有機光電元件之時間解析光致電流顯微術
68
0
0
全文
(2) 致謝詞. 研究所在中山的兩年,首先要感謝的就是指導教授高甫仁博士,他對 於處理實驗的手法及做學問的態度都深深影響我,讓我收穫不淺。感謝張 美濙老師與蘇水祥老師,謝謝老師能指導我對於有機元件的知識,與遇到 問題能指導學生解惑,讓我對於有機元件這一部份的知識能更加充實。 其次要感謝的是實驗室的同學及學弟們,有了他們的幫助及陪伴,使 我在求學上有互相切磋琢磨的夥伴以及凸草談笑的對象,立偉、聖懿、宏 嘉、佳謙、及仁里是在實驗室裡朝夕相處兩年的同學,這兩年有你們一起 相互討論研究,有時候一些緊張的氣氛都也都淡化了,謝謝你們這兩年的 陪伴與一起研究。還有金樹、昱峰、兩位學弟,都讓我謹記在心。十年修 的同船渡,百年修的共枕眠,謝謝讓我有機會在中山能夠認識你們。 月琪,謝謝妳在我考試與碰到低潮時能一路相陪,能夠對我的包容與 體諒,謝謝妳。也謝謝當年在補習班一起準備研究所考試的老同學們,風 哥、taco、小忠忠,富民,也願你們都能順利畢業。最後要感謝我的父母這 兩年對我的支持及關心,由於他們默默的付出,使我無後顧之憂的完成學 業,感恩的心筆墨難以盡述,爸媽、我愛你們。. 捨不得你們 捨不得中山 捨不得那一片蔚藍的海 悄悄的我走了,正如悄悄的來 揮一揮衣袖,不帶走一片雲彩……. 謝謝大家,再見了中山。.
(3) 中文摘要. 光致電流顯微術已經被廣泛的應用在半導體元件及積體電路上,近而 我們創新應用於有機光電元件的量測上,在本實驗中我們用來量測有機光 電元件的反應時間,在極短的反應時間裡,我們可以擁有很高的空間解析 度,透過雷射、雷射共焦掃描顯微鏡和 RF Lock-in Amplifier 等儀器,以及 利用飛行時間式電荷傳導量測系統(Time-of-Flight),除了可以量測之前無機 半導體元件的特性外,我們也已經成功的量測計算出有機半導體元件的漂 移速率(drift velocity),對於有機元件的量測技術而言,是一大突破。 本實驗所使用的雷射是經由共焦掃描顯微鏡後打在樣品的主動區上, 所以激發的範圍由掃描區域大小決定,不同於以往的量測方法,我們所求 得半導體的漂移速率具有面的特性,可以對半導體上一整個面作時間的解 析,藉此瞭解載子在半導體上的傳輸特性。.
(4) Abstrct We have successfully implemented the time-resolved technique at frequency domain on a laser scanning microscope. The method is implemented via interfacing a lock-in amplifier with the laser scanning microscope and is used to investigate organic photonic devices (OPD). The available modalities include electroluminescence and optical beam induced current. In this way, temporal response of a device can be investigated at high spatial resolution. Despite of its now limited role in flat panel display, OPD presents as a versatile material with numerous potentials, with solar power panel as the most noted one recently. The investigation conducted enables us to better understand the fundamental dynamics of carriers unique to OPDs..
(5) 目錄. 頁次. 摘要 目錄 圖目錄. 第一章 實驗導論. 01. 第二章 時間解析之光致電流原理. 05. 2.1 光致電流的原理. 05. 2.2. DC OBIC, RF OBIC & Time-resolved OBIC. 06. 2.3. RF 訊號量測原理. 07. 2.4 飛行時間式電荷傳導系統原理. 08. 第三章 實驗架設與儀器介紹. 12. 3.1 OBIC 光路與電子線路圖. 12. 3.2 雷射光源. 13. 3.3 共焦掃描顯微系統. 13. 3.4 低噪音前至放大器(Low-noise Preamplifier). 14. 3.5 鎖相放大器(Lock-in Amplifier). 15. 第四章 實驗結果及數據分析 4.1 實驗簡介. 18 18. 第一部份:更改 chopper 頻率以觀察 solar cell 相位之 變化 4.2 樣品介紹. 18. 4.3 DC OBIC 影像. 19.
(6) 4.4 Time-Resolved OBIC 影像. 19. 第二部份:固定 chopper 頻率但更改偏壓以觀察 solar cell. 33. 相位之變化 4.5 樣品介紹. 33. 4.6 DC OBIC 影像. 33. 4.7 Time-resolved OBIC 影像. 34. 第五章 結論與未來展望. 49. 5.1 結論. 49. 5.2 未來展望. 51. 附錄一 共焦掃描顯微鏡校正程序. 53. 附錄二 Matlab 程式語法. 57.
(7) 圖目錄. 編號. 圖 2-1. 頁次. p-n junction 電子電洞分離示意圖. 05. 圖 2-2 飛行時間式電荷傳導示意圖. 09. 圖 3-1. 12. DC OBIC & Time-resolved OBIC 光路與電子線路圖. 圖 3-2(a). CW He-Ne 雷射光源. 13. 圖 3-2(b). He-Ne 雷射供應器. 14. 圖 3-2(c). He-Ne 雷射發射器. 14. 圖 3-3 共焦掃描顯微鏡架構圖. 15. 圖 3-4 低噪音前置放大器. 15. 圖 3-5 鎖相放大器. 16. 第一部份:更改 chopper 頻率 Sample A 部份 圖 4-1. solar cell 實體圖. 18. 圖 4-2. solar cell 制程材料結構示意圖. 18. 圖 4-3. solar 數位攝影及 DC OBIC. 19. 圖 4-4 在不同頻率下之鎖相放大器 x = R cos θ 輸出. 22. 圖 4-5 在不同頻率下之鎖相放大器 y = R sin θ輸出. 22. 圖 4-6 在不同 chopper 頻率下 θ 的分佈圖. 24. 圖 4-7 圖中紅線由下往上取其各點相位的值. 25. 圖 4-8 相位對距離的曲線圖. 25. 圖 4-9 反應區平均相位對頻率的曲線圖. 26. 圖 4-10 Mobility 對頻率的曲線圖. 27.
(8) Sample B 部份 圖 4-11 為 DC OBIC 之影像. 28. 圖 4-12 在不同頻率下之鎖相放大器 x = R cos θ輸出. 29. 圖 4-13 在不同頻率下之鎖相放大器 y = R sin θ輸出. 30. 圖 4-14 在不同 chopper 頻率下 θ 的分佈圖. 31. 圖 4-15 相位對距離的曲線圖. 31. 圖 4-16 更改頻率而反應區相位隨之變換的曲線圖. 32. 圖 4-17 Mobility 對頻率的曲線圖. 32. 第二部份:更改偏壓 Sample A 部份. 33. 圖 4-18 數位攝影及 DC OBIC. 33. 圖 4-19 在不同偏壓下之鎖相放大器 x = R cos θ輸出. 35. 圖 4-20 在不同偏壓下之鎖相放大器 y = R sin θ輸出. 36. 圖 4-21 在不同偏壓下 θ 的分佈圖. 37. 圖 4-22 將圖中紅線由下往上取其各點相位的值. 38. 圖 4-23 在各不同偏壓下位置與相位的曲線圖. 38. 圖 4-24 在不同偏壓下位置與反應區平均相位的曲線圖. 39. 圖 4-25 Mobility 對 Bias 的曲線圖. 39. Sample B 部份. 40. 圖 4-26 DC OBIC 影像. 40. 圖 4-27 在不同偏壓下之鎖相放大器 x = R cos θ 輸出. 42. 圖 4-28 在不同偏壓下之鎖相放大器 y = R sin θ輸出. 43. 圖 4-29 在不同偏壓下 θ 的分佈圖. 44. 圖 4-30 在各不同偏壓下位置與相位的曲線圖. 45. 圖 4-31 在不同偏壓下與反應區平均相位的曲線圖. 45. 圖 4-32 Mobility 對 Bias 的曲線圖. 46.
(9) 圖 4-33 Sample A&B 之 Mobility 對 Frequency 的曲線圖. 47. 圖 4-34 Sample A&B 之 Mobility 對 Bias 的曲線圖. 47. 圖 5-1. 飛行時間法的量測裝置. 50. 圖 5-2. 電激發光實驗架構圖. 52.
