國
立
交
通
大
學
電控工程研究所
碩
士
論
文
整合資料預測控制與具有延遲及訊息遺失
之網路伺服馬達控制系統
Integration of the Data-based Predictive Control
with the Delay and Missing-message Compensation
on Networked Servo Motor Control Systems
研 究 生:張志嘉
指導教授:徐保羅 博士
整合資料預測控制與具有延遲及訊息遺失
之網路伺服馬達控制系統
Integration of the Data-based Predictive Control
with the Delay and Missing-message Compensation
on Networked Servo Motor Control Systems
研究生:張志嘉 Student:Chih-Chia Chang
指導教授:徐保羅 博士
Advisor:Dr. Pau-Lo Hsu
國 立 交 通 大 學
電機與控制工程學系
碩 士 論 文
A Thesis
Submitted to Department of Electrical and Control Engineering College of Electrical and Computer Engineering
National Chiao-Tung University in Partial Fulfillment of the Requirements
for the Degree of Master in
Electrical and Control Engineering January 2014
Hsinchu, Taiwan, Republic of China
i
整合資料預測控制與具有延遲及訊息遺失
之網路伺服馬達控制系統
研究生:張志嘉 指導教授:徐保羅 博士
國立交通大學 電控工程研究所
摘要
網路化控制在工業上已經成為一種趨勢,然而,伴隨網路化產生的時間延遲 和資料的遺失等問題,輕則降低系統效能,重則使整個系統不穩定。本研究以時 間延遲完全補償策略(Perfect Delay Compensation, PDC)處理網路時間延遲的問題。 PDC 將延遲的影響簡化為原閉迴路系統串接一時間延遲,避免系統不穩定。針 對 資 料 遺 失 的 處 理 以 即 時 轉 移 機 率 估 測 器 和 智 慧 型 訊 息 估 測 器 (Intelligent Message Estimator, IME)作資料遺失的補償。即時轉移機率估測器利用即時短時 間內訊息遺失的機率快速地計算出轉移機率,成功且有效率的監控資料遺失的分 佈情形,並以估測出的轉移機率來切換不同的補償器來補償不同分佈的資料遺失。 為了將 IME 應用於不同的網路控制系統中,提出資料預測控制器(Data-based Predictive Controller, DPC)及時地計算出最符合預期響應之控制訊號,並與即時 轉移機率估測器搭配,作為 IME 補償區間切換的指標。最後結合了 DPC、IME 與 PDC,以不受限於單一系統的架構,同時處理了網路資料遺失與時間延遲的 對控制系統產生的影響。經模擬及實驗證明本論文所提出的架構,皆能有效且簡 單應用在實際的網路控制系統上,達成網路時間延遲及訊息遺失的補償效果,提 升網路控制的效能。ii
Integration of the Data-based Predictive Control
with the Delay and Missing-message Compensation
on Networked Servo Motor Control Systems
Student: Chih-Chia Chang Advisor: Dr. Pau-Lo Hsu
Institute of Electrical and Control Engineering
National Chiao Tung University
ABSTRACT
In the network control systems (NCS), both data dropout and time delay greatly affect control performance and stability. In this study, the perfect delay compensation (PDC) is applied to eliminate the network-induced delay effect on the NCS with an AC servo motor, Ethernet, Zigbee, CAN bus. Moreover, applying the least square algorithm and real-time estimation of the transition probability for data dropout, the intelligent message estimator (IME) in a switching mechanism based on the estimated transition probability is developed to reliably estimate the missing message with different dropout distributions. Furthermore, the data-base predictive controller (DPC) is implemented on NCS in this Thesis to predict the best control signals by optimizing system performance. By combining the IME and the predicted signal from DPC, the automatic switching mechanism of IME under different data dropout rates is thus obtained. Finally, the integrated compensator combining all the PDC, IME and DPC leads to satisfactory compensation results to deal with both the time delay and the data dropout in NCS.
iii
致謝
首先要感謝我的指導教授徐保羅老師這兩年來對我的指導,讓我在研究上遇 到瓶頸與挫折,或是迷失方向時,能夠找到正確的出路,使我能順利的完成碩士 學位。同時也要感謝口試委員蕭得聖老師、黃育綸老師、鄭兆凱副總對於本論文 的批評指正,以及寶貴的建議,使得本論文更加完整。 亦感謝實驗室的學長、同學與學弟們:博士班賴建良學長、謝鎮州學長、黃 煒生學長,平時給我的指導與幫助,以及葉釗甫學長、林軒正學長、蔡政宏學長、 廖子期學長、黃思翰學長、郭志瀚學長、林信佑學長、黃琮昇學長給我的寶貴意 見及解惑,誌緯、晟傑、振文、昱安、家豪、竣凱在學業上的相互切磋與指教, 並且時常分享生活趣事讓實驗室充滿歡笑與活力。特別對林信佑學長、以及誌緯、 晟傑、振文在研究與實驗上的大力幫忙,獻上誠摯的感謝。 最後要感謝所有關心我的父母、哥哥、女友以及老朋友們,長久以來在我生 活上的支持與鼓勵,使我能全心全意的專注在課業與研究上,願將此榮耀與喜悅 和他們一起分享。iv
目錄
摘要... i ABSTRACT ... ii 目錄... iv 圖目錄... vii 表目錄... i 第一章 緒論... 1 1.1 研究動機與目的... 1 1.2 研究背景與發展概況... 1 1.3 問題描述... 4 1.4 研究方法... 4 1.5 論文架構... 5 第二章 實驗平台與模擬環境... 6 2.1 CAN 網路協定 ... 6 2.2 Zigbee 網路協定 ... 7 2.3 乙太網路(Ethernet)協定 ... 11 2.3.1 TCP/IP 通訊協定 ... 13 2.4 Truetime 模擬環境 ... 14 2.4.1 Truetime Kernel 區塊 ... 14 2.4.2 Truetime 無線網路區塊 ... 15 2.4.3 802.15.4 (ZigBee) ... 17 2.4.4 網路控制系統模擬環境介面 ... 18 2.5 網路控制系統實驗平台架構... 19 第三章 時間延遲討論... 22 3.1 時間延遲的影響... 22v 3.2 時間延遲之量測與產生... 24 3.2.1 Zigbee 網路的時間延遲 ... 24 3.2.2 網路系統時間延遲量測 ... 25 3.2.3 固定時間延遲的產生 ... 26 3.3 時間延遲補償... 27
3.3.1 完美延遲補償機制(Perfect Delay Compensation, PDC) ... 27
3.3.2 PDC 模擬結果 ... 29 3.3.3 PDC 實驗結果 ... 31 第四章 資料遺失討論 ... 34 4.1 資料遺失介紹... 34 4.2 即時轉移機率估測器... 35 4.2.1 資料遺失分布的影響 ... 35
4.2.2 Two-state Markov Chain 網路模型 ... 37
4.2.3 即時轉移機率估測器(Transition Probability Estimator) .. 40
4.3 訊息估測與最小平方估測器... 42
4.4 智慧型訊息估測器(Intelligent Message Estimator, IME) ... 45
4.4.1 四種不同切換策略的 IME 架構 ... 47 4.4.2 IME 的模擬結果 ... 49 4.4.3 IME 的實驗結果 ... 51 4.5 各種資料遺失補償架構結果比較... 56 第五章 資料預測控制器 ... 58 5.1 預測控制器介紹... 58
5.2 資料預測控制器(Data-based Predictive Controller, DPC) ... 60
5.2.1 系統輸入輸出模型推導 ... 61
vi 5.2.3 資料預測控制器公式推導 ... 66 5.2.4 控制器參數設計 ... 68 5.3 資料預測控制器實現... 69 5.4 DPC 應用於網路資料遺失補償 ... 73 5.5 DPC 與 IME 資料遺失補償效能比較 ... 75 5.5.1 不同命令訊號下的資料遺失補償 ... 75 5.5.2 DPC 於網路資料遺失補償的缺點 ... 80 5.6 結合 DPC 與 IME 應用於資料遺失補償 ... 91 第六章 時間延遲與資料遺失綜合討論... 97 6.1 時間延遲與資料遺失關係... 97 6.2 不同資料遺失率與時間延遲模擬於網路控制系統中... 98 6.3 時間延遲與資料遺失補償實驗... 106 6.3.1 遠端控制實驗 ... 106 6.3.2 Zigbee 干擾實驗 ... 107 第七章 結論與未來發展... 114 7.1 結論... 114 7.2 未來發展... 115 參考文獻... 116
