大華科技大學
機電工程研究所
碩士論文
簡易聲射目標運動分析法於船艦
迴避魚雷攻擊之研究
Study of Alert of Torpedo Attack for
Surface Ship by Facile Acoustic
Target Moving Analysis
研 究 生:林 順 康
指導教授:曹 中 丞 博 士
簡易聲射目標運動分析法於船艦迴避魚雷攻擊之研究
Study of
Alert of Torpedo Attack for Surface Ship
by Facile Acoustic Target Moving Analysis
研 究 生:林 順 康 Student:Shun-Kang Lin
指導教授:曹 中 丞 博士 Advisor:Dr. Chung-Chen Tsao
大華科技大學
機電工程研究所
碩士論文
A Thesis
Submitted to Department of Mechatronic Engineering, College of Engineering and Design,
Ta Hwa University of Science and Technology in partial Fulfillment of the Requirements
for the Degree of Master in
Mechtronic Engineering
誌 謝
本篇論文能夠順利完成,誠摯感謝指導教授曹中丞博士在論文討 論內容期間提供很多的專業教導及邏輯分析,悉心指導啟發與奠基我 許多論文上需要之一些基礎觀念,並依據論文內容結果執行模擬分 析,且在論文撰寫過程中,導引我了解研讀基礎知識與撰寫論文的要 領與方向。也感謝口試委員郭桂林博士、韋孟育博士等對論文之水下 聲學、比例導引控制及目標運動分析之論文內容缺失與問題提供具體 的意見,使本論文更加完整。 進入大華科大攻讀學位期間,遇到之系上研究所老師之學術方面 都非常專業,尤其指導教授做學問嚴謹態度受益很多,系上老師在研 究所之專業課程學習也幫了論文很大的忙。其中在論文撰寫使用到黃敏昌老師所教授之Least Squares Regression及嵌入系統課程是本篇論
文利用之方法與觀念,還有與研究所同學的互動與討論,都是大華科 大之重要經驗,感謝機電工程系研究所之各位老師的用心教導。 感謝我的家人在這段時間對我的支持,讓我有機會攻讀完成研究 所學程,最後更加謝謝我的同事梁多浩博士,經常不辭辛苦之叮嚀與 加油打氣,希望能將這份畢業成果喜悅予我親愛的家人、同學、同事 及所有支持我、關心我、鼓勵我的人分享,在此萬分感恩大家。
簡易聲射目標運動分析法於船艦迴避魚雷攻擊之研究
學生:林順康 指導教授:曹中丞 博士 大華科技大學 機電工程研究所 摘要 本研究旨在探討海洋環境中水下快速運動魚雷攻擊我水面艦之 威脅問題,以簡易聲射目標運動分析法提供解決可行方案。雖然目前 科技可藉由水面艦現有之聲納系統偵測水下快速運動目標以獲取相 關資料,然而海洋水下環境由於受到大自然之溫度、深度、地形及鹽 度等多種介質影響,其偵獲水下快速運動目標仍有先天之障礙與困 難,使用水面艦現有之聲納系統偵測水下快速運動目標,監測追蹤目 標運動所產生之軌跡,必須將聲納偵測到的目標資料予以判讀與解 析,配合目標運動分析,快速解算估測目標方位,產生視覺化目標運 動軌跡,以獲得水面艦執行機動迴避航程,進而適時佈放誘標,使魚 雷往誘標方向攻擊,以達到保護水面艦或船團免遭攻擊,並可提昇水面艦反制魚雷能力。 本論文以簡易聲射目標運動分析法應用在水面艦聲納系統偵測 魚雷訊息不完整情況下,可解決對魚雷追蹤和定位之難題。並於快速 解算估測魚雷方位時,繪出視覺化目標運動航跡,幫助指揮者快速反 應產出應付魚雷威脅方案。在未來研究方向,將針對提昇魚雷及潛艦 之水下聲頻信號處理與檢測能力,準確識別水下運動目標特徵訊號, 進而即時掌握蹤跡。 關鍵字:魚雷、水面艦、聲納、目標運動分析、誘標、視覺化
Study of
Alert of Torpedo Attack for Surface Ship by
Facile Acoustic Target Moving Analysis
Student:Shun-Kang Lin Advisor:Dr. Chung-Chen Tsao
Institute of Mechatronic Engineering Ta Hwa University of Science and Technology
Abstract
The purpose of this research is to propose a feasible alternative by conducting facile acoustic target motion analysis when surface ship was threatened and attacked by fast moving torpedo (Target) under sea. However, surface ship equipped with the sonar(Sound Navigation and Ranging, SONAR)system may be able to detect the Target under water and obtain relevant information, which would still in nature face some great difficulties and obstacles due to various transmission media, such as the temperature, depth, terrain, salinity under the natural environment of sea. Surface ship with passive sonar system to detect the Target under sea were to monitor and follow the traces left by the Target. The collected information regarding the Target need be read and analyzed as necessity. Furthermore, the system which combined with the target motion analysis is able to quickly estimate the location of the Target and visualize the Target’s moving traces. The system with the target motion analysis could
directs surface ship how to maneuvering evasion and then set up decoys duly and efficiently, making the Target under sea attack toward the direction of decoys and deviate from surface ship, and to protect surface ship or fleet from attacks as well as to enhance the countermeasure of surface ship.
While applying facile acoustic target motion analysis to the sonar system equipped with the surface ship may still lack for the complete information of torpedo detection, this research is able to successfully solve the problems of tracing and locating torpedo under such a circumstance. When the direction of the torpedo is quickly calculated and estimated, the visual traces of Target motion have also been drawn simultaneously, helping a commander promptly come out with a plan responding to the threat of the torpedo. For the future research, it will focus on enhancement of the abilities to process and detect acoustic signals of the submarines and torpedo underwater, precisely recognizing the characters and signals of underwater Target and then further promptly knowing well about the traces.
