非90°交錯角之ZN型蝸輪與ZK型蝸桿之接觸分析
90
0
0
全文
(2) 非 90 度交錯角之 ZN 型蝸輪與 ZK 型蝸桿之接觸分析 學生:廖健雄. 指導教授:蔡忠杓 博士 國立交通大學機械工程學系 摘. 要. 一般齒輪當齒數太少時,齒輪之齒面會產生過切現象,尤其是單段高 減速比齒輪組其輸入軸之齒數很少時,但是蝸桿蝸輪組可以克服此問題, 因此,蝸桿蝸輪組可提供一般正齒輪和螺旋齒輪無法提供的大減速比功 能。蝸桿蝸輪組屬於高接觸比的傳動機構,提高接觸比除了可以提高定位 精度和穩定度之外,亦可增加蝸桿蝸輪組之負載能力,更可以廣泛地使用 在某些特定的環境。本論文所探討之蝸桿蝸輪組具有非 90 度之交錯角,除 了可以增加齒輪組之接觸比,亦可藉由改變蝸桿蝸輪組之交錯角以獲得不 同之特性,增加其應用性。 本論文將應用齒輪原理以及電腦輔助設計技術,對於 ZN 型蝸輪與 ZK 型蝸桿,分別進行其齒面數學模式的建立,再依據所推導之齒面數學模式 和齒面接觸分析技術,探討蝸桿蝸輪組兩嚙合齒面之接觸情形,包括運動 誤差、瞬時接觸齒數、平均接觸比、接觸比與接觸齒印。本研究亦討論不 同之設計參數與交錯角對於蝸桿蝸輪組之接觸情形,並且探討蝸桿蝸輪組 在具有裝配誤差時,其接觸情形與接觸齒印。. i.
(3) Contact Analysis of the ZN Type Worm Gear and the ZK Type Worm with a Non-ninety-degree Crossing Angle Student: Jian-Xiong Liao. Advisor: Dr. Chung-Biau Tsay. Department of Mechanical Engineering National Chiao Tung University. Abstract Tooth undercutting may occur for conventional gear sets with a small number of teeth, especially for a single stage gear-set with a high reduction gear ratio. Nevertheless, worm gear sets can conquer this issue which spur and helical gear sets could not provide. Worm gear sets are transmission mechanism of high contact ratios. Increasing the contact ratio of a worm gear set not only improve position precision and stability, but also increase load capacity of the worm gear set, which enables it to apply to some particular environments. In this research, the worm gear set with a non-ninety-degree crossing angle not only increase the contact ratio but also obtain different properties by changing the crossing angle of a worm gear set. In this research, the mathematical models for the ZN type worm gear and the ZK type worm are developed based on the theory of gearing and the technique of computer aided design. According to the developed mathematical models and the tooth contact analysis technique, contact situations of a worm gear set, including kinematic error, instantaneous contact teeth, average contact ratio, contact ratio and contact ellipse are investigated. Besides, the influence of different design parameter and different crossing angle on the contact situation of a worm gear set are also studied. Furthermore, contact situation and contact ellipse of a worm gear set under ideal and error assembly conditions are investigated.. ii.
(4) 誌謝 本論文能順利完成,首先要感謝指導教授 蔡忠杓博士,感謝您 在研究方面不斷地指導,在論文寫作方面更是不厭其煩地指正,而您 在為人處事與研究方面的執著與努力更是讓學生佩服,學生除了感激 之外,對於您的諄諄教誨更是銘記在心。 在研究時遇到困難與瓶頸,家彰學長、瑞堂學長與冠宇學長總是 會伸出援手,與我一起討論,並提供我寶貴的經驗與建議,讓我受益 匪淺。在日常生活上,有德浩同學與信宏同學以及實驗室的學弟,讓 我在研究之餘仍然擁有歡樂與休閒,在此感謝學長與同學以及各位學 弟。 感謝父母親二十多年來辛苦的栽培與養育,在我唸書與研究的過 程中不斷地給予鼓勵與支持,使我能心無旁鶩地投入研究工作,在此 由衷地感謝我的父母親。. iii.
(5) 目錄 中文摘要. i. 英文摘要. ii. 誌謝. iii. 目錄. iv. 表目錄. vi. 圖目錄. viii. 第一章 緒論. 1. 1.1 前言. 1. 1.2 文獻回顧. 2. 1.3 研究方向. 3. 第二章 ZK 型蝸桿之數學模式. 4. 2.1 蝸桿之創成原理. 4. 2.2 蝸桿之數學模式. 4. 2.3 ZK 型蝸桿之電腦繪圖. 11. 第三章 ZN 型蝸輪之數學模式. 13. 3.1 前言. 13. 3.2 ZN 型滾刀之數學模式. 13. 3.3 ZN 型蝸輪之數學模式. 18. 3.4 蝸輪與滾刀之嚙合方程式. 22. 3.5 蝸輪之電腦繪圖. 25. 第四章 蝸桿蝸輪之接觸分析. 27. 4.1 前言. 27. 4.2 蝸桿蝸輪之齒面接觸模擬. 27. 4.3 運動誤差、接觸齒數與接觸比. 31. iv.
(6) 4.4 範例. 33. 4.5 討論. 55. 第五章 接觸齒印. 59. 5.1 前言. 59. 5.2 齒面外形法. 60. 5.3 接觸齒印範例. 65. 5.4 討論. 71. 第六章 結論與未來展望. 76. 6.1 結論. 76. 6.2 未來展望. 77. 參考文獻. 78. v.
(7) 表目錄 表 2.1 蝸桿與直邊磨輪之主要參數. 11. 表 3.1 蝸輪與蝸桿型滾刀之主要參數. 25. 表 4.1 蝸桿蝸輪組之設計參數. 33. 表 4.2 理想裝配條件下蝸桿 1 與蝸輪 1 之接觸情形. 35. 表 4.3 理想裝配條件下蝸桿 2 與蝸輪 1 之接觸情形. 36. 表 4.4 理想裝配條件下蝸桿 1 與蝸輪 2 之接觸情形. 37. 表 4.5 理想裝配條件下蝸桿 2 與蝸輪 2 之接觸情形. 38. 表 4.6 理想裝配條件下蝸桿 1 與蝸輪 3 之接觸情形. 39. 表 4.7 理想裝配條件下蝸桿 2 與蝸輪 3 之接觸情形. 40. 表 4.8 中心距誤差 ∆A = 0.2 mm,蝸桿 2 與蝸輪 2 之接觸情形. 41. 表 4.9 中心距誤差 ∆A = −0.2 mm,蝸桿 2 與蝸輪 2 之接觸情形. 42. 表 4.10 水平軸向誤差 ∆γ h = 0.1°,蝸桿 2 與蝸輪 2 之接觸情形. 43. 表 4.11 水平軸向誤差 ∆γ h = −0.1°,蝸桿 2 與蝸輪 2 之接觸情形. 44. 表 4.12 垂直軸向誤差 ∆γ v = 0.1°,蝸桿 2 與蝸輪 2 之接觸情形. 45. 表 4.13 垂直軸向誤差 ∆γ v = −0.1°,蝸桿 2 與蝸輪 2 之接觸情形. 46. 表 4.14 中心距誤差 ∆A = 0.2 mm,水平軸向誤差 ∆γ h = −0.1° ,蝸桿 2 與蝸輪 2 之接觸情形. 47. 表 4.15 中心距誤差 ∆A = 0.2 mm,垂直軸向誤差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之接觸情形. 48. 表 4.16 水平軸向誤差 ∆γ h = 0.1° ,垂直軸向誤差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之接觸情形. 49. 表 4.17 水平軸向誤差 ∆γ h = −0.1° ,垂直軸向誤差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之接觸情形. 50. vi.
(8) 表 4.18 中心距誤差 ∆A = 0.2 mm,水平軸向誤差 ∆γ h = 0.1° ,垂直軸向誤 差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之接觸情. 51. 表 4.19 中心距誤差 ∆A = −0.2 mm,水平軸向誤差 ∆γ h = −0.1° ,垂直軸向 誤差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之接觸情形. 52. 表 4.20 裝配條件與運動誤差值. 54. 表 5.1 ZK 型蝸桿與 ZN 型蝸輪組之主要設計參數. 65. vii.
(9) 圖目錄 圖 2.1 磨輪機構磨削蝸桿示意圖. 5. 圖 2.2 磨輪刀具面設計及參數示意圖. 6. 圖 2.3 磨輪磨削蝸桿齒面創成機構示意圖. 8. 圖 2.4 ZK 型蝸桿之電腦繪圖. 12. 圖 3.1 直邊車刀之法向剖面與位置關係圖. 15. 圖 3.2 蝸桿型滾刀之成形機構示意圖. 16. 圖 3.3 蝸桿滾削蝸輪之滾削機構示意圖. 19. 圖 3.4 蝸桿滾削蝸輪之滾削機構示意圖(續). 20. 圖 3.5 ZN 型蝸輪之電腦繪圖. 26. 圖 4.1 蝸桿蝸輪組之嚙合機構示意圖. 29. 圖 4.2 理想裝配條件下蝸桿 1 與蝸輪 1 之接觸齒數與運動誤差. 35. 圖 4.3 理想裝配條件下蝸桿 2 與蝸輪 1 之接觸齒數與運動誤差. 36. 圖 4.4 理想裝配條件下蝸桿 1 與蝸輪 2 之接觸齒數與運動誤差. 37. 圖 4.5 理想裝配條件下蝸桿 2 與蝸輪 2 之接觸齒數與運動誤差. 38. 圖 4.6 理想裝配條件下蝸桿 1 與蝸輪 3 之接觸齒數與運動誤差. 39. 圖 4.7 理想裝配條件下蝸桿 2 與蝸輪 3 之接觸齒數與運動誤差. 40. 圖 4.8 中心距誤差 ∆A = 0.2 mm,蝸桿 2 與蝸輪 2 之接觸齒數與運動誤 差. 41. 圖 4.9 中心距誤差 ∆A = −0.2 mm,蝸桿 2 與蝸輪 2 之接觸齒數與運動誤 差. 42. 圖 4.10 水平軸向誤差 ∆γ h = 0.1° ,蝸桿 2 與蝸輪 2 之接觸齒數與運動 誤差. 43. 圖 4.11 水平軸向誤差 ∆γ h = −0.1° ,蝸桿 2 與蝸輪 2 之接觸齒數與運動 誤差. 44. viii.
(10) 圖 4.12 垂直軸向誤差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之接觸齒數與運動 誤差. 45. 圖 4.13 垂直軸向誤差 ∆γ v = −0.1° ,蝸桿 2 與蝸輪 2 之接觸齒數與運動 誤差. 46. 圖 4.14 中心距誤差 ∆A = 0.2 mm,水平軸向誤差 ∆γ h = −0.1° ,蝸桿 2 與 蝸輪 2 之接觸齒數與運動誤差. 47. 圖 4.15 中心距誤差 ∆A = 0.2 mm,垂直軸向誤差 ∆γ v = 0.1° ,蝸桿 2 與 蝸輪 2 之接觸齒數與運動誤差. 48. 圖 4.16 水平軸向誤差 ∆γ h = 0.1° ,垂直軸向誤差 ∆γ v = 0.1° ,蝸桿 2 與蝸 輪 2 之接觸齒數與運動誤差. 49. 圖 4.17 水平軸向誤差 ∆γ h = −0.1° ,垂直軸向誤差 ∆γ v = 0.1° ,蝸桿 2 與蝸 輪 2 之接觸齒數與運動誤差. 50. 圖 4.18 中心距誤差 ∆A = 0.2 mm,水平軸向誤差 ∆γ h = 0.1° ,垂直軸向誤 差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之接觸齒數與運動誤差. 51. 圖 4.19 中心距誤差 ∆A = −0.2 mm,水平軸向誤差 ∆γ h = −0.1° ,垂直軸向誤 差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之接觸齒數與運動誤差. 52. 圖 4.20 蝸桿與蝸輪在不同壓力角時之接觸點軌跡圖. 53. 圖 4.21 滾刀與蝸輪在 45°交錯角下嚙合之接觸線. 56. 圖 4.22 ZN 型滾刀與 ZK 型蝸桿之剖面示意圖. 57. 圖 5.1 嚙合齒面與其切平面關係圖. 61. 圖 5.2 接觸點與其切平面座標關係圖. 62. 圖 5.3 蝸桿壓力角對接觸齒印之影響(範例一). 67. 圖 5.4 蝸輪壓力角對接觸齒印之影響(範例二). 68. 圖 5.5 磨輪半徑對接觸齒印之影響(範例三). 69. 圖 5.6 蝸桿剖面與磨輪節圓半徑之關係. 70. ix.
(11) 圖 5.7 中心距誤差對接觸齒印之影響(範例四). 72. 圖 5.8 水平軸向誤差對接觸齒印之影響(範例四). 73. 圖 5.9 垂直軸向誤差對接觸齒印之影響(範例四). 74. x.