vii
圖目錄
圖 2-1 IEEE 802.15.4 操作頻帶示意圖... 7 圖 2-2 同步模式(Beacon Mode)資料傳送行為 ... 8 圖 2-3 非同步模式(Non-Beacon Mode)資料傳送行為 ... 8 圖 2-4 ZigBee 網路拓撲架構 ... 10 圖 2-5 Jennic JN5121 微控制器... 10 圖 2-6 JN5121 周邊介面 ... 11 圖 2-7 Truetime Kernel 以分割片段方式執行使用者定義程式碼 ... 15 圖 2-8 Truetime 模擬封包傳輸示意圖 ... 15 圖 2-9 Truetime 無線網路區塊對話框 ... 16 圖 2-10 Truetime 模擬網路控制系統介面 ... 18 圖 2-11 網路控制實驗架構 ... 19 圖 2-12DSP 端實驗平台圖 ... 20 圖 2-13 Zigbee 感測器網路示意圖 ... 21 圖 2-14 遠端網路控制實驗架構 ... 21 圖 3-1 網路控制系統方塊圖 ... 22 圖 3-2 時間延遲對系統影響圖(delay time = 20 ms) ... 23 圖 3-3 時間延遲對系統影響圖(delay time = 100 ms) ... 23 圖 3-4 取樣頻率為 20ms 時 Zigbee 網路控制系統響應圖 ... 24 圖 3-5 取樣頻率為 50ms 時 Zigbee 網路控制系統響應圖 ... 25 圖 3-6 延遲時間計算 ... 26 圖 3-7 回授端加 Buffer 示意圖 ... 27 圖 3-8 PDC 應用於網路控制系統 ... 28 圖 3-9 未加入 PDC 的系統響應 ... 29 圖 3-10 PDC 加入前後的步階響應比較 ... 30viii 圖 3-11 PDC 加入前後的弦波響應比較 ... 30 圖 3-12 遠端網路控制系統響應 ... 31 圖 3-13 遠端控制的時間延遲 ... 32 圖 3-14 加入 PDC 後的遠端控制響應 ... 32 圖 4-1 (a)事件觸發(event-trigger)示意圖 (b)時間觸發(time-trigger)示意圖 ... 34 圖 4-2 資料遺失示意圖 ... 35 圖 4-3 (a)分散式與 (b)集中式的資料遺失 (20%資料遺失率) ... 36 圖 4-4 追跡誤差於(a)分散式 (b)集中式資料遺失 (20%資料遺失率) ... 37
圖 4-5 Two-state Markov chain 網路模型 ... 38
圖 4-6 在D,D 0.5的情況下即時計算局部的 transition probabilityˆD,D(k) ... 42 圖 4-7 不同估測方式的示意圖 ... 43 圖 4-8 IME 架構圖 ... 47 圖 4-9 IME 應用於網路控制系統補償架構圖 ... 48 圖 4-10 網路控制系統模擬之弦波命令 ... 49 圖 4-11 one-delay 於 20%資料遺失率補償之模擬結果 ... 49 圖 4-12 IME 於 20%資料遺失率補償之模擬結果... 50
圖 4-13 IME_1 與 one-delay 於不同資料遺失率補償之模擬結果比較(a)20% (b)40% (c)60% ... 51 圖 4-14 one-delay 於 20%資料遺失率補償之實驗結果 ... 52 圖 4-15 IME 於 20%資料遺失率補償之實驗結果... 53 圖 4-16 One-delay 於 40%資料遺失率補償之實驗結果 ... 53 圖 4-17 IME 於 40%資料遺失率補償之實驗結果... 54 圖 4-18 IME_2 於 40%資料遺失率補償之實驗結果... 55 圖 4-19 IME_3 於 40%資料遺失率補償之實驗結果... 56 圖 5-1 預測控制器設計概念示意圖 ... 59
ix 圖 5-2 資料預測控制器示意圖 ... 60 圖 5-3 系統鑑別的輸入(a)與輸出(b) ... 70 圖 5-4 資料預測控制器設計於控制系統響應圖 ... 71 圖 5-5 資料預測控制器設計於不同系統與不同命令之模擬結果 (a)受控體轉移 函數為6𝑠 + 6 (b)受控體轉移函數為1𝑠2 + 5𝑠 + 4 ... 72 圖 5-6 資料預測控制器不同 Q 值設計的模擬結果(a)Q=10 (b)Q=1000 (c)Q=1012 ... 73 圖 5-7 DPC 應用於網路控制系統補償策略圖 ... 74 圖 5-8 DPC 應用於封包遺失補償模擬圖(40%資料遺失率) ... 74 圖 5-9 DPC 應用於網路控制系統補償架構圖 ... 75 圖 5-10:不同資料遺失率下兩種補償方式的弦波追跡誤差(a)(b)(c)DPC (d)(e)(f)IME ... 76 圖 5-11 方波輸入訊號 ... 77 圖 5-12 三角波輸入訊號 ... 77 圖 5-13 不同資料遺失率下兩種補償方式的方波追跡誤差(a)(b)(c)DPC (d)(e)(f)IME ... 78 圖 5-14 不同資料遺失率下兩種補償方式的三角波追跡誤差(a)(b)(c)DPC (d)(e)(f)IME ... 79 圖 5-15 DPC 權重函數 Q=108時於不同資料遺失率下的補償響應圖(a)0% (b)30% (c)50% ... 82
圖 5-16 在受控體端加入 20% model 誤差情況下以 IME 補償資料遺失響應圖(a) 無資料遺失 (b)40%資料遺失率... 83
圖 5-17 在受控體端加入 20% model 誤差情況下以 DPC 補償資料遺失響應圖(a) 無資料遺失 (b)40%資料遺失率... 84 圖 5-18 在受控體端加入 10 倍增益的情況下以 IME 補償資料遺失響應圖(a)無
x 資料遺失 (b)40%資料遺失率... 85 圖 5-19 在受控體端加入 10 倍增益的情況下以 DPC 補償資料遺失響應圖(a)無資 料遺失 (b)40%資料遺失率... 86 圖 5-20 在受控體端加入 0.1 倍增益的情況下以 DPC 補償資料遺失步階響應圖(a) 無資料遺失 (b)40%資料遺失率... 87 圖 5-21 在受控體端加入 0.1 倍增益的情況下以 DPC 補償資料遺失弦波響應圖(a) 無資料遺失 (b)40%資料遺失率... 88 圖 5-22 不同時間延遲下的 DPC 補償響應圖(a)無延遲 (b)50ms (c)200ms... 90 圖 5-23 IME 結合 DPC 應用於網路控制系統補償架構圖 ... 92 圖 5-24 IME_1D+DPC 與 one-delay 於 20%資料遺失率追跡誤差比較實驗圖 .... 93 圖 5-25 IME_1D+DPC 與 one-delay 於 40%資料遺失率追跡誤差比較實驗圖 .... 93 圖 5-26 IME+DPC 與 one-delay 於 40%資料遺失率追跡誤差比較實驗圖 ... 94 圖 5-27 IME+DPC 與 one-delay 於 20%資料遺失率追跡誤差比較模擬圖 ... 95 圖 5-28 IME+DPC 與 one-delay 於 40%資料遺失率追跡誤差比較模擬圖 ... 95 圖 5-29 IME+DPC 與 one-delay 於 60%資料遺失率追跡誤差比較模擬圖 ... 95 圖 6-1 時間延遲對於資料遺失的影響 ... 97 圖 6-2 DPC 與 IME 與 PDC 整合的系統架構圖 ... 98 圖 6-3 無資料遺失與時間延遲的追跡誤差 ... 99 圖 6-4 20%資料遺失率與 50ms 時間延遲下的追跡誤差圖(a)無補償 (b) IME+DPC+PDC 補償 ... 100 圖 6-5 IME+DPC+ PDC 架構於 20%資料遺失率與 50ms 時間延遲下的系統響應 圖... 101 圖 6-6 50%資料遺失率與 50ms 時間延遲下的追跡誤差圖 (a)無補償 (b) IME+DPC+ PDC 補償 ... 102 圖 6-7 IME+DPC+ PDC 架構於 50%資料遺失率與 50ms 時間延遲下的系統響應
xi 圖... 103 圖 6-8 20%資料遺失率與 50ms 時間延遲下的響應圖 (a)無補償 (b)IME+DPC+ PDC 補償 ... 104 圖 6-9 50%資料遺失率與 50ms 時間延遲下的響應圖 (a)無補償 (b)IME+DPC+ PDC 補償 ... 106 圖 6-10 one-delay+PDC 於資料遺失率 40%之遠端網路控制系統的追跡誤差圖 ... 107 圖 6-11 IME+DPC+ PDC 於資料遺失率 40%的遠端網路控制系統的追跡誤差圖 ... 107 圖 6-12 WiFi 與 Zigbee 共用頻帶示意圖 ... 108 圖 6-13 存在 WiFi 干擾的網路控制系統示意圖 ... 109 圖 6-14 300kb/s 流量的 WiFi 訊號干擾下網路控制系統之延遲時間 ... 110 圖 6-15 以 one-delay 估測器補償干擾因素的追跡誤差圖 ... 110 圖 6-16 以 IME+DPC 估測器補償干擾因素的追跡誤差圖 ... 111 圖 6-17 以 IME+DPC+ PDC 補償干擾因素的追跡誤差圖 ... 111 圖 6-18 於 30ms 取樣週期在 300kb/s 干擾下補償之追跡誤差圖(a)以 one-delay 補 償 (b)以 IME+DPC 架構補償 (c)以 IME+DPC+ PDC 架構補償 ... 113
i
表目錄
表 4.1 不同資料遺失補償架構之模擬結果比較... 56 表 4.2 不同資料遺失補償架構之實驗結果比較... 57 表 5.1 IME+DPC 與其他資料遺失補償架構之模擬結果比較 ... 96 表 5.2 IME+DPC 與其他資料遺失補償架構之實驗結果比較 ... 961
第一章
緒論
1.1
研究動機與目的
近年來將運算、通訊和控制單元,透過網路作整合,以方便系統的建立與管 理,進而提高系統的整合度與便利性,乃是控制系統的一大趨勢。也因為網路化 的日益普及化,各種應用於不同領域的網路協定也因應而生,常見於工業應用的 協定如:WorldFIP、Profibus、SERCOS、CAN 等;其他如 Ethernet、無線網路或 是感測器網路 Zigbee 等協定,也廣泛使用於各種應用上,特別是無線網路已是 未來網路通訊的發展重點。 利用網路做為運算、通訊和控制單元的媒介,可以在遙遠的距離內控制與監 控特定的系統,如果使用無線網路,更可以節省佈線的複雜度與成本,且具有高 機動性,所以網路控制系統具有節省配線、系統擴充性增加、減少安裝和維護成 本、方便監控等優點。但也有許多所要面臨的問題,首先便是網路傳輸所帶來的 影響(time delay)、網路引起的訊息傳遞延遲與訊息遺失(data dropout)、訊息排程、 節點間的時脈不同步。這些種種問題,任何一個均可能讓控制效能降低,甚至讓 受控體變成不可控的狀況,如何去克服網路傳輸所引起的問題並且發揮遠端網路 控制的優點,變成為研究的重點之一。 為了研究這些問題對網路控制系統的影響,本研究以時間觸發(time trigger) 作為網路封包傳輸依據,建立以 Zigbee 無線網路為通訊方式的網路控制系統, 針對馬達作位置控制實驗,分析探討網路層面對控制系統效能的影響。根據模擬 與實驗結果,資料遺失與時間延遲的存在會導致控制效能低落甚至造成系統不穩 定,因此本研究特別針對這兩方面提出了的解決辦法,並且結合控制器提出了 model-free 的控制架構,建立一套完善且可靠的網路控制系統。1.2
