國
立
交
通
大
學
電機與控制工程學系
碩
士
論
文
應用於液晶顯示器背光之發光二極體驅動與均流控
制電路之設計
The Design of a LED Driver with Current Balance Control Circuit
for the Backlight of LCD Display
研 究 生:邱佳麟
指導教授:陳福川 博士
陳科宏 博士
應用於液晶顯示器背光之發光二極體驅動與均流控制電路之設計
The Design of a LED Driver with Current Balance Control Circuit
for the Backlight of LCD Display
研 究 生:邱佳麟 Student:Chia-Lin Chiu
指導教授:陳福川 Advisor:Fu-Chuang Chen
陳科宏
Advisor:
Ke-Horng Chen
國 立 交 通 大 學
電 機 控 制 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Electrical and Control Engineering
College of Electrical Engineering
National Chiao Tung University
in partial Fulfillment of the Requirements
for the Degree of
Master
in
Electrical and Control Engineering
October 2008
Hsinchu, Taiwan, Republic of China
應用於液晶顯示器背光之發光二極體驅動與均流控制電路之設計
研究生:邱佳麟
指導教授:陳福川博士
指導教授:
陳科宏博士
國立交通大學電機與控制工程研究所碩士班
摘 要
由於發光二極體各項應用起飛,包括大型看板、車用發光二極體與背光源使用逐年 提高,照明商機逐漸提高。特別是在 NB 面板方面,就光源成本來看,雖然發光二極體 約為 CCFL 的 2.5 倍,總成本約高出 70%,但採用發光二極體背光源優點為: 省電,將提 升 NB 約 40~60 分鐘使用時間 ; 輕薄,背光模組約可節省一半厚度 ; 重量較輕 ; 色彩 飽和度較佳。 液晶顯示技術往液晶電視快速發展的契機受限於數位顯示技術發展,而在液晶電視 尺寸大型化後,必須在成本上降低,才能夠與傳統電視以及電漿電視相競爭。並且,液 晶顯示技術本身為一種非自發光型的顯示技術,需依賴著背光源才能夠把影像顯示出 來,在面板的應用上,背光源通常需要大量的發光二極體來提供光源,因此若能有效率 佳且負載能力好之驅動電路則將可降低系統成本。 本篇論文中提出應用於液晶顯示器背光之發光二極體驅動與均流控制電路之設 計,其輸入電壓為 12V,而輸出電壓為 40V。其中回授控制電路以脈波寬度調變之方式 實現,並擁有根據發光二極體順向電壓改變的回授機制,使此電路能夠提供更高的可靠 度,供發光二極體作為背光源使用。另外由於考量發光二極體作為背光源所需要的電流 匹配度,均流控制電路也一併於本論文中提出。本論文之設計使用 VIS 0.5um 嵌入高壓 5V/40V 2P3M CMOS 製程技術進模擬與製作。The Design of a LED Driver with Current Balance Control Circuit
for the Backlight of LCD Display
Student: Chia-Lin Chiu
Advisor: Dr. Fu-Chuang Chen
Advisor:
Dr. Ke-Horng Chen
Department of Electrical and Control Engineering
National Chiao-Tung University
Abstract
The commercial possibilities of the LED are increasing gradually since the applications of light-emitting diode are more and more prevalent in large scanning boards, vehicle-used light-emitting systems and backlighting-used display systems. Considering the cost of light source in the panel of notebook computer, the cost of light-emitting diode is 2.5 times than that of the cold cathode fluorescent lamp (CCFL). That is, it costs more than 70% of the original design. However, there are some important advantages by means of LED as a backlight module. Especially, energy saving improves the battery lifetime longer than 40% of the original design by means of CFFL backlight module. The LED backlight module can reduce the thickness of panel module. Thus, the weight is light and the color saturation is better than before. The impeding of liquid crystal display technique expending to the liquid crystal television is the developing of the digital display technique. After scaling up the size of the liquid crystal television, it should lower the cost to compete with the conventional television and plasma television. Besides, the liquid crystal display is a non-self-luminous technique and thus it leans on the backlight source to display the image. In the applications of the LCD panel, the backlight source usually needs large amount of light-emitting diodes to provide enough brightness. Therefore, if the driver circuit has high efficiency and good driving capability, the cost of the LED system can be reduced.
This thesis proposes a LED driver with current Balance control circuit for the backlight of LCD display. This driver circuit design was simulated and fabricated in VIS 0.5µm embedded high voltage 5V/40V CMOS technology. The input voltage is 12V and the output voltage is 40V. The boost voltage regulator uses a pulse width modulation (PWM) and a reference tracking circuit according to the variation of forward voltage of LEDs. The advantage of the proposed method is to offer high reliability to the LED backlight system.
誌謝
金風飛颺,落英繽紛,微涼秋意拂掃肌膚,猛然驚覺,時光荏苒,我已走過 2 年光 陰。回首這些日子,快樂也好,辛苦也罷,就像走在沙灘上的腳印,刻骨銘心,雋永猶 存,一切地努力將隨著這篇論文的誕生開花結果,但我知道,這不是終點,而是開始綿 延的起點。 在研究所兩年的日子裡,首先需感謝陳科宏博士的悉心指導。老師如同辛勤園丁, 不斷給予我親身磨練的機會,在研究上更是耐心地回答我每一個問題,無論是書面報 告、投影片、論文、IC 製作等,他都不厭其煩地指點迷津,俾利我釐清錯誤觀念,日新 又新。 再者,還需感謝玓玓學姊、詠竣學長,在我初踏入電源管理 IC 的領域時,給予我 許多寶貴的意見、鼓勵與啟發。 感謝我的同窗好友,家祥、維倫、鼎容、韋任,因為有你們的分享與照顧,這兩年 的生活可謂多采多姿,實驗室生活的悲歡喜樂我們一同走過,很開心也很榮幸這兩年有 你們的陪伴; 感謝 逢哥、國林、小柯在 layout 上面不厭其煩的給我們指導,讓我在 layout 上得以進步。 我的室友們:無力、建穎、怡文、世昌,跟你們當室友的日子真的很開心,謝謝你 們兩年來的陪伴與照顧。 感謝一直以來陪伴我的老友 江謝、瑋翔、小吳、皓宇、西西、阿秀、史周,因為 有你們的陪伴與鼓勵,才能讓我在充滿壓力的研究所生涯中,多了一個舒緩情緒的管道。 感謝我的父母,辛苦工作讓我得以無憂無慮唸完研究所,我將會盡其所能,為社會 進一份心力。謝謝弟弟三不五時的噓寒問暖。最後感謝女友瀞儀,妳的陪伴讓我能把心 專注在研究上,遇到困難時還有妳的鼓勵,陪我一起渡過。感謝所有在我這兩年求學生 涯中給予協助的人,有了你們的建議及協助,我才得以學習成長、茁壯。 站在巨人的肩上遠眺,我發現,這所有的感動將匯集成助力,期望某一天, 我得以輕舞飛揚,抓住夢想。 邱佳麟 2008.11.06Contents
Chapter 1 ... 1
Introduction ... 1
1.1. Background...1
1.2. The Basic Concepts of Current Regulators ...2
1.3. Voltage Regulators Classifications ...4
1.3.1. Linear Regulator ...4
1.3.2. Switching capacitor Voltage regulator...6
1.3.3. Switching Regulator ...7
1.3.4. Comparison of voltage regulators...8
1.4. Motivation ...9
1.5. Thesis Organization ...9
Chapter 2 ... 10
Basic concepts of Switching Regulator ... 10
2.1. Basic Switching Regulator Topologies...10
2.2. Modulation Technologies ... 11
2.2.1. Pulse Width Modulation (PWM)...12
2.2.2. Pulse Frequency Modulation (PFM) ...12
2.3. Analysis of current mode Boost Switching regulator...13
2.3.1. The Operation Theorem of Current Mode Control ...13
2.3.2. Oscillation for D>0.5...14
2.3.3. Ramp Compensation ...17
2.3.4. Continuous Conduction Mode (CCM) ...19
2.3.5. Discontinuous Conduction Mode (DCM) ...21
2.3.6. Current Mode Controller Model...23
