國
立 交 通
大
學
機 械 工 程 學 系
碩 士 論
文
創新步行輔助機構之設計與應用
Innovative Design and Application of Walking Assist Device
研 究 生:林詵漢
指導教授:鄭璧瑩 博士
創新步行輔助機構之設計與應用
Innovative Design and Application of Walking Assist Device
研 究 生:林詵漢 Student:Shih-Han Lin 指導教授:鄭璧瑩 博士 Advisor:Dr. Pi-Ying Cheng
國 立 交 通 大 學 機 械 工 程 學 系 碩 士 論 文 A Thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master In Mechanical Engineering July 2010
Hsinchu, Taiwan, Republic of China 中華民國九十九年七月
創新步行輔助機構之設計與應用 學生:林詵漢 指導教授:鄭璧瑩 博士 國立交通大學機械工程學系(研究所)碩士班 摘 要 本研究目標在於提出一新型步行輔助機構,使一完整步態週期中達到 省力的原則。蒐集被動式輔具相關文獻中,發現重力平衡的設計概念對於 省力方面有具體良好的成效,重力平衡(Gravity Balance)原理藉由置入彈簧 的方式,能使機構在運作範圍中的任何形態停駐時保持平衡,消除重力對 其關節產生的扭矩,以達到運動省力的效果。 本研究以單一兩個自由度機器腳的重力平衡架構為主,首先從步態週 期中的支撐期與擺動期推導重力平衡的系統,提出兩種省力的切換方案, 第一個方案是藉由滑動切換來滿足完整步態的重力平衡設計,另一種方案 則為了改善擺動期彈簧過餘拉伸力問題,運用機構合成設計出一套切換機 構改變彈簧固定位置來縮短彈簧長度,以降低彈簧所造成的拉伸力,並從 一 套 足 部 軌 跡 設 計 流 程 產 生 出 跨 步 動 作 , 最 後 以 SolidWorks COSMOSMotion 模擬來評估本設計之省力效果。 關鍵字:重力平衡、靜態平衡、彈簧、機構合成、步行輔助機構
Innovative Design and Application of Walking Assist Device
Student: Shih-Han Lin Advisor: Dr. Pi-Ying Cheng
ABSTRACT
In this paper, we propose an innovative walking assist device for saving energy during a complete walking cycle. After searching literature of passive assist device, we find that using gravity balancing mechanism is a useful concept for saving energy. The gravity balance condition can be achieved by implementing spring. The mechanism can be balanced at arbitrary rest configuration and reduce the torque at joints which is caused by gravity on this condition. Thus, saving energy can be done by using gravity balancing mechanism.
A 2-DOF leg mechanism with gravity balance was established. First, we derived the gravity balancing system from support and return phase in a walking cycle. Then, we developed two types of saving energy. First type is using gliding method to achieve gravity balance in a complete walking cycle. Another type is the idea of switching mechanism for adjusting the spring position to shorten spring length and reduce the excess spring force in return phase. This switching mechanism is found by mechanical synthesis. Then, we constructed a process of producing a foot trajectory to simulate a complete walking motion. Finally, we use SolidWorks COSMOSMotion to evaluate the effects of energy saving.
Key Words: Gravity Balance, Static Balance, Spring, Mechanical Synthesis, Walking Assist Mechanism
誌 謝 在研究所這兩年間,首先我要特別感謝指導教授 鄭璧瑩博士在我的學 習方向上給予指引,使我的研究這條路更加明確。在求學過程中,無論是 剛開始參加校外比賽、擔任課程助教,以及參與國科會計畫合作案甚至是 實驗室每週安排的會議裡,老師不僅殷勤地給予研究上的訓練與建議,並 以漸進的方式引導我們解決疑惑,此外亦培養學生要具有遠見思考的能力, 及平常待人處事的負責態度等,在這兩年來學到的經驗與訓練成果都使學 生獲益匪淺,畢生難忘,在此誠心地要對 鄭老師致上最深的謝意。 另外非常感謝實驗室中的所有成員,已畢業的學長亮瑜、家宏、俊融、 仲緣及志元,和在職專班學長光耀、岳芳、紹詵及勝龍,還有同學軒丞、 瑞昌、漢嘉和永修,和學弟長懋、維廷、昱登及首余,在研究所期間認識 的朋友筱偉、國銓和秉翰,以及在學期間的室友家驥,謝謝你們在這兩年 生活中的照顧與陪伴,及對於研究方面給予我的扶持與砥礪,還有其他關 心與幫助我的大學與高中好友們一路相挺,讓我在學習路上不孤單。 最後當然感謝我最敬愛的家人,在求學路途上默默地支持我直到今日, 有你們的支持與鼓勵,我才能夠完成這份學業,在此由衷地謝謝你們。 林詵漢 謹誌
目錄
摘 要 ... i ABSTRACT ... ii 誌 謝 ... iii 目錄 ... iv 表目錄 ... viii 圖目錄 ... ix 一、 緒 論 ... 1 1.1 研究背景 ... 1 1.2 文獻回顧與專利 ... 2 1.2.1 主動式 ... 2 1.2.2 被動式 ... 4 1.2.3 準被動式 ... 9 1.3 研究動機與目的 ... 10 1.4 論文架構 ... 11 二、 研究理論 ... 13 2.1 步態動作之介紹 ... 13 2.2 創意性機構設計方法 ... 162.3 機構合成 ... 18 2.3.1 三個位置合成解析法 ... 21 2.3.2 指定固定樞軸的三個位置合成解析法 ... 26 2.4 重力平衡理論 ... 29 2.5 機器人座標系轉換 ... 34 2.6 D-H 座標表示法與轉換矩陣 ... 36 三、 研究內容與方法 ... 40 3.1 機構設計流程 ... 40 3.2 觀察與比較 ... 41 3.3 概念整合 ... 43 3.4 確認設計理念 ... 45 3.5 腿部機構設計 ... 46 3.5.1 構造合成 ... 46 3.5.2 D-H 反向運動學 ... 48 3.5.3 支撐期重力平衡系統設計 ... 50 3.5.4 擺動期重力平衡系統設計 ... 53 3.6 省力設計方案 ... 55 四、 模擬與實驗結果 ... 56
