國 立 交 通 大 學
土木工程學系
碩士論文
背階圓柱尾流特性之試驗研究
Experimental Study on Wake of Circular Cylinder over
Backward-facing Step
研 究 生:魏紹唐
指導教授:葉克家 博士
背階圓柱尾流特性之試驗研究
Experimental Study on Wake of Circular Cylinder over
Backward-facing Step
研 究 生:魏紹唐 Student:Shao-Tang Wei 指導教授:葉克家 Advisor:Keh-Chia Yeh 國 立 交 通 大 學 土 木 工 程 學 系 碩 士 論 文 A ThesisSubmitted to Institute of Civil Engineering National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Civil Engineering
January 2012
Hsinchu, Taiwan, Republic of China
誌謝
本文承蒙恩師 葉教授克家兩年多來的細心指導,在試驗初期給予諸 多建議及構想,並即時糾正學生錯誤之觀念,使學生得以順利完成學業。 就讀研究所期間,恩師亦培養學生分析問題、解決問題之能力,給予學生 課業及研究上的指導,在日常生活中,恩師與師母亦給予學生許多關心與 照顧,僅此獻上最誠摯之謝忱。 文稿初成,承蒙國立成功大學蔡教授長泰、國立臺灣海洋大學趙教授 勝裕及國家高速網路與計算中心蔡副主任惠峰細心斧正與建議,使得本文 更加完整,僅此獻上最誠摯之謝忱。此外,衷心感謝趙教授提供本研究之 初步構想,給予影像分析與試驗上的指導,使學生受益良多。 這段時間內,非常感謝昇學學長、仲達學長與仁凱學長在研究上的指 導,亦讓我有機會跟著學長們實地勘查,使我對台灣的河川有更多的了解, 並在學長們的教導、提攜下,學習諸多數值模式,使我更加精進。感謝唯 泰、東洲、邱邱、家偉、婕玲、阿西哥、聖翔、卡哥、可樂、小皮、坤峰、 砲哥、敬衡、水利及海洋組全體同學、大學朋友們、信富、家榮、韋豪、 岱玲與學弟妹們,因為有了你們,我的生活才如此充實、快樂與豐富。 最後,衷心感謝一直陪伴著我、幫助著我的家人們,由於你們的照顧 與關心,使我才能繼續努力、往前邁進。 謹將此份榮耀與喜悅獻給各位師長、家人們、朋友們及所有同學們。I
背階圓柱尾流特性之試驗研究
學生:魏紹唐 指導教授:葉克家 國立交通大學土木工程研究所摘要
水流於橋墩基礎造成局部沖刷之現象,為台灣多數橋梁面臨之安全問 題,在工程上多以固床工、蛇籠等結構體穩固橋墩基礎,以確保橋梁安全。 無論是固床工或蛇籠,大部分皆以階梯型式存在於流場中,可視為圓柱與 階梯之組合,過去對於水流流經圓柱或階梯之相關研究甚多,但鮮少探討 兩者組合之流場特性。因此,本研究於圓柱底部設置一階梯,應用質點影 像測速法沿水深方向分層量測圓柱後方尾流之水平面流場,藉此探討圓柱 與階梯組合之流場特性。 量測結果顯示,圓柱正後方階梯流場中存在一逆向水流,往階梯方向 流動,因其流速較兩側階梯迴流區高,故形成以逆向水流為主之迴流運動; 此逆向水流向上發展影響圓柱尾流流場,使尾流中心軸上形成一低速區, 導致圓柱渦流向下游移動時,有往兩側偏移之現象。本研究亦分析圓柱渦 流脫離頻率與階梯高度、福祿數之關係,作為往後研究橋墩震動、局部沖 刷深度評估之參考。 關鍵詞:圓柱、尾流、背向階梯、渦流脫離頻率Experimental Study on Wake of Circular Cylinder over
Backward-facing Step
Student: Shao-Tang Wei Advisor: Keh-Chia Yeh Institute of Civil Engineering
National Chiao Tung University
Abstract
In Taiwan, one of the safety problems of many bridges is the local scour caused by flow passing around the bridge piers. Regarding engineering methods, groundsill works, gabions and other structures are usually used to protect the foundations of piers to ensure bridges safety. Because groundsill work or gabion is constructed on step, the structure can be regarded as the combination of circular cylinder and step. In the past, there were many researches about flow passing either circular cylinder or step, but few studies on the flow field of the combination of circular cylinder and step. Therefore, this experiment is conducted to study the flow field passing a circular cylinder located on a backward-facing step by using the particle image velocimetry to measure the horizontal flow fields at different layers of the wake generated by the circular cylinder.
The experimental result reveals an adverse flow zone occurs in the recirculation region of step behind the cylinder. In the adverse flow zone, fluids flow toward step and faster than those on both sides of the recirculation region. Therefore, the adverse flow will become the main flow of the recirculation region. The adverse flow zone affects the wake of the circular cylinder causing a field of low velocity existing in the middle of the wake. It also results in that vortices displace laterally when flowing downstream. Furthermore, the relationship among vortex shedding frequency, height of step, and Froude number is analyzed to provide the information for the future study about the vibration of the pier and the estimation of the local scour depth.
Keywords: circular cylinder, wake, backward-facing step, vortex shedding frequency
III
目錄