Keywords: Torpedo, Surface Ship, Sonar, Target Motion Analysis, Decoy, Visualize
目錄 誌謝...I 中文摘要...II 英文摘要...IV 目錄...VI 表目錄...IX 圖目錄...X 第一章 緒論...1 1.1 前言...1 1.2 研究目的...2 1.3 問題描述...3 1.4 文獻探討...4 1.5 研究內容及方法...6 第二章 水下聲學介紹...8 2.1 聲納原理之應用...8 2.2 聲納方程式...10 2.3 魚雷輻射噪音...14 2.4 影響聲速之因素...15 2.5 聲波之音傳路徑...16
2.6 音傳路徑分佈...18 第三章 比例導引...20 3.1 概要...20 比例導引的介紹...21 3.3 直航高速運動目標...22 3.4 二維比例導引...24 3.5 魚雷危險區之定義...25 3.6 潛艦之潛航接近區定義...26 3.7 水面艦與魚雷之航向及航速...27 第四章 目標運動分析...29 4.1 目標運動分析介紹...29 4.2 魚雷運動目標特徵背景...30 4.3 魚雷運動目標方位變化...31 4.4 被動式目標運動分析...31 4.5 目標數據處理…………...33 4.6 將數據使用 階多項式...35 4.7 目標運動分析視覺化方法...36 4.8 場景運動分析結果...42 第五章 目標運動模擬...46
5.1 場景模擬目的...…………...46 5.2 水面艦與魚雷目標搜索階段...47 5.3 目標定位解算階段...49 5.4 本艦確認防禦階段...53 5.5 決策輔助階段...53 5.6 水面艦使用音響誘標時機...54 5.7 水面艦機動迴避時機...55 第六章 結論...57 6.1 結果分析與討論...57 6.2 未來研究方向...57 參考文獻...59 符號說明...61
表目錄 表 2.1 被動聲納頻率範圍之吸收係數與音傳損失關係表...12 表 4.1 φ與 t s V V 比值關係表...43 表 4.2 φ與 R D 比值關係表...44 表 4.3 φ與 θ 值關係表...45
圖目錄 圖 1.1 海洋中之水下作戰場景...2 圖 2.1 噪音頻譜...13 圖 2.2 溫聲彈與聲速剖面圖...16 圖 2.3 聲速剖面與相關音傳路徑示意圖...17 圖 2.4 典型海水水溫垂直分佈示意圖...19 圖 3.1 直航魚雷瞄準水面艦幾何關係圖...23 圖 3.2 魚雷以比例導引追擊水面艦...25 圖 3.3 魚雷危險區域之範圍...26 圖 3.4 潛航接近區與魚雷危險區之範圍...27 圖 3.5 水面艦與魚雷之航向及航速關係圖...28 圖 4.1 時間方位關係曲線圖...32 圖 4.2 點樣式圖形...33 圖 4.3 場景之魚雷危險區示意圖...37 圖 4.4 位置幾何圖...38 圖 4.5 時方圖...39 圖 4.6 φ與 t s V V 比值之關係圖...43 圖 4.7 φ與 R D 比值之關係圖...44
圖 4.8 φ與 θ 值之關係圖...45
圖 5.1 位置幾何圖...47
圖 5.2 潛艦射控解算到達 ECP 示意圖...48
圖 5.3 模擬場景之時方圖...53
第一章 緒論
1.1 前言 台灣四周環海一直是我國重要的屏障,不論在政治、經濟、國防、 外交、民生、觀光及漁業等構面觀之,台灣都和海洋有密不可分的關 係,如在國防上為維護台灣海疆的安全,首將面臨中共水下武器攻擊 的威脅,尤以潛艇發射魚雷(Torpedo)為甚,如圖 1.1 所示[1]。其速度 均在 20 節(1 節=1 海浬/小時)以上,比水面艦速度還快,故水面艦須 具備防禦來自於水下攻擊的技術與能力。然海洋環境複雜,使得水面 艦面對魚雷的威脅都較處於劣勢,在此態勢下,利用現有裝備操練發 展自己的海洋科學與技術能力,以提昇自我海疆防禦技術,使水面艦 在遭受到魚雷的攻擊威脅時,能有充分的時間實施有效防禦作為。通 常水面艦為防禦敵軍魚雷攻擊時,首要之務係魚雷預警(Alert of Torpedo)。當魚雷在水下航行時,會產生聲頻訊號,此聲頻訊號會在 水下環境傳播,且與其他水下載具運動頻譜(Spectrum)特徵明顯不同。水面艦可利用聲納(Sound Navigation and Ranging, SONAR)偵測
此特徵訊號,以對不同類型之水下載具進行分類。同時配合聲學理論
(Acoustics Theory)、比例導引(Proportional Navigation, PN)、目標運動 分析(Target Moving Analysis, TMA)等原理或方法,以提昇其自我防禦
技術,不一定須仰賴昂貴的高科技武器,才有迴避水下魚雷攻擊的機 會。 圖 1.1 海洋中之水下作戰場景[1] 1.2 研究目的 在海洋環境中,聲音傳遞會受到溫度、深度、地形及鹽度等多種 介質的影響,而產生不規則的聲音傳播。換句話說,聲音之音傳路徑 具不規則性,故水面艦聲納偵測水下魚雷效果不如預期。因此本文針 對水下魚雷攻擊水面艦之威脅問題,提出以簡易聲射(Acoustic)目標 運動分析法之解決可行方案。其係藉由水面艦現有之聲納系統偵測水 下運動載具相關資料,予以判讀與解析是否為魚雷訊號,且因魚雷是
析,由偵測到目標之聲射方位參數,使用最小平方迴歸法(Least
Squares Regression Method, LSRM) 解 算 出 目 標 方 位 變 率 (Bearing Rate),快速解算後繪出視覺化(Visualize)目標運動軌跡,從而實現利 用聲射來對水下魚雷目標偵測方位、距離、深度、和速度,完成識別 進行魚雷目標定位,建立一套提供水面艦在海洋環境遠距及近距反制 魚雷威脅的適切解決方案。 1.3 問題描述 魚雷是潛艇發射之水下攻擊武器,在反潛作戰中,水面艦偵測潛 艇效果深受水文之影響,潛艇先天上有安靜、隱密與奇襲之特性,使 得潛艇是水面艦很難對付的水下載具,如果水面艦要面對潛艇發射魚 雷之攻擊,魚雷與潛艇在外觀體積上差異很大,更不利於水面艦聲納 之偵測。此外,使用船艦之主動聲納(Active Sonar)偵測魚雷,因有海 水介質之吸收問題,以及小目標散射強度小等關係,其偵測距離變得 很短,無法滿足水面艦之魚雷防禦,更是不利於水面艦聲納作業,故 需要依靠特殊作法以反制魚雷。目前水面艦為求偵測遠距離之魚雷目 標,均採用被動聲納(Passive Sonar)。而被動聲納僅能提供魚雷來源 方位偵測,對於魚雷聲射偵搜,然而僅有目標方位,多數研究結果為 很難求解,故目標方位之變化率,係成為估測來襲魚雷之重要參數。
本文研究透過以魚雷目標聲射特性,對其偵測、識別、預警、定 位和追蹤,依據水面艦上之聲納資料,對魚雷和其他水下載具之輻射 噪音頻譜特徵分類識別,並輔以魚雷比例導引概念之方法,在主動聲 納遠距離偵測受限之時,船艦透過目標運動分析來找出四週附近的水 下目標,利用被動聲納的大量資料,經由目標運動分析,解算過濾辨 識並可能發生的解,使魚雷目標航跡可成為視覺化,以最短時間解算 魚雷狀態,並有效地執行對抗魚雷攻擊之反制措施,以提昇水面艦聲 納對魚雷目標偵測、識別、預警、定位和追蹤性能。 1.4 文獻探討 本 文探究 的魚雷目 標是針 對聲射歸 向魚雷 (Acoustic Homing Torpedo),世界各國對付魚雷的方法大多是發展另外一套魚雷反制系 統,來處理水面艦之防禦行為,但其利用的裝備仍是聲射裝置,其原 理也是音頻訊號之處理,以及利用音頻訊號干擾作業,與來襲魚雷進 行聲射對抗[2]。對於魚雷目標偵獲大都已設定許多假設條件下去研 究,所有偵獲魚雷的資訊都在假設性的情況下,探討分析於水面艦之 防禦行為,甚至於作水面艦反制之加強分析,研究之方法使用了聲學 理論輔以其假設性資訊,讓其結果符合假設,而忽略了初始要水面艦 如何解決魚雷偵獲問題;如果魚雷很容易偵獲,或許就不會有南韓天