4.1 SolidWorks2008 繪圖軟體介紹 ... 56 4.2 模擬軟體之驗證 ... 57 4.2.1 四連桿機構合成解析法之應用 ... 58 4.2.2 四連桿機構合成可行性之驗證 ... 60 4.2.3 重力平衡系統之應用範例 ... 61 4.2.4 重力平衡系統之驗證範例 ... 63 4.3 重力平衡系統介面化程式 ... 68 4.4 單一重力平衡機器腳之建立 ... 69 4.5 重力平衡支撐測詴 ... 70 4.6 跨步運動設計 ... 72 4.6.1 足部軌跡設計流程 ... 72 4.6.2 足部軌跡製作 ... 74 4.7 跨步省力初步模擬 ... 76 4.7.1 模擬與比較(一) ... 77 4.7.2 模擬與比較(二) ... 78 4.8 切換機構設計與模擬 ... 80 4.8.1 設計概念說明 ... 80 4.8.2 設計方法說明 ... 82 4.8.3 非連續切換模擬與比較 ... 86
4.8.4 連續切換模擬與比較 ... 87 4.9 比較與討論 ... 90 五、 結論與未來展望 ... 92 5.1 結論 ... 92 5.2 未來展望 ... 93 參考文獻 ... 95
表目錄
表 3.1 設計比較表 ... 42 表 3.2 平面二連桿 D-H 參數定義表 ... 48 表 4.1 Joint 1 轉動角計算結果 ... 75 表 4.2 Joint 2 轉動角計算結果 ... 75 表 4.3 已定義參數表 ... 84 表 4.4 計算結果參數表 ... 85 表 4.5 設計進一步比較表 ... 91圖目錄
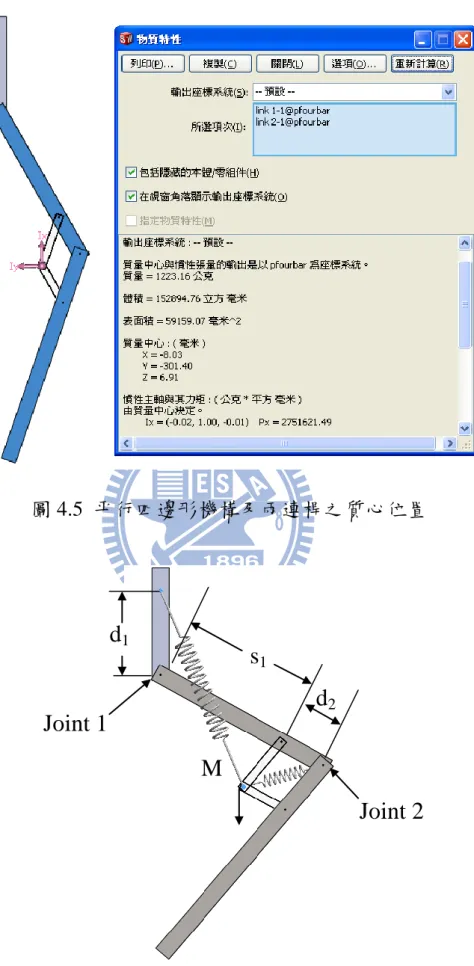
圖 1.1 體重支撐型的步行輔具 ... 4 圖 1.2 Yagn 之五種輔具設計 ... 5 圖 1.3 SpringWalker (A)側面構造圖 (B)跳躍動作連續圖... 6 圖 1.4 Arakelian 與 Ghazaryan 之重力平衡式復健輔具 ... 7 圖 1.5 Agrawal 等人之重力平衡式輔具設計 ... 8 圖 1.6 宋志元之重力平衡式助行輔具設計 ... 8 圖 1.7 Shin 與 Streit 之重力平衡式四足機器人腿部設計... 9 圖 1.8 論文架構圖 ... 12 圖 2.1 腳部之支撐與擺動期示意圖 ... 13 圖 2.2 正常人的步態週期 ... 13 圖 2.3 步行之倒置鐘擺原理示意 ... 14 圖 2.4 步行之關節旋轉定義及角度變化 ... 14 圖 2.5 足部軌跡示意圖 ... 15 圖 2.6 創意性機構設計流程圖 ... 16 圖 2.7 工程設計問題架構圖 ... 18圖 2.8 三個位置合成之解析 ... 21 圖 2.9 指定固定樞軸的三個位置合成之解析 ... 26 圖 2.10 單一自由度之連桿重力平衡系統 ... 30 圖 2.11 零長彈簧作用力對長度關係圖 ... 31 圖 2.12 滑輪式的彈簧配置表示圖 ... 32 圖 2.13 兩個自由度之連桿重力平衡系統 ... 32 圖 2.14 球面轉動之參考座標系與移動座標系關係圖 ... 34 圖 2.15 一般空間移動之參考座標系與移動座標系關係... 35 圖 2.16 D-H 連桿表示圖 ... 37 圖 3.1 設計流程規劃圖 ... 40 圖 3.2 第一種機構構造 ... 47 圖 3.3 第二種機構構造 ... 47 圖 3.4 D-H 平面二連桿 ... 48 圖 3.5 支撐期重力平衡系統參數定義圖 ... 50 圖 3.6 擺動期重力平衡系統參數定義圖 ... 53 圖 3.7 兩種省力設計方案 ... 55
圖 4.1 SolidWorks 2008 軟體介面 ... 56 圖 4.2 指定固定樞軸及其三個精確點位置座標 ... 58 圖 4.3 四連桿運動生成解析法程式 ... 59 圖 4.4 三個精確點位置之驗證 ... 60 圖 4.5 平行四邊形機構及兩連桿之質心位置 ... 62 圖 4.6 平行四邊形機構及兩連桿之質心位置 ... 62 圖 4.7 模擬動作示意圖 ... 63 圖 4.8 Joint 1 之扭矩變化(A)無彈簧(B)有彈簧 ... 64 圖 4.9 Joint 2 之扭矩變化(A)無彈簧(B)有彈簧 ... 64 圖 4.10 重力平衡減速測詴一之扭矩變化(A)Joint 1 (B)Joint 2 ... 66 圖 4.11 重力平衡減速測詴二之扭矩變化(A)Joint 1 (B)Joint 2 ... 66 圖 4.12 比較重力平衡於不同速度下 Joint 2 之扭矩 ... 67
圖 4.13 Microsoft Excel 2007 VBA 軟體介面 ... 68
圖 4.14 介面化重力平衡計算程式 ... 69
圖 4.15 單一重力平衡機器腳實驗測詴模型圖 ... 70
圖 4.17 關節扭矩比較(A)Joint 1(B)Joint 2 ... 71 圖 4.18 足部軌跡設計流程 ... 72 圖 4.19 MATLAB 足部軌跡設計程式 ... 73 圖 4.20 梯形足部軌跡路徑 ... 74 圖 4.21 梯形足部軌跡設計 ... 74 圖 4.22 軌跡路徑與腿部動作關係圖 ... 76 圖 4.23 追蹤足部軌跡路徑連續圖 ... 76 圖 4.24 模擬一 Joint 1 扭矩變化比較圖 ... 77 圖 4.25 模擬一 Joint 2 扭矩變化比較圖 ... 77 圖 4.26 彈簧固定位置變化比較圖 ... 79 圖 4.27 模擬二 Joint 1 扭矩變化比較圖 ... 79 圖 4.28 模擬二 Joint 2 扭矩變化比較圖 ... 79 圖 4.29 四連桿型切換機構之構想方案 ... 81 圖 4.30 擺動軌跡之三階段示意 ... 82 圖 4.31 P1與 P3精確點位置之求出作圖法 ... 83 圖 4.32 P2精確點位置之求出作圖法 ... 84
圖 4.33 切換機構設計圖 ... 85 圖 4.34 擺動期之切換機構動作示意 ... 86 圖 4.35 非連續切換模擬之 Joint 1 扭矩變化比較圖 ... 86 圖 4.36 非連續切換模擬之 Joint 2 扭矩變化比較圖 ... 87 圖 4.37 切換機構驅動示意 ... 88 圖 4.38 連續切換模擬之 Joint 1 扭矩變化比較圖 ... 88 圖 4.39 連續切換模擬之 Joint 2 扭矩變化比較圖 ... 88 圖 4.40 連續切換模擬之 O2扭矩變化比較圖 ... 89 圖 4.41 總扭矩變化綜合比較圖 ... 90
一、緒 論
1.1 研究背景 隨著現代科技發展的演進,主要是期望設計出的成果能夠應用於社會, 以增進人類日常生活的便利性,歷經過工業革命後,人類對機器的依賴度 日漸攀升,雖然大大提升了生產效率,過度仰賴機器的結果也使得機器已 經完全取代人力。 為了避免這個問題,科學家提出機器與人類整合的可能性,目的是要讓 機器部分取代人體,創造出增進人體機能的裝置,期望以人為基礎,而機 器僅扮演輔助的角色,這樣的點子進而成為許多科幻故事的題材,如穿戴 式輔具裝置或稱外骨骼(Exoskeleton)裝置;近年來,這類的科技整合了生物、 機械和電子領域,形成了生物機電一體化(Bio-Mechatronics)的新概念,可應 用於一些醫療或軍事等用途,一方面能彌補身體機能的退化,如協助身心 障礙者及老年人復健或輔助步行,另一方面亦可加強正常人肢體的力量, 完成像是勞力或救災工作等。 而省力輔助裝置的概念也經常廣泛應用於日常生活中,如檯燈、醫療用 手術燈支撐架等,具有輔助機構的設計往往可以讓運動時減輕負荷,像是 在工業用的機械手臂或是步行機器人等,生產前若先考量到輔助省力的概 念,也就能採用功率較小的設計,進而省下成本,伴隨著政府提倡節能的 概念逐年提升,這方面的研究也就扮演更為重要的角色了。1.2 文獻回顧與專利 蒐集相關人體或步行機器人輔助裝置的文獻與專利中發現,大致上可依 據能源的觀點分成三類來探討:主動式(Active)、被動式(Passive)與準被動 式(Quasi-Passive)三類,以下將現有的設計按照此三種類別分別做個詳細說 明。 1.2.1 主動式(Active) 所謂的主動式外骨骼輔具(Active Exoskeletons),是指其裝置必頇具有輸 入動力源與適當的控制系統,使其機構具備有效的動力輸出,才能夠帶動 身體步行或是其它動作。 1935 年的美國專利由 Cobb[1]所提出一種主動式的仿步行裝置,其用法 是先轉動在臀部的曲柄用鏈條帶動膝蓋處的扭轉彈簧,將之上緊後便可驅 動凸輪和從動件來達成一個預設的動作;1942 年 Filippi[2]利用液壓的方式 設計,在行走時帶動纜繩與連桿控制液壓閥門的開與關進而提供動力帶動 膝蓋轉動,藉此自動化地完成步態週期,以模擬步行動作。 而首次出現人機結合的主動式裝置,是由 Vukobratovic 等人在 Mihajlo Pupin Institute 發明了的 Kinematic Walker 裝置。雙腳各由一個固定於腰部的 氣壓缸提供動力帶動大腿轉動,由於其裝置僅帶動大腿關節旋轉,因此是 套非完全的主動式裝置;而真正第一套各關節具有完全氣壓缸驅動的輔具