研究背景與發展概況
隨著網路的蓬勃發展,加上近年來最熱門的領域-無線網路的研究,讓許多2 學者與研究人員紛紛投入網路通訊這領域,讓網路概念的延伸與應用處處可見, 更可以將網路的概念應用在控制理論上,因此網路控制系統的想法便因應而生, 而針對網路控制系統所相關的研究課題與問題也紛紛提出[1]。一般網路控制系 統,雖然有網路化的優點,但往往需要犧牲一點控制效能,以下針對一些足以影 響控制系統效能的問題,整理後可歸類成下列幾項: 網路傳輸所造成的延遲(time delay) 一般的理想控制系統,訊號在傳輸時,其傳輸時所花費的時間極小,通常可 以忽略不計,但當控制系統利用網路做為傳輸介面時,由於網路先天上的頻寬限 制與網路通訊協定限制下,造成訊號有一段不可忽略的傳輸延遲時間[2,3]。所以 在系統的等效模型中,需加入一個時間延遲項,而此時間延遲會造成系統的 phase margin 下降,導致系統不穩定,現在在此方面,已有相關理論解決延遲時間對系 統造成的不良影響[4,5]。 網路引起的訊息遺失(data dropout) 網路在傳輸的過程中,有可能會發生封包遺失的情形,一般來說,大部分的 網路通訊協定都有防止與解決封包遺失的機制,通常是避免資料封包碰撞 (collision)以及封包遺失後等候節點再一次重傳,資料封包的遺失,會造成控制 系統的命令遺失,等候節點再一次重傳的時間會增加延遲時間,有人提出使用泰 勒展開法來估測遺失的命令,使得系統不會因為命令遺失而造成系統控制效果不 佳[6]。 訊息排程(network scheduling)
在網路排程方面,有人提出 adjustable priority scheme 的排程方法[7,8],藉 由累積 CAN 網路上訊息一段時間的傳輸狀況後,逐漸調整訊息優先權,經由此
3 方法改變網路的排成可以有效的提昇網路傳輸的效率。 節點間的時脈不同步(jitter) 在系統取樣週期較小的架構下,時脈漂移造成節點間的時脈不同步,將導致 大量的系統資料遺失量,由此可知,時脈同步對於網路系統是不可忽略的因素。 關於網路時脈同步的方式,可由系統架構、網路協定等層面解決[9],以系統架 構來說,可利用額外的硬體接線作為同步線路,以此作為節點執行的基準;在網 路協定層面,以 CAN bus 為例,透過同步物件的傳送,提供整體網路的基準時 脈。這兩類作法各有其優缺點,前者為獨立於原本網路架構之外的作法,可免除 網路傳輸的干擾,且經由硬體線路可達到極高的準確度,但正因為是獨立於網路 之外,所以必須在系統建構時加以考量,若要應用於已建立的系統之上,就必須 重新規劃系統架構;後者則是基於原先的網路協定所衍生的方式,主要優勢在於 可經由軟體規範達成而不需改變系統架構,所以,實做上的可行性較高且提高系 統維護的便利性,但由於是透過網路封包傳遞的方式,傳輸狀況的影響就無法忽 略,傳輸速率、延遲時間和封包碰撞等等因素,都可能影響其效果而必須納入考 量,以 CAN bus 為例,由於封包碰撞可由 CAN 的重傳機制避免,而將主要考 量放在傳輸延遲上,因此,賦予同步物件極高的網路優先權,降低傳輸的等待時 間,便於同步物件順利傳送,以達到較好的同步效果[10]。 取樣週期(sampling period) 在數位控制系統下,控制效能會隨著取樣週期變小而變好,但將網路加入控 制系統當中,取樣週期則不可以小於某個極限值,如果小於該極限值,反而控制 效能會下降[11],主要原因是因為當取樣週期變小的情況下,所要傳輸的資料量 變多,而當網路的頻寬不足以傳輸這些資料量時,便會造成網路塞車、負載量增 大,所需要傳輸的資料,必須等待網路允許通過,方可傳輸,造成傳輸時間延遲, 甚至資料損失,導致控制效能下降。有人提出利用動態調整取樣頻率的方法
4 [12,13],當網路負載大時,取樣週期下降,減少傳輸資料量,有人提出以動態調 整取樣頻率為基礎,其適應性控制器的設計[14]。 QoS(quality of service)[15] 此因素會直接影響到網路控制系統的控制效能,其特性主要受訊息傳輸延遲 時間、訊息遺失率、訊息來源的正確性所影響,並非一個可量化的參數。
1.3
問題描述
綜合上述各種網路影響控制系統效能的因素,本研究將針對以下三個重點問 題作討論 1. 在網路控制系統中,當網路傳輸延遲超過系統取樣週期時,會導致網 路資料封包遺失,系統相位落後以及系統不穩定等情形。 2. 資料封包的遺失,造成系統控制命令的遺失,系統沒有收到命令,導 致空白取樣,使得控制效能下降。 3. 網路控制系統中控制器的設計,資料遺失與時間延遲的補償方法,一 般皆為 model-based 的設計,而無法廣泛應用於不同的網路系中。1.4
研究方法
1. 在處理網路時間延遲的方面,以 perfect delay compensation (PDC)將網 路延遲時間對系統的影響化為單純的時間延遲,避免系統因網路延 遲影響而導致系統響應發散。
2. 在改善資料封包遺失造成控制命令遺失方面,使用 intelligent message estimator (IME)以及時量測的封包遺失機率配合不同的最小平方估測 器補償當前遺失的資料。
3. 對於 IME 可能造成系統不穩定的方面使用 data-based predictive controller (DPC),透過移動時域控制,即時計算最佳的控制訊號,並 以此 控制訊號作為 IME 補償切換機制的指標。
5 4. 提出 IME+DPC+PDC 的架構,同時解決網路資料遺失與時間延遲對 系統產生的影響。
1.5
論文架構
本論文共分七章,第一章旨在說明研究動機與目的、研究背景與發展概況回 顧、敘述所面臨的相關問題、本論文的研究方法、以及論文架構。第二章先對 CAN、Zigbee 與 Ethernet 等網路通訊協定加以說明,之後介紹擬真的網路模擬環 境 Truetime 以及實驗設備平台。第三章介紹時間延遲的影響,然後以完全延遲 補償架構(PDC)解決網路延遲對系統的影響。第四章介紹網路資料遺失的問題, 資料遺失的分布與網路訊息的狀態,以及訊息估測器的說明而最後以智慧型訊息 估測器(IME)解決資料遺失所帶來的問題。第五章介紹資料預測控制器(DPC), 實現 DPC 並將之應用於網路控制系統中,以及結合 IME 達到自動調整資料遺失 補償方法。第六章討論網路控制系統中資料遺失與時間延遲同時發生的情形,提 出以 DPC 結合 IME 與 PDC 的補償架構,並以實驗和模擬的方式驗證其可行性。 第七章則為本論文的結論以及未來的發展方向。6
第二章
實驗平台與模擬環境
2.1
CAN 網路協定
CAN 全名為 Controller Area Network,起源於 1980 年代後期,由德國 Robert Bosch 公司所制定的一種具有高度安全且支援即時分散式控制的通訊協定,最高 傳輸速度可達 1M bit per second(bps)。到 1990 年代其通訊協定逐漸成型,相 關的 IC 元件紛紛被推出,才被廣泛地應用於工業界。CAN 原先是應用在汽車電 子系統,用來連接汽車內防鎖死煞車系統(ABS)或是引擎控制與感測單元等的電 子元件,以簡化車內複雜的硬體配線;但由於 CAN 提供可靠快速的資料傳遞, 適合用在即時系統(real-time system)且價格低廉,因此,發展至今也被廣泛運用 在各類的控制系統上。目前 CAN 已成為國際標準規格(ISO11898),CAN 在場 域匯流排(field bus)的應用已有 Honeywell 的 SDS 及 Allen-Bradley 的 DeviceNet。 CAN 根據其傳輸協定,具有以下的特點: 資料訊息具有優先權(priority) 優先權的仲裁(arbitration)為非破壞性 保證延遲時間 彈性的架構 採用廣播的方式(multicast),並藉由傳輸的訊息做時序同步的動作 任一節點皆可主動發出訊息(multimaster) 未傳送成功的訊息會自動重新傳送 錯誤檢查 區分暫時性錯誤和永久性錯誤並且自動關閉有問題的節點
7
2.2
Zigbee 網路協定
IEEE 802.15.4/ZigBee 的命名,源自於蜜蜂在發現花粉時,展現如同 Zigzag (Z 字形)形狀的舞蹈,並與 Bee (蜜蜂),合成為 ZigBee,形象地表述了 ZigBee 產品 是像蜜蜂一樣小而敏捷;是一種相當先進新穎的短距離傳輸技術標準,由家用無 線通訊規格 HomeRF 聯盟中所分出來的技術,IEEE 802.15.4 所定義的低傳輸速 率之無線個人區域網路,是一種網路結構簡單且低價格的通訊網路,適合在電力 供應有限且只需簡單運算之應用的裝置中實現,其主要的特色在於低傳輸速率 (250 Kbps)、短距離傳輸(一般約為 50-100m,依耗電量的不同,可提升至 300m)、 可靠的資料傳輸、低耗電量、價格低廉及容易安裝。
IEEE 802.15.4 實體層(PHY)採用 Direct Sequence Spread Spectrum(DSSS) 技術,這 DSSS 技術主要的優點在於可以降低類比電路在開發上的複雜度與成本, 其傳輸速率介於 250kbps 至 20kbps 之間,看所用頻段而決定,頻段的使用分別 是 2.4GHz 的 ISM 頻段、美國開放的 915MHz 頻段,以及歐洲開放的 868MHz 頻段,而不同頻段可使用的通道分別是 16、10、1 個。圖 2-1 為 IEEE 802.15.4 操作頻帶示意圖。 圖 2-1 IEEE 802.15.4 操作頻帶示意圖
8
IEEE 802.15.4 的媒體存取層(MAC),定義了兩種傳輸協定,一種是同步模 式(Beacon Mode),另外一種則是非同步模式(Non-Beacon Mode)。
同步模式則是 IEEE 802.15.4 比較特別的規格,圖 2-2 為同步模式(Beacon Mode)資料傳送行為,利用信標的星型拓撲網路中,為於中心的父節點可以和 其從屬的多個子節點間進行資料交換,但是子節點和子節點間不能進行資料交 換。 圖 2-2 同步模式(Beacon Mode)資料傳送行為 非同步模式簡單來說就是直接使用 Unslotted CSMA-CA 協定,避免傳輸碰 撞。圖 2-3 為非同步模式(Non-Beacon Mode)資料傳送行為,本論文所使用的 資料傳輸方式為非同步模式。 圖 2-3 非同步模式(Non-Beacon Mode)資料傳送行為
9
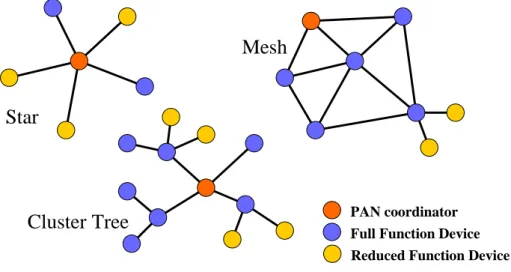
