Journal of Engineering Technology and Education, ISSN 1813-3851
具電路參數最佳化與數位雙向控制之功因修正轉換器研製
蘇琨祥1、陳柏宏1、郭見隆2 1國立高雄應用科技大學 電機工程學系 2國立高雄第一科技大學 機械與自動化工程系 E-mail: [email protected]摘 要
本文提出有關雙向控制架構於功因修正電路時之研製。其輸入電源端是與交流市電端連接,藉由功因 修正抑制市電端虛功率,並經由單相 AC/DC 功率轉換器電路架構將此直流電源供應於輸出負載,可使直流 端輸出功率達 600W。本文以 16 位元單晶片數位信號處理器(Digital Signal Processor)及周邊電路為基礎 研製一組適用於全數位雙向控制之架構。並從中抓取回授訊號進行演算法,使電路與市電能達成高功因修 正及市電並聯之效果,即雙向控制。本文將著重於使功因修正器具有高功率因數、低諧波失真與高效率等 特性之研製。控制架構採用數位 PI 控制方式,包括電流內迴路與電壓外迴路。控制核心採用 Microchip 公 司之 dsPIC30F4011 數位訊號處理器調控市電端電壓及電流趨於同相位以實現數位式功因修正之技術。所有 的控制皆以數位訊號處理器達成,相關的實測結果說明本文所提出的電路具有前述良好輸出特性,並能符 合功率因數相關規範。最後利用最佳化實驗設計法針對最佳化電路參數進行設計與分析。整理出 LC 濾波器 最佳參數組合,將其得到之波形結果與數據做驗證,以追求理想之功因改善。 關鍵詞:高功因修正、市電並聯、雙向控制、數位 PI 控制、最佳化實驗設計法1. 前 言
由於科技的日新月異,以致電力電子產品被大量使用,而由電力電子設備所造成的功率因數問題自然 備受關注。在節能效應的推廣下,對於功率因數修正的需求始終不斷的成長。如何追求高品質及可靠度的 電源,一直是全球各國亟待達到的目標。然而不停的興建電廠,倒也非解決問題的唯一途徑,除了提高電 力供給之能量外,利用功率因數改善降低峰值電流,把諧波電流減至最低,進而減少配電網的能量耗損, 並提升電氣產品的功率因數(Power factor)或效率,其實才是有效解決問題的方法。在許多的電氣產品中, 因有其內部阻抗特性的關係,使得其功率因數通常較低,假使欲提高電氣產品之功率因數,則必須在電源 輸入端加裝功因修正電路(Power factor correction circuit)。但加裝電路勢必會增加製造成本,而這些費用 到最後還是得由消費者來買單,因此許多廠商在節約成本的考量情況下,常會以較低的價格給客戶端。然 而大多數消費者,也因不瞭解功率因數修正電路對電力品質的重要性,多半認為興建電廠才是解決電力不 足的不二法門,但這卻是大多數開發中國家在電力供應上的一大問題所在[1]。2. 數位雙向控制系統之功因修正轉換器電路架構設計與研製
雙向控制轉換器(Bi-directional Control Converter)是一種藉由控制 MOSFET 功率開關元件之切換,可 使其具有能量雙向流動之功能,因此而有雙向之稱。雙向控制轉換器與其他電力轉換器最大的不同在於其 電路操作時並沒有固定之輸入與輸出端,需根據電路動作時之電流流向去定義其輸入與輸出端位置,其優
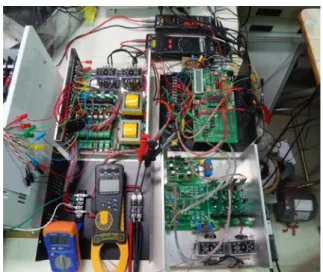
點在於只需一套電路架構,即可允許能量雙向傳遞,應用範圍包含功因修正、市電並聯、再生能源轉換系 統、燃料電池系統、電動車及不斷電系統等等[2-3]。 在本章節中將介紹利用數位方式控制功率因數修正電路之整體架構,針對本論文所研製之硬體設備以 及整體系統實驗結果進行分析。其中硬體部分包含微控制器及單相 AC/DC 功率轉換器電路架構,另有輔助 電路包括電流感測器、LC 低通濾波器電路及橋式整流電路等,而實驗結果的部份將列出實際量測後之功率 因數修正之波形圖。 2.1 電路架構 數位雙向控制之功率因數修正轉換器電路架構示意圖如圖 1 所示,實體圖與電路流程圖則如圖 2 及圖 3 所示。