裝置出現於 1972 年,然而此裝置在動態步行時無法穩定身體,因此必頇另 外藉由拐杖的輔助來幫助穩定。而到了 1974 年發展出第一套使用機電控制 方式的輔具裝置,由於當時電腦與電池的發展尚未如此發達,這套裝置的 功能性也因此受限。[3]
到了近代,日本本田汽車公司(Honda Motor Co., Ltd.)從 80 年代便開始 研發二足步行機器人,經過十多年的發展,到 2000 年終於發表了人形機器 人 ASIMO,並且持續推出新功能。憑藉著長期研發二足步行科技的技術與 經驗,從 1999 年起本田決定開始研發用於人類的輔助步行裝置 Walking Assist,起初的目的只是為了增添行動上的樂趣。然而,到了 2008 年 4 月 終於正式發表第一台名為「節奏步行輔具(リズム歩行アシスト)」的步行輔 助裝置[4]。此裝置利用臀部關節感測器來獲得行走時的資訊,控制左右兩 顆無刷直流馬達帶動大腿擺動,來協助老年人或肌肉萎縮患者行走。 圖 1.1 是本田公司在同年 11 月時推出了第二台體重支撐型的步行輔具 Honda Leg[5]。此裝置主要是針對可以自行走路並可正常自由控制腳部的使 用者所做的設計,其構造簡單僅由三部分所組成:座椅、支架和鞋,共重 達 6.5 公斤。使用時只需穿上鞋並提升座椅到適當位置即可,其原理是先蒐 集嵌入在鞋裡的感測器資訊,並控制兩顆馬達驅動支架,形成一向上朝著 穿戴者體重重心的反作用力,讓使用者在步行、上下樓梯及半蹲姿勢時都 能夠有支撐體重之效果,以減輕腳部肌肉及關節的負荷,此裝置已在本田
公司內部生產工廠進行測詴驗證,當作重複性的搬運工作或固定動作較持 久的檢驗工作時均能夠減輕負擔。
圖 1.1 體重支撐型的步行輔具[5]
而在日本還有類似於這種屬於體重支撐型的步行輔具,像是由筑波大學 的山海嘉之教授與他的 CYBERDYNE®公司所研發的「混合型輔助義肢
(Hybrid Assistive Limb, HAL)」[6] 。其裝置包含上肢裝、下肢裝、電池、 控制電腦、生物電訊號感測器、角度感測器與反作用力感測器等。利用感 測器偵測人體動作訊號,進而計算出機器所需力量而跟著運動,上肢裝可 用來輔助搬運重物,而下肢裝經不斷地改良也已進入量產的階段,於 2008 年 10 月提供租賃服務,目前已租用給數家醫院,並且日本政府針對老年人 或行動不便人士的租賃需求還提供了補助。。 1.2.2 被動式(Passive) 所謂的被動式外骨骼輔具(Passive Exoskeletons)與主動式的最大差異在
於前者不需額外的能量輸入,是藉由使用者所作出的動作,帶動其機件作 相對運動,來達到貯存能量或施力之目的,再將其能量或作用力回饋給使 用者,因此其裝置對使用者的關係屬於是被動的。本小節將區分成兩類, 特別將原理是使用重力平衡的輔具獨立出來介紹,其它被動式的輔具則歸 在非重力平衡式類下介紹。 1. 非重力平衡式 透過穿戴外骨骼裝置的概念來輔助人類行動能力,最早的歷史可追溯至 1889 年至 1890 年間,由 Yagn[7-11]針對走路、跑步與跳躍動作更加容易的 目標提出了五種設計專利,圖 1.2 的這五種設計概念大多都是利用彈力達到 支撐部分身體重量的效用,只是作法不同。 (A) (B) (C) (D) (E) 圖 1.2 Yagn 之五種輔具設計[7-11] 圖 1.2A 的設計是左右腳後方各有兩彈簧,可提供由下向上的支撐力; 圖 1.2B 與圖 1.2C 原理類似,是利用大型弓形彈簧提供支撐力,前者固定於 腰部上方,而後者固定於肩膀上方;圖 1.2D 於腳部加裝多條彈簧,不僅負
擔重量也吸收動作時因身體動量產生的能量;圖 1.2E 與前者功能相似,不 過係使用壓縮流體取代彈簧,透過腳底相互踩踏流體達到類似的彈力效 果。
圖 1.3A 是 1991 年由 Dick 與 Edwards[12]兩人合作發明一套雙足的移動 裝置,命名為―SpringWalker‖,其主要框架固定於使用者背部,並利用萬向 接頭銜接到下方的框架,使用者的雙腳固定在其下部框架,因此雙腳不與 地面接觸,當腳步開始伸展帶動連桿機構牽引纜繩而拉伸主要彈簧,而儲 存的彈性位能接著轉換成支撐身體的力量,達到使用者只需花費些微力量 就可輕鬆跳躍的目的,圖 1.3B 是跳躍情況的連續動作圖。 (A) (B) 圖 1.3 SpringWalker (A)側面構造圖 (B)跳躍動作連續圖[12] 2. 重力平衡式 重力平衡(Gravity Balance)原理應用在機械系統中可大幅減輕驅動馬達 的扭矩,然而其重力平衡系統的設計往往忽略彈簧的質量。2007 年,
Arakelian 與 Ghazaryan[13]提出了考慮彈簧質量的重力平衡系統,改良了重 力平衡的精準度,並探討零長彈簧(Zero Free Length Spring)與非零長彈簧 (Non-Zero Free Length Spring)兩種型式,應用其理論設計出復健用腿部輔具, 減輕臀部與膝蓋關節的扭矩,圖 1.4 為其設計架構圖。
圖 1.4 Arakelian 與 Ghazaryan 之重力平衡式復健輔具[13]
圖 1.5 為 2006 年由 Agrawal、Fattah 與 Banala 等人[14]亦利用重力平衡 原理所設計步行輔具的專利設計圖。設計方法是找出桿件與使用者腿部的 總重心位置,由此形成平行四邊形機構尺寸,使用零長彈簧(Zero Free Length Spring)連接至其總重心,再以此機構在任何運動形態的下總位能為定值為 條件,推導求出其彈簧的彈性係數,因此讓使用者在抬腿時幾乎是感到無 重力的狀態。
圖 1.5 Agrawal 等人之重力平衡式輔具設計[14] 類似還有本實驗室過去由宋志元[15]所研究的設計,以 Honda Leg 為參 考加入 TRIZ 創新理論,設計了一個創新的重力平衡式步行輔助雙足機構系 統,用來幫助殘障人士與老年人,使其可以維持正常的步行活動,並與前 述 Agrawal 等人之設計做比較,為重力平衡式輔具提供了一個新概念。 圖 1.6 宋志元之重力平衡式助行輔具設計[15] 另外在機器人的設計中,如 Shin 和 Streit[16]在 1993 年針對四足機器人 的腿部各裝設兩支彈簧,推導滿足重力平衡時的配置條件,使得二支撐二 抬腳步態情況時,能夠幫助馬達負荷腿部桿件與機身的重量,藉著模擬單
一步態週期的情況,比較馬達扭矩值發現確實能有效降低,也表示能量的 消耗亦減低,另外為了適應腳部支撐或抬腳的變化,特別設計一組由另一 驅動器帶動連桿來改變彈簧固定位置的機構,圖 1.6 為其機構設計圖。 圖 1.7 Shin 與 Streit 之重力平衡式四足機器人腿部設計[16] 1.2.3 準被動式(Quasi-Passive) 由 Valiente[17]等人提出一種準被動式的耐力強化腿支架裝置。主要架 構是在臀部與踝關節置入彈簧,在膝關節則置入了電子式可變阻尼,在步 態週期中彈簧負責儲存與釋放能量,可變阻尼則可消耗能量,可適時增加 阻尼係數使其結構剛性化而具有支撐效果,因此能源的消耗比起全主動式 的還低得多。準被動式外骨骼輔具結合了主動與被動式的特色,其本質是 被動式的架構,無任何驅動裝置的輔助,但卻又能透過外加控制的方式主 動回饋作用力給使用者。
1.3 研究動機與目的 首先針對現有的輔具設計進行評估,發現主動式輔具因具備驅動源與感 測器,頇面臨到能源與控制問題,且研發成本與複雜度較高。因此,本研 究期望先以純機構設計的被動式輔具設計為出發點,加上從相關文獻中發 現,重力平衡的設計概念對於省力方面有具體良好的成效,所以以重力平 衡方式設計考量,架構出滿足重力平衡理論的模型,再透過軟體作個模擬 以便分析其省力成效。 這次成果的目的為設計出一套創新的輔助步行裝置,此裝置先以步行機 器人的腿部機構為研究對象,藉由動態模擬分析一段完整步行動作,以降 低關節扭矩為主要目標,提供本實驗室後續設計機器人腿部機構的參考基 礎,並給予應用於人體步行輔助機構設計上的一個新的靈感。
1.4 論文架構 本論文共五章,內容包括: 第一章『緒論』:說明輔助裝置的研究背景,及各種輔助步行裝置的介紹, 包含主動式、被動式與準被動式外骨骼輔具,其中被動式中更細分成重力 平衡與非重力平衡式來作說明,最後則說明研究動機與目的與論文架構。 第二章『研究理論』:首先探討人體與機器腳步態特性,接著闡述創意性機 構設計流程,及機構合成的介紹與運動生成解析法,接著介紹重力平衡基 本理論並以範例說明,最後介紹機器人連桿的座標轉換理論。 第三章『研究內容與方法』:說明本研究規劃的設計程序,從步態理論角度 切入觀察現有設計並作比較,整合概念並確認設計理念,結合機構合成與 重力平衡概念來產生腿部機構的新型設計。 第四章『模擬與實驗結果』:使用程式撰寫方式建構理論模型,並透過軟體 模擬新型設計之效果,探討本實驗結果。 第五章『結論與未來展望』:將現階段研究成果作結論,並說明未來論文研 究方向。
