國立交通大學
機械工程學系
碩士論文
力回饋壓電加速規即時控制系統
A Piezoelectric Accelerometer With
Force Balance Control
研究生:彭浩源
指導教授:陳宗麟 教授
力 回 饋 壓 電 加 速 規 即 時 控 制 系 統
A Piezoelectric Accelerometer With
Force Balance Control
研 究 生:彭浩源 Student:Hao-Yuan Peng
指導教授:陳宗麟 博士 Advisor:Dr. Tsung-Lin Chen
國立交通大學
機械工程學系
碩士論文
A Thesis
Submitted to Department of Mechanical Engineering National Chiao Tung University
in partial Fulfillment of the Requirements for the Degree of
Master in
Mechanical Engineering October 2010
Hsinchu, Taiwan, Republic of China
I
力回饋壓電加速規即時控制系統
研究生:彭浩源 指導教授:陳宗麟 博士
國立交通大學機械工程學系
中文摘要 本論主要設計及製作一壓電加速規,推導其電壓/加速度驅動、電壓 輸出的完整數學模型,並建構一實驗平台,根據力平衡控制法設計控制 器,進行壓電加速規的回饋控制。 在壓電加速規的機械結構部分,本文製作出形狀簡單的三層複合式壓 電懸臂樑,此懸臂梁具有感測及驅動能力。在數學模型建立的部分,我們 以壓電力學進行動態模型的理論推導,並比較數值模擬軟體 ANSYS 的模擬 結果及實驗使用都普勒量測儀(Laser Doppler Velocity)的量測結果。理 論推導、數值模擬、實驗數據三者結果大致相符。 力平衡控制法乃是利用回授控制產生一平衡力,使得懸臂樑在受到外 力(加速度)的狀況下仍能維持不動,藉由所產稱的平衡力來推算待感測 的加速度。因此在力平衡控制的實驗部分,我們首先對壓電加速規做系統 鑑別,再利用 MatLab 對所設計的 P 及 PI 控制器進行模擬。最後利用 C-code 與 DSP 來實現系統的即時回授控制。模擬及實驗結果顯示,本文成功的改 善此壓電加速規的低頻響應,並增加感測頻寬 40Hz。 本論文完成一力平衡加速規的設計、製作、數學模型推導。由於時間 限制,僅能針對力平衡加速規的性能響應進行初步的探討。許多的研究項 目列於「未來工作」中,繼續探討。II
A Piezoelectric Accelerometer With
Force Balance Control
Student: Hao-yuan Peng Advisor: Dr. Tsung-Lin Chen
Department of Mechanical Engineering
National Chiao Tung University
Abstract
This thesis presents a design, modeling, and control of a piezoelectric accelerometer. The fabricated piezoelectric accelerometer features built-in sensor and actuator so that it can perform the force-balance measurement when feedback control applies. The fabricated accelerometer was well calibrated. The calibration methods and a complete setup for the force-balance feedback controls are also presented in this thesis.
This piezoelectric accelerometer is designed to be a sandwich-structure cantilever beam with piezoelectric materials on the top and bottom, and a copper layer in the middle. The piezoelectric layer on the top and bottom are divided into two sections: one for actuation and one for sensing. The top and bottom piezoelectric layers form a bi-morph structure. Meaning that, this accelerometer uses a bi-morph piezoelectric structure to bend the copper layer, and a bi-morph piezoelectric structure to sense the deflection of the cantilever beam.
A theoretical model is derived to describe the dynamic behaviors of this voltage-in/acceleration-in and voltage-out accelerometer. To verify the feasibility of this model, not only did finite element simulations, but also experimentally data were obtained using the Laser Doppler Vibrometer. The results from the theoretical model, FEM simulations, and experimental data are consistent with each other. To experiment on a force-balance control piezoelectric accelerometer, we first did the
III
system identification to obtain system model. Secondly, we verified simple P and PI controllers using MatLab tools. Lastly, this controller was implemented using C-codes on a DSP platform. The simulation results and experimental results show that the proposed force-balance control can increase the system bandwidth by 40Hz, especially in improving the low frequency response.
This thesis completes the design, fabrication, and modeling of a force-balance piezoelectric accelerometer. However, due to time limitation, only some preliminary results were obtained for the force-balance control. More research items are listed in the future work.
IV
致謝
自小時來看,能夠由碩士班畢業,若沒有周遭的大家,今日
這一點點的成績也不足以和我匹配。
而這段路途中,對我有過幫助、指導、讓我任性又或批評我
的各位朋友及先進,真的很感激你們。由於族繁不及備載,容我
不列出各位的姓名僅以大方向做為感謝對象,感謝花蓮高工,在
這裡我得到了該有的自信,面對各種挑戰,這裡的教導讓我懂得