安艦事件。 水下作戰不管用何種方法來增強水面艦防禦,雙方在遭遇時,皆 是在同一水下環境,也就是雙方均處在漆黑的室內互相戰鬥,魚雷是 攻擊的一方,水面艦是防守的一方,雙方幾乎只能仰賴被動聲納偵測 對方,即是一般人所稱之聽覺,雙方均是盲劍客都使用聽音辨位法, 即以聽對方聲音的方式去辨識出對方的位置,而且還要儘可能減少本 身的噪音,以減低被對方聽到的可能。被動聲納偵測魚雷方位,其噪 音會受到海洋水文環境之影響,偵測所得音頻訊號資料混有許多的噪 音甚或時有時無,故使用聲學原理解析為聲射偵測之基礎應用。 在整個魚雷運動過程中,除了輻射出含特徵頻譜的噪音外,魚雷 體積小、機動性強,其運動特徵與方式、方位之變化、速度快等與其 他水下目標之特性有明顯之差別[3]。但驅動魚雷航行的動能有限, 尤其是高速航行時更消耗能量,在發射魚雷攻擊水面艦時,須先以聲 納對水面艦進行射控解算後設定發射參數才能提高魚雷命中率。 另外,魚雷目標也會改變航向與航速以達到其攻擊水面艦手段, 其中的解算也將討論魚雷目標的導引控制,將魚雷基本導引控制作初 步之介紹,並以直航定向定速之魚雷為例,輔以廣為使用傳統的比例 導引(Proportional Navigation, PN)作為基礎,應用到魚雷目標改變航
雷目標變向變速,獲得收斂之結果,提供水面艦機動迴避(Maneuver) 方法參考運用[4]。 1.5 研究內容及方法 由於在水下僅能仰賴聲波傳播,光線與無線電波都很難傳播超過 百公尺以上,根本無法透過肉眼或雷達「看」到目標,需要靠「聽」 來找出目標蹤跡。聲納是一種聲射偵測器,其中被動聲納就是「聽」 水中的聲音,不管是水中之魚群、潛艇,乃至水面上的船艦,都是藉 由「聽」之搜索目標,然水中有大量的背景雜音,如何從一片雜訊中 「聽出」目標之所在,除了船艦上硬體設備、水下聽音器或聲納之外, 尚需熟練的聲納操作人員人工監聽。另外,亦需將水面、水下和空中 包含目標訊息之資料及周遭環境資料,經類比轉換成數位資料,處理 及融合後,對船艦或移動目標建立聲紋資料檔案,繪製成目標運動軌 跡圖像,凡有關所有移動目標之間進行的運動資訊,皆成為視覺化畫 面,如此方能在聽到聲音時,辨認或是看到聲音資訊判讀識別。 聲納是水下最重要的偵測工具或裝備,運作方式包括被動聲納與 主動聲納二種。主動聲納的運作是對目標發出聲波,並且接收反彈回 來的聲波,解算回波中的目標資訊(方位、距離),以判斷對方的確實 位置。主動聲納獲得的目標資訊快速且精確度當然高於被動聲納,但
是在水下宛如一切在「摸黑」的水下接戰中,主動發出之聲波,聲波 會為水下較大之物體所反射,並為發射機中之接收機所接收,得到反 射聲波資訊,然而立刻會曝露自己的位置。因此不到最後確認時機才 要出手攻擊,通常不會輕易使用主動聲納,製造聲波源來曝露自身的 位置,反而不利於己之作法,這是在水下接戰很重要關鍵因素。 由於使用被動聲納偵測、分類、識別、定位和追蹤的方法,得到 訊號資料作判讀,將資料配合其他分析方法使用,例如聲學理論、比 例導引及目標運動分析等原理或方法,以彌補被動聲納精確度之問 題,對威脅進行初步之分類,並能快速確定來襲魚雷的方位,其中要 解決的是聲納低信號雜訊比之條件下,去執行水下聲射歸向魚雷之噪 音訊號之獲取與判別,從聲納系統使用角度去分析,希望能在較遠距 離發現聲射歸向魚雷目標,然而,複雜之海洋環境之條件下,由遠處 傳遞回來的目標訊號相對於背景噪音或其他干擾聲頻訊號總是很微 弱,因此,必須充分利用訊號和魚雷噪音特徵訊號之差異,才能從中 區分出訊號出來。 本文研究水面艦反制魚雷,針對艦艇上現有聲納系統,以被動聲 納方式,建立魚雷偵測和識別能力,對抗聲射歸向魚雷攻擊,期以本 文研究內容及方法,提昇反制魚雷能力,發展魚雷預警系統能及時發 現魚雷與快速反應機動迴避,對付水下潛艇以魚雷攻擊之封鎖行為。
第二章 水下聲學介紹
2.1 聲納(Sound Navigation and Ranging, SONAR)原理之應用
在水下環境中以聲波傳播的距離最遠,故水下多使用聲納來作導 航與測距的工具。聲納是一種水下探測和通訊任務的電子設備,其利 用聲波在水下的傳播特性,透過電聲轉換成訊號處理。聲納系統按其 基本工作原理可分為二種類型:主動聲納(Active Sonar)與被動聲納 (Passive Sonar) [5]。主動聲納本身產生聲射訊號,藉由聲射訊號接觸 物體後反射回來的回波變化,作為計算物體之方位與距離的資料。被 動聲納之作用和收音裝置極為相近,不發出任何聲射訊號,只有接收 來自於周遭之各種聲射訊號,來判斷與辨識物體目標方位和信號頻率 之資料。被動聲納的音源有來自於魚雷的機械振動噪音、水動力噪音 和推進器螺槳空化、振動產生之水下輻射噪音,此噪音均屬於寬頻輻 射噪音;而魚雷聲納所發出之尋標乒音則屬窄頻脈波,且為主動聲納 音源。對被動聲納而言,是接收目標所發出之聲射訊號(寬頻及窄 頻),經過了信號處理與分析後,可以偵測出魚雷的存在與否,當接 收到的聲射訊號很複雜時,除了目標訊號之外,也會混雜有其他艦船 噪音、海洋生物散射、海底與水面反射之混響……等訊號。而此混合 的訊號,包含有多類音源,必須利用訊號處理技術,才能順利的從其
中將目標訊號解析出。此外,因聲音之音傳路徑在水中有不規則性, 亦會影響聲波之接收與發射之功能。 另一方面,大自然環境會造成聲音之音傳路徑有不規則性,而其 大自然環境限制將使聲納偵測之解析度降低,直接影響聲納偵測水下 目標訊號產生不完整性及不連續性,如試圖以檢測目標訊號來作為比 對目標,可能在處理訊號比對資料上需花一些時間,此時又不符合魚 雷已到須馬上處理之窘境,故恐有資訊不足或資訊處理時間不夠之問 題。再加上各國之魚雷目標資訊都需要有,而此資訊幾乎是很難取 得,故更不用想進一步提升對魚雷目標進行檢測、定位和識別機率。 本文所述利用水面艦艦艏聲納來作魚雷防禦,從來襲魚雷的偵獲 開始,以作為研究的起始。如以無條件探討,可將聲納視為百分百搜 索到目標,就會誤以為水下所有動態目標都可被聲納偵測的一清二 楚,有如像紙上談兵那樣簡單而且可掌握所有之情況,那麼魚雷目標 就很好防禦,潛艇行蹤都能追蹤到,這樣的情況就與實際不符,無法 幫助解決以水面艦艦艏聲納反制來襲魚雷的問題。於是本研究透過融 合以不同的層面向資訊之方法,解算資訊與解析度不足的問題,以研 判或識別是否為一可疑的攻擊魚雷線索,並進行辨識目標之方位與距 離。
2.2 聲納方程式 基本上,聲音在水中之傳播速度約為 1,500 m/sec,如果從聲納 發射聲波開始算起,到接收目標物距離所需往返時間為 Δt,則距離 計算為 2 t 1500×∆ (m)。於評估聲納性能之聲納方程式中,本文以使用 水面艦之艦艏被動聲納為主(艦艏聲納多為主動聲納,但可置於被動 傾聽模式下作為被動聲納運用),基本上討論有關聲學噪音之各項因 素很多,可歸納於聲納方程式中評估,為配合本研究被動聲納為主要 對象,故只有列出被動聲納方程式說明,其基本被動聲納方程式
(Passive SONAR Equation)可表示如下[6]:
SL – TL = NL - DI + DT TL = SL – (NL – DI) – DT ---(2.1) 其中 SL:目標噪音源強度(Source Level)(dB/1μPa/Hz) TL:聲音傳播損失(Transmission Loss)(dB) NL:海洋環境背景噪音強度(Noise Level)(dB) DI:被動接收方向性指數(Directivity Index)(dB) Dd:陣列直徑(m) λ:信號頻率波長(m) DT:偵測門檻基準值(Detection Threshold)(dB) 又 TL(dB) = 20logR +αR×10−3 ---(2.2) 2 d πD log 10 DI =
+ + + = 22 2 2 f 4100 f 40 f 1 f 1 . 0 0936 . 1 α ---(2.3) α:海水吸收係數(dB/Km) R:偵測距離(m) f:頻率(KHz)
至於基本主動聲納方程式(Active Sonar Equation)可表示如下[6]:
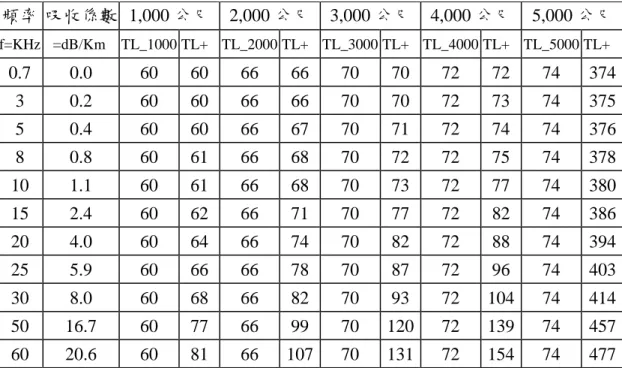
2TL = SL – (NL – DI) – DT+TS ---(2.4) 其中 TS:目標強度(Target Strength)(dB) 被動聲納頻率範圍之吸收係數與音傳損失關係,如表 2.1 所示。 因海水是一種不均勻的非理想音傳介質,其在海水中各種不均勻性的 吸收、擴散、及折射等原因,聲波在傳播時,聲音傳播方向上的聲音 強度將會逐漸減弱,也就是說聲波能量將被介質吸收而消失,傳播損 失(TL)定量地顯示了聲波傳播在一定距離後聲音強度的衰減變化,魚 雷噪音強度衰減變化使得遠距離探測魚雷更加困難,且傳播損失中的 吸收係數是與聲音的頻率相關。低頻時,α 值可忽略;高頻時,α 值 大。例如魚雷目標輻射音源頻率 30 KHz 之 α 值為 8 dB/Km,將導致 偵測距離的減少,倘忽略 α 值,則可在 2,500 公尺距離測得魚雷加上 吸收係數 α 後,則僅能在 1,000 公尺測得。