(12) 第一章. 緒論. 1.1 前言 蝸桿蝸輪組屬於空間交錯軸之動力傳動元件,常用於交錯軸傳動 且需要較大減速比的傳動場合。一般齒輪在設計上是以其節圓(Pitch Circle)或節圓面(Axode)為假想圓或假想面,在節點(Pitch Point)或節 線(Pitch Line)處以純滾動來傳遞動力,而節圓半徑決定於齒輪之齒數 及模數。然而齒輪在特定模數下當齒數太少時,齒輪之齒面會產生過 切現象(Undercutting)。因此,若欲以傳統正齒輪來達到大減速比之傳 動時,必須使用多級之減速機構才能達成,且會佔據相當大的空間, 非常不方便。而以蝸桿蝸輪組而言,蝸桿之節圓半徑設計上是以蝸桿 蝸輪之中心距減去蝸輪之節圓半徑而得,因此,蝸桿之節圓半徑與蝸 桿齒數並無直接之關聯,使得蝸桿蝸輪組單級傳動即可實現較大之傳 動比(一般約為 8 到 100),因此,單級之蝸桿蝸輪傳動其減速比可代 替多級之一般齒輪傳動所可達到之減速比,不僅可以減少齒輪之數 目,更可以簡化傳動機構。同時,當蝸桿導程角小於蝸輪組摩擦角時, 可以使蝸桿蝸輪組在傳動時具備自鎖(Self Locking)功能,能夠容忍一 定的振動與衝擊。 因為蝸輪組在傳動上是以滑動為主,所以齒面之磨耗也比較嚴 重,同時也會因嚙合摩擦而導致齒面有溫升現象產生,因此,必須注 入潤滑油於兩嚙合齒面之間以排除熱量並降低磨耗。同時,在設計配 對嚙合之蝸桿蝸輪組時,亦需考量設有齒隙(Backlash)以排除齒面磨 損所造成之鐵屑或外界雜物,但如果主動輪(蝸桿)有反向旋轉時,過 大的齒隙會使得齒輪組產生一段非接觸時間,當使用在高速傳動的場 合中,將產生主動輪齒面撞擊被動輪齒面的現象而加速齒面之疲勞破 壞,這也是齒輪振動噪音的主要原因。在設計上,提高蝸桿蝸輪組的 1.
(13) 接觸比能夠改善上述之缺失,並且能夠降低齒面之平均負載,使得齒 輪組能運用在較高負載的場合中,增加其使用性與耐久性。 一般齒輪傳遞動力時在齒輪之節點附近係以滾動為主,而蝸桿蝸 輪組傳遞動力則以滑動為主。由於蝸桿蝸輪組係屬於多齒接觸(通常 為 2 至 3 齒)之傳動,因此,蝸桿蝸輪組在傳動時較為平穩且噪音也 較小。因為蝸桿蝸輪組具備以上優點,所以,被廣泛地應用於連續分 度機構、汽車轉向機構、高樓電梯之減速機構等需具有較大減速比的 場合。而近年來,隨著工業產品對其定位精密度之要求較高,如雷達、 大型天文望遠鏡之赤道儀以及精密工具機工作台之定位機構等,也多 採用雙導程蝸桿蝸輪機構。 1.2 文獻回顧 Zheng 等[1][2]人於 1989 年,利用一條動線(Generating Line)在空 間中運動所產生之軌跡面,用來表示蝸桿之齒面,並討論其製造加工 程序。Janninck[3]則於 1988 年提出齒面外形法(Surface Topology Method),來模擬利用增徑滾刀(Over Size Hob Cutter)滾削蝸輪時其創 成齒面之接觸情形。Bair 和 Tsay[4]於 1998 年則探討了 ZK 型蝸桿蝸 輪組之接觸齒數、接觸比和運動誤差(kinematic Error)。Fang 和 Tsay[5] 於 2000 年推導出 ZN 型蝸桿蝸輪組之齒面數學模式,並研究利用增 徑滾刀來滾削 ZN 型蝸輪及此蝸桿蝸輪組之接觸分析(Tooth Contact Analysis),除計算蝸桿蝸輪組之接觸點及其接觸齒印(Contact Pattern) 的大小與形狀,並探討其嚙合接觸路徑(Contact Path)。陳嘉宏[6]於 2003 年進行非 90°交錯角之飛刀(Fly Cutter)創成的蝸輪與 ZK 型蝸桿 之齒面數學模式推導,並進行蝸桿蝸輪組之接觸分析。. 2.
(14) 1.3 研究方向 本研究將依據 Litvin[7][8]所發展的齒輪原理並配合電腦輔助設 計與分析之技術,針對非 90°交錯角之蝸桿蝸輪組進行齒面接觸特性 與齒印分析的研究。本研究共分為下列四大主題: 一.首先利用直邊磨輪機構,以創成法求得 ZK 型蝸桿之齒面數學模 式。 二.以創成法求得用以切削蝸輪之蝸桿型滾刀( Hob Cutter )之齒面數 學模式,並利用所得之蝸桿型滾刀來滾切蝸輪。模擬滾切蝸輪的過 程中,則是利用創成法求得蝸輪之齒面數學方程式。 三.針對此蝸桿與蝸輪兩齒面間的接觸情形進行其齒面嚙合分析與研 究,探討齒輪組在正常裝配狀況下與具有軸向之裝配誤差狀況下, 以及 ZK 型蝸桿在不同交錯角下,蝸桿蝸輪組之傳動特性與接觸比。 四.接觸齒印的大小及位置對於齒輪的負載能力及壽命有很大的影 響。因此,本研究亦將探討各種裝配狀況下的接觸齒印。. 3.
(15) 第二章 ZK 型蝸桿之數學模式 2.1 蝸桿之創成原理 本研究所探討的蝸桿類型屬於單包絡 ZK 型蝸桿,是利用錐狀盤 形磨輪所創成,圖 2.1 即為磨輪機構在磨削蝸桿時之示意圖。蝸桿為 本研究非 90°交錯角蝸桿蝸輪組之主動機構。當齒面是以創成法所加 工出來時,因為 ZK 型蝸桿之齒面為磨輪刀具之包絡面,且被創成之 蝸桿齒面與磨輪刀具間之接觸恆保持相切之情況,因此,在推導蝸桿 齒面數學模式時,除了需考量磨輪刀具在被切削蝸桿座標系之軌跡方 程式外,還需要考慮磨輪刀具與蝸桿齒面間的嚙合方程式。另外,磨 輪之左刀具面創成了蝸桿之右齒面,而磨輪之右刀具面則創成了蝸桿 之左齒面。 2.2 蝸桿之數學模式 如圖 2.2 所示為磨輪之外形設計及參數,直邊磨輪刀具方程式及 其法向量表示在固聯於磨輪直邊刀刃上之座標系 Sgf (X gf ,Ygf ,Z gf ) 可表 示如下:. R gf. u 1 cos α1 ⎡ ⎤ ⎢ ⎥ 0 ⎥ =⎢ ⎢± (b1 − u1 sin α1 )⎥ ⎢ ⎥ 1 ⎣ ⎦. (2.1). n gf. ⎡ sin α1 ⎤ = ⎢⎢ 0 ⎥⎥ ⎢⎣± cos α1 ⎥⎦. (2.2). b1 =. πm a cosλ + rc tanα1 4. 其中, u 1 為直邊磨輪刀具之刀面設計參數,α1 為直邊磨輪刀具的法向 壓力角, m a 為直邊磨輪刀具面之軸向模數(Axial Module), λ 為蝸桿 齒面之導程角,rc 為直邊磨輪刀具面之節圓半徑,在本章中凡有“ ± ". 4.
(16) 圖 2.1 磨輪機構磨削蝸桿示意圖 5.
(17) 圖 2.2 磨輪刀具面設計及參數示意圖 6.
(18) 或“ m "符號,其上方符號均代表磨輪右刀具面或是由磨輪右刀具面 所創成之左齒面,下方符號均代表磨輪左刀具面或是由磨輪左刀具面 所 創 成 之 右 齒 面 。 利 用 齊 次 座 標 轉 換 (Homogeneous Coordinate Transformation)可將刀具面之位置向量及其法向量轉換至固聯於磨輪 之參考座標 Sc (X c ,Yc ,Z c ) 並表示如下: ⎡X c ⎤ ⎡ u 1 cos α1 cos θ ⎤ ⎢ Y ⎥ ⎢ u cos α sin θ ⎥ 1 ⎥ Rc = ⎢ c ⎥ = ⎢ 1 ⎢ Z c ⎥ ⎢± (b1 − u1 sin α1 )⎥ ⎢ ⎥ ⎢ ⎥ 1 ⎣1 ⎦ ⎣ ⎦. (2.3). ⎡n xc ⎤ ⎡sinα1cosθ⎤ n c = ⎢⎢ n yc ⎥⎥ = ⎢⎢ sinα1sinθ ⎥⎥ ⎢⎣ n zc ⎥⎦ ⎢⎣ ± cosα1 ⎥⎦. (2.4). 圖 2.3 為磨削蝸桿機構示意圖,Sc (X c , Yc , Z c ) 座標系為磨輪之座標系, Sfc (X fc , Yfc , Z fc ) 座標系為參考座標系,S1 ( X1 , Y1 , Z1 ) 座標系為蝸桿之座標. 系,圖中所示之符號 p1 表示蝸桿齒面之導程, ϕ1 則為蝸桿做螺旋運動 之旋轉角。經由下列之齊次座標轉換,即可將磨輪刀具面之軌跡方程 式表示於蝸桿之 S1 座標系如下: R1 = M1,1f M1f,fc M fc,c R c = M1,c R c. 其中. M fc,c. 0 0 ⎡1 ⎢0 cos λ − sin λ =⎢ ⎢0 sin λ cos λ ⎢ 0 0 ⎣0. M1f ,fc. ⎡1 ⎢0 =⎢ ⎢0 ⎢ ⎣0. 0 1 0 0. 0⎤ 0⎥⎥ 0⎥ ⎥ 1⎦. 0 A1 ⎤ 0 0 ⎥⎥ 1 − p1ϕ1 ⎥ ⎥ 0 1 ⎦. 7. (2.5).
(19) 圖 2.3 磨輪磨削蝸桿齒面創成機構示意圖 8.
(20) M1,1f. ⎡ cos ϕ1 ⎢− sin ϕ 1 =⎢ ⎢ 0 ⎢ ⎣ 0. sin ϕ1 0 0⎤ cos ϕ1 0 0⎥⎥ 0 1 0⎥ ⎥ 0 0 1⎦. 亦即由磨輪座標系 Sc 轉換至蝸桿的座標系 S1 之齊次座標轉換矩陣可 表示如下:. M1,c. ⎡ cos ϕ1 ⎢− sin ϕ 1 =⎢ ⎢ 0 ⎢ ⎣ 0. sin ϕ1 cos λ − sin ϕ1 sin λ A1 cos ϕ1 ⎤ cos ϕ1 cos λ − cos ϕ1 sin λ − A1 sin ϕ1 ⎥⎥ sin λ cos λ − p1ϕ1 ⎥ ⎥ 0 0 1 ⎦. 將(2.3)式帶入(2.5)式即可求出磨輪刀具面表示於蝸桿座標系之軌跡 方程式如下﹔ ⎡X1 ⎤ ⎡ X c cos ϕ1 + Yc sin ϕ1 cos λ − Z c sin ϕ1 sin λ + A1 cos ϕ1 ⎤ ⎢ Y ⎥ ⎢− X sin ϕ + Y cos ϕ cos λ − Z cos ϕ sin λ − A sin ϕ ⎥ c 1 c 1 c 1 1 1⎥ R1 = ⎢ 1 ⎥ = ⎢ ⎢ Z1 ⎥ ⎢ ⎥ Yc sin λ + Z c cos λ − p1ϕ1 ⎢ ⎥ ⎢ ⎥ 1 ⎣1⎦ ⎣ ⎦. (2.6). 同理,利用向量之座標轉換可將 Sc 座標系上的齒面單位法向量 n c 表示 在蝸桿座標系 S1 如下: n1 = L1,fc L fc,c n c. 其中 L fc,c. 0 0 ⎤ ⎡1 ⎢ = ⎢0 cos λ − sin λ ⎥⎥ ⎢⎣0 sin λ cos λ ⎥⎦. L1,fc. ⎡ cos ϕ1 = ⎢⎢− sin ϕ1 ⎢⎣ 0. sin ϕ1 cos ϕ1 0. 0⎤ 0⎥⎥ 1⎥⎦. 因此,可求出磨輪之刀具面法向量表示在蝸桿座標系如下: ⎡n x1 ⎤ ⎡ n xc cos ϕ1 + n yc sin ϕ1 cos λ − n zc sin ϕ1 sin λ ⎤ ⎥ ⎢ n1 = ⎢⎢ n y1 ⎥⎥ = ⎢− n xc sin ϕ1 + n yc cos ϕ1 cos λ − n zc cos ϕ1 sin λ ⎥ ⎥ ⎢⎣ n z1 ⎥⎦ ⎢⎣ n yc sin λ + n zc cos λ ⎦. 9. (2.7).
