亞 東 技 術 學 院 * 作者為亞東技術學院電機工程系講師。
人型伺服馬達機器人研製
許文昌
*摘要
本文伺服馬達機器人主要整合的分項技術包 括:圖控軟體應用設計技術、馬達驅動與運動控制技 術、微處理器應用設計技術、資料通訊應用設計技 術、感測器應用設計技術、影像辨識應用設計技術、 硬體與 PCB 應用設計技術和機構設計與組裝技術等。 本文將針對圖控軟體應用設計技術、馬達驅動與 運動控制技術和影像辨識應用設計技術來說明,圖控 軟體應用設計技術主要是採用 LabVIEW 圖控語言來 設計人機介面與機器人主控程式;而馬達驅動與運動 控制技術主要是由利用 SPCE061A 凌陽板做為機器 人的控制處理核心,機器人是由 17 個伺服馬達所組 成,伺服馬達機器人控制,電腦必須透過 XBee 無線 模組下命令給 SPCE061A 凌陽板,再產生 PWM 訊號 控制機器人;至於影像辨識應用設計技術主要是透過 USB Webcam 擷取影像,作為開啟介面的鑰匙及錄影 和播放前方影像,並且能夠辨識簡單的文字並做出與 文字意義相同的動作。 關鍵詞:LabVIEW 圖控語言、SPCE061A 凌陽板、 伺服馬達、XBee 無線模組、PWM 訊號、 USB webcam壹、前言
智慧型機器人可分為工業用機器人與服務型機 器人,工業用機器人運用在惡劣環境且須要較精確與 特殊功能的地方,因此要開發工業用機器人需較高的 資本與技術,而服務型機器人又以家用機器人為主, 可以扮演家庭清潔、教育庭娛樂、遠端監控、家庭照 護、異常通知等等功能,而家用機器人根據國際機器 人協會(IFR)官方統計報告指出 2008~2011 年家用服 務機器人的銷售整體約 1200 萬台,其中家事機器人 約 460 多萬台,教育娛樂方面約 730 多萬台,總產值 可達 18 億美元,而最重要的是開發的資本與技術要 求較低,因此本團隊選擇了小型服務機器人為主要開 發研究的主軸,這樣比較容易達到我們設定的目標。 目前市面上的小型服務人型機器人,大多是利用 電腦編輯腳本或將已經編好的腳本,經電腦轉換成機 器人控制器所接受的命令,然後再一次載入控制器執 行,執行命令後,機器人就無法和電腦互動,為了要 解決這個缺失,本機器人引進了 LabVIEW 圖控語言 設計電腦端的人機介面與主控程式、引進了 USB Webcam 擷取影像,並做影像辨識,另外還引進紅外 線測溫與超音波測距,讓機器人具備視覺、環境參數 收集與電腦互動的能力,並能透過網路達到遠端控 制。另外為了要降低成本,採用了台灣祥儀公司所製 造伺服馬達與凌陽公司的凌陽 A61 板來當機器人的 馬達與控制板。貳、系統架構
伺服馬達機器人的系統架構可分別從硬體與軟 體架構來說明。 1. 硬體架構如圖 1: PC 端使用 LabVIEW 圖控語言建構機器人人機介面與主控程式,透過 USB 互轉 RS232 串列傳 輸介面,再經 XBee 無線傳輸介面,將命令與資料 傳輸給機器人上的 XBee 模組,而 XBee 模組會將 無線訊號轉成 RS232 格式的 TTL 訊號,來與凌陽 61 板通訊用,凌陽板收到命令後,依命令動作, 包括產生 PWM 訊號來控制 17 顆伺服馬達,讓伺 服馬達機器人,依規劃做動作,另外還利用凌陽 61 板透過超音波測距 LV-MaxSonar-EZ1 模組,測 量目標物距離;透過紅外線測溫模組,可同時測量 環境溫度和目標溫度等,而這些資訊也會透過 XBee 傳輸介面回傳給電腦。 為了要讓機器人具有視覺能力,因此加入了 USB Webcam 來做為機器人的頭部,透過 USB Webcam 擷 取的影像,可以很輕易的利用利用 NI 所開發的 Vision Assistant 軟體處理,使機器人除了具備基本的監視及 錄放影功能之外,還可利用影像文字辨識,然後產生 控制命令傳輸給機器人,並做出與文字意義相同的動 作,例如舉手、半蹲、前進、跳舞等等的動作。 另外還加入無線搖桿接收器,將它接到電腦 USB 埠後,可與電腦滑鼠互換使用,讓喜歡電動的人操作 更有樂趣。 圖 1 伺服馬達機器人的硬體架構