(10) 第. 一. 章. 實驗導論. 在光致電流顯微術方面,由於是使用光束取代電子束聚焦在樣品 上,可以產生對比良好、解析度高的影像。若利用光子能量略低於半 導體能隙的光束探測元件,則可深入材料檢驗其缺陷(defect)[1]-[5]。在 超快電射引進電射掃描顯微術之後,Winfried Denk 等人於 1997 年發 表了利用雙光子激發(Two-Photon excitation)產生 OBIC 訊號的技術 [6]. 。此外,超快雷射短於 200fs rise time 的脈衝,提供有效的 RF 激發. 頻寬可大於 Δf=1.8THz(因 Δf 正比於 0.36/Δτ)。所以藉由超快雷射脈 衝所特有的高時間解析能力與極寬頻寬的特性,及對於高速二極體的 時域響應具有空間解析的能力,非常適合用來量測半導體元件的高頻 訊號[7]-[9]。本實驗利用此技術來量測載子的漂移速度(drift velocity)。 載子的漂移速度是一項重要的物理參數,在室溫及高電場的情況 下載子在鍺的漂移速率約為 106~107cm/s[10],[11],此乃有助於了解載子 在元件中的傳遞機制進而改善元件結構。 利用脈衝雷射雙光子激發的特性來激發半導體元件,此即為光致 電流 OBIC(Optical Beam Induced Current),由於光源具有脈衝的效 果,我們將可在半導體元件上觀察到瞬間電流的狀態,由於其中載子 的產生是因光學激發,故不需以電極接觸樣品,雖然電致電流 EBIC (Electron Beam Induced Current)也可提供類似的功能,但與光激發 相比卻較易對樣品產生損害. [1],[12]. 。. 在我們實驗中使用 CW 雷射透過 chopperw 調變頻率來激發半導 體,使之產生電子-電洞對,並且在外部施加一電場,讓電子-電洞對 因電場的驅使下,使其中一種載子漂向訊號接收端,產生一暫態光電 流,由 RF Lock-in Amplifier 儀器我們可量測半導體上各點暫態光電 1.
(11) 流流向電極的相位延遲,由此我們可以決定飛行時間法中所產生的暫 態電流之時間長度,並且由制程的鍍膜的厚度與掃描圖形上的比例尺 來決定距離長度,之於上述二者我們可以獲得載子在半導體上的漂移 速率。. 2.
(12) 參考資料:. [1] T.Wilson and C. J. R.Sheppard, Theory and Practice of Scanning Optical Microscopy, Academic Press, London(1984). [2] P.D. Pester and T. Wilson, “Photoluminescence and Optical Beam Induced Current Imaging of Defects”,SPIE, vol.1028 Scanning Imaging(1988) [3] P.D. Pester and T. Wilson, “Time-dependent theory of optical-beam-induced current imaging of defects in semiconducoters”, J. Appl. Phys., 64(3), P1131-1135(1988) [4] T. Wilson and E.M. McCabe, “Distribution of charge carriersgenerated in semiconductor by a focused convergent lightbeam”,J.Appl. Phys., P2638-264259(8)(1986) [5] S .Takasu,Application of OBIC/OBIRCH/OBHIC (Semiconductor Failure Analysis), Application & Research Center, JEOL Ltd [6] Xu. C and W. Denk, “Two-photon optical beam induced current imaging through the backside of integrated circuits”, Apply. Phys. Lett., Vol74, 2578(1997) [7] F.-J. Kao, M.-K. Huang and Y.-S. Wang, “Two-photon optical beam induced vurrent imaging of indium gallium nitride blue light-emitting diodes” OPTICS LETTERS, Vol.24, No.20, P1407-1409(1999) [8] G. D. Reid and K. Wynne, Ultrafast Laser Technology and Spectroscopy, Encyclopedia of Analytical Chemistry, P13644-13670(2000) [9] F.-J. Kao, J.-C. Chen, S.-C. Shih and A. Wei, “Optical beam induced current microscopy at DC and Radio Frequency “, Optics Communication, Optics Communication, in press.. 3.
(13) [10] L.Reggiani, C. Canali, F. Nava, and G. Ottaviani, “Hole drift velocity in germanium”, PHYSICAL REVIEW B, Vol.16, NO.6, P2781-2791 (1977) [11] C. Jacoboni, F. Nava, C. Canali, and G. Ottaviani, “Electron drift velocity and diffusivity in germanium”, PHYSICAL REVIEW B, Vol.24, NO.2, P1014-1026 (1981) [12] T. Wilson and E.M. McCabe, "Theory of optical beam induced current images of defects in semiconductors", J. Appl. Phys. 61(1), pp191-195,1987. 4.
(14) 第. 二. 章. 時間解析之光致電流原理. 2.1 光致電流的原理 通常我們可以將半導體比喻成一個 p-n junction,如圖 2-1 所示, 在 PN 接面上會因電子電洞擴散關係,形成空間電荷層(space-charge) 或稱空乏層(depletion layer)[1],此區我們亦可以用來當作光偵測的地 方,空乏層兩側的電荷導致電場在此層產生,可加速載子移動,亦可 隔 絕 電 子 電 洞 擴 散 進 入 P 區 及 N 區 , 如 同 一 位 能 障 (potential barrier)[2]。此時若入射光子的能量大於要被激發的半導體能階,則入 射光子會被半導體吸收因而產生電子-電洞對,這時所產生之電子-電 洞對將可能復合,而尚未復合之電子及電洞則會分別往 N 層及 P 層 移動,然後經由迴路而偵測到光致電流的訊號,若在迴路上外加一逆 偏壓,則所產生的電子-電洞對受電場的影響,將更不容易復合,並 透過前置放大器,藉此我們可以偵測到更微弱的光致電流訊號[3][4][5]。. 圖 2-1 p-n junction 電子電洞分離示意圖. 5.
(15) 2.2 DC OBIC, AC OBIC & Time-resolved OBIC 光致電流顯微術是利用雷射透過共焦掃描顯微鏡後聚焦在樣品 上,倘若入射光子的能量大於該樣品的能階即可產生電子-電洞對, 這些載子經由迴路而偵測到光致電流的訊號,本實驗將光致電流顯微 術,依不同實驗性質分作下列三項。. (1) DC OBIC 一般的光致電流是以連續波雷射(CW laser)照射半導體元件時來 產生電子-電洞對,而電子-電洞對會因外加逆偏壓而在迴路上產生電 流訊號,因此可藉由偵測電流訊號的改變來檢測半導體元件上的缺陷 (defect)[6],又由於所接收電流訊號為直流的特性,故我們稱之為 DC OBIC。. (2) AC OBIC 若光源由脈衝雷射取代連續波雷射,半導體元件上將會產生脈衝 頻率的光致電流,其頻率會與雷射的重複頻率相同,由 RF Lock-in Amplifier 做 AC 訊號的偵測,而我們可以替換不同的儀器設備來達到 適應的頻率範圍,且此技術亦可量測在 real-time 具光電的活性物質 (optically active electronic material)的空間解析頻率響應,由於脈衝之 寬度與頻寬成反比,故脈衝雷射之頻寬若較窄,就相對的可產生較寬 的頻寬,用以量測元件之高頻響應,可提供高空間解析度,對於高速 半導體元件之檢測具有極大之優勢[7]。. (3) Time-resolved OBIC 而我們將具有與脈衝雷射重複頻率相同頻率的光致電流訊號加 以分析,去計算出半導體元件上各點的相位延遲,則我們所掃出的光 致電流圖形,將會有時間解析的特性,故我們稱此技術為時間解析之. 6.
(16) 光致電流(Time-resolved OBIC),藉由這個方法,配合適當脈衝頻率的 雷射光,我們可以量測各種不同元件的載子漂移速度。. 2.3 AC 訊號量測原理 由頻譜分析儀所量測與時間相關訊號 s(t ) 為 h(t ) 與 u(t ) 的卷積 (Convolution,為一量測過程): s(t ) = h(t ) ⊗ u (t ) 。其中 h(t ) 為時間域 (Temporal domain)下二極體響應的函數, u (t ) 為光照的時間分佈。 一般而言將光照分佈視為一 time-shifted 高斯(Gaussian)函數的總效 應,因為此實驗的高斯波包比二極體的響應時間窄許多,所以可以用 以下式子表示: u (t ) = δ(t ) + δ( t ± t0 ) + ... =. ∞. ∑ δ(t − nt ) 0. n =−∞. (1) 為光照的時間函數. 頻譜分析儀所測量到的訊號正比於 s(t ) 的傅立葉轉換 S ( f ),數學關係 式如下: S ( f ) ⇔ s(t ) = h(t ) ⊗ u (t ) 此代表測量過程 在此使用標記法 a(t ) ⇔ A( f ) 來定義傅立葉轉換對(Fourier transform pairs): S ( f ) = H ( f )U ( f ) 此式代表對 H ( f ) 的取樣 (取樣過程) 因式子(1)的傅立葉轉換為 U ( f ) =. 1 t0. ∞. n. n =−∞. 0. ∑ δ( f − t. ). U ( f ) 為光照的頻率函數 因此 S ( f ) = H ( f ) ⋅. 1 t0. ∞. n. n =−∞. 0. ∑ δ( f − t. ) =. 1 t0. ∞. n. ∑ H (t. n =−∞. n ) δ( f − ) t0 0. 這意 指 頻譜 分 析儀 所 量 測到的訊號, 為二極 體的取樣 轉換方程 (Sampled trandfer function)。. 7.