摘要 ... I Abstract ... II 目錄 ... III 表目錄 ... VI 圖目錄 ... VII 符號說明 ... XV 第一章、導論 ... 1 1.1 研究動機 ... 1 1.2 研究目的 ... 1 1.3 文獻回顧 ... 2 1.3.1 圓柱尾流相關研究 ... 2 1.3.2 背向階梯流場相關研究 ... 7 1.3.3 質點影像測速法 ... 11 1.4 研究方法 ... 12 1.5 本文組織 ... 13 第二章、試驗佈置規劃與分析方法 ... 14 2.1 試驗佈置規劃 ... 14 2.1.1 試驗儀器佈置 ... 14 2.1.2 因次分析 ... 182.1.3 試驗條件 ... 19 2.1.4 試驗步驟 ... 22 2.2 質點影像測速法之影像分析 ... 23 2.2.1 影像處理 ... 23 2.2.2 質點影像分析理論 ... 24 2.2.3 PIV 影像計算之誤差 ... 31 2.3 離散傅立葉轉換之頻率分析 ... 36 2.3.1 離散傅立葉轉換法 ... 36 2.3.2 離散傅立葉轉換法之分析及驗證 ... 37 第三章、試驗結果 ... 43 3.1 單一圓柱近域尾流流場量測結果... 43 3.2 單一背向階梯流場量測結果 ... 45 3.3 階梯與圓柱組合試驗 ... 46 3.3.1 階梯與圓柱組合試驗之圓柱尾流流場量測結果 ... 46 3.3.2 階梯與圓柱組合試驗之背向階梯流場量測結果 ... 47 第四章、結果分析與比較 ... 128 4.1 圓柱尾流擺動頻率之分析與比較... 128 4.2 圓柱與階梯組合試驗平均速度場之分析與比較 ... 137 4.3 綜合討論 ... 139
V
第五章、結論與建議 ... 160
5.1 結論 ... 160
5.2 建議 ... 162
表目錄
表 2-1 試驗案例表 ... 20 表 4-1 各試驗案例頻率分析結果 ... 130 表 4-2 各試驗案例無因次頻率分析結果 ... 131
VII
圖目錄
圖 1-1 圓柱周圍流場分佈圖 (Zdravkovich,1997) ... 3 圖 1-2 圓柱尾流分類示意圖 (Zdravkovich,1997) ... 3 圖 1-3 背向階梯流場分佈圖 ... 8 圖 2-1ARGONLASER ... 15 圖 2-2 反射鏡裝置 ... 15 圖 2-3 三維移動平台與透明圓柱棒 ... 16 圖 2-4FASTEC高速攝影機 ... 16 圖 2-5 蜂巢結構整流裝置 ... 16 圖 2-6 試驗水槽及相關佈置圖 ... 17 圖 2-7 試驗水槽流量率定曲線 ... 18 圖 2-8 坐標軸定義及量測範圍示意圖(俯視圖) ... 21 圖 2-9PIV 量測水平面位置示意圖 ... 22 圖 2-10 具時序性影像之質點亮度值分佈圖 ... 23 圖 2-11PIV 計算質問窗大小示意圖 ... 25 圖 2-12 互相關係數之最大值為有可能之位移量M與N示意圖 ... 25 圖 2-13 質問窗內子畫素修正法之互相關係數值示意圖 ... 28 圖 2-14 不一致流速向量圖(右下部份) ... 30 圖 2-15 去除不一致流速向量圖 ... 31圖 2-16RMS 誤差之示意圖 ... 32 圖 2-17 偏差誤差之示意圖 ... 33 圖 2-18 方均根誤差量 ... 34 圖 2-19 偏移誤差量 ... 34 圖 2-20 對 PIV 計算方法提供之標準圖 ... 35 圖 2-21 標準圖之 PIV 計算結果圖 ... 35 圖 2-22 於 288 畫素位置處之質點位移速度分佈圖 ... 36 圖 2-23 混疊現象示意圖 ... 37 圖 2-24 訊號 1 之曲線圖 ... 38 圖 2-25 訊號 2 之曲線圖 ... 39 圖 2-26 訊號 1 之能量頻譜曲線圖 ... 39 圖 2-27 訊號 2 之能量頻譜曲線圖 ... 39 圖 2-28 訊號 3 之曲線圖 ... 40 圖 2-29 訊號 4 之曲線圖 ... 41 圖 2-30 訊號 3 之能量頻譜曲線圖 ... 41 圖 2-31 訊號 4 之能量頻譜曲線圖 ... 41 圖 2-32 訊號 3 經修正後之能量頻譜曲線圖 ... 42 圖 2-33 訊號 4 經修正後之能量頻譜曲線 ... 42 圖 3-1 案例 C1 之 Z1(左)及 Z2(右)影像量測結果 ... 48
IX 圖 3-2 案例 C1 之 Z3(左)及 Z4(右)影像量測結果 ... 49 圖 3-3 案例 C2 之 Z1(左)及 Z2(右)影像量測結果 ... 50 圖 3-4 案例 C2 之 Z3(左)及 Z4(右)影像量測結果 ... 51 圖 3-5 案例 C3 之 Z1(左)及 Z2(右)影像量測結果 ... 52 圖 3-6 案例 C3 之 Z3(左)及 Z4(右)影像量測結果 ... 53 圖 3-7 案例 C1 之 Z1速度向量變化圖 ... 54 圖 3-8 案例 C1 之 Z1渦度場變化圖 ... 55 圖 3-9 案例 H11 之 Z5(左)及 Z6(右)影像量測結果 ... 56 圖 3-10 案例 H11 之 Z7(左)及 Z8(右)影像量測結果 ... 57 圖 3-11 案例 H11 之 Z9影像量測結果 ... 58 圖 3-12 案例 H12 之 Z5(左)及 Z6(右)影像量測結果 ... 59 圖 3-13 案例 H12 之 Z7(左)及 Z8(右)影像量測結果 ... 60 圖 3-14 案例 H12 之 Z9影像量測結果 ... 61 圖 3-15 案例 H13 之 Z5(左)及 Z6(右)影像量測結果 ... 62 圖 3-16 案例 H13 之 Z7(左)及 Z8(右)影像量測結果 ... 63 圖 3-17 案例 H13 之 Z9影像量測結果 ... 64 圖 3-18 案例 H21 之 Z5(左)及 Z6(右)影像量測結果 ... 65 圖 3-19 案例 H21 之 Z7(左)及 Z8(右)影像量測結果 ... 66 圖 3-20 案例 H21 之 Z9影像量測結果 ... 67
圖 3-21 案例 H22 之 Z5(左)及 Z6(右)影像量測結果 ... 68 圖 3-22 案例 H22 之 Z7(左)及 Z8(右)影像量測結果 ... 69 圖 3-23 案例 H22 之 Z9影像量測結果 ... 70 圖 3-24 案例 H23 之 Z5(左)及 Z6(右)影像量測結果 ... 71 圖 3-25 案例 H23 之 Z7(左)及 Z8(右)影像量測結果 ... 72 圖 3-26 案例 H23 之 Z9影像量測結果 ... 73 圖 3-27 案例 H31 之 Z5(左)及 Z6(右)影像量測結果 ... 74 圖 3-28 案例 H31 之 Z7(左)及 Z8(右)影像量測結果 ... 75 圖 3-29 案例 H31 之 Z9影像量測結果 ... 76 圖 3-30 案例 H32 之 Z5(左)及 Z6(右)影像量測結果 ... 77 圖 3-31 案例 H32 之 Z7(左)及 Z8(右)影像量測結果 ... 78 圖 3-32 案例 H32 之 Z9影像量測結果 ... 79 圖 3-33 案例 H33 之 Z5(左)及 Z6(右)影像量測結果 ... 80 圖 3-34 案例 H33 之 Z7(左)及 Z8(右)影像量測結果 ... 81 圖 3-35 案例 H33 之 Z9影像量測結果 ... 82 圖 3-36 案例 CH11 之 Z1(左)及 Z2(右)影像量測結果 ... 83 圖 3-37 案例 CH11 之 Z3(左)及 Z4(右)影像量測結果 ... 84 圖 3-38 案例 CH12 之 Z1(左)及 Z2(右)影像量測結果 ... 85 圖 3-39 案例 CH12 之 Z3(左)及 Z4(右)影像量測結果 ... 86