去面對。感謝台灣師範大學,給了我機會,讓我能夠出任教學一
職,得到了我喜愛的興趣。感謝交通大學,這裡我學到了專業的
知識,統整過去的理論並且實現。感謝上帝,讓我的生活上有照
顧我的家人、朋友,而你們所帶給我的好,不是在這致謝裡面所
可以用文字來做為適當的形容,很開心有你們對我的付出,真的
很愛你們。
V
目錄
中文摘要
...I英文摘要
... II致謝
... III圖目錄
...VII表目錄
...IX一、 緒論
1.1 前言...1 1.2 研究動機與文獻回顧...3 1.3 研究目標...5 1.4 論文架構...6二、 壓電加速規原理
2.1 壓電材料理論...7 2.2 壓電加速規理論...15三、模型建構與控制系統設計
3.1 壓電加速規系統...18 3.1.1 壓電加速規機械系統...19 3.1.2 壓電加速規機械系統的運動分析...20 3.1.3 壓電加速規機械系統的轉移函數...27 3.1.4 ANSYS 模擬與實驗 ...29 3.1.5 結果與討論...36VI
四、控制理論模擬及實驗
4.1 壓電加速規系統控制器設計...37 4.1.1 MATLAB 模擬控制器設計的結果 ... 41 4.2 實驗流程及硬體架構 ...51 4.2.1 實驗流程 ... 51 4.2.2 硬體架構 ... 52 4.3 壓電加速規控制實驗結果 ...53 4.3.1 結果與討論 ... 58五、結論與未來計畫
5.1 結論 ...59 5.2 未來計畫 ...60VII
圖目錄
圖 1.1 全球手機及智慧型手機所使用各類型 MEMS 出貨市場……… 2 圖 1.2 2007-2013 微機電加速規及陀螺儀市場預估 ……… 3 圖 1.3 具驅動與感測的壓電加速規……… 5 圖 2.1 壓電材料機電轉換說明圖。(a)正壓電效應,(b)逆壓電效應 … 8 圖 2.2 加速規物理模型……… ……… 15 圖 2.3 壓電加速規物理模形 ……… 16 圖 3.1 壓電加速規機械系統 ……… ……… 18 圖 3.2 力回饋壓電加速規系統方塊圖……… ……… 19 圖 3.3 壓電加速規機械系統方塊圖……… ……… 20 圖 3.4 壓電加速規機械系統側向彎曲運動示意圖……… 20 圖 3.5 壓電加速規感測端等效電路… ……… 27 圖 3.6 模態分析模 結果……… 30 圖 3.7 感測端電位移簡諧分析,理論解析解(實線)與模擬值(虛線)比較 30 圖 3.8 驅動端電位移簡諧分析,理論解析解(實線)與模擬值(虛線)比較 30 圖 3.9 感測端位移簡諧分析,理論解析解(實線)與模擬值(虛線)比較 31 圖 3.10 驅動端位移簡諧分析,理論解析解(實線)與模擬值(虛線)比較 31 圖 3.11 壓電加速規實驗結構……… 32 圖 3.12 壓電加速規 ANSYS 模擬結構 ……… 32 圖 3.13a 壓電加速規驅動端位移大小圖……… 33 圖 3.13b 壓電加速規驅動端位移相位圖……… 33 圖 3.14a 壓電加速規感測端位移大小圖……… 34 圖 3.14b 壓電加速規感測端相位圖……… 34 圖 3.15 壓電加速規實驗波德圖……… 35 圖 4.1 力平衡作用過示意圖……… 38 圖 4.2 系統閉迴路方塊圖 ………39 圖 4.3 壓電加速規開路及加入 P 控制器後的迴路增溢轉移函數波德圖 41 圖 4.4 F s( ) / ( )A s 、VO/ ( )A s 轉移函數波德圖 P 控制器 ……… 42 圖 4.5 壓電加速規開路及加入 P 控制器後的迴路增溢轉移函數波德圖 43VIII 圖 4.6 F s( ) / ( )A s、VO/ ( )A s 轉移函數波德圖 PI 控制器 ………43 圖 4.7 F s( ) / ( )A s 轉移函數波德圖 PI、P 控制器比較……… 44 圖 4.8 P 控制壓電加速規感測端電壓大小………45 圖 4.9 P 控制機械系統繞曲大小 ……… 46 圖 4.10 P 控制回授電壓大小……… 46 圖 4.11 P 控制輸入加速度(虛線線段)與回授力(實線線段)比較……… 47 圖 4.12 PI 控制壓電加速規感測端電壓大小 ……… 48 圖 4.13 PI 控制機械系統繞曲大小………48 圖 4.14 PI 控制回授電壓大小 ……… 49 圖 4.15 PI 控制輸入加速度與回授力比較………49 圖 4.16 實驗流程方塊……… 51 圖 4.17 實驗設備圖……… 52 圖 4.18 P 控制時開迴路感測端的輸出電壓 ………53 圖 4.19 P 控制時開迴路控制電壓………54 圖 4.20 P 控制時閉迴路感測端的電壓 ………54 圖 4.21 P 控制時閉迴路控制電壓 ………55 圖 4.22 P 控制回授力與加速度的估測 ………55 圖 4.23 PI 控制時開迴路感測端的輸出電壓 ……… 56 圖 4.24 PI 控制時開迴路控制電壓……… 56 圖 4.25 PI 控制時閉迴路感測端的電壓………57 圖 4.26 P 控制時閉迴路感測端的電壓 ………57 圖 4.27 PI 控制回授力與加速度的估測………58
IX
表目錄
表(2.1) PZT-5 壓電陶瓷參數 ... 11 表(2.2) 不同結構對應參數 ... 13 表(2.3) 壓電加速規受力模型及特徵 ... 17 表(3.1) 壓電加速規機械系統尺寸 ... 291
第一章 緒論
1.1 前言 加速規(Accelerometer)是藉著量測加速度來獲得物體受力程度的慣 性感測器(Inertial Sensor),其應用的領域如: 偵測、監控等。在飛彈或 航空器的加速運動監測、汽車產業的安全氣囊、安全帶等智慧型汽車等, 皆為加速規所應用之產業。隨著微機電 MEMS(Micro Electro-Mechanical Systems)製程的進步, 過去因技術與經濟原因,使得微型感測器(Microsensors)主要侷限汽車產 業中的情況已不復見。而加速規在機械結構尺寸縮小,且可大量製造,使 其成本大大的降低。微機電式加速規(MEMS Accelerometer)於可攜式消費 性電子領域中,自2007 年起逐年強勁成長,應用於電玩控制器 Wii、高階 智慧型手機如 HTC、i-Phone、MP3 播放機、數位相機、筆電、電子書閱讀 器等電子產品中。而 MEMS 相關元件在智慧型手機應用中,至 2012 年市場 預期將達 13 億美金見圖(1.1),其中內建加速規與陀螺儀將成主流,自 2009 年 1 月以來,80%在的新手機中整合加速規,使其具有先進計步、智慧螢 幕、3D 定位、智慧響鈴、空中操作滑鼠(Air Mouse)結合無線遙控、遊戲、 相機光學防手震及室內定位服務等功能於一身。使人與娛樂性電子產品的 互動大大提升,未來消費者對人機介面的要求將提高,加速規的使用頻率 必然隨之增加。
2 由此,在市場上占有相當重要商業地位的微機電慣性感測器,2008 年 全世界在加速規與陀螺儀的兩類別中,產量達 7 億 5 千兩百萬顆,總價值 18 億美金,至 2013 年預估達 30 億美元的成長如圖(1.2)。目前微機電慣 性感測器的市場仍是以在汽車市場應用為主,但預計在 2011 年消費性電 子應用將成為該市場的主流。 全球手機及智慧型手機所使用各類型 MEMS 出貨市場(來源 iSuppli) 圖(1.1)
3
2007-2013 微機電加速規及陀螺儀市場預估(來源 iSuppli) 圖(1.2)
1.2 研究動機與文獻回顧
目前,微機 電 式加速規根據不同 的能量轉換機制可 以分為 :電容 (Capatitive) , 壓 阻 (Piezoresistive) , 共 振 (Resonant) , 穿 隧 電 流 (Tunneling),熱感應(Thermal)與壓電(Piezoelectric)的各種感測方式 [1]-[6]。不同的換能感測型式皆有其優點及限制,而壓電材料因變形可 產生高輸出電壓或高電荷密度、響應速度快、輸出力大、相對環境靈敏度 低等優點,使得壓電加速規相較於其他換能型式之加速規,具有動態特性 極佳、量測的範圍及頻寬高、輸出訊號大且相較為線性,並有著低成本、 結構簡單、容易與電子電路整合等優點。在各種壓電材料中,PZT 提供高 感測靈敏度,因此被本文加速規設計所使用之。 本文的壓電加速規結構的為壓電片與彈性材料組成的三層式壓電複 合懸臂樑(Bimorph Configurations)。該結構在過去幾年中,其理論及實