(21) 磨輪在磨削蝸桿的過程中,磨輪和蝸桿在每一瞬間皆呈互相嚙合 之狀態,亦即兩齒面既不分離也不嵌入對方的齒面內。根據這個概念 可以了解,兩齒面的相對速度 Vc(1c) 必落於其共同的切平面,而共同法 向量又與切平面互相垂直,因此,相對速度與齒面法向量之內積(Dot Product)必為零。若將上述之關係用數學式子來表示,即是兩齒面之 嚙合方程式,此方程式表示於 Sc 座標係如下: n (c1c ) . V c(1c ) = 0. (2.8). 磨輪與蝸桿之相對速度可表示為: Vc (1c) = Vc (1) − Vc (c). (2.9). 在此假設磨輪為固定不動,即 Vc (c) = 0 ,而 Vc (1) 為蝸桿齒面速度表示 於 S c 座標系,由圖 2.3 可知 (c) (1) (c) ( tl) Vc (1) = ω (1) c × R c + ω c × O1O c + Vc. (2.10). Vc(t1) 代表線速度 Vf(c1) 由 Sfc 座標系轉換至 Sc 座標系,而 ω1 為蝸桿之旋轉. 角速度,ωc (1) 為蝸桿旋轉角速度表示在 Sc 座標系上。蝸桿與磨輪兩座 標系之原點位置向量 O1O c 可表示在 Sc 座標系如下: 0 0 ⎡1 ⎢0 cos λ sin λ O1O (cc) = ⎢ ⎢0 − sin λ cos λ ⎢ 0 0 ⎣0. 0⎤ A1 ⎤ ⎡ ⎥ ⎢ ⎥ 0⎥ ( fc ) ⎢ − p1ϕ1 sin λ ⎥ O1O c = ⎢− p1ϕ1 cos λ ⎥ 0⎥ ⎥ ⎢ ⎥ 1⎦ 1 ⎦ ⎣. (2.11). 又. ω. (1) c. = L c,fc ω. Vc(t1). (1) fc. = L c,fc Vf(c1). ⎡ 0 ⎤ =ω1 ⎢⎢ sin λ ⎥⎥ ⎢⎣cos λ ⎥⎦. (2.12). ⎡ 0 ⎤ =ω1 ⎢⎢ p1 sin λ ⎥⎥ ⎢⎣p1 cos λ ⎥⎦. (2.13). 其中 10.
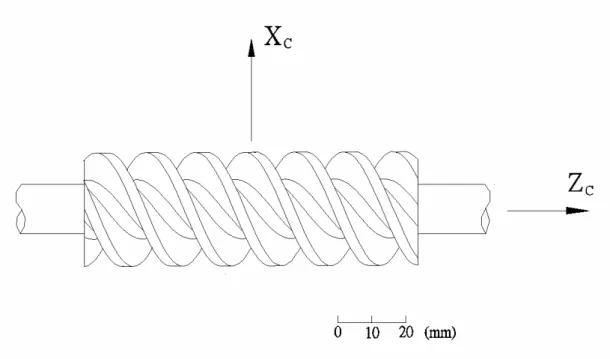
(22) L c,fc. 0 0 ⎤ ⎡1 ⎢ = ⎢0 cos λ sin λ ⎥⎥ ⎢⎣0 − sin λ cos λ ⎥⎦. 整理(2.3)、(2.11) 、(2.12) 和(2.13)各式並代入(2.10)式可得 Vc. (1). ⎡± (b1 − u 1 sin α1 ) sin λ − u 1 cos α1 sin θ cos λ ⎤ =ω1 ⎢⎢ u 1 cos α l cos θ cos λ + p1 sin λ + A1 cos λ ⎥⎥ ⎢⎣ − u 1 cos α l cos θ sin λ + p1 cos λ − A1 sin λ ⎥⎦. (2.14). 若將(2.4) 、(2.9) 和(2.14)三式整理後代入嚙合方程式(2.8)中,再經過 化簡後即可得到磨輪刀具面與蝸桿齒面之嚙合方程式如下,其刀具之 設計參數 u 1 可以用其它的參數來表示: u 1 = b1 sin α1 − (A1 − p1 cot λ ). cos α1 ± (A1 cot λ + p1 )sin α1 tan θ cos θ. (2.15). 2.3 ZK 型蝸桿之電腦繪圖 表 2.1 為本研究所探討之 ZK 型蝸桿之主要設計參數,茲將先前 所推導的蝸桿之齒面軌跡方程式和齒面的嚙合方程式聯立,用數值方 法求其齒面之解析解,加上電腦輔助繪圖軟體,即可繪出蝸桿之外 形,如圖 2.4 所示。 表 2.1 蝸桿與直邊磨輪之主要參數 名稱 代號 蝸桿旋向 T1 蝸桿齒數 α1 磨輪法向壓力角 λ 磨輪導程角 ma 磨輪軸向模數 rc 磨輪節圓半徑 rca 磨輪齒頂半徑 rcf 磨輪齒根半徑 r1 蝸桿節圓半徑 蝸桿單位角度之導程 p1 蝸桿與磨輪之中心距 A1. 關係式. = 蝸桿法向壓力角 = 蝸桿導程角 = 蝸桿軸向模數. 11. 數值 右旋 3 25° 30° 4.619 mm 20.0 mm 25.0 mm 14.0 mm 12.0 mm 6.928mm/rad 32.0 mm.
(23) 圖 2.4 ZK 型蝸桿之電腦繪圖. 12.
(24) 第三章. ZN 型蝸輪之數學模式. 3.1 前言 在蝸輪的製造上主要有兩種方式,一種是以飛刀切削,另一種是 用滾刀滾削。而這兩種切削方式均是模擬蝸桿與蝸輪之嚙合情形來切 製蝸輪齒面。一般而言,飛刀切削的優點是少量製造的成本低且齒形 精度高,但缺點是切削效率低。滾刀滾削的優點是切製效率高,適合 大量生產,目前工業上多以滾刀來滾削蝸輪。當以滾刀滾削蝸輪時, 滾刀的外型與蝸桿外型相同,蝸輪的齒面可以用一把與蝸桿外型相同 的滾刀滾削而成,因此,可根據滾刀與蝸輪的滾削機構和蝸桿型滾刀 的刀面方程式,進而推導出蝸輪之齒面方程式。在本章中,首先推導 直邊車刀之數學模式,然後利用座標轉換將車刀之軌跡方程式轉換至 ZN 型滾刀之刀面座標系上,便可以求得 ZN 型滾刀之刀面方程式。 接著依據 ZN 型滾刀滾削蝸輪之滾削方式建立 ZN 型蝸輪之滾削機 構,並且推導滾刀與被切削之蝸輪間的相對運動速度,再根據 ZN 型 蝸桿滾刀之刀面方程式與蝸輪之滾削機構,推導出 ZN 型蝸輪之齒面 數學模式。. 3.2 ZN 型滾刀之數學模式 圖 3.1(a)為本研究用以切削 ZN 型滾刀之車刀剖面示意圖,首先 定義此直邊車刀之刀面方程式,並表示在 Sl (X l , Yl , Z l ) 座標系如下: ⎡X l ⎤ ⎢Y ⎥ Rl = ⎢ l ⎥ = ⎢ Zl ⎥ ⎢ ⎥ ⎣1 ⎦. ⎡rt + l cos α 2 ⎤ ⎥ ⎢ 0 ⎥ ⎢ ⎢ ± l sin α 2 ⎥ ⎥ ⎢ 1 ⎦ ⎣. (3.1). 在此 l 為直邊刀具之刀面設計參數,其中 l min ≤ l ≤ l max 。如圖 3.1(a)所 示, α 2 為車刀之法向壓力角。在方程式(3.1)中,其 ± 符號之上方符號 13.
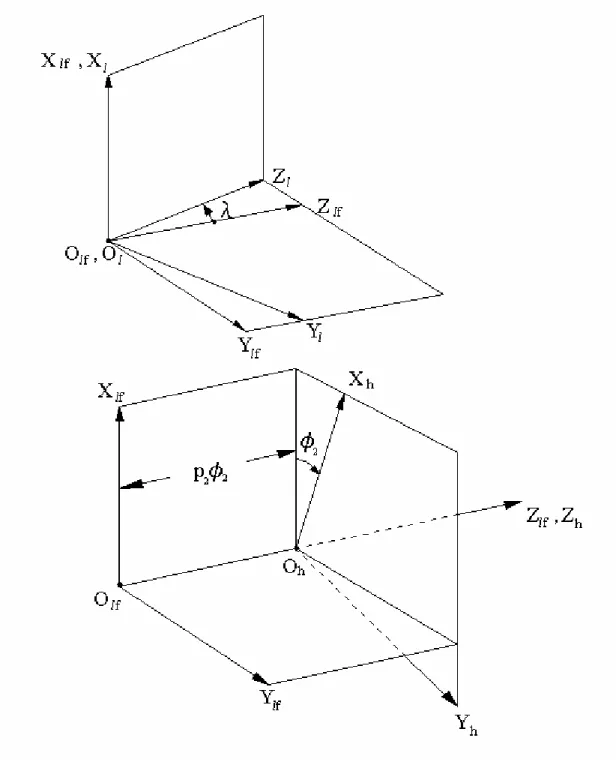
(25) 代表車刀之左邊刀具面,下方符號則代表車刀之右邊刀具面,以下有 關車刀和蝸桿之推導,上方符號皆代表由車刀左刀具面所創成蝸桿之 右齒面,下方符號則代表由車刀右刀具面所創成蝸桿之左齒面。圖 3.1(b)為車刀相對於蝸桿型滾刀之位置關係圖。由於 ZN 型滾刀刀面 是由一直邊刀具傾斜一角度所切削而成。因此,在推導 ZN 型蝸桿滾 刀之數學模式的過程中,僅需考慮刀具在滾刀座標係 S h (X h , Yh , Z h ) 之 軌跡方程式,即可求得 ZN 型滾刀之刀面方程式。 如圖 3.2 所示,ZN 型滾刀之切削機構可由滾刀座標系 S h (X h , Yh , Z h ) 與車刀座標系 Sl (X l , Yl , Z l ) 之相對運動關係來模擬。蝸桿型滾刀座標系 S h ( X h , Yh , Z h ) 之 Z h 軸與車刀法向外形 Sl (X l , Yl , Z l ) 座標系之 Z l 軸夾一. 導程角 λ ,座標系 Slf (X lf , Ylf , Z lf ) 為參考座標系,若將車刀之法向外形 相對於 Z lf 軸做螺旋運動,即可利用軌跡法求得 ZN 型蝸桿滾刀之齒 面數學模式。其座標轉換如下所示: (3.2). R h = M h ,lf M lf ,l R l = M h ,l R l. 其中. M lf ,l. 0 0 ⎡1 ⎢0 cos λ − sin λ =⎢ ⎢0 sin λ cos λ ⎢ 0 0 ⎣0. 0⎤ 0⎥⎥ 0⎥ ⎥ 1⎦. M h ,lf. ⎡ cos ϕ 2 ⎢− sin ϕ 2 =⎢ ⎢ 0 ⎢ ⎣ 0. 0 0 ⎤ 0 0 ⎥⎥ 1 − P2 ϕ 2 ⎥ ⎥ 0 1 ⎦. sin ϕ 2 cos ϕ 2 0 0. 所以 M h ,l = M h ,lf M lf ,l ⎡ cos ϕ 2 ⎢− sin ϕ 2 =⎢ ⎢ 0 ⎢ ⎣ 0. sin ϕ 2 cos λ − sin ϕ 2 sin λ 0 ⎤ cos ϕ 2 cos λ − cos ϕ 2 sin λ 0 ⎥⎥ sin λ cos λ − P2 ϕ 2 ⎥ ⎥ 0 0 1 ⎦. 14.
(26) 圖 3.1 直邊車刀之法向剖面與位置關係圖 15.
(27) 圖 3.2 蝸桿型滾刀之成形機構示意圖. 16.
(28) 經過整理可求得 ZN 型蝸桿滾刀之齒面方程式表示在 S h 座標系如下: ⎡X h ⎤ ⎢Y ⎥ Rh = ⎢ h ⎥ = ⎢ Zh ⎥ ⎢ ⎥ ⎣1 ⎦. ⎡ (rt + l cos α 2 ) cos ϕ 2 m l sin α 2 sin ϕ 2 sin λ ⎤ ⎢− (rt + l cos α ) sin ϕ m l sin α cos ϕ sin λ ⎥ 2 2 2 2 ⎥ ⎢ ⎥ ⎢ ± l sin α 2 cos λ − P2 ϕ 2 ⎥ ⎢ 1 ⎦ ⎣. (3.3). 由於蝸桿型滾刀之齒面為一規則曲面,因此,可對滾刀之兩個齒面參 數之偏微分做外積(Cross Product),求其齒面之法向量,其表示如下: Nh =. ∂R h ∂R h × ∂l ∂ϕ 2. (3.4). 將(3.1)式代入(3.3)式,再分別對 l 與 ϕ 2 進行偏微分可得到下面兩式: ⎡ cos α 2 cos ϕ 2 m sin α 2 sin ϕ 2 sin λ ⎤ ∂R h ⎢ = ⎢− cos α 2 sin ϕ 2 m sin α 2 cos ϕ 2 sin λ ⎥⎥ ∂l ⎢⎣ ⎥⎦ ± sin α 2 cos λ. (3.5). ⎡− (rt + l cos α 2 ) sin ϕ 2 m l sin α 2 cos ϕ 2 sin λ ⎤ ∂R h ⎢ = ⎢ − (rt + l cos α 2 ) cos ϕ 2 ± l sin α 2 sin ϕ 2 sin λ ⎥⎥ ∂ϕ 2 ⎢⎣ ⎥⎦ − P2. (3.6). 將(3.5)和(3.6)式代入(3.4)式,即可求得 ZN 型蝸桿滾刀之齒面法向量 如下表示: ⎡ N xh ⎤ ⎡ A Nh sin ϕ 2 − B Nh cos ϕ 2 ⎤ ⎢ ⎥ N h = ⎢ N yh ⎥ = ⎢⎢B Nh sin ϕ 2 + A Nh cos ϕ 2 ⎥⎥ ⎢N ⎥ ⎢ ⎥⎦ C Nh ⎣ zh ⎦ ⎣. 其中 A Nh = P2 cos α 2 − l sin 2 α 2 sin λ cos λ B Nh = m ((rt + l cos α 2 ) sin α 2 cos λ + P2 sin α 2 sin λ ) C Nh = − rt cos α 2 − l sin 2 α 2 sin 2 λ − l cos 2 α 2. 17. (3.7).
