity kOe 1.7 3.5 3.0 >5.3 11 >11 9 最大磁能積 (BH)max Maximum Energy Product MGOe 11 4.6 2.2 32 17 48 11 溫度係數α(Br) Temperature Coefficient α %/K -0.02 -0.18 -0.18 -0.0.3 -0.03 -0.11 -0.10 溫度係數β(iHc) Temperature Coefficient β %/K ~0 +0.4 +0.4 -0.2 -0.2 -0.6 -0.4 居禮溫度 Tc Curie Temperature ℃ 845 460 460 795 795 335 335 折斷強度 Flexure Strength kgf/mm 2 28 13 6 12 6 25 6 密度 ρ Density g/cm 3 7.3 5.0 3.6 8.4 7.0 7.5 6.0 硬度 Hv Hardness 650 530 550 80-120 600 80-120 電阻 Resistivity μΩ•cm 60 >10 10 80 44000 150 26000