2.4. Compensator Design for DC-DC Converter ...26
Chapter 3 ... 28
LED Driver with Current Mode DC-DC Converter... 28
3.1. The Proposed LED Driver with Current-Mode Boost Converter...28
3.1.1. The Design Theorem ...29
3.1.2. Operation Principle of Soft-Start and Reference Tracking...30
3.1.3. PWM Dimming Consideration...31
3.1.4. Load Dependent Minimum Drain with Constant Current Sink...33 3.2. The Proposed Soft-Start and Reference Tracking Implementation and Simulation
Result 34
3.2.1. Detection Clock Generator ...35
3.2.2. Voltage Drop on Constant Current Sink Detection Circuit ...37
3.2.3. Reference Tracking Circuit...40
3.2.4. Soft-Start End-Point Detection ...41
3.3. Load Dependent Minimum Drain Circuit ...43
3.3.1. Constant Current Sink Current ...43
3.3.2. Load Dependent Minimum Drain Circuit ...44
Chapter 4 ... 47
The system implementations and simulation results ... 47
4.1. Bandgap Reference and Bias Circuit...47
4.2. Ramp and Clock Generator ...49
4.3. Voltage to Current Converter...51
4.4. Error Amplifier ...53
4.5. Level Shift Buffer ...54
4.6. Compensator Design ...56
4.6.1. The concept of compensation resistance ...56
4.6.2. The concept of compensation capacitor ...57
4.7. Soft-Start Simulation ...59
4.8. Whole Chip Simulation ...59
4.9. Load regulation, Line regulation ...63
4.9.1. Line Regulation ...63
4.9.2. Load Regulation ...64
4.10. Die photograph ...65
Chapter 5 ... 67
Conclusions, Experiment Results and Future work ... 67
5.1. Conclusions ...67
5.2. Measurement Module ...68
5.3. Future Work ...68
Figure Captions
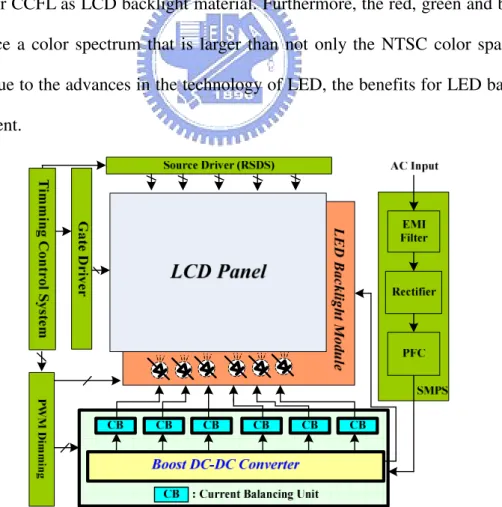
Fig. 1. LED backlight driving block diagram...1
Fig. 2. I-V curve characteristic of LED ...2
Fig. 3. A simplified current regulator for LED driver...3
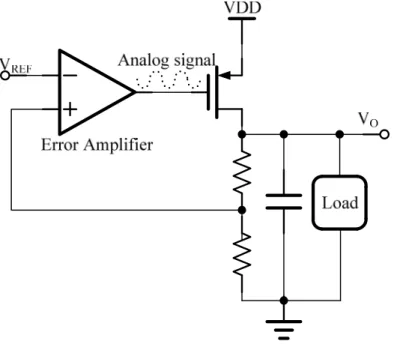
Fig. 4. The basic structure of linear regulator...5
Fig. 5. The basic structure of switching capacitor voltage doubler ...6
Fig. 6. The basic architecture of switching regulator. ...8
Fig. 7. The basic structure of buck converter ...10
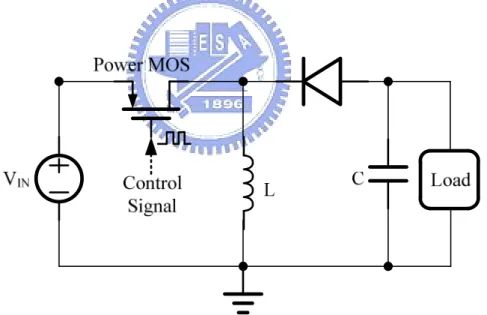
Fig. 8. The basic structure of boost converter... 11
Fig. 9. The basic structure of buck-boost converter. ... 11
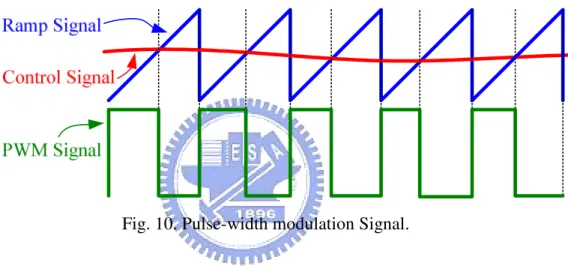
Fig. 10. Pulse-width modulation Signal. ...12
Fig. 11. Pulse-frequency modulation Signal...13
Fig. 12. Diagram of current mode boost converter...14
Fig. 13. Perturbed inductor current waveform ...15
Fig. 14. Inductor waveform in stable and unstable situation without compensation ramp. ...17
Fig. 15. Perturbed inductor current waveform with ramp compensation...18
Fig. 16. (a) Equivalent circuits of the first subinterval in CCM. (b) Equivalent circuits of the second subinterval in CCM ...20
Fig. 17. Equivalent circuits of the third subinterval in DCM ...21
Fig. 18. Operation waveform of boost converter in DCM. ...22
Fig. 19. The relationship between the average inductor current and control voltage...23
Fig. 20. Small signal model of current mode dc-dc boost converter...24
Fig. 21.The compensator of current dc-dc converter...26
Fig. 22.The proposed LED driver with current-mode boost converter ...28
Fig. 23. (a) Case I: Two LED strings having the same forward voltage. (b) Case II: Two LED strings having different forward voltage. ...29
Fig. 24.The proposed LED driver with current-mode boost converter ...31
Fig. 25. (a) Analog dimming for LED current. (b) Digital dimming for LED current...32
Fig. 26. (a) Inrush current control method. (b) The LED current with and...33
Fig. 28.The proposed LED driver with current-mode boost converter ...34
Fig. 29.The one period detection clock generator circuit ...35
Fig. 30.The two periods detection clock generator circuit ...35
Fig. 31.The simulation result of CK1A ~ CK6A...36
Fig. 32.The simulation result of CK12A ~ CK16A...36
Fig. 33.Voltage drop on constant current sink detection circuit ...37
Fig. 34.(a) Detection signal for the first LED sting (b)Output signals of the detection circuit 39 Fig. 35.Voltage drop on constant current sink detection circuit ...40
Fig. 36.Soft-start end-point detection ...41
Fig. 37.The simulation result of soft-start end-point detection ...42
Fig. 38. Constant current sink circuit ...44
Fig. 39. Constant current sink circuit with load dependent minimum drain technique...45
Fig. 40. The circuit structure of bandgap reference...48
Fig. 41. The simulations for the bandgap voltage reference circuit that varies supply voltage, operating temperature and process variation. ...49
Fig. 42. The circuit structure of ramp and clock generator...50
Fig. 43. The simulation result of the ramp and clock generator. ...51
Fig. 44. Voltage to current converter...52
Fig. 45. Simulation result of voltage to current converter...53
Fig. 46. The circuit structure of error amplifier...54
Fig. 47. The simulation result of error amplifier. ...54
Fig. 48. Level shift buffer. ...55
Fig. 49. The simulation result of level shift buffer. ...55
Fig. 50. Soft-start waveform...59
Fig. 51. The waveform of VOUT and IL with PWM dimming...60
Fig. 52. The waveform of VCH, VTH, and VTL with PWM dimming...60
Fig. 53. The LED current with PWM dimming. ...61
Fig. 54. The LED current with PWM dimming. ...61
Fig. 55. The output of boost, LED current and inductor current without PWM dimming...62
Fig. 56. Zoom in for 3.71ms to 3.8ms of Fig.53. ...62
Fig. 58. Line regulation waveform. ...64
Fig. 59. Load regulation waveform. ...64