(29) 3.3 ZN 型蝸輪之數學模式 至此已求得 ZN 型蝸桿滾刀之齒面方程式 R h 和法向量 N h 。ZN 型滾刀滾切蝸輪之滾削機構,如圖 3.3 所示,座標系 S 2 (X 2 , Y2 , Z 2 ) 與 S h ( X h , Yh , Z h ) 分別為固聯在蝸輪與蝸桿型滾刀之座標系,而座標系. Sg (X g , Yg , Z g ) 和 So (X o , Yo , Z o ) 則分別為蝸輪與蝸桿型滾刀之參考座標. 系, Zg 軸為蝸輪之旋轉軸, Zo 軸為蝸桿型滾刀之旋轉軸,γ為蝸輪 旋轉軸與蝸桿型滾刀之旋轉軸所夾之交錯角(Crossed Angle), A 2 為此 兩旋轉軸之最短距離。如圖 3.3(a)所示,固聯於 S 2 (X 2 , Y2 , Z 2 ) 座標系之 蝸輪,相對於其參考座標系 Sg (X g , Yg , Zg ) 是沿著 Z 2 旋轉軸方向以 φ 2 之 角度作左旋(順時鐘)方向旋轉;如圖 3.3(b)所示,固聯於 S h (X h , Yh , Z h ) 座標系之 ZN 型蝸桿滾刀,相對於其參考座標系 So (X o , Yo , Z o ) 是沿著 Z o 軸方向以 φ1 之角度作右旋(反時鐘)方向旋轉。依據圖 3.3 所示滾刀. 與蝸輪之座標系,配合圖 3.4 之蝸輪滾削時蝸桿與蝸輪之關係示意 圖,即可將蝸桿型滾刀之齒面方程式以下列之齊次座標轉換矩陣轉換 至 S 2 (X 2 , Y2 , Z 2 ) 座標系如下: R 2 ( u 2,ϕ 2 , φ1 ) = M 2,g M g,o M o,h R h ( u 2 ,ϕ 2 ). (3.8). = M 2,h R h ( u 2 ,ϕ 2 ). 其中. M o,h. ⎡cos φ1 ⎢ sin φ 1 =⎢ ⎢ 0 ⎢ ⎣ 0. − sin φ1 0 0⎤ cos φ1 0 0⎥⎥ 0 1 0⎥ ⎥ 0 0 1⎦. M g ,o. 0 0 − A2 ⎤ ⎡1 ⎢0 cos γ − sin γ 0 ⎥⎥ ⎢ = ⎢0 sin γ cos γ 0 ⎥ ⎢ ⎥ 0 0 1 ⎦ ⎣0 18.
(30) 圖3.3 蝸桿滾削蝸輪之滾削機構示意圖. 19.
(31) 圖 3.4 蝸桿滾削蝸輪之滾削機構示意圖(續). 20.
(32) 及 M 2 ,g. ⎡cos φ 2 ⎢ sin φ 2 =⎢ ⎢ 0 ⎢ ⎣ 0. − sin φ 2 cos φ 2 0 0. 0 0 1 0. 0⎤ 0⎥⎥ 0⎥ ⎥ 1⎦. 得 M2,h = M 2,g M g,o M o,h a12 sin φ 2 sin γ − A 2 cosφ 2 ⎤ ⎡ a11 ⎢ a a 22 − cosφ 2 sin γ − A 2 sin φ 2 ⎥⎥ 21 ⎢ = ⎢sin γ sin φ1 sin γ cosφ1 ⎥ cos γ 0 ⎢ ⎥ 0 0 0 1 ⎣ ⎦. 其中 a11 = −sin φ 2 cos γ sin φ1 + cosφ 2 cosφ1 a12 = −sin φ 2 cos γ cosφ1 − cosφ 2 sin φ1 a 21 = cosφ 2 cos γ sin φ1 + sin φ 2 sin φ1 a 22 = cosφ 2 cos γ cosφ1 − sin φ 2 sin φ1. 依據圖 3.4 可知,蝸桿型滾刀旋轉軸與蝸輪旋轉軸之間的最短距離可 由下式表示之: (3.9). A 2 = rh + r2. rh 和 r2 分別為 ZN 型滾刀與 ZN 型蝸輪之節圓半徑。由於在切削蝸輪 之過程中,蝸輪與滾刀為共軛運動對,因此,滾刀與蝸輪之旋轉角 φ1 和 φ 2 必滿足下列之關係式: φ 2 = m 2h =. ω2 ωh. =. Th φ1 T2. (3.10). 其中 Th 和 T2 分別為蝸桿型滾刀之齒數與蝸輪之齒數,而ωh 和ω2 則 分別為蝸輪切削之過程中,蝸桿型滾刀與蝸輪之轉速。將(3.3)式代入 (3.8)式即可求得 ZN 型蝸輪之齒面方程式:. 21.
(33) ⎡ a 11X h + a 12 Yh + sin γ sin φ 2 Z h − A 2 cos φ 2 ⎤ ⎢a X + a Y − sin γ cos φ Z − A sin φ ⎥ 22 h 2 h 2 2⎥ R 2 ( u 2,ϕ 2 , φ1 ) = ⎢ 21 h ⎢ sin γ sin φ1X h + sin γ cos φ1Yh + cos γZ h ⎥ ⎢ ⎥ 1 ⎣ ⎦. (3.11). 其中 X h 、 Yh 和 Z h 分別表示於(3.3)式中。 因為 ZN 型蝸輪之齒面是由 ZN 型滾刀之刀具面所創成,因此, 利用下列之齊次座標轉換矩陣方程式亦可將滾刀刀具之法向量轉換 至蝸輪之座標系 S 2 : N 2 ( u 2 ,ϕ 2 ,φ1 ) = L 2,g L g,o L o,h N h ( u 2,ϕ 2 ). (3.12). = L 2,h N h ( u 2 ,ϕ 2 ). 其中 L o,h. ⎡cos φ1 = ⎢⎢ sin φ1 ⎢⎣ 0. − sin φ1 cos φ1 0. L g ,o. 0 0 ⎤ ⎡1 ⎢ = ⎢0 cos γ − sin γ ⎥⎥ ⎢⎣0 sin γ cos γ ⎥⎦. L 2 ,g. ⎡cos φ 2 = ⎢⎢ sin φ 2 ⎢⎣ 0. − sin φ 2 cos φ 2 0. 0⎤ 0⎥⎥ 1⎥⎦. 0⎤ 0⎥⎥ 1⎥⎦. 將(3.7)式代入(3.12)式,可求得 ZN 型蝸輪之齒面法向量如下: ⎤ a11N xh + a12 N yh + sin γ sin φ 2 N zh ⎡N x2 ⎤ ⎡ ⎥ ⎢ ⎢ ⎥ a 21N xh + a 22 N yh − sin γ cos φ 2 N zh N 2 = ⎢ N y2 ⎥ = ⎢ ⎥ ⎢ ⎢⎣ N z 2 ⎥⎦ ⎣sin γ sin φ1 N xh + sin γ cos φ1N yh + cos γN zh ⎥⎦. (3.13). 3.4 ZN 型蝸輪與滾刀之嚙合方程式 要求得蝸輪與滾刀的嚙合方程式,必須將滾刀刀具面和蝸輪齒面 速度及滾刀之刀具面法向量全部表示在同一座標系,如 S h 座標系,所 以必須經過下列之齊次座標轉換矩陣: 22.
(34) (3.14). M h ,g = M h ,o M o ,g. 其中. M h ,o. ⎡ cos φ1 sin φ1 ⎢− sin φ cos φ 1 1 =⎢ ⎢ 0 0 ⎢ 0 ⎣ 0. M o ,g. 0 0 A2 ⎤ ⎡1 ⎢0 cos γ sin γ 0 ⎥ ⎥ =⎢ ⎢0 − sin γ cos γ 0 ⎥ ⎥ ⎢ 0 0 1 ⎦ ⎣0. 0 0 1 0. 0⎤ 0⎥⎥ 0⎥ ⎥ 1⎦. ⎡ cos φ1 sin φ1 cos γ sin φ1 sin γ A 2 cos φ1 ⎤ ⎢− sin φ cos φ cos γ cos φ sin γ − A sin φ ⎥ 1 1 1 2 1⎥ =⎢ ⎥ ⎢ 0 cos γ 0 − sin γ ⎥ ⎢ 0 0 1 ⎦ ⎣ 0. 則 M h ,g. (3.15). 同理,向量之座標轉換矩陣如下: L h ,g. ⎡ cos φ1 = ⎢⎢− sin φ1 ⎢⎣ 0. sin φ1 cos γ. sin φ1 sin γ ⎤ cos φ1 cos γ cos φ1 sin γ ⎥⎥ − sin γ cos γ ⎥⎦. (3.16). 蝸輪之旋轉角速度可表示在 Sg (X g , Yg , Zg ) 座標系如下:. ω. ⎡ 0 ⎤ k g = -ω2 k g = ⎢⎢ 0 ⎥⎥ dt ⎢⎣−ω2 ⎥⎦. (g) dφ 2 2 =. (3.17). 將(3.17)式之蝸輪旋轉角速度經過座標轉換可表示在 S h (X h , Yh , Z h ) 座 標系如下:. ω. (h) 2. = L h ,g ω. (g) 2. ⎡ − sin φ1 sin γ ⎤ ⎡ − m 2 h sin φ1 sin γ ⎤ ⎥ ⎢ =ω2 ⎢− cos φ1 sin γ ⎥ =ωh ⎢⎢− m 2 h cos φ1 sin γ ⎥⎥ ⎢⎣ − cos γ ⎥⎦ ⎢⎣ − m 2 h cos γ ⎥⎦. (3.18). 同理,滾刀之旋轉角速度 ω h 表示在 Sh (X h , Yh , Z h ) 座標系為:. ω. (h ) h. ⎡ 0 ⎤ dφ1 k h = ωh k h = ⎢⎢ 0 ⎥⎥ = dt ⎢⎣ωh ⎦⎥. (3.19). 23.
(35) 滾刀與蝸輪兩者之中心距位置向量 O h O 2 表示於 So 座標系為: O h O (2o). ⎡A 2 ⎤ = A 2 i o = ⎢⎢ 0 ⎥⎥ ⎢⎣ 0 ⎥⎦. (3.20). 利用(3.14)式所示之齊次座標轉換矩陣,可以把中心距位置向量表示 在 S h (X h , Yh , Z h ) 座標系如下: O h O (2h ) = L h ,o O h O (2o). ⎡ cos φ1 = ⎢⎢− sin φ1 ⎢⎣ 0. sin φ1 cos φ1 0. 0⎤ ⎡A 2 ⎤ ⎡ A 2 cos φ1 ⎤ 0⎥⎥ ⎢⎢ 0 ⎥⎥ = ⎢⎢− A 2 sin φ1 ⎥⎥ ⎥⎦ 1⎥⎦ ⎢⎣ 0 ⎥⎦ ⎢⎣ 0. (3.21). 因此,蝸桿型滾刀與蝸輪工件之相對速度表示在 S h (X h , Yh , Z h ) 座標系 可由下式求得: Vh( h2) = ( ω(hh ). − ω(2h ) ) ×. Rh. − O h O 2 ( h ) × ω(2h ). (3.22). 將(3.3)、(3.18)、(3.19)和(3.21)式代入(3.22)式,即可求得蝸桿型滾刀 與蝸輪之相對速度表示於 S h 座標系如下: Vh( h2). ⎡ (m 2h cos φ1 sin γ ) Z h − (1 + m 2h cos γ )Yh − A 2 m 2h sin φ1 cos γ ⎤ =ωh ⎢⎢(1 + m 2h cos γ )X h − (m 2h sin φ1 sin γ ) Z h − A 2 m 2h cos φ1 cos γ ⎥⎥ ⎢⎣ (m 2h sin φ1 sin γ )Yh − (m 2h cos φ1 sin γ )X h + A 2 m 2h sin γ ⎥⎦. (3.23) 根據嚙合條件式,將方程式(3.7)式與(3.23)式做內積,即可求得蝸桿 型滾刀刀具面與蝸輪工件齒面的嚙合方程式如下: N (hh ) ‧Vh( h2) = 0. (3.24). 因為蝸輪之齒面是由蝸桿型滾刀所創成,因此,ZN 型蝸輪之齒面的 數學模式可由 ZN 型蝸桿滾刀在 S 2 (X 2 , Y2 , Z 2 ) 座標系之軌跡方程式 (3.11)式,與上述之嚙合方程式(3.24)式聯立組成。. 24.