表 2.1 被動聲納頻率範圍之吸收係數與音傳損失關係表 頻率 吸收係數 1,000 公尺 2,000 公尺 3,000 公尺 4,000 公尺 5,000 公尺 f=KHz α=dB/Km TL_1000 TL+α TL_2000 TL+α TL_3000 TL+α TL_4000 TL+α TL_5000 TL+α 0.7 0.0 60 60 66 66 70 70 72 72 74 374 3 0.2 60 60 66 66 70 70 72 73 74 375 5 0.4 60 60 66 67 70 71 72 74 74 376 8 0.8 60 61 66 68 70 72 72 75 74 378 10 1.1 60 61 66 68 70 73 72 77 74 380 15 2.4 60 62 66 71 70 77 72 82 74 386 20 4.0 60 64 66 74 70 82 72 88 74 394 25 5.9 60 66 66 78 70 87 72 96 74 403 30 8.0 60 68 66 82 70 93 72 104 74 414 50 16.7 60 77 66 99 70 120 72 139 74 457 60 20.6 60 81 66 107 70 131 72 154 74 477 基本上,艦船、潛艦、魚雷等載具均使用被動聲納偵測輻射噪音 訊號來識別目標。而利用目標輻射頻譜,對目標進行分類識別是水下 聲射訊號處理領域一個重要的研究內容。通常產生噪音的來源很多, 包含航行之船舶機械噪音互相影響,還有船舶之間聲納系統常與其他 探測儀同時在海洋環境使用,這些儀器所導入的噪音,有時也會成為 聲納系統正常運作的問題。 水下噪音音源,有船舶行駛之人造噪音,或有因地震、下雨、刮 風、水面氣泡及浪花所引起之能量較低的噪音自然噪音,甚至海洋生 物之鳴叫所產生之噪音,還有如渦流所致壓力變動,海底地殼振動,
2.1 所示[6]。如當海象變差時,這些噪音之能量與頻率範圍會加大許 多,在噪音頻譜內,頻譜顯示頻率參考範圍及相關資訊,因為頻譜特
徵提取是目標分類的關鍵環節。
2.3 魚雷輻射噪音 水下隨著深度轉變,海水的密度與鹽份也會有所變化,這使得不 一樣深度的海水,傳播聲波時的折射率出現很大差異,因此於水面下 幾十公尺處就會有所謂混合同溫層(Mixed Layer),簡稱混溫層,在這 混溫層上下的海水,折射率出現很大的不同,一般會被混溫層反彈無 法穿透。所以水下載具或潛艦如果躲在混溫層下方,被動聲納或主動 聲納,都不一定能夠偵測得到,相對地,躲在混溫層下方的水下載具 或是潛艦,也會一樣聽不到海上之水面艦船的聲音。因此,對於水面 艦來説,要想找到一艘安靜躲藏在水下的潛艦或水下載具,其實有如 漆黑一片的室內去找黑貓一樣的困難。 通常魚雷之輻射噪音可分為二大類:暫態及穩態噪音。暫態噪音 包含魚雷從潛艦發射管艙門出管時產生之噪音,以及魚雷出管後速度 由低速到高速時,有明顯之特徵頻率變化,因此透過被動聲納偵測, 頻譜之頻率變化可以偵測到魚雷之初始發射狀態,此暫態噪音為短暫 之存在無法取得連續之資料。 穩態噪音為魚雷之航行輻射噪音,只要有航行其噪音必然存在, 其噪音包含螺槳噪音、空蝕化噪音、機械動力裝置形成的噪音等,具 有較強的連續性噪音,及明顯之頻率顯示在頻譜由低到高的變化上。 魚雷航行時的頻譜能量變化較為明顯,魚雷機動性強,在水下高速運
動的目標,與一般船艦比較,魚雷速度遠大於一般船艦,也突顯魚雷 之特殊目標運動特徵。 2.4 影響聲速之因素 一般而言,影響聲速的因素有溫度、鹽度、及壓力,其中聲速與 溫度關係約為 4 m/sec/℃;聲速與鹽度關係約為 1.2 m/sec/ppt;聲速 與深度關係約為 0.017 m/sec/m。以一般聲納而言,溫度是最重要的 因素。在海水的各種深度中,溫度的變化則很小,即使在海水之表面 與淺層處,會因日光照射而明顯之溫度變化,但僅止於表層海水的表 面溫度稍有增加,對於廣大之海平面升溫,則是有限的,故於有極劇 溫度變化的斜溫層(Thermocline),溫度下降對聲速才有明顯不同。聲 速 剖 面 圖 可 由 多 種 儀 器 量 測 , 最 常 被 使 用 的 為 可 棄 式 溫 深 彈 (Expendable Bathythermograph, XBT),如圖 2.2 所示[7,8]。在大多數 的情況,聲速相同的水層皆呈水平分佈。 有關聲速公式可表示如下[9]: C=1449.2+4.623 Tt-0.0546 Tt 2 +1.3191(S-35)+0.017d ---(2.5) C:聲速(m/sec),Tt:溫度( ), S:鹽度( 0 /00),d:深度(m)。
圖 2.2 溫深彈與聲速剖面圖[7,8] 2.5 聲波之音傳路徑 聲波在水下傳播時,受到溫度、鹽度、及壓力的因素,造成音傳 路徑是不規則的,其中原因是聲波由一介質進入另一介質時,聲速在 傳播時會有變化,其特性為向速度更慢的方向產生折射。在一定之深 度或距離內聲速改變越大,其折射程度也越大。聲速與深度及溫度關 係之音傳路徑有:(1)聲速直線傳播,聲速不隨深度改變,聲波在溫 度和深度曲線呈微負梯度時,恒速下直線傳播;(2)當溫度隨深度增 加而下降,造成負梯度時,聲波明顯偏向水底折射。超過聲波折射範 圍之區域,稱之為陰影區(Shadow Zone);(3)當溫度隨深度增加而下 降,造成正梯度時,聲波明顯偏向水面折射。同樣超過聲波折射範圍 之區域,稱之為陰影區;(4)當接近水面之溫度不變,較下之深度產
生負梯度時,音傳路徑形成分裂衍射模式,聲波部份偏向水面折射, 聲波部份偏向水底折射。兩部份夾擠超過聲波折射範圍之區域,稱之 為陰影區;(5)當上下深度同時產生負梯度和正梯度時,音傳路徑形 成分聲道,兩部份交界處為聲道之軸。潛艇可利用處在陰影區之環境 避免被聲納偵測。有關聲速剖面與相關音傳路徑示意圖,如圖 2.3 所 示[10]。 圖 2.3 聲速剖面與相關音傳路徑示意圖[10]
2.6 音傳路徑分佈 典型海水水溫垂直分佈大致可分為三區:(1)混合同溫層;(2)斜 溫層;(3)深海低溫層[11]。最上層為混合同溫層(Mixed Layer),在這 一層之海水表層範圍,大約在水下 100 公尺以內,因為海水受到太陽 日光照射及大氣溫度之影響,溫度之變異最大,譬如經過風速之擾動 捲起風浪及海水之水平及垂直流動因素影響,則會發生海水本身溫度 之混合作用,將使得這一層海水溫度均勻呈現同溫現象,如圖 2.4 所 示[12]。在這混合同溫層裡,溫度不太有很大差異,壓力只隨深度增 加而增加,影響之因素則為壓力,因此聲速向下則是逐漸增加,使得 聲波變成向上彎曲之音傳路徑,聲波會侷限在層次深度內上下反彈前 進,形成表面聲道之音傳路徑。由於聲波被限制在聲道內前進傳遞聲 波,聲波能量擴散損失會較小,使得聲波能量可以傳到較遠的距離, 也就聲納偵測之距離加長許多。 中間層稱之斜溫層(Thermocline),位於混合同溫層之下,在此層 之海水溫度變化將快速向下遞減,聲速之變化也將向下隨之遞減,將 形成聲波行進之路徑是為向下彎曲之形狀。當聲納系統發出聲波訊 號,將造成向下折射前進之路徑產生,除了小角度的聲波會在混合同 溫層內形成聲管之外,大角度的聲波則繼續向下彎曲直到碰觸海底反 彈或未觸及海底就彎向向上之方向,在層次深度上下分裂之聲束之
間。因為聲波未能到達此斜溫層,於是形成聲納偵搜之陰影區(Shadow Zone)。 深海低溫層(Deep Water)為三區之最下層,深度約為 1,500 公尺 以上之水深範圍,在這一層之海水溫度之變化很小,不過由於深度與 壓力關係,此層壓力對聲速影響很大,聲波之路徑是向下遞增使得聲 波產生向上彎曲的現象,聲波向下產生折射,通過深海低溫層最低音 速之深度後,立即開始往向上方向彎曲,到海水表層匯集上來,形成 一匯音區,成為聲波之一週期波之傳遞,有時此匯音區也有機會與水 面聲道中再度接觸。所以深海中,若海底深度足夠深,聲波大部份之 路徑大都在聲速均勻傳播在深海裡,不會碰觸海底,受到反射作用影 響較小,可以傳播到很遠之距離。
第三章 比例導引
3.1 概要 比例導引(Proportional Navigation, PN)應用於水下快速魚雷目標 追擊水面艦時,可將比例導引作為水面艦與魚雷間相對運動航跡控制 [13]。可使魚雷在追擊水面艦過程中,潛艇先以獲得之射控解算,導 引魚雷快速航行,並依據潛艦所提供參考數據控制到接近航行中水面 艦之位置,使魚雷有能力自主的及有效地依比例導引方式追擊甚至摧 毀。故水面艦為防禦魚雷攻擊,首要之務須先要知道魚雷如何攻擊水 面艦,且要對魚雷的運動方式有所瞭解。為瞭解魚雷如何攻擊水面 艦,本文以直航魚雷攻擊水面艦之直航運動來說明其彼此間之關係。 假設等速直航水面艦下,水面艦或潛艇上發射魚雷前,解算魚雷發射 控制條件,進入最原始相對運動之速度與距離解算,攻擊水面艦之場景,才能進入預估碰撞點(Estimate Collision Point, ECP)之觀念。