2. 軟體架構如圖 2: 程式設計主要包括人機介面、線上編輯介面、 動作控制介面、影像辨識介面與量測資訊介面程式 設計,主要以 LabVIW 圖控軟體為主。 圖 2 伺服馬達機器人的軟體架構
參、實體實作
本文將只針對伺服馬達機器人人機介面、馬達驅 動技術與影像辨識應用設計技術實作做敘述,敘述如 下: 1.伺服馬達機器人的操作介面功能如下:a.辨識使用者介面:使用 IMAQ Match Color Pattern 透過 USB Webcam 可將內建之圖片樣板與辨識視 窗的影像做比對產生門鎖之效果,介面如圖 3、圖
圖 4 辨識使用者介面(辨識後) b.線上編輯介面:用來直接操作機器人,提供線上 編輯機器人動作的功能,並且能將此動作記錄起 來,作為機器人動作腳本之用,介面如圖 5 所示。
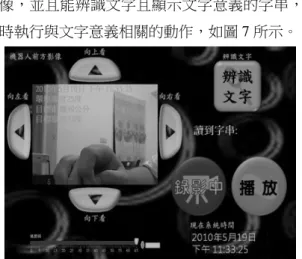
圖 5 線上編輯介面 c.動作控制介面:可讓機器人載入預設的腳本做出 各種連續多樣化的姿勢,並可以選擇用滑鼠按鈕 或搖桿控制,介面如圖 6 所示。 圖 6 動作控制介面 d.錄影辨識介面:錄下機器人前方影像並播放影 像,並且能辨識文字且顯示文字意義的字串,同 時執行與文字意義相關的動作,如圖 7 所示。 圖 7 錄影辨識介面 e.量測資訊介面:量測溫度及距離等參數,提供機器 人動作時無障礙的功能,介面如圖 8 所示。 圖 8 量測資訊介面 2.伺服馬達機驅動技術說明如下: a.伺服馬達接腳與連接方法: 使用由台灣祥儀企業公司所製造伺服馬達 SYS-214050,如圖 9。 圖 9 伺服馬達 SYS-214050
本人拿到的這批伺服馬達接線有防呆裝置, 其中白色接腳接受 TTL 準位的 PWM 控制訊號, 紅色接電源+9V,黑色接地。 b.伺服馬達的驅動 伺服馬達 SYS-214050 所接受的控制訊號為 PWM 訊號如圖 10 與圖 11 所示為馬達旋轉角度 0 度與 180 度的波形。 圖 10 角度 0 度時量測波形圖 圖 11 角度 180 度時量測波形圖 由圖中得知波形週期(T)固定為 11.6ms ,脈波 週期(t)為 500us 到 2000us,馬達轉動角度為 0 度到 180 度,由上我們可能算出 1 度大約 8.33us,但控 制暫存器 8 位元,其值可為 0~255,因此 1 位元代 表 0.705 度,約 5.873us,而腳本是以度為單位, 傳輸與凌陽板是使用位元,伺服馬達是使用時 間,因此 LabVIEW 軟體要將控制角度換算為位元 值,再將位元值傳給凌陽板,凌陽板再將位元值 轉成由 I/O 腳送出的 PWM 訊號,這樣便可控制伺 服馬達的旋轉角度。 c.伺服機器人的馬達配置 如圖 12 是伺服機器人的十七顆伺服馬達的配 置圖,這會影響腳本與凌陽板 I/O 腳配置,每個馬 達的編號在控制元上方。 圖 12 伺服機器人的馬達配置圖 d.凌陽板 I/O 腳配置 伺服機器人共有 17 顆伺服馬達,安排編號如 表 1,每顆馬達須要一支 I/O 腳,安排如下: 表 1 凌陽板 I/O 腳與 17 顆伺服馬達配置表 凌陽板 I/O 腳 伺服馬達編號 IOA1~IOA15 1 ~ 15 IOB0~IOB1 16~17 e.軟體封包格式設計 LabVIEW 軟體是把主要是馬達的編號與角度 位元值打成通訊封包,透過 RS232 送給凌陽板, 再由凌陽板產生 PWM 訊號。通訊封包的格式如 下: 圖 13 伺服機器人的封包格式