XI 圖 3-40 案例 CH13 之 Z1(左)及 Z2(右)影像量測結果 ... 87 圖 3-41 案例 CH13 之 Z3(左)及 Z4(右)影像量測結果 ... 88 圖 3-42 案例 CH21 之 Z1(左)及 Z2(右)影像量測結果 ... 89 圖 3-43 案例 CH21 之 Z3(左)及 Z4(右)影像量測結果 ... 90 圖 3-44 案例 CH22 之 Z1(左)及 Z2(右)影像量測結果 ... 91 圖 3-45 案例 CH22 之 Z3(左)及 Z4(右)影像量測結果 ... 92 圖 3-46 案例 CH23 之 Z1(左)及 Z2(右)影像量測結果 ... 93 圖 3-47 案例 CH23 之 Z3(左)及 Z4(右)影像量測結果 ... 94 圖 3-48 案例 CH31 之 Z1(左)及 Z2(右)影像量測結果 ... 95 圖 3-49 案例 CH31 之 Z3(左)及 Z4(右)影像量測結果 ... 96 圖 3-50 案例 CH32 之 Z1(左)及 Z2(右)影像量測結果 ... 97 圖 3-51 案例 CH32 之 Z3(左)及 Z4(右)影像量測結果 ... 98 圖 3-52 案例 CH33 之 Z1(左)及 Z2(右)影像量測結果 ... 99 圖 3-53 案例 CH33 之 Z3(左)及 Z4(右)影像量測結果 ... 100 圖 3-54 案例 CH11 之 Z5(左)及 Z6(右)影像量測結果 ... 101 圖 3-55 案例 CH11 之 Z7(左)及 Z8(右)影像量測結果 ... 102 圖 3-56 案例 CH11 之 Z9影像量測結果 ... 103 圖 3-57 案例 CH12 之 Z5(左)及 Z6(右)影像量測結果 ... 104 圖 3-58 案例 CH12 之 Z7(左)及 Z8(右)影像量測結果 ... 105
圖 3-59 案例 CH12 之 Z9影像量測結果 ... 106 圖 3-60 案例 CH13 之 Z5(左)及 Z6(右)影像量測結果 ... 107 圖 3-61 案例 CH13 之 Z7(左)及 Z8(右)影像量測結果 ... 108 圖 3-62 案例 CH13 之 Z9影像量測結果 ... 109 圖 3-63 案例 CH21 之 Z5(左)及 Z6(右)影像量測結果 ... 110 圖 3-64 案例 CH21 之 Z7(左)及 Z8(右)影像量測結果 ... 111 圖 3-65 案例 CH21 之 Z9影像量測結果 ... 112 圖 3-66 案例 CH22 之 Z5(左)及 Z6(右)影像量測結果 ... 113 圖 3-67 案例 CH22 之 Z7(左)及 Z8(右)影像量測結果 ... 114 圖 3-68 案例 CH22 之 Z9影像量測結果 ... 115 圖 3-69 案例 CH23 之 Z5(左)及 Z6(右)影像量測結果 ... 116 圖 3-70 案例 CH23 之 Z7(左)及 Z8(右)影像量測結果 ... 117 圖 3-71 案例 CH23 之 Z9影像量測結果 ... 118 圖 3-72 案例 CH31 之 Z5(左)及 Z6(右)影像量測結果 ... 119 圖 3-73 案例 CH31 之 Z7(左)及 Z8(右)影像量測結果 ... 120 圖 3-74 案例 CH31 之 Z9影像量測結果 ... 121 圖 3-75 案例 CH32 之 Z5(左)及 Z6(右)影像量測結果 ... 122 圖 3-76 案例 CH32 之 Z7(左)及 Z8(右)影像量測結果 ... 123 圖 3-77 案例 CH32 之 Z9影像量測結果 ... 124
XIII 圖 3-78 案例 CH33 之 Z5(左)及 Z6(右)影像量測結果 ... 125 圖 3-79 案例 CH33 之 Z7(左)及 Z8(右)影像量測結果 ... 126 圖 3-80 案例 CH33 之 Z9影像量測結果 ... 127 圖 4-1 案例 C1Z1之參考點U、V速度變化圖 ... 129 圖 4-2 案例 C1Z1 之參考點V速度之能量頻譜圖 ... 129 圖 4-3 無因次頻率參數 ST與雷諾數 RE之關係圖 ... 132 圖 4-4 單一圓柱試驗之無因次頻率分布圖 ... 133 圖 4-5 圓柱與階梯組合試驗(H/D=1.0)之無因次頻率分布圖 ... 134 圖 4-6 圓柱與階梯組合試驗(H/D=2.5)之無因次頻率分布圖 ... 134 圖 4-7 圓柱與階梯組合試驗(H/D=5.0)之無因次頻率分布圖 ... 135 圖 4-8 圓柱與階梯組合試驗(Z1)之無因次頻率分布圖 ... 135 圖 4-9 圓柱與階梯組合試驗(Z2)之無因次頻率分布圖 ... 136 圖 4-10 圓柱與階梯組合試驗(Z3)之無因次頻率分布圖 ... 136 圖 4-11 圓柱與階梯組合試驗(Z4)之無因次頻率分布圖 ... 137 圖 4-12 案例 C1 之圓柱尾流流場平均速度流線分布圖 ... 140 圖 4-13 案例 CH31 之圓柱尾流流場平均速度流線分布圖 ... 141 圖 4-14 案例 CH11 之圓柱尾流流場平均速度流線分布圖 ... 142 圖 4-15 案例 CH12 之圓柱尾流流場平均速度流線分布圖 ... 143 圖 4-16 案例 CH13 之圓柱尾流流場平均速度流線分布圖 ... 144
圖 4-17 案例 CH21 之圓柱尾流流場平均速度流線分布圖 ... 145 圖 4-18 案例 CH22 之圓柱尾流流場平均速度流線分布圖 ... 146 圖 4-19 案例 CH23 之圓柱尾流流場平均速度流線分布圖 ... 147 圖 4-20 案例 CH32 之圓柱尾流流場平均速度流線分布圖 ... 148 圖 4-21 案例 CH32 之圓柱尾流流場平均速度流線分布圖 ... 149 圖 4-22 案例 H31 之階梯流場平均速度流線分布圖 ... 150 圖 4-23 案例 CH31 之階梯流場平均速度流線分布圖 ... 151 圖 4-24 案例 CH11 之階梯流場平均速度流線分布圖 ... 152 圖 4-25 案例 CH12 之階梯流場平均速度流線分布圖 ... 153 圖 4-26 案例 CH13 之階梯流場平均速度流線分布圖 ... 154 圖 4-27 案例 CH21 之階梯流場平均速度流線分布圖 ... 155 圖 4-28 案例 CH22 之階梯流場平均速度流線分布圖 ... 156 圖 4-29 案例 CH23 之階梯流場平均速度流線分布圖 ... 157 圖 4-30 案例 CH32 之階梯流場平均速度流線分布圖 ... 158 圖 4-31 案例 CH33 之階梯流場平均速度流線分布圖 ... 159
XV
符號說明
B :渠道寬度 D :圓柱直徑 Fr :福祿數 g :重力加速度 h :上游平均水深 H :階梯高度 L :階梯長度 Q :流量 Re :雷諾數 S :底床坡度 St :史徹荷數 U0 :上游斷面平均流速 ρ :流體密度 μ :流體動力黏滯係數 Ω :渦度 ω :尾流擺盪頻率第一章、導論
1.1 研究動機 台灣天然河川坡陡流急,集水區降雨集中,使得河水流量大、流速快, 常於橋墩周圍產生局部沖刷,嚴重影響橋梁安全。針對此一問題,工程上 多採用固床工、蛇籠等保護工法以穩固橋墩基礎。而無論是蛇籠或固床工, 大部分皆以階梯型式存在於流場中,其與橋墩之組合可視為圓柱與階梯之 組合,過去對於圓柱或階梯流場之相關研究甚多,但鮮少探討兩者組合之 流場特性。因此,本研究將針對兩者組合之流場進行試驗研究,以了解兩 者組合之流場特性。 此外,對於流體與物體之間相互影響所產生之問題,如結構穩定、震 動、擾動、紊流與邊界層等亦是許多學者所關心的課題,其中橋墩之震動 頻率近年來為橋梁安全監測與評估之項目,而引致橋墩震動之因素與橋墩 後方渦流交替脫離(vortex shedding)現象有關。因此,本研究亦將探討當圓 柱後方存在一背向階梯流場時,圓柱渦流脫離頻率(shedding frequency)之變 化。 1.2 研究目的 無論是圓柱或階梯結構皆常見諸於許多工程應用上,其中也不乏兩者 之組合應用,而圓柱與階梯之組合流場係為一紊亂之三維流場,流況更為 複雜,過去鮮少探討其流場特性。因此,本研究將利用質點影像測速法2