(36) 3.5 蝸輪之電腦繪圖 表 3.1 為本研究所探討之 ZN 型蝸桿滾刀與所創成之 ZN 型蝸輪 的主要設計參數,依據本章所推導 ZN 型蝸輪之齒面軌跡方程式(3.11) 式和蝸輪與蝸桿之齒面嚙合方程式(3.24)式,即可利用數值解之方法 求得其齒面之解析解,然後再配合電腦繪圖的方法即可繪出 ZN 型蝸 輪之外形。。 表 3.1. 蝸輪與蝸桿型滾刀之主要參數. 名稱 代號 關係式 數值 滾刀旋轉方向 右旋 蝸輪旋轉方向 左旋 γ 蝸桿蝸輪組之交錯角 45° β 15° 蝸輪之螺旋角 r2 60.045 mm 蝸輪之節圓半徑 50 mm 蝸輪之齒面寬 A 2 = r2 + rc 72.045 mm 中心距 T2 29 蝸輪齒數 Th 3 滾刀齒數 α2 滾刀法向壓力角 20° λ = ZK 型蝸桿導程角 滾刀導程角 30° 滾刀法向模數 m = ZK 型蝸桿法向模數 4.0 mm/齒 rl = ZK 型蝸桿節圓半徑 12.0 mm 滾刀節圓半徑 6.0 mm l min 滾刀工作直邊最小值 13.5 mm l max 滾刀工作直邊最大值 3.373 mm rt 直邊刀具面之外型參數 Sn 6.283 mm 滾刀法向齒寬 p 6.928mm/rad 滾刀單位角度之導程. 25.
(37) 圖 3.5 ZN 型蝸輪之電腦繪圖. 26.
(38) 第四章 蝸桿蝸輪之接觸分析 4.1 前言 齒輪組是常見的機械傳動元件,其設計與製造上的誤差均會影響 齒輪組整體之傳動性能。一般常見的誤差有單一齒形誤差、連續累積 齒形誤差、導程角誤差、壓力角誤差、齒厚誤差和接觸比誤差等等。 因此,如何提高齒輪設計與製造上的精度便成為相當重要的問題。除 了齒形精度,若齒輪組在裝配過程中,產生中心距偏差、水平軸向偏 差和垂直軸向偏差亦會影響到其傳動性能。若利用電腦模擬先分析並 設計出齒輪組最佳的傳動條件,則可大量節省重複試驗所花費的製造 與檢驗費用。根據 Litvin[7][8]提出的齒輪接觸分析(Tooth Contact Analysis)方法,利用模擬齒輪滾削機構所推導的理想齒輪齒面數學模 式,即可進一步來模擬齒輪組在傳動時所產生的運動誤差(Kinematic Error)。 在本章中,首先依據蝸桿蝸輪組之嚙合機構,建立其嚙合之數學 模式並模擬其接觸情形,假設在各種裝配狀況下,計算出蝸桿蝸輪組 的運動誤差、瞬間接觸齒數、平均接觸比及接觸比。平均接觸比定義 為齒輪組在滿足嚙合條件下,其嚙合齒面接觸點軌跡上所有瞬間接觸 齒數之總合除以所選取之計算嚙合點的總點數。. 4.2 蝸桿蝸輪之齒面接觸模擬 在進行蝸桿蝸輪組之齒面接觸分析時,必須先將蝸桿與蝸輪之齒 面數學模式和齒面之單位法向量,利用座標轉換至共同的參考座標 系,如 Sf (X f , Yf , Z f ) 座標系。如圖 4.1 為蝸桿蝸輪組之嚙合機構示意 圖,座標系 S1 (X1 , Y1 , Z1 ) 與座標系 S 2 (X 2 , Y2 , Z 2 ) 分別固聯於 ZK 型蝸桿 齒面與 ZN 型蝸輪齒面上,其中, Z1 軸為 ZK 型蝸桿之旋轉軸, Z 2 軸. 27.
(39) 為 ZN 型蝸輪之旋轉軸。座標系 Sf (X f , Yf , Z f ) 為蝸桿蝸輪組之固定參 考座標系,座標系 Sfv (X fv , Yfv , Z fv ) 和座標系 S fw (X fw , Yfw , Z fw ) 分別為模 擬蝸輪具有垂直與水平軸向裝配誤差時之參考座標系。參數 γ 為蝸桿 與蝸輪嚙合時之交錯角, A 為蝸桿蝸輪組之中心距,其中 ∆γ h 、 ∆γ v 和 ∆A 分別為蝸桿蝸輪組之水平軸向裝配誤差、垂直軸向裝配誤差與中. 心距裝配誤差。利用下列之齊次座標轉換矩陣及向量轉換矩陣,可將 ZK 型蝸桿齒面方程式 R1 與齒面單位法向量 n1 轉換至固定參考座標系 Sf 如下:. R (f1) = M f ,1 R 1 ⎡cos φ1′ ⎢ sin φ′ 1 =⎢ ⎢ 0 ⎢ ⎣ 0. − sin φ1′ 0 0⎤ ⎡X1 cos φ1′ − Y1 sin φ1′ ⎤ ⎢X sin φ′ + Y cos φ′ ⎥ ⎥ cos φ1′ 0 0⎥ 1 1 1⎥ R1 = ⎢ 1 ⎢ ⎥ 0 1 0⎥ Z1 ⎢ ⎥ ⎥ 0 0 1⎦ 1 ⎣ ⎦. (4.1). 及 n (f1) = L f ,1 n1 ⎡cos φ1′ = ⎢⎢ sin φ1′ ⎢⎣ 0. − sin φ1′ cos φ1′ 0. 0⎤ ⎡ n x1 cos φ1′ − n y1 sin φ1′ ⎤ ⎥ 0⎥ n1 = ⎢⎢n x1 cos φ1′ + n y1 sin φ1′ ⎥⎥ ⎥⎦ ⎢⎣ n z1 1⎥⎦. (4.2). 其中, R 1 與 n1 均已分別表示第二章之(2.6)式和(2.7)式。 同理,ZN 型蝸輪也可經由齊次座標轉換矩陣及向量轉換矩陣,將其 齒面方程式 R 2 和齒面法向量 N 2 轉換至固定參考座標系 Sf 如下: R (f 2) = M f ,f 2 M f 2,fw M fw ,fv Mfv,2 R 2 = M f , 2 R 2. 其中. M f ,f 2. ⎡1 ⎢0 =⎢ ⎢0 ⎢ ⎣0. 0 1 0 0. 0 ∆A ⎤ 0 0 ⎥⎥ , 1 0 ⎥ ⎥ 0 1 ⎦ 28. (4.3).
(40) 圖 4.1 蝸桿蝸輪組之嚙合機構示意圖. 29.
(41) M f 2,fw. 0 0 ⎡1 ⎢0 cos( γ + ∆γ ) sin( γ + ∆γ ) h h =⎢ ⎢0 − sin( γ + ∆γ h ) cos( γ + ∆γ h ) ⎢ 0 0 ⎣0. M fw ,fv. ⎡cos ∆γ v ⎢ 0 =⎢ ⎢ sin ∆γ v ⎢ ⎣ 0. ⎡ cos φ′2 ⎢− sin φ′ 2 =⎢ ⎢ 0 ⎢ ⎣ 0. M fv, 2. 0 − sin ∆γ v 1 0 0 cos ∆γ v 0 0 sin φ′2 cos φ′2 0 0. 0 0 1 0. 0⎤ 0⎥⎥ , 0⎥ ⎥ 1⎦. 0⎤ 0⎥⎥ , 0⎥ ⎥ 1⎦. 0⎤ 0⎥⎥ , 0⎥ ⎥ 1⎦. 整理之後,可得:. M f ,2. ⎡cos ∆γ v cos φ′2 ⎢ b 21 =⎢ ⎢ b 31 ⎢ 0 ⎣. cos ∆γ v sin φ′2 b 22 b 32 0. − sin ∆γ v sin( γ + ∆γ h ) cos ∆γ v cos( γ + ∆γ h ) cos ∆γ v 0. A + ∆A ⎤ 0 ⎥⎥ 0 ⎥ ⎥ 1 ⎦. 將方程式(3.11)代入方程式(4.3),即可求得 ZN 型蝸輪齒面方程式 R 2 表示在 Sf 座標系如下:. R (f 2). ⎡X 2 cos ∆γ v cos φ′2 + Y2 cos ∆γ v sin φ′2 − Z 2 sin ∆γ v + (A + ∆A)⎤ ⎢ ⎥ b 21X 2 + b 22 Y2 + Z 2 sin( γ + ∆γ h ) cos ∆γ v ⎢ ⎥ = ⎢ ⎥ b 31X 2 + b 32 Y2 + Z 2 cos( γ + ∆γ h ) cos ∆γ v ⎢ ⎥ 1 ⎣ ⎦. (4.4). 其中 R 2 已表示在第三章的(3.11)式中。. 對於 ZN 型蝸輪齒面之法向量而言,亦可經由向量之座標轉換至 S f 座 標系如下: N (f 2) = L f ,f 2 L f 2,fw L fw ,fv L fv,2 N 2 = L f , 2 N 2. (4.5). 參考前面之轉換矩陣,可得向量轉換矩陣 L f ,f 2、L f 2,fw、L fw ,fv 和 L fv,2 , 整理之後,可得向量轉換矩陣 L f ,2 ,表示如下:. 30.
(42) L f ,2. ⎡cos ∆γ v cos φ′2 = ⎢⎢ b 21 ⎢⎣ b 31. cos ∆γ v sin φ′2 b 22 b 32. − sin ∆γ v. ⎤ sin( γ + ∆γ h ) cos ∆γ v ⎥⎥ cos( γ + ∆γ h ) cos ∆γ v ⎥⎦. (4.6). 將(4.6)式代入(4.5)式,即可求得 ZN 型蝸輪齒面之法向量 N 2 表示於 Sf 座標系如下: N (f 2). ⎡ N x 2 cos ∆γ v cos φ′2 + N y 2 cos ∆γ v sin φ′2 − N z 2 sin ∆γ v ⎤ ⎥ ⎢ b 21 N x 2 + b 22 N y 2 + N z 2 sin( γ + ∆γ h ) cos ∆γ v =⎢ ⎥ ⎥ ⎢ b 31 N x 2 + b 32 N y 2 + N z 2 cos( γ + ∆γ h ) cos ∆γ v ⎦ ⎣. (4.7). 其中 N 2 亦已表示在第三章的(3.13)式中,其中 b 21 = sin( γ + ∆γ h ) sin ∆γ v cos φ′2 − cos( γ + ∆γ h ) sin φ′2 b 22 = sin( γ + ∆γ h ) sin ∆γ v sin φ′2 + cos( γ + ∆γ h ) cos φ′2 b 31 = cos( γ + ∆γ h ) sin ∆γ v cos φ′2 + sin( γ + ∆γ h ) sin φ′2 b 32 = cos(γ + ∆γ h ) sin ∆γ v sin φ′2 − sin( γ + ∆γ h ) cos φ′2. 4.3 運動誤差、接觸齒數與接觸比 當蝸桿蝸輪組在嚙合時,由於接觸之兩嚙合齒面需滿足相切之條 件,亦即在嚙合齒面之接觸點位置,蝸桿與蝸輪之齒面位置向量及單 位法向量必須相同,因此可以下列方程式表示之: R (f1) − R (f 2) = 0. (4.8). n (f1) ×n (f 2) = 0. (4.9). 方程式(4.8)表示 ZK 型蝸桿與 ZN 型蝸輪之齒面在其共同接觸點的位 置向量相同,而此條件可以分為 X 、 Y 和 Z 軸三個方向的分量相等, 因此,(4.8)式可以引導出三個獨立方程式。方程式(4.9)表示 ZK 型蝸 桿與 ZN 型蝸輪之齒面在共同接觸點之單位法向量共線,亦即兩單位 法向量之外積等於零,因為單位法向量的長度為 1( n (f1) = n (f 2) = 1 ),所 以(4.9)式可以引導出兩個獨立方程式。在利用磨輪創成 ZK 型蝸桿以 及使用 ZN 型蝸桿滾刀創成 ZN 型蝸輪時,會有兩個獨立的嚙合方程. 31.
(43) 式存在,所以在進行蝸桿蝸輪組之齒面接觸分析時,共有七個獨立方 程式來求解八個未知數: u 1 、 θ 、 ϕ1 、 l 、 ϕ 2 、 φ1 、 φ1′ 和 φ ′2 。其中 θ 與 ϕ1 表示磨輪創成 ZK 型蝸桿時磨輪之齒面設計參數; l 、 ϕ 2 與 φ1 則表. 示 ZN 型蝸桿滾刀在創成 ZN 型蝸輪時,滾刀之刀面參數與創成機構 之運動參數。利用磨輪與蝸桿之嚙合方程式,可將參數 u 1 表示為 θ 的 顯函數,而依據滾刀與蝸輪之嚙合方程式,則 l 、 ϕ 2 與 φ1 可表示為隱 函數型式,參數 φ1′ 為蝸桿蝸輪組在齒輪接觸分析時蝸桿之旋轉角,參 數 φ ′2 則為蝸輪在齒輪接觸分析時隨蝸桿轉動 φ1′ 時蝸輪之旋轉角。一般 而言,蝸桿蝸輪組以蝸桿為主動件而蝸輪為被動件,因此,若將蝸桿 旋轉角 φ1′ 設為已知,則蝸桿蝸輪組之齒面接觸分析模擬即成為七個獨 立方程式來求解七個未知數,而此七個非線性方程式可使用數值分析 法來求解七個未知數。在求得蝸桿蝸輪組之接觸點及其運動參數後, 蝸桿蝸輪組嚙合時的運動誤差可由下式求得: ∆φ 2 = (φ 2 − φ′2 ) −. T1 (φ1 − φ1′ ) T2. (4.10). 其中 T1 和 T2 分別為 ZK 型蝸桿與 ZN 型蝸輪之齒數, φ1′ 與 φ ′2 則分別為 ZK 型蝸桿和 ZN 型蝸輪在嚙合時之旋轉角度。此外, φ1 和 φ 2 的關係 必須滿足方程式(3.10)。 齒輪組之接觸比一般定義為嚙合齒輪組之齒面從開始接觸至最 後離開接觸相對於齒輪中心所含括的作用角,除以相鄰兩齒相對應點 的夾角。然而齒輪組實際之嚙合接觸比則不容易求得,一般而言,正 齒輪、螺旋齒輪、蝸線傘齒輪和戟齒輪的瞬時接觸齒數不是一齒就是 兩齒,也有利用齒輪接觸分析所獲得之運動誤差曲線來推算齒輪組之 瞬時接觸齒數;在嚙合時若有兩個運動誤差曲線所包圍,此時瞬時接 觸齒數為二,否則即為一齒。蝸桿蝸輪組瞬時接觸齒數為三或四齒, 則無法依據運動誤差曲線來判斷蝸桿蝸輪組之瞬時接觸齒數。因此, 32.