命令編號:當命令編號為 01 時,代表命令凌陽板 馬達動作。 馬達編號:如圖 14 代表速度(0~7)與馬達編號 (1~17)。 圖 14 速度與馬達編號格式 轉動角度:0~255,馬達旋轉角度。 f.伺服馬達 LabVIEW 程式 如圖 15 為 LabVIEW 馬達控制程式,可參考 伺服馬達通訊封包,便可很清楚了解。 圖 15 伺服馬達 LabVIEW 程式 g.伺服機器人凌陽板通訊程式 如圖 16,採用中斷的方式,只要 LabVIEW 傳 資料過來,便產生中斷,進入 IRQ7 的中斷服務程 式 , 首 先 讀 入 傳 入 值 , 檢 查 命 令 編 號 與 comnum=0,代表是否為封包第一個 byte,如果是 則儲存 com[0],然後離開中斷服務程式,若不是 則放入 com[comnum]中,若封包第二個 byte,則 會 放 入 com[1] , 若 封 包 第 三 個 byte , 則 放 入 com[2],然後 comnum++等於 3,就開始檢查命令 編號 com[0]的值,然後執行功能。 圖 16 伺服機器人凌陽板通訊程式 h.凌陽板伺服馬達程式 主要產生 IOA1~IOA15 和 IOB0~1 總共 17 隻 腳的 PWM 訊號,程式中將 IO 腳分成五組,每組 會以相同時間開始 PWM 訊號,而脈波寬度由電腦 傳入放在 romdata[x]陣列中的角度大小來決定,此 段程式將放在主程式中。其程式流程圖與程式如 下: 圖 17 伺服機器人凌陽板馬達程式
3.文字辨識,讓機器人依英文文字做動作: a.引進英文文字辨識,讓伺服馬達機器人依英文文 字做動作的程式流程圖 如圖 18,此部份程式包含在圖 2 影像辨識介 面中,主要是讓機器人能認字做動作。 圖 18 伺服馬達機器人文字辨識流程圖 b.文字辨識功能背板程式 如圖 19 所示,在按下辨識文字的按鈕時,程 式會開始初始化文字辨識的功能而載入做為文字 辨識樣板的 character set file,載入的預設樣本為 word.abc,有眼鏡的圖形化元件是用來比對樣本中 的文字跟影像上的文字是否相符合的元件,上面 的參數為初始範例設定。而辨識出的英文字串會 決定讀到字串的中文意義。在影像上用紅色矩形 框住辨識到的文字。同時啟動判斷是否動作的按 鈕,進入判斷是否動作的 CASE 迴圈。最後將讀 到的字串比對是否正確,而啟動機器人預設動作 的按鈕執行動作。 圖 19 文字辨識功能背板程式 此介面的辨識文字功能如表 2 所示,將紙板 在 USB Webcam 面前,並按下辨識文字的按鈕, 影像辨識到與文字辨識 OCR 樣板相符合的文字 時,並且能顯示文字意義的字串,機器人也同時 執行文字意義相關的動作。 表 2 文字辨識字串顯示 1.站立(STAND) 2.走路(WALK) 3.跳舞(DANCE) 4.踢(KICK)
肆、結論
伺服馬達機器人的產品的開發成果與貢獻,總結 如下: 1. 完成圖形化伺服馬達機器人的開發如圖 20 與 21, 產品功能完整。 圖 20 伺服馬達機器人正面圖 圖 21 伺服馬達機器人背面圖 2. 引進 LabVIEW 圖控語言,讓機器人的人機介面更 加活潑生動,功能也更強大,包括辨識使用者介 面、線上編輯介面、動作控制介面、錄影辨識介面 與量測資訊介面,這些介面讓使用者操作機器人更 加方便且更加有趣。而且引進 LabVIEW 圖控語言 讓機器人的開發速度越快。 3. 引進 NI Vision Assistant 軟體,讓開發機器人影像 處理的速度更快,更準確,而且學生可以直接在軟 體上實作,然後再轉成 LabVIEW 程式。4. 引進便宜的 USB Webcam 配合 LabVIEW 圖控語 言,運用到機器人影像辨識上,讓開發機器人影像 辨識的成本大大降低,且節省大量的開發時間。 5. 引進英文文字辨識,讓伺服馬達機器人依英文文字 做動作。 6. 機器人可以利用 Webcam 進行錄影的功能,錄影的 影像上會加入錄影時的系統時間與感測器量測資 料,同時機器人也具備放影功能,能播放錄影的影 片。 7. 引進凌陽 A61 板配合 LabVIEW 圖控語言,讓機器 人除了可以動作外,還可以加入其他功能,讓機器 人功能更加強大。 8. 引進 XBee 無線傳輸,可以加長無線傳輸的距離, 並可實現同時監控多台機器人。 9. 引進紅外線測溫模組,讓機器人可同時測量環境溫 度和目標溫度。 10. 