Fig. 60. The die photograph...65
Table Captions
TABLE I Comparison of voltage regulators...8
TABLE II State table of soft-start and reference tracking circuit...35
TABLE III The relationship between input and output signals...40
TABLE IV The operations of reference tracking ...41
TABLE V The constant current sink circuit without load depend minimum drain circuit ...46
TABLE VI The constant current sink circuit with load depend minimum drain circuit ...46
Chapter 1
Introduction
1.1.
Background
In the past, the back light module of liquid crystal display (LCD) was mainly consisted of cold cathode fluorescent lamp (CCFL). However the CCFL does not have a good color space and its lifetime is just about 15000~50000 hours. Furthermore, there are some environmental issues in CCFL backlighting because it has hazardous material inside the lamp [1] [2] [3]. For the reasons, technology has been going through a transition which LED substitutes for CCFL as LCD backlight material. Furthermore, the red, green and blue (RGB) LEDs produce a color spectrum that is larger than not only the NTSC color space but also CCFL [4]. Due to the advances in the technology of LED, the benefits for LED backlight has become evident.
The common LED backlight structure is usually like Fig. 1. It is composed of two parts. Firstly, boost DC/DC converter is to offer a sufficient voltage to overcome the LED forward voltage. Secondly, current balance unit is to regulate the current flow through each LED string and also have PWM dimming circuit to change the illumination through averaging the driving current. The current regulator also includes a minimum voltage detector and open loop detector for boost converter to dynamically regulate the output voltage, thus it can reduce unnecessary power loss.
1.2.
The Basic Concepts of Current Regulators
The LED I-V curve is shown in Fig. 2. [5]. The forward voltage variation of LEDs is expected. LED can be manufactured with smaller mismatch, but it will increase the cost. Beside, the forward voltage also varies with temperature and time. In order to get high quality image for LCD TV, it is impossible to change the backlight brightness through forward voltage. In other words, the luminance is proportional to the level of driving current. The higher driving current will cause the higher brightness. As a result, by using the current to dimming the LEDs can prevent the variation of forward voltage and increase the brightness uniformity of LED backlight. Therefore, a high quality image of LCD TV can be obtained.
The most common method to drive LED current is shown in Fig. 3. A simple current regulator is implemented for LED strings. This circuit includes operational amplifier, a reference voltage, VREF, and the external resistor, REXT. The LED current can be determined by
the external resistor. It uses the constant-current source to regulate LED strings [6] [7].The constant-current source eliminates LED current changes due to variations in forward voltage. The constant-current source produces the constant LED brightness and strings uniformly. In this configuration LEDs can be connected in series and parallel to keep an identical current flowing in each LED, due to the LED current ILED1~ ILEDn are produced by the value, VREF
/REXT. Therefore, if the external resistances are matched, this circuit can increase the current
matching ability between channels.
Fig. 3. A simplified current regulator for LED driver.
Another important issue is LED dimming control. LED dimming control is needed in many applications. In application of LCD backlighting, dimming provides brightness and contrast adjustment. In general, two types of dimming methods can be achieved, analog and pulse width modulation (PWM) [4]. In analog dimming, the changing of LED’s forward current can change the brightness. For example, if an LED is at full brightness with 20 mA of forward current, then 50% of the brightness is achieved by applying 50% of the maximum current to the LED. However, the drawback with analog dimming is that changes in forward
current cause LED’s color shift. This color shift may become unacceptable in displays requiring a true color representation. On the other hands, PWM dimming is achieved by applying full current to the LED at a modulated duty cycle. The LED brightness is controlled by adjusting the relative duty cycle. For example, 50% brightness level is achieved by turning the LED on time at full current for 50% of each period. The advantage of PWM dimming is that the forward current is always constant, so we just have to decide the maximum current for all the LED strings. Instead of analog dimming, by using this method, LED color does not vary with brightness. In order to keep the human eyes from seeing the LED turn on and off, the switching speed must be above 100 Hz. Therefore, the proposed method also includes the PWM dimming control circuit to maintain the benefits of PWM dimming. In order to eliminate the inrush current occurred at the instance of string turn on, we also proposed a delay method to reduce it. By using the delay method, the on time of all the strings will be split into several parts. In other words, turning on the strings gradually can reduce the charge current at the moment. The proposed circuit not only balances the current for LED strings but also is suitable for PWM dimming control.
1.3.