在功率因數修正部份,其輸入電源端與交流市電端連接,藉由自耦變壓器將電源由 0V 調整至 110V, 並經由 LC 低通濾波電路,以銜接單相 AC/DC 功率轉換器電路架構進行切換整流,使其輸出端具有直流輸 出,其中利用抓取交流電壓訊號與輸入電流感測器,並藉由偵測輸出電壓回授訊號至 DSP 內建之轉換模組, 經由微控制器進行程式運算,將 PWM 訊號傳送至單相 AC/DC 功率轉換器電路之 MOSFET 與光耦合器進行 相位同相控制,同時在輸出直流電壓至負載端時則會再將輸出電壓訊號回授至微控制器以確認輸入端之交 流電壓與電流是否因輸出端之影響而趨於同相位,以如此數位控制方式來實現功率因數修正。在 LC 濾波器 電路中,因 LC 濾波電路具有過濾高頻雜訊之作用,因此利用 LC 濾波器電路加以濾波,使輸入端與市電做 連接時,可防止輸入端有高頻之雜訊。而輸入電流感測器部份,當電流流經電流感測器時,電流感測器會 抓取電流訊號以及正電壓訊號予微控制器。 2.2 微控制器與系統電路之數位控制策略
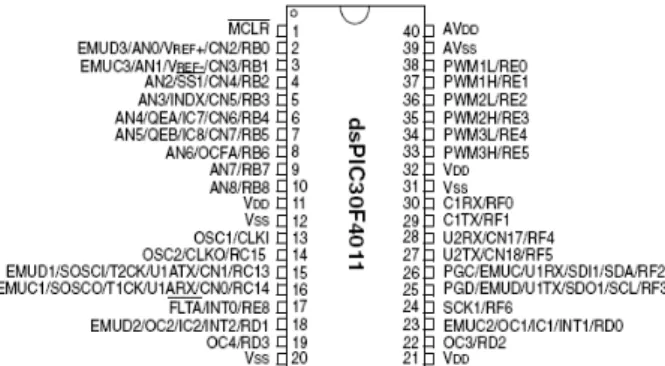
本文所採用之微控制器(Micro Controller Unit, MCU)或稱為數位訊號處理器(Digital Signal Processor, DSP),為一顆 16 位元、接腳為 40Pin 之 Microchip 單晶片 dsPIC30F4011 數位信號處理器,如圖 4 即為本文 所使用之數位訊號處理器實體圖,而其腳位圖則如圖 5 所示。利用微控制器的高速類比數位轉換器(Analog to Digital Converter, ADC)通道功能模組,以及脈衝寬度調變(Pulse Width Modulation, PWM)控制模組, 藉由程式撰寫控制法來完成數位控制器的設計以達到功率因數修正之系統控制目的。而利用微控制器作為 控制單元,必須撰寫控制程式及計算公式,以及從電流感測器與輸出負載偵測回授訊號於控制器內,以提 供處理器作運算處理。除此之外,還需規劃微控制器之 A/D 腳位以電壓、電流回授訊號使用,加上各組電 路所需之閘極驅動 PWM,以完成系統運作。在本文中主要控制部份在於功率因數修正電路,將於以下詳細 介紹。 V U Micro Controller dsPIC30F4011 AC L1 IAC,sense VAC,sense VDC,sense L2 Load PWM Drive Signal C D1 Q1 D2 Q2 圖 1 本論文數位雙向控制之功因修正轉換器電路架構示意圖
圖 2 數位控制功因修正轉換器電路實體圖
圖 3 數位控制功率因數修正轉換器 AC/DC 流程圖
圖 5 dsPIC30F4011 微控制器腳位圖 2.3 整數與浮點運算 對於數位訊號處理器(DSP)而言,在運算上可區分為整數(定點)與浮點運算兩種。這兩種運算的基本 差異在於其各自對於資料的數字表示法不同。以目前 DSP 單晶片而言,都是以整數 DSP 為主,在程式的運 算上嚴格執行整數運算,就會比較不支援浮點運算。而本文中所使用的微控制器即為整數 DSP,因此須將 程式中的變數及運算轉換為整數格式,才能符合整數型控制器之使用。一般數學運算上都有小數點的產生, 因此浮點的運算是避免不了。但對整數型控制器在處理浮點數的運算上,就有可能會拖慢控制器在運算上 的時間,導致中斷設定時間可能已到但運算卻還未完成的情況出現,這樣的情形會使得控制及在運算上發 生問題。所以必須在運算前先將變數與已知的常數轉換為整數形式,如此一來在運算上就不至於產生小數。 而在整數轉換上常用的方式為 Q 格式(Q-Value),此種方式會將所有已知常數及變數先經過正規化後 (Normalize)再乘上(2i-1),且依次方數 i 來稱作是 Q i 格式,例如 23,則稱為 Q3 格式。在本論文中,所 使用的則是為 Q15 格式,其轉換方式可用一刻度轉換的方式表示,如圖 6 所示。從圖中便可看到變數與常 數必須先將之正規化於-1~1 之間,再利用刻度轉換成 Q15 格式於運算中,如此也才能避免小數運算的出現。 在各別電路的軟體規劃中,AC/DC 功率因數修正之軟體控制流程圖,如圖 7 所示。