(44) 利用齒面接觸分析,計算蝸桿蝸輪組開始發生接觸到結束接觸時,蝸 桿所經歷的旋轉角度,除以蝸桿旋轉一圈的角度(即 360°),再除以蝸 桿的齒數,即可求得蝸桿蝸輪組之接觸比。利用齒輪接觸分析可以計 算求得瞬時接觸齒數,為了使齒輪組之平均接觸比能真正反映在嚙合 過程中,蝸桿蝸輪組瞬時接觸齒數的變化,可以定義平均接觸比為在 齒輪組之接觸點軌跡上各接觸取樣點(Sampling Points),從開始接觸 點瞬時之接觸齒數至最後接觸點之瞬時接觸齒數的總合,除以蝸桿蝸 輪組嚙合傳動一循環時,自開始接觸點至最後接觸點的總取樣接觸點 數。. 4.4 範例 表 4.1 所示為嚙合之蝸桿蝸輪組之主要設計參數,根據先前所推 導的數學模式與兩嚙合方程式,配合本論文所發展之齒面接觸分析程 式,即可分析蝸桿蝸輪組之接觸情形。本節主要分為兩個部分,第一 部份是理想裝配狀況下的接觸情形,第二部分則是考慮具有裝配誤差 下的接觸情形。茲舉兩個例子,以說明蝸桿蝸輪組在不同齒形參數與 各種裝配條件下,運動誤差、瞬時接觸齒數、平均接觸比和接觸比的 變化情形。 表 4.1 蝸桿蝸輪組之主要設計參數. 法向模數 m(mm/齒) 齒數 法向壓力角. 蝸桿 1. 蝸桿 2. 蝸輪 1. 蝸輪 2. 蝸輪 3. 4.0. 4.0. 4.0. 4.0. 4.0. 3. 3. 29. 29. 29. 20°. 22.5°. 20°. 20°. 20°. 30°. 45°. 60°. 與蝸桿之交錯角 γ. 33.
(45) 範例一: 以 ZK 型蝸桿和 ZN 型蝸輪進行齒輪組之嚙合測試,蝸桿之法向 壓力角分別為 20°與 22.5°,蝸輪之法向壓力角為 20°,假設在理想裝 配條件下,探討蝸桿蝸輪組在 30°、45°和 60°之交錯角的運動誤差、 瞬時接觸齒數、平均接觸比和接觸比。 依據本章所推導並發展之電腦輔助齒輪接觸分析模擬,各蝸桿蝸 輪之搭配組合的齒輪組在理想裝配條件下之接觸情形如表(4.2)至(4.7) 所示。在沒有裝配誤差下,蝸桿蝸輪組之運動誤差(K.E.)皆為零,其 運動誤差及接觸齒數如圖(4.2)至(4.7)所示。本研究係探討非 90°交錯 角之蝸桿蝸輪組嚙合,由分析之結果顯示,蝸桿蝸輪組在 60°交錯角 以內,,其平均接觸比與接觸比隨著交錯角之增大而變大。. 範例二: 以 ZK 型蝸桿和 ZN 型蝸輪進行齒輪組之嚙合測試,其中蝸桿之 法向壓力角為 22.5°,而蝸輪之法向壓力角則為 20°。假設蝸桿蝸輪 組具有中心距之裝配誤差及水平和垂直軸向之裝配誤差,來探討蝸桿 蝸輪組在 45°交錯角之下的運動誤差、瞬時接觸齒數、平均接觸比、 與接觸比。 依據本章所發展之電腦輔助齒輪接觸分析模擬,蝸桿蝸輪組之接 觸情形如表(4.8)至表(4.19)所示,由分析之結果顯示,齒輪組在有裝 配誤差狀況下,會有運動誤差產生。圖(4.8)至圖(4.19)則表示蝸桿蝸 輪組在具有裝配誤差下進行嚙合傳動時,其接觸齒數和運動誤差的情 形。其運動誤差值會隨著不同的裝配誤差組合而改變。表 4.20 為蝸 桿蝸輪組之裝配條件與運動誤差值之關係表,由結果可知,運動誤差 值隨著交錯角之增加而越來越大。並且,當蝸桿蝸輪組之交錯角越來. 34.
(46) 表 4.2 理想裝配條件下蝸桿 1 與蝸輪 1 之接觸情形 φ1′ (deg.) φ ′2 (deg.) u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). -224.8 -23.2604 -200.0 -20.6897 -160.0 -16.5517 -120.0 -12.4138 -80.0 -8.2759 -40.0 -4.1379 0.0 0.0000 40.0 4.1379 80.0 8.2759 120.0 12.4138 160.0 16.5517 208.4 21.5548. 22.4239 179.8742 -238.9561 8.0646 -239.1751 -224.8504 -23.2604 22.4239 179.8742 -212.4282 8.0646 -212.6472 -200.0195 -20.6917 22.4239 179.8742 -169.7651 8.0646 -169.9842 -160.0196 -16.5537 22.4239 179.8742 -127.2014 8.0646 -127.4204 -120.0195 -12.4158 22.4239 179.8742 -84.7494 8.0646 -84.9684 -80.0195 -8.2779 22.4239 179.8742 -42.4184 8.0646 -42.6374 -40.0195 -4.1400 22.4239 179.8742 -0.2148 8.0646 -0.4338 -0.0195 -0.0020 22.4239 179.8742 41.8577 8.0646 41.6387 39.9805 4.1359 22.4239 179.8742 83.7986 8.0646 83.5795 79.9805 8.2738 22.4239 179.8742 125.6093 8.0646 125.3903 119.9805 12.4118 22.4239 179.8742 167.2936 8.0646 167.0745 159.9805 16.5497 22.4239 179.8742 217.5520 8.0646 217.3330 208.3631 21.5548. 圖 4.2 理想裝配條件下蝸桿 1 與蝸輪 1 之接觸齒數與運動誤差 35. K.E. 接觸比 (arc-sec.) 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 3.61 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000.
(47) 表 4.3 理想裝配條件下蝸桿 2 與蝸輪 1 之接觸情形 φ1′ (deg. φ ′2 (deg.) ) -209.9 -21.7911 -200.0 -20.6897 -160.0 -16.5517 -120.0 -12.4138 -80.0 -8.2759 -40.0 -4.1379 0.0 0.0000 40.0 4.1379 80.0 8.2759 120.0 12.4138 160.0 16.5517 200.0 20.6897 225.3 23.2257. u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). 23.9915 177.3102 -227.2390 7.0487 -232.7296 -210.6472 -21.7911 23.9915 177.3102 -216.7127 7.0487 -222.2034 -200.7727 -20.7696 23.9915 177.3102 -174.1105 7.0487 -179.6012 -160.7727 -16.6317 23.9915 177.3102 -131.5782 7.0487 -137.0688 -120.7726 -12.4937 23.9915 177.3102 -89.1275 7.0487 -94.6181 -80.7726 -8.3558 23.9915 177.3102 -46.7682 7.0487 -52.2588 -40.7726 -4.2179 23.9915 177.3102 -4.5085 7.0487 -9.9991 -0.7726 -0.0799 23.9915 177.3102 37.6460 7.0487 32.1554 39.2274 4.0580 23.9915 177.3102 79.6914 7.0487 74.2008 79.2274 8.1959 23.9915 177.3102 121.6259 7.0487 116.1353 119.2274 12.3339 23.9915 177.3102 163.4498 7.0487 157.9592 159.2274 16.4718 23.9915 177.3102 205.1646 7.0487 199.6739 199.2273 20.6097 23.9915 177.3102 231.4817 7.0487 225.9911 224.5153 23.2257. K.E. 接觸比 (arc-sec.) 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 3.62 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000. 圖 4.3 理想裝配條件下蝸桿 2 與蝸輪 1 之接觸齒數與運動誤差 36.
(48) 表 4.4 理想裝配條件下蝸桿 1 與蝸輪 2 之接觸情形 φ1′ (deg. φ ′2 (deg.) ) -222.2 -22.9932 -200.0 -20.6897 -160.0 -16.5517 -120.0 -12.4138 -80.0 -8.2759 -40.0 -4.1379 0.0 0.0000 40.0 4.1379 80.0 8.2759 120.0 12.4138 160.0 16.5517 200.0 20.6897 241.9 25.0265. u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). 22.4239 179.8742 -254.1506 8.0646 -254.3696 -222.2677 22.4239 179.8742 -228.3273 8.0646 -228.5463 -200.0195 22.4239 179.8742 -181.9484 8.0646 -182.1674 -160.0195 22.4239 179.8742 -135.8000 8.0646 -136.0191 -120.0195 22.4239 179.8742 -90.0631 8.0646 -90.2822 -80.0196 22.4239 179.8742 -44.8696 8.0646 -45.0887 -40.0196 22.4239 179.8742 -0.2844 8.0646 -0.5034 -0.0195 22.4239 179.8742 43.6903 8.0646 43.4713 39.9805 22.4239 179.8742 87.0970 8.0646 86.8780 79.9805 22.4239 179.8742 130.0011 8.0646 129.7820 119.9805 22.4239 179.8742 172.4747 8.0646 172.2557 159.9805 22.4239 179.8742 214.5867 8.0646 214.3676 199.9805 22.4239 179.8742 258.4215 8.0646 258.2025 241.9231. K.E. 接觸比 (arc-sec.) -22.9932 0.0000 -20.6917 0.0000 -16.5537 0.0000 -12.4158 0.0000 -8.2779 0.0000 -4.1400 0.0000 3.86 -0.0020 0.0000 4.1359 0.0000 8.2738 0.0000 12.4118 0.0000 16.5497 0.0000 20.6876 0.0000 25.0265 0.0000. 圖 4.4 理想裝配條件下蝸桿 1 與蝸輪 2 之接觸齒數與運動誤差 37.
(49) 表 4.5 理想裝配條件下蝸桿 2 與蝸輪 2 之接觸情形 φ1′ (deg. φ ′2 (deg.) ) -208.8 -21.6818 -200.0 -20.6897 -160.0 -16.5517 -120.0 -12.4138 -80.0 -8.2759 -40.0 -4.1379 0.0 0.0000 40.0 4.1379 80.0 8.2759 120.0 12.4138 160.0 16.5517 200.0 20.6897 240.0 24.8276 262.3 27.0504. u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). 23.9915 177.3102 -243.7539 7.0487 -249.2445 -209.5909 -21.6818 23.9915 177.3102 -233.6341 7.0487 -239.1247 -200.7727 -20.7696 23.9915 177.3102 -187.7056 7.0487 -193.1962 -160.7727 -16.6317 23.9915 177.3102 -141.8459 7.0487 -147.3367 -120.7728 -12.4937 23.9915 177.3102 -96.2041 7.0487 -101.6948 -80.7727 -8.3558 23.9915 177.3102 -50.9128 7.0487 -56.4034 -40.7727 -4.2179 23.9915 177.3102 -6.0667 7.0487 -11.5573 -0.7727 -0.0799 23.9915 177.3102 38.2849 7.0487 32.7943 39.2273 4.0580 23.9915 177.3102 82.1355 7.0487 76.6448 79.2273 8.1959 23.9915 177.3102 125.5096 7.0487 120.0190 119.2273 12.3339 23.9915 177.3102 168.4506 7.0487 162.9600 159.2273 16.4718 23.9915 177.3102 211.0093 7.0487 205.5186 199.2273 20.6097 23.9915 177.3102 253.2369 7.0487 247.7462 239.2273 24.7477 23.9915 177.3102 276.6112 7.0487 271.1206 261.4877 27.0504. K.E. 接觸比 (arc-sec.) 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 3.92 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000. 圖 4.5 理想裝配條件下蝸桿 2 與蝸輪 2 之接觸齒數與運動誤差 38.