基於 IEEE 802.15.4 的規格,ZigBee Alliance 定義了網路層(NWK)、應用層 (AP)與安全層(security)。網路層最重要的工作,在於負責網路機制的建立與 管理,同時具有自我組態路由路徑(self configure),以及自我修復路由路徑(self healing)的功能。在網路層中,ZigBee 定義了三種角色,第一個是網路協調者 (WPAN coordinator),負責網路的建立以及網路位置的分配;第二個是路由器 (router),主要負責找尋、建立、以及修復資料封包路由路徑,並負責轉送資料封 包,同時也具有網路位置的分配的能力;最後一個是末端裝置,只能選擇加入別 人已經形成的網路,可以收送資料,但不能幫忙轉送封包。網路功能是 ZigBee 最重要的一個特點,也是與其他 WPAN 標準最不一樣的地方;以規格來說,網 路層以 16bits 的資料長度來管理網路位置,理想上在同一個 WPAN,可以存在 65536 個 ZigBee 裝置,彼此透過多重跳點(multi hop)的方式,傳遞資訊,圖 2-4 為 ZigBee 網路拓撲架構。為了在省電、複雜度、穩定性與實現難易度等因素取 得一個平衡點,網路層的路由演算法,使用了下列三種方式:
1. AODV 演算法:建立隨易網路的拓樸架構,在 ZigBee 規格中稱為 Table Routing。
2. Motorola Cluster-tree 演算法:建立樹狀的拓樸架構,在 ZigBee 規格中 稱為 Tree Routing。
10
PAN coordinator Full Function Device Reduced Function Device
Star
Mesh
Cluster Tree
圖 2-4 ZigBee 網路拓撲架構
本論文採用英商 Jennic 公司所研發的 JN5121 wireless microcontroller 做為控 制介面,是世界上第一顆整合 RF 與 MCU 之 SOC 架構的低功耗 802.15.4 / ZigBee 晶片,如圖 2-5 所示。以下分別針對微控制器的周邊介面與 ZigBee 無線通訊作 介紹。 圖 2-5 Jennic JN5121 微控制器 JN5121 微控制器擁有 16 MHz 的處理能力,其核心採用 32 位元定點運算, 記憶體容量方面,JN5121 擁有 64K ROM 與 96K RAM,且提供豐富的周邊擴充 介面(圖 2-6),如下所示: 兩組 UARTs
11 兩組可程式化 Timer/Counters
兩組可程式化 Sleep Timers 與一組 Tick Timer 兩組串列介面 (與 SMBus 及 I2
C 相容) Slave SPI port (與 digital I/O 共用)
21 個數位 I/O lines (與 UARTs, timers 以及 SPI 共用) 四組 12-bit, 100Kbps 類比/數位轉換器 兩組 11-bit 數位/類比轉換器 可程式化比較器 圖 2-6 JN5121 周邊介面
2.3
乙太網路(Ethernet)協定
乙太網路(Ethernet)源自於 Xerox 公司的區域網路系統,一開始速度只有 2.49Mbps,僅在 Xerox 公司內部使用,隨後由 DEC、Intel 和 Xerox 三家公司共 同參與標準之改進與擴展,並且發表了 Ethernet Version 2(EV2)規格,將網路頻 寬提升到 10Mbps,之後由 IEEE 根據 EV2 的內容,在 1983 年通過了 802.3 CSMA/CD 規格,從此成為使用最廣泛的區域網路標準之一。12 面的資料,在 CSMA/CD 裡,某一站要送資料前必須檢查是否別有別的站正在傳 送資料,假如沒有其他站要傳送資料,則這一監聽站就可以將資料傳送到網路上 面。在乙太網路上面可能會遇到多站同時要傳遞資料的情況,此情況會造成資料 的碰撞。因此所有的站必須持續監聽網路及偵測出任何可能的碰撞。若產生碰撞, 所有站放棄所接收到的資料,原先傳送的各站退後等待一段時間再重送。為了降 低再次碰撞的可能,每個傳送站各自產生一個亂數來決定要等待多久時間才能傳 送。 乙太網路在實際使用上可以為匯流排或是星形方式連接,所有乙太網路的組 態在邏輯上是一種匯流排。每個訊框(Frame)可傳送資料到網路線上的各站,但 只有被定址到的那個站才能讀到訊框。在實現上目前使用最多的實現方式為 10BASE-T(雙絞線乙太網路),10BASE-T 是使用星形方式連接各站,速度為 10Mbps,最長傳輸距離為 100 公尺。除了 10BASE-T 之外,還有 10BASE5(粗纜 乙太網路)和 10BASE2(細纜乙太網路),上述兩種均使用匯流排傳輸方式做連 接。 目前使用上比較普遍的是快速乙太網路(Fast Ethernet),快速乙太網路是比乙 太網路更新一點的版本,最高速率為 100Mbps 跟乙太網路比較起來,在訊框上 沒有做任何改變,唯一改變的是傳輸速度和碰碰撞區間的大小,傳輸速度提高 10 倍,因此碰撞區間也降低 10 倍。快速乙太網路和 10BASE-T 一樣採用星狀連 接 方 式 , 其 規 範 定 義 三 種 實 體 介 質 : 100BASE-T4 、 100BASE-XT 和 100BASE-XF。
至於 Gigabit 網路速度 1000 Mbps,就是 Gigabit Ethernet,只是 Gigabit Ethernet 的網路線就需要更加的精良。當傳輸速度增加時,線材的電磁效應相互 干擾會增強, 因此在網路線的製作時就得需要特別注意線材的質料以及內部線 蕊之間的纏繞情況配置等, 以使電子流之間的電磁干擾降到最小,才能使傳輸 速度提升到應有的 Gigabit 。因此現在高速網路的傳輸介質逐漸的被光纖所取
13 代。
2.3.1 TCP/IP 通訊協定
TCP/IP 主要是用來連結網路上的電腦主機,作為網路傳輸資料的標準協定, 是一套完整的通訊協定,他的名稱來自於其中兩個最重要的協定:傳輸控制協定 (transmission control protocol,TCP)及網際網路協定(internet protocol, IP),除了這 兩種協定外,TCP/IP 還包含了其他協定,但最重要的就是 TCP 和 IP 兩種協定。 TCP/IP 是一種階層式的協定,這裡所謂的階層式是指每一個較高的協定是 由一個或多個較低分層協定所支援。這裡主要介紹網路層的網際網路協定(IP)和 傳輸層的傳輸控制層協定(TCP)。 (a) 網際網路協定(IP) IP 是 TCP/IP 使用的傳輸機制,是一種非可靠性、非預接式的資料封包 協定,只提供盡量傳送的服務。所謂盡量傳送是指 IP 沒有提供錯誤檢查或 追蹤,IP 假設他的底層是不可靠的而盡力將資料傳送到目的地,但不保證 是否傳到目的地。IP 以資料封包方式傳遞,而各個資料封包分別傳送,資 料封包在傳輸過程可以經過不同的路徑,可以不按順序到達,也可以被重 複,當資料封包達目的時,也沒有方法將資料封包調整回原來的順序。然 而 IP 的限制不應被視為缺點,IP 提供骨幹傳輸的功能,且讓使用者自由加 入所需要的功能,因而獲得較高的效率。 (b) 傳輸控制協定(TCP) TCP 提供完整的傳輸服務給所需的應用程式,在應用層與網路層之間 提供應用程式和網路運作的中介服務。TCP 在傳輸層中提供了流量控制和 錯誤控制的機制,TCP 使用滑動窗口(sliding window)的協定來做流量控制, 使用回應封包、計時(time-out)、重送的機制來做錯誤控制。 TCP 為應用程式提供連線的機制,應用程式能夠以資料流方式傳送訊
14 息給傳輸層,在傳送端的傳輸層負責與接收者建立一個連線後,將資料拆 成可傳送的單元並給予序號,再將傳送單元一個一個傳送出去。接收端的 傳輸層等待這些資料的到來,然後加以檢查,並將沒有錯誤的資料以資料 流的方式傳給接收端的應用程式,等全部資料完成後,TCP 要關掉剛剛使 用的連線。TCP 是一種連線導向,具可靠的傳輸協定。TCP 把 IP 的服務加 入連接導向及可靠性這兩種特點。
2.4
Truetime 模擬環境
Truetime 是基於 Matlab/Simulink 環境開發而成的模擬程式,能夠用來設計 擁有 real-time kernel、網路傳輸、動態受控體等要素的網路控制系統。Truetime 由六個 Simulink 區塊建構而成,並且定義了一系列的 Matlab 函數可供使用者運 用。其中包括了創建任務(task)、中斷處置、流程監視、與計時等設定模擬環境 的函數,以及在程式執行時能改變參數、網路資訊傳輸、數位類比轉換等即使處 理訊息的函數。2.4.1 Truetime Kernel 區塊
在 Truetime 中最主要的 Simulink 區塊為 Truetime Kernel 區塊。它能夠模擬 CPU 中 real-time kernel 的工作行為。Truetime Kernel 區塊執行使用者定義的任 務或是中斷處理,而這些任務或中斷可能是週期性的,也有可能是即時觸發的。 例如以時間驅動的週期性網路通訊,或者使用者臨時改變的 I/O 輸入。這些任務 的程式以 Matlab 的 m-file 寫成,程式碼會被進一步分解為片段的程式,如圖 2-7 的方式執行。所有的程式被執行後會等待一段時間,這段時間為模擬執行的時間, 一直到等待結束,才會繼續進入下一段程式。
15 圖 2-7 Truetime Kernel 以分割片段方式執行使用者定義程式碼
2.4.2 Truetime 無線網路區塊
Truetime 中的無線網路區塊能夠模擬區域網路中的介質存取和封包傳輸的 行為。當網路中有節點想要傳送資料時,觸發信號會被送到 Truetime 無線網路 區塊,模擬封包傳送,結束後再傳送觸發信號到對應的 Truetime Kernal 區塊,如 圖 2-8 所示。 圖 2-8 Truetime 模擬封包傳輸示意圖 傳輸結束後,被發送的訊息會被排入接收端的佇列裡,等待執行。在 Truetime 傳輸模型中,考慮到了無線電訊號衰減的問題,因此可以設定節點的位置,在模 擬中呈現距離遠近所造成的影響。初版的 Truetime 實作兩個無線網路協議: 802.11b/g (WLAN) 和 802.15.4 (ZigBee)16 在無線電訊號的模擬中考量到下面的因素: • 全向性的天線 • 接收和發送不能同時進行 • 訊號衰減模型為1 𝑑𝑎,其中 d 代表距離(m)、a 代表環境因子 • 來自其他節點的干擾 無線網路的參數透過下圖 2-9 的對話欄設定. 圖 2-9 Truetime 無線網路區塊對話框
17
2.4.3 802.15.4 (ZigBee)
Zigbee 的傳輸設備中包含了感測器和處理器,多個裝置之間能夠形成一個簡 單的網路系統。其網路協議設計為低速、低功耗的用途。Zigbee 的介質存取層是 基於 802.11b/g 的 CSMA/CA,在 Truetime 中以下面的演算法實現。 1. Initialize: NB=0 BE=macMinBE2. Delay for a random number of backoff periods in the interval [0, 2BE − 1] 3. Is the medium idle?