從圖中流程開始時 先初使化計數器(TIMER)、PWM、A/D 模組。當中斷發生後,開始進行執行功率因數修正的控制架構, 並且同步對 VAC、IAC 及 VDC 進行取樣,並進入控制架構中。最後,則為單相 DC/AC 功率轉換器之軟體 控制流程,如圖 8 所示。從圖中可知同樣先進行初始化模組設定,然後利用正弦查表法使得 PWM 之參考 訊號為一正弦波,經比較器後便可產生 SPWM 之訊號。 2.4 數位比例積分控制器之設計 比例積分(PI)控制器又可區分為類比 PI 控制器及數位 PI 控制器兩種。類比 PI 控制器主要利用運算 放大器來實現,而數位 PI 控制器則是利用數位控制器去實現,在本文中即是使用數位 PI 控制器。在使用上 必須先將 PI 頻域方程式經 Z 轉換後,再將之表示為差分方程式,並在列出差分方程式後,供程式撰寫。因 此,其推導差分方程式之過程如下: PI 控制器表示式為,如式(1)所示。
( )
( )
( )
I Pk
U s
G s
k
s
E s
=
+
=
(1) 其中 G(s)為控制器輸出 U(s)與經回授訊號和命令值相減後之誤差量 E(s)之比值。 接著,利用雙線性轉換,如式(2)。並將其代入式(3.9)後,即可將 S domain 轉換為 Z domain,如式(3.11)所示。 (2) 其中 Ts 為取樣時間(Sampling time)。 (3) 圖 6 整數轉換刻度表 圖 7 AC/DC 功因修正控制流程圖 圖 8 DC/AC 功率轉換器控制流程圖 將式(3)展開後,如下:
2
(
1)
(
1)
( )
2 (
1)
P I sK
z
K
T
z
G z
z
×
× − +
× × +
=
× −
(4) 再將式(4)整理後,如下式:(2
)
(
2
)
( )
2
2
P I s I s PK
K
T z
K
T
K
G z
z
×
+
×
+
× − ×
=
−
(5) 接著上、下皆乘z
−1次方,如下: 1 1(2
) (
2
)
( )
2 2
P I s I s PK
K
T
K
T
K
z
G z
z
− −×
+
×
+
× − ×
=
−
(6) 為了簡化方程式與變數,因此由式(7)來取代表示: 1 0 1 1 0 1( )
( )
b
b z
U z
E z
a
a z
− −+
=
+
(7) 其中 1 0 12
2
2
2
o P I s I s Pb
K
K
T
b
K
T
K
a
a
= ×
+
×
=
× − ×
=
= −
將式(7)交叉相乘展開後,如下式: 1 1 0( )
1( )
0( )
1( )
a U z
+
a U z z
−=
b E z
+
b E z z
− (8) 接著,將式(8)具有 z-1 項次轉換為差分方程,如下: 0 1 1 01
( )
(
( )
(
1)
(
1))
u n
b e n
b e n
a u n
a
=
+
− −
−
(9) 其中式(9)即為控制器之輸出方程式,可利用此式來達成控制責任週期的變化。 除此之外,一般在控制器的輸出都會加上限制值避免發散,使之具有控制 PWM 的效果,如式(10)與式 (11)。( )
max( )
maxwhen u n
≥
u
=>
u n
=
u
(10)( )
min( )
minwhen u n
≤
u
=>
u n
=
u
(11) 在本文中,微控制器之切換頻率 fsw與中斷取樣頻率 fs訂定及控制器之 PI 參數設定,如表 1 所示。3. 雙向控制架構之功率轉換器原理與電路
3.1 AC/DC 功率轉換器 本文中採用數位控制之功率因數修正轉換器電路架構主要是由光耦合/隔離電路、單相 AC/DC 功率轉換 器並搭配數位控制器所組成。其中單相 AC/DC 功率轉換器如圖 9 所示,藉由功率晶體的導通來改變電流的 流向,其中控制器將 PWM 訊號送出,利用閘極驅動之光隔離電路將功率晶體所需之控制訊號輸出至單相 AC/DC 功率轉換器,藉此達到功率因數修正之目的。其優點為電流諧波含量小,功率因數高。假設轉換器 的輸出電源端直流側有電容或負載而形成低阻抗,稱之為直流電壓源,相反地,當轉換器的輸出電源端直 流側有電感而形成高阻抗,將視為直流電流源。