(particle image velocimetry, PIV)量測圓柱近域尾流流場(wake)及階梯迴流流 場(recirculation region),經由影像分析獲得其瞬時速度場,藉此探討兩者組 合之流場特性,並利用頻譜分析探討不同階梯高度與圓柱渦流頻率之關係。 1.3 文獻回顧 1.3.1 圓柱尾流相關研究 圓柱體因擁有簡單之幾何構造,常見諸於許多工程應用上,如焚化爐 之煙囪、橋墩及海洋探勘平台之支柱等皆為圓柱體之應用,其相關研究眾 多,探討方向也不盡相同。對於流體流經圓柱之流場分佈,根據 Zdravkovich (1997)所著“Flow around Circular Cylinders”一書中,可將圓柱體周圍之流 場區分為(a)柱體前方之減速帶(retarded flow);(b)柱體表面之邊界層;(c)位 於柱體兩側之加速區以及(d)柱體後方之尾流流場四部份,如圖 1-1 所示, 因各部份流場特性不同,關注之現象也不盡相同,而對於圓柱尾流特性之 研究,主要係探討不同雷諾數下,圓柱尾流流場之速度、渦度場、壓力及 渦流脫離頻率等特性之變化。 對於尾流流場形態之研究,Zdravkovich (1997)整理前人之研究,將流 場 由 層 流 (laminar, L) 轉 變 為 紊 流 (turbulent, T) 之 過 程 中 , 依 照 漸 變 段 (transition, Tr)發生之位置分為三階段,並定義各階段雷諾數之範圍,其雷諾 數由低至高分別為漸變段發生於尾流(transition in wake, TrW)、漸變段發生 於剪力層(transition in shear layers, TrSL)及漸變段發生於邊界層(transition in
boundary layers, TrBL)三種流況,各階段再依照流場特性之差異如阻力係 數、迴流區長度等特性細分之,圖 1-2 為上述三種流況之示意圖。Bloor (1964) 針 對 漸 變段 發 生於 剪 力 層之 流 況進 行 研 究, 利 用熱 線 測 速儀 (hot-wire anemometer)量測圓柱尾流流場,發現隨著雷諾數之增加,漸變段會沿著剪 力層往分離點位置移動,並影響圓柱近域尾流之迴流區(eddy formation region)大小。 圖 1-1 圓柱周圍流場分佈圖 (Zdravkovich, 1997) 圖 1-2 圓柱尾流分類示意圖 (Zdravkovich, 1997)
4 過去對於圓柱尾流之渦流特性以及流場相似性之研究,多以可視化技 術觀測渦流形成與傳輸之過程及其渦流之形態,抑或用測速儀量測流速, 獲得尾流流場之速度分布,藉此探討圓柱尾流之渦流特性。Perry et al. (1982) 即是利用多種可視化技術觀測圓柱後方近域尾流流場之瞬時流線及煙線, 發現原本閉合之渦流產生分離的瞬間,流體會立即穿過兩個渦流間的狹窄 縫隙(alleyways),進而推動前方渦流向下游移動脫離圓柱迴流區,此外其結 果也顯示當觀察者以不同移動速度觀察流場時,其渦流形態亦不相同。Perry and Steiner (1987)、Steiner and Perry (1987)則進一步利用熱線測速儀及飛行 熱線(flying-hot-wire)技術對二維平板後方渦流之形成過程與遠域尾流之形 態進行探討,認為當觀察者以渦心速度移動時,所得到之渦流形態將會最 接近穩態。
Cantwell and Coles (1983)也利用熱線測速儀及飛行熱線技術探討圓柱 近域尾流相關結構(coherent structure)之相位變化及動量傳輸過程之特性,發 現擾動大部份集中於鞍點(saddle point)附近,認為近域尾流流場中渦流形成 之機制與鞍點有關。Hussain and Hayakawa (1987)則將 8 支 X 型熱線測速儀 置於圓柱尾流流場中進行同步量測,探討在圓柱後方 10、20、30 及 40 倍 圓柱直徑的下游斷面,渦流結構發展之過程,結果顯示隨著下游位置之增 加,渦流初始結構如渦流間距、橫向位移、強度及大小等特性將迅速消失。 Antonia et al. (1987)於研究中量測圓柱遠域尾流之渦流結構特性,並與近域
尾流相比較。Unal and Rockwell (1988)應用可視化技術對單一圓柱近域尾流 流場迴流區長度(formationn length)及迴流區特性進行探討,分析雷諾數與迴 流區長度之關係。Antonia et al. (2002)分別對實心圓柱、方柱、直立平板與 透水性圓柱、直立平板等五種鈍形體進行中心軸尾流流場渦度量測,並比 較不同形狀、透水與非透水之鈍形體尾流渦流變化特性,發現結構體差異 之影響主要反映在垂直水流方向之速度向量上。 Roshko (1954)在探討圓柱尾流形態時,發現雷諾數為 40 時,圓柱後方 渦流將開始脫離圓柱迴流區,圓柱尾流亦隨著渦流交替脫離產生週期性擺 盪,而當雷諾數增加至 150 到 300 之間,漸變段移動至尾流,使得渦流脫 離頻率難以測量,直到雷諾數大於 300 時,尾流才回復其週期特性,而 Tritton (1959)之研究認為此現象是由於三維不穩定性之產生所造成。Kiya and Matsumura (1988)在探討平板尾流之非相關紊流結構(incoherent turbulent structure)特性時,發現由非相關結構所產生的剪應力與相關結構中渦流脫離 頻率有關,且由相關結構所產生之擾動則主要反應在垂直水流方向上。 Kwon et al. (1992)發現在雷諾數較小的範圍內,無因次參數史徹荷數 (Strouhal number, St)將隨著雷諾數增加而快速增大,直到雷諾數為 400 至 700 時,史徹荷數會接近常數,約為 0.22。 近年來,隨著量測技術之發展,利用雷射都卜勒測速儀(laser Doppler velocimetry, LDV)及 PIV 等非侵入式量測技術於圓柱尾流流場之相關研究
6
也漸漸增加,因其不需放置儀器至流體中量測或感應,不會影響流體本身 結構之優點,提供了更加精確之速度量測,Lin and Hsieh (2003)即是應用二 維 LDV 同 步 量測法 ,並 配合 修正相 位平 均法 (modified phase average method),重建圓柱尾流速度場與渦流結構不同相位間之變化,並發現渦心 移動速度於 6 倍圓柱直徑範圍內屬於不穩定之加速區,在此範圍之後呈現 穩定速度向下游傳輸。PIV 量測技術具有全域瞬時速度量測之能力,能展現 流場於空間上之變化,徐華勇 (2002)即是利用 PIV 量測雷諾數為 500 至 10000 之單一圓柱尾流流場,進行空間中二維瞬時速度場之連續量測並與可 視化結果比較,並分析其中心軸速度變化、各斷面之速度剖面分布、迴流 區長度、半寬度(half-velocity-defect width)及速度欠損長度(defect length)之 特性,再與平板尾流流場之結果相比較,並以迴流區長度為一分界點,將 各項特性參數分為迴流區內外討論。林呈等人 (2004)則結合光纖雷射都卜 勒測速儀(fiber-optic laser Doppler velocimetry, FLDV)與 PIV,對圓柱近域尾 流流場進行同步量測,並以修正相位平均法分析速度場之相位變化,重建 流場中主渦脫離及傳輸等週期性運動,亦對迴流區內外平均速度場進行相 似性分析。謝世圳 (2008)進一步以小波轉換法(wavelet transform)推求渦流 之瞬時相位,探討主渦脫離及傳輸等具週期性變化之流場特性,發現紊流 擾動量之分佈於時間上並非隨機發生,而是與該瞬間之渦流流場特性有關。 除了上述研究外,另有對於多圓柱排列組合或圓柱與平板組合等流場
特性之研究,但主要多以二維流場條件下進行試驗,而本研究係為圓柱後 方存在一背向階梯流場,屬於三維流場運動,因此,本研究利用 PIV 沿水 深方向分層量測圓柱後方近域尾流流場之水平面,藉此探討背向階梯對於 圓柱尾流流場之影響,並分析階梯高度與渦流脫離頻率之關係。 1.3.2 背向階梯流場相關研究 背向階梯流場已廣泛應用於許多水利工程結構上,如固床工、攔河堰 下游之消能階梯及沉砂池等水工結構物;在航太機械工程中,背向階梯流 場亦被運用於衝壓引擎、熱傳導交換器與渦流機等機械構造中;在數值模 式應用上,背向階梯流場則常作為數值模式正確性之驗證案例。 當流體流經背向階梯時,由於流場分離現象而導致壓力變化與能量損 失,剪力層也因流域範圍突然擴張,產生逆向壓力梯度迫使流場向下彎曲, 與壁面重新接觸形成再接觸(reattachment)流場,由剪力層、再接觸點及壁面 所形成之區域即為階梯迴流區。因此,背向階梯流場大致上可分為三部份, 分別為自由流(free stream)、剪力層以及階梯迴流區,其流場分佈圖如圖 1-3 所示。而過去對於背向階梯流場之相關研究主要係探討迴流區大小、再接 觸長度(reattachment length)、迴流區紊流強度、剪應力分佈及剪力層等特 性,並分析其與雷諾數及流場幾何特性如展弦比 (aspect ratio)與突張比 (expansion ratio)等參數之關係。