if yes: send else: goto 4
4. Update the backoff counters: NB=NB+1
BE=min(BE+1, aMaxBE) 5. Is NB>macMaxCSMABackoffs?
if yes: drop the packet else: goto 2 NB Backoff 次數 BE Backoff 階數 macMinBE CSMA/CA 演算法中 BE 的最小值。預設為 3。 在封包傳送的模擬中,若傳送封包的訊號強度大於接收端所能收到最低能量 的門檻值,則封包傳送成功,與此同時,Truetime 會考慮目前的背景雜訊計算出 訊號雜訊比(SNR)用來求取區塊錯誤率(BLER)。將 BLER 與封包大小納入考量,
18 可以得知封包裡位元的錯誤率,假如錯誤率低於某個臨界值,則封包的內容能夠 被完整地重建。 假使想傳送一筆訊息到接收端節點,而目前有其他的節點在接收端節點的範 圍內傳輸資料,且這些訊息的訊號強度(SNR)皆低於我們傳送的訊息,則除了我 們送出的封包外這些訊息都視為碰撞。值得注意的是,發送端的節點並不知道它 送出封包因為碰撞而遺失了,因此在介質存取層使用 ACK(acknowledge)機制是 必須的。而且從發送端的觀點來看,無論訊息是以遭受碰撞的方式遺失或是以其 他任何形式的遺失,都沒有差別。因此只要在一定的時間內(ACK timeout)沒有收 到 ACK,則訊息會重新傳送,一直到重新傳送的次數達到上限(Retry limit )。
2.4.4 網路控制系統模擬環境介面
圖 2-10 Truetime 模擬網路控制系統介面圖 2-10 為在 Truetime 環境下開發的網路控制系統模擬介面,regulator node 透 過 Truetime wireless network 將 網 路 訊 息 傳 送 給 sensor/actuator node ,
19
sensor/actuator node 接 收 到 資 料 後 將 命 令 透 過 控 制 器 送 入 受 控 體 , 同 時 sensor/actuator node 抓取受控體的響應再經由 Truetime wireless network 傳回給 regulator node。其中受控體轉移函數如式子(2.1)所示,PI 控制器的 Kp = 4.9074, Ki = 28.9857,取樣週期 50ms。 G(s) = 6 𝑠+6 (2.1)
2.5
網路控制系統實驗平台架構
圖 2-11 網路控制實驗架構 圖 2-11 為本研究實驗的系統架構圖,此架構由三個部份所組成,第一個部 份為 TI 的 F2812 DSP 和 Panasonic AC 伺服馬達所組成,馬達工作模式調整為速 度模式,第二部份為一台電腦和 USB CAN 所組成的 Server 端,Server 端是連結 CAN 網路和 Zigbee 網路的溝通橋樑,具有閘道器的功用,並且具有簡單的管理 功能,第三部份為負責網路控制的電腦。DSP 跟 Server 端的 USBCAN 之間的聯 繫是透過 CAN 來聯結,Server 端和負責遠端控制的 Client 端中間透過 Zigbee 網 路來聯結,整個控制迴路為位置迴路控制,在 DSP 端 PI 控制器被寫入 TI TMS320F2812 DSP 裡,其中 Kp = 0.0002, Ki = 0.0000001,馬達轉移函數如式 子(2.2),取樣時間為 50ms。 0 . 1 3 0 8 z 0 . 1 3 5 7- 0 . 1 8 5 2 z+ 1 . 1 8 z -z 8 . 7 8 8 z -1 4 . 9 9 z 5 . 2 7 7 z ) ( 4 3 2 2 3 z G (2.2)20
圖 2-12DSP 端實驗平台圖
當有資料要從 DSP 傳送到 Client 的控制端時,首先須要將訊息種類(Type) 及傳送資料(Data)的訊息格式設定好,設定好訊息格式之後將他放到 CAN 封包 的 Data 部份透過 CAN 網路傳到 Server。當 Server 接收到 CAN 送過來的封包之 後,將 CAN 封包的 Data 部分解析出來,然後透過 Zigbee 以 Zigbee 網路傳送到 Client 端。Client 端收到由 Zigbee 網路送過來的封包後,分析資料格式,確認訊 息的種類及訊息的數值,即完成 DSP 傳送資料到 Client 端的工作。
若要將資料由 Client 控制端傳送到 DSP,先將要傳送的訊息種類(Type)和傳 送資料(Data)訊息格式設定好,放到 Zigbee 封包中,以 Zigbee 網路傳送給 Server, Server 將封包解析過後取出使用者定義的部分放入 CAN 的封包裡,以 CAN 網路 將封包傳送到 DSP,即完成從 Client 端將控制命令傳送訊息到 DSP 的動作。
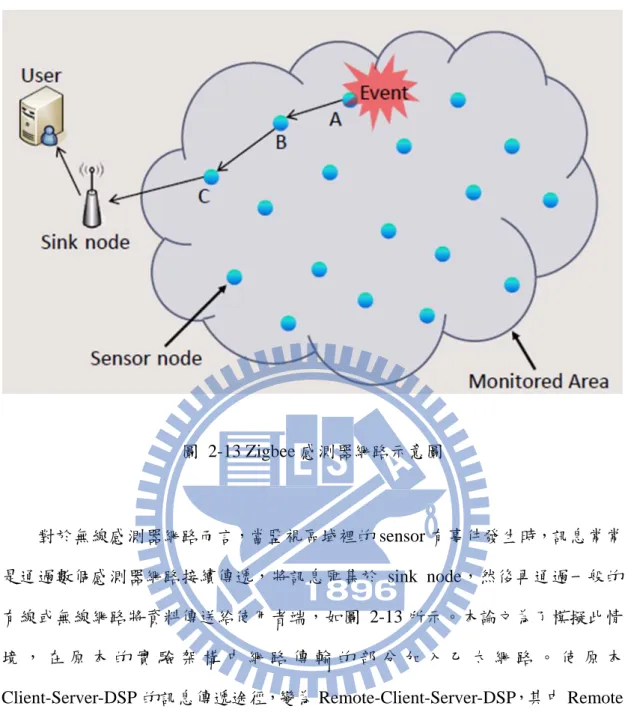
21 圖 2-13 Zigbee 感測器網路示意圖 對於無線感測器網路而言,當監視區域裡的 sensor 有事件發生時,訊息常常 是通過數個感測器網路接續傳遞,將訊息匯集於 sink node,然後再通過一般的 有線或無線網路將資料傳送給使用者端,如圖 2-13 所示。本論文為了模擬此情 境 , 在 原 本 的 實 驗 架 構 中 網 路 傳 輸 的 部 分 加 入 乙 太 網 路 。 使 原 本 Client-Server-DSP 的訊息傳遞途徑,變為 Remote-Client-Server-DSP,其中 Remote 和 Client 之間使用乙太網路傳輸,Client 和 Server 之間使用 Zigbee 網路傳輸,如 圖 2-14 所示。而其中 Zigbee 網路與乙太網路訊息交換的方式與上面提到的 Zigbee 網路和 CANBUS 訊息交換方式相同,因此不再多加贅述。
22
第三章
時間延遲討論
3.1
時間延遲的影響
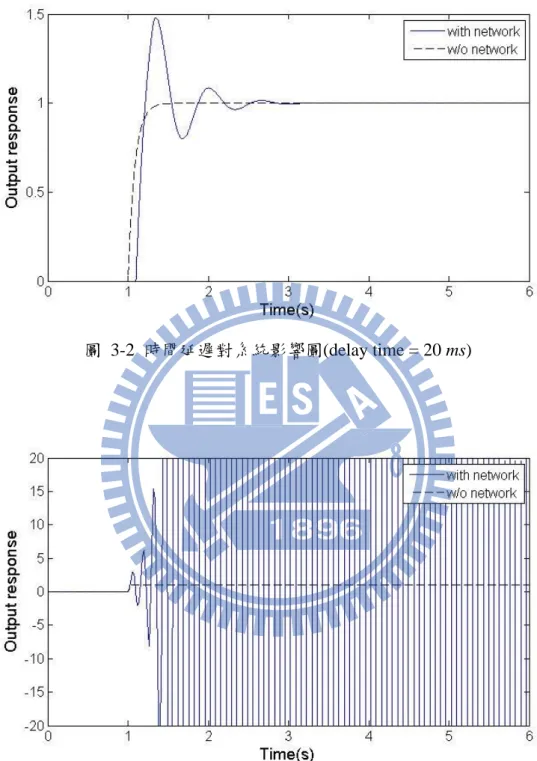
圖 3-1 網路控制系統方塊圖 圖 3-1 為一般網路控制系統方塊圖,在控制端與受控端之間的命令和回授訊 號是透過網路來傳輸,而由網路來當作傳輸媒介就會產生延遲時間(delay time)。 網路系統所產生的時間延遲分成兩類,一種為命令時間延遲(command time delay) 是由控制端將命令傳到受控端所產生的延遲時間,另外一種則是回授時間延遲 ( feedback time delay) ,回授時間延遲是指受控端將感測器的資料傳回控制端所 產生的時間延遲。 延遲時間若小於系統的取樣週期,則我們可以將延遲時間忽略掉,但是當延 遲時間大於取樣週期時,延遲時間對整個控制系統的影響,輕則會降低系統的效 能,嚴重則會造成整個控制系統的不穩定。基於式子(2.1)的網路控制系統,圖 3-2 和圖 3-3 分別為模擬的網路控制系統在取樣週期為 20ms 時的響應圖,這兩張圖 中虛線部份是不經過網路控制的系統響應圖,而實線部份則是經過網路控制的響 應圖,圖 3-2 的延遲時間為 20 ms,此時響應圖與未受網路控制做比較,可以看 出因延遲時間造成的系統震盪,若再將時間延遲加大到 100 ms,整個網路控制23 系統已經發散不受控制。