在本文中主要是以直流電壓源為主,並利用脈波寬度調變 切換技術完成電路設計。 3.2 DC/AC 功率轉換器 單相 DC/AC 功率轉換器主要由 4 顆功率晶體所組成,如圖 10 所示,將一直流電壓轉換成交流輸出電 壓及頻率,稱之為換流器(Inverter)、變流器或是直流/交流轉換器(DC/AC Converter)。其主要是依靠控制 PWM 來達成電路上功率元件的 On 及 Off,並將直流輸入轉換為交流輸出,且也可藉由 PWM 來達成輸出變 壓及變頻之目的,因此也稱為脈波寬度調變型換流器。而換流器依相數,大致可分成單相(Single-Phase) 及三相(Three-Phase)換流器。 對於單相 DC/AC 功率轉換器之橋式電路架構一般又可分為使用兩顆 MOSFET 的半橋式架構與使用四 顆 MOSFET 的全橋式架構,如圖 11 與圖 12 所示。而其半橋式架構與全橋式架構上的不同,在於功率開關 的額定與輸出功率大小之選擇上,也因全橋式比起半橋式的耐流大,為避免同上、下臂功率開關發生短路 之情況,原則會加入空白時間(Dead time)。通常一般單相 DC/AC 功率轉換器電路用來控制功率開關元件 的切換方式可區分為雙極性脈波寬度調變技術與單極性脈波寬度調變技術兩種,當利用單極性切換技術來 達成時,其優點在於切換頻率可等效提高一倍,使輸出電壓最低諧波出現在兩倍切換頻率之邊帶上,如此 也能較易設計輸出濾波器;單極性切換技術原理將在後續文章中介紹[4]。 表 1 微控制器參數設定 功因修正控制器 切換頻(f
sw) 35 kHz 取樣頻(f
s) 20 kHz _ P vK
、K
I v_ 327、327V U AC L1 L2 Load C D1 Q1 D2 Q2 圖 9 單相 AC/DC 功率轉換器電路圖 V U AC L1 L2 Load C Q1 Q3 Q2 Q4 圖 10 單相 DC/AC 功率轉換器電路圖
2
SV
2
SV
1Q
2Q
SV
U
V
1Q
SV
3Q
4Q
2Q
U
V
圖 11 半橋式 DC/AC 功率轉換器電路 圖 12 全橋式 DC/AC 功率轉換器電路 本文中選用型號 IRFP460A 來作為功率切換開關使用。此外為了使得輸出電壓為正弦波,須加入濾波器 來濾除開關切換的雜訊干擾,及抑制其他頻率的諧波成份。在本文中,即利用電感與電容組成的 LC 二階低 通濾波器(Low-Pass Filter)來做消除高次諧波之濾波器電路,以獲得較佳之輸出波形。以下為 LC 濾波器 電路的設計與計算過程: LC 濾波器的轉折頻率 fc 的計算,如式(12)所示。一般轉折頻率需小於開關切換頻率 fs 的 1/5~1/10,因 此如下式(13)所示。1
2
cf
LC
π
=
(12)20
2.0
10
10
s cf
k
f
<
=
=
kHz
(13) 系統額定輸入電壓為 110V(rms)、輸出直流電壓 311V,額定功率為 600W。負載電流峰值可得: ,600
2
2
2.7283( )
110
o peakP
I
A
V
=
× =
×
=
(14) 電感電流的漣波需小於負載電流峰值的 20%,因此: 表 2 單相 AC/DC 功率轉換器元件參數 濾波電容 100/25V 光耦合器 TLP250 穩壓電容 470/250V 功率電晶體(Q
1~Q
4) IRFP460A 濾波器電感L
o 10mH 濾波器電容C
o 1.0 Fµ 圖 13 單相 AC/DC 功率轉換器實體圖 ,0.2
0.54567( )
L o peakI
I
A
∆ =
×
=
(15) 將上述計算結果與規格代入式(16)可計算電感值。311
7.124
4
4 0.5456 20
DC L sV
L
mH
I
f
k
≥
=
=
× ∆ ×
×
×
(16) 為了配合可取得的電感與電容元件值,所以電感值選取大於 7.124mH、電容值選取 1.0uF,再經由下式 計算轉折頻率: 3 61
1
1.59
2.0
2
2
10 10
1 10
kHz
kHz
LC
π
=
π
×
−× ×
−=
<