(17) 因此處目的在重組 H ( f ) ,故經由 sampling theorem{91/10}重組: h(t ) = [h(t ) ⊗ u(t )]s(t ) 的 inverse Fourier Transform 為二極體原始波形 H ( f ) H ( f ) = [ H ( f )U ( f )] ⊗ S ( f ) H( f ) =. ∞. n. ∑ [ H ( f )δ( f − t. n =−∞. =. ∞. )] ⊗ S ( f ). 0. n. ∑ [H (t. n =−∞. n ) S ( f − )] t0 0. n 2π t0 ( f − ) t0 1 n 故得 H ( f ) = ∑ H ( ) ⋅ sin n t0 n =−∞ t0 π( f − ) t0 ∞. 2.4 飛行時間式電荷傳導系統原理 飛行時間式 TOF(time-of-flight)技術最早是由 W. E. Spear 所提出 的,他用來量測 Se 的載子遷移率(mobility),之後有很多研究也在高 電場下成功的取得了其他材質的遷移率,利用這個技術,J. G. Ruch 和 J. F. Kino 量測了 GaAs 的電子漂移(drift)和擴散(diffusion)的速度 [8]. ,其他人也陸續使用這個方法量測了 Si 和 CdTe 的電子和電洞傳輸. 性質(tramsport properties)[9],[10],D. M. Chang 和 J. G. Ruch 也用此法在 低溫下取得 Ge 的電子速度,這些都是早期飛行時間式量測技術應用 的地方[11],近年來要了解有機發光電激發光二極體(OLED)的遷移率 及漂移速度更是與此技術息息相關[12][13]。 本實驗使用飛行時間式電荷傳導量測技術,來量測載子的漂移速 度,此原理基本上是要獲得由脈衝光源在樣品主動區上產生的載子, 在已知的原件鍍膜厚度和外加偏壓下傳輸到電極(訊號接收端)所需 的時間 [14],[15] ,簡單來說,在飛行時間法中,我們是利用一個經過 chopper 來更改頻率的脈衝雷射光源,在樣品主動區上吸收激發光產 生電子-電洞對,並使其中一種載子在電場驅使下漂移向訊號接收 端,產生一暫態光電流(transient photocurrent),如圖 2-2 所示,飛行 8.
(18) 時間法中光致電流所產生暫態電流時間長度,代表著載子從產生的地 方橫越主動區所需的時間,我們使用 RF Lock-in Amplifier 來量測主 動區上各點載子漂移到訊號接收端所延遲的相位,藉由相位我們可以 推算出載子飛行的時間,而從已知物鏡放大倍率及有機元件鍍膜的厚 度,我們可以得知載子飛行的距離,由上述我們可以決定載子在半導 體內漂移的速率。. 圖 2-2 飛行時間式電荷傳導示意圖. 9.
(19) 參考資料: [1] S.M. SZE, “SEMICONDUCTOR DEVICE Physics and Technology”, Murray Hill, New Jersey, Chapter 3, 70-83 [2] Adel S. Sedra and Kenneth C. Smith, Microelectronic Circuits, Fourth edition [3] 黃茂闊, ’’雙光子共焦顯微鏡與顯微光譜之應用:氮化鎵銦發光二 極體的光致電流影像和顯微光譜”, 國立中山大學物理研究所碩士論 文, 2000 [4] 施勝志, “超快雷射在顯微影像上得應用:高頻光致電流與二倍頻 顯微技術”, 國立中山大學物理研究所碩士論文, 2002 [5] 楊德振, “超快雷射與雷射掃描顯微術之應用:高頻光致電流及雙 光子紫外螢光成像”, 國立中山大學物理研究所碩士論文, 2004 [6] S .Takasu,Application of OBIC/OBIRCH/OBHIC (Semiconductor Failure Analysis), Application & Research Center, JEOL Ltd [7] F.-J. Kao, J.-C. Chen, S.-C. Shih and A. Wei, “Optical beam induced current microscopy at DC and Radio Frequency “, Optics Communication, Optics Communication, in press. [8] J. C. Ruch and G. S. Kino, “Measurement of the velocity-field characteristic of Gallium Arsenide”, APPLIED PHYSICS LETTERS, Vol.10, No.2, P40-42 (1967) [9] T. W. Sigmon and J. F. Gibbons, “Diffusivity of electrons and hole in silicon”, APPLIED PHYSICS LETTERS, Vol.15, No.10, P320-322 (1969) [10] C. B. Norris and J. F. Gibbons, “Measure of High-Field Carrier Drift Velocities in Silicon by Time-of-Flight Technique”, IEEE Transactions on electron devices, Vol. ED-14, No.1, P38-43 (1967). 10.
(20) [11] A. Neukermans and G. S. Kino, “Measurement of the Electron Velocity-Field Characteristics in Germanium Using a New Technique”, PHYSICAL REVIEW B, Vol7, No.6, P1973-2703 (1973) [12] 吳忠幟, 洪文誼, “利用飛行時間式電荷傳導測量系統來探討”, 台大工程學刊, 第八十八期, P61-66, 2003 [13] B. Chen and S. Liu, “Measurement of electron/hole mobility in organic/polymeric thin films using modified time-of-flight apparatus,” Synth. Met., Vol. 91, December 1997, pp. 169−171. [14] G. Ottaviani , L.Reggiani, C. Canali, F. Nava, and A. Alberigi-Quaranta, “Hole drift velocity in silicon”, PHYSICAL REVIEW B, Vol.12, No.8, P3318-3329 (1975) [15] C. Canali , C. Jacoboni, F. Nava , G. Ottaviani , L.Reggiani, and A. Alberigi-Quaranta, “Electron drift velocity in silicon”, PHYSICAL REVIEW B, Vol.12, No.4, P2265-2284 (1975). 11.
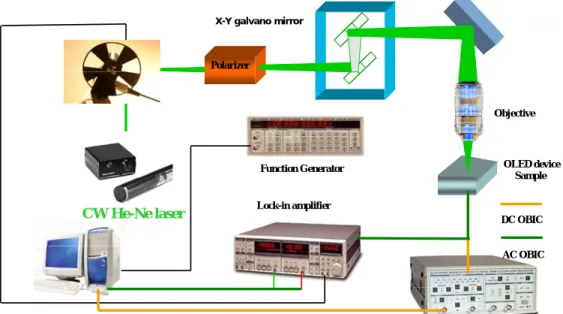
(21) 第. 三. 章. 實驗架設與儀器介紹. 3.1 OBIC 光路與電子線路圖 光致電流顯微術的實驗架構如圖 3-1,我們所使用的雷射光源為 CW He-Ne 雷射,波長設定為 543.5nm,重複頻率(Repetition rate)為經 過 chopper 來做更換,雷射經由反射鏡正確的導入 Scan Unit 裡,此 掃 描 裝 置 為 Olympus 公 司 所 生 產 的 掃 描 共 焦 顯 微 系 統 (Fluoview-IX70),雷射入射於樣品的平均功率小於 10mW,我們的成 像系統可接受 DC 訊號及 AC 訊號,DC 的電子線路為透過一前置放 大器來放大樣品所產生的光致電流訊號再傳到電腦,而 AC 部份則經 過鎖相放大器(Lock-in Amplifier)來放大訊號,鎖相放大器所接收的參 考頻率為脈衝雷射的重複頻率。. X-Y galvano mirror. Polarizer. Objective. Function Generator. CW He-Ne laser. OLED device Sample. Lock-in amplifier DC OBIC. AC OBIC. The schematics of DC and time-resolved OBIC setup. 圖 3-1 DC OBIC & Time-resolved OBIC 的光路與電子線路圖 12.
(22) 3.2 雷射光源 在本實驗中,我們所使用的雷射光源為半導體激發倍頻固態雷射 (Verdi, Coherent),所產生的單頻綠光雷射(543.5nm)。. 圖 3-2(a) CW He-Ne 雷射. 圖 3-2 (b)He-Ne 雷射供應器. 圖 3-2 (c) He-Ne 雷射發射器. 3.3 共焦掃描顯微系統 本 研 究 使 用 Olympus 共 焦 掃 描 顯 微 系 統 (Fluoview, FV-300, Olympus)為骨幹,並搭配研究室自行設計之不鏽鋼支架來進行調整, 以適合用於高頻光致電流顯微術實驗,如圖 3-3 所示,因為此型的共 焦掃描顯微鏡系統結構簡單有效,並且所使用的光學元件有極高之雙 光子共容性,相當便於改裝。 而其影像掃描裝置為 X-Y galvano-mirrors 和步進馬達組成,. 13.