4 驗等相關研究,有著大量的討論,在[7]提出該結構再多種機械及電氣的 邊界條件下的機電特性,但並無建立有關力轉電壓的方程式。而[8]分析 由電壓驅動結構,沿懸臂樑固定端到自由端所產生的繞曲並做實驗驗證, 其所提出方向為致動器的範疇。[9]以有線元素分析法(Finite Element Method)分析該研究提出致動及感測的新結構,並且計算三層式壓電複合 懸臂樑結構的靜態響應,該研究並無討論實驗部分。[10]建立三層式壓電 複合懸臂樑在懸臂樑的自由端加入質量塊,在不同的極化方向下,結構產 生縱向和旋轉位移的穩態電壓、震動響應的理論推導及實驗。 而懸臂樑或板結構,在 MEMS 領域中極為常見,且相較於其它結構, 懸臂樑在彎曲時,橫軸會產生較大的彎曲應變。此對三層式壓電複合懸臂 樑而言,壓電材料在較大的應變中可以產生較大的能量轉換。 在加速規控制部分,本文為能達到加速度估測的目的,在微力感測相 關的研究加以著墨,而懸臂樑在此亦為最常使用的於該研究的結構,這是 因為懸臂樑結構能夠感測到微小位移之故,使得懸臂樑為感測微力或微應 力的理想結構[11]。懸臂樑式感測器,在操作過程中常發生兩種困難。第 一,懸臂樑式感測器為彈性結構,要精確的用來做為微工具(Microtool) 有較大的困難性,第二,微型懸臂樑保持在高精確度的動態範圍較小。因 著這些限制,力平衡(Force Balancing)或主動式力感測(Active Force Sensing)法已被廣泛的使用於其中,主要的討論常見於加速規的設計 [14][15]。力平衡法可以達到不影響感測器的材料性質、增加系統的剛性 (Stiffness)且不使感測器的感測力降低,大部分的主動式感測器以發展 純熟,至今相關研究已達力感測在微牛頓力的範圍。 根據上述,本文欲整合壓電加速規的完整的理論及實驗架構,採用較 大的尺寸,設計一簡單的三層式複合懸臂樑來進行分析,在此結構中具有 驅動及感測端,來作為壓電加速規的機械結構,並建立該結構的理論模
5 型,分析結構的電壓及震動響應。實驗部分,對壓電加速規進行系統鑑別 (System Identification),得到系統的轉移函數,利用力平衡法設計回 授控制器,來達到估測輸入加速度的目的。 1.3 研究目標 本文欲經由研究壓電材料特性及結構模擬,設計並製作出壓電式加速 規,該結構的大小為 70x62x1.68mm,如圖(1.3)。其中為了便於分析,驅 動器亦採用與感測器相同的結構。為達到力平衡控制,加速規因外部的加 速度使懸臂樑的結構產生繞曲(Bending),在設計驅動端與感測端的距離 相對的靠近,使得驅動端在第一模態前的低頻運動與感測端具有相對高的 一致性運動位移。最後實現力平衡控制,設計適合本文壓電加速規控制 器,來達到力平衡的加速度估測,將結構與控制部分整合,提供未來在主 動式微小化感測器的前導。 d f b c e a 1 x 2
x
3 x polarization d f b c e a 1 x 2x
3 x polarization 具驅動與感測的壓電加速規 圖(1.3) sensing driving driving6 1.4 論文架構 以下是本文的組織架構: 第一章, 介紹研究動機並回顧過去壓電懸臂樑結構及相關的控制理 論。 第二章, 介紹壓電理論及壓電加速規原理。 第三章, 對本文所設計之壓電加速規進行理論的模型建構,並透過 ANSYS 模擬及實驗量測分析機械結構。 第四章, 對本文的壓電加速規建立控制理論及模擬設計控制器,於實 驗中,利用 DSP 實現控制器,做閉迴路控制。 第五章, 總結以上討論。
7
第二章 壓電加速規原理
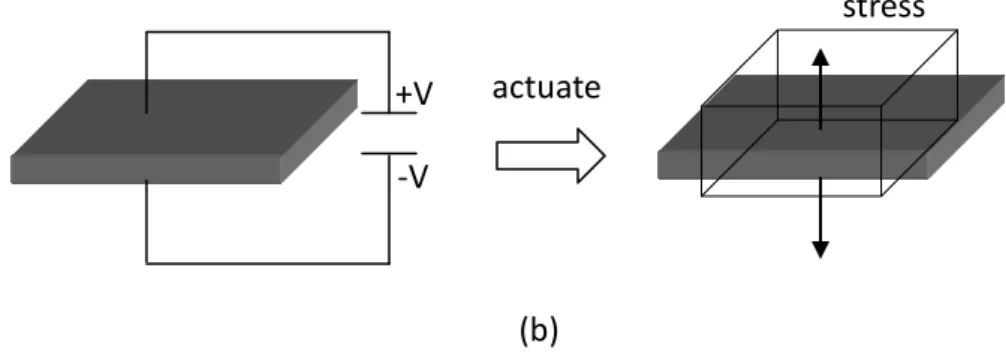
2.1 壓電材料理論 壓電效應是電能及機械能互換的現象,此種現象最早是在 1880 年居 禮兄弟發現石英在受到機械力作用後會產生表面電荷,且發現對石英施予 不同方向的力或做不同方向的切割會產生不同的壓電效應,之後於 1881 年居禮兄弟並利用 Lippmann 的熱力學理論證實外加電場也可以造成壓電 晶體產生機械形變,而證實了壓電特性也具備逆效應。由此可知,壓電特 性為電與力的綜合作用之ㄧ,若我們對壓電材料施加應力,其表面會產生 電荷,此稱為正壓電效應如圖 2.1(a);反之若加電場於壓電材料,則會衍 生機械變形,,此稱為逆壓電效應如圖 2.1(b),此兩種現象合稱壓電效應 (Piezoelectric Effect),1917 年利用石英製成水下偵測器為壓電材料最 早的實際應用,1920 年代鑒於天然壓電材料的取得與加工不易,以及壓電 應變常數或壓電電壓常數過低的原因,科學家紛紛投入研發人工合成的壓 電材料,至此之後壓電材料的發展與應用成為不可或缺的重要科技與技術 之ㄧ。 V sensor stress (a)8
圖 2.1 壓電材料機電轉換說明圖。(a)正壓電效應,(b)逆壓電效應
壓電材料的種類繁多,使用七大晶系及三十二點群加以說明,其中七 大 晶 系 包 括 三 斜 (triclinic) , 單 斜 (monoclinic) , 斜 方 (orthorhhombic) , 四 方 (tetragonal) , 三 方 (trigonal) , 六 方 (hexagonal),立方(cubic)等晶系,而群點是依旋轉、反轉、鏡射及其組 合等,以分類結晶的對稱性,若一材料之晶體結構與該材料是否具有壓電 性具有直接的關係。當該材料具有中心對稱性(Center of symmetry)時, 該材料不具有壓電性,反之在非中心對稱點群中,除了 432 點群以外,其 他二十個點群的材料都具有壓電效應,而目前應用極廣亦的壓電陶瓷材料 (PZT)則屬於六方晶系(Hexagonal crystal system)6mm 點群。
壓電陶瓷是經由高溫燒結晶粒成長,在經極化處理(Polarization), 極化過的壓電陶瓷,就如同單晶體般,具方向性。壓電的另一重要物理特 性為介電效應(Dielectric Effect)。所謂介電效應是只壓電材料於電極 層施以外加電場時,壓電材料內部的正負電荷載體因為受到電場作用產生 位移,因而形成電偶極而導致極化或分極的現象稱之,其一般特性是在電 場或機械應力下將產生線性響應。 壓電材料之壓電交互關係,可由 Helmholtz 自由能或 Gibbs 自由能方 程式推導出常見的四種交互關係式來說明力學、電學與機電耦合時的狀態 及其轉換規則。忽略材料受到磁與熱效應(Magnetic and thermal effect)
actuate r stress +V -V (b)
9 及遲滯(Hysteresis)的情況下,壓電材料之線性組成方程式可以表示為以 下四組: d-form: 66 66 61 61 63 31 31 36 61 31 ( , ) ( , ) E T S T E s T d E D T E d T E e-form: 66 61 61 63 31 31 36 61 33 31 ( , ) ( , ) E S T S E c S e E D S E e S E g-form: 61 66 61 63 31 31 36 61 33 31 ( , ) ( , ) D T S T D s T g D E T D g T D h-form 61 66 61 63 31 31 36 61 33 31 ( , ) ( , ) D S T S D c S h D E S D h S D ) 1 ( d2 E D k s s 、 T T 1 、g dT 、C sE E 1 其中 T、S、E、D、d、g、h、 2 d k 、e 分別為應力、應變、電場、電位 移、壓電應變/電荷常數、壓電應變/電壓常數、壓電應力/電壓常數、機 電耦合常數、壓電應力/電荷常數,而具上標符號的係數如 E s 分別代表獨 立變數E固定時,測得函數S與獨立變數 T的柔性常數,故 D s 、T、T、 1 [S][S] ( 2.1) (2.2 ) (2.5 ) ( 2.6) (2.3 ) ( 2.4) (2.7 ) (2.8 ) 2 2 1 (1 ) d d hk d k