8
圖 1-3 背向階梯流場分佈圖
再接觸點為剪力層往下游發展再次接觸到固體邊界之處,其為再成長 邊界層之起點,也代表著迴流區的大小,故許多研究特別重視再接觸點的 位置,而再接觸長度是指由階梯底部至再接觸點之水平距離,係為背向階 梯流場重要特徵尺度之一。Bradshaw and Wong (1972)整理過去對於再接觸 長度之研究,其結果顯示再接觸長度之範圍約為 6 至 8 倍階梯高度。而 Eaton and Johnston (1981)綜合許多前人之研究,歸納出五項影響再接觸長度之因 素: 1. 分離點前之邊界層狀態: 分離點前之邊界層狀態將影響剪力層之發展,進而影響再接觸長 度。若邊界層為層流,則再接觸長度將隨著雷諾數增加而增長;若為完 全紊流,則再接觸長度將趨於定值,不隨雷諾數之增加而改變。 2. 分離點前之邊界層厚度: 若分離點前之邊界層厚度增加,再接觸長度有縮短之趨勢。 3. 分離點前之紊流強度:
若分離點前之紊流強度增加,將會限制迴流區發展,使再接觸長度 有縮短之趨勢。 4. 流場縱向壓力梯度: 若突張比增大,再接觸長度亦隨之增加,而突張比係影響壓力梯度 之因素,因此,有研究指出壓力梯度之變化也會影響再接觸長度。 5. 幾何特性參數展弦比: 對於展弦比小於 10 之背向階梯流場,其分離點前之邊界層狀態若 為層流,再接觸長度將隨著展弦比增加而增長;若為紊流,則隨著展弦 比增加而縮短。而對於展弦比大於 10 之背向階梯流場,展弦比對再接 觸長度之影響則可以忽略。 由上述各項因素可知影響再接觸長度之因子,主要係與入流處之流場形態 及流場幾何特性參數有關。
在背向階梯流場中,再接觸點之位置並非一成不變的,Abbott and Kline (1962)對單階及雙階背向階梯流場的速度剖面、迴流區大小等特性進行研 究,發現再接觸點會以極低之頻率前後移動。Hasan (1992)觀察到當再接觸 點向上游移動時,會壓迫迴流區,使其將剪力層往外推,因而造成再接觸 點又往下游移動。Driver et al. (1987)之研究則說明造成再接觸點移動之原因 與迴流區之質量交換有關,當剪力層產生之渦流結構脫離階梯迴流區時, 將造成迴流區內流體減少,使剪力層往階梯方向縮減,造成再接觸點向上
10
游移動,待足夠之流體進入迴流區,使迴流區得以重新膨脹,讓剪力層往 下游方向延伸,使再接觸點向下游移動,如此循環,產生再接觸點來回移 動之現象,其中剪力層暫態擺動行為則被稱為拍擊運動(flapping motion), 其拍動頻率之量級(order of magnitude)比剪力層渦流脫離頻率(intermittent bursts)小一個等級。Heenan and Morrison (1998)則發現壁面噴流有抑制剪力 層拍擊運動之效果,因此,推測拍擊運動與迴流區之壓力擾動及渦流不穩 定回饋有關。而背向階梯流場剪力層渦流脫離現象係由 Brown and Roshko (1974)利用兩種不同密度之流體作可視化法觀測所發現。Huang and Fiedler (1997)則進行起始流(starting flow)之研究,探討初始渦流結構發展至穩態之 過程,藉此了解渦流對背向階梯流場之影響。
此外,另有研究指出拍擊運動與階梯迴流區之角落渦漩(corner eddy)發 展有關,角落渦漩亦有人稱之為二次迴流區(secondary recirculation region), Spazzini et al. (2001)量測階梯迴流區下壁面應力,並利用小波分析應力訊 號,根據觀察角落渦漩之發展與拍擊運動之頻率,推測兩者相互消長,當 角落渦漩之強度和大小在發展至與階梯高度相同後便會瓦解。黃興閎 (2004)對於五種不同階梯結構及含壁面噴流之背向階梯流場,進行 PIV 流場 觀測及壓力擾動之量測,並以暫態流場結構的觀點出發,描述各部份細部 結構間的相互作用,認為角落渦漩之大小和結構是背向階梯流場發展之關 鍵因素,而剪力層低頻拍擊運動也與角落渦漩消長有關;在含壁面噴流之
背向階梯流場實驗中,發現壁面噴流對迴流結構的影響順序為角落渦漩、 主迴流區及剪力層,因此,認為整個流場的質量交流路徑依序為自由流、 剪力層、主迴流區而至角落渦漩。 本研究之重點為圓柱與階梯組合形式之圓柱尾流流場變化,本研究以 PIV 量測階梯迴流區內水平流場,藉此了解圓柱之渦流於階梯迴流區之傳輸 以及對階梯迴流區之影響。 1.3.3 質點影像測速法 在傳統流場量測方法中,通常採用熱線(hot-wire)及皮托管(pitot tube)等 量測儀器進行單點量測,係為侵入式量測系統,需置入探頭至流場內感應, 影響流場本身之結構而造成誤差,且在有迴流行為之流場中,有時無法準 確反映實際流速。近二十幾年來,由於相機與圖像處理技術迅速發展,流 場量測技術已逐漸由單點侵入式發展為二、三維非侵入式觀測,如定量影 像量測技術(quantitative image,簡稱 QI),其中包含 LSV (laser speckle velocimetry)、PIV、PTV (particle tracking velocimetry)與 PSV (particle streak velocimetry)等光學量測方法,其中 PIV 量測方式在近十多年來被廣泛應用 於流場量測,且 PIV 技術在圖形辨識與影像處理流程方面,對於真實流場 中的流況亦有較佳的觀察性。
對於影像分析方面,利用質問窗(interrogation window)為基礎的互相 關演算方法(cross-correlation algorithm)被廣泛地使用在 PIV 的計算方面,如
12
Liang et al. (2002)、Thomas et al. (2005)、Theunissen et al. (2007)、Goubergrits et al. (2009),利用時序性單一曝光之兩張影像,於同位置,利用相同的質問 窗演算位移量(displacement),其相關函數法如下式所示: Φ(𝑚, 𝑛) = ∑𝑀𝑖=1∑𝑁𝑗=1g1(𝑖, 𝑗) ∙ g2(𝑖 − 𝑚, 𝑗 − 𝑛) (1-1) 上式中,Φ(m, n)為相關函數之摺合積分;g1(i, j)與 g2(i, j)為時序性影像亮度 值分佈;M×N 為質問窗大小;i 與 j 為兩張影像比對之初始位置;m 及 n 分 別為 i 方向及 j 方向之位移量,再進行相關函數計算時使用快速傅立葉轉換 (fast Fourier transform, FFT)演算法計算之。
對於計算誤差之分析,Westerweel (1994)提出 PIV 量測數值資料誤差可 分為量測錯誤之數值或計算錯誤產生之不合理速度向量值與帶有不確定因 素之誤差的量測數值兩類。而 Nogueria (1997)對於前者進行研究,探討如何 判斷數值資料的正確性,並對不合理之向量進行修正。Huang (1997)研究 PIV 影 像 計 算 的 誤 差 , 歸 納 出 二 個 主 要 之 計 算 誤 差 , 分 別 為 方 均 根 誤 差 (root-mean-square)與偏移誤差(bias error),並對此二誤差作量化探討。 1.4 研究方法 本研究以 ARGON LASER 雷射光束作為光源,利用反射鏡將光源導引 至試驗水槽旁的光學玻璃棒,使光源透過光學玻璃棒形成雷射光頁,再由 Fastec 高速攝影機擷取通過雷射光頁下之質點影像。 PIV 影像量測沿水深方向分數層水平面進行量測,而後將擷取之連續影