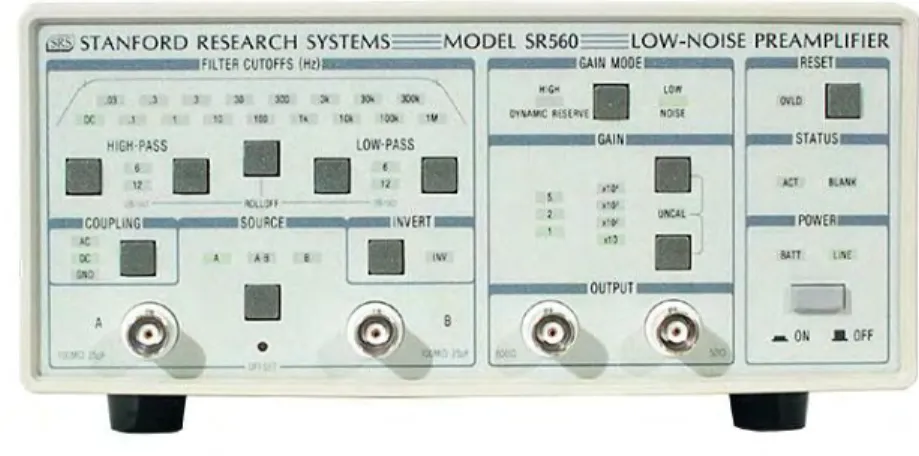
(23) galvano-mirror 可快速掃描一區域,能在 15 秒內掃描一解析度為 1024x1024 像素的影像,也可外接 function generator 來控制其光掃描 速度,進而提昇影像品質,因為使用可調整速度的光掃描器,一些反 應速度較慢的儀器如鎖相放大器,均可配合其使用,以達到 real time 的效果。 此套系統在使用若干時間後,會因人為的因素造成掃描位置與目 鏡所觀看的位置有些許偏差,圖形長與寬的比例也會有變動,所以適 時的校正是必要的,關於此套系統的校正方法於本論文的附錄一有詳 細的解說及注意事項。. (a). (b) 圖 3-3 共焦掃描顯微鏡架構圖. (a) 為不鏽鋼支架改裝的共焦掃描顯微鏡組 (b) 為掃描裝置 Scan Unit. 3.4 低噪音前置放大器(Low-noise Preamplifier) 低 噪 音 前 置 放 大 器 (Low-noise Preamplifier, Model SR560, Stanford Research System)如圖 3-4,其作用可將電壓訊號做調整及放 大,可放大倍率為 1-2-5 進位,其範圍在 1 至 50000 倍,頻率響應方 面,當 noise 於 1MHz 時為 0.5dB,300Hz 時為 0.3dB,且可選擇 50 Ω和 600Ω的阻抗輸出,達到與其他儀器阻抗匹配,以減少訊號的反 射。. 14.
(24) 圖 3-4 低噪音前至放大器. 3.5 鎖相放大器(Lock-in Amplifier) 鎖 相 放 大 器 (RF Lock-in Aamplifier, Model SR830, Stanford Research Search)如圖 3-5,鎖相放大器一般是使用在偵測及量測非常 小的交流訊號,其精準度可達到奈伏數量級的訊號,並且在即使有數 千倍的雜訊下,仍可以準確量測出非常微小的訊號,鎖相放大器的核 心為 phase-sensitive detection,能夠單獨分離出在一系統中特定的參 考頻率和相位,雜訊和其它不是參考頻率的訊號將無法影響量測,此 型號的鎖相放大器與其他最大的不同在於其可接收的訊號頻率範圍 在 0.1mHz 至 102kHz 之間。 CW He-Ne 雷射透過 chopper 的重複頻率被當成 reference 訊號輸 入鎖相放大器的參考頻率端,而被 CW 雷射激發產生的光致電流訊 號,由訊號輸入端輸入,其中一道參考頻率訊號不做相位位移,在 phase sensitive detector 與光致電流訊號疊合,再經過 low pass filter 之 後,濾掉高頻的部份,並且唯有光致電流訊號與參考頻率相同,才能 被放大從 channel one 輸出。另一道參考頻率位移 90 度到 phase sensitive detector,與光致電流訊號疊合,經過 low pass filter ,在 channel two 可得 Y=Vsin(theta).. 15.
(25) 圖 3-5 鎖相放大器示意圖. 16.
(26) 參考資料: [1] 施勝志, “超快雷射在顯微影像上得應用:高頻光致電流與二倍頻 顯微技術”, 國立中山大學物理研究所碩士論文, 2002 [2] E. Oran Brigham, The Fast Fourier transform, Prentice Hall Inc., Cahp5, (1974) [3] G. Ottaviani , L.Reggiani, C. Canali, F. Nava, and A. Alberigi-Quaranta, “Hole drift velocity in silicon”, PHYSICAL REVIEW B, Vol.12, No.8, P3318-3329 (1975) [4] C. Canali , C. Jacoboni, F. Nava , G. Ottaviani , L.Reggiani, and A. Alberigi-Quaranta, “Electron drift velocity in silicon”, PHYSICAL REVIEW B, Vol.12, No.4, P2265-2284 (1975) [5] L.Reggiani, C. Canali, F. Nava, and G. Ottaviani, “Hole drift velocity in germanium”, PHYSICAL REVIEW B, Vol.16, NO.6, P2781-2791 (1977) [6] C. Jacoboni, F. Nava, C. Canali, and G. Ottaviani, “Electron drift velocity and diffusivity in germanium”, PHYSICAL REVIEW B, Vol.24, NO.2, P1014-1026 (1981). 17.
(27) 第 四 章 實驗結果及數據分析 4.1 實驗簡介 第一部份:(更改 chopper 頻率以觀察 solar cell 相位之變化) 4.2 樣品介紹 這一部份的實驗,我們所採用的樣品為張美濙老師有機光電實驗 室黃彥良同學所制程出的有機太陽能電池,共為兩塊分別是 sample A 與 B,這兩塊都是同一個 round 所出來的 sample。圖(4-1)為此次實驗 量測的 sample 實體圖,圖(4-2)為其制程材料結構示意圖,首先先鍍 上一層 ITO 透明電極當做 solar cell 的正電極,然後再鍍上一層厚度 為 800Å 的 PEDOT 材料,接著再鍍上亦是 800Å 的 D-A(P3HT/PCBM),最後再鍍 AL(鋁)來當做 solar cell 的負電極。 結構圖上所繪的紅色箭頭是我們預測電子與電洞行經的路徑,當 正電極與負電極上下交叉的三明治結構區才是主要的 active area,其 面積為 0.03cm2。. (4-1). (4-2) 18.
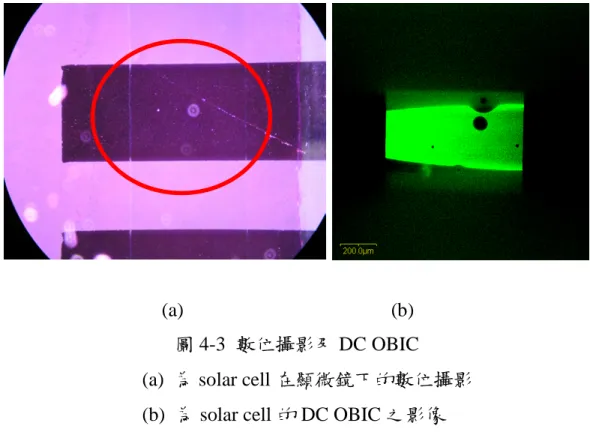
(28) 4.3 DC OBIC 影像 Sample A 部份 DC OBIC: 圖 4-3(a)為 solar cell 在顯微鏡下的數位攝影,在照片中間長形深 紫色區域為鋁負電極,除此之外可以依稀看見有一條透明 ITO 正電極 與鋁交叉重疊,交叉重疊區塊即為 solar cell 的主動反應區。圖 4-3(b) 則為此 solar cell 的 DC OBIC 影像。. (a). (b). 圖 4-3 數位攝影及 DC OBIC (a) 為 solar cell 在顯微鏡下的數位攝影 (b) 為 solar cell 的 DC OBIC 之影像. 4.4 Time-Resolved OBIC 影像 在此節的實驗中我們使用 CW 雷射(波長為 543.5nm)透過 chopper 更改其脈衝頻率來作為激發的光源,將雷射光引入 Scan Unit,經由 光掃描器在待測之 solar cell 樣品上逐點掃描,而被雷射激發的樣品也 將產生相同於 chopper 頻率的光致電流訊號,將此電流訊號導入鎖相 19.