10 1 11 12 13 31 2 12 11 13 31 3 13 13 33 33 4 44 15 5 44 15 6 66 1 15 11 2 15 11 3 31 31 33 33 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 E E E E E E E E E E E E S S S T c c c e T c c c e T c c c e T c e T c e T c D e D e D e e e 1 1 1 1 1 1 1 1 1 S S S S S S E E E S 、 E c 分別為定常電位移之柔性常數、定常應力介電常數、定常應力反 介電常數、定常應變反介電常數、定電場剛性常數。 由觀察以上所得之壓電材料之交互關係式,我們可以發現:當壓電常 數為零時,組成關係式即可簡化為兩個獨立方程式,即虎克定律及介電方 程式。 定電場剛性常數矩陣 E c 至多有 21 個獨立常數,而壓電應力/電荷常數 e 有 18 個,介電常數S有 6 個,因此對壓電材料而言,要正確描述其行 為,需要 45 個材料常數,但由於大部分的壓電材料都具有某些對稱性, 因此不會有如此多的獨立常數,以壓電陶瓷且極化方向為x3方向為例,其 組成關係式以矩陣方式可表為: ( 2.9) 由(2.9)式可以了解:只需要六個剛性常數,三個壓電應力/電荷常 數,兩個定常應變反介電常數,共十個獨立常數,就可決定壓電陶瓷的特 性,此材料亦為本文所使用之壓電材料。其中,各參數數值於表 2.1
11 表 2.1 PZT-5 壓電陶瓷參數 材料參數 數值 31 d E 11 S 31 2 d k T 33 12 171 10 m V 12 1 16.4 10 pa 0.34 12 1700 8.854 10 F m 完整的壓電理論,除了壓電交互關係式以外,亦需要其他輔助方程 式,即:
運動方程式(stress equation of motion)
直角座標系: 2 6 5 1 2 T T T u x y z t (2.10) 2 6 2 4 2 T T T v x y z t (2.11) 2 5 4 3 2 T T T w x y z t (2.12) 圓柱座標系: 2 6 5 1 1 2 2 1 T T T T T u r r z r t (2.13) 2 6 2 4 6 2 2 1 T T T T v r r z r t (2.14)
12 2 5 4 3 2 1 T T T w r r z t (2.15) 球座標系: 2 6 5 1 2 3 6 1 2 2 cot 1 1 sin T T T T T T T u r r r r t (2.16) 2 6 2 4 1 2 6 2 ( ) cot 3 1 1 sin T T T T T T v r r r r t (2.17) 2 5 4 3 5 4 2 3 2 cot 1 1 sin T T T T T w r r r r t (2.18) 代表結構密度,u、v、w 代表不同方向的位移。上述各座標系運動 方程式,是足以描述一搬物件的運動狀態。 應變-位移關係式(strain-displacement relation) 6 ~ 1 3 0 S x k p SP P ,p , 0 P S 為薄膜應變、kp為彎曲應變 0 P S 薄膜應變為: 0 1 1 1 1 1 2 2 1 1 S u v A w A A A R (2.19) 0 2 2 2 2 1 2 1 2 1 S u v A w A A A R (2.20) 0 3 3 S w x (2.21) 0 4 2 3 2 2 2 1 S A v w x A A (2.22) 0 5 1 3 1 1 1 1 S A v w x A A (2.23)
13 0 1 2 6 2 2 2 1 1 2 S A u A v A x A A A (2.24) p k 彎曲應變為: 1 2 1 1 1 1 1 2 2 1 A k A A A (2.25) 2 1 2 2 2 2 1 2 1 1 A k A A A (2.26) 3 0 k (2.27) 2 2 4 2 3 3 2 k A x x A (2.28) 1 1 5 1 3 3 1 k A x x A (2.29) 1 1 2 2 6 2 2 1 1 1 2 A A k A A A A (2.30) 其中A1、A2為拉梅常數,與幾何形狀有關,因此不同的結構對應的參 數亦不相同,其基本形式的參數如表 2.2 表 2.2 不同結構對應參數 結構 A1 A2 d1 d1 R1 R2 拱型結構 1 1 ds dy RS 圓環結構 1 1 dx Rd R 梁或桿 1 0 dx 0 方型平板 1 1 dx dy 圓柱薄殼 1 R dx d R 圓形平板 1 r dr d
14 3 3 2 2 1 1 3 2 1 1 1 1 A A A E E E 其中 為電位 (2.31)
準靜電方程式(charge equation of electrostatics)
2 3 1 2 2 1 1 1 2 1 1 2 2 3 1 0 I i i I D D D A D A A A A A A x
(2.32) 如果壓電材料在縱向塗佈電極獲施加電場,則(2.32)式可簡化為。 3 3 0 D x ( 2.33) 因 此 由 式 (2.1)-(2.8) , (2.10)-(2.12) , (2.19)-(2.30) , (2.31)-(2.32)等,總共 23 個方程式,配合邊界條件,便可解出T、S、E、 D、u、v、w等 23 個未知數。 由這些方程式來求得壓電材料的理論解,大多非常繁雜且在解析的求 解上實為困難,因此常利用某些假設將問題加以簡化,並利用數值計算方 法來加以探討。15 2.3 壓電加速規理論 首先,簡單的說明加速規的感測原理。以簡單的質量 M、阻尼 C、彈 簧 K 系統如圖 2.2,來描述加速規結構。其操作原理可用簡單質量塊的位 移來表示,當外界有加速度時,質量塊會應慣性力的作用產生相對位移, 透過材料特性(如:壓電材料)或機電整合技術,將此位移量轉變為電阻或 電容的變化量,最後搭配相對應的電路將訊號轉變為電壓訊號作為輸出; 故此,一基本加速規應包含機械結構及感測電路。 如圖 2.2,當外界產生 的位移量時,質量塊會因慣性力的作用產生 y 位移,其運動方程式為: 2 2 ( ) ( ) 0 d y dy d M D K y dt dt dt (2.34) 又令y z x,可得: 2 2 2 2 ( ) d x dx d M D Kx M Ma t dt dt dt (2.35) 對式( 2.35)取拉氏轉換(Laplaec transform)可表為: 2 ( ) 1 ( ) x s Ma s Ms DsK (2.36) M C K 圖 2.2 加速規物理模型 y
16 voltage spring mass piezo voltage spring mass piezo 由上式可知,系統參數若為已知,透過位移量的量測即可得到相對應 加速度的大小。 同於加速規的概念,壓電加速規為利用壓電材料的壓電效應,來量測 機械變數的動態變化量如:加速度等。圖 2.3 當一加速度施加在質量塊上, 壓電材料因質量塊施力後產生變形,根據壓電效應此時可得一輸出電壓, 後端再藉由讀取電路將電壓的數值讀出。根據該輸出訊號,我們可得到加 速規因外力而造成壓電材料的變形量,經由數學換算來得到輸入的加速 度,達到加速度估測之目的。 而壓電加速規依壓電材料受力方式又可分為:剪力模式、加壓模式及 彎曲模式,這些模式的物理模型及其特徵整理於表 2.3,其中本文後段所 設計的模型即是屬於彎曲模式,該模式有靈敏的感測能力,利於感測微小 驅動,因此為本文所使用之模式。 voltage spring mass piezo voltage spring mass piezo 圖 2.3 壓電加速規物理模形
17 表 2.3 壓電加速規受力模型及特徵(圖源:MEGGITT) 加壓模式 剪力模式 彎曲模式 結 構 特 徵 (1) 機械強度高 (2) 可 量 測 到 高 加 速 度、高共振頻及較高 的頻寬 (1) 機械強度高 (2) 可以量測到低頻 的訊號和高共振頻 率,且測量的頻寬 廣 (1)共 振 頻 率 及 機 械 強 度低,因此使用的頻 寬、加速度較低 (2)靈敏度高,故可量測 微弱的振動
18