圖 1.8 論文架構圖 上圖 1.8 為本論文之架構,首先透過構造合成找出機械腳機構型式,再 來從步態理論觀點切入推導支撐與擺動狀態的重力平衡系統,這部分是屬 於靜態方面的問題。然後透過 SolidWorks COSMOSMotion 模擬他人重力平 衡設計,說明了在動態的模擬環境仍然具有省力效果,接著透過理論撰寫 程式來設計一重力平衡模型,為了模擬跨步動作,我們以 MATLAB 程式撰 寫反向運動學程式並製作出足部軌跡,接著為了解決以支撐期為主的重力 平衡設計運用在擺動期所造成的費力反效果,本研究構思一個四連桿切換 機構設計,透過切換方式將縮短彈簧長度來降低彈簧過多的拉伸力,透過 模擬並分析其省力效果產生了一套新型輔助步行設計。
二、研究理論
2.1 步態動作之介紹 首先從人體每個步態循環週期來看,可以分成支撐期(Stance)與擺動期 (Swing)[18],如圖 2.1 為腳部之支撐與擺動期示意。初期當腳底剛接觸地面 時,身體重量即由此腳傳遞至地面,從地面形成一向上之反作用力提供支 撐,這段接觸地面的期間故稱為支撐期;擺動期顧名思義,即腳底離開地 面時,大腿往前擺動時的期間。圖 2.2 為完整的步態週期及其對應雙腳的支 撐與擺動期示意,可知其中會有大約 12%的期間是屬於雙腳支撐(Double Support)的情況。 圖 2.1 腳部之支撐與擺動期示意圖[18] 圖 2.2 正常人的步態週期[19]步態支撐期的腳部運動如同固定於地面作剛體旋轉,因此有如一倒置的 鐘擺運動原理[20],圖 2.3 步行之倒置鐘擺原理示意圖。所以外骨骼輔具之 設計,亦是利用在這段期間內達到剛體的效果,進而分擔一部分身體重量, 使得雙腳的負荷減輕。 圖 2.3 步行之倒置鐘擺原理示意[20] 如圖 2.4 所示,將腳部簡化成三個旋轉自由度,包括臀部(Hip)、膝蓋(Knee) 和腳踝(Ankle)關節,定義臀部關節逆時針旋轉角度為正,其餘關節為負。 根據此定義,參考文獻[21]量測各關節在行走時的角度變化,受測者為一正 常男性(28 歲,體重 82kg,腳長 0.99m,行走速度 1.27m/s),雖然量測出的 數據可能因人而異,但是其曲線的特性大致上是相同的。 圖 2.4 步行之關節旋轉定義及角度變化[21]
對仿生步行機器人而言,研究足部運動軌跡是重要的課題。圖 2.5 是一 足部軌跡示意圖,足部軌跡為完成一次跨步週期時,足端所描繪出的線段, 是一條封閉曲線,根據行走模式不同,也可能採用不同的軌跡型式來達到 目的,採用 Song 與 Waldron[22]定義出足部軌跡參數的幾個名詞如下: 1. 支撐相(Support Phase):當腿部與地面接觸的時段,如圖 2.5 粗線部份為 支撐段。 2. 回復相(Return Phase):當腿部與地面失去接觸的時段,如圖 2.5 細線部 份為跨步段。 3. 週期時間(Cycle Time):經歷一固定跨步週期的時間。 4. 步距(Leg Stride):完成一次完整跨步時,身體重心的移動量。 5. 衝程(Stroke):當腳在支撐段時,相對於身體重心的移動量。 6. 責任因數(Duty Factor):支撐相與週期時間的比值。 圖 2.5 足部軌跡示意圖 衝程 支撐段 跨步段 水平寬度 垂直高度 地面
2.2 創意性機構設計方法
要獲得新型的步行輔助機構,本研究根據顏鴻森[23]的創意性設計方法 (Creative Design Methodology)進行一套系統化的設計流程或步驟,來產生可 能之機械裝置的拓樸構造,創意性機構設計流程如圖 2.6 所示,此方法包括 下列步驟:
1. 現存機構(Existing Design) 首先只考慮與設計構造有關的規格,找出一個或數個的現有機構,歸納 出其拓樸構造之特性。 2. 一般化(Generalization) 選擇任一現有機構後,將其裝置各式機件與接頭轉換成具有一般化連桿 與接頭的一般化鏈。 3. 數目合成(Number Synthesis) 根據數目合成理論,尋找符合原始一般化鏈的機件與接頭數目之全部可 能運動鏈圖譜。 4. 特殊化(Specialization) 指定機件與接頭類型至上述步驟得到的每個一般化鏈,設計需求與限制 獲得可行的特殊化運動鏈。 5. 具體化(Particularization) 將每個特殊化鏈將其具體化為對應的簡圖,獲得可行的機構裝置。 6. 新設計圖譜(Atlas of New Designs)
2.3 機構合成
圖2.7所示為工程設計架構,一般機械工程設計就其問題的性質可分成 「 機 構 分 析 」 (Analysis of Mechanisms) 與 「 機 構 合 成 」 (Synthesis of Mechanisms)兩大類。 圖 2.7 工程設計問題架構圖 其中「機構分析」是根據已有的某一種機構,敘述其機件尺寸、接頭種 類,與驅動方法等,獲得各個運動特徵,如位移(Displacement)、速度(Velocity)、 加速度(Acceleration)、急跳度(Jerk),以及其某個機件的運動方式與描繪路 徑等。 而所謂的「機構合成」是已知輸入與輸出條件後,透過運動學(Kinematics)
理論的應用,創造出具備特定運動特性的機構,包括其機構種類、機件數 目與尺寸大小等。通常機構合成可分為「型式合成」(Type synthesis)、「數 目合成」(Number synthesis)與「尺度合成」(Dimensional synthesis)三類。
「型式合成」是根據問題的描述,決定最恰當的機構,如連桿機構、齒 輪機構或凸輪機構等,是一種定性合成,這方面往往頇具備許多經驗與知 識,如了解現有機構及其性能與製造上的可行性。 「數目合成」是決定其機構的桿數與接頭數,如四連桿、五連桿、六連 桿等,然而當機構的桿數與接頭數越多的時候,其組合變化亦越多,頇將 所有可能的運動鏈全部列出來,一般業界工程師可略過這一複雜程序,直 接查詢所需運動鏈圖譜來使用。[23] 當完成上述合成步驟後,便開始進行「尺寸合成」,是決定某一種型式 機構的尺寸大小,這是機構合成中最重要的課題,透過尺寸合成的方法, 才能達到滿足預期需求的機構。 有關「尺度合成」部分,因實際應用問題的性質不同,可更分為「函數 生成」(Function Generation)、「路徑生成」(Path Generation)與「運動生成」 (Motion Generation)三種方式來解決。
「函數生成」是定義機構輸入運動與輸出運動之間的關係。 「路徑生成」是定義某一點輸出座標沿著指定的路徑運動。
指定位置,其解法包括利用幾何原理的圖解法與數學計算的解析法,圖解 法雖然簡單迅速,但不適合用在多精確點位置的尺寸合成,由於解析法能 夠藉由電腦來幫助參數運算,且其精確度相較於圖解法高,亦適合用於多 精確點位置的尺寸合成,因此本文選擇以解析法作為主要的研究方法,以 下就四連桿的運動生成解析法做個介紹。
2.3.1 三個位置合成解析法[24] 圖 2.8 三個位置合成之解析[24] 問題描述: 如圖 2.8 所示,設計一四連桿組,使其耦桿上的某一點會從 P1點移到 P2再移到 P3點,從第一個精確點(Precision Point)到第二個精確點轉動了 角 度,第一個精確點到第三個精確點轉了 度,求此四連桿組各桿件的尺寸。
解析程序: 根據圖 2.7 向量定義,列出左半邊對矢的兩條向量迴路方程式: (2.1a) (2.1b) 用複數向量表示成: (2.2a) (2.2b) 展開後如下 (2.3a) (2.3b) 再整理成下式 (2.4a) (2.4b) 其中向量 、 、 同一連桿的不同位置,長度均為 。同理 、 、 表同一連桿,長度均為 。 (2.4)式為向量方程式,將尤拉等式代入可得到四個純量方程式,分成實 部與虛部如下: 實部 (2.5a) (2.5b) 虛部(不含 j)
(2.5c) (2.5d) (2.5)式中共有 12 個變數: 、 、 、 、 、 、 、 、 、 、 與 ,後六項為問題已定義 的變數: 、 、 、 、 與 ,剩下的六個變數中必頇給予假定兩個 值,才能由四個方程式去解四個未知數,其中一個解法是假設 、 值, 於是就只剩下未知數: 、 、 、 ,正好是 與 的長度與角度,可寫成 如下: ; (2.6a) ; (2.6b) 將(2.6)式代入(2.5)式,得到: (2.7a) (2.7b) (2.7c) (2.7d)