導引控制亦即是描述被控制的物體與目標物體間相對運動的軌
跡控制。其先假設二者之運動皆採用等速直線航行方式,再作比例導
引關係之說明與探討,建立彼此間之運動方程式,並結合二者相對運
3.2 比例導引的介紹
比例導引法(Proportional Navigation Method)係導控載具運動的
一種方法。比例導引法具形式簡單、技術易於實現,不需要太多資訊, 其航跡比較平直的特性,對運動中之目標,也能有很好地實施攻擊能 力,且導引精度高,故廣泛被應用。然為適應現代戰爭中目標機動能 力強,干擾條件日益惡劣的環境以及高精度命中和高殺傷目標的要 求,為了改善比例導引法的導引特性進行改進,以設計出許多比例導 引的改進形式。 比例導引包括追蹤導引法和提前角(前置角)導引法兩種,追蹤導 引法是使魚雷航行方向總是對準目標,魚雷實施尾追攻擊水面艦目標 時,不改變魚雷的速度大小,只改變其方向,其可實現性和追蹤性能 較強,此法簡單有效。而前置角導引法需先獲知水面艦目標的航跡、 擊中時間與直線攔截航跡方位之訊息,使魚雷跟蹤目標的航線有一個 提前量,保證魚雷始終按照與目標相遇的路線航行,降低雜訊干擾, 最終以接近角度攔截目標,提高目標接近速率,增加鎖定目標機率及 提昇追蹤資料的品質。 比例導引法在基礎理論與實際應用中均有長足的發展,尤其是改 進形式更是得到了廣泛應用。為了滿足高技術條件下的軍事需求,以
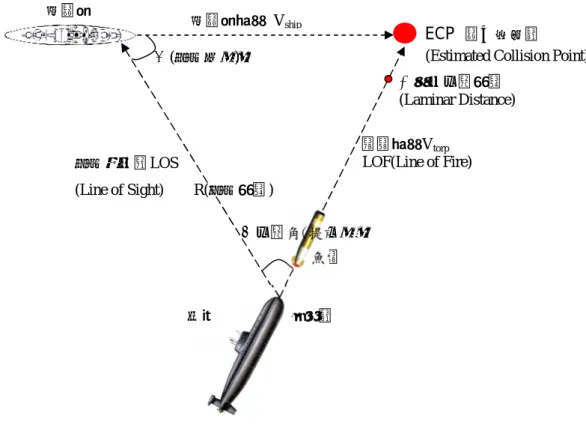
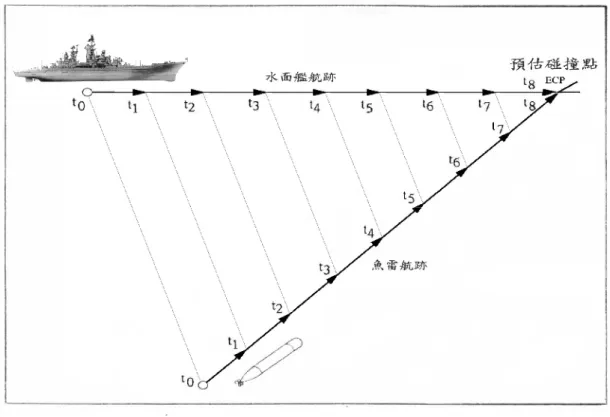
現有的實用導引法為基礎,同時結合實際需要,利用最新的科學知識 與技術,對魚雷跟蹤目標技術作進一步的研究改進和優化設計。 3.3 直航快速運動目標 考量直航魚雷基本攻擊方式,需要先了解擊截之角度。此角度係 一超前角度發射。從發射點算起,到達水面艦之目標視向線(Line of Sight, LOS),通常這個角度在發射前,其相關參數如水面艦之航道、 速度、方位、距離及魚雷速度等資料須先知曉,解算出發射魚雷後, 水面艦航跡與魚雷航跡之交會點位置所在,及魚雷到達此位置之時 間,此位置即所謂預估碰撞點,有關發射艦進行解算直航魚雷之射向 幾何關係圖,如圖 3.1 所示。若水面艦一直維持它的航道和速度不變, 而直航魚雷又能依照解算出來的超前角度航線航行擊截,將可撞擊到 水面艦,以達到擊毁水面艦之目的。而若改變導向前置距離 D (Laminar Distance)為正值,則會擊中艦艉,若為負值,則會擊中艦艏, 由此比例導引之特性,魚雷進入攻擊水面艦範圍,只需採取直航魚雷 方式,故此先將直航魚雷之比例導引關係作二維運動之探討。從直航 魚雷攻擊水面艦到與水面艦相遇所需的時間和與目標的相遇,發射後 已不再考慮或計算,從發射平台一旦啟動直航魚雷,就不用進一步的 導引,以超前角度航線航行擊截觀念導引進入比例導引。
圖 3.1 直航魚雷瞄準水面艦幾何關係圖 從控制魚雷之二維比例導引建立預估碰撞點之觀念,然後才能進 一步解算水面艦防禦之範圍。雖然魚雷在追擊水面艦時,比例導引在 整個攻擊過程中是快速而簡單,但設定及選擇提前角(前置角)與截擊 距離仍須有相當程度的戰術概念與技術知識,在整體水下作戰仍是最 佳之魚雷導引控制設計,在攻擊過程中,魚雷由內部導引或外部導引 穩定航行接近水面艦,再由尋標器自主搜尋到目標後,依比例導引方 法攻擊,會有更適度的戰術表現。 為了容易探究二個載體運動關係,使用預估碰撞點之觀念,本文 使用幾何圖形繪出目標運動分析視覺化,以視覺圖畫的資料對時間、 ECP 預估碰撞點
(Estimated Collision Point)
發射點 水面艦航跡 Vship 目標視向線LOS (Line of Sight) R(目標距離) 魚雷航跡Vtorp LOF(Line of Fire) 水面艦 潛艇 魚雷 θ(目標弦角) φ前置角(提前角) D 導向前置距離 (Laminar Distance)
距離、航跡與方位資料的使用,增強分析載體間運動關係的場景。 視覺化的目的將有助於發現及決策,把數據變成一個視覺化,資料之 訊息經歷定性的改變進階,鼓勵使用人的圖樣識別能力,在空間上鑑 定可能的解答或者危險的解答,以產生魚雷在一個擊截水面艦的去路 畫面,故應用視覺原理來作載體間運動關係的處理,透過視覺化技 術幫助分析,以降低目標運動分析資料的負荷。 3.4 二維比例導引 目前比例導引方法已被廣泛用在目標運動,從傳統到加強型或者 到精進型的比例導引方法,大都在改善比例導引常數,以調整控制速 度方式以利比例導引更加獲得控制於理想情況,為簡化容易瞭解比例 導引之使用,以明白魚雷攻擊水面艦之場景。然魚雷攻擊水面艦之場 景係二維空間,故只要清楚二維空間目標運動之航跡,再加上另一維 (水下深度)即可解決複雜二維目標運動方程式,對於其導引特性進行 了分析。有關魚雷以比例導引追擊水面艦之示意圖,如圖 3.2 所示。
圖 3.2 魚雷以比例導引追擊水面艦
3.5 魚雷危險區之定義
比例導引是魚雷對水面艦實施有效攻擊的導引核心技術,就像任
何武器系統一樣,必然是在武器的射擊範圍內才有射擊中靶的可能
性,這個武器的射擊範圍在水下稱作魚雷危險區域(Torpedo Danger
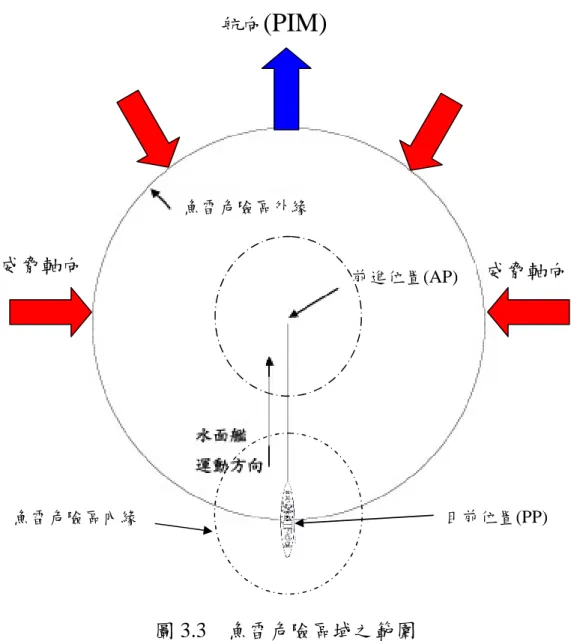
Zone, TDZ),如圖 3.3 所示。其中水面艦之航向(Position of Intended Motion, PIM),前進位置(Advanced Position, AP),目前位置(Present Position, PP)在魚雷危險區是非常重要因素。而水面艦前進位置係前 進速率×魚雷射程/魚雷速率,而魚雷危險區則以前進位置為圓心,魚
圖 3.3 魚雷危險區域之範圍 3.6 潛艦之潛航接近區定義 潛艦使用不同之速率,向魚雷危險區(TDZ)外緣接近,此種界限 範圍邊線以利魚雷攻擊位置及攻擊方位角度,就像任何武器系統一 樣,必然是在武器的射擊範圍內才有射擊中靶的可能,此邊線相切 於魚雷危險區(TDZ)之外緣稱之潛航漸近線,此線為依潛艦之潛航速 航向
(PIM)
威脅軸向 威脅軸向 前進位置(AP) 魚雷危險區外緣 魚雷危險區內緣 目前位置(PP)左右潛航漸近線之間範圍是為潛航接近區,如圖 3.4 所示。 圖 3.4 潛航接近區與魚雷危險區之範圍[4] 3.7 水面艦與魚雷之航向及航速 因為導引控制是魚雷對水面艦實施有效攻擊的重要一環,本文試 圖描繪出水面艦與魚雷間幾何關係使成視覺化,俾便人在視覺上較容 易建立水下之場景概念,並先行瞭解魚雷發射條件,如圖 3.5 所示。 潛航漸近線 潛航漸近線 航向(PIM) 魚雷危險區
潛航接近區
以潛艦發射魚雷所設計之觀點探討,水面艦在 T 段時間保持一航向, 水面艦航速 Vs(節)之間前進,以潛艦初始位置為原點,於潛航接近區 之內,於 T 段時間描繪航跡、偵測目標距離(R)、目標弦角(θ)及導向 前置距離(D),以作射擊控制解算水面艦之運動分析,則潛艇發射魚 雷射控解算通式為
(
)
+ − = sin θ V V R D sin V V sin t s t s ---(3.1) θ cos V cos V cos D R T s t + − = ---(3.2) 依據上式可算出 φ 提前角(前置角)及預估碰撞點(ECP)與預估碰 撞時間(T),此工作完成後,就完成發射魚雷前之準備工作。 圖 3.5 水面艦與魚雷之航向及航速關係圖第四章 目標運動分析
4.1 目標運動分析介紹
本文旨在利用目標運動分析(Target Motion Analysis, TMA)法來
處理聲納在被動測量時接收到目標訊號,且只有魚雷目標之方位訊
息,使用低頻分析記錄(Low Frequency Analyzing and Recording, LFAR)
及時間方位圖(Time/Bearing Plot),作為目標運動分析之重要資料參 考,來估計魚雷目標運動參數,如速度、航向與距離等。在很多準確 的方法無法及時定位水下目標時,可使用目標運動分析之被動聲納方 式找出四週附近可疑的目標,利用被動聲納所獲得的多筆資料,進入 資料處理、過濾、分析及解算目標之搜索、定位、追蹤及目標顯示處 理魚雷目標運動航跡。水面艦偵獲目標後,迅速解算魚雷運動,處理 水面艦四週之噪音資料進行追蹤,透過資料處理解得水下快速魚雷的 目標航跡,為反制攻擊爭取時間。然而在解算過程中,需作目標運動 分析(TMA),相關分析資料來自於水面艦上的被動式聲納資訊,如此 僅能提供魚雷之聲音特性與音源方位,而音源方位變化量之偵測比較 容易分析。另外,水下聲音特性較為複雜且需相關大量資訊分析,作 法上不利於反應魚雷之解算。故本章節使用之目標運動分析著重於目 標方位之變化,較易解算快速魚雷運動目標之主要運動參數,進而解