第三章 模型建構與控制系統設計
3.1.壓電加速規系統
本實驗的壓電加速規為具有感測端及驅動端的機械結構如圖 3.1。其 中,感測端與驅動端之結構同為壓電黃銅複合懸臂樑,由固定端輸入加速 度產生振動扭矩,因扭矩使得壓電加速規感測端產生慣性位移,此時壓電 片產生彎曲變形,轉換成電壓或電流輸出訊號;且為增進系統性能,由力 平衡(Force Balance)理論做控制器設計,可提升系統頻寬並減少懸臂樑 運動範圍,將壓電加速規感測端的輸出訊號,輸入控制器中,由迴授控制 將控制器的輸出電壓,輸入至壓電加速規驅動端產生一平衡加速度的扭 矩,使得懸臂樑結構回復致平衡位置,即可由迴授電壓計算加速度與電壓 之關係式得到輸入加速度。 本論文將壓電加速規分為兩個子系統,分別為機械結構、控制器理論 兩大部分如圖(3.2),本章將介紹機械結構系統與感測電路的理論推導及 實驗結果。 d f b c e a 1 x 2x
3 x polarization d f b c e a 1 x 2x
3 x polarization 圖 3.1 壓電加速規機械系統 sensing driving driving19 pzt brass pzt pzt brass pzt 圖 3.2 力回饋壓電加速規系統方塊圖
3.1.1 壓電加速規機械系統
本文將有相同極化方向的壓電片六片,上下、左右對稱貼於黃銅樑兩 面。黃銅片為導體,做為地線,使得壓電片不受到電或力效應而相互干擾。 為了解系統特性及轉移函數,由壓電片(a、b)及(c、d)外緣線路相接,作 為驅動端供給同相位電壓,因極化方向之故,若當其中一片伸張時,另一 片必定會收縮,如此來產生彎曲力矩驅動懸臂樑。壓電片(e、f)受到驅動 端作用產生振動,當震動發生時,即會在表面產生相對的電荷。根據上述, 此機械系統的動態可以分為:驅動端電壓輸入→驅動端產生位移→感測端 產生位移→感測端電壓輸出,如圖 3.3,本章即運用第二章的壓電理論與 材料力學做機械系統的理論推導壓電加速規系統受電壓驅動時所產生的 位移並作 ANSYS 模擬驗證,同時求解壓電加速規轉移函數的理論模型。實 驗中,輸入驅動電壓至壓電加速規驅動端,利用都普勒干涉儀量測壓電加 速規懸臂樑頂端的位移,並在相同輸入情況量測壓電加速規感測端的輸出 電壓對機械系統做系統鑑別(System Identification),來得到機械系統 的轉移函數(Transfer Function)。在本章節最後做比較討論。以下就各 方面詳細討論: 控制器 機械結構 回授控制20 PZT Actuator Cantilever beam PZT sensor Displacement Displacement in
V
Vout PZT Actuator Cantilever beam PZT sensor Displacement Displacement inV
Vout 圖 3.3 壓電加速規機械系統方塊圖3.1.2 壓電加速規機械系統的運動分析
本節推導機械結構由電壓驅動後所產生的位移之關係,首先,須建構 本實驗機械結構的三層複合材料等效力關係式,再將其方程式帶入運動方 程式中求解。三層複合壓電結構假設為:1.省略x2方向的位移與作用力。 2.各層之間的接合狀態視為無滑動現象發生。3.黏著劑厚度可忽略。4.假 設感測端的位移與驅動端的位移在第一模態前為相等。 根據假設條件,考慮機械系統的尺寸壓電片與黃銅片長度同為 L、壓 電片均為寬度 b、壓電片之間的寬度b1、壓電片厚度hp及黃銅片厚度2he、 g(t)為固定端所受的力,如圖 3.4。 brass b b1 pzt pzt p h 2he p h L 1 x 3 x v v V=0 p p brass b b1 brass b b1 pzt pzt p h 2he p h L 1 x 3 x v v V=0 p p pzt pzt p h 2he p h L 1 x 3 x v v V=0 p p 圖 3.4 壓電加速規機械系統側向彎曲運動示意圖 2 x 3 x g(t)21 三層複合懸臂樑壓電結構的理論推導可表示如下: Ⅰ.位移與應變關係式: 驅動端: 3 1 3 2 3 1 1 1 1 u d u = x u = 0 u = - (x ,t) = = - = x x dx , , , , (3.1) 1 3 2 3 S = x S = S = 0, 感測端: 1 1 3 1 1 1 1 3 2 3 1 0 ( , ) dx d x u x t x u u x u , , , , (3.2) 0 2 3 3 1 x S S S , Ⅱ.電學邊界條件: 驅動端電位: 3 e p 3 e p 3 e 3 e x =h +h x =-h -h 1 2 1 1 2 1 x =h x =-h 1 2 1 3b b b 3b = = V - - b x - - b , +b x +b 2 2 2 2 3b 3b = = 0 - - b x +b 2 2 , , (3.3) 感測端電位: 3 e p 3 e p x =h +h x =-h -h 2 b b = = 0 - x 2 2 , (3.4) Ⅲ.準靜電方程式與電位電場關係: 3 3 3 3 dD d = 0 E = -dx dx , (3.5) Ⅳ.壓電材料組成方程式: 31 31 2 T 31 3 E 1 E 33 3 11 11 1 E 1 E 3 11 11 d d D = S +( + e )E S S d 1 T = S - ( )E S S (3.6)
22 Ⅴ.彈性材料方程式: 1 1 T = ES (3.7) 利用式(3.1)、(3.3)、(3.5)帶入式(3.6)我們可解得驅動端的電位方程 式為 及 V 的函數: <驅動端> 電位: 31 31 2 d 2 3 3 e p 2 3 e 2 2 2 p 31 d k V = (x - h )( - h )+(x - h ) = h 2d (1- k ) , ,hex3 h + he p (3.8) 2 3 3 e p 2 3 e 2 p V = (x + h )(- + h )+(x + h ) h ,-h - he px3-he (3.9) 將(3.8)及(3.9)帶入式(3.5)電場與電位的關係式中可得電場方程 式: 電場: 31 31 31 31 2 2 d d 3 3 2 2 p 31 d 31 d k k x V E = - + -h 2d (1- k ) d (1- k ) ,hex3 h + he p (3.10) 31 31 31 31 2 2 d d 3 3 2 2 p 31 d 31 d k k x V E = - -h 2d (1- k ) d (1- k ) ,-h - he px3-he (3.11) 電位移: 31 31 T 2 2 T 33 d d 33 e p 3 p 31 (1- k )V k (2h + h ) D = -h 2d ,hex3 h + he p (3.12) 31 31 T 2 2 T 33 d d 33 e p 3 p 31 (1- k )V k (2h + h ) D = - + h 2d ,-h - he px3 -he (3.13)
23 應力: 31 31 31 2 d e p 31 3 1 E E 2 E 2 11 p 11 d 11 d k (2h + h ) d V x T = - + -s h 2s (1- k ) s (1- k ) ,hex3 h + he p (3.14) 31 31 31 2 d e p 31 3 1 E E 2 E 2 11 p 11 d 11 d k (2h + h ) d V x T = - -s h 2s (1- k ) s (1- k ) ,-h - he px3 -he (3.15) 同理(3.1)、(3.4)、(3.5)帶入式(3.6),並如同驅動端的演算方法, 我們可以得到感測端的應力、電場、電位移為 及 V 的函數: <感測端> 電位: ) 1 ( 2 ) ( ) )( ( 2 31 2 2 2 2 3 2 3 3 31 31 d d e p e k d k h x h h x , hex3h + he p(3.16) 2 3= (x + h )(h3 e p 2 )+(x + h )3 e 2 , -h - he px3 -he (3.17) 電場: ) 1 ( ) 1 ( 2 2 31 3 2 2 31 2 3 3 1 3 1 3 1 3 1 d d d d k d x k k d k E ,hex3 h + he p (3.18) ) 1 ( ) 1 ( 2 2 31 3 2 2 31 2 3 3 1 3 1 3 1 3 1 d d d d k d x k k d k E ,-h - he px3-he (3.19)