(29) 放大器的輸入端,並以 chopper 的頻率訊號來作為鎖相放大器的參考 頻率,此後由鎖相放大器的兩個輸出端,輸出兩個含有參考頻率的交 流電訊號,此兩個訊號相差 90 度的相位,輸出之訊號由電腦依光掃 描器在待測樣品上所掃描的點,依次轉換並且紀錄成一張影像,則影 像上每一點所代表的,就是樣品在該點的含有相位函數的光致電流大 小,在這裡還有一點需要說明,由於我們使用的樣品其訊號接收端為 ITO 陽極,所以我們接收的載子為電子,本節所計算為電子的漂移速 率,Time-Resolved OBIC(時間解析之光致電流)即是本實驗的重心, 我們分別依照下列步驟量測此樣品並加以討論。. 此處我們分三步驟來計算並分析本實驗所得的數據結果。 (1) 改變 chopper 之頻率,並觀察 solar cell 其對光致電流的影響。 (2) 由掃描的圖形,再利用 Matlab 軟體計算出在不同 chopper 頻率下 的相位延遲。 (3) 使用飛行時間式電荷傳導系統原理,計算並分析元件上載子漂移 的速率。. 實驗結果如下: (1) 改變 chopper 頻率的大小 圖組 4-4 及圖組 4-5 分別為鎖相放大器 x 及 y 輸出,我們的 chopper 頻率首先從 2000Hz 開始,並且以每 200Hz 為一增加幅度,而逐一記 錄下來。 由圖組 4-4 及圖組 4-5 可看出在不同 chopper 下的 Time-Resolved OBIC 的圖,綠色及紅色圖形分別為鎖相放大器的 channel 1 輸出和 channel 2 輸出,輸出值分為 R cos θ 及 R sin θ,其中 R 是光致電流訊號 的振幅也就是訊號的強度,θ 為其相位,圖形的顏色是經由 Olympus. 20.
(30) Fluoview 軟體依所輸出的交流電訊號的強弱來配色,此處我分別就 R 振幅和 θ 相位作解說。 在 R 振幅的部份,我們從上一節 DC OBIC、圖組 4-4 及圖組 4-5 皆可看出,產生光致電流的區域越靠近反應區,訊號越強,而隨著與 反應區的距離增加,訊號漸弱。當 chopper 頻率調高後,整個反應區 相位延遲亦隨著增高的趨勢。 在 θ 相位的部份,它代表在 solar cell 上從光載子所產生的地方漂 移到電極所延遲的相位,在反應區產生的載子漂移到電極的時間很 短,是因為制程鍍膜厚度的限制,所以 θ 相對的也會較小;反之,遠 離電極的區域因載子所漂移的距離很長,所花的時間較多,故相位 θ 延遲會很大。. Sample A 之 X 輸出:. 2000Hz. 2200Hz. 2400Hz. 2600Hz. 2800Hz. 3000Hz. 3200Hz. 3400Hz. 21.
(31) 3600Hz. 3800Hz. 圖 4-4 在不同頻率下之鎖相放大器 x = R cos θ輸出 每增 200 Hz 紀錄一次 OBIC 影像。 Sample A 之 Y 輸出:. 2000Hz. 2200Hz. 2400Hz. 2600Hz. 2800Hz. 3000Hz. 3200Hz. 3400Hz. 3600Hz. 3800Hz. 圖 4-5 在不同頻率下之鎖相放大器 y = R sin θ輸出 每增加 200 Hz 紀錄一次 OBIC 影像。. 22.
(32) (2) 相位延遲的計算 我們由圖組 4-4 及圖組 4-5 雖然可以大約觀察相位隨著 chopper 的頻率變化,但卻無法直接讀出 solar cell 上之反應區各點相位延遲 的數值,因此我們必須借助 MATLAB 程式來加以運算。 首先實驗中的鎖相放大器 channel 1 輸出值為 R cos θ,而 channel 2 為 R sin θ,接下來以 MATLAB 做數學運算將 channel 2 除以 channel 1: channel 2 R sin θ = = tan θ channel1 R cosθ. 再將其取反正切: θ = tan −1(. channel 2 ) channel1. 即可得相位 θ 的分佈圖,圖組 4-6 即為在不同 chopper 頻率下之 θ 的分佈 圖,相關程式語法,透過中山大學資工所-柯正雯老師及其實驗室-許正盷 同學指導及幫忙,才能順利寫出,我們將程式語法收於附錄二。. 23.
(33) 2000Hz. 2200Hz. 2400Hz. 2600Hz. 2800Hz. 3000Hz. 3200Hz. 3400Hz. 3600Hz. 3800Hz. 圖 4-6 在不同 chopper 頻率下 θ 的分佈圖. (3) 載子漂移速度的計算 接下來我們做相位與距離的曲線圖(圖組 4-8),由於載子傳輸的路 徑為兩電極間所夾的兩層有機材料厚度,共是 1600Å。所以我們在圖 4-7 之 x 軸的 200 位置由下方往上取出一條直線,並且依序將線上各點相位的 值取出(程式語法於附錄),如下圖 4-7 的紅線所示。曲線圖 x 軸為 chopper 3800Hz bias 0.5V 時(x 軸:200;y 軸:1 到 512)所得到的相位 pixel 值,y 軸為 相位(degree)。. 24.
(34) 圖 4-7 圖中紅線由下往上取其各點相位的值. 圖組 4-8 相位對距離的曲線圖 x 軸為 phase 座標圖上的 pixel 距離,y 軸為相位(degree)。. 25.
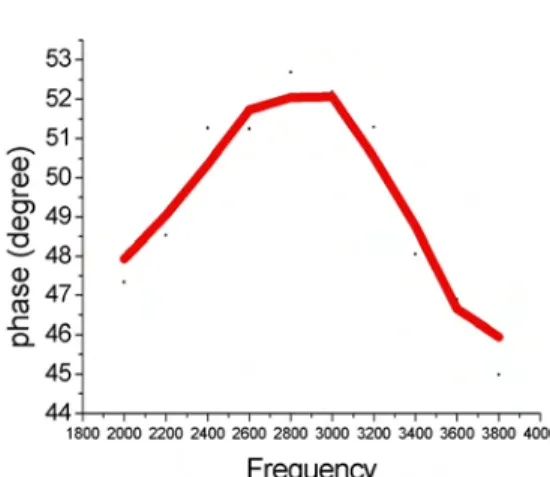
(35) 圖 4-9:反應區平均相位對頻率的曲線圖 我們在相位圖的 X 座標約 200 的位置中取一條直線上之相位一 一取出,並且繪出圖型,可以看出在反應區的相位,至於反應區外的 相位,是隨著與反應區的距離拉長而相位變大。 首先我們將載子傳輸時所延遲的相位換算成載子傳輸時所延遲 的時間,本實驗所使用的光源為 CW He-Ne 雷射,其脈衝頻率由 chopper 所決定的,我們取 3800Hz 時偏壓在 0.5V 所得到的相位來計 算,換句話說為每秒產生 3800 枝脈衝,故兩脈衝相鄰時間為重複頻 率的倒數: • 1 / 3800HZ = 2.63×10-4 (秒). 而相鄰兩脈衝間產生的光致電流訊號相位差為 360∘,依前述我們可 求得相位與時間的換算: 1 度=7.31×10-7 (秒). 於此我們決定了飛行時間法中載子傳輸所需的時間。 載子傳輸的距離,由已知制程中所鍍膜的有機層厚度來決定之, 我們可知為 1600Å。所以 phase 45 度,換算出的時間為 3.29×10-5(sec) ,故速度為距離除以時間,即為 16×10-6 cm/ 3.29×10-5(sec)=0.486(cm/s) 26.
(36) 所以漂移率為速度/電場 =1.19×10-5 (cm2/Vol.s) 最後我們將各個不同頻率的漂移率一一求出,並將之取平均,得到總 漂移率約為. 8.3×10-6 (cm2/Vol.s). 圖 4-10 :Mobility 對頻率的曲線圖. 27.