(17)從式(17)結果發現計算後之轉折頻率小於 2.0kHz,因此可利用此規格來進行 LC 濾波器電路之設計。表 2 為單相 AC/DC 功率轉換器電路元件設計參數。而實際電路實體圖則如圖 13 所示(僅用其中兩顆 MOSFET)。
4. 功因修正與諧波失真之波形量測結果分析
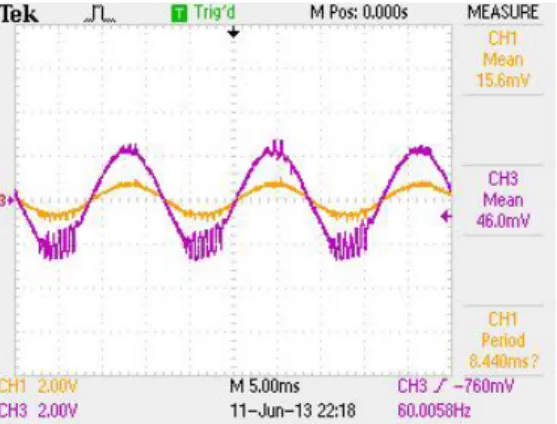
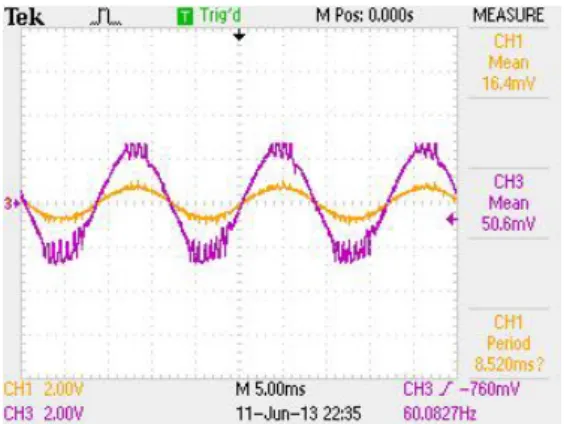
本章節將介紹本文之功率因數修正轉換器之電路實驗,其所量測到之功率因數 PF 及諧波失真 THD 之 實驗結果分析。 4.1 功因修正波形量測結果分析 圖 14 至圖 18 分別為在輸入電壓為 110Vac時,輸出負載功率為 120W、240W、360W、480W、600W 之輸入市電電壓 Vgrid和市電電流 Igrid之波形圖。其中 CH1 為 Vgrid之波形圖,CH3 為 Igrid之波形圖。在經過微
控制器程式演算與 MOFFET 調整相位之下,使得市電電流與市電電壓相位得以趨近於同相,當輸出負載低 時相位同相,當輸出負載為高時相位亦同相,而不會因輸出負載變高使得電壓與電流的相位產生位移。
圖 14 輸出負載功率 120W 之輸入電壓與電流波形圖
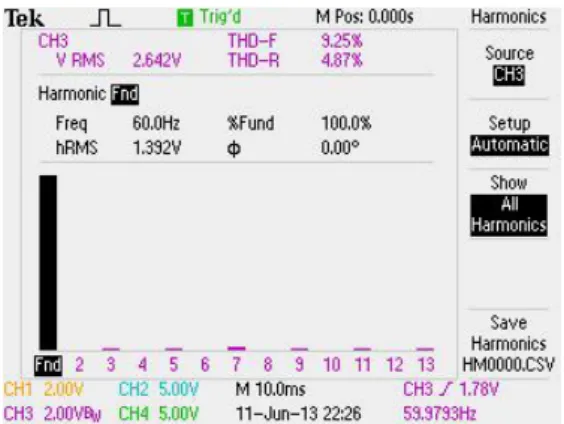
圖 16 輸出負載功率 360W 之輸入電壓與電流波形圖 圖 17 輸出負載功率 480W 之輸入電壓與電流波形圖 4.2 諧波失真波形量測結果分析 圖 19 至圖 23 分別為在輸入電壓為 110Vac時,輸出負載功率為 120W、240W、360W、480W、600W 之 諧波失真波形圖。當諧波失真隨著輸出負載的升高而升高時,在輸出負載最低 120W 時為 4.87%,而在輸出 負載最高 600W 時為 7.31%,差異僅僅只有 2.44%。顯示隨著輸出負載升高,雖然有時可能因材料系數誤差 的關係造成實驗上的誤差,但也由於差異不大,所以整體來說都有在可以接受的範圍之內。 圖 18 輸出負載功率 600W 之輸入電壓與電流波形圖
圖 19 輸出負載測試(120W)功因修正後諧波失真頻譜圖
圖 20 輸出負載測試(240W)功因修正後諧波失真頻譜圖
圖 21 輸出負載測試(360W)功因修正後諧波失真頻譜圖
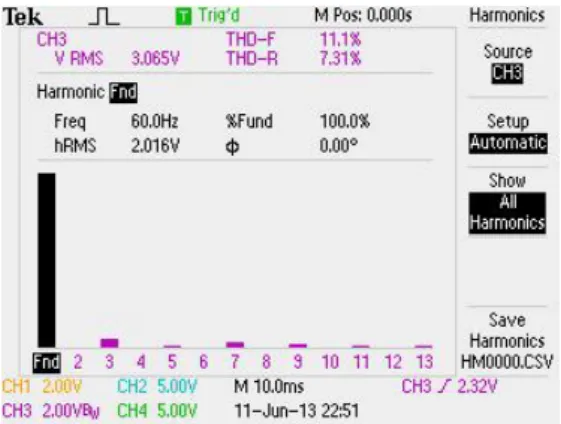
圖 23 輸出負載測試(600W)功因修正後諧波失真頻譜圖 最後則將重點量測數據整理如表 3。 表 3 為輸入電壓 110Vac時各輸出負載功率下之 Eff (%)、PF 及 THD(%) Po(W) PF Eff (%) THD(%) 120W 0.99909 34.87 4.87 240W 0.99899 52.77 6.47 360W 0.99974 67.51 5.54 480W 0.99858 81.46 5.52 600W 0.99953 85.23 7.31
5. 功率因數與波峰因數之參數最佳化設計與分析
本章節將進行功因修正中,功率因數(Power Factor, PF)之最佳參數設計與分析。在本文中利用田口 法以應用於設計單一目標考量下之最佳參數組合設計。同時也考量若以多目標作為設計時,可運用多品質 特性在衡量指標(Multiple Performance Characteristics Index, MPCI)上之模糊推論田口法(Fuzzy Based Taguchi method)[5]來當作最佳化參數設計方法。最後,將從最佳化方法中,對參數組合與設計目標之結果 進行比對與比較,並從中瞭解及獲得 PF 之最佳參數組合設計。5.1 田口品質設計
田口品質工程法,是由日本田口玄一博士於 1950 年代所提出的一項實驗計劃法,又名田口法(Taguchi Method),其優點是利用少量實驗數據進行廣泛實驗趨勢的分析,且能有效改善製程藉以提升加工品質。田 口法亦稱為田口式品質工程(Taguchi Quality Engineering),同時也是目前最常被應用在許多最佳化的設計 當中,除了應用於改善品質工程外,更常見於被利用在其他各領域中作為最佳化目標並獲得最佳參數組合 設計之最佳化問題,且其設計結果通常都能實現相當的可靠度及最佳的品質改善。也因此得以被業界及學 術界認定為提升產品品質的最佳方法之一[6]。