24 電位移: 31 33 2 3 2 ) 2 ( 3 1 d h h e k D e p T d ,hex3 h + he p (3.20) 31 33 2 3 2 ) 2 ( 3 1 d h h e k D e p T d ,-h - he px3-he (3.21) 應力: ) 1 ( ) 1 ( 2 ) 2 ( 2 11 3 2 11 2 1 3 1 3 1 3 1 d E d E p e d k s x k s h h k T ,hex3 h + he p (3.22) ) 1 ( ) 1 ( 2 ) 2 ( 2 11 3 2 11 2 1 3 1 3 1 3 1 d E d E p e d k s x k s h h k T ,-h - he px3 -he (3.23) 式(3.8)~(3.23)為壓電材料為三層層狀結構下的等效力關係式,根據 上述方程式可進行機械系統在彎曲運動下運動方程式的推導。此時該運動 方程式為: 5 2 2 4 2 ( , ) ( ) S 3 3 3 s a V x t u (x,t) u (x,t) u (x,t) g t c I c m m x x t t t t (3.24) 若不考慮阻尼項(c = cS a=0)及外力g(t),式(3.24)簡化為: S 3 1 V = - u x (3.25) 力學邊界條件: 3 3 1 1 2 1 3 1 u 3b 3b u = = 0 at x = 0 - - b x +b (u = - ) x 2 2 , , (3.26) S 1 1 2 1 3b 3b V = M = 0 at x = L - - b x +b 2 2 , (3.27)
25 其中 e p 1 e p 1 3b h +h +b 2 3b S -h -h 13 2 3 - -b 2 V =
T dx dx e p 1 e p 1 3b h +h +b 2 3b 3 3 2 3 -h -h - -b 2 M =
x T dx dx 31 31 2 d 31 e p 3 3 e p e e p p E E 2 11 11 d piezo 3 1 e elastictorque flexural rigidly
k d V(4h + 2h ) 2 M = b +b{ [(h + h ) - h - (2h + h )h ] S S (1- k ) 4 b 2 + [ (3+ ) h E ]} b 3 = Q +C 由彎曲力矩方程式(moment-curvature equation): e p 1 e p 1 S 1 3b h +h +b S 2 3b 13 2 3 3 p p 1 e e -h -h - -b 1 1 2 dM = V dx dV d = T dx dx = -mu m = 6br h +(3b+ 2b )r h dx dx
, (3.27) 由(3.27)式,我們可得四階偏微分方程式及其邊界條件,並解出壓電 加速規機械系統其驅動端經電壓產生力矩後的彎曲位移。 2 S 3 2 1 1 V M = = -mu = m x x 4 2 4 2 2 1 m m = w (x,t)= (x)T(t) p = x C C ,令 , 4 2 2 1 flexural rigidly torque d m - = 0 dx C Q B.C (0)= (0)= 0 (L)= - (L)= 0 C : 、 2 1 deflection L Q (x ) = 2C (3.28)26 其中 31 31 31 2 e d 2 2 p 31 2 2 d p E 2 1 e 3 e 3 e 3 e 2 11 d p p p p p 2h (1- k )(1+ ) h d L V L Q = k 2C h b h h h 2h 2[S E(1- k )(1+ )( ) +( +1) - ( ) - ( +1) h ] 3b h h h 4 h 1 1 1 1 2
[cosh( )+ cos( )][cos( x ) - cosh( x )] + [sin(l) - sinh(l)][sin( x ) - sinh( x )]
L L L L = [1+ cosh( )cos( )] 同理,根據感測端的邊界條件,亦可解得感測端的位移如: )] x L λ cos x L λ )(cosh x L λ sin x L λ sinh x L λ cos x L λ cosh ( x L λ sin x L λ [sinh c δ 1 1 1 1 1 1 1 1 1 1 ) (x1 (3.29) 又根據本文假設感測端與驅動端有相同的位移,因此可得 deflection x x ) ( ) ( 1 1 1 δ (3.30) 壓電加速規機械系統受力後產生的彎曲如式(3.30),而由(3.8)~(3.23) 此 15 個方程式可知,將
1''(
x
1)
帶回方程式中,即可求得驅動端與感 測端的應力、應變、電位、電場、電位移等參數,而機械系統的壓電片感 測端電輸出,可由高斯定律(Gauss law)得知,壓電薄層的電荷可以經由 上下電極表面交集之封閉曲面S的面積 A 測得,其電荷方程式如下所示 [14]: sensing s Q(t)=
D dA (3.31)27
3.1.3 壓電加速規機械系統的轉移函數
為獲得壓電加速規機械系統的轉移函數,將(x,t)= (x)T(t) 代入前節運 動方程式(3.24)式之中,可得: 2 2 ( ) 2 ( ) ( ) 2 r r ( ) rD d ( ) ( ) d T t dT t T t K V t f t dx dt (3.30) 1 D r x L d (x) K Q dx (3.31) 其中 ( ) ( ) d V t 為驅動端電壓,由式(3.29)可知若系統的驅動電壓或固定端為 零,即可得壓電加速規系統的機械動態方程式如: 2 2 2 ( ) ( ) 2 r r ( ) ( ) d T t dT t T t R t dx dt (3.32) 壓電加速規結構的感測端電壓輸出轉移函數則考慮等效電路圖(3.5) pi
Cpi
p Cp 1 R 圖 3.5 壓電加速規感測端等效電路 其中,ip為壓電片受到在 x 方向形變後所產生的電流(3-1 mode),Cp為壓 電片電容值,R 為量測電壓的阻抗,又由壓電材料本構方程式(2.4)及(3.29),1 可得: 3 3 31 1 33 3 1 ( ) 2* 2 ( ) p S A d V t D dx i t D e S E dt
R , (3.33)28 (3.33)經積分後可得壓電加速規感測端的電路方程式, ( ) ( ) 1 ( ) ( ) ( ) ( ) 2 s S S p p V t V t dT t C i t K dt R dt (3.34) 其中 31 31 0 11 11 (2 ) (2 ) ( ) 2 2 L e p e p S E E x L d h h d h h d (x) K (x) x dx s s dx
由(3.32)及(3.34)取拉式轉換可得式(3.35)、式(3.36),將壓電加速 規機械及電轉移函數相乘即可求得壓電加速規開路轉移函數如式(3.37) 2 2 ( ) 2 r r s T(s) sT(s) T(s)R s (3.35) ( ) ( ) 1 ( ) ( ) ( ) (s) 2 s s S p p 1 C sV s V s i s K sT R (3.36) +2 + 2 r T 2 2 r r V(s) s = C R(s) 1+ s s s (3.37) 其中 T S 2 P r P 1 C K = 2RC C ,29
3.1.4 ANSYS 數值模擬與實驗
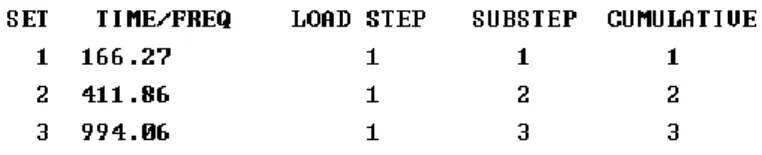