以符號簡化成: (2.8a) (2.8b) (2.8c) (2.8d) 其中 ; ; (2.9a) ; ; (2.9b) ; ; (2.9c) ; ; (2.9d) 將此系統寫成標準矩陣形式: (2.10) 如此一來,只要在(2.10)式左右兩邊同乘其 方陣的反矩陣,便能求 得其左半連桿長。 依此類推,由右半邊對矢向量迴路方程式: (2.11a) (2.11b) 假設 和 ,同樣將 、 分成 X 與 Y 分量,可得到以下矩陣關係式,
求出角度 與 。 (2.12) 其中 ; ; (2.13a) ; ; (2.13b) ; ; (2.13c) ; ; (2.13d) 由以上推導可知,三個位置的合成可能有無窮多組解,若選擇不合適的 假設值,其機構亦可能無法在指定位置運動,因此通常假設值的選擇頇藉 由經驗來判斷。
2.3.2 指定固定樞軸的三個位置合成解析法[24]
利用上一節的技巧解四連桿尺寸時,常常發生其固定樞軸位置可能超出 機構內部空間,於是以下介紹一套固定樞軸的合成方法可供使用。
接續上一節的參數定義,針對圖 2.9 所示中的每個精確點寫出向量迴路 方程式: (2.14a) (2.14b) (2.14c) 用複數向量表示,得到: (2.15a) (2.15b) (2.15c) 展開後 (2.16a) (2.16b) (2.16c) 因為 且 ,故代入寫成: (2.17a) (2.17b) (2.17c) 之前假設 、 值求向量 、 ,現在由固定樞軸 座標來反求 、 , 若給予 、 值,且其(2.17)式中矩陣行列式值為零,則有一個解存在。
(2.18) 整理後 (2.19) 其中 (2.20a) (2.20b) (2.20c) (2.19)式表示一個封閉迴路向量和,使用尤拉等式展開式子,分解成實 部與虛部,再聯立解方程式求 、 。將關係式平方相加可消去一變數, 再以半角公式取代正弦與餘弦函數,最後得到未知角度之正切函數的二次 方程式,如下: (2.21a) (2.21b) 其中 (2.22a) (2.22b) (2.22c) 且 ; ; (2.23a)
; ; (2.23a) (2.24a) (2.24b) (2.24c) (2.24d) (2.24e) (2.24f) 然後針對需要的固定樞軸 位置,重複此程序以解出右半邊連桿組所需 的方向角 和 。 此時,透過此程序已確定的 、 、 和 角,剩下的工作就是使用 (2.10)式解出 、 、 及 值,以及使用(2.12)式解 、 、 及 值。 2.4 重力平衡理論(Gravity Balance) 某一機構在每個任何可能動作型態下的總位能皆保持定值,我們稱此機 構達到重力平衡(Gravity Balance)或靜態平衡(Static Balance)的效果,滿足靜 態平衡時,其機構本身對驅動器完全不施加任何負荷,因此能採用功率較 小之設計,以期達到節省能量之目的,重力平衡機構設計通常有配置重量 平衡、彈簧平衡、液壓平衡三種方法。 由於配置重量方法會造成機構總質量增加,使得慣性力亦增加是其缺點, 而液壓平衡頇提供額外力量輸入,將牽涉到複雜的控制問題,因此應用於 被動式外骨骼輔具方面通常是選擇彈簧平衡的方法,藉由重力位能與彈力 位能的相互轉換來使得系統總位能保持定值,其優點是設計時置入彈簧較
為簡易,對於系統總質量之影響也較小。 圖 2.10 為單一自由度之連桿重力平衡系統範例,此系統最早是由 Hain[25]於 1961 年所提出,利用一零長彈簧固定一個一端是旋轉接頭的連 桿,m 代表連桿質量,r 為旋轉接頭樞至質心距離,δ 為彈簧總長度,δ 為 彈簧原長,b 為彈簧與連桿固定點至旋轉接頭之距離,c 則為彈簧固定點與 旋轉接頭之距離,θ 為連桿與水平面之距離,g 為重力加速度 圖 2.10 單一自由度之連桿重力平衡系統[26] 其重力位能Um與彈性位能Us可寫成: (2.25) (2.26) 其中 (2.27) 假設δ ,系統總位能U可簡化成下式: (2.28) 若要達到重力平衡條件,連桿在每個位置的總位能必頇為固定常數;換 θ
句話說,即其值不隨角度變化,因此我們對θ 微分,令dU dθ ,可得:
(2.29) 從(2.29)式可看出,當 m、g、r、b 與 c 參數為已知時,便可求出其彈簧 k 值,以滿足系統重力平衡;或是在已知彈性係數 k 值時,而反求置入彈簧 的位置。 由於上述 k 值頇以δ 為前提所求得的,一種方式是可選擇以零長彈 簧(Zero Length Spring)來達成這項條件,零長彈簧是由 Lucien LaCoste[27] 於 1932 年所發現,從圖 2.11 可發現,因其作用力與彈簧長度關係圖之特性, 其延伸線會通過原點,於是可假想成未施力時,其自由長度為零的彈簧, 但實際上這種彈簧卻是個初始是緊縮到固定長度的狀態,施力到一定程度 才會開始有伸長量出現,自由長度並非真的為零。 圖 2.11 零長彈簧作用力對長度關係圖 另一種方法則是根據 Rahman 和 Ramanathan 於文獻[28]所提到的方式, 如圖 2.12 所示,彈簧配置在 wv 連線以外的連桿上,纜線由從 w 點通過 v 點固定的滑輪與彈簧作連接,選擇同樣 k 值的彈簧再調配纜線長度來達到 虛擬零長彈簧的效果。
圖 2.12 滑輪式的彈簧配置表示圖[28] 根據 Agrawal 於參考文獻[29]中探討兩個自由度的重力平衡系統,其系 統如下圖 2.13 所示: 圖 2.13 兩個自由度之連桿重力平衡系統[29] 其中 COM(Center of Mass)表示為兩連桿系統質心位置,其值為兩連桿 質量相加,而從此質心處再延伸出兩連桿形成一平行四邊形機構,假設新 增兩連桿之質量可忽略,則根據其幾何關係可知: (2.30) (2.31) COM
總位能如下: (2.32) 將(2.30)式與(2.31)式代入(2.32)式整理可得 (2.33) 其中 ; (2.34) 經整理後,將與角度有關的係數令為零,如下: ; ; (2.35) 故解得:
;
(2.36) 若 、 、 、 為已知條件,則其彈性係數可從(2.36)式求得,便可 達到系統的重力平衡,亦可由已知 值來反求彈簧固定處的長度 。
2.5 機器人座標系轉換[30] 圖 2.14 球面轉動之參考座標系與移動座標系關係圖 圖 2.14 為一參考座標系和移動座標系之間的位置相關圖,令 i,j,k 為參 考座標系 A 的三軸之單位向量,而 u,v,w 為移動座標系 B 的三軸之單位向 量,當以參考座標系 A 來描述 u,v,w 這三個向量時,可以得到以下結果: (2.37) 該點 P 的位置向量由 A 來表示: (2.38) 或是以移動座標系 B 表示: (2.39) 將(2.37)式代入(2.39)式可以得到以參考座標系 A 所表示的 P 點的位置向 量:
(2.40) 比較(2.38)式與(2.40)式可得: (2.41) 將(2.41)式以矩陣表示為: (2.42) 其中 (2.43) 因為(2.43)式矩陣為正交矩陣,所以 ,若要反求 對 間的關係,可由下式求得: (2.44) 以下則考慮一般性空間移動的座標轉換關係: 圖 2.15 一般空間移動之參考座標系與移動座標系關係
根據圖 2.15 可見移動座標系除了轉動外還包含了移動 q,從圖中的向量迴 路可知兩座標系之間的關係如下:
(2.-45) 將(2.45)式整理成均質轉換矩陣(Homogeneous Transformation Matrix)可得: (2.46) 其中 (2.47) 若要反求 對 間的關係時,因為 並非正交矩陣( ), 將(2.45)式等號兩邊同乘 ,又 ,可得: (2.48) 其中 (2-49) 有了(2.49)的關係式,即可輕易的求得兩座標系之間的轉換關係。 2.6 D-H 座標表示法與轉換矩陣[30] 機器人連桿座標的定義是使用 Denavit-Hartenberg(簡稱 D-H)表示法,圖 2.16 是連桿座標與參數之定義圖,每支連桿包含四個參數,對於旋轉接頭 而言,其中 ai、αi和 di三個參數為固定值,另一個 θi值為可變值,各座標 系統的定義遵循以下規則:
1. zi軸頇與第(i+1)關節之軸心線重合。 2. xi軸頇由第(i)關節指向第(i +1)關節,且與兩關節軸線相互垂直。 如兩關節軸線平行,則 xi軸為垂直兩關節軸線之任意處。若兩關 節軸線在同一平面上,則 xi軸垂直於此平面。 3. yi軸則由右手定則決定。 圖 2.16 D-H 連桿表示圖 當座標系建立後,便可從座標幾何性質找出下列參數: ai:zi-1軸沿 xi軸到 zi軸之間的偏移距離。 di:xi-1軸沿 zi-1軸到 xi軸的偏移距離。 αi:zi-1軸繞 xi軸轉動到 zi軸的角度。 θi:xi-1軸繞 zi-1軸轉動到 xi軸的角度。 依照上述表示法建立好機器人連桿的座標系統後,發現第(i-1)座標系統