圖 3-2 時間延遲對系統影響圖(delay time = 20 ms)
24
3.2
時間延遲之量測與產生
3.2.1 Zigbee 網路的時間延遲
以圖 2-11 的方式實現以 Zigbee 與 CAN 網路傳輸的網路控制系統,當取樣 頻率為 20ms 時,實驗結果如圖 3-4 所示,原本的控制效能因為 Zigbee 網路的存 在而受到了影響。 圖 3-4 取樣頻率為 20ms 時 Zigbee 網路控制系統響應圖 為了測量 Zigbee 網路的延遲時間,在這邊以兩個 Zigbee 裝置互相傳送封包, 並記錄時間。實驗方式為,第一個 Zigbee 傳送封包給第二個 Zigbee,當第二個 Zigbee 收到封包後立即回傳,第一個 Zigbee 記下總經過時間。實驗 200 次紀錄 結果後計算其平均時間為 34.1687(ms),也就是說 Zigbee 網路每傳送一次封包平 均需要花費 34 毫秒的時間。 因為 Zigbee 網路的傳輸時間為 34 毫秒,大於系統的取樣週期因而導致系統 響應變差,因此更改系統取樣週期則可以改善此現象。若將系統取樣週期更改為 50ms,此時可得到結果如圖 3-5 所示,將 20ms 取樣週期時過大的振幅以及震盪25 現象消除了。 圖 3-5 取樣頻率為 50ms 時 Zigbee 網路控制系統響應圖
3.2.2 網路系統時間延遲量測
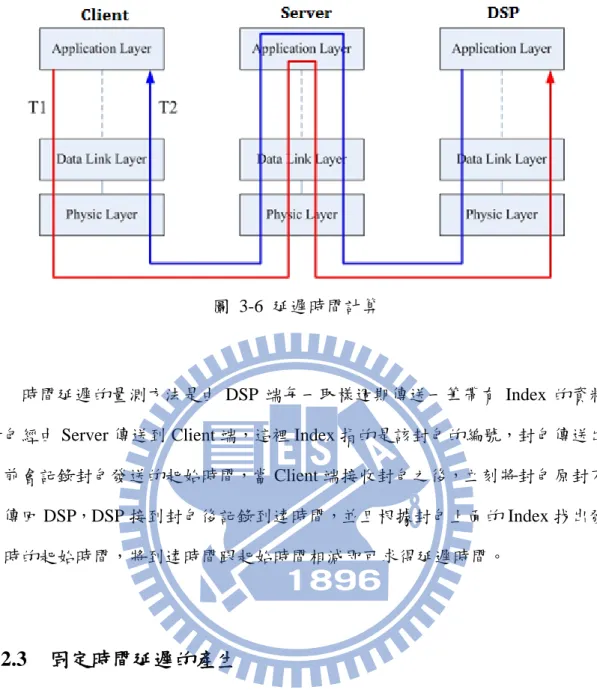
為了探討時間延遲對於網路控制系統的影響,必須先取得整個網路的延遲時 間,此網路延遲時間是指圖 3-1 中 T1與 T2時間的總和,T1為命令延遲時間,T2 為回授延遲時間。其中 T1和 T2延遲時間為每個節點的應用層到另外一邊應用層 加起來的總和,而不是單純指硬體層對硬體層之間的傳輸時間,如圖 3-6 所示。26
圖 3-6 延遲時間計算
時間延遲的量測方法是由 DSP 端每一取樣週期傳送一筆帶有 Index 的資料 封包經由 Server 傳送到 Client 端,這裡 Index 指的是該封包的編號,封包傳送出 去前會記錄封包發送的起始時間,當 Client 端接收封包之後,立刻將封包原封不 動傳回 DSP,DSP 接到封包後記錄到達時間,並且根據封包上面的 Index 找出發 送時的起始時間,將到達時間跟起始時間相減即可求得延遲時間。
3.2.3 固定時間延遲的產生
若想分析較長的時間延遲會對系統造成什麼影響,或想測試設計的控制架構 在長時間延遲情況下的效能,一個方法是將 DSP 端與 Client 端分別放置在相隔 遙遠的兩地,將網路傳輸的實體線路拉長,中間可能經過多個 Hub,使網路實際 傳輸的時間拉大。另外一個方式可以在命令端或是回授端建立一個 Buffer 如圖 3-7 所示,當有回授訊號要傳回 Remote 端時,回授訊號會先進入 Buffer,然後每 隔一次取樣週期位移一個位置,直到離開 Buffer 之後 Remote 端的控制器才會取 得回授訊號,如此每筆回授訊號依序進入 Buffer 再出來,每筆訊息的延遲時間 會等量的增加,增加後的延遲時間和 Buffer 大小關係如下:27 d s Buffer new d
Size
T
T
T
_
(
1
)
( 3-1 )其中Td_new為延長過後的延遲時間,SizeBuffer為 Buffer 大小,T 為系統取樣週期,s
d
T 為原本網路的延遲時間。此方法不只可以造成較長的時間延遲,同時也能產
生固定的時間延遲,這對於分析時間延遲對於系統架構的引響,便利性相當大。
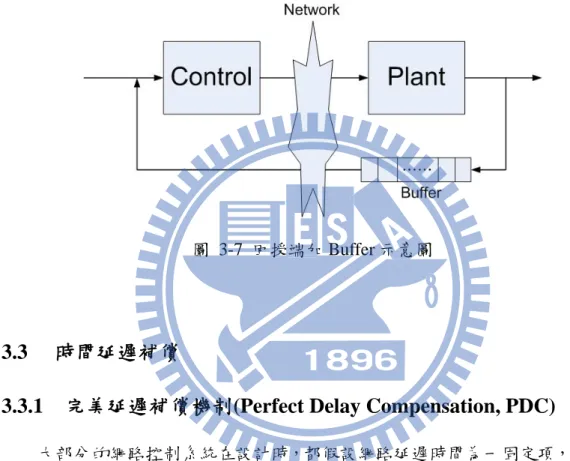
圖 3-7 回授端加 Buffer 示意圖
3.3
時間延遲補償
3.3.1 完美延遲補償機制(Perfect Delay Compensation, PDC)
大部分的網路控制系統在設計時,都假設網路延遲時間為一固定項,然而, 這種設計方法在現實情況下是不切實際的,因為網路產生的延遲會隨著時間有著 巨大的變動,而結果往往會造成系統相位的落差以及不穩定。為了解決這問題, 本研究使用了時間延遲完全補償機制 perfect delay compensation (PDC)來處理網 路的時間延遲。
圖 3-8 為 PDC 應用於一般網路控制系統的架構圖,以下將推導 PDC
28
圖 3-8 PDC 應用於網路控制系統
首先,從圖 3-8 得知,modified butter element 的輸出結果可以被表示成 ) ( ) ( ) ( ) (s U s G s Y s Up r c p ;Yr(s)Gc(s)Up(s)Yp(s) (3-1) 接著,Ur到Yr的轉移函數可以表示成為 ) ( ) ( 1 ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( s G s G s G s G s Y s G s U s Y s U s G U Y p c c p p c p p p c r r (3-2) 因為 ( ) ) ( ) ( s G s U s Y p p p ,故左側Uc到Yc的轉移函數可表示為
t t s c p c p c s t t c p c p c c c e s G s G s G s G s G e s G s G s G s G s G s U s Y ) ( ) ( 2 1 2 1 ) ( ) ( ) ( ) ( ) ( 1 ) ( ) ( ) ( ) ( ) ( 1 ) ( ) ( (3-3) 而系統的開迴路轉移函數可被表示為
1 ( ) ( )
2 ) ( ) ( ) ( ) ( ) ( 1 ) ( ) ( (1 2) s G s G e s G s G s G s G s G s R s Y p c s t t c p c p c c (3-4) 網路控制系統的閉迴路轉移函數則為29 s t o p c s t p c NCS G s e s G s G e s G s G s R s Y s G 1 1 ) ( ) ( ) ( 1 ) ( ) ( ) ( ) ( ) ( (3-5) 由(3-5)式得知,最後的結果原本無網路的閉迴路轉移函數與t1的延遲項相乘,Gc 為原本系統的控制器可以直接使用,不需要因為加入網路的關係而另外作修。而 回授延遲時間t2不影響輸出響應。
3.3.2 PDC 模擬結果
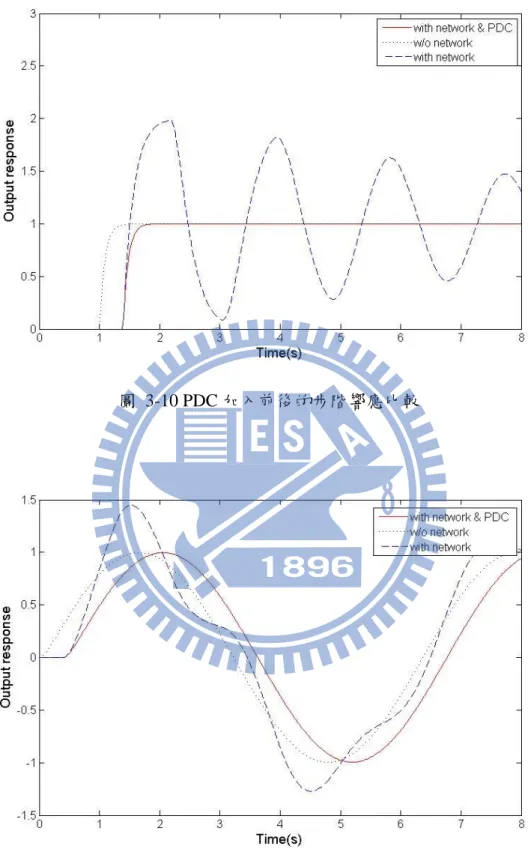
本節中將使用 Truetime 模擬環境建構出的網路控制系統來印證時間延遲補 償架構 PDC 的推導結果。在 Truetime 中建立如圖 2-11 的 Zigbee 網路控制系統, 受控體轉移函數為 𝑠 𝑠+6,取樣週期為 50ms,時間延遲為 250ms。如圖 3-9 所示, 在未加入 PDC 架構前系統響應會呈現震盪的現象。加入 PDC 架構後從模擬結果 可以看出原本震盪的現象已經消失,而系統響應變成單純的將控制時間延後,延 後的長度即為網路延遲時間的大小,如圖 3-10 與圖 3-11 所示。 圖 3-9 未加入 PDC 的系統響應30