前節的推導我們可以得到壓電加速規驅動與感測端的應力、應變、電 位、電場及電位移方程式的理論解,為求其正確性,利用 ANSYS 模擬比較 理論方程式帶入系統參數的解析解,系統參數如表 3.1、壓電參數如表 2.1。比較機械系統再驅動端入交流電壓所產生的彎曲、電位移的簡諧分 析(Harmonic Analysis),並且進行模態分析(Modal Analysis)。表 3.1 壓電加速規機械系統尺寸 系統參數 數值(實驗結構數值) p h 壓電片厚度 e h 黃銅片厚度 L全長 b壓電片寬度 1 b壓電片間隙 V 輸入電壓 E黃銅楊氏細數 輸入角頻率 3 0.64 10 m 3 0.2 10 m 3 70 10 m 3 20 10 m 3 21 10 m 5V 9 103 10 pa 125.7 rad/s 圖 3.6-圖 3.10 為模擬結果,其模擬與理論解析解整理於表 3.2。
30
圖 3.6 模態分析模擬結果
圖 3.7 感測端電位移簡諧分析,理論解析解(實線)與模擬值(虛線)比較圖
31 圖 3.9 感測端位移簡諧分析,理論解析解(實線)與模擬值(虛線)比較圖 圖 3.10 驅動端位移簡諧理論值(實線)實驗值(虛線)比較圖 在實際的實驗中,壓電加速規的固定端無法理想黏貼於固定端,因此 本實驗結構乃是將黃銅片預留 20mm 的長度,使結構能夠固定,實驗結構 如圖(3.11)。亦考慮實驗的實際情況,ANSYS 模擬壓電加速規結構也更改 成相同於實驗的夾持方式如圖(3.12)。
32 圖 3.11 壓電加速規實驗結構 圖 3.12 壓電加速規 ANSYS 模擬結構 分析實驗與模擬相對合理性及對系統結構本身的了解,利用都普勒量 測儀測量壓電加速規機械結構經驅動端輸入電壓後懸臂位置感測端及驅 動端的位移,並對照 ANSYS 簡協模擬分析系統輸入頻率在 0~1K HZ 的的動
33
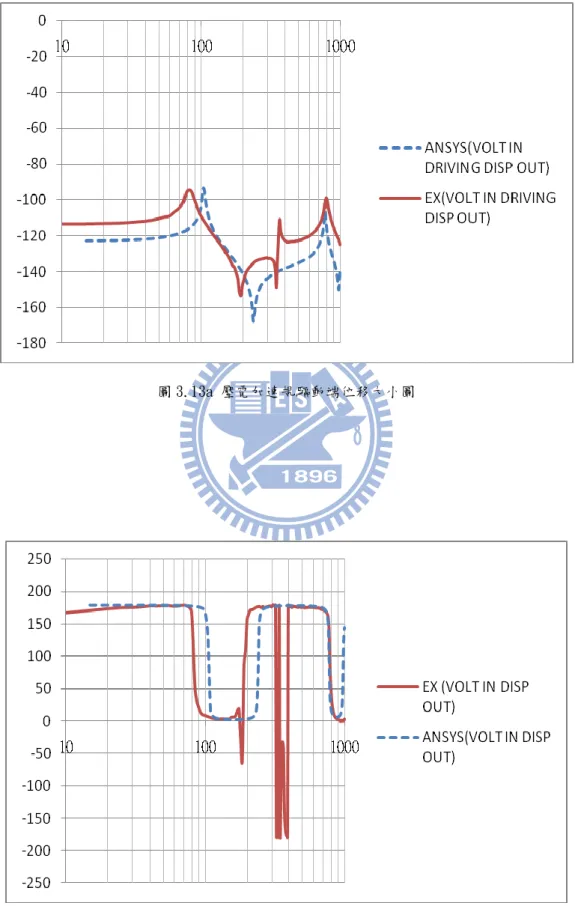
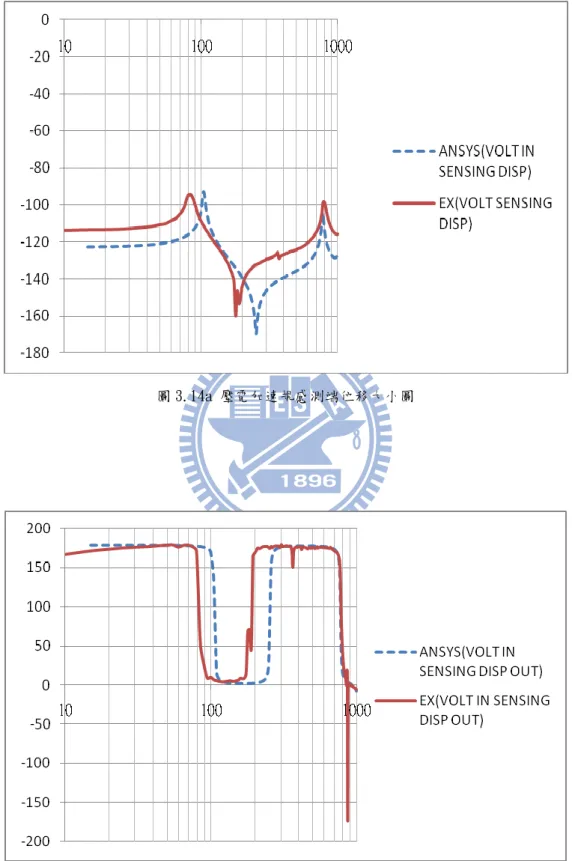
態行為如圖(3.13a)、(3.13b)、(3.14a)、(3.14b)
圖 3.13a 壓電加速規驅動端位移大小圖
34
圖 3.14a 壓電加速規感測端位移大小圖
35 由於本實驗壓電加速規結構感測端與驅動端的變型方式在低頻下有 一致的變化,為便於分析,由 0.1HZ 至實驗的第一個共振點量測本實驗結 構由驅動端輸入電壓,感測端為輸出電壓,藉此來得到壓電加速規的波德 圖,實驗結果如圖(3.15) 圖 3.15 壓電加速規實驗波德圖 由壓電加速規實驗的波德圖便進行系統鑑別(System identification) 求得系統的轉移函數為: 2 V(s) 0.00317s 102683.4 = R(s) 1+0.053s s +192.3s +102683.4 (3.38)
36
3.1.5 討論
第一部分,理論解析解與 Ansys 模擬值,由圖(3.8)~(3.10)可發現在 第一模態前的各系統輸出特性比較,有良好的正確性。 在壓電加速規感測及驅動端位移量測實驗與 ANSYS 模擬的比較中,趨 勢有相當的正確性,其誤差部分可能的原因為機械結構在製造過程中未黏 貼精確而造成。 壓電加速規開路轉移函數的求得,有便於下一章節控制理論部分對機 械結構的系統特性詳加討論與分析。37
第四章 控制理論模擬及實驗
本章討論藉由力平衡(Force balance)控制理論來改善系統特性,且 抑制三層式複合懸臂樑因外部加速度所產生的震動,達到輸入系統加速度 的估測。在控制器設計部分,控制參數設計必須考量硬體所能容許的範 圍,並以模擬驗證。爾後,控制器乃使用 DSP F2812 寫入 P 及 PI 控制器 實現,進行壓電加速規系統閉迴路控制。4.1 節討論壓電加速規系統控制 器設計,4.1.1 介紹 MATLAB 模擬設計控制器的結果,4.2 為實驗設備介紹, 4.3 節為壓電加速規控制實驗結果,4.4 結果與討論。4.1 壓電加速規控制器設計理論
力平衡(Force balance)控制理論其作用過程如圖(4.1),即使壓電加 速規在受外部作用力時,其質量塊藉由力產生器(Force Generator)產生 一相反的平衡力矩,使得質量塊保持於平衡狀態,而本實驗乃透過此理 論,針對先前得到的壓電加速規系統的開路轉移函數,設計 P、PI 控制器, 將感測端因外部力而產生的輸出電壓,經控制器回授到驅動端之中,使壓 電結構產生抵銷加速度力的扭矩。此時,可預期懸臂樑的繞曲減小、壓電 加速規感測端因懸臂樑繞曲減小得到較小電壓的輸出,且藉此平衡力或產 生該力的電壓,我們即可得到外部作用力或外部加速度的大小。因此,本 節即根據上述建立回授力與加速度及控制輸出電壓與加速度的轉移函 數,在加速度輸入為一弦波時,回授力與控制輸出的輸出穩態響應。38 ( ) g t E q u ili b ri u m s ta te ( ) g t g t( ) ( ) M t E q u ili b ri u m s ta te ( ) g t E q u ili b ri u m s ta te ( ) g t g t( ) ( ) M t E q u ili b ri u m s ta te 圖 4.1 力平衡作用過程 首先,考慮 P 控制器控制系統,以簡單的控制器來提高系統增益,增 加系統的相位邊限,達到本文的控制目的。再以 PI 控制提升系統性能, 增加壓電加速規系統的操作頻寬,使得低頻率的加速度可以被估測。 依據力平衡理論及 3.1.3 節的運動方程式(3.30),加入 P 控制器後, 系統的運動方程式可表為如式(4.1)、(4.2),加入 PI 控制器後,系統的 運動方程式可表為如式(4.3)、(4.4): ) ( ) ( ) ( ) ( 2 ) ( 2 ( ) 2 2 t a t V K t T dx t dT dx t T d S P r r (4.1) dt t dT t K t V R dt t dV C S S S P ) ( ) ( ) ( 2 1 ) ( ( ) 1 ) ( (4.2) 2 2 ( ) ( ) 2 ( ) ( ) 2 r r ( ) rD ( P S ( ) I S ( ) ) ( ) d T t dT t T t K K V t K V t dt a t dx dt
(4.3)39 dt t dT t K t V R dt t dV C S S S P ) ( ) ( ) ( 2 1 ) ( ( ) 1 ) ( (4.4) 根 據 以 上 , 壓 電 加 速 規 系 統 的 運 動 方 程 式 經 拉 式 轉 換 (Laplace transform)可得: ) ( 2 2 ) ( ) ( 2 2 2 2V( ) s s s K K s s s A s T S r r P D r r r (4.5) 1 2 2 ) ( 1 1 ) ( s C R K R s V P S S (4.6) ( ) 2 2 2 2 1 ( ) ( ) ( ) ( ) 2 2 D r P I S r r r r K K K A s s T s V s s s s s (4.7) 1 2 2 ) ( 1 1 ) ( s C R K R s V P S S (4.8) 因此可得閉迴路方塊圖如圖(4.2),加速度A s( )輸入壓電加速規,感測 端因壓電片變形離開平衡狀態產生一位移X s( ),因逆壓電效應輸出電壓 ( ) ( ) S V s ,將輸出電壓送入所設計的控制器中,產生一平衡所需的電壓 ( ) O V s ,回授至壓電加速規的驅動端產生平衡力F s( ),使得壓電層狀結構 回復至平衡位置,其中 D r K 、m為電轉力常數及機械系統質量。 圖 4.2 系統閉迴路方塊圖 由閉迴路方塊圖,可建立平衡電壓及回授力與加速度的轉移函數,如
40 式(4.9)~(4.12): ) ( ) 1 )( 2 ( ) ( 2 2 2 2 s A K K C m s s s m K C m s V D r P r T r r P r T O (4.9) ) ( ) 1 )( 2 ( ) ( 2 2 2 2 s A K K C m s s s m K C K s F D r P r T r r P r T D r (4.10) 2 2 2 2 ( ) ( ) ( ) ( 2 )(1 ) ( ) T r I P O D r r T r r I P m C K s K V s A s m s s s C K K s K (4.11) 2 2 2 2 ( ) ( ) ( ) ( 2 )(1 ) ( ) D r T r I P D r r T r r I P K C K s K F s A s m s s s C K K s K (4.12) 若 加 速 度 輸 入 訊 號 為 a t( )a sin tg ,則 平 衡 電 壓 及 回 授 力 , 式