至第(i)座標系統將歷經兩次座標軸旋轉與兩次座標軸平移過程,接著利用 2.5 節所介紹的均質轉換矩陣,依序建立圖 2.16 中兩兩座標系統之間的 形式的轉換矩陣,下列為座標轉換步驟:
1. 第(i-1)座標系沿 zi-1軸平移 di長度,使原點 Oi-1與點 Hi-1重合,其轉 換矩陣如下: T (2.50)
2. 第(i-1)座標系沿 zi-1軸旋轉θi值,使 xi-1軸與 xi軸重合,其轉換矩陣 如下: T cos sin sin cos (2.51) 3. 第(i-1)座標系沿 xi軸平移 ai長度,使原點 Oi-1與點 Oi重合,其轉換 矩陣如下: T (2.52) 4. 第(i-1)座標系沿 xi軸旋轉αi值,使之與第(i)座標系完全重合,其轉 換矩陣如下: T cos sin sin cos (2.53)
將上述(2.50)、 (2.51)、 (2.52)及 (2.53)式相乘,即可得出機器人連桿兩 關節之間的轉換矩陣,此矩陣稱為 D-H 轉換矩陣(Denavit-Hartenberg transformatrion matrix),整理後表示如下: (2.54)
三、研究內容與方法
3.1 機構設計流程 在設計創新的機構前,為求保證成功地創造出有效的裝置,必頇規劃一 套設計程序。如 1.3 節研究動機與目的所述,本研究首先從評估相關文獻之 各個設計後,決定以純機構設計輔助的型式為基礎,然後就步態理論觀點 切入整理並探討現有設計上面的優缺點,整合概念進而產生一個設計構想, 從這個構想配合重力平衡與機構合成理論的推導,最後利用軟體分析驗證 其省力效果,詴圖提出一個對於助行器的全新設計概念[31],圖 3.1 為本研 究輔助步行系統設計流程規劃圖。 圖 3.1 設計流程規劃圖 相關文獻與資料蒐集 評估並選擇輔助型式 觀察與比較 重力平衡 概念整合 機構合成 確認設計理念 機構創新設計 模擬分析 步態理論 產生新型設計3.2 觀察與比較 對於一般動物或是步行機器人而言,無論是站立或是步行時,重力是造 成其關節扭矩負荷的最大因素,在 2.1 節提到,步態期間就其單一腿部動作 來看,如同人步行方式一樣可簡單區分成支撐與擺動狀態,支撐時關節有 上部身體與其下部腿部所有重量造成其扭矩來源,而抬腳時該腳關節只剩 腿部本身重量所造成的扭矩負荷,因此在一次跨步週期中,明顯地可知此 兩時段對於關節的影響程度並不相同。 因此從這樣角度切入探討他人之設計,在 1.2 節參考文獻中提到了 Arakelian 等人[13]與 Agrawal[14]等人兩者設計均使用重力平衡原理(見圖 1.4 與圖 1.5),然而此系統僅滿足在跨步週期中的抬腳擺動期間,模型只考 量到大腿、小腿加上連桿的重量,雖然在擺動時任何位置皆能保持靜態平 衡,但在支撐期的關節仍舊頇負荷身體重量額外給予的扭矩,因此只適合 用於復健方面,以減輕使用者抬腿時的施力大小,而不適合在整體步行上 達到完全省力之效果。 而 Shin 等人[16]之四足步行機器人腿部設計(見圖 1.7),同樣以重力平衡 系統為方法,先簡化機器人只有半邊,推導的模型是當前腳與後腳個別分 屬支撐與擺動時的狀態,並假設當前腳抬起時,後腳正好踏地。另外。模 型有考量到機身荷重,接著透過一個切換機構反覆地調整彈簧固定位置,
使重力平衡結果永遠滿足於整體步行過程,而固定彈簧位置這項參數是先 假定已知彈簧係數值所求得,面對不同機身質量的步行機器人,藉由調整 這項參數便能達到靜態平衡條件,而不必更換彈簧;反觀 Arakelian 等人[13] 與 Agrawal 等人[14]之設計,使用同樣的機構裝置,唯一能調整的參數只有 彈性係數,所以當使用者不同時,必頇更換彈簧才能符合完全的重力平衡 系統,否則就只能達到部分省力效果,這是其缺點之一。 比較兩者設計之異同,簡單整理成表如下所示: 表 3.1 設計比較表 Arakelian/Agrawal 等人設計 Shin 等人設計 重力平衡機構 是 是 推導模型 單一腳模型 半邊前後腳模型 單腳自由度 2 2 單腳使用彈簧數 2 2 有效省力期 僅擺動期 完整跨步週期 機構支撐對象 僅腿部 腿部或機身皆考量 步行輔助效果 較差 優 適合用途 腿部關節復健 步行機器人 用於不同使用者 頇更換彈簧 調整彈簧固定位置
3.3 概念整合 由於 Shin 等人[16]該重力平衡設計針對整體步行上有較為完善的考量, 值得再進一步觀察並條列出以下幾個優缺點: 優點: 1. 重力平衡系統考量身體支撐與擺動跨步的設計,使步態週期中 皆能保持重力平衡狀態。 2. 腿部機構設計簡易,為平面兩自由度的連桿構造。 3. 調整彈簧固定位置即可適應步態週期中支撐與擺動的不同負荷, 而不需重新更換彈簧或改變機構的質量。 缺點: 1. 前後腳不可同時接觸地面的情況下才能滿足省力條件,必頇是 二支撐二抬腳的步態規劃,使步行方式較固定。 2. 當行進速度加快時,受到慣性力的影響,彈簧反而給予額外的 力造成馬達扭矩。
對於步行輔助效果上,本研究同樣期望能整合上述三項優點為設計概念, 然而最重要的是要詴圖改善上述提到的兩項缺點,以下就缺點方面進行探 討。 首先,第一項缺點雖然是原設計者預先希望的限制前提,但實際上四足 機器人步行時為求平衡穩定度,在步態的時序上就顯得相當重要。這部分 已有許多學者針對穩定度提出方法,如三角形步法,或對角線步法等,因 此 Shin 等人[16]之設計,當為求步態穩定時,勢必會在某些時刻出現前後 腳同時接觸地面的狀態,或是只有一隻腳抬起跨步。舉例來說,正常人步 行約 12%期間是屬於雙腳支撐,此時反而是破壞了這個重力平衡系統的前 提。 針對這問題,本研究期望提出以包含 2-DOF 之單一機器腳為一架構,來 建立一個重力平衡系統,如此一來,每隻腳可視作獨立的運作系統,而不 必遷就於另一隻腳的步態型式,這樣做的好處是在面對雙足或多足機器人 的腿部機構亦可套用此設計,能夠應用的廣泛度也就提升了。[31] 再來思考設計缺點第二項,我們知道重力平衡配置彈簧的目的在於能夠 使機構的任何停駐位置保持不動,例如想使機構從姿態 A 作動到姿態 B, 在 A 和 B 姿態雖是保持穩定省力的,但機構作動過程中若產生加速度,此 時彈簧不僅可能失去省力效果,反而造成一抗力。
第二項缺點其實是所有使用到彈簧式重力平衡機構的共同問題,當有加 速度出現,因彈簧限制而感到更大的阻礙,本實驗室於 2009 年提出一個方 法:「利用彈簧或多連桿機構將身體重量轉換儲存起來,用作下一個動作的 施力,或是減少之後動作時,身體所要負載的重力。」[31][15],意思是將 彈簧阻力化為助力。事實上,文獻回顧中提到 Dick 與 Edwards[12]設計的 SpringWalker(圖 1.6),其原理就近似於這種用法,代表這是個現有且良好的 解決方式。但後續我們模擬的動作都設定成較慢速的穩定步態作分析,可 以降低這種現象。 3.4 確認設計理念[31] 本節就上述整合的概念,條列出本研究期望符合的設計理念: 1. 設計對象為 2-DOF 的機器腳,先從較為簡易的平面機構來探討模與 擬如同人體大腿與小腿的腳。 2. 以一個單一機器腳為模型,建立一套自我獨立的重力平衡系統,用 以應用於其它雙足或多足機器腳。 3. 設計一個省力切換機制,用以分別適應步態週期中,支撐期與擺動 期不同荷重之情況。 4. 建立出完整步態週期的足部軌跡,用以模擬跨步動作與比較跨步所
需的扭矩,以降低關節扭矩為省力的目標。 3.5 腿部機構設計 3.5.1 構造合成 根據顏鴻森著機構學[32]的機構合成流程方法找出腿部機構設計的構造 型式。 1. 確定以 2-DOF 為腿部機構設計,如模擬人體大腿與小腿。 2. 運動空間類型的選擇以平面機構為主。 3. 接頭類型的選擇決定以旋轉接頭,如模擬臀關節與膝關節。 4. 平面機構的自由度 可由式(3.1)求出: (3.1) 其中 :i 型接頭數目 :i 型接頭拘束度 本研究決定都以旋轉接頭為設計,根據上式可得: (3.2) 若取機件數 ,解得 ,得出機構構造如圖 3.2。
圖 3.2 第一種機構構造 取機件數 ,解得 ,得到如下圖機構型式。 圖 3.3 第二種機構構造 圖 3.3 便是其中一種以四連桿為主的機構,O 點為固定軸樞,L1與 L2 如大腿與小腿關係,若為平行四連桿型式,則 L2旋轉作動與 L4同步,依此 類推 L1與 L3也是,藉由這項特性可將兩驅動源放置與 O 點帶動 L1 與 L2 便可模擬步伐。 O L1 L2 L3 L4