Voltage Regulators Classifications
General power supply circuits can be classified into three kinds of regulator, such as linear regulators, switched capacitor circuits, and switching regulators. The technologies will be briefly introduced and described as following subsections. Furthermore, we will make a comparison for why we choose boost converter as the power supply unit of LED driver. The considerations of voltage regulators include low quiescent current consumption, low noise, high conversion efficiency, low cost, and so on.
1.3.1.
Linear Regulator
output voltage. The basic architecture of linear regulator is presented in Fig. 4 [8]. The low dropout voltage regulator provides a regulative voltage between input and output is about 100mv to 400mV. The linear regulator includes an error amplifier to reflect the output and input difference, a power MOSFET to supply the load current, and the resistive feedback network to sensing the output voltage variation. Due to the control circuit of LDO is the simplest one, so the chip size is smaller than other regulators.Furthermore, LDO circuit have no inductors, it can not only reduces the PCB space but also saves the cost.
Besides, it is more suitable to operate at the light-load condition than to operate in the heavy load. The other benefits of linear regulator are low noise and no output ripple. It’s because that it just uses resistive feedback and error amplifier to build the feedback network but not switching signal based.In conclusion, the linear regulator can be used for analog and RF circuit application. The conversion ratio of the LDO is step-down only because of without storage element. The load ability becomes the direct ratio to the size of power MOSFET. Finally, the efficiency of LDO is proportional to output voltage, so the lower drop out voltage between input and output, the higher efficiency will be arrived.
1.3.2.
Switching capacitor Voltage regulator
The basic architecture of two-phase switching capacitor voltage doubler is shown in Fig. 5 [9]. The basic structure consists of capacitors and switches and it is also known as charge pump. The switching capacitor voltage doubler can generate a dc voltage higher or lower than the supply voltage or inverting voltage to the supply voltage. The operation principle is described briefly as follow: In the first interval of switching period, clock CK1 is high and
CK2 is low. The switch, SW1 and SW2, turning on and the switch, SW3 and SW4, turning off. The capacitor, C1 is being charged to the supply voltage VDD. In the second interval of switching period, clock CK1 is low and CK2 is high. The switch, SW1 and SW2, turning off and the switch, SW3 and SW4, turning on. The capacitor, C1 is being charged to twice of the supply voltage VDD.
In order to maintain the output voltage, there are many ways to modulate the output voltage of the switched capacitor circuit to the desired value. To regulate the output voltage by a control circuit and an error amplifier is the most straightforward method. The error amplifier senses the variations of output voltage, and the control circuit controls switches, SW1~SW4, from the signal of error amplifier to regulate output voltage to the stable value.
The efficiency of switching capacitor voltage regulator is poor at heavy load condition because the load ability depends on the output capacitor. As a result, the larger output capacitor can increase the load ability. However, when the output voltage is a multiple of input voltage, it will have the best efficiency above 90%.
1.3.3.
Switching Regulator
The switching regulator includes the boost converter, the buck converter, and the buck-boost converter. The buck-boost converter combines the step-up mode and step-down mode. The conversion ratio of buck-boost converter is depending on the switching duty cycle. They are widely used in power supply design Fig. 6 [10] shows the basic architecture of switching regulator which is a boost converter. The switching regulator consists of power MOSFET, diode and resistor to feedback the output voltage variance. The error amplifier is utilized to reflect the output error and generate the error signal. The comparator is utilized to compare the error signal and the ramp signal to generate duty cycle depends on the error between output voltage and reference voltage. Therefore, controller will control the timing of switches. Driver is utilized to drive the huge power MOSFET so that it can regulate output voltage to expectative level.
The operation principle can be described as follow: In the first interval of switching period, the switch is closed and the input delivers the energy to the inductor. In the second interval of switching period, the switch is opened and the energy of the inductor delivers from the Schottky diode to output. By through this operation cycle by cycle, the circuit can provide the step-up voltage to the output. Besides, the output voltage is dominated by the reference voltage (VREF) and the feedback resistances. The buck converter is achieved by changing the
positions of the inductor, switch, and Schottky diode.
Because of the switching operation, noise and EMI are critical issues for the output voltage in switching regulator design. The efficiency of switching regulator is good in heavy
load, but poor in light load. The detail description of the switching regulator will be introduced in chapter 2. Load VO VREF VRAMP Error Amplifier Comparator Buffer VIN
Fig. 6. The basic architecture of switching regulator.
1.3.4.
Comparison of voltage regulators
In this section, we list the advantages and disadvantages of the three kinds of voltage regulator, shown in TABLE I [11].
TABLE I
Comparison of voltage regulators
Linear regulator Switching capacitor
Voltage regulator Switching Regulator Regulation
Mode Buck Buck/Boost/Inverter
Buck/Boost/Buck-Boost/ Inverter
Cost Low Medium Highest
Complexity Low Medium Highest
Output ripple Lowest Medium Medium
Footprint area smallest Medium largest
Load ability Medium Low Highest
Efficiency Low Medium Highest
According to the table, we can realize that not only charge pump but also boost converter can boost the input voltage to higher than output voltage.However, in the application of high
brightness and large number LED driver, high power characteristics should be concerned. Based on the consideration of the higher efficiency, smaller power consumption, wilder output range for more LEDs in series and stronger loading capacity for more strings connect in parallel. Boost converter is more suitable than charge pump to be a power supply in LED backlight application.
1.4.
Motivation
Due to the advances in the technology of LED, the benefits for LED backlight has become evidently. Therefore, this thesis is focus on the entire LED driving circuit for high brightness LED or R, G, B LED backlight system.
For LED backlight in LCD TV application, LED driving circuit have two topics. Firstly, boost converter is to offer sufficient voltage to overcome the LED forward voltage. And offer a high load current ability, high efficiency for the LEDs in series and parallel. Secondly, current regulator is to regulate the current flow through each LED string and have PWM dimming circuit to adjust the illumination through averaging the driving current. This thesis proposes a new kind of LED driver to fit the application of LED backlight system.
1.5.
Thesis Organization
This thesis is organized as follows. The basic current mode DC-DC converter is introduced in Chapter 2. The design and implementation for proposed LED driver are described in chapter 3. Chapter 4 shows the system implementations and simulation results based on the proposed technique. Finally, the conclusions and future works are presented in Chapter 5.
Chapter 2
Basic concepts of Switching Regulator
2.1.
Basic Switching Regulator Topologies
The basic topology [10] and modulation technology of switching regulators will be introduced in this section. There are three basic switching regulators as shown in Fig. 7 to Fig. 9. They are the buck, boost, and buck-boost converter respectively. These converters consist of storage element, such as inductor and capacitor to store and deliver energy to regulate the output voltage. The power MOSFET is controlled by the control signal and the duty ratio is depends on the error between output voltage and reference voltage.
The fundamental operations of the three kinds of regulator are described as follow. In Fig.7, it shows the basic structure of a buck converter. The buck converter can generate output voltage smaller than its’ input voltage. Due to the property of conversion ratio it is also called a step down converter.