(37) Sample B 部份. 圖 4-11 為 DC OBIC 之影像 我們可以從 DC OBIC 的部份看出,有關於此 sample 的反應電極 部份的資訊,如圖 4-11 黑點代表著缺陷。有機材料一般來說是對水 和氧極度敏感的物質,只要制程過程中,元件沒有封裝或是有其他因 素導致水和氧進入元件,就可以很容易的在反應區看見一點一點的黑 色不發光區域散布其中,且黑點是會隨著時間的增長而慢慢變大,黑 點產生的因素大部份可以歸納為基板的平整度、微小顆粒的污染、有 機層與電極層間的分層(delamination)、金屬層的表面微小孔隙 (pinhole)等。除了可以看到缺陷之外,我們亦可以看出此 sample 的反 應區在左端 DC OBIC 訊號較強,故綠色部份較為明亮。而右邊因電 流訊號較弱,顏色較暗。初步可以判斷制程上所鍍的膜厚並非完全均 勻的。. (1) 改變 chopper 頻率的大小 圖 4-12 組及圖 4-13 組分別為鎖相放大器 x 及 y 輸出,我們的 chopper 頻率首先從 2000Hz 開始,並且以每 200Hz 為一增加幅度, 而逐一記錄下來。其實驗討論如同 sample A 之部份。不同的是我們 這次將 bias 都調整在 0.5V,並且逐一記錄。. 28.
(38) Sample B 之 X 輸出:. 2000hz 0.5V. 2200Hz 0.5V. 2400Hz 0.5V. 2600Hz 0.5V. 2800Hz 0.5V. 3000Hz 0.5V. 3200Hz 0.5V. 3400Hz 0.5V. 3600Hz 0.5V. 3800Hz 0.5V. 圖 4-12 在不同頻率下之鎖相放大器 x = R cos θ輸出 每增 200 Hz 紀錄一次 OBIC 影像 Sample B 之 Y 輸出:. 2000Hz 0.5V. 2200Hz 0.5V. 2400Hz 0.5V. 29. 2600Hz 0.5V.
(39) 2800Hz 0.5V. 3000Hz 0.5V. 3600Hz 0.5V. 3800Hz 0.5V. 3200Hz 0.5V. 3400Hz 0.5V. 圖 4-13 在不同頻率下之鎖相放大器 y = R sin θ輸出 每增 200 Hz 紀錄一次 OBIC 影像 (2) 相位延遲的計算 其計算部份理論與程式語法與 sample A 相同,請參考前述。. 2000Hz 0.5V. 2200Hz 0.5V. 2400Hz 0.5V. 2600Hz 0.5V. 2800Hz 0.5V. 3000Hz 0.5V. 3200Hz 0.5V. 3400Hz 0.5V. 30.
(40) 3600Hz 0.5V. 3800Hz 0.5V 圖 4-14 在不同 chopper 頻率下 θ 的分佈圖. (3) 載子漂移速度的計算 接下來做相位及頻率的曲線圖(4-16 圖) ,由於載子傳輸的路徑為兩 電極間所夾的兩層有機材料厚度,共是 1600Å。所以我們在圖 4-14 的各 不同頻率下,將 y 軸的 250 位置由下方往上取出一條直線,並且依序將線 上各點相位的值取出(程式語法於附錄)。曲線圖 x 軸為 chopper 更換不同 頻率 bias 0.5V 時(y 軸:250 ;x 軸:1 到 512)所得到的相位 pixel 值,y 軸為 相位(degree),並將之繪成曲線圖如下。. 圖 4-15 相位對距離的曲線圖 31.
(41) x 軸為 phase 座標圖上的 pixel 距離,y 軸為相位(degree)。. 圖 4-16 更改頻率而反應區相位隨之變換的曲線圖 由上圖我們可以得知當頻率逐漸調高時,主動電極區的相位有下降之 驅勢,接下來我們依照 4-4 節的載子漂移率計算方法,求出其漂移率 為. μ=1.06×10-5 (cm2/Vol.s). 圖 4-17 :Mobility 對頻率的曲線圖 32.
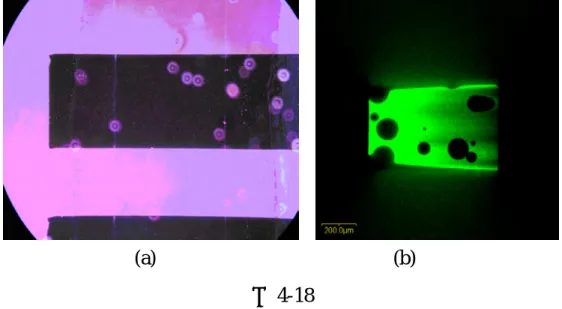
(42) 第二部份:(固定 chopper 頻率但更改偏壓以觀察 solar cell 相 位之變化) 4.5 樣品介紹 如同 4.2 節之介紹. 4.6 DC OBIC 影像 Sample A 部份: DC OBIC: 圖 4-18(a)為 solar cell 在顯微鏡下的數位攝影,在照片中間長形 深紫色區域為鋁負電極,除此之外可以依稀看見有一條透明 ITO 正電 極與鋁交叉重疊,交叉重疊區塊即為 solar cell 的主動反應區。圖 4-18(b)則為此 solar cell 的 DC OBIC 影像。. (a). (b) 圖 4-18. (a) 為 solar cell 在顯微鏡下的數位攝影 (b) 為 solar cell 的 DC OBIC 之影像. 33.
(43) 4.7 Time-Resolved OBIC 影像 此處原理與 4.4 原理皆相同,請參考 4.4 節。 我們分三步驟來計算並分析本實驗所得的數據結果。 (1) 固定 chopper 之頻率,但更改逆偏壓並觀察 solar cell 其對光致電 流的影響。 (2) 由掃描的圖形,再利用 Matlab 軟體計算出在不同 chopper 頻率下 的相位延遲。 (3) 使用飛行時間式電荷傳導系統原理,計算並分析元件上載子漂移 的速率。. 實驗結果如下: (1) 改變 solar cell 外加偏壓的大小 由圖組 4-19 及圖組 4-20 可看出在不同偏壓下的 Time-Resolved OBIC 的圖,綠色及紅色圖形分別為鎖相放大器的 channel 1 輸出和 channel 2 輸出,輸出值分為 R cos θ及 R sin θ,其中 R 是光致電流訊號 的振幅也就是訊號的強度,θ 為其相位,圖形的顏色是經由 Olympus Fluoview 軟體依所輸出的交流電訊號的強弱來配色,此處我分別就 θ 相位作解說。 在 θ 相位的部份,它代表在 solar cell 上從光載子所產生的地方漂 移到電極所延遲的相位,在反應區產生的載子漂移到電極的時間很 短,是因為制程鍍膜厚度的限制,所以 θ 相對的也會較小;反之,遠 離電極的區域因載子所漂移的距離很長,所花的時間較多,故相位 θ 延遲會很大。 隨著偏壓的增加,約 2.5V 時,此 solar cell 產生的光致電流的訊 號達到飽和(saturation),再增加偏壓 y 輸出的 R sin θ訊號也已經看不 見而呈現θ趨近於 0 的狀態。. 34.
(44) (1) 改變 solar cell 外加偏壓的大小 X 輸出:. 0.0V. 0.25V. 0.5V. 0.75V. 1.0V. 1.25V. 1.5V. 1.75V. 2.0V. 2.25V. 2.5V. 2.75V. 3.0V 圖 4-19 在不同偏壓下之鎖相放大器 x = R cos θ 輸出 每增 0.25V 紀錄一次 OBIC 影像。. 35.
(45) Y 輸出:. 0.0V. 0.25V. 0.5V. 0.75V. 1.0V. 1.25V. 1.5V. 1.75V. 2.0V. 2.25V. 2.5V. 2.75V. 3.0V 圖 4-20 在不同偏壓下之鎖相放大器 y = R sin θ輸出 每增 0.25V 紀錄一次 OBIC 影像。. 36.
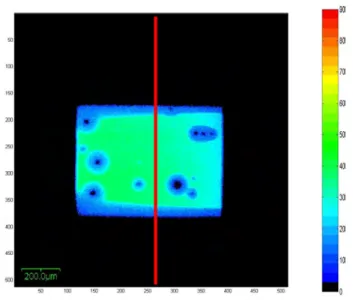
(46) (2) 相位延遲的計算 此處的相位計算方法與 4.4 節計算方法相同,此處不再另做贅述。. 0.0V. 0.25V. 0.5V. 0.75V. 1.0V. 1.25V. 1.5V. 1.75V. 2.0V. 2.25V. 2.5V. 2.75V. 3.0V 圖 4-21 在不同偏壓下 θ 的分佈圖. 37.
(47) 圖 4-22 將圖中紅線由下往上取其各點相位的值. 圖 4-23 在各不同偏壓下位置與相位的曲線圖 38.
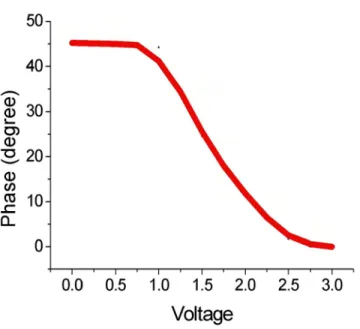
(48) 圖 4-24 在不同偏壓下位置與反應區平均相位的曲線圖。. 之後依照前述載子漂移率之計算方法,在固定的頻率 2000Hz 下,求出其漂移率為. μ=1.45×10-5 (cm2/Vol.s). 圖 4-25 :Mobility 對 Bias 的曲線圖 39.