而田口法主要是經由實驗設計的方式來進行系統參數之最佳化設計,除較重視實際應用性外,基本上 不以繁雜及困難統計為依歸,所以又稱穩健參數設計(Robust Parameter design)[7]。此設計利用工程最佳 化的方式進行品質改善之方法,而穩健即是指當設計者在受到環境影響時,能在同樣操作條件下使得設計
目標的敏感度最小,亦即降低變異原因的影響。然而環境影響通常也可能是設計者無法掌握的因素,因此 又稱噪音因數(Noise Factor),其可使變異數不至於為零。所以田口法就是被用來降低變異以達到改善品質 的方式,並使得設計目標對變異的來源最不敏感。
然而在田口實驗設計上,最主要之重點及工具在於直交表實驗(Orthogonal Array Experiment)及信號 雜音比(Signal to Noise Ratio,S/N ratio)[8-9]兩者。當在直交表實驗的應用上時,只需利用部分因數實驗 即可達到全因數實驗之目的。所謂因數實驗(Factorial Experiment),主要是經由設計及收集所檢視之觀測 值以及探討研究各種潛在因數間對於品質特性的影響及效果。當實驗設計必須考量所有因數水準可能出現 之組合時,即稱此設計為全因數實驗;若只利用其中一部分來進行實驗,則稱此設計為部份因數實驗。在 全因數實驗中,當水準數或因數數目增加使得實驗次數變得很多時,便需考慮使用部份因數實驗,但是當 部份因數實驗可能無法檢出各因數間之交互作用並保證實際設計條件能獲得實驗結果的再現性時,則必需 搭配直交表實驗之因數規劃,來使得數據獲得更有力的論證。至於信號雜音比部份便是將各因數實驗中之 反應平均值及反應變異數統整為單一指標,使每次因數實驗時能夠反應其品質優劣之指標。 5.2 功率因數 PF 最佳化實驗之田口方法分析 本內容是應用田口品質工程,分析量測參數對於軟體設計所需達到的目標函數及限制條件的影響,進 而利用穩健最佳化法則及田口最佳化方法,分別求得最佳組合,並做一比較,以期能達到功率因數 P 望目 值符合趨近於 1.0 之期待,在本章節中定義功率因數之角度為電流波形落後電壓波形時之相位差。而田口法 的主要控制因數如表 4 所示。 其中,A 因數為交流端電容值(uF)、B 因數為電感值(mH)、C 因數為輸出功率(W)。由上述因數設計過 程之中,並採用 L9(33)為本實驗配置之直交表,進行九次田口實驗模擬數據。而整個實驗配置與模擬結果 如表 5 所示。 由式(18)至式(26)可得如表 6 所示之回應表。
(
1 2 3)
13
1
A
=
η
+
η
+
η
(18)(
4 5 6)
23
1
A
=
η
+
η
+
η
(19)(
7 8 9)
33
1
A
=
η
+
η
+
η
(20)(
1 4 7)
13
1
B
=
η
+
η
+
η
(21)(
2 5 8)
23
1
B
=
η
+
η
+
η
(22)(
3 6 9)
33
1
B
=
η
+
η
+
η
(23)(
1 6 8)
13
1
C
=
η
+
η
+
η
(24)(
2 4 9)
23
1
C
=
η
+
η
+
η
(25)(
)
3 3 5 71
C =
η + η + η
3
(26) 由圖 24 各因數之 SNR 回應表可得知三因數之最佳組合為 A1B3C2,由於最佳組合不在直交表裡,因此 須再作確認實驗,以 A 因數為交流端電容值 1.0uF、B 因數為電感值 9.0mH 及 C 因數為輸出功率 360W,如 表 7,然後做再次確認實驗,其得到的結果分別為 0.995、0.998、0.997,並將這三筆取平均值得到值為 0.996, 如表 8,確實為所有資料中最接近目標值趨近於 1.0。 表 4 主要控制因數 水準 因數 水準一 水準二 水準三 A. 交流端電容值(uF) 1.0 5.0 9.0 B. 電感值(mH) 1.0 5.0 9.0 C. 輸出功率(W) 120 360 600 表 5 功率因數 PF 之模擬結果配置 L9 A B C 實驗值y