Fig. 7. The basic structure of buck converter
Fig. 8 shows the basic structure of a boost converter. The boost converter can generate output voltage larger than its’ input voltage. Due to the property of conversion ratio it is also
called a step up converter.
Load
V
OV
INL
C
D
Power
MOS
Control
Signal
Fig. 8. The basic structure of boost converter.
Fig. 9 shows the basic structure of a buck-boost converter. The buck-boost converter has both the characteristic of buck and boost converter. Thus, it is also called a step up-down converter.
Fig. 9. The basic structure of buck-boost converter.
2.2.
Modulation Technologies
There are two mainly kinds of modulation technologies in switching regulator. Firstly, PWM (Pulse Width Modulation) modulates the switching signal by a fixed switching frequency. Secondly, PFM (Pulse Frequency Modulation) uses a hysteretsis window to generate a switching signal. Both of the technologies modulate the on and off time of switches
to control the energy transfer to output.
2.2.1.
Pulse Width Modulation (PWM)
In PWM control, the switching regulators are regulated by PWM signal with a constant switching frequency as shown in Fig. 10 [10]. The duty ratio is decided according to the control signal and ramp signal. When the ramp signal is smaller than the control signal, PWM signal is high and vice versa.Therefore, the duty ratio of PWM signal depends on the trend of the control voltage and regulates the output voltage to the expectative level. However, PWM modulation has poor light-load efficiencies because of higher switching losses.
Fig. 10. Pulse-width modulation Signal.
2.2.2.
Pulse Frequency Modulation (PFM)
In PFM control, it is uses a hystersis window to generate the switching signal as shown in Fig. 11 [12]. In other words, it controls the switch of switching regulator by an alternative frequency. In Fig. 11 the PFM signal will be generated when the output voltage is smaller than lower threshold voltage of the hystersis window. The PFM signals are strings of pulse with fixed frequency to regulate the output voltage. The PFM pulse will stop when the output voltage reaches to the upper threshold of hystersis window. By using this modulation technology, there is more efficient at light loads because the switching frequency and associated switching losses are scaled down with load current.
Fig. 11. Pulse-frequency modulation Signal.
2.3.
Analysis of current mode Boost Switching
regulator
In current mode control technique the output voltage of converter is not only controlled by the voltage feedback loop but also the peak transistor switch current. The duty cycle of power transistor is controlled by voltage loop, inductor current of converter, capacitor voltages and power input voltage.
2.3.1.
The Operation Theorem of Current Mode Control
The block diagram of current mode boost converter is shown in Fig. 12. There are two operation modes for switching converter, which are voltage mode and current mode.
In voltage mode controlling, the converter only uses a voltage feedback loop to regulate the output voltage. The duty ratio of pulse-width modulation is produced by output signal of error amplifier and the original ramp signal.
In current mode controlling, it includes both voltage and current loop. The advantages of current mode are simpler dynamics and wide-bandwidth. The inductor and capacitor of power stage offer only one low frequency pole. Otherwise, current mode control should use the current sensing information during the normal operation to obtain simpler dynamics.
In Fig. 12 the PWM signal is generated by clock generator with a pulse of small duty ratio. The output of the SR latch should be set to high when the output signal of clock generator is high. In this state, the power MOSFET is turned on and diode off. The inductor current increases with a positive slope which depends on the input voltage and the value of inductor. The artificial ramp is added to the current sensing signal to avoid unstable problem when duty ratio is larger than 0.5. The error signal, the sum of ramp and current sensing are compared by the analog comparator. When the sum of ramp and current sensing is larger than error signal, the output of comparator is high to reset the SR latch. Besides, it can turn off the power MOSFET. Therefore, the duty cycle of power MOSFET is controlled by feedback voltage and inductor current.
Compensator
S
R
Q
Current Sensing Ramp Generator Clock Generator V REF VIN VO L D C RL RFB1 RFB2 VFB Boost ConverterCurrent -programmed Controller Conventional Output Voltage Controller
Fig. 12. Diagram of current mode boost converter.
2.3.2.
Oscillation for D>0.5
The current mode controller is unstable when the steady-state duty cycle is larger than 0.5. The reasons of oscillation caused by D>0.5 is described as follow.
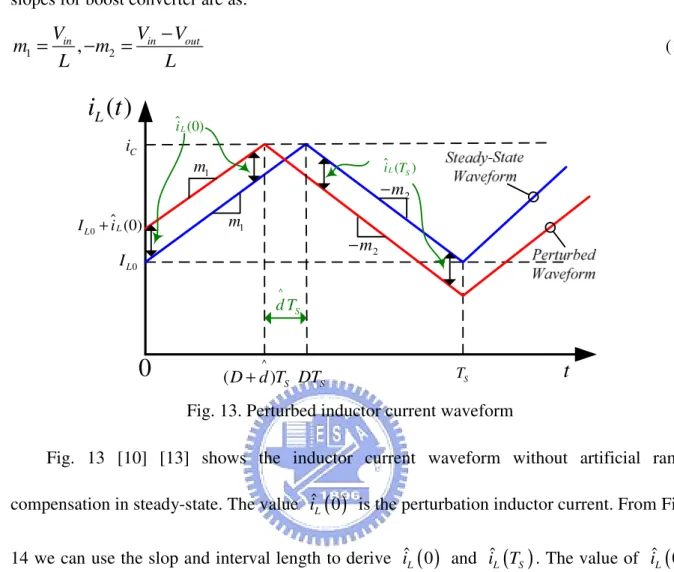
In current mode controlling, the inductor current changes with the rising and falling slopes for boost converter are as:
1
,
2 in in outV
V
V
m
m
L
L
−
=
−
=
(1) (0) L i$ ( ) L S i T $ ^ S d T ^ (D+d T) S DTS TS( )
Li t
t
1 m 1 m 2 m − 2 m − 0 L(0) L I + $i 0 L I0
C iFig. 13. Perturbed inductor current waveform
Fig. 13 [10] [13] shows the inductor current waveform without artificial ramp compensation in steady-state. The value iˆ 0L
( )
is the perturbation inductor current. From Fig.14 we can use the slop and interval length to derive iˆ 0L
( )
and i TˆL( )
S . The value of iˆ 0L( )
and i TˆL
( )
S is shown in equation (2) and (3) respectively.( )
1ˆ
ˆ 0 = −
L Si
m dT
(2)( )
2ˆ
ˆ
L S Si T
=
m dT
(3) In order to realize the relationship between slope and duty ratio, we consider the steady state inductor current without perturbing in first and second intervals. In first interval the inductor current is shown as equation (4).(
)
( )
0
1L S C L S
When it operates in the second interval, inductor current is shown in equation (5).
( )
(
)
2'
[
( )
0
1]
2'
L S L S S L S S
i T
=
i
dT
−
m d T
=
i
+
m dT
−
m d T
(5) Because of iL( )
0 =i TL( )
S , d =D , m1 =M1 , and m2 =M2 in steady state, the relationship between slope and duty ratio can be derived as equation (6).' 2 1 2 1
0
,
'
S SM
D
M DT
M D T
M
D
=
−
=
(6)By combining equation (2), (3) and (6) the change in inductor current perturbation over one switching period can be obtained in equation (7).