引進超音波測距模組,讓機器人可測得目標物的 距離。 11. 引進 XBOX 360 無線搖桿,可以直接使用搖桿操 作機器人。 12. 利用 Protel99 SE 來設計 RS232 訊號轉 TTL 準位 介面板,並完成電路板實作。 伺服馬達機器人在學生訓練的成果與貢獻,總結 如下: 1. 伺服馬達機器人參與學生參加比賽得了許多的獎 項,包括 : 2009 亞東盃全國電機應用專題競賽嵌 入系統組第二名、2010 年亞東盃全國電機應用專 題競賽嵌入系統組第一名、98 學年度全國智慧型 機器人大賽機器人創意設計項目第四名、第四屆凌 陽盃系統晶片創意應用設計大賽佳作和 2010 年電 機系專題海報設計競賽第一名。 2. 研發過程主要以培養訓練學生為主,因此每一個研 究計畫都會訓練出一批具有實作能力的優秀學生。 3. 將一些技術轉為教學內容或寫成教案,應用到微處 理機實務及圖控語言實務教學。
參考文獻
參考書籍: 1. 惠汝生編著,Labview 8.X 圖控程式應用,臺北, 全華書局,民國九十五年。 2. 蕭子健、王智昱、儲昭偉編著,虛擬儀控程式設計 Labview 8.X,臺北,高立書局,民國九十八年。 3. 鐘國亮著,影像處理與電腦視覺導論,臺北,東華 書局出版,民國九十八年。 4. R. C. Gonzalez, R. E. Woods 著, 繆紹綱 譯,數位 影像處理,臺北,台灣培生教育出版。5. NI Vision Concepts Manual . 6. NI User Manual. 參考資料: 1. http://www.ifr.org 2. 許文昌、王惠玲、陳佑權,「AI 馬達機器人研發」, 亞東學報第 29 期。 3. 周立柏,「具模仿能力之智慧型雙足機器人之設計 與實現」,碩士論文,國立中央大學電機工程研究 所,2007。 4. 陳盈翰,「多自由度雙足機器人之設計與控制實 現」,碩士論文,國立中央大學電機工程研究所, 2007。 5. 紀捷聰,「二足步行機器人的設計與控制」, 國立 台灣科技大學電機工程系博士論文,2005. 。 6. 王維漢,「我國智慧型機器人發展現況與展望」,工 業技術研究院機械所,2006 。 7. 郭家賓、卜悅茹、曾國宗,「家用服務機器人現況 介紹」,機械工業雜誌,2009/8。 網頁資料: 1. 伺服馬達機器人資料。 http://www.icci.com.tw/web/MdFront?command=md AllList&c_id=CA0000002307000162&pageNo=1 2. LV-MaxSonar-EZ1 高效能超音波檢測器資料與資 料手冊。 http://www.playrobot.com/sensor/product%20inform ation/ultrasonic_sensor/ez1.html 3. 數位電子羅盤 TDCM3 資料與資料手冊。 http://www.playrobot.com/sensor/product%20inform ation/location/tdcm3.html
4. ZigBee(XBee)對 USB port 專用連接板資料與資料 手冊。 http://www.playrobot.com/communication/product% 20information/zigbee/base/zigbeeusb.html 5. ZigBee(XBee)連接板資料與資料手冊。 http://www.playrobot.com/communication/product% 20information/zigbee/base/zigbeebs2base.html 6. XBee Pro 60mW U.FL Connection 資料與資料手
冊。
http://www.playrobot.com/communication/product% 20information/zigbee/module/xbee60mw08710.html