平均值 平均平方差 訊噪比 1 2 3y
MSDη
1 1 1 1 0.991 0.998 0.996 0.995 47895 27.9966 2 1 2 2 0.986 0.992 0.978 0.985 47900 35.1968 3 1 3 3 0.912 0.882 0.901 0.898 47938 36.7581 4 2 1 2 0.879 0.849 0.871 0.866 47952 36.4882 5 2 2 3 0.909 0.962 0.938 0.936 47921 22.9326 6 2 3 1 0.918 0.911 0.959 0.929 47924 21.0939 7 3 1 3 0.996 0.871 0.853 0.906 47934 22.6909 8 3 2 1 0.938 0.957 0.987 0.961 47910 24.2686 9 3 3 2 0.909 0.908 0.864 0.893 47940 32.2303 表 6 功率因數 PF 之模擬結果回應表 因數 水準 A B C 1 33.3172 29.0586 24.4530 2 26.8382 27.4660 34.6384 3 26.3966 30.0274 27.4605 Max-Min 6.9206 2.5614 10.1854而經由實驗數據所轉換成之各因數 S/N 圖如圖 24 所示。
S/N
0.0000 5.0000 10.0000 15.0000 20.0000 25.0000 30.0000 35.0000 40.0000(A1) (A2) (A3) (B1) (B2) (B3) (C1) (C2) (C3)
因子(水準) 圖 24 功率因數 PF 因數(水準)組合之回應圖 表 7 功率因數 PF 最佳組合確認實驗參數表 因數 參數 A B C 參數 1.0 9.0 360 表 8 功率因數 PF 最佳組合確認實驗結果表 A1B3C2 y1 y2 y3 平均值 功率因數(PF) 0.995 0.998 0.997 0.996 表 9 功率因數 PF 之變異數分析 因數 變動(SS) 自由度(DF) 變異(VA) 純變動(SS) 變異比(VR) 貢獻度(
ρ
) A 90.066 2 45.0329 90.0658 1.429578 27.5083 B 10.036 2 5.0179 10.0350 0.2 3.0652 C 164.31 2 82.1548 164.3096 2.6080 50.1841 e 63.002 2 31.5008 63.0017 - 19.2422 T 327.41 8 - 264.411 - 100.0000 從回應表與實驗數據之結果推估最佳解之訊噪比情況,如式(27)。(
(1) (3) (2))
2
avg optimal A B Cη
=
η
+η
+η
− ×
η
(27)= (33.3172 + 30.0274 + 34.6384) 2 (28.8507) = 40.2817
optimalη
− ×
其中(27.9966+35.1968+36.7581+36.4882+22.9326+21.0939+22.6909
+24.2686+32.2303) / 9
28.8507
avgη
=
=
從式(27)推估的訊噪比約為 40.2817 比其他 9 筆數據來的好,確實為最大值、最佳組合。接著,再進行 變異數分析,其分析結果如表 9,其中 e 為誤差,T 為總和。由表 9 可得到 A 因數、B 因數與 C 因數之貢 獻度分別為 27.5083%、3.0652%與 50.1841%,結果可看出 A、B、C 三因數對變異數變動量都有貢獻,其中 又以 A 與 C 此二因數貢獻最大,即為影響功率因數 PF 之主要參數因數。6. 結 論