( )
( )
'ˆ
ˆ 0
L S LD
i T
i
D
=
−
(7)By the same analysis the changes in inductor current perturbation over two switching period can be derived.
(
)
( )
( )
2 ' 'ˆ
2
ˆ
ˆ
0
L S L S LD
D
i
T
i T
i
D
D
=
−
=
−
(8)Therefore, the perturbation becomes as equation (9) after n switching period.
(
)
(
)
'( )
'ˆ
ˆ
(
1)
ˆ
0
n L S L S LD
D
i
nT
i
n
T
i
D
D
=
−
−
=
−
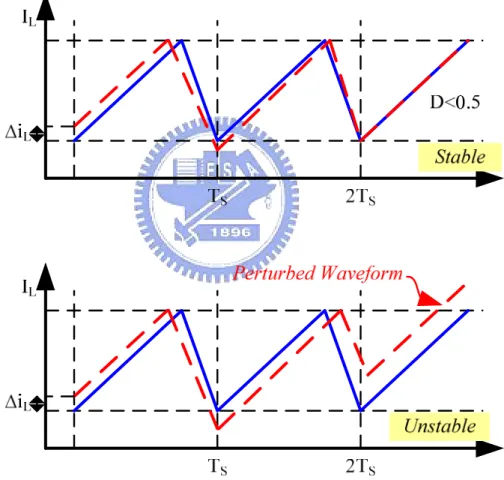
(9)In equation (9), the inductor current magnitude is tending down over several switching period when the duty cycle is smaller than 0.5. The inductor current is stable in this condition. Reversely, instability occurs when duty cycle is larger than 0.5. In briefly, in order to let the perturbation iˆL
(
nTS)
tends to zero, the value of –D/D’ should has magnitude less than one orD<0.5. Reversely, the perturbation iˆL
(
nTS)
becomes large as the magnitude of the value –D/D’ has larger than one or D>0.5. Therefore, we can derive the equation as (10) and (11).(
)
'ˆ
0,
1
L SD
i
nT
when
D
→
−
<
(10)(
)
'ˆ
,
1
L SD
i
nT
when
D
→ ∞
−
>
(11)The inductor current waveform in stable and unstable situation without compensation ramp is shown in Fig. 14. Therefore, current mode controller adds an artificial ramp and inductor current to avoid the unstable problem.
Fig. 14. Inductor waveform in stable and unstable situation without compensation ramp.
2.3.3.
Ramp Compensation
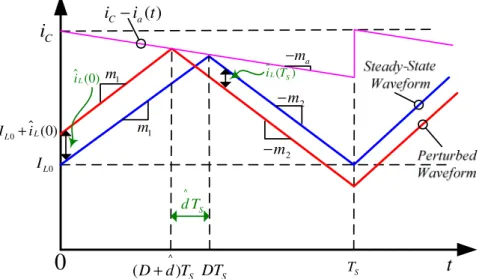
The sub-harmonic oscillation is a well-known problem of current-mode converter. It is independent on the converter topology. In Fig. 15 [10] [14], the artificial ramp generator is
added to the switching current sensing loop to avoid unstable oscillation. The compensated ramp can reduce the gain of the inner current sensing loop to prevent the oscillation problem of the current mode converter.
(0) L i$ i T$L( S) ^ S d T ^ (D+d T) S DTS TS C
i
t
1 m 1 m 2 m − 2 m − 0 L(0) L I + $i 0 L I0
( ) C a i −i t a m −Fig. 15. Perturbed inductor current waveform with ramp compensation
From Fig. 15, the perturbations iˆ 0L
( )
and i TˆL( )
S can be derived as equation (12) and (13).( )
1ˆ
ˆ
ˆ 0
L S a Si
= −
m dT
−
m dT
(12)( )
2ˆ
ˆ
ˆ
L S S a Si T
= −
m dT
+
m dT
(13) By combining equation (12) and (13) the change in inductor current perturbation over one switching period with ramp compensation can be obtained in equation (14).( )
( )
2 1ˆ
ˆ 0
a L S L am
m
i T
i
m
m
−
=
−
+
(14)From equation (14), the change in inductor current perturbation over several switching periods as:
(
)
2( )
2( )
1 1ˆ
((
1)
)
ˆ
0
ˆ
0
n n a a L S S L L a am
m
m
m
i
nT
n
T
i
i
m
m
m
m
α
−
−
=
−
−
=
−
=
+
+
(15)In equation (15), when the value n trends to infinite the perturbation i TˆL
( )
S becomes to zero just as the characteristic valueα
has magnitude less than one. Reversely, the perturbation i TˆL( )
S becomes infinite when the characteristic valueα
has magnitude greater than one. Therefore, we can derive the equation as (16).(
)
2 10
1
ˆ
,
1
a L S awhen
m
m
i
nT
when
m
m
α
α
α
<
−
= −
→
∞
>
+
(16)Thus, the common choice of the slope
m
a of compensation ramp is as shown in equation (17). Furthermore, the slope of compensation ramp should be larger than the slope of second subinterval period, as shown in equation (18). By the condition of equation (18) can make i TˆL( )
S trends to zero for any iˆ 0L( )
. It also lets current-mode controlled DC-DC boost converter stable for all possible duty cycle.2
1
2
am
=
m
(17) 21
2
am
≥
m
(18)2.3.4.
Continuous Conduction Mode (CCM)
In the CCM operation the inductor current has a minimum level above zero and operates continuously. Therefore, there are only two subintervals for switching converter in CCM operation [10]. The two equivalent circuits of first and second subintervals are as shown in Fig. 16.
Fig. 16 (a) shows the first subinterval operation in CCM. When converter operating in first subinterval the low side NMOS turns on and inductor current increasing. During this subinterval the inductor voltage and capacitor current can be derived as equation (19) and (20).
L
( )
L indi
v t
L
V
dt
=
=
(19)( )
C out Cdv
V
i
t
C
dt
R
−
=
=
(20) Fig. 16 (b) shows the second subinterval operation in CCM. When converter operates in first subinterval the high side PMOS turns on and inductor current delivering to output. During this subinterval the inductor voltage and capacitor current can be derived as equation (21) and (22).( )
L L in outdi
v t
L
V
V
dt
=
=
−
(21)( )
C out C Ldv
V
i t
C
i
dt
R
=
=
−
(22) ( ) L V t + − i tC( ) (a) VIN VO L C RL ( ) L V t + − i tC( ) (b)Fig. 16. (a) Equivalent circuits of the first subinterval in CCM. (b) Equivalent circuits of the second subinterval in CCM
By inductor voltage second balance, equation (23) can be derived. The output voltage increases when D rises. In the ideal case, the conversion ratio tends to infinity when D trends to 1.