(4.9)~(4.12)的穩態響應(Steady state response)如式(4.3)~(4.4):
( ) ( ) ( ) ( ) ( ) ( ) O O o g V j V j v t a sin t A j A j (4.13) ( ) ( ) ( ) ( ) ( ) g ( ) F j F j f t a sin t A j A j (4.14)
41
4.1.1 MATLAB 模擬壓電加速規控制器設計結果
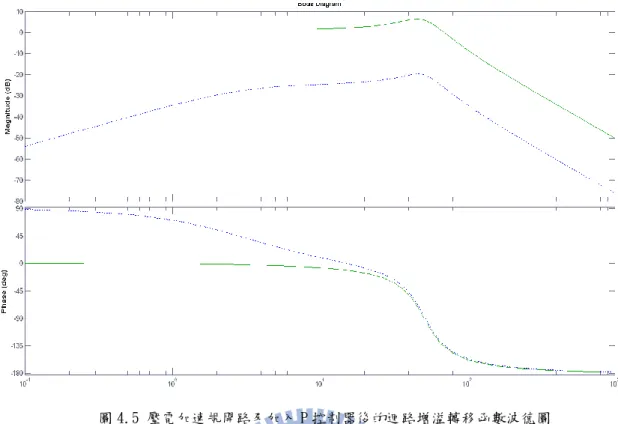
由前節討論,本節繪出系統在加入 P 控制器前後的波德圖。壓電加速 規開路增溢波德圖(虛線線段)、加入控制器後的迴路增溢波德圖(實線線 段),如圖(4.3)。V sO( ) / ( )A s 的波德圖(虛線線段)、F s( ) / ( )A s 的波德圖(實 線線段), 如圖(4.4)。。控制器參數為KP 65。 圖 4.3 壓電加速規開路及加入 P 控制器後的迴路增溢轉移函數波德圖42 圖 4.4 F s( ) / ( )A s 、VO/ ( )A s 轉移函數波德圖 P 控制器 而加入 PI 控制器前後的波德圖。壓電加速規開路增溢波德圖(虛線 線 段 ) 、 加 入 控 制 器 後 的 迴 路 增 溢 波 德 圖 ( 實 線 線 段 ) , 如 圖 (4.5) 。 ( ) / ( ) O V s A s 的波德圖(虛線線段)、F s( ) / ( )A s 的波德圖(實線線段), 如圖 (4.6)。。控制器參數為KP 69、KI 1300。
43
圖 4.5 壓電加速規開路及加入 P 控制器後的迴路增溢轉移函數波德圖
44 圖 4.7 F s( ) / ( )A s 轉移函數波德圖 PI(實線線段)、P(虛線線段)控制器比較 圖(4.3)、(4.5)系統開路轉移函數頻寬為 70HZ,經控制後迴路後增益 提高,相位邊限為 47.5 度及 42.9 度,由圖(4.4)可知 F s( ) / ( )A s 轉移函 數經過 P 控制後,頻寬為 115HZ,在 3~57.6HZ 其大小值約為-5.26dB,因 此在此操作區間F s( )、A s( )的值相差一常數,因此加速度可以被估測。而 圖(4.6) F s( ) / ( )A s 轉移函數經過 PI 控制後,頻寬為 115HZ,在 0.1~57.6HZ 其大小值趨近-5.26dB,因此在此操作區間F s( )、A s( )的亦相差一常數,符 合預期的控制目標。又以圖(4.7)可以比較出兩控制器控制後的系統輸出 響應特性,PI 控制後系統在低頻的增益提高,提高了系統估測加速度的範 圍。
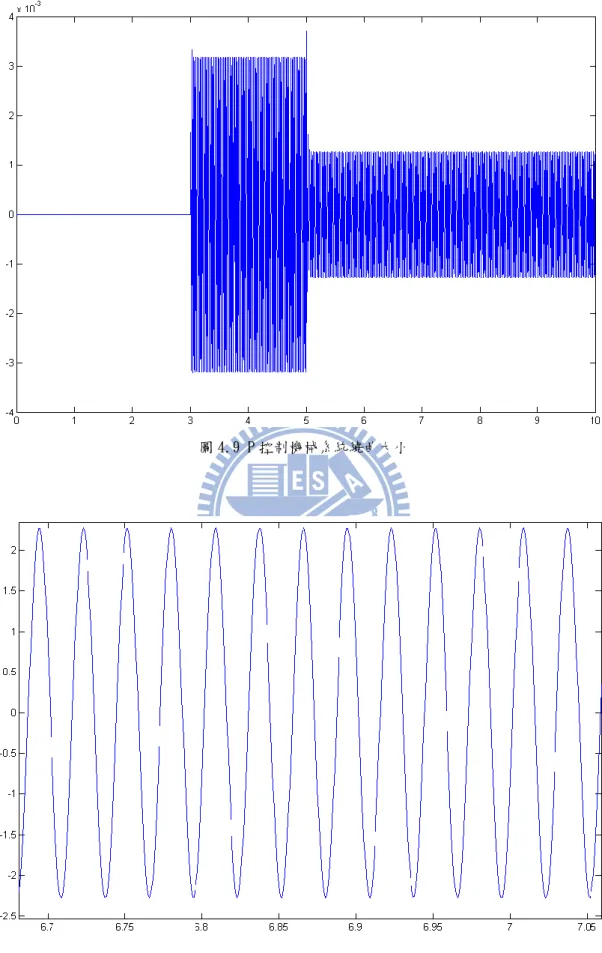
45 我們也可以模擬在加速度訊號輸入後系統的穩態響應,考慮 P 控制壓 電加速規系統在第 3 秒輸入加速度訊號為a(t)sin235t,第 5 秒控制器啟 動,圖(4.8)、(4.9)、(4.10)、(4.11)可知壓電加速規感測端電壓大小、 機械系統繞曲大小、回授電壓大小、輸入加速度(虛線線段)與回授力(實 現線段)比較圖。 圖 4.8 P 控制壓電加速規感測端電壓大小
46
圖 4.9 P 控制機械系統繞曲大小
47 圖 4.11 P 控制輸入加速度(虛線線段)與回授力(實線線段)比較 圖(4.8)~(4.9)在第五秒 P 控制器啟動後,感測端輸出電壓、機械結 構的繞曲如預期的降低,而圖(4.10)可得回授的電壓約為 2.28V,圖(4.11) 的回授力亦與加速度,為常數的差值。 考 慮 PI 控 制 壓 電 加 速 規 系 統 在 第 3 秒 輸 入 加 速 度 訊 號 為 t t a( )sin235 ,第 5 秒控制器啟動,圖(4.12)、(4.13)、(4.14)、(4.15) 可知壓電加速規感測端電壓大小、機械系統繞曲大小、回授電壓大小、輸 入加速度(虛線線段)與回授力(實現線段)比較圖。
48
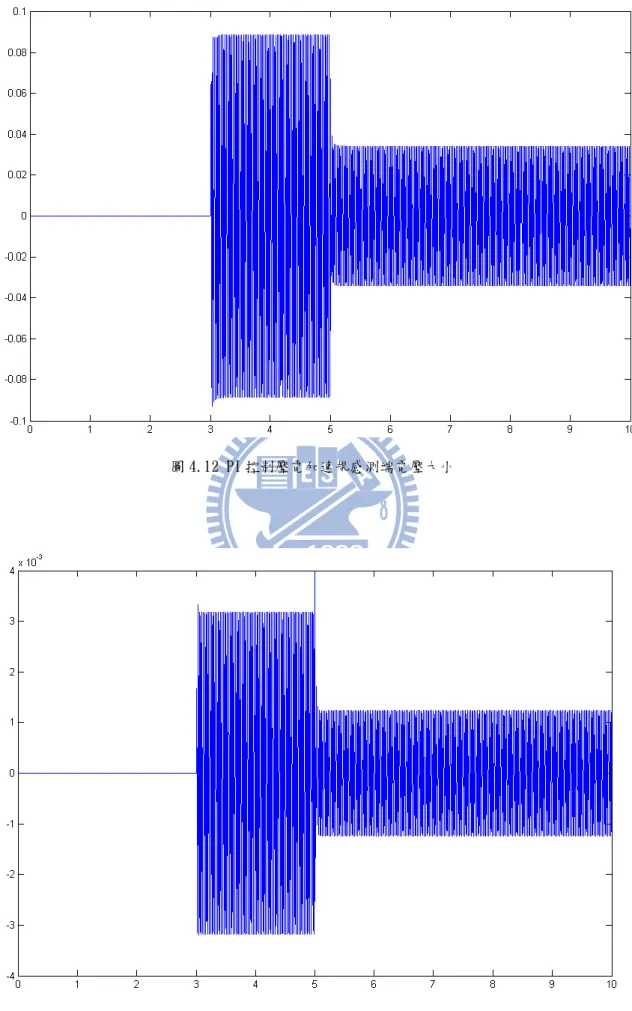
圖 4.12 PI 控制壓電加速規感測端電壓大小
49
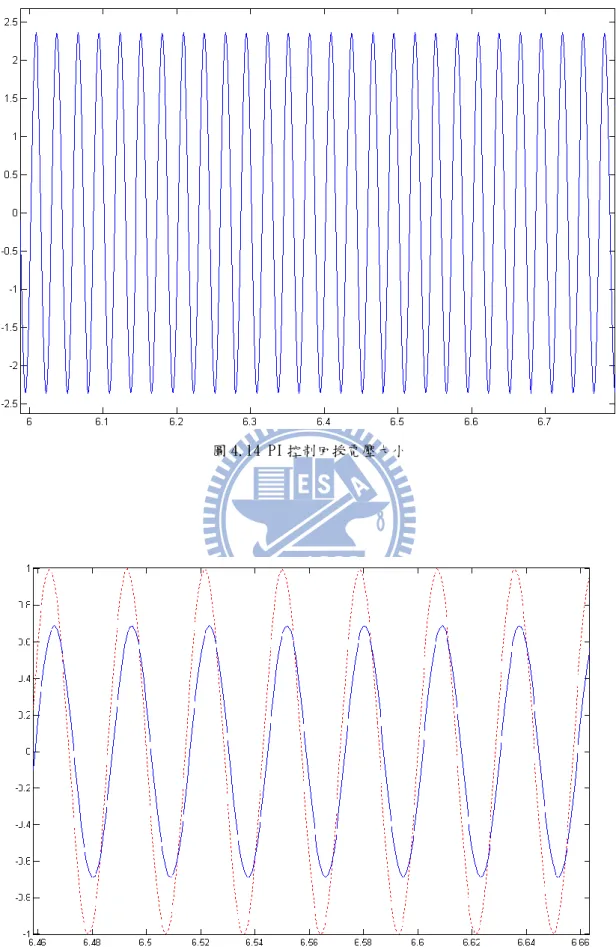
圖 4.14 PI 控制回授電壓大小
圖 4.15 PI 控制輸入加速度(虛線線段)與回授力(實線線段)比較
50
圖(4.12)~(4.13)在第五秒 PI 控制器啟動後,感測端輸出電壓、機械 結構的繞曲如預期的降低,而圖(4.14)可得回授的電壓約為 2.28V,圖 (4.15)的回授力亦與加速度,亦為常數的差值。
51
4.2 節 實驗流程及硬體架構
4.2.1 實驗流程 實驗流程:考慮前節的模擬,壓電加速規挾持於線性平台上,在線型 平台經訊號產生器驅動後產生位移變化,加速規機械結構受到力作用後隨 線性平台運動發生繞曲,因而感測端產生一 0.087V 的電壓輸出。將感測 端電壓送入至 DSP 控制器前,由於 DSP F2812 的類比數位轉換器(Analog to Digital Converter)僅能輸入 0~3V 的正電壓,且考慮 ADC 的解析度,因 此,將感測端的電壓及電源供應器供給直流電壓,送入濾波器做電壓放大 17.24 倍與電壓位準至 0V 以上,此時濾波器的輸出為峰值對峰值 3V。當 ADC 接收類比訊號後轉成數位訊號,在將訊號作控制處理前,減去先前因 ADC 輸入條件而加入的直流偏壓,再除以先前所放大的 17.24 倍,送入控 制器中。而 DAC 為 0~10V 的正電壓輸出,因此輸出控制訊號前我們必須在 控制器內部做訊號位準偏移至 0V 以上,後由數位類比轉換器(Digital to Analog Digital Converter)輸出類比電壓訊號輸出。將輸出訊號經加法 器(Adder),消除因 DAC 產生的電壓偏移,最後將加法器輸出電壓送入至 電壓放大器中放大至所需要的增溢值,將訊號接回加速規的驅動端中作回 授力平衡控制。實驗流程如圖(4.16)52 4.2.1 硬體架構 壓電加速規的實驗儀器配製,如圖(4.17) 壓電加速規擺放於線性平台 訊號產生器驅動線性平台 濾波器 DSP F2812及DAC 直流電壓供給器 ADDER 電壓放大器 壓電加速規擺放於線性平台 訊號產生器驅動線性平台 濾波器 DSP F2812及DAC 直流電壓供給器 ADDER 電壓放大器 圖 4.17 實驗設備圖 儀器名稱: 1.FUNCTION GENERATOR GFG-3015
2.TDS DIGITAL PHOSPHOR OSCILLOSCOPE 3.DC POWER SUPPLY CPC-30300
4.PZD700
53
4.3 節 壓電加速規即時控制實驗結果
經由前節的控制理論討論及模擬,本節則實現控制理論,故控制器參 數延用 4.2 節的模擬,由實際的量測與模擬相比較,量測的項目包含 P 及 PI 控制時系統的在開回路時感測端的輸出電壓及控制電壓,閉迴路時感測 端的輸出電壓及控制電壓,將控制電壓乘上電轉力常數與模擬做回授力比 較。結果如圖(4.18)~(4.27),其中實線線段為實驗結果,虛線線段為理 想值,練線為理想加速度。 P 控制 圖 4.18 P 控制-開迴路感測端的輸出電壓54
圖 4.19 P 控制-開迴路控制電壓
55
圖 4.21 P 控制-閉迴路控制電壓
56
PI 控制
圖 4.23 PI 控制時開迴路感測端的輸出電壓
57
圖 4.25 PI 控制時閉迴路感測端的電壓
58 圖 4.27 PI 控制回授力與加速度的估測 4.3.1 節 結果與討論 在 4.3 節的模擬比較,可看出實驗結果與模擬理想值有良好的匹配。 兩個不同控制器量測的項目,操作頻率為 35HZ 的位置,由 (4.7)波德圖 可知,壓電加速規系統經兩個控制器進行控制後在 35HZ 時大小與相位相 同,因此兩個結果為一致,達到抑制懸臂樑震動與加速度估測的目的。