圖 3-10 PDC 加入前後的步階響應比較
31
3.3.3 PDC 實驗結果
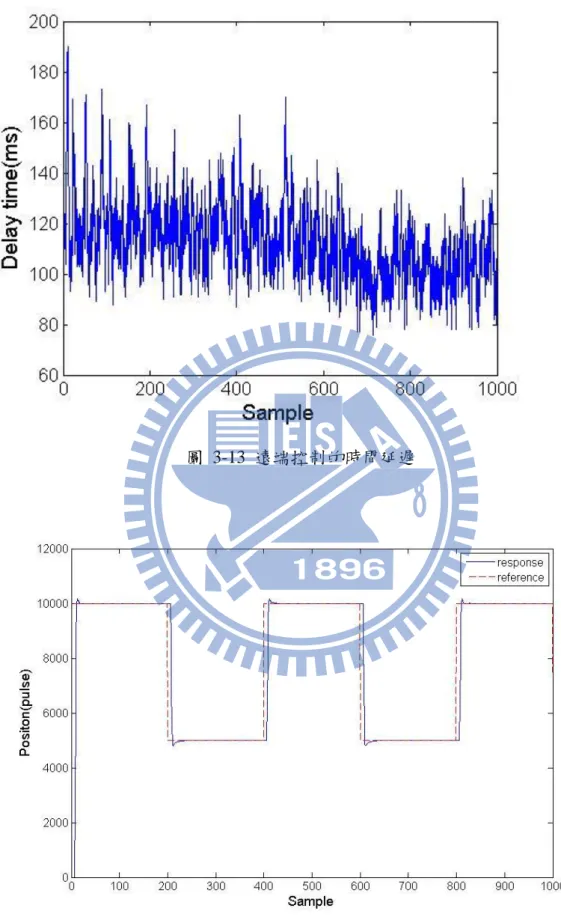
將 PDC 架構實現於如圖 2-14 所示的遠端網路控制系統中,在原本的 Zigbee 網路中加入 Ethernet。remote 節點在 5Km 外的距離透過 Ethernet 與 client 節點溝 通並且下達命令,client 節點再藉由 Zigbee 網路將資料傳給 DSP 端的 AC 伺服馬 達。因為經過了乙太網路,無可避免的時間延遲將會降低系統的穩定度與可靠度, 因此 PDC 架構會被實現且應用於此遠端網路控系統中。PI 控制器被寫入 TI TMS320F2812 DSP 裡,其中 Kp = 0.0002, Ki = 0.0000001,取樣時間為 50ms。 圖 3-13 為量測到的網路時間延遲,而基於式子(2.2)的伺服馬達網路控制系 統之實驗結果如圖 3-12 所示,網路控制系統的響應若是沒有 PDC 架構補償時會 產生劇烈的震盪。但是經過 PDC 架構補償後系統的控制效能可以得到相當理想 的改善,如圖 3-14。 圖 3-12 遠端網路控制系統響應
32
圖 3-13 遠端控制的時間延遲
33 不管在實驗中或模擬中,使用 PDC 價購時不需要鑑別系統模型,甚至不需 要知道網路延遲時間,就能夠將網路延遲時間對系統的影響轉變為單純的時間延 遲,相當的有效且方便。在本章裡無論是分析上或是實作中都證明了 PDC 架構 能成功有效的補償未知且變動的時間延遲,即使是對於遠端控制而言,透過 PDC 的補償,結果就如同直接在旁邊控制馬達般,將時間延遲的影響減至最低。
34
第四章
資料遺失討論
4.1
資料遺失介紹
一般的網路控制系統分為事件觸發(event-trigger)與時間觸發(time-trigger)兩 種模式。事件觸發(event-trigger)為根據數據封包的資料是否傳達做為系統觸發的 依據,在網路系統中,每個封包抵達的時間可能不盡相同,因此控制訊號的下達 時間並不是固定的,如圖 4-1(a)所示。事件觸發的優點是架構簡單、無須短時間 內多次傳送封包,能夠避免網路壅塞,此模式多數用在低精確度控制的領域上, 而其缺點為無法及時回授感測器資料,也無法及時下達控制命令,若應用於精密 控制的領域上時會有取樣點數不足,誤差過大,控制效能低落的問題。時間觸發 (time-trigger)為本研究採用觸發模式,控制命令與回授命令會在每一固定的取樣 週期內傳送,如圖 4-1(b)所示,相較於事件觸發,具有高取樣頻率且閉迴路即時 控制的優點。 圖 4-1 (a)事件觸發(event-trigger)示意圖 (b)時間觸發(time-trigger)示意圖 當命令訊號或回授訊號的傳輸無法滿足規定的時限時,則將此現象定義為資 料遺失(data dropout) ,如圖 4-2 所示。對於即時網路控制系統而言,若網路產 生的延遲時間大於系統的取樣週期時,就會發生資料遺失。除此之外,單就網路35 傳輸的部分來看,外界環境的干擾,封包之間彼此互相的碰撞等各種因素都會造 成資料遺失。因此,資料遺失在講求高速高精度的網路控制系統中是不可避免的, 同時也是設計網路控制系統的重要議題之一。 圖 4-2 資料遺失示意圖
4.2
即時轉移機率估測器
4.2.1 資料遺失分布的影響
對於控制系統而言,比起平均分布的資料遺失,連續性的資料遺失會造成更 為嚴重的控制誤差。圖 4-3(a)和(b)為兩個同為 20%資料遺失率應用於網路控制 系統上,模擬結果顯示,當資料遺失集中於某一部分的時候,控制效果會明顯的 下降,如圖 4-4 所示。這結果說明除了資料遺失本身以外,資料遺失的分布情形 同時會對控制系統造成很大的影響。36 (a)
(b)
37
(a) (b)
圖 4-4 追跡誤差於(a)分散式 (b)集中式資料遺失 (20%資料遺失率)
4.2.2 Two-state Markov Chain 網路模型
在網路控制系統傳輸封包的過程中,資料遺失可能為均勻分布或是集中於某 些時間點,而由上一小節的討論可知,集中式的資料遺失對於控制系統操作的影
38
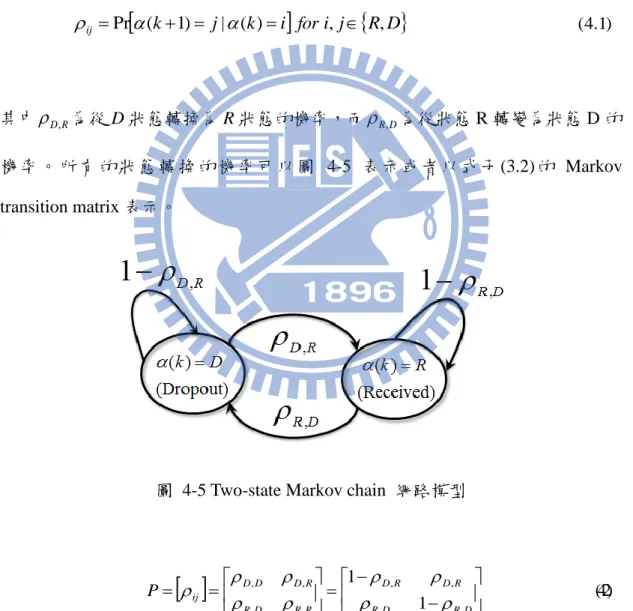
響特別劇烈。為了分析集中式的資料遺失,在這裡使用了 two-state Markov chain (Gilbert, 1960; Wang and Moayeri, 1995)。在 two-state Markov chain 中,系統未來 的狀態只與現在的狀態有關,與過去任何時間點的狀態皆無關,換句話說,系統 是無記憶性的(memoryless)。此模型中使用了兩個參數描述資料遺失的情況,D 表示資料遺失的狀態,R 表示資料未遺失的狀態。因此,在每一個取樣時間點資 料為遺失或是未遺失的機率
i,j可以寫為
k j k i
fori j
R D ij Pr( 1) |( ) , , (4.1) 其中
D,R為從 D 狀態轉換為 R 狀態的機率,而
R,D為從狀態 R 轉變為狀態 D 的 機 率 。所 有的 狀 態 轉換的 機 率可以 圖 4-5 表示或者以式子 (3.2) 的 Markov transition matrix 表示。圖 4-5 Two-state Markov chain 網路模型
D R D R R D R D R R D R R D D D ij P , , , , , , , , 1 1 (42.)39 階的狀態轉換 m
i j P , ,其中 ,ij Pr
( k)m| j( ) k
if o r,ij
R,D
) 3 . 4 ( 在本研究中,m 的值為 1。Markov transition matrix 也提供了系統平均行為的訊息,如果轉換矩陣裡所 有元素的值都是正的,則當k時,存在唯一的向量會使得
T k 0 P 。 向量在這裡同時代表 eigenvalue 為 1 的 eigenvector 以及所有元素值總合為 1 的機率向量。向量對於 Markov chain 的網路模型架構而言,描述了網路資料 平 均 的 接 收 和 遺 漏 (Leon, 1998) 。 舉 個 例 子 , 當 網 路 資 料 的 傳 輸 情 形 為
D,R,
R,D
(0.7,0.2),其對應的轉移矩陣為 8 . 0 2 . 0 7 . 0 3 . 0 P 其中
778 . 0 222 . 0 , 5 . 0 5 . 0 1 , 1 . 0 rs eigenvecto P eig T 對應於 eigenvalue 為 1 的 eigenvector 表示了在當時的情況下平均而言系統在狀態 R 佔據了 77.8%的時間,而狀態 D 佔據了 22.2%的時間。對於不同的網路情形以 及不同的網路參數產生的影響,Two-state Markov 模型的描述是非常便利且利於 圖形視覺化的。40 為了更進一步的探討網路參數的物理含意,可以將網路資料遺失情況表示為 網路參數的函數[Kawka 2006]。連續 D 狀態的期望值與連續 R 狀態的期望值可 以寫成下式 D D R D states D cons E , , 1 1 1 ) ( R R D R states R cons E , , 1 1 1 ) ( ) 4 . 4 (