3.5.2 D-H 反向運動學 由於要使機器腳跨步頇符合預先設定的足部軌跡路徑,要先得知足部軌 跡的幾個座標點,反求各關節的旋轉角度,其中的相互關係我們可以利用 D-H 法求得。 以下為 2-DOF 為模型推導反向運動學,下列為計算過程詳細說明: 圖 3.4 D-H 平面二連桿 首先按圖 3.4 參數定義列出 D-H 表如下: 表 3.2 平面二連桿 D-H 參數定義表 Joint i αi ai di θi 1 0 a1 0 θ1 2 0 a2 0 θ2 以下為二連桿的 D-H 矩陣 、 : (3.3) θ1 θ2 x0 y0 y1 x1 P(x,y) a1 a2
(3.4) 將(3.3)式矩陣與(3.4)式矩陣相乘可得矩陣 及末端 P 點的 x、y 座標位置: (3.5) (3.6) (3.7) 將(3.6)式與(3.7)式平方後相加得到: (3.8) 解得 值為:
(3.9) 將(3.9)式代入(3.6)式與(3.7)式計算出 :
(3.10)
3.5.3 支撐期重力平衡系統設計 圖 3.5 支撐期重力平衡系統參數定義圖 首先從步態中支撐期情況建立一獨立的重力平衡系統,在不考慮摩擦力 的情況,以及機身加入僅上下移動而不左右傾倒的條件,依圖 3.5 之參數定 義,寫出此系統總位能: (3.10) 其中 h2 h1 h3 h4 hb d1 l1 d4 d2 l2 c1 c2 b2 b1 Mb O d3 θ2 θ1 hb’ m1 m2 m3 m4
假設彈簧自由長度為零,伸長量為: (3.11) (3.12) 將(3.11)、(3.12)式代入(3.10)式,得到: (3.13) 整理成 (3.14) 其中 令 、 ,此時位能與角度項無關,則可以達到重力平衡,故求得:
(3.15)
(3.16) (3.15)式與(3.16)式為彈簧固定位置距固定軸樞 O 點的距離,當我們假 定彈簧係數 k 值後,配合其它已知的桿件重量與長度值,便可求得調整彈 簧固定位置,來達成支撐時的重力平衡系統。我們由(3.15)式與(3.16)式計算 公式中,發現到計算的結果不論設計參數為何,結果必定為正值,代表固 定位置必在 O 點之上。
另外,本研究將此結果透過 Microsoft Office Excel VBA 撰寫了一套介面 化的計算程式,以方便快速求得 、 值。
3.5.4 擺動期重力平衡系統設計 圖 3.6 擺動期重力平衡系統參數定義圖 另外考慮擺動期情況同樣建立一獨立的重力平衡系統,在不考慮摩擦力 的情況,以及機身加入僅上下移動而不左右傾倒的條件,以通過 O 點的水 平線為位能基準線,依圖 3.6 之參數定義,寫出此系統總位能: (3.17) 其中 h2’ h1’ h3’ h4’ d1 l1 d4 d2 l2 c1’ c2’ b2 b1 Mb d3 θ2 m2 m3 m4 O θ1 m1
將(3.11)、(3.12)式代入(3.17)式,得到: (3.18) 整理成 (3.19) 其中 令 、 ,此時位能與角度項無關,則可以達到重力平衡,故求 得: (3.20) (3.21) 同理,可以從(3.20)式與(3.21)式中,藉由假設 和 來求得擺動期的 及 。我們發現到此兩值未必為正值,有時因設計關係會出現負值情況, 代表固定位置在 O 點之下,這對於步行而言是較不方便的作法,可能面臨 碰觸到地面障礙物等問題,因此本設計以支撐的重力平衡為先優先考量, 後續再來探討擺動的情況。
3.6 省力設計方案 根據 3.5.3 節與 3.5.4 節的支撐與擺動狀態的重力平衡理論推導結果,我 們提出下圖 3.7 的兩種省力設計方案。 圖 3.7 兩種省力設計方案 第一個方案是假設兩彈簧 k 值,個別計算支撐與擺動期間的彈簧固定位 置 c 值,如果支撐期的擺動位置在機身所允許的高度範圍內,且擺動期的 固定位置不會過低,不會面臨到碰到障礙物問題的話,那麼我們便以滑動 機構,在支撐與擺動間作一次性的切換動作,來達到兩邊都達到重力平衡 省力條件。 第二個方案同樣假設兩彈簧 k 值,但是求得的擺動期彈簧固定位置 c 值 卻造成過低的情況,我們便優先選擇以支撐期的固定位置為考量,設計一 新型切換機構來將彈簧長度在擺動期間盡量縮短,使其拉伸力不會太大造 成關節扭矩,本研究將此方案當作一般性情況進行後續探討。 方案一 方案二
四、模擬與實驗結果
4.1 SolidWorks 2008 繪圖軟體介紹
本設計中所使用的 3D 工程繪圖軟體,是採用美國 Dassault Systemes SolidWorks Corporation 的 SolidWorks 2008。它可以支援多種 2D 和 3D 輔助 設計軟體所建立的文件類型,也可將建立的虛擬模型檔案轉存為其他檔案 類型,方便提供其他軟體利用。經歷多年發展,中間不斷與客戶意見討論 改進,讓它提供了非常人性化的操作介面。在建立虛擬模型的同時,除了 建立快速瀏覽的外觀外,也能指定零件的特性,如彈性、強度、密度等, 可以配合建立出的模型估算出實際成品的機械特性。 圖 4.1 SolidWorks 2008 軟體介面
軟體附加程式方面,分別包含 COSMOSXpress 與 COSMOSMotion 等, 藉由與 SolidWorks 整合的介面,使得建立後的零件與組合件可以快速的完 成應力、應變分析,以及機械運作模擬,節省在傳統設計流程中可能浪費 的時間與成本,提升了設計工作時的效率。 COSMOSMotion 為本研究模擬機構作動的主要工具,可以用來分析彈 力、阻尼、動力及摩擦力,並可將計算結果匯出成圖表或是.csv 檔格式,提 供比較數據之用途。 4.2 模擬軟體之驗證 在使用 SolidWorks 軟體進行本研究之前,最重要的是必頇驗證軟體的 可行性與正確性。本節將分成兩部份說明,第一部份先從四連桿三個位置 精確點解析法的理論透過 Microsoft Office Excel 2007 軟體作參數上的運算, 並透過軟體繪製組合件驗證其機構作動過程中不會造成問題。
第二部份首先以他人設計的重力平衡輔具為例,同樣透過軟體繪製出機 構組合件,並進入 COSMOSMotion 附加程式中加入彈簧,此彈簧係數值為 重力平衡系統公式計算結果,接著模擬計算一段指定動作過程的扭矩,探 討重力平衡之成效。
4.2.1 四連桿機構合成解析法之應用 圖 4.2 指定固定樞軸及其三個精確點位置座標(一格=1cm) 如圖 4.2 所示,假設現在需要設計一個四連桿機構,使其耦桿上之 P 點 依序通過 P1、P2與 P3之三個精確點, 與 分別是從第一個位置到第二個 及第三個位置的轉動角度, 與 為指定固定樞軸位置。 以下為已知條件(單位:㎜): 如圖 4.3,首先將 2.3.2 節最後推導的結果給予程式化,在此使用 Microsoft Office Excel 2007 軟體,輸入其各個方程式之公式,利用軟體可參 照位置數值的功能,一一將每個變數之關係作連結,最終只要將已知條件 輸入後,對於固定樞軸 的旋轉角 和 ,以及對於固定樞軸 的旋轉角
圖 4.3 四連桿運動生成解析法程式 接著,同樣利用 2.3.1 節的結果,將其運算步驟使用 Excel 程式化,即 求得左右迴路各別的矩陣元素,如下: 左邊迴路: (4.1) 右邊迴路: (4.2) 因此,利用(2.10)式,使用 Excel 的求反矩陣功能,兩邊同乘反矩陣, 得到(單位:㎜):
連桿 2 之長度為 ㎜ 連桿 4 之長度為 ㎜ 對照圖 2.9,可得到 之 X 與 Y 分量: ㎜ ㎜ 又連桿 3 之長度為 ㎜ 於是所有連桿長度均求出,至此完成尺寸合成的解析過程。 4.2.2 四連桿機構合成可行性之驗證 完成尺寸合成後,到軟體中繪製零組件並將其連桿長度尺寸參數輸入, 再組合成機構,為了瞭解合成出來的機構是否滿足原先設定的需求,就必 頇驗證其動作的可行性,在此使用 SolidWorks 2008 繪製零組件 圖 4.4 三個精確點位置之驗證 Y X P1 P2 P3 O2 O4 Link 3 Link 4 Link 2
如圖 4.4 所示為進行三個精確點位置之驗證,發現其連桿 3(耦桿)的 P 點的確依序通過其三個指定的位置,因此說明 SolidWorks 工程繪圖軟體可 以方便驗證此生成的四連桿機構能否達到預先所希望動作,否則就要回到 座標中定義新的參數重新計算尺寸,而 SolidWorks 可將尺寸參數化,對於 修改零件是相當快速方便的。 4.2.3 重力平衡系統之應用範例 採用 Agrawal、Fattah 與 Banala 等人[29]的兩個自由度連桿之重力平衡 系統輔具設計,首先任意繪製兩連桿,並設定其材質,本範例使用材質為 AISI 304 不鏽鋼。 首先第一步要找出兩連桿的總質心,方式是利用軟體中評估零件物質特 性的功能,可以很準確迅速得知系統的總質量與質心座標位置,因此不必 從數學推導計算質心位置的方式來求,圖 4.5 中右方視窗清楚列出本系統二 連桿總質量 M 為 1233.16 公克與其 XY 座標值。