本研究是利用田口法及雙反應曲面法來對功率因數修正下之功率因數與波峰因數,做參數最佳化的實 驗設計及研究探討。終於在不斷努力的研究實驗後,發現利用適當且有效率的實驗手法,確實能有效達到 趨近功率因數之理想為 1.0 之目標值。而在本研究下之功率因數一直是影響整個實驗核心的關鍵原因之一, 當然也一直影響著諧波失真與效率方面的改善。因此本研究確實能利用實驗設計手法(田口法),使得諧波 失真得以降低並達到提高功率因數之目的,如此可提升市電端供給之能源進而得以有效率的被用戶端運 用,而不至於造成能源上之浪費。 在本文中的實驗執行上是利用不同參數之電感、電容與輸出負載來進行實驗,且透過示波器、電流鉤 表及三用電表等量測及分析工具來確認每次實驗所得到的結果,然後再將此結果利用最佳化實驗設計法來 探討與分析最佳參數組合。透過一連串的實驗與分析,得到下列的結果。此外,使用田口做分析,可得知 不管是對功率因數或波峰因數,其最佳化的參數組合都落在所挑選的參數組合 A1B3C2,亦即交流端電容值 為 1.0uF、電感值為 9.0mH 及輸出功率 360W。參考文獻
[1] 宋自恆、林慶仁,“功率因數修正電路之原理與常用元件規格”,新電子科技雜誌,第 217 期,2004。[2] M. K. Kazimierczuk, D. Q. Vuong, “Topologies of Bidirectional PWM DC-DC Power Converters”, IEEE Proceedings Aerospace and Electronics Conference, pp.435–441, May. 1993.
[3] F. Caricchi, F. Crescimbini, F. G. Capponi, and L. Solero, “Study of Bidirectional Buck-Boost Converter Topologies for Application in Electrical Vehicle MotorDrive”, Proceedings of IEEE APEC’98 13st Annual Applied Power Electronics Conference and Exposition, pp.287–293, Feb. 1998.
[4] T. S. Wu, M. D. Bellar, A. Tchamdjou, J. Mahdavi and M. Ehsani, “A review of soft-switched DC-AC converters”, IEEE on Industry Applications Conference, vol. 2, pp.1133–1144, Oct. 1996.
[5] 江瑞利、王啟全、周孝龍、李榮原、江瑞安,“運用模糊田口法於永磁式同步馬達之最佳設計”,中華民國第二十 九屆電力工程研討會,台南,2008。
[6] 葉怡成,實驗計劃法–製程與產品最佳化,五南:台北,2001。
[7] Y. Wu, and A. Wu, “Taguchi Methods for Robust Design”, ASME Press, New Youk, 2000. [8] Barker, Quality Engineering by Design: Taguchi’s Philosophy, Quality Progress, T.B, 1986.
[9] Koyamada, K. Sakai, and T. Itoh, “Parameter Optimization Technique Using The Response Surface Methodology”, Annual International Conference of the IEEE EMBS, San Francisco, CA, USA, 1-5, pp.2909–2912, Sept. 2004.
[10] S.K. Fan and E.D. Castillo, “Calculation of an Optimal Region of Operation for Dual Response Systems Fitted from Experimental Data”, Journal of the Operational Research Society, pp.826–836, 1999.