(50) 表 4.6 理想裝配條件下蝸桿 1 與蝸輪 3 之接觸情形 φ1′ (deg. φ ′2 (deg.) ) -209.6 -21.6870 -160.0 -16.5517 -120.0 -12.4138 -80.0 -8.2759 -40.0 -4.1379 0.0 0.0000 40.0 4.1379 80.0 8.2759 120.0 12.4138 160.0 16.5517 200.0 20.6897 240.0 24.8276 280.0 28.9655 321.7 33.2755. u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). 22.4239 179.8742 -279.1186 8.0646 -279.3376 -209.6412 -21.6870 22.4239 179.8742 -214.5829 8.0646 -214.8019 -160.0195 -16.5537 22.4238 179.8742 -159.7027 8.0646 -159.9216 -120.0194 -12.4158 22.4239 179.8742 -104.0043 8.0646 -104.2233 -80.0195 -8.2779 22.4239 179.8742 -50.4480 8.0646 -50.6671 -40.0195 -4.1400 22.4239 179.8742 -0.4170 8.0646 -0.6360 -0.0195 -0.0020 22.4239 179.8742 46.6238 8.0646 46.4047 39.9805 4.1359 22.4239 179.8742 91.6124 8.0646 91.3933 79.9805 8.2738 22.4239 179.8742 135.2540 8.0646 135.0350 119.9805 12.4118 22.4239 179.8742 177.9994 8.0646 177.7804 159.9805 16.5497 22.4239 179.8742 220.1304 8.0646 219.9113 199.9805 20.6876 22.4239 179.8742 261.8264 8.0646 261.6074 239.9805 24.8256 22.4239 179.8742 303.2053 8.0646 302.9863 279.9805 28.9635 22.4239 179.8742 346.0731 8.0646 345.8540 321.6631 33.2755. K.E. 接觸比 (arc-sec.) 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 4.42 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000. 圖 4.6 理想裝配條件下蝸桿 1 與蝸輪 3 之接觸齒數與運動誤差 39.
(51) 表 4.7 理想裝配條件下蝸桿 2 與蝸輪 3 之接觸情形 φ1′ (deg. φ ′2 (deg.) ) -209.6 -21.7675 -160.0 -16.5517 -120.0 -12.4138 -80.0 -8.2759 -40.0 -4.1379 0.0 0.0000 40.0 4.1379 80.0 8.2759 120.0 12.4138 160.0 16.5517 200.0 20.6897 240.0 24.8276 280.0 28.9655 320.0 33.1034 345.3 35.6374. u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). K.E. 接觸比 (arc-sec.) 23.9915 177.3102 -281.9290 7.0487 -287.4196 -210.4189 -21.7675 0.0000 23.9915 177.3102 -220.0536 7.0487 -225.5443 -160.7727 -16.6317 23.9915 177.3102 -167.8727 7.0487 -173.3632 -120.7726 -12.4937 23.9915 177.3102 -114.1971 7.0487 -119.6877 -80.7727 -8.3558 23.9915 177.3102 -60.7419 7.0487 -66.2326 -40.7727 -4.2179 23.9915 177.3102 -9.3305 7.0487 -14.8212 -0.7727 -0.0799 23.9915 177.3102 39.4411 7.0487 33.9505 39.2273 4.0580 23.9915 177.3102 85.9591 7.0487 80.4684 79.2273 8.1959 23.9915 177.3102 130.8244 7.0487 125.3337 119.2273 12.3339 23.9915 177.3102 174.5274 7.0487 169.0367 159.2273 16.4718 23.9915 177.3102 217.4111 7.0487 211.9204 199.2273 20.6097 23.9915 177.3102 259.7068 7.0487 254.2161 239.2273 24.7477 23.9915 177.3102 301.5709 7.0487 296.0802 279.2273 28.8856 23.9915 177.3102 343.1110 7.0487 337.6203 319.2273 33.0235 23.9915 177.3102 369.2195 7.0487 363.7288 344.4948 35.6374. 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000. 圖 4.7 理想裝配條件下蝸桿 2 與蝸輪 3 之接觸齒數與運動誤差 40. 4.62.
(52) 表 4.8 中心距誤差 ∆A = 0.2 mm,蝸桿 2 與蝸輪 2 之接觸情形 φ1′ (deg. φ ′2 (deg.) ) -212.5 -21.9412 -200.0 -20.6559 -160.0 -16.5230 -120.0 -12.3914 -80.0 -8.2607 -40.0 -4.1303 0.0 0.0000 40.0 4.1306 80.0 8.2618 120.0 12.3935 160.0 16.5259 200.0 20.6588 240.0 24.7923 256.8 26.5351. u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). K.E. 接觸比 (arc-sec.) 23.6897 178.0115 -246.6302 7.1818 -249.7547 -211.0707 -21.8349 2.2110 23.6786 178.0373 -232.1467 7.1894 -235.1308 -198.4059 -20.5247 2.1232 23.6437 178.1190 -185.9562 7.2126 -188.4930 -158.0345 -16.3484 1.8017 23.6123 178.1925 -139.8904 7.2321 -142.0140 -117.6971 -12.1756 1.4044 23.5885 178.2483 -94.1397 7.2457 -95.9265 -77.4275 -8.0097 0.9538 23.5748 178.2804 -48.8533 7.2522 -50.4083 -37.2477 -3.8532 0.4772 23.5715 178.2881 -4.1133 7.2519 -5.5487 2.8379 0.2936 0.0000 3.91 23.5772 178.2747 40.0636 7.2463 38.6475 42.8402 4.4317 -0.4580 23.5895 178.2458 83.7064 7.2373 82.2315 82.7783 8.5633 -0.8845 23.6061 178.2070 126.8681 7.2264 125.2802 122.6721 12.6902 -1.2736 23.6249 178.1630 169.6096 7.2148 167.8752 162.5391 16.8144 -1.6238 23.6444 178.1172 211.9903 7.2033 210.0920 202.3924 20.9371 -1.9367 23.6639 178.0719 254.0641 7.1923 251.9954 242.2412 25.0594 -2.2151 23.6718 178.0533 271.6072 7.1879 269.4672 258.9323 26.7861 -2.3155. 圖 4.8 中心距誤差 ∆A = 0.2 mm,蝸桿 2 與蝸輪 2 之接觸齒數與運動誤差 41.
(53) 表 4.9 中心距誤差 ∆A = −0.2 mm,蝸桿 2 與蝸輪 2 之接觸情形 φ1′ (deg. φ ′2 (deg.) ) -205.3 -21.4488 -160.0 -16.5792 -120.0 -12.4355 -80.0 -8.2908 -40.0 -4.1455 0.0 0.0000 40.0 4.1454 80.0 8.2904 120.0 12.4349 160.0 16.5788 200.0 20.7221 240.0 24.8648 267.6 27.5462. u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). 24.2807 176.6450 -241.0591 6.9263 -248.8156 -208.2751 -21.5457 24.3138 176.5691 -189.2591 6.9041 -197.4659 -163.3192 -16.8951 24.3409 176.5073 -143.5789 6.8870 -152.1641 -123.6312 -12.7894 24.3630 176.4567 -98.0466 6.8739 -106.9603 -83.8971 -8.6790 24.3782 176.4221 -52.7772 6.8659 -61.9440 -44.0969 -4.5618 24.3853 176.4059 -7.8674 6.8634 -17.1975 -4.2199 -0.4365 24.3845 176.4076 36.6149 6.8656 27.2124 35.7336 3.6966 24.3772 176.4244 80.6366 6.8715 71.2417 75.7538 7.8366 24.3649 176.4525 124.1970 6.8798 114.8727 115.8258 11.9820 24.3494 176.4878 167.3205 6.8895 158.1109 155.9338 16.1311 24.3323 176.5269 210.0468 6.8996 200.9792 196.0636 20.2824 24.3146 176.5673 252.4222 6.9095 243.5107 236.2042 24.4349 24.3025 176.5950 281.4616 6.9161 272.6609 263.8847 27.2984. K.E. 接觸比 (arc-sec.) -2.0449 -1.7269 -1.3633 -0.9392 -0.4768 0.0000 0.4697 3.94 0.9161 1.3291 1.7041 2.0405 2.3400 2.5197. 圖 4.9 中心距誤差 ∆A = −0.2 mm,蝸桿 2 與蝸輪 2 之接觸齒數與運動誤差 42.
(54) 表 4.10 水平軸向誤差 ∆γ h = 0.1° ,蝸桿 2 與蝸輪 2 之接觸情形. φ1′ (deg. φ ′2 (deg.) ) -209.3 -21.7503 -200.0 -20.7056 -160.0 -16.5669 -120.0 -12.4269 -80.0 -8.2856 -40.0 -4.1432 0.0 0.0000 40.0 4.1438 80.0 8.2879 120.0 12.4322 160.0 16.5766 200.0 20.7211 240.0 24.8655 263.8 27.2489. u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). 23.9501 177.4059 -244.2753 7.0649 -249.3041 -209.7681 -21.7001 23.9559 177.3927 -233.6550 7.0604 -238.7427 -200.5310 -20.7446 23.9807 177.3352 -187.8941 7.0407 -193.2409 -160.7460 -16.6289 24.0046 177.2800 -142.1990 7.0221 -147.8000 -120.9519 -12.5123 24.0255 177.2315 -96.6961 7.0058 -102.5270 -81.1328 -8.3931 24.0421 177.1933 -51.5005 6.9930 -57.5204 -41.2763 -4.2700 24.0533 177.1675 -6.7005 6.9839 -12.8586 -1.3750 -0.1422 24.0590 177.1542 37.6501 6.9783 31.4069 38.5718 3.9902 24.0599 177.1522 81.5335 6.9759 75.2537 78.5595 8.1268 24.0568 177.1594 124.9617 6.9758 118.6852 118.5806 12.2670 24.0507 177.1735 167.9670 6.9774 161.7243 158.6266 16.4096 24.0424 177.1926 210.5927 6.9801 204.4054 198.6902 20.5542 24.0327 177.2150 252.8852 6.9835 246.7680 238.7654 24.6999 24.0265 177.2294 277.9267 6.9858 271.8557 262.6296 27.1686. K.E. 接觸比 (arc-sec.) -0.9965 -0.9992 -0.9542 -0.8217 -0.6094 -0.3304 0.0000 3.94 0.3663 0.7555 1.1573 1.5647 1.9732 2.3801 2.6104. 圖 4.10 水平軸向誤差 ∆γ h = 0.1° ,蝸桿 2 與蝸輪 2 之接觸齒數與運動誤差 43.
(55) 表 4.11 水平軸向誤差 ∆γ h = −0.1° ,蝸桿 2 與蝸輪 2 之接觸情形. φ1′ (deg. φ ′2 (deg.) ) -208.4 -21.6136 -200.0 -20.6734 -160.0 -16.5362 -120.0 -12.4004 -80.0 -8.2660 -40.0 -4.1326 0.0 0.0000 40.0 4.1321 80.0 8.2638 120.0 12.3953 160.0 16.5268 200.0 20.6583 240.0 24.7898 260.7 26.8487. u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). 24.0327 177.2151 -243.2345 7.0327 -249.1862 -209.4162 -21.6637 24.0274 177.2272 -233.6148 7.0369 -239.5121 -201.0177 -20.7949 24.0017 177.2867 -187.5123 7.0573 -193.1415 -160.7951 -16.6340 23.9766 177.3447 -141.4789 7.0768 -146.8432 -120.5808 -12.4739 23.9544 177.3960 -95.6900 7.0939 -100.8147 -80.3926 -8.3165 23.9371 177.4362 -50.2987 7.1073 -55.2294 -40.2458 -4.1634 23.9257 177.4626 -5.4071 7.1166 -10.2001 -0.1482 -0.0153 23.9202 177.4753 38.9415 7.1218 34.2292 39.9008 4.1277 23.9198 177.4760 82.7541 7.1239 78.0721 79.9077 8.2663 23.9236 177.4674 126.0696 7.1236 121.3780 119.8816 12.4015 23.9303 177.4518 168.9427 7.1216 164.2120 159.8314 16.5343 23.9390 177.4316 211.4317 7.1186 206.6417 199.7649 20.6653 23.9491 177.4083 253.5925 7.1149 248.7299 239.6879 24.7953 23.9547 177.3954 275.2674 7.1128 270.3637 260.3158 26.9292. K.E. 接觸比 (arc-sec.) 1.0192 1.0224 0.9767 0.8401 0.6216 0.3358 0.0000 3.9 -0.3695 -0.7594 -1.1600 -1.5649 -1.9701 -2.3734 -2.5740. 圖 4.11 水平軸向誤差 ∆γ h = −0.1° ,蝸桿 2 與蝸輪 2 之接觸齒數與運動誤差 44.