4.2.3 即時轉移機率估測器(Transition Probability Estimator)
因為 two-state Markov chain 網路模型能夠清楚的表示網路參數的特性,轉移 機率(transition probability)的測量變得非常重要且有價值。然而,轉移機率由不可 預測的封包碰撞、網路流量負載和系統取樣頻率等種種因素形成的,因此測量轉 移機率相當的耗時且困難。先前的研究中可以成功測量轉移機率並建構 two-state Markov chain 網路模型的成果都必須耗費大量的時間和計算複雜度(Bertuccelli and How, 2008; Azimi et al., 2005; Azimi et al., 2003),而這在實際的應用中有著相 當大的限制。 網路控制系統需要快速且精確的控制,然而傳統的轉移機率著眼的目標為網 路整體的訊號,並不適合應用於即時的網路控制系統。因此在這邊提出即時的轉 移機率估測方式,對於控制系統估測區域性的即時轉移機率。 在即時的即時轉移機率估測器中,有兩點與傳統的轉移機率估測器不同。第 一為採用觀測框(observation window),觀測框的定義為當前時間點有限長度的前 幾 筆 資 料 。 舉 個 例 子 , 如 果 觀 測 框 的 長 度 為 五 , 則 在 時 間 點 k=10 時 , )] 9 ( ) 8 ( ) 7 ( ) 6 ( ) 5 ( [ OW(10) ,其中(k)為網路訊號。藉由觀測框的運 用,網路的特性可以被快速的分析。第二點不同的地方為重新定義ˆ kij( )
j k i
fori j
R D k j i ( ) PrPrOW(k) | ( ) , , ˆ, (4.5)41 在這個定義下,因為所有先前的網路訊號皆已知,因此可以有效的估測區域性的 轉移機率,
ˆi,j(k)。除此之外,如果觀測窗長度夠長的話,個別
ˆi,j(k)的平均更 可以有效的代表整體的轉移機率,
i,j. 將提出的局部 轉移機率 即時估測器分 別應用於兩個有相同 轉移機率 , 5 . 0 ,D D
的信號上,如圖 4-6 (a)和圖 4-6 (b)所示。雖然這兩個信號的D,D相同, 但是以局部的觀點來看,它們資料遺失的位置卻是完全不相同。對於這兩個信號 在第 15 個時間點估測的結果分別為
ˆD,D(15)0、
ˆD,D(15)60%。因此,局部 的轉移機率,
ˆi,j(k)比起傳統的
i,j更為精確的指示出網路控制系統中資料遺失 的分布情形。 (a)42 (b) 圖 4-6 在D,D 0.5的情況下即時計算局部的 transition probabilityˆD,D(k)
4.3
訊息估測與最小平方估測器
本研究是採用時間觸發作為封包傳輸的基準,對於網路控制系統而言,受控 端與控制端會因為網路的因素而不能即時接收資料,導致無法即時作出控制而使 輸出誤差上升。對於無法及時接收的命令,解決之辦法為: 1. 直接沿用前一筆資料(One-delay) 2. 使用估測器估測當下的數值 以估測法則來預估未能即時接收的資料是一種較為精確的方法,特別是針對 突然的少筆資料遺失,但在某些狀況,One-delay 仍有其好處,在下面會加以說 明。43 圖 4-7 不同估測方式的示意圖 圖 4-7 為不同估測方式的示意圖,若每一筆資料均可以透過網路即時地傳送, 則不需要估測,如同圖(a)所示。若沿用前一筆透過網路傳送的資料,是最為簡 單的方法來估測未能及時接收的資料,但從圖(b)可看出,會有估測誤差過大的 問題,此估測誤差會連帶影響輸出誤差,導致在網路延遲時間過長的情況下,會 有控制效能降低、甚至不穩定的問題產生。倘若利用估測法則來設計估測器,如: 泰勒估測(Taylor estimate)、最小平方估測(Least-square estimate)等,如圖(c)所示, 會降低估測誤差,得到較好的控制效能。 最小平方法是以多項式曲線的方式來估測,假設有 M 個已知數值,欲得到 第 M+1 個的數值,藉由前 M 筆已知數值與 N 次方多項式曲線來做逼近,該 N 次方多項式曲線與 M 個已知數值的平方距離為最小,則該 N 次方多項式曲線為 其他未知數值所估測出的集合,此為最小平方法的原理。以下為最小平方法的推 導過程: 對於一般的時間序列x[0],x[1],x[M],可以多項式適當的描述如下: N N k c k c k c c k x 2 2 1 0 ] [ (4.6) 因此
44 N N N N N M c M c M c c M x c c c c x c c c c x 2 2 1 0 2 2 1 0 2 1 0 ] [ 2 2 2 ] 2 [ ] 1 [ (4.7) 將 Eq. (4.7)重整如下 c A x c c c M M M M x x x N N N 1 0 0 0 2 2 2 1 1 1 ] [ ] 2 [ ] 1 [ (4.8) x A A A c( T )1 T (4.9) 因此,當前遺失的資料值可以被估測為
x N M LSE x A A A M M M c M M M M c M c M c c M x T T N N N N ) , ( ) ( ) 1 ( ) 1 ( ) 1 ( ) 1 ( ) 1 ( ) 1 ( ) 1 ( ) 1 ( ) 1 ( ] 1 [ 1 1 0 1 0 2 2 1 0 (4.10) 其中 M 代表欲計算的資料數目,N 代表欲逼近的多項式階數。 為了達到網路控制系統的即時線上估測,上述參數必須事先決定。然而,最 小平方估測器的階數和資料量長度必須根據實際情況決定。舉個例子,NURBS signal 可以被最小平方法近似為三階多項式(Sorenson, 1970)。因此,觀測框的長 度可以選擇五個資料量的長度來估測 NURBS 的曲線。為了避免費時的線上運算, 所有的 LSE 公式會被事先計算,以下即為三個為了實際應用而事先計算的45 ) , (M N LSE : 1 2 3 4 5 8 . 0 2 . 2 8 . 0 8 . 2 2 . 3 ) 3 , 5 ( z z z z z LSE (4.11) 1 2 3 3 3 ) 2 , 3 ( z z z LSE (4.12) 1 2 2 ) 1 , 2 ( z z LSE (4.13)
4.4
智慧型訊息估測器(Intelligent Message Estimator, IME)
為了測量在網路傳輸中遺失的訊息,one-delay 估測器簡單的採用最後收到 的訊息作為遺失訊息的補償,最小平方估測器從過去收到的資料估測現在的遺失 訊號,但若是過去的訊號也遺失的話,則從估測器獲得的訊息也會變得不可靠。 在本研究中,以智慧型訊息估測器(Intelligent Message Estimator, IME)基於不同階 數的最小平方估測器配合及時量測的 transition probability (