算目標運動狀態,快速地提供水面艦機動迴避之參考。 4.2 魚雷運動目標特徵背景 目標運動分析提供了使用方位數據去追蹤目標,然而當水下場 景中,主動聲納不是一種可行的選擇時,僅能以被動聲納收到訊號, 用於追蹤水下目標,提供水面艦即時的目標觀測方位。基本上,方 位是一方向,而方位的來源來自於水下目標之噪音,每一種水下目 標(如魚雷、潛艦)都具有其自身特有的噪聲特性,經由船艦之被動聲 納接收,研判其為目標後,經由該目標之方位變化,解算該目標在 作戰場景下之可能位置與相對運動之關係,即是由被動式聲納之目 標偵測、分類、識別、定位、追蹤及方位變率解算出目標運動方式。 魚雷與水面艦於速度之比較上,魚雷速度較水面艦速度快很多。 以相同方向追擊航行來說,魚雷速度較水面艦至少需為 1.5 倍之速 度,這樣之魚雷速度才有機會追上水面艦船,故魚雷於水下航行過程 中的運動變化是較為快速且明顯辨出,尤以魚雷在做歸向階段或搜索 階段時,其輻射噪音的頻率變化會變得更加清楚,水面艦船在威脅有 限時間內,對遠程魚雷目標的低頻弱訊號頻譜偵測、追蹤魚雷特徵訊 息的取得,需完成機動迴避策劃及魚雷反制行動,故水面艦船之聲納 被動偵測目標偵測、識別、定位及目標運動,判斷魚雷特徵應有其專
業之水平。 4.3 魚雷運動目標方位變化 魚雷攻擊水面艦時,在很遠距離會有一個階段是直航的航程,魚 雷以提前角或落後角對水面艦採取攻擊運動,此時魚雷相對於水面艦 之方位變化不會很大。然魚雷偵搜到水面艦,進入攻擊航程時,魚雷 之速度將變得很快,以利其快速接近攻擊水面艦,此時魚雷方位變化 會突然變得很大,與其他階段的運動方位有明顯之差異。 水面艦為了偵測魚雷在水下環境遠距離之訊號,需考量偵獲魚雷 訊息資料會受到海洋水文之因素影響,此影響常常會使目標訊息產生 中斷不連續現象,或是只能獲得目標的部份訊息,從而使水面艦偵測 到的目標訊息是不完整的,所以偵測可疑魚雷目標之全程訊息資料, 為水面艦追蹤魚雷的關鍵,所以估算魚雷目標運動訊號數值的過程 中,被動聲納偵測魚雷之情況,簡化利用魚雷目標之方位訊號,用於 水下場景之評估,以完成目標之偵測、定位、追蹤及運動分析,進而 機動迴避及來襲之防禦。 4.4 被動式目標運動分析 被 動 式 目 標 運 動 分 析 的 基 本 參 數 包 括 有 目 標 速 率 (Target • ⋅
(Bearing Rate),其中方位變率是用來導出目標速率、航向與距離。 時間方位圖(Time/Bearing Plot)是所有被動式目標運動分析技術
之基石,對一個以定遠、定航向從遠距離接近之目標而言,從目標之
時間方位圖資顯示,若本艦維持定遠、定航向,起初目標之相關方位
變化很緩慢,但隨著距離接近方位變化率增加,當目標逼近最接近點
時(Closest Point of Arrival, CPA),則方位變化率快速增大,當到達最
接近點時,方位變化率達到最大值,而後隨著距離之增加,則方位變
4.5 目標數據處理 處理魚雷運動目標之數據,儘可能準確地概括魚雷運動資料中的 關鍵數據資訊分析魚雷目標輻射噪音之特性與其他水下及水面目標 較明顯的區別,用於魚雷預警的基本特徵,對魚雷目標的方位追蹤, 基於被動聲納的方式,提出魚雷預警系統的初步方案,並探討利用魚 雷誘標攔截來襲魚雷的可行性。 因接收之數值資料有很大程度的誤差或雜訊,且為非連續數值, 故須採取估測方法,先行推論單一曲線,以代表此數值資料的傾向或 趨勢。因為任何個別單一的資料點可能是錯誤的,故不需將每一點都 要很精確的計算出來,如圖 4.2 所示。而僅以最小平方迴歸法(Least
Squares Regression Method, LSRM)處理目標運動航程為一組的點樣 式圖形。
(a)Regression (b)Curve Fitting 圖 4.2 點樣式圖形 x a a y= 0+ 1 x y xi yi 2 2 1 0 a x a x a y = + + x y xi yi
假 設 要 以 一 條 直 線 去 作 成 對 的 平 面 直 角 座 標 設 定 點
(
x1, y1)
(
x2, y2)
……,(
x ,n yn)
,如圖 4.2 (a)所示,該直線之方程式可表示如 下: y=a0 +a1x+Ei,這裡的a0, a1未知,殘餘誤差 Ei 在真實值(yi) 與近似值(a0+a1x)經由直線方程式預測,規範最小殘餘誤差總和 Sr, 數學上可以表達為:∑
∑
(
)
= = − − = = n i i i n i i r E y a a x S 1 2 1 0 1 2 為了決定 a0, a1的值,Sr對每一係數微分(
)
(
)
(
)
∑
∑
∑
= = = − − − = ∂ − − ∂ = ∂ − − ∂ = ∂ ∂ = n i i i n i i i n i i i r x a a y a x a a y a x a a y a S 1 1 0 1 0 2 1 0 0 1 2 1 0 0 2 0 --- (4.1)(
)
(
)
(
)
i n i i i n i i i n i i i r x x a a y a x a a y a x a a y a S∑
∑
∑
= = = − − − = ∂ − − ∂ = ∂ − − ∂ = ∂ ∂ = 1 1 0 1 1 2 1 0 1 1 2 1 0 1 2 0 --- (4.2) 由式(4.1)與式(4.2)可得∑
∑
+∑
∑
=∑
= + i i i i i i y x a x a x y a x na 1 2 0 1 0 = ∑
∑
∑
∑
∑
i i i i i i x y y a a x x x n 1 0 2( )
∑
∑
∑
∑ ∑
− − = 2 2 1 i i i i i i x x n y x y x n a x a y a0 = − 1 註:y,x分別是 y , x 的平均值 解出a0, a1二值代入直線方程式:y =a0 +a1x,解得直線方程式 4.6 將數據使用 m 階多項式 通常一些工程資料無法透過一條直線完全表達,為此,最小平方 迴歸法可以將所有數據使用 m 階多項式表示,亦稱之為多項式迴歸 法(Polynomial Regression)。 m 階多項式:y=a +a x+a x +...+amxm 2 2 1 0 --- (4.3) 為此殘值誤差平方總和:(
)
∑
= − − − − = n i m i m i i i r y a a x a x a x S 1 2 2 2 1 0 ... --- (4.4)依據前面部份的程序,對 Sr偏微分可得多項式係數為
(
)
(
)
(
)
(
)
+ + + − = ∂ ∂ = + + + − = ∂ ∂ = + + + − = ∂ ∂ = + + + − = ∂ ∂ =∑
∑
∑
∑
= = = = n i m i m i m i i m r n i i m i m i i r n i i m i m i i r n i m i m i i r x x a x a x a a a S x x a x a x a a a S x x a x a x a a a S x a x a x a a a S 1 2 2 1 0 1 2 2 2 1 0 2 1 1 2 2 1 0 1 1 2 2 1 0 0 ... 2 0 ... ... 2 0 ... 2 0 ... 2 0 --- (4.5) 這些等式可以設為 0,及重組成一般方程式為 = + + + = + + + = + + + = + + +∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
+ + + + i m i m i m m i m i m i i i m i m i i i i m i m i i i i m i m i i y x x a x a x a x a y x x a x a x a x a y x x a x a x a x a y x a x a x a n a i 2 2 2 1 1 0 2 2 4 2 3 1 2 0 1 3 2 2 1 0 2 2 1 0 ... ... ... ... ... --- (4.6) 由上列 m+1 方程式,可以解得a0 ,a1,a2,a3,a4,a5,...,am值, 解出a0 ,a1,a2,a3,a4,a5,...,am值,且代入 m+1 方程式,可得到 m mx a x a x a a y= 0 + 1 + 2 2 +...+ ,並依方程式繪出點樣式圖形。 4.7 目標運動分析視覺化方法 以下場景將相關方位以 θ 度設計,並以水面艦執行任務,分析魚 雷從不同角度攻擊,魚雷聲納啟動,開始搜索(Enable),被動搜索航程,導引控制至預估碰撞點(ECP),水面艦接收相關訊息後,利用訊 息使用目標運動分析處理魚雷航跡,並以幾何圖形方式將其視覺化, 使水面艦指揮者或操作者,立即反應訊息之變化,使水面艦迴避魚雷 之攻擊,如圖 4.3 所示。 圖 4.3 場景之魚雷危險區示意圖 水面艦執行巡邏任務時,艦艏聲納設定在被動傾聽模式,水面艦 航向 γ°真方位,速率 Vs節,時間 T:t1~tm,聲納偵測到魚雷接觸「魚 雷效應」,啟動預警系統,目標方位之觀測值 θ 分別為 θ1 θm度, 由多項式迴歸分析法估算並繪製時方圖(Bearing-Time Plot),估算來 襲魚雷「航向」、「速率」及「與本艦距離」。其餘訊息如下: 魚雷威脅區 (魚雷危險區內緣)