(49) Sample B 部份 DC OBIC: 圖 4-26(a)為 solar cell 在顯微鏡下的數位攝影,在照片中間長形 深紫色區域為鋁負電極,除此之外可以依稀看見有一條透明 ITO 正電 極與鋁交叉重疊,交叉重疊區塊即為 solar cell 的主動反應區。圖 4-26(b)則為此 solar cell 的 DC OBIC 影像。. (a). (b) 圖 4-26. (a) 為 solar cell 在顯微鏡下的數位攝影 (b) 為 solar cell 的 DC OBIC 之影像. Time-Resolved OBIC 影像 此處原理與 4.4 原理皆相同,請參考 4.4 節。 我們分三步驟來計算並分析本實驗所得的數據結果。 (1) 固定 chopper 之頻率,但更改逆偏壓並觀察 solar cell 其對光致電 流的影響。 (2) 由掃描的圖形,再利用 Matlab 軟體計算出在不同 chopper 頻率下 的相位延遲。 (3) 使用飛行時間式電荷傳導系統原理,計算並分析元件上載子漂移 的速率。 40.
(50) 實驗結果如下: (1) 改變 solar cell 外加偏壓的大小 由圖組 4-27 及圖組 4-28 可看出在不同偏壓下的 Time-Resolved OBIC 的圖,綠色及紅色圖形分別為鎖相放大器的 channel 1 輸出和 channel 2 輸出,輸出值分為 R cos θ及 R sin θ,其中 R 是光致電流訊號 的振幅也就是訊號的強度,θ 為其相位,圖形的顏色是經由 Olympus Fluoview 軟體依所輸出的交流電訊號的強弱來配色,此處我分別就 θ 相位作解說。 在 θ 相位的部份,它代表在 solar cell 上從光載子所產生的地方漂 移到電極所延遲的相位,在反應區產生的載子漂移到電極的時間很 短,是因為制程鍍膜厚度的限制,所以 θ 相對的也會較小;反之,遠 離電極的區域因載子所漂移的距離很長,所花的時間較多,故相位 θ 延遲會很大。 隨著偏壓的增加,約 1.4V 時,此 solar cell 產生的光致電流的訊 號達到飽和(saturation),再增加偏壓 y 輸出的 R sin θ訊號也已經看不 見而呈現θ趨近於 0 的狀態。 X 輸出:. 0.0V. 0.1V. 0.2V. 0.3V. 0.4V. 0.5V. 0.6V. 0.7V. 41.
(51) 0.8V. 0.9V. 1.0V. 1.1V. 1.2V. 1.3V. 1.4V. 1.5V. 圖 4-27 在不同偏壓下之鎖相放大器 x = R cos θ輸出 每增 0.1V 紀錄一次 OBIC 影像。. Y 輸出:. 0.0V. 0.1V. 0.2V. 0.3V. 0.4V. 0.5V. 0.6V. 0.7V. 42.
(52) 0.8V. 0.9V. 1.0V. 1.1V. 1.2V. 1.3V. 1.4V. 1.5V. 圖 4-28 在不同偏壓下之鎖相放大器 y = R sin θ輸出 每增 0.1V 紀錄一次 OBIC 影像。. (2) 相位延遲的計算 此處的相位計算方法與 4.4 節計算方法相同,此處不再另做贅述。. 0.0V. 0.1V. 0.2V. 0.3V. 0.4V. 0.5V. 0.6V. 0.7v. 43.
(53) 0.8V. 0.9V. 1.0V. 1.1V. 1.2V. 1.3V. 1.4V. 1.5V. 圖 4-29 在不同偏壓下 θ 的分佈圖. 44.
(54) 圖 4-30 在各不同偏壓下位置與相位的曲線圖. 圖 4-31 在不同偏壓下與反應區平均相位的曲線圖。. 我們在相位圖的 X 座標位置中取一條直線,並將相位一一取出, 並且繪出圖型,可以看出在反應區的相位隨著偏壓加大而逐漸變小。 首先我們將載子傳輸時所延遲的相位換算成載子傳輸時所延遲 的時間,本實驗所使用的光源為 CW He-Ne 雷射,其脈衝頻率由 chopper 所決定的,我們因固定其頻率 2000Hz,換句話說為每秒產生 2000 枝脈衝,故兩脈衝相鄰時間為重複頻率的倒數: • 1 / 2000HZ = 5×10-4 (秒) 而相鄰兩脈衝間產生的光致電流訊號相位差為 360∘,依前述我們 可求得相位與時間的換算: 45.
(55) 1 度=1.39×10-6 (秒) 於此我們決定了飛行時間法中載子傳輸所需的時間。 載子傳輸的距離,由已知制程中所鍍膜的有機層厚度來決定之, 我們可知為 1600Å。接下來我們將相位平均並且如同前述之計算漂移 率的方法求出飄移率,是為 μ=1.64×10-5 (cm2/Vol.s). 圖 4-32:Mobility 對 Bias 的曲線圖. 46.
(56) 圖 4-33: Sample A&B 之 Mobility 對 Frequency 的曲線圖. 圖 4-34: Sample A&B 之 Mobility 對 Bias 的曲線圖. 47.
(57) 參考資料:. [1] “OLED 有機電激發光材料與元件” 陳金鑫、黃孝文著。 [2] 廖育麒,”時間解析之光致電流顯微術”國立中山大學光電工程 研究所碩士論文,2006 年。. 48.
(58) 第五章 結論與未來展望 5.1 結論 電荷移動率(mobility,μ)一直是光電材料的一個重要的特性,因 此有機材料電荷移動率的研究是非常重要的,但由於有機材料的電荷 移動率非常小,因此一般無機半導體所用的方法並不適用於有機半導 體,一般所採用的為四種量測電荷在有機材料中移動率的方法,分別 是電荷消散法(charge dissipation method),瞬間電流法(transient current method),飛行時間法(time of flight method ,TOF),和空間電 荷限制電流法(space charge limited current ,SCLC method)。四種方法 各有優缺點,但最常用的研究方法還是飛行時間法,許多有機發光二 極體或有機電晶體材料的特性均可利用此方法測得,量測的有機材料 可以是非晶形(amorphous)或者是多晶型的低分子與高分子,除了移 動率之外還可以用來測定光電效應的量子效率,可以得到比較多的資 訊。 我們先敘述傳統的飛行時間法為例,說明其原理與量測方法。 如圖 5-1 所示,在透明的 ITO 基板上成長 1μm-數個 μm 的有機薄膜, 之後再蒸鍍金屬電極,如圖示,用一脈衝雷射光束從 ITO 測照射,因 而在靠近此界面的薄膜產生光激發的載子,之後,施與一偏壓讓光激 發的載子從 ITO/有機層的界面移動至金屬電極,記錄光電流於有機 層中移動的時間特性,我們可以得到載子從一已知厚度(L)的有機層 傳遞所需的時間( tτ),進而根據(式子 5-1)算出載子的移動率。. μ=L/tτE. 49. (式子 5-1).
(59) 圖 5-1 飛行時間法的量測裝置 之前學長所量測的為鍺和矽之無機半導體,漂移率大約都是在 106 (cm2/Vol.s)左右,而這次實驗所取得的 sample 其 μ 約是在 10-5 左 右,即可觀察知兩者有機與無機材料間的電荷移動率相差 10 幾個 order,加上無機與有機半導體元件構造與制程有關,因此當初在將無 機半導體量測技術應用在有機半導體光電元件時,確實碰到了一些困 難,在得到師長與同學的協助討論下,才有辦法一一獲的解決。現在 有機材料的量測方法最常用的還是 TOF 系統,我們依照傳統 TOF 原 理所建立的量測方法,不同以往的是所鍍上的膜厚並不需達到數個 μm,因為這對制程來說有些會比較困難(通常制程有機元件所鍍上的 膜厚約是數百個 Å)。 我們成功的量測出有機光電元件的載子漂移速度,傳統上如要激 發半導體元件,通常都是利用脈衝電子束進行激發,這往往會對元件 50.