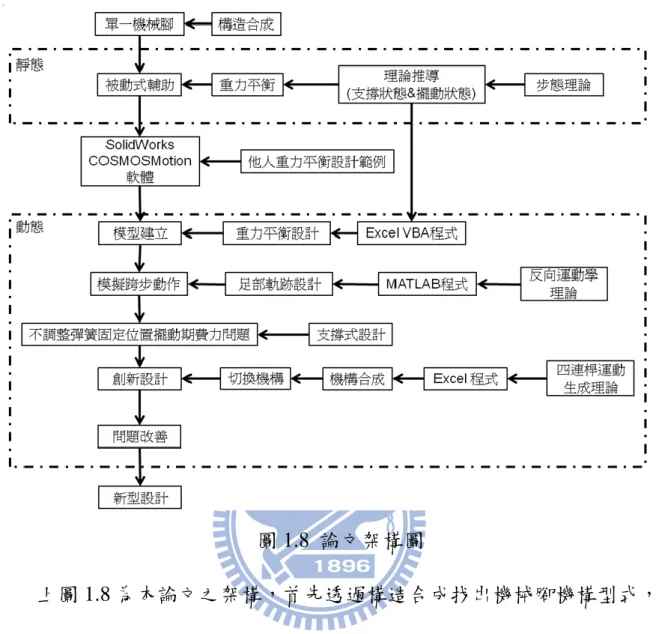
圖 4.5 平行四邊形機構及兩連桿之質心位置 圖 4.6 平行四邊形機構及兩連桿之質心位置
d
1d
2s
1M
Joint 1
Joint 2
接著再從系統總質心處,延伸兩連桿生成一平行四邊形機構,其繪製總 組合如圖 4.6 所示,於是得知: ㎜ ㎜ , ㎜ 代入(2.36)式即可求得其滿足此機構重力平衡之兩彈簧的彈性係數為: ㎜ ㎜ 4.2.4 重力平衡系統之驗證範例 利用 SolidWorks 中的 COSMOSMotion 模組來進行動態模擬,設定已求 得的彈性係數與重力條件,給定在 0~10 秒鐘,設定接頭 1 逆時針固定旋轉 速度為 0.5 RPM,接頭 2 順時針為 1 RPM,即圖 4.7 從形態一至形態二過程, 接頭 1 旋轉 30°,接頭 2 旋轉 60°,分析抬腿過程的扭矩作比較,圖 4.8 和 4.9 為未加彈簧與置入彈簧後的扭矩變化之比較。 圖 4.7 模擬動作示意圖 Joint 1 Joint 2 形態一 形態二 0~10s
(A) (B) 圖 4.8 Joint 1 之扭矩變化(A)無彈簧(B)有彈簧 (A) (B) 圖 4.9 Joint 2 之扭矩變化(A)無彈簧(B)有彈簧
本測詴目的是設定機構某指定動作,找出關節為了維持此動作形態頇抵 抗重力造成的扭矩負荷。使用 COSMOSMotion 圖表分析功能可快速得出扭 矩在 Z 方向對時間的圖,所需扭矩根據右手定則為逆時針則為正,反之為 負。從圖 4.8 與圖 4.9 扭矩的數據中,模擬發現配置彈簧後兩接頭的扭矩均 有大幅降低,然而理論上其扭矩值應為零,因達到靜止不動時,接頭處由 於彈簧的拉伸輔助,故不會有任何負荷。 探討其誤差來源可能有以下三點: 1. 由於本模擬旋轉速度為等速運動,而重力平衡卻是探討靜態時的穩 定,因此判斷當設定作動時間越長,速度則越慢,其結果應越趨近 於對靜態時的扭矩值,也就是趨近無頇扭矩的理論值。 2. 評估質心點位置座標值經軟體計算後會自動四捨五入,造成其與質 心位置有關的長度 d2與 s1值的誤差,因此導致計算達到重力平衡條 件的彈性係數亦不是百分之百精確。 3. 同樣是精確度問題,設定彈性係數時,於設定欄位輸入的彈性係數 值因精確度問題,因此可能造成些許誤差。 上述說明可能誤差來源中,為了瞭解第一點判斷正確與否,底下針對這 部份另外作了兩個動作相同,但將旋轉速度減慢的模擬測詴: 測詴一:速度減為原本的 ,時間拉長為兩倍,扭矩結果如圖 4.10:
(A) (B) 圖 4.10 重力平衡減速測詴一之扭矩變化(A)Joint 1 (B)Joint 2 測詴二:速度減為原本的 ,時間拉長為四倍,扭矩結果如圖 4.11: (A) (B) 圖 4.11 重力平衡減速測詴二之扭矩變化(A)Joint 1 (B)Joint 2
圖 4.12 比較重力平衡於不同速度下 Joint 2 之扭矩 在速度慢的條件下,兩測詴扭矩值在接頭 1 幾乎為降為 0,而接頭 2 從 圖 4.12 之比較得知,若只看取絕對值後的量值大小,在速度越慢的情況則 越趨近於扭矩為 0 的軸線,證實本模擬若速度在越慢的條件下,則越趨近 於重力平衡理論考量的靜態情況。 本實驗對重力平衡理論作一個軟體分析上的應用,從上述分析可以觀察 出其趨勢有著明顯地變化,故得知本重力平衡機構確實具有降低扭矩的省 力效果,雖然不是完美的重力平衡系統。但可以說明 SolidWorks 軟體的 COSMOSMotion 模組是一個對於驗證重力平衡系統在動態的模擬環境下是 良好使用工具。 -0.09 -0.08 -0.07 -0.06 -0.05 -0.04 -0.03 -0.02 -0.01 0 0 5 10 15 20 25 30 35 40 45 扭矩 -Z (newton -mm) 時間 (sec) 原始模擬 1/2速度 1/4速度
4.3 重力平衡系統介面化程式
為了方便計算,以 3.5.3 節推導的單一機器腳支撐期重力平衡系統公式 結果,使用 Microsoft Office Excel 2007 VBA 進行程式撰寫,圖 4.13 為軟體 工作介面圖,圖 4.13 中間區域為表單介面設計之工作視窗,右半邊視窗為 程式碼撰寫區。圖 4.14 為完成的介面化程式,只要在對應參數欄位輸入各 個參數值,並且假設兩個彈簧的 k 值,按下計算按鈕便可求得彈簧固定位 置的值了。 有時會因假設之 k 值錯誤,造成彈簧固定位置超出機構設計允許的範圍, 這時就必頇重新假設新的 k 值重新計算來調整,直到尺寸合理化,使固定 位置在允許範圍內。
![圖 1.1 體重支撐型的步行輔具[5]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8258993.172032/19.892.363.575.219.491/圖11體重支撐型的步行輔具5.webp)
![圖 1.3A 是 1991 年由 Dick 與 Edwards[12]兩人合作發明一套雙足的移動 裝置,命名為―SpringWalker‖,其主要框架固定於使用者背部,並利用萬向 接頭銜接到下方的框架,使用者的雙腳固定在其下部框架,因此雙腳不與 地面接觸,當腳步開始伸展帶動連桿機構牽引纜繩而拉伸主要彈簧,而儲 存的彈性位能接著轉換成支撐身體的力量,達到使用者只需花費些微力量 就可輕鬆跳躍的目的,圖 1.3B 是跳躍情況的連續動作圖。 (A)](https://thumb-ap.123doks.com/thumbv2/9libinfo/8258993.172032/21.892.145.807.503.924/明一套雙足到下方桿機構牽引纜繩而拉伸主要彈簧而儲存的位能A.webp)
![圖 1.4 Arakelian 與 Ghazaryan 之重力平衡式復健輔具[13]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8258993.172032/22.892.208.745.324.736/圖14Arakelian與Ghazaryan之重力平衡式復健輔具13.webp)
![圖 1.5 Agrawal 等人之重力平衡式輔具設計[14] 類似還有本實驗室過去由宋志元[15]所研究的設計,以 Honda Leg 為參 考加入 TRIZ 創新理論,設計了一個創新的重力平衡式步行輔助雙足機構系 統,用來幫助殘障人士與老年人,使其可以維持正常的步行活動,並與前 述 Agrawal 等人之設計做比較,為重力平衡式輔具提供了一個新概念。 圖 1.6 宋志元之重力平衡式助行輔具設計[15] 另外在機器人的設計中,如 Shin 和 Streit[16]在 1993 年針對四足機器人 的腿部](https://thumb-ap.123doks.com/thumbv2/9libinfo/8258993.172032/23.892.392.545.106.380/了一個創新以維步行活動並與述等人之設計做了一個新另外在腿部.webp)
![圖 2.6 創意性機構設計流程圖[23]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8258993.172032/31.892.163.774.427.1073/圖26創意性機構設計流程圖23.webp)
![圖 2.9 指定固定樞軸的三個位置合成之解析[24]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8258993.172032/41.892.188.753.322.1022/圖29指定固定樞軸的三個位置合成之解析24.webp)
![圖 2.12 滑輪式的彈簧配置表示圖[28] 根據 Agrawal 於參考文獻[29]中探討兩個自由度的重力平衡系統,其系 統如下圖 2.13 所示: 圖 2.13 兩個自由度之連桿重力平衡系統[29] 其中 COM(Center of Mass)表示為兩連桿系統質心位置,其值為兩連桿 質量相加,而從此質心處再延伸出兩連桿形成一平行四邊形機構,假設新 增兩連桿之質量可忽略,則根據其幾何關係可知:](https://thumb-ap.123doks.com/thumbv2/9libinfo/8258993.172032/47.892.363.579.122.332/滑輪式自由度系統質置其值為兩連質量相加而從此質成一平行可知.webp)