航向(PIM)
威
脅軸向
目前位置(PP) 前進位置(AP) 魚雷危險區 (外緣)0分30秒 (0030) 「魚雷效應相關方位θ2」 0分45秒 (0045) 「魚雷效應相關方位θ3」 1分鐘 (0060) 「魚雷效應相關方位θ4」 1分30秒 (0090) 「魚雷效應相關方位θ5」 2分鐘 (0120) 「魚雷效應相關方位θ6」 2分30秒 (0150) 「魚雷效應相關方位θ7」 3分鐘 (0180) 「魚雷效應相關方位θ8」 水面艦人員需先行估算來襲魚雷之「航向」、「速率」及「與本 艦距離」,水面艦航行速度 Vs節,魚雷方位為 θ 度,且以往 ECP 之 方向前進,魚雷速度約為 1.5Vs節,為魚雷能趕上水面艦之位移,魚 雷速度至少是水面艦船速之 1.5 倍才有機會追逐到水面艦,整個場景 如圖 4.4 所示。
本題以相關方位之第 3 個方位資料計算為向本艦航行距離約為 R 計算,如圖 4.5 所示。第 4 個數據就可斷定魚雷是往水面艦攻擊,第 5 個數據以後資料就更可以看出魚雷是在水下高速運動之目標,與一 般潛艦相比,魚雷速度遠大於一般潛艦。故魚雷若搜索到水面艦目標 並確認後,魚雷即鎖定目標進行歸向攻擊,此時魚雷攻擊階段與直航 階段之方位變化會突然變大,此與一般潛艦運動特徵有明顯之區分, 故方位變化率到達某一數值時,即可作為研判標準。當然另外亦可利 用輻射噪音頻譜方式確認,意即水下聲學方面之應用,如果有足夠時 間作魚雷目標識別,此時只是將水下魚雷目標視為更確定而已,本章 節純為目標運動分析之角度觀察,在輻射噪音方面,在第二章節已有 論述相關魚雷獨特噪音訊號及暫態訊號之問題,故本章節不再討論。
在水面艦與聲射歸向魚雷規避機動對抗的數學模型,則可利用三 角函數得知,如水面艦航行速度 Vs節,魚雷方位為 θ 度往 ECP 之方 向前進,本題以第 3 筆訊息數據計算作為起點,魚雷歸向水面艦航行 距離為 R 公尺計算,前置距離為 D 公尺,計算出魚雷發射航行角度 (φ),以及魚雷到 ECP 之時間(T),其相關計算方式及結果如下: 故
(
+)
= sin θ V V R D θ sin V V sin t s t s(
)
+ = sin θ V V R D θ sin 1.5V V sin t s s s 因 Vs、R 及 D 值為已知 可解算得出 φ=ω°,代入下式 " θ cos V cos V cos D R T s t = + − = 到達 ECP 時間為" 總結: 估算來襲魚雷「航向」:160°+ω°真方位 估算來襲魚雷「速率」:約 1.5Vs節 估算來襲魚雷「與本艦距離」:約為 R 公尺 估算來襲魚雷到達 ECP 時間:"i 1 2 3 4 5 6 7 8 xi t1 t2 t3 t4 t5 t6 t7 t8 yi θ1 θ2 θ3 θ4 θ5 θ6 θ7 θ8 由多項式
y
=
a
0+
a
1x
+
a
2x
2 則方程式為 = + + = + + = + +∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
i i i i i i i i i i i i y x x a x a x a y x x a x a x a y x a x a n a i 2 4 2 3 1 2 0 3 2 2 1 0 2 2 1 0 --- (4.7) 由上列方程式,可以解得a0 ,a1,a2值 解出a0 ,a1,a2值,且代入方程式,可得到 2 2 1 0 a x a x a y = + + ,並 依方程式繪出點樣式圖形。 利用 Matlab 工具軟體,程式如下: uu=[n Σxi Σxi 2 ; xi xi 2 xi 3 Σxiyi; xi 2 xi 3 xi 4 Σxi 2 yi] vv=[Σyi; Σxiyi; Σxi 2 yi] ww=inv(uu)*vv ww = [a0 a1 a2]即:a0=K0、a1=K1、a2= K2
則多項式為
y
=
a
0+
a
1x
+
a
2x
2利用 Matlab 工具軟體,依所得方程式繪製時方圖,如圖 4.5 所示。
yi=[ θ1 θ2 θ3 θ4 θ5 θ6 θ7 θ8] plot(yi,xi,'*') plot(yi,xi) n=8 a0=K0 a1=K1 a2=K2 x=15:10:180 y=a0+a1*x+a2*x.^2 plot(yi,xi,'*',y,x) 以上 Matlab 程式執行後結果,如圖 4.5 所示。 4.8 場景運動分析結果 綜合本章以不同威脅軸向,透過場景使用方位探討 φ 之大小變 化,魚雷發射航行角度(φ),
(
)
+ − = − sin θ V V R D sin V V sin t s t s 1 ,由 式中與 φ 有相關之參數,例如 t s V V 比值、 R D 比值及 θ 數值,分別分析 與 φ 值之關係。 在 φ 與 t s V V 比值方面,Vs為固定值,Vt以 1~5 倍於Vs,計算 φ 值,如表 4.1 所示,並繪出其關係,如圖 4.6 所示。結果顯示 t s V V 比值 越小則 φ 值越小,亦即 Vt值越大於 Vs值, t s V V 愈小時,表示相對於魚 雷而言,船艦近乎停止,魚雷發射航行角度 φ 值≈0,意謂相當於以當發現 φ 值很小時,此時水面艦需要立即反應的時間也變短了,故 可知 t s V V 比值與 φ 值關係,將影響到水面艦之逃離機會與判定魚雷攻 擊目標之參考。 表 4.1 φ 與 t s V V 比值關係表 Vs/Vt 1/1 1/1.5 1/2 1/2.5 1/3 1/3.5 1/4 1/4.5 1/5 φ 57 33 24 19 15 13 12 11 9 φ 與 Vs/ Vt比 值 之 關 係 Vs/ Vt 圖 4.6 φ 與 t s V V 比值之關係圖 在 φ 與 R D 比值方面,R 為固定值,D 每以增加 100 公尺,計算 φ 值,如表 4.2 所示,並繪出其關係如圖 4.7。結果顯示 D 值在 500 至 1,000 之間,魚雷發射航行角度 φ 值變異不大,對於 φ 值而言,意謂 試中
(
+)
sin V V R D t s 之值影響 sin V V t s 之值不大,何況 D 值是潛艦射控解之設定值,故水面艦為便於快速解算 φ 值,以及計算魚雷航 行到達 ECP 時間,暫時可將式中之
(
+)
sin V V R D t s 忽略,以利於水 面艦快速解算。 表 4.2 φ 與 R D 比值關係表 D/R 500/4K 600/4K 700/4K 800/4K 900/4K 1K/4K 0.125 0.15 0.175 0.2 0.225 0.25 φ 33 32 31 30 29 27 φ與D/R比值之關係 D/R 圖 4.7 φ 與 R D 比值之關係圖 在 φ 與θ值方面,θ值設定在 10 度至 90 度,每次以增加 10 度 計算 φ 值,如表 4.3 所示。且繪出其關係,如圖 4.8 所示。從圖 4.8 結果顯示,θ值在 10 度至 90 度之間,魚雷發射航行角度 φ 值變異不 大,所以本研究之場景,將相關方位設計,分析魚雷從不同角度攻擊,操作者能立即反應訊息之變化,增加水面艦迴避魚雷攻擊之機會。 表 4.3 φ 與 θ 值關係表 θ(度) 10 20 30 40 50 60 70 80 90 φ(度) 5 11 16 21 25 30 33 36 37 φ與θ之關係 θ φ 圖 4.8 φ 與 θ 值之關係圖
第五章 目標運動模擬