(60) 產生傷害,脈衝雷射問世後,相關的激發工作都由雷射光進行,且不 需探針或其他量測裝置的直接接觸,其非侵入式的量測能使樣品的傷 害達到最小。 本實驗藉由共軛焦掃描顯微術,可以得到樣品的空間解析度,不 同於以往,對於元件的漂移速度僅是量測整體的反應,可是在其表面 的漂移速度通常都不是線性增加的,並不均勻,若要改善元件的特 性,必需瞭解元件細部的反應。雷射經由光掃描器在待測樣品上掃 描,再將取得的訊號依次轉換並紀錄成一張影像,若再搭配高倍率的 物鏡,其解析度更可達到 1μm,藉此,我們可以量測元件上每一點的 反應,進而達到面的解析。 在飛行時間式電荷傳導量測原理裡,基本上就是要找出載子飛行的距 離及載子飛行的時間,再將距離除上時間,進而得到漂移速度的大 小,通常距離都是已知的,我們可以由已知制程上所鍍膜的厚度來取 得,因為樣品的規格及大小我們可以選擇,而時間方面通常都比較難 量測及掌握,精確的量測出飛行時間才能正確的獲得載子漂移速度, 這也是在其它量測載子漂移速度實驗最需注意的地方。在本實驗中利 用光致電流的脈衝訊號會與雷射相同的特性,再使用鎖相放大器依所 輸入的參考頻率精準的量測出光致電流訊號的相位,進而求得載子飛 行的時間,這是一種新的量測技術,若能有效的應用在半導體研發或 檢測上,應該能大幅提昇元件的良率。. 5.2 未來展望 雖然我們可以量出有機光電元件的載子漂移率,但我們實驗系統 中激發光源所採用的為綠光雷射,而現今 OLED 元件大部份是以 Alq3 為主,並參雜其他有機材料來達到其想要波段的可見光,所以以綠光 雷射的能階並不足以激發 Alq3 為主的光電元件。以後可以改為能階 更低的雷射當激發源,並且可以任意調整其脈衝頻率,如此一來在實 51.
(61) 驗部份就可以適應更多待量測的有機光電元件。 此外亦可以將 OLED 搭配 PMT(光電倍增管),可以著手於電 激發光(Electro-Luminescence)的研究,電激發光的產生並非無窮快, 其反應時間為有限值且在一個樣品上,電激發光的反應亦非均勻不 變,過去在探討電激發光的反應時間,總是測量整個光電元件,而不 考慮空間解析的問題,藉由雷射掃描顯微鏡,將原本只量測整體的反 應,變成量測每一點的反應速度,這就是 Time-resolved EL,並且可 以將得到結果來與 Time-resolved OBIC 互相做探討,相信會有更深一 層的發現。而電激發光所需使用的儀器及相關實驗的架設,於圖 5-2 所示。. 圖 5-2 電激發光實驗架構圖. 52.
(62) 附 錄 一 共焦掃描顯微鏡校正程序 1. 校正片上有 4 個尺,分別為 For FV300, 40XFN20(4:3). 40XFN20(1:1). For FV500, 40XFN18(4:3). 40XFN18(1:1). 我們校正要用的是 40XFN20(4:3). 2. 在 40X 的物鏡下將校正片對好焦,找出 40XFN20(4:3)的尺(可先 用 10X 物鏡去找以方便對焦),目鏡上的十字要對準尺上的中心, 如圖(1)。. 圖(1). 40X 物鏡下所觀察到的尺. 3. 在做校正之前先將 Fluoview 資料裡的 System 資料夾複製一份,因 為在做校正時會改變 System 裡的內部參數,所以先保留一份在桌 面。. 4. 進入 Fluoview 資料夾裡點選 FVcont.exe,在 scanner 的地方有兩個 選項,如圖(2),觀看 Scan Unit 上的標籤是否有註明”T2”,如圖(3), 若有,就選擇 6210,若沒有,則選 G120,我們選擇 6210 後按 FV 53.
(63) Initilize 開始校正。. 圖(2) 開啟 FVcont.exe 後出現的視窗. 圖(3). Scan Unit 上的標籤. 5. 在 FVcont 視窗下,Scan Speed 的地方選擇 500kHz,Pixel Size 選 擇 800X600,調整好後點選 Prepare to Scan,然後在 FTP 那欄 Trigger Position X 的部分改為 333,Y 的部分則可忽略,如圖(4)。. 54.
(64) 圖(4) 黃色圈圈的部分即是要更改的部分 6. 在 Scan 的視窗下點選 Star Scan 後,我們的校正尺要與視窗穩合, 如圖(5),用 1 字的的螺絲起子調整 XY 旋扭,X 部分上端的螺絲 為調整位移,下端的螺絲則是比例尺,Y 的部分也相同,如圖(6), 調整到最適當的大小後即可開始中心位置校正程序。. 圖(5). 800X600 的視野 55.
(65) 圖(6) 黃色圈圈的部分即是微調的地方. 7. 上述步驟完成後,在 FTP 視窗按 Full Auto Adjustment 來校正中心 位置,跑完 24 個程序後,既順利完成校正,按 Exit 離開。. 56.
(66) 附 錄 二 Matlab 程式語法 (1) 相位計算 x = imread('d:\matlab\20060427\221V.bmp'); y = imread('d:\matlab\20060427\220V.bmp'); %將鎖相放大器 channel 1 及 channel 2 輸出所掃描出來的圖讀成一個 三維矩陣。 cx = x(:,:,2); %只讀取 x 矩陣綠色部份。 cy = y(:,:,1) %只讀取 x 矩陣紅色部份。 dcx = double(cx); dcy = double(cy); %使 cx 及 cy 矩陣能做矩陣運算。. dcy(find(dcy<15)) = 0; %將 dcy 矩陣裡小於 15 的元素階設為零。 m= dcx & dcy; %取 dcx 矩陣和 dcy 矩陣的交集,矩陣上非 0 的元素皆設為 1,0 的 的地方設為 0。 phase = zeros(size(dcx)); %開啟一零矩陣其大小雨 dcx 相當。 phase(find(m)) = atan(dcy(find(m))./dcx(find(m))); %將 dcx 和 dcy 矩陣裡比照 m 矩陣元素有值得地方做相除後,再對每 一元素取反正切。 p=(phase./pi.*180); %將弧度轉成徑度 57.
(67) map_hsv = ones(30,3); %開啟一個二維陣列總共有三十個,每個裡面有三個值,且所有的值 皆為 1。 map_hsv(1,:) = [0 0 0]; %第一個陣列裡面的三個值依序為 0 0 0。 map_hsv(2:30,1) = [0.6667:-0.6667/28:0]'; %第二到三十的陣列中的第一個值為 0.6667 到 0,間隔為-0.6667/28 %即 %2 → 0.6667 %3 → 0.6667+ (-0.6667/28) %4 → 0.6667+ (-0.6667/28) + (-0.6667/28) %以此類推 map_rgb = hsv2rgb(map_hsv); %把 map_hsv 中的值轉換為 rgb 格式,原本存在 map_hsv 的值為 hue saturation intensity 格式。 figure; %表示由新的畫圖視窗來畫圖。 colormap(map_rgb); %替原本無意義的值上顏色。. imagesc(p,[0,90]),axis square; colorbar;. 58.
(68) (2) 取出一條線上相位的值 x = imread('d:\matlab\20060427\221V.bmp'); y = imread('d:\matlab\20060427\220V.bmp'); cx = x(:,:,2); cy = y(:,:,1) dcx = double(cx); dcy = double(cy);. dcy(find(dcy<0)) = 0; mask= dcx & dcy; phase = zeros(size(dcx)); phase(find(mask)) = atan(dcy(find(mask))./dcx(find(mask))); p=(phase./pi.*180);. l=p(:,265); for i=1:512; o(i,1)=l(513-i,1); end;. 59.
(69)
數據

+7


Outline
相關文件
一、訓練目標:學習照相手機及專業數位相機之拍攝技巧與電腦影像編輯軟
展覽 音樂會,戲劇,表演,動靜態展覽,模擬競賽 科技
z 圖3-39所示為電感性電 路電流增加率與時間的 關係。在第一個時間常 數的時段裡電流上升到 最大值的63.2%,而在第
三.在高解析度電視尚未普及前, HD攝錄機 也可以轉換成SD格式來拍攝, 仍然能在一 般的寬銀幕或 標準銀幕之電視觀賞HDV 格式的影像.----不過所觀賞到的影像品質 是SD的 畫質。... Sony Digital
• 在1981年,IBM發展了可變軸透鏡技術 (Variable axis immersion lenses, VAIL) 。在 1995年,接著又對此系統作局部改善,稱為 投射微縮可變軸透鏡曝影技術 (Projection
(3) 居住海外之中華民國國民申請數位借閱證時,如無身分證影本,可利 用郵寄或電子郵件提供個人身分證字號、中文名字暨中華民國護照影 本或影像檔
各縣(市)教育局(處)核定之資料,請於審查時間結束後寄回友達光電股份有限
如圖所示,將馬達、發光二極體、光電 二極體組合成光遮斷器。當馬達運轉時,安