(
) (
1
)
0 ,
1
1
'
1
out in s in out s inV
V
DT
V
V
D T
V
D
D
⋅
+
−
⋅
−
=
=
=
−
(23)By capacitor charge balance, the steady-state current in the switching converter can be calculated as shown in equation (24).
(
1
)
0 ,
2'
'
out out out in
S L S L
V
V
V
V
DT
i
D T
i
R
R
D R
D R
−
⋅
+
−
−
⋅
=
=
=
(24)The inductor current in equation (24) is equal to the input current of converter. Its’ magnitude is greater than the load current. By combining the equation (19) and (20) the inductor current ripple and output voltage ripple can be calculated as equation (25) and (26) respectively:
2
in L SV
i
DT
L
∆ =
⋅
(25)2
SV
v
DT
RC
∆ =
⋅
(26)2.3.5.
Discontinuous Conduction Mode (DCM)
In the DCM operation, the inductor current has a minimum level equal to zero. Therefore, the operation region will be defined as three subintervals for switching converter in DCM operation [10]. However, the first and second subinterval are as the same as CCM operation. Thus, the equivalent circuit in Fig. 17 has just shows the third subinterval. In the third subinterval the power MOSFET and diode are both turn off, the energy store in output capacitor to discharge to load. Owing to the three subintervals in the DCM operation, one switching cycle has divided into three parts,D T1 S, D T2 S and D T3 S. The operation waveform of boost converter is shown in Fig. 18.
( ) L V t
+ − i tC( )
( )
Li t
t
1 S D T D T2 S D T3 SFig. 18. Operation waveform of boost converter in DCM.
In the DCM operation, the inductor voltage, capacitor current of first and second subintervals are the same as equation (19) (20) (21) (22). The relative equations of the third subinterval are shown in equation (27) and (28).
0
Lv
=
(27),
0
out C LV
i
i
R
= −
=
(28) By inductor voltage second balance, equation (29) can be derived. The conversion ratio is relative to the duty ratio of the first and second subintervals.(
)
1 2 1 2 3 20
0 ,
out in s in out s S inV
D
D
V
D T
V
V
D T
D T
V
D
+
⋅
+
−
⋅
+
⋅
=
=
(29)By capacitor charge balance, the steady-state current in the switching converter can be calculated as shown in equation (30).
1 2 1 2
1
1
2
2
in in S out S S SV
V D D T
V
I
D T
D T
R
T
L
L
=
=
⋅
⋅
=
(30)By replacing equation (29) into (30) the output voltage can be obtained as:
2
4
1
1
2
,
2
out in SD
V
K
L
where K
V
RT
+
+
⋅
=
=
(31)voltage and duty cycle. However, in DCM operation the voltage conversion ratio depends on the inductor, load resistance, switching frequency and input voltage.
2.3.6.
Current Mode Controller Model
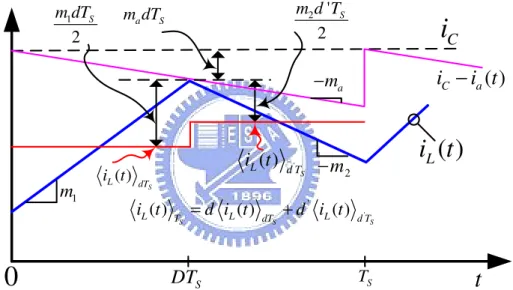
In order to have accurate model of current mode controller for DC-DC converter, the analysis is combined with the controller small signal model [15] [16] [17] [18]. For CCM operation, the relationship between control signal and inductor current are illustrated in Fig. 19, where m1 and m2 are the slope of inductor current, ma is the slope of compensation ramp.
S
DT
TSt
1 m 2m
−
0
a m − '( )
S L d Ti t
( ) S L dT i t ' ' ( ) ( ) ( ) S S S L T L dT L d T i t =d i t +d i t( )
Li t
( )
C ai
−
i t
Ci
1 2 S m dT m dTa S 2 ' 2 S m d TFig. 19. The relationship between the average inductor current and control voltage
From Fig. 19 the average inductor current can be expressed as equation (32)
( )
( )
2 2 1 2( ')
2
2
L C S S S S a S T Td T
d
T
i
t
=
i
t
−
m dT
−
m
−
m
(32) Where the slope m1 and m2are shown in equation (33)^ ^ ^ ^ ^ 1
,
2 in out inV
V
V
m
m
L
L
−
=
=
(33)Therefore, solution for
( )
^( )
( )
( )
( )
( )
2 ^1
2
1
'
2
2
C L S in S a sD T
D
d t
i
t
i
t
T
v
t
v t
M T
L
L
−
=
−
−
−
$
$
$
$
(34) Finally, to make( )
^d t as a function of $iC
( )
t ,i$L( )
t ,v$in( )
t and v t$( )
, equation (34) canbe rewritten as equation (35). Where the parametersFm,Fg,Fv are as the function in equation (36).
( )
( )
( )
( )
( )
^ C L in m g vd t
=
F
$
i
t
−
i
$
t
−
F v
$
t
−
F v t
$
(35) 2'
1
2
1
,
,
2
2
S m g S v a sD T
D
F
F
T F
M T
L
L
−
=
=
=
(36)By combining the controller block and power stage small signal model the model of current mode dc-dc boost converter can be obtained, as shown in Fig. 19.
m
F
vF
gF
Ci$
Li$
v$
^d
inv$
( )
Li
t
$
( )
^V d t
' :1
D
( )
^I d t
( )
outv
$
t
From Fig. 20 the transfer function of current mode dc-dc boost converter can be derived as follow. The control-to-output and line-to-output transfer functions are shown in equation (37) (41), respectively.
Control-to-output transfer function:
2 0 2 2
1
( ')
1
1
1
(
)
(
)
out c vc c C C CL
s
D
R
v
G
G
i
s
s
Q
ω
ω
−
=
=
+
+
$
$
(37) Where 0 22
'
1
( ')
'
out m c m out m v outV
F
G
F V
F F V
D
D
R
D
=
+
+
(38) 22
'
1
( ')
'
m out m v out CF V
F F V
D
D
R
D
LC
ω
=
+
+
(39) 22
1
'
'
'
1
'
m out m v out C m out m v outF V
F F V
C
D R
D
Q
RD
F V
F F V
L
RC
L
D
+
+
=
+
−
(40)Line-to-output transfer function:
0 2 2
1
1
1
1
out in gz vg c C C Cs
v
G
G
v
s
s
Q
ω
ω
ω
+
=
=
+
+
$
$
(41) Where 2 0 21
( ')
2
'
1
( ')
'
m out m g out c m out m v outF V
F F V
D
R
G
F V
F F V
D
D
R
D
−
+
=
+
+
(42) 22
'
1
( ')
'
m out m v out CF V
F F V
D
D
R
D
LC
ω
=
+
+
(43)2 3
1-( ')
( ')
m out m g out gz m g outF V
F F V
D
R
D
R
L
F F V
ω
+
=
(44) 22
1
( ')
'
'
1
'
m out m v out C m out m v outF V
F F V
D
R
D
C
Q
D R
F V
F F V
L
RC
L
D
+
+
=
+
−
(45)Based on the above analytic the current mode dc-dc boost converter can be constructed and designed.