像利用影像轉檔程式及影像分析與計算程式進行演算分析,以獲得流場之 瞬時速度及渦度場,最後再以離散傅立葉轉換法(discrete Fourier transform, DFT)分析圓柱尾流擺盪頻率,藉此獲得階梯高度與尾流擺盪頻率之關係。 1.5 本文組織 本研究為背階圓柱尾流特性之試驗研究,全文共分為五章,茲簡述章 節內容如下: 第一章為本文之研究動機與研究目的,並對於圓柱尾流流場、背向階 梯流場及 PIV 影像分析之相關文獻進行回顧,最後簡述實驗研究方法以及 本研究組織架構。 第二章為試驗儀器佈置規劃,包含光學設備系統、影像系統、試驗水 槽等試驗相關儀器佈置、試驗條件及試驗步驟,最後說明 PIV 法量測技術、 影像處理流程與頻率分析方法。 第三章為試驗結果,分別依照單一圓柱、背向階梯、圓柱與階梯組合 之流場量測結果進行說明。 第四章為結果分析與討論,探討圓柱與階梯組合流場之特性,並比較 不同階梯高度與圓柱尾流擺盪頻率之關係。 第五章為結論與建議,歸納本研究成果,提出建議與未來研究方向。
14
第二章、試驗佈置規劃與分析方法
2.1 試驗佈置規劃 2.1.1 試驗儀器佈置 儀器設備主要可分為光學系統、影像系統與試驗水槽三部份。光學系 統係以 ARGON LASER 產生之雷射光束為光源,利用反射鏡將雷射光束導 引至試驗段旁的三維移動平台,調整平台使其保持水平狀態並固定於地 面,雷射光束經過設置於平台上之透明圓柱棒形成 3 至 4 釐米厚之水平光 頁進入試驗區,至此完成光學系統之儀器設置,圖 2-1 至圖 2-3 分別為 ARGON LASER、反射鏡裝置、三維移動平台與透明圓柱棒。 影像系統係以固定於微調平台上之 Fastec 高速攝影機為主,如圖 2-4 所示,將高速攝影機固定於試驗段上方,調整鏡軸,使之垂直於水平光頁, 以確保量測之圓柱尾流流場為水平面,而 Fastec 攝影機能以高速擷取影像 並進行錄製,擷取速度及錄製影像張數根據影像擷取範圍之設定有所不 同,以本研究採用 1280 × 1024 畫素(pixel)之影像解析度為例,擷取速度最 快達每秒 500 張影像,錄製影像張數最多為 1040 張。 本試驗係於國立交通大學土木工程學系河川輸砂實驗室中進行,試驗 水槽為長 10 公尺、寬 0.4 公尺、高 0.5 公尺、坡度為 0.003 之循環水槽,水 槽前端水流入口處設置一蜂巢結構(honeycomb),用於整流,使水流能平順 進入試驗段,如圖 2-5 所示,並將試驗相關設備如階梯與圓柱模型,佈置於水槽中段位置,圖 2-6 為試驗水槽及相關佈置圖。水槽流量率定曲線如圖 2-7,係經由觀測水位流量比對馬達轉數求得,經迴歸分析得知試驗水槽流 量率定公式為流量 Q = 0.0003x−0.0012 cms,R2 =0.98,其中 x 為馬達轉速。 階梯模型長 2 公尺、寬 0.4 公尺,高度有 0.010、0.025 及 0.05 公尺三種, 皆以黑色壓克力材質板組成,固定於試驗段;圓柱模型則為直徑 0.01 公尺 之實心圓柱,固定於上階梯之邊緣位置,柱體周圍及渠道底部皆以黑色噴 漆上色,並以黑色壁紙覆蓋試驗段受雷射光照射之另一壁面,避免 PIV 量 測時造成雷射光散射。 圖 2-1 ARGON LASER 圖 2-2 反射鏡裝置
16
圖 2-3 三維移動平台與透明圓柱棒
圖 2-4 Fastec 高速攝影機
圖 2 -6 試驗水 槽及 相關佈置 圖
18 圖 2-7 試驗水槽流量率定曲線 2.1.2 因次分析 為決定影響圓柱尾流擺盪頻率之相關物理參數,本試驗將物理參數因 子分為三類,分別為流體性質、水力特性與幾何特性。流體性質包含:流 體密度(ρ)、動力黏滯係數(μ);水力特性包含:上游斷面平均流速(U0)、上 游水深(h)、重力加速度(g);幾何特性包含:圓柱直徑(D)、渠道寬度(B)、 階梯長度(L)、階梯高度(H)、底床坡度(S)。將上述影響因子與圓柱尾流擺盪 頻率(ω)之關係整理如下式: 𝜔 = 𝑓(𝜌, 𝜇, 𝑈0,g, 𝐷, 𝐵, 𝐿, 𝐻, ℎ, 𝑆) (2-1) 選定ρ、U0與 D 為重複參數,利用柏金漢定理(Buckingham pi theorem)進行
因次分析,其無因次式如下式: 𝜔𝐷 𝑈0 = 𝜙( 𝜌𝑈0𝐷 𝜇 , 𝑈0 √g𝐷, 𝐵 𝐷, 𝐿 𝐷, 𝐻 𝐷, ℎ 𝐷, 𝑆) (2-2)
因本試驗中,圓柱直徑、渠道寬度、階梯長度、上游水深及底床坡度均為 定值,故不考慮其變化之影響,並以𝑈0 √gℎ替換 𝑈0 √g𝐷,作為描述明渠流上游流況 之參數,因此,可將式 2-2 簡化為下式: 𝜔𝐷 𝑈0 = 𝜙( 𝜌𝑈0𝐷 𝜇 , 𝑈0 √gℎ, 𝐻 𝐷) (2-3) 上式中,𝜔𝐷 𝑈0為史徹荷數(Strouhal number, St),代表圓柱尾流週期特性; 𝜌𝑈0𝐷 𝜇 為 雷諾數(Reynolds number, Re),代表圓柱近域尾流流場形態;𝑈0
√gℎ為福祿數 (Froude number, Fr),代表上游流況;𝐻 𝐷為無因次階梯高度。 2.1.3 試驗條件 根據因次分析之結果,於本試驗中影響尾流擺盪頻率之因子為上游流 速及階梯高度,故以此兩項參數進行不同試驗案例之設計,相關試驗案例 如表 2-1 所示。其中在改變上游流速之部分,由於圓柱阻擋水流,造成圓柱 前方水位抬升,使水表面形成湧水現象,影響 PIV 影像量測,故本試驗在 湧水現象較不強烈之流速範圍內,選擇 0.120、0.165、0.210 m/s 作為試驗 條件之上游流速。本試驗除了改變階梯高度及上游流速外,亦進行單一圓 柱、單一階梯流場試驗,故試驗案例分為單一圓柱試驗案例 C1 至 C3、單 一階梯試驗案例 H11 至 H33 及圓柱與階梯組合試驗案例 CH11 至 CH33 三 部分。
20 表 2-1 試驗案例表 案例 圓柱直徑 D (公尺) 階梯高度 H (公尺) 上游水深 h (公尺) 上游流速 U0 (公尺/秒) 福祿數 Fr 雷諾數 Re 單 一 圓 柱 試 驗 C1 0.01 無階梯 0.05 0.120 0.17 1195 C2 0.165 0.24 1644 C3 0.210 0.30 2092 單 一 階 梯 試 驗 H11 無圓柱 0.010 0.120 0.17 1195 H12 0.165 0.24 1644 H13 0.210 0.30 2092 H21 0.025 0.120 0.17 1195 H22 0.165 0.24 1644 H23 0.210 0.30 2092 H31 0.050 0.120 0.17 1195 H32 0.165 0.24 1644 H33 0.210 0.30 2092 圓 柱 與 階 梯 組 合 試 驗 CH11 0.01 0.010 0.120 0.17 1195 CH12 0.165 0.24 1644 CH13 0.210 0.30 2092 CH21 0.025 0.120 0.17 1195 CH22 0.165 0.24 1644 CH23 0.210 0.30 2092 CH31 0.050 0.120 0.17 1195 CH32 0.165 0.24 1644 CH33 0.210 0.30 2092
試驗採用卡式座標系統(Cartesian coordinates system),以圓柱與階梯之 交界面為基準面,圓柱中心點為基準點,如圖 2-8 所示,定義水流方向為正 X 軸,鉛垂向上為正 Y 軸,依照右手螺旋定則(right-hand rule)垂直向外為正 Z 軸。流場之量測將沿水深方向分層進行,考慮流場受階梯影響,故以階梯 高度因子 H 定義欲量測之水平面位置,使量測水平面能依照不同階梯高度 進行調整,其各量測水平面之位置及代號如圖 2-9 所示,共分為 9 層,其中 A、B 為圖 2-8 中之 A、B 窗格,分別代表圓柱尾流流場部分 Z1至 Z4與階 梯迴流區流場部分 Z5至 Z9之影像量測範圍,影像擷取速度均為每秒 500 張 影像,擷取時間為 2 秒,影像大小為 1280 × 1024 畫素。 圖 2-8 坐標軸定義及量測範圍示意圖(俯視圖)