5.1 場景模擬目的 本章節目的旨在利用前面章節所陳述的比例導引、水下聲學與目 標運動分析等相關內容,定出一水下場景,以模擬水面艦與魚雷兩者 運動之相互關係,並透過前面章節所提及之方法與學理來設計場景, 想定水下場景並設定水下之水文環境,藉以驗證在實際水面艦作反魚 雷措施,依魚雷在水下攻擊特有之航行運動,預測魚雷航跡,藉魚雷 在聲學之應用,利用接收之數據,分析其運動,並繪出幾何圖形場景 模擬魚雷攻擊水面艦行動,以及水面艦迴避之可行性。 水面艦反魚雷定義是從水面艦搜索到魚雷目標開始,到水面艦徹 底脫離魚雷接觸為止,整個魚雷攻擊水面艦之敵對行動。假設我水面 艦於海面上航行執行巡弋任務,其水下自我防禦系統啟動,艦艏聲納 以被動方式運作。同時我水面艦相關資訊:本艦巡航速度為 18 節, 機動迴避最大速度 30 節、運動回轉半徑 800 公尺、與魚雷初始間距 離 10,000 公尺、魚雷與我艦相對初始航行舷角 70 度。來襲魚雷相關 資訊:魚雷速度:30 節、最大航程 30,000 公尺、聲射歸向魚雷自導 距離:2,000 公尺、回轉運動半徑 100 公尺。誘標相關資訊:射程最 大 3,000 公尺、最小 500 公尺。5.2 水面艦與魚雷目標搜索階段 想定我水面艦於海面上航行執行巡弋任務時,其水下自我防禦系 統啟動,艦艏聲納以被動方式運作。當我水面艦遭遇敵潛艇以聲射魚 雷攻擊時,此時敵潛艇尚未被我水面艦發現,而艦艏聲納偵聽接收到 螺槳推進聲射訊號之來襲魚雷有「疑似魚雷」聲射訊號,以及偵測到 敵潛艇相對於我水面艦右舷之方位。此時確定是否有水下快速之魚雷 目標航行?距離是否離本艦有 10,000 公尺左右或者還遠?水面上是 否還有其他之船隻,空中是否有其他飛行器?相關在本艦周圍之運動 目標訊息,皆須記錄在航海圖上,以利於掌握整個場景,指揮者可據 以作決策使用,相關位置幾何圖,如圖 5.1 所示。
敵潛艦在偵測我水面艦之運動航跡相關資訊,經射控解算取得提 前角參數後發射聲射歸向魚雷。潛艦射控解算魚雷參數設定發射及控 制航行,如圖 5.1 示意圖,直航到距離水面艦 4,000 公尺後,開始搜 索(Enable),魚雷聲納啟動被動搜索航程,若搜索到水面艦目標並確 認後,魚雷即鎖定目標進行歸向攻擊,直到魚雷到達 ECP 位置,仍 未發現水面艦目標,則從 ECP 位置附近反向圓形搜索,若仍然沒有 發現水面艦就再次搜索,再依原航向直航一段距離,8~10 秒時間, 再次反向圓形搜索,依此程控以此類推,直到航程能量耗盡,如圖 5.2 所示。 圖 5.2 潛艦射控解算到達 ECP 示意圖
對於聲射歸向魚雷進入歸向水面艦後,假定依搜索到有水面艦之 訊號,即往其方向鎖定航行。當魚雷與水面艦之間距離小於某一數值 時,如磁引信在 6~8 公尺處感應到磁通量,即會引爆魚雷命中目標, 模擬結果結束。 5.3 目標定位解算階段 水面艦執行巡邏任務時,艦艏聲納設定在被動傾聽模式,本艦航 向 160°真方位,速率 18 節,時間 24:00,聲納偵測到魚雷接觸「魚 雷效應」、「相關方位 70.0 度」,其目標方位之觀測值訊息分別如 下: 0分15秒 (0015) 「魚雷效應相關方位70.1」 0分30秒 (0030) 「魚雷效應相關方位70.3」 0分45秒 (0045) 「魚雷效應相關方位70.5」 1分鐘 (0060) 「魚雷效應相關方位71.1」 1分30秒 (0090) 「魚雷效應相關方位71.7」 2分鐘 (0120) 「魚雷效應相關方位72.5」 2分30秒 (0150) 「魚雷效應相關方位74.2」 3分鐘 (0180) 「魚雷效應相關方位77.2」 在訊息資料之第4筆數據確定後,就立即啟動預警系統,繪製時
方圖(Bearing-Time Plot),並估算來襲魚雷「航向」、「速率」及「與 本艦距離」。先行估算來襲魚雷之「航向」、「速率」及「與本艦距 離」,水面艦航行速度(Vs)18節約為9公尺/秒,魚雷方位為70度往ECP 之方向前進1.5Vs=13.5公尺/秒,約27節,本題以第3筆訊息數據計算 作為起點,魚雷歸向本艦航行距離約4,000公尺計算,其相關計算方 式及結果如下。 故
(
+)
= sin θ V V R D θ sin V V sin t s t s(
)
+ = 70 sin 13.5 9 4000 500 70 sin 13.5 9 sin --- (5.1) 626 . 0 sin 028 . 1 cos 077 . 0 + = 解算得出 φ=33°,代入下式 " 7 ' 4 " 248 70 cos 9 33 cos 5 . 13 33 cos 500 4000 θ cos V cos V cos D R T s t = = + − = + − = --- (5.2) 到達 ECP 時間為4' 7" 總結: 估算來襲魚雷「航向」:160°+33°=193°真方位 估算來襲魚雷「速率」:約 27 節 估算來襲魚雷「與本艦距離」:約為 4,000 公尺 估算來襲魚雷到達 ECP 時間:4' 7"由多項式
y
=
a
0+
a
1x
+
a
2x
2得知,來襲魚雷到達 ECP 之位置、速度 與加速度之方程式為 = + + = + + = + +∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
i i i i i i i i i i i i y x x a x a x a y x x a x a x a y x a x a n a i 2 4 2 3 1 2 0 3 2 2 1 0 2 2 1 0 帶入上述之數據,則來襲魚雷到達 ECP 之位置、速度與加速度之方 程式變為 6274755 = a 1846901250 + 12001500a + 84150a 50792.4 = 12001500a + 84150a + 690a 577.79 = 84150a + 690a + 8a 2 1 0 2 1 0 2 1 0 利用 Matlab 工具軟體求解來襲魚雷到達 ECP 之位置、速度與加速 度,其整個求解程式如下: uu=[8 690 84150; 690 84150 12001500; 84150 12001500 1846901250] vv=[577.79;50792.4;6274755] ww=inv(uu)*vv ww = [70.4626 -0.0115 0.0003]即:a0=70.4626、a1=-0.0115、a2=0.0003
則多項式為
y
=
70.4626
-
0.0115
x
+
0.0003
x
2利用 Matlab 工具軟體,依所得方程式繪製曲線圖,如圖 5.3 所
示。而 Matlab 程式如下所示:
yi=[70.1 70.3 70.5 71.1 71.7 72.5 74.2 77.2] plot(yi,xi,'*') plot(yi,xi) n=8 a0=70.4626 a1=-0.0115 a2=0.0003 x=15:10:180 y=a0+a1*x+a2*x.^2 plot(yi,xi,'*',y,x) 以上 Matlab 程式執行後模擬場景之時方圖結果,如圖 5.3 所示。 圖 5.3 模擬場景之時方圖 5.4 本艦確認防禦階段
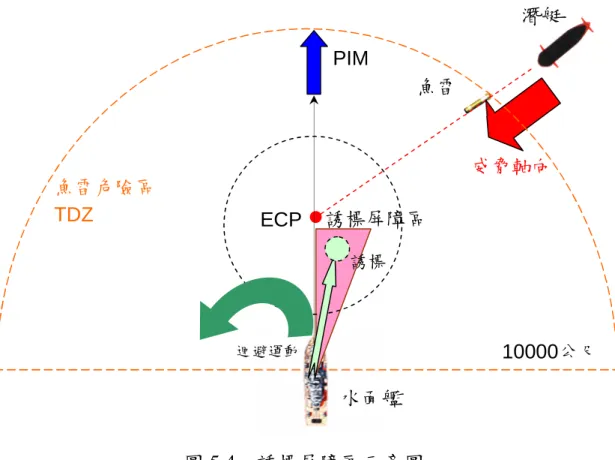
艦於執行巡弋任務時,其水下自我防禦系統啟動,艦艏聲納以被動方 式運作,艦艏聲納偵聽接收到來襲魚雷螺槳推進聲射訊號,此時水面 艦將立刻研判魚雷危險區外緣之威脅軸向,確定水面艦之威脅在那 裡,以進一步研析魚雷來襲之狀況。當聲納偵測之資料顯示為魚雷在 直航攔截階段或者是在尋標追逐階段,可利用 5.3 節所述之目標定位 解算該階段之第 1 筆資料前段,有助於確定本艦確認防禦有利之資 料。 5.5 決策輔助階段 在場景之模擬中,水面艦於海面上航行執行巡弋任務,獲悉魚雷 預警,綜合本艦特性、航行計畫、來襲魚雷特性及魚雷航跡等訊息, 將目標定位解算、訊息處理、訊息分析、顯示接戰現況、使用誘標防 禦、魚雷類型、接戰時間、機動迴避運動措施及反制措施等,輔助指 揮者快速發佈指令與動作。決策輔助須解算預估碰撞點、機動迴避最 佳路徑建議、誘標屏障區及反制措施狀況等,將相關資訊顯示於航海 圖上,以提供指揮者快速反應及下達決策建議。 5.6 水面艦使用聲射誘標時機 水面艦為與來襲魚雷進行對抗,除了進行本艦之機動迴避運動
![圖 2.1 噪音頻譜[6]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7270738.69493/26.896.184.715.277.1066/圖21噪音頻譜6.webp)
![圖 2.2 溫深彈與聲速剖面圖[7,8] 2.5 聲波之音傳路徑 聲波在水下傳播時,受到溫度、鹽度、及壓力的因素,造成音傳 路徑是不規則的,其中原因是聲波由一介質進入另一介質時,聲速在 傳播時會有變化,其特性為向速度更慢的方向產生折射。在一定之深 度或距離內聲速改變越大,其折射程度也越大。聲速與深度及溫度關 係之音傳路徑有:(1)聲速直線傳播,聲速不隨深度改變,聲波在溫 度和深度曲線呈微負梯度時,恒速下直線傳播;(2)當溫度隨深度增 加而下降,造成負梯度時,聲波明顯偏向水底折射。超過聲波折射範 圍之區域,稱](https://thumb-ap.123doks.com/thumbv2/9libinfo/7270738.69493/29.896.193.699.112.426/距離內聲速改變越大其折射程度也越大聲速與深度及溫度關音傳度時.webp)