2.4.
Compensator Design for DC-DC Converter
In general, the feedback loop of converter always comprises error amplifier. However, the error amplifier without compensating causes the stability problem to make this system unstable. In order to solve the stability problem, a compensator for current mode boost converter is needed. Therefore, a pole zero cancellation technique is used. The compensation network comprises one resistance and one capacitor to generate one pole and one zero [10] [19].
The compensation theorem is as follow. The relationship between feedback signal Vfb
and error amplifier output VC of transfer functionis shown as equation (46)
1 1 1 1 1 1
1
(1
)
[
//(
)]
,
(1
)
O Z Z m O Z m O O Z fb Z Z OV
s C
R
g
R
R
g
R
if R
R
V
sC
s C
R
+ ⋅
⋅
=
⋅
+
=
⋅
⋅
>>
+ ⋅
⋅
(46)Where gm is the transconductance and Ro is the output resistance of the error amplifier.
Therefore, the pole and zero contributed by the compensation network are as follow.
1 1 1
1
1
:
Z,
:
p Z Z Z Ozero s
pole s
C
R
C
R
=
=
⋅
⋅
(47)In this kind of compensation technique the pole which is smaller than the system pole and becomes the dominate pole to make sure the stability of the system.Furthermore, the unit gain frequency of the loop is determined by the compensation resistance. Thus, the frequency response of the system can be improved by choosing an optimal compensation resistance.
Chapter 3
LED Driver with Current Mode DC-DC
Converter
3.1.
The Proposed LED Driver with Current-Mode
Boost Converter
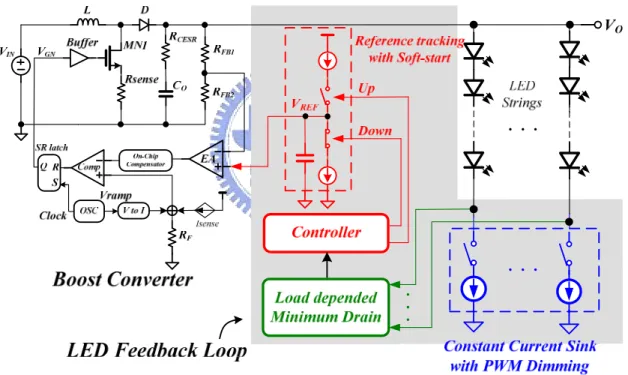
Fig. 22.The proposed LED driver with current-mode boost converter
Fig. 22 illustrates the proposed LED driving circuit with current-mode dc-dc boost converter which can drive up to 11x6 white LEDs. This white LED array has 6 chains which consists of 11 series LEDs. Besides, it has six precision current sink channels, up to 30mA per channel. The driving circuit includes four parts as shown in Fig. 22. There are current-mode boost converter, reference tracking circuit, PWM dimming with constant current sink and load
dependent minimum drain circuit.
The power stage includes an internal power NMOS to charge a 10µH inductor L and the inductor current is discharged by an external Schottky diode to a 4.7µH filtering capacitor, C. The internal resistor Rsense is utilized to sense the inductor current by current sensing
technique. The feedback resistances RFB1 and RFB2 are utilized to scale down the output
voltage to compare with the reference voltage VREF before feeding into the comparator. Then
the comparator compares the output signal of error amplifier and sums up ramp signal and current sensing signal.The output signal of comparator is utilized to decide the duty cycle of the PWM signal.
3.1.1.
The Design Theorem
(a) (b)
Fig. 23. (a) Case I: Two LED strings having the same forward voltage. (b) Case II: Two LED strings having different forward voltage.
The most important issue in design of a LED driving circuit is forward voltage variation, which will be unreliable when temperature and time vary. Although we can choose similar
LED of forward voltage manually, the cost is too expensive. Moreover, in order to get sufficient luminance, the backlight requires many LEDs to be connected in series and needs a constant current supply to maintain stable light illumination [20] [21] [22]. Therefore, to supply a sufficient voltage lager than the forward voltage of LEDs is needed and important. Fig. 23 shows two different cases of forward voltage. In Fig. 23 (a), if the forward voltages of two LED strings are the same and sufficient high, the output voltage level of boost converter is enough equals to Vout. Consider the forward voltage of one of the strings increases ∆V
when the other stays in constant. If the output voltage of boost converter still maintain at Vout and the head room of constant current sink might be compressed. Therefore, the output voltage of boost converter should be rose up equal to the variation on the forward voltage of LEDs. In other words, if forward voltage of LED increases the amount of ∆V, the output of boost converter should also raise the amount of ∆V. Therefore, the constant current sink circuit has the head room equal to Vout –Vf as the forward voltage of LEDs changing before.
By the analysis above, a LED driver should have a feedback loop according to the head room of constant current sink circuit to regulate the output voltage to a sufficient level.
Although the higher head room can contribute a more accurate current for LEDs, it will cause dispensable power dissipation. Therefore, the head room of the constant current sink circuit should be keep at the minimum value to prevent unnecessary power loss on it.
The detail description will be introduced in following sections.
3.1.2.
Operation Principle of Soft-Start and Reference
Tracking
The operation principle of soft-start and reference tracking circuit can be divided into two parts as shown in Fig. 24.At the first stage, the reference voltage level can rise gradually [23] by only executes the charging action. At the second stage, the adjusting of reference
voltage only depends on the channel voltage drop.If the head room of constant current sink circuit is too small the reference tracking circuit will execute up tracking and via versa.
Fig. 24.The proposed LED driver with current-mode boost converter
3.1.3.
PWM Dimming Consideration
Consider the PWM dimming and constant current sink circuit in Fig. 25 [4]. Owing to the current matching is the most important issue for LED strings as a backlight system. The constant current sink circuit to ensure the current matching is needed. Otherwise, High-quality, full-color video requires hundreds or thousands of gray levels from 0% to 100%. Therefore, the adjustment of gray level can always achieved by the dimming method. As mentioned before, the dimming method can be divided into two types, analog and digital dimming. The LED current and brightness which adjusted by changing the forward voltage of LED is called analog dimming. On the other hands, PWM dimming is achieved by applying full current to the LED and adjusted by modulating duty cycle. In analog dimming, if an LED is at full brightness with 30 mA of forward current, then 50% of the brightness is achieved by applying 50% of the maximum current to the LED. In digital dimming, the 50% brightness is controlled by adjusting the relative duty cycle for 50% of each period. Both of these two methods are illustrated in Fig. 25. Thus, the average current in PWM dimming can be written as equation (48). The parameter D represents the duty cycle of the PWM dimming signal.