(56) 表 4.12 垂直軸向誤差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之接觸情形 φ1′ (deg. φ ′2 (deg.) ) -204.3 -21.3007 -200.0 -20.7384 -160.0 -16.5889 -120.0 -12.4401 -80.0 -8.2922 -40.0 -4.1454 0.0 0.0000 40.0 4.1441 80.0 8.2871 120.0 12.4290 160.0 16.5701 200.0 20.7106 240.0 24.8506 262.1 27.0246. u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). 24.2045 176.8194 -240.1542 6.8880 -248.6895 -207.8729 -21.5041 24.2037 176.8213 -235.1656 6.8884 -243.6978 -203.5187 -21.0537 24.1926 176.8468 -189.2101 6.8947 -197.6716 -163.4228 -16.9058 24.1743 176.8888 -143.2446 6.9064 -151.5535 -123.2592 -12.7510 24.1489 176.9472 -97.4225 6.9229 -105.4974 -83.0301 -8.5893 24.1178 177.0187 -51.8990 6.9428 -59.6735 -42.7498 -4.4224 24.0836 177.0977 -6.8029 6.9643 -14.2363 -2.4401 -0.2524 24.0488 177.1779 37.7850 6.9854 30.7045 37.8749 3.9181 24.0158 177.2541 81.8374 7.0048 75.0971 78.1752 8.0871 23.9859 177.3230 125.3715 7.0217 118.9427 118.4482 12.2533 23.9599 177.3833 168.4322 7.0360 162.2785 158.6883 16.4160 23.9376 177.4349 211.0766 7.0480 205.1605 198.8951 20.5754 23.9188 177.4785 253.3635 7.0577 247.6497 239.0708 24.7315 23.9098 177.4994 276.5758 7.0624 270.9601 261.2389 27.0247. K.E. 接觸比 (arc-sec.) -3.1406 -3.0610 -2.3388 -1.6519 -1.0234 -0.4702 0.0000 3.88 0.3886 0.7033 0.9553 1.1559 1.3159 1.4438 1.5007. 圖 4.12 垂直軸向誤差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之接觸齒數與運動誤差 45.
(57) 表 4.13 垂直軸向誤差 ∆γ v = −0.1° ,蝸桿 2 與蝸輪 2 之接觸情形 φ1′ (deg. φ ′2 (deg.) ) -213.6 -22.0899 -200.0 -20.6428 -160.0 -16.5161 -120.0 -12.3888 -80.0 -8.2604 -40.0 -4.1308 0.0 0.0000 40.0 4.1320 80.0 8.2651 120.0 12.3992 160.0 16.5339 200.0 20.6693 240.0 24.8052 262.4 27.0747. u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). K.E. 接觸比 (arc-sec.) 23.7638 177.8386 -247.5506 7.2203 -249.9106 -211.5076 -21.8801 3.1889 23.7669 177.8315 -231.9999 7.2186 -234.3749 -197.9811 -20.4808 2.9436 23.7812 177.7982 -186.1245 7.2094 -188.5999 -158.1013 -16.3553 2.2363 23.8034 177.7464 -140.4046 7.1946 -143.0667 -118.2916 -12.2371 1.5725 23.8326 177.6786 -94.9749 7.1753 -97.9004 -78.5424 -8.1251 0.9719 23.8663 177.6002 -49.9363 7.1536 -53.1801 -38.8345 -4.0174 0.4465 23.9019 177.5177 -5.3483 7.1314 -8.9378 0.8548 0.0884 0.0000 3.96 23.9367 177.4369 38.7681 7.1103 34.8312 40.5466 4.1945 -0.3709 23.9692 177.3617 82.4217 7.0914 78.1551 80.2565 8.3024 -0.6742 23.9983 177.2946 125.6414 7.0750 121.0745 119.9937 12.4131 -0.9198 24.0236 177.2361 168.4671 7.0611 163.6343 159.7619 16.5271 -1.1179 24.0453 177.1860 210.9429 7.0496 205.8795 199.5612 20.6443 -1.2775 24.0636 177.1437 253.1129 7.0401 247.8517 239.3893 24.7644 -1.4063 24.0726 177.1229 276.6338 7.0356 271.2748 261.7270 27.0752 -1.4649. 圖 4.13 垂直軸向誤差 ∆γ v = −0.1° ,蝸桿 2 與蝸輪 2 之接觸齒數與運動誤差. 46.
(58) 表 4.14 中心距誤差 ∆A = 0.2 mm,水平軸向誤差 ∆γ h = −0.1° ,蝸桿 2 與蝸輪 2 之接觸情形 φ1′ (deg. φ ′2 (deg.) ) -212.1 -21.8742 -200.0 -20.6382 -160.0 -16.5064 -120.0 -12.3773 -80.0 -8.2504 -40.0 -4.1248 0.0 0.0000 40.0 4.1247 80.0 8.2497 120.0 12.3752 160.0 16.5012 200.0 20.6279 240.0 24.7551 255.1 26.3241. u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). K.E. 接觸比 (arc-sec.) 23.7302 177.9170 -246.1208 7.1664 -249.6932 -210.8965 -21.8169 3.3296 23.7110 177.9618 -232.1032 7.1805 -235.4534 -198.6158 -20.5465 3.2346 23.6467 178.1121 -185.7104 7.2267 -188.3142 -157.9976 -16.3446 2.8484 23.5865 178.2528 -139.4442 7.2684 -141.3407 -117.4240 -12.1473 2.2921 23.5381 178.3665 -93.5321 7.3005 -94.8354 -76.9545 -7.9608 1.6015 23.5065 178.4408 -48.1482 7.3205 -49.0258 -36.6300 -3.7893 0.8224 23.4929 178.4727 -3.3775 7.3285 -4.0122 3.5401 0.3662 0.0000 3.89 23.4951 178.4674 40.7774 7.3268 40.2211 43.5733 4.5076 -0.8299 23.5094 178.4340 84.3648 7.3184 83.7579 83.5001 8.6379 -1.6431 23.5317 178.3816 127.4544 7.3059 126.7060 123.3528 12.7606 -2.4262 23.5588 178.3179 170.1186 7.2913 169.1703 163.1584 16.8785 -3.1729 23.5884 178.2486 212.4236 7.2759 211.2418 202.9376 20.9935 -3.8821 23.6188 178.1774 254.4267 7.2606 252.9952 242.7046 25.1074 -4.5551 23.6302 178.1505 270.1846 7.2550 268.6573 257.6869 26.6573 -4.7826. 圖 4.14 中心距誤差 ∆A = 0.2 mm,水平軸向誤差 ∆γ h = −0.1° ,蝸桿 2 與蝸輪 2 之接觸齒數與運動誤差 47.
(59) 表 4.15 中心距誤差 ∆A = 0.2 mm,垂直軸向誤差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之接觸情形 φ1′ (deg. φ ′2 (deg.) ) -207.8 -21.5328 -200.0 -20.7040 -160.0 -16.5594 -120.0 -12.4169 -80.0 -8.2762 -40.0 -4.1374 0.0 0.0000 40.0 4.1364 80.0 8.2721 120.0 12.4076 160.0 16.5429 200.0 20.6782 240.0 24.8136 256.5 26.5052. u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). 23.9164 177.4840 -242.8361 7.0102 -249.1057 -209.1729 -21.6386 23.9085 177.5024 -233.8167 7.0154 -239.9958 -201.2716 -20.8212 23.8632 177.6075 -187.6039 7.0449 -193.2650 -160.8015 -16.6346 23.8118 177.7269 -141.4148 7.0780 -146.4878 -120.2800 -12.4428 23.7586 177.8508 -95.4467 7.1113 -99.9068 -79.7460 -8.2496 23.7086 177.9674 -49.8849 7.1415 -53.7631 -39.2454 -4.0599 23.6661 178.0666 -4.8589 7.1659 -8.2325 1.1844 0.1225 23.6335 178.1430 39.5763 7.1838 36.6046 41.5240 4.2956 23.6107 178.1963 83.4305 7.1954 80.7547 81.7721 8.4592 23.5964 178.2297 126.7538 7.2020 124.2795 121.9397 12.6144 23.5889 178.2472 169.6127 7.2049 167.2635 162.0422 16.7630 23.5865 178.2530 212.0758 7.2052 209.7934 202.0954 20.9064 23.5874 178.2507 254.2056 7.2039 251.9476 242.1128 25.0462 23.5886 178.2480 271.5435 7.2030 269.2862 258.6537 26.7573. K.E. 接觸比 (arc-sec.) -0.9942 -0.8997 -0.4852 -0.1921 -0.0231 0.0335 0.0000 3.86 -0.0971 -0.2339 -0.3914 -0.5563 -0.7201 -0.8780 -0.9368. 圖 4.15 中心距誤差 ∆A = 0.2 mm,垂直軸向誤差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之接觸齒數與運動誤差 48.
(60) 表 4.16 水平軸向誤差 ∆γ h = 0.1° ,垂直軸向誤差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之 接觸情形 φ1′ (deg. φ ′2 (deg.) ) -204.8 -21.3690 -200.0 -20.7537 -160.0 -16.6038 -120.0 -12.4530 -80.0 -8.3019 -40.0 -4.1507 0.0 0.0000 40.0 4.1500 80.0 8.2993 120.0 12.4477 160.0 16.5955 200.0 20.7425 240.0 24.8890 263.7 27.2251. u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). K.E. 接觸比 (arc-sec.) 24.1633 176.9142 -240.6731 6.9044 -248.7429 -208.0441 -21.5218 -4.1078 24.1652 176.9099 -235.1670 6.9026 -243.2627 -203.2476 -21.0256 -4.0230 24.1775 176.8816 -189.3672 6.8902 -197.6431 -163.3619 -16.8995 -3.2720 24.1824 176.8702 -143.5615 6.8836 -151.9381 -123.4052 -12.7661 -2.4658 24.1784 176.8795 -97.8821 6.8834 -106.2624 -83.3649 -8.6240 -1.6334 24.1651 176.9101 -52.4646 6.8895 -60.7473 -43.2400 -4.4731 -0.8035 24.1435 176.9597 -7.4263 6.9008 -15.5214 -3.0415 -0.3146 0.0000 3.9 24.1159 177.0232 37.1511 6.9154 29.3113 37.2104 3.8493 0.7611 24.0848 177.0949 81.2308 6.9316 73.6865 77.4925 8.0165 1.4725 24.0524 177.1695 124.8167 6.9480 117.5837 117.7845 12.1846 2.1334 24.0205 177.2433 167.9414 6.9638 161.0173 158.0712 16.3522 2.7477 23.9899 177.3138 210.6536 6.9784 204.0243 198.3436 20.5183 3.3208 23.9613 177.3800 253.0065 6.9916 246.6523 238.5972 24.6825 3.8590 23.9454 177.4169 277.9055 6.9989 271.7035 262.3929 27.1441 4.1510. 圖 4.16 水平軸向誤差 ∆γ h = 0.1° ,垂直軸向誤差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之 接觸齒數與運動誤差 49.
(61) 表 4.17 水平軸向誤差 ∆γ h = −0.1° ,垂直軸向誤差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之接觸情形 φ1′ (deg. φ ′2 (deg.) ) -203.9 -21.2328 -200.0 -20.7227 -160.0 -16.5737 -120.0 -12.4268 -80.0 -8.2822 -40.0 -4.1400 0.0 0.0000 40.0 4.1381 80.0 8.2747 120.0 12.4102 160.0 16.5448 200.0 20.6787 240.0 24.8122 260.5 26.8208. u 1 (mm) θ (deg.) ϕ1 (deg.) l(mm) ϕ 2 (deg.) φ1 (deg.) φ 2 (deg.). K.E. 接觸比 (arc-sec.) 24.2456 176.7253 -239.6373 6.8719 -248.6372 -207.7040 -21.4866 -2.1506 24.2426 176.7321 -235.1662 6.8740 -244.1391 -203.7936 -21.0821 -2.0766 24.2074 176.8130 -189.0499 6.8995 -197.6939 -163.4812 -16.9118 -1.3834 24.1647 176.9109 -142.9165 6.9304 -151.1444 -123.1025 -12.7347 -0.8192 24.1167 177.0213 -96.9432 6.9645 -104.6895 -82.6772 -8.5528 -0.4008 24.0670 177.1358 -51.3086 6.9989 -58.5453 -42.2370 -4.3693 -0.1312 24.0196 177.2452 -6.1540 7.0308 -12.8952 -1.8161 -0.1879 0.0000 3.87 23.9779 177.3418 38.4410 7.0582 32.1468 38.5584 3.9888 0.0124 23.9434 177.4214 82.4613 7.0804 76.5457 78.8715 8.1591 -0.0705 23.9168 177.4832 125.9389 7.0974 120.3284 119.1202 12.3228 -0.2266 23.8972 177.5286 168.9318 7.1099 163.5571 159.3093 16.4803 -0.4370 23.8836 177.5600 211.5058 7.1188 206.3072 199.4472 20.6325 -0.6870 23.8750 177.5800 253.7246 7.1249 248.6530 239.5432 24.7803 -0.9656 23.8722 177.5866 275.2169 7.1271 270.1944 260.0542 26.9022 -1.1131. 圖 4.17 水平軸向誤差 ∆γ h = −0.1° ,垂直軸向誤差 ∆γ v = 0.1° ,蝸桿 2 與蝸輪 2 之 接觸齒數與運動誤差 50.
數據


+7






Outline
相關文件
Teacher explains to students that Step 6 in the marketing research process involves deciding the survey contact methods (how), places (where) and times (when).. Activity
A floating point number in double precision IEEE standard format uses two words (64 bits) to store the number as shown in the following figure.. 1 sign
A floating point number in double precision IEEE standard format uses two words (64 bits) to store the number as shown in the following figure.. 1 sign
In this report, formats were specified for single, double, and extended precisions, and these standards are generally followed by microcomputer manufactures using
Whether the complaint is made in written form or in person, the complainant should provide his/her name, correspondence/e-mail address and/or contact phone
An algorithm is called stable if it satisfies the property that small changes in the initial data produce correspondingly small changes in the final results. (初始資料的微小變動
• Contact with both parents is generally said to be the right of the child, as opposed to the right of the parent. • In other words the child has the right to see and to have a
Nicolas Standaert, "Methodology in View of Contact Between Cultures: The China Case in the 17th Century ", Centre for the Study of Religion and Chinese Society Chung