22 圖 2-9 PIV 量測水平面位置示意圖 2.1.4 試驗步驟 1. 將圓柱與階梯模型佈置於試驗區段並固定之,以免試驗時受水流沖 擊而偏移。 2. 啟動抽水馬達,調整轉速至所需流量,待水注入試驗渠槽後,調整 尾水板,控制水位至試驗所需水深。 3. 待流場穩定後,啟動雷射,調整至適當瓦數。 4. 調整光頁高度至欲量測之水平面,將顯影質點均勻分佈於水中。 5. 以高速攝影機擷取影像,並將欲分析之影像儲存於記憶卡中,傳送 至電腦存檔並進行影像分析計算。 6. 改變光頁高度直到所有待測水平面皆量測完成,關閉雷射及馬達, 停止供水。 7. 變更佈置案例,重複上述 1 至 6 之步驟。
2.2 質點影像測速法之影像分析 2.2.1 影像處理 PIV 法係以兩張具有時序性之質點影像進行位移分析,影像大小可依量 測範圍之大小進行設定,如 1280 × 1024 畫素或 640 × 480 畫素組合,每一 位置之畫素均有一亮度值代表,其範圍為 0 至 255 亮度強度值,如此整張 影像即有完整亮度分佈。實驗時將顯影質點均勻分佈於水中,有質點位置 之亮度值,在光源的作用下,其值會比沒有質點的亮度值高,藉由此特性 進行質點位移之估算。 本試驗選用 8-12μm 之玻璃孔珠作為顯影質點,密度約為 1.03 至 1.10 g/cm3間,因此,有質點亮度位置之亮度值分佈,如圖 2-10 所示,為具有時 序性影像轉換後,其質點亮度空間分佈值情況。 圖 2-10 具時序性影像之質點亮度值分佈圖
24 2.2.2 質點影像分析理論 將質點影像亮度值數位化後,依照設定之質問窗 M×N 大小,將兩張影 像切割成許多區塊,如圖 2-11 所示,並依相關位置個別進行位移演算,計 算完成後再進行計算準確性判別,最後經由精確度演算,即可求得質點位 移與速度向量。其演算過程說明如下: 1. 質點位移估算: 本研究之質點位移估算使用互相關函數法,其演算方法建立在兩張 具有時序性之影像資料,將其質問窗內影像亮度值分佈轉換為訊號後, 利用相關函數法求得其質問窗內之最大值作為判斷依據,相關函數法如 1.3.3 節之式 1-1 所示。而為有效降低計算時間與提高準確性,將互相關 函數法轉為常態化互相關函數法(normalized cross-correlation function) 進行演算,其方程式如下: 𝐶̅𝑛𝑜𝑟(𝑚, 𝑛) = ∑𝑀𝑖=1∑𝑁𝑗=1[g1(𝑖,𝑗)−g̅̅̅][g1 2(𝑖−𝑚,𝑗−𝑛)−g̅̅̅]2 √𝜎1(𝑖,𝑗)𝜎2(𝑖,𝑗) (2-4) 𝜎1 = ∑ ∑𝑁 [g1(i, j) − g̅̅̅]1 2 𝑗=1 𝑀 𝑖=1 (2-5) 𝜎2 = ∑ ∑𝑁 [g2(i − 𝑚, j − 𝑛) − g̅̅̅]2 2 𝑗=1 𝑀 𝑖=1 (2-6) g1 ̅̅̅ =𝑀∙𝑁1 ∑𝑀𝑖=1∑𝑁𝑗=1g1(𝑖, 𝑗) (2-7) g2 ̅̅̅ = 𝑀∙𝑁1 ∑𝑀𝑖=1∑𝑁𝑗=1g2(𝑖 − 𝑚, 𝑗 − 𝑛) (2-8) 其中,𝐶̅𝑛𝑜𝑟(𝑚, 𝑛)為影像質問窗比對(pattern matching)之互相關係數, 其值介於 0 與 1 之間,並定義最大值為最有可能之位移量 m 與 n,如圖
2-12 所示;g̅̅̅與g1 ̅̅̅為質問窗內亮度分佈之平均值。 2
圖 2-11 PIV 計算質問窗大小示意圖
26
在演算常態化互相關函數法過程方面,一般常用的兩種演算技術, 其一為 FFT 演算法:為具有時序之影像,利用質點空間分佈(spatial domain)與頻率分佈(frequency domain)關係,進行位移演算,求得質點 影像之位移量(Willert and Gharib, 1991);另一種為直接演算常態化互 相 關 係 數 法 ( normalized cross-correlation coefficient )( Fincham and Spedding, 1997;Huang et al., 1997;Huang, 1998),係利用質點空間分 佈 與時序性 之影像 ,直接 進 行位移 演算,求 得常態 化互相關 係數 𝐶̅𝑛𝑜𝑟(𝑚, 𝑛)而得知影像間質點之位移量。 在計算速度上,FFT 演算法快於直接演算法,但 FFT 演算法對影 像中之質點密度分佈與質問窗大小相當敏感,直接影響在計算之速度 上;一般以 2k的指數設定質問窗大小,k 值介於 4 至 7 間之整數。而直 接演算法可以依實際需求進行質問窗設定,不受 2k 的影響。在演算精 準度上,直接演算法高於 FFT 演算法。在計算時間上,FFT 演算法所 需時間短於直接演算法。兩種方法共同點,為 m 與 n 演算結果均為整 數,因此,在演算後的精確度均需再進一步修正,其修正方法一般稱為 子畫素修正。 2. 子畫素修正: 互相關函數演算結果於質問窗內之位移量為整數,此情況與實際影 像位移可能存在±0.5 畫素之差距,為增加計算上之準確度,利用子畫素
修正方法以提升準確性。質點實際位移量 mr與 nr分別於 i 與 j 方向表示 如下: 𝑚𝑟 = 𝑚 + 𝜀𝑚,− 0.5 ≤ 𝜀𝑚 ≤ 0.5 (2-9) 𝑛𝑟 = 𝑛 + 𝜀𝑛,− 0.5 ≤ 𝜀𝑛 ≤ 0.5 (2-10) 其中,m 與 n 為𝐶̅𝑛𝑜𝑟(𝑚, 𝑛)演算結果決定;εm及 εn分別為 m 與 n 在 i 與 j 方向質問窗內質點之平均位移量與實際值間之校正差值。修正 εm及εn 之方法有很多種,如高斯曲線子畫素修正法(Gaussian curve-fitting)、拋 物線子畫素修正法(parabolic curve-fitting)、形心子畫素修正法(centroid method)等方法來降低位移誤差值,各修正法之說明如下,而圖 2-13 為 各修正法所使用之參數位置示意圖。
(1) 高斯曲線修正法(Willert and Gharib, 1991;Huang, 1997) 𝜀𝑚 = ln 𝐶̅𝑛𝑜𝑟(𝑚−1,𝑛)−ln 𝐶̅𝑛𝑜𝑟(𝑚+1,𝑛) 2[ln 𝐶̅𝑛𝑜𝑟(𝑚−1,𝑛)+ln 𝐶̅𝑛𝑜𝑟(𝑚+1,𝑛)−2 ln 𝐶̅𝑛𝑜𝑟(𝑚,𝑛)] (2-11) 𝜀𝑛 = ln 𝐶̅𝑛𝑜𝑟(𝑚,𝑛−1)−ln 𝐶̅𝑛𝑜𝑟(𝑚,𝑛+1) 2[ln 𝐶̅𝑛𝑜𝑟(𝑚,𝑛−1)+ln 𝐶̅𝑛𝑜𝑟(𝑚,𝑛+1)−2 ln 𝐶̅𝑛𝑜𝑟(𝑚,𝑛)] (2-12) 其中,m+1、m−1、n+1 及 n−1 分別為質問窗內峰值之前 1、後 1、 左 1 及右 1 畫素之𝐶̅𝑛𝑜𝑟。
(2) 形心法(Willert and Gharib, 1991) 𝜀𝑚 = 𝐶̅𝑛𝑜𝑟(𝑚+1,𝑛)−𝐶̅𝑛𝑜𝑟(𝑚−1,𝑛)
𝐶̅𝑛𝑜𝑟(𝑚+1,𝑛)+𝐶̅𝑛𝑜𝑟(𝑚,𝑛)+𝐶̅𝑛𝑜𝑟(𝑚−1,𝑛) (2-13) 𝜀𝑛 = 𝐶̅𝑛𝑜𝑟(𝑚,𝑛+1)−𝐶̅𝑛𝑜𝑟(𝑚,𝑛−1)
𝐶̅𝑛𝑜𝑟(𝑚,𝑛+1)+𝐶̅𝑛𝑜𝑟(𝑚,𝑛)+𝐶̅𝑛𝑜𝑟(𝑚,𝑛−1) (2-14) (3) 拋物線法(Willert and Gharib, 1991)
28 𝜀𝑚 = 𝐶̅𝑛𝑜𝑟(𝑚−1,𝑛)−𝐶̅𝑛𝑜𝑟(𝑚+1,𝑛) 2[𝐶̅𝑛𝑜𝑟(𝑚−1,𝑛)−2𝐶̅𝑛𝑜𝑟(𝑚,𝑛)+𝐶̅𝑛𝑜𝑟(𝑚+1,𝑛) (2-15) 𝜀𝑛 = 𝐶̅𝑛𝑜𝑟(𝑚,𝑛−1)−𝐶̅𝑛𝑜𝑟(𝑚,𝑛+1) 2[𝐶̅𝑛𝑜𝑟(𝑚,𝑛−1)−2𝐶̅𝑛𝑜𝑟(𝑚,𝑛)+𝐶̅𝑛𝑜𝑟(𝑚,𝑛+1) (2-16) 上述方法中以高斯曲線修正法較為普及,其主要原因為質點亮度之分佈 較接近高斯分佈。 圖 2-13 質問窗內子畫素修正法之互相關係數值示意圖 3. 不一致資料去除: 經過常態化互相關函數法演算與子畫素修正後,質問窗內產生已有 質點的 m 與 n 位移量,此 m 與 n 之位移量,須跟鄰近的質問窗演算結 果進行比較,以去除錯誤與不一致資料,如圖 2-14 所示,於圖下方出 現不一致資料,需進行去除。
Keane and Adrian (1990)以敏感度 D0為判別基準,其定義為質問窗
內之常態化互相關函數法之最大峰值除以第二大峰值之比值: 𝐷0 = 𝐶̅𝑛𝑜𝑟1𝑠𝑡
其中,𝐶̅𝑛𝑜𝑟1𝑠𝑡與𝐶̅𝑛𝑜𝑟2𝑛𝑑分別為常態化互相關函數法之最大與第二大峰 值,如 D0>1.3 之向量位移為有效向量,此 D0值可根據影像品質進行適
當之調整,此敏感度之基準亦可用在雜訊比過濾(singal-to-noise ratio, snr),將不一致資料先行去除。
Westerweel (1994)對於 PIV 去除不一致資料方法提出局部平均過濾 (local mean filter),當質點位移量除以時間後,即可得到質問窗內之速 度向量。於整體流場中鎖定個別速度向量,且比照周圍八個向量,計算 範圍為 3×3 質問窗,當該向量相較於周圍之向量較為不一樣,例如兩倍 大時,可以發現此區域可能至少有一個質問窗內之速度向量為可移除, 其資料判斷方法步驟說明如下: (1) 速度值之判別: 𝑉𝑒𝑙 = ∑8𝑖=1|𝑣𝑖−𝑣0| ∑8 |𝑣𝑖| 𝑖=0 (2-18) 𝑣𝑖(𝑘, 𝑙) = √𝑢(𝑘, 𝑙)2+ 𝑣(𝑘, 𝑙)2,i = 0,1, … ,8 (2-19) 其中,Vel 為由周邊之速度向量值之絕對差值;k 及 l 為質問窗位置; u(k, l)與 v(k, l)為質問窗水平速度與垂直速度;v0為速度判斷值;vi(k,
l)(i=1,…,8)為 v0周邊之平均速度。Nogueira et al. (1997)對 Vel
值之容忍範圍約 20-35%。 (2) 向量角度判別:
𝜃 =∑8𝑖=1|𝜃𝑖−𝜃0| ∑8 |𝜃𝑖|
30 𝜃𝑖 = tan−1 𝑣(𝑘,𝑙) 𝑢(𝑘,𝑙)+ 360° (2-21) 其中,θi (i=0,1,…,8)為 u(k, l)與 v(k, l)之夾角;加上 360°確保夾角為 正值。 (3) 有效資料之判別(data validation): 𝑣𝑎𝑙(𝑘, 𝑙) = √𝑉𝑒𝑙2+ 𝜃2 (2-22) 其中,val(k, l)為判別有效之向量值。
為了判別 vi之有效值,對 val 設一有效標準值,Jaw and Wu (2000)
建議可根據不同影像條件,設 val 在 25 至 35%以內為有效向量值。 重複上述方法,判斷有效流速向量值,保留有效之流速向量,並將不一 致資料去除,如圖 2-15 所示。
圖 2-15 去除不一致流速向量圖 2.2.3 PIV 影像計算之誤差
影像計算誤差約可分為以下三大類型:質問窗內質點的脫離或配對錯 誤;隨機誤差(random error)或方均根誤差(root-mean-square);系統誤差 (systematic error)或偏移誤差(bias error)。茲說明如下:
1. 質問窗內質點的脫離或配對錯誤: 造成位移量的誤差,兩張影像在質問窗之互相關係數法計算時,可 能因質點位移較大或質點離開光頁。誤差主要原因為可能流速過快、速 度梯度過大或三維流場的效應使質點離開觀測位置。此類誤差可經由不 一致資料處理過程,去除錯誤之位移量。 2. 隨機誤差(方均根誤差):
32 隨機誤差係由隨機性之因素所造成,誤差來源可能由於質點的比重 與分佈密度、流體三維運動劇烈、速度梯度或剪力場較大、擷取影像之 背景雜訊影響等因素,為了降低所造成之誤差,可增加實驗量測次數。 此類誤差亦稱為精確誤差(precision error),其分散程度的大小則取決 於測量值之標準差(standard deviation)或 RMS 誤差,如圖 2-16 所示。 其公式如下: 𝑑𝑚 =𝑁1∑𝑁𝑖=1𝑑𝑖 (2-23) σ = √𝑁1∑𝑁 (𝑑𝑖 − 𝑑𝑚)2 𝑖=1 (2-24) 其中,di為質問窗之位移量;dm為質問窗位移平均值。 圖 2-16 RMS 誤差之示意圖 3. 系統誤差(偏移誤差): 系統誤差來自於一些已知因素,如外在環境因素(溫度、電壓或 CCD 影像擷取、儲存傳輸過程)、人為操作不熟悉或設計原理有失誤而 造成系統偏差。此類誤差不含有隨機分佈之誤差,其偏差量有一致性,
此類偏差可經由修正方法降低其誤差量,因此系統誤差亦稱為偏移誤差 (bias error)。於影像分析計算過程中,偏移誤差與互相關函數法之峰 度值鎖定(peak-locking)有關,主要係因質問窗計算所得之峰度值(最 有可能之位移值)與質問窗內之真實位移值無法完全吻合。偏移誤差 (db)為已知之真實位移值(da),如位移 0 畫素(zero particle image
displacement)或位移大於 1 畫素,與質問窗內計算所得之平均值(dm) 之差,如圖 2-17 所示,其公式如下: 𝑑𝑏 = 𝑑𝑚− 𝑑𝑎 (2-25) 圖 2-17 偏差誤差之示意圖 本研究利用 35 組影像,其位移量為已知條件下進行模擬(Liang et al., 2002),此外亦進行隨機誤差分析,以確定影像分析方法適用於流場 分析,模擬影像大小為 320×128 畫素、質問窗為 32×32 畫素,利用高斯 子畫素修正法,計算結果如圖 2-18 與圖 2-19 所示,當已知位移量較大 之情況下,其隨機誤差與偏移誤差逐漸偏大。此兩種誤差的估算與已知
34 位移量之比較,相差二個級數,因此,可假設於 PIV 計算上的誤差於位 移量分析時影響不大。 圖 2-18 方均根誤差量 圖 2-19 偏移誤差量 圖 2-20 為國際上對 PIV 計算方法提供之標準圖,影像大小為 472×488 畫素,為兩種不同流體的運動,其中,上層速度往右移動、下 層往左移動,於交界面附近產生邊界層作用,其計算結果如圖 2-21 所 示,並將位於圖上水平方向 288 畫素處之計算結果進行分析,如圖 2-22 所示,可清楚顯示出上下兩層流體之質點位移速度與交界面附近之位移
速度分佈情況。選用此組標準圖係測試 PIV 方法應用在兩種不同流體下 之流體交界面之運動特性,如速度梯度與渦流現象。經由測試結果,認 為 PIV 方法亦能使用於圓柱尾流流場之分析研究。 圖 2-20 對 PIV 計算方法提供之標準圖 (資料來源:http://www.math.uio.no/~jks/matpiv) 圖 2-21 標準圖之 PIV 計算結果圖
36 圖 2-22 於 288 畫素位置處之質點位移速度分佈圖 2.3 離散傅立葉轉換之頻率分析 2.3.1 離散傅立葉轉換法 一般而言,時間序列(time series)係指具有時序性之數值集合,或更確 切地說,是對某動態系統(dynamic system)隨時間連續觀察,其所產生連續 觀測值之數列,也就是訊號。由於訊號之紀錄,皆架構於時間序列上,而 為了找出訊號於時間序列中所隱藏之特性,發展出許多訊號處理之方法, 本研究採用之離散傅立葉轉換法 DFT 即為其中一種,其計算式如下: 𝒳(𝑘) = ∑𝑁−1𝑛=0[𝑒−2π𝑖𝑁𝑛𝑘 ∙ 𝑥(𝑘)] ,𝑘 = 0,1, … , 𝑁 − 1 (2-26) 其中,x(k)為有 N 筆數值資料之時間序列;Χ(k)為經過 DFT 轉換後之數列。
2.3.2 離散傅立葉轉換法之分析及驗證 經由 DFT,可以將訊號由時間域轉換到頻率域上,藉此得知訊號所包 含之頻率,然而,應用 DFT 於頻譜分析需注意取樣頻率之選擇,不適當的 取樣頻率將會造成混疊(aliasing)現象,導致訊號失真,圖 2-23 即為混疊現 象示意圖,圖中黑色實線代表對原訊號取樣所獲得之時間數列數值大小, 而紅色虛線部份為根據取樣結果還原之訊號,從圖中可以發現兩者週期之 差異,顯示不適當的取樣頻率將導致訊號失真,造成 DFT 求得錯誤之頻率。 為了避免混疊現象之發生,於訊號週期內至少需有兩個取樣點,也就是說, 取樣頻率需大於訊號所包含之最大頻率兩倍以上,以確保原訊號之頻率能 被正確地偵測出來。本研究之取樣頻率即為影像擷取速度,其為 500 赫茲, 所能偵測之最大頻率,即尼奎士頻率(Nyquist frequency)為 250 赫茲,頻率 偵測範圍應足以包含圓柱尾流擺盪之頻率。 圖 2-23 混疊現象示意圖
38 本研究為了滿足 PIV 流場計算之精度,故選擇 500Hz 之影像擷取速度, 而受限於高速攝影機本身之限制,在影像範圍為 1280×1024 之設定下,影 像錄製張數最多為 1040 張,約為 2 秒,造成取樣之樣本週期數不夠充足。 因此,本研究假設 4 組已知頻率之訊號,依照試驗條件即取樣頻率為 500 赫茲,取樣時間為 2 秒進行取樣及頻率分析,將 DFT 計算結果與原訊號之 頻率比較,以了解在樣本週期數不充足之情況下,DFT 是否符合要求之精 度。訊號 1、2 分別如圖 2-24、圖 2-25 所示,係由正弦及餘弦波疊合產生 之模擬訊號,各別包含有 1 赫茲與 4 赫茲、2 赫茲與 10 赫茲之頻率,並有 隨機擾動量存在,經由 DFT 計算,其結果之能量頻譜圖分別如圖 2-26 及圖 2-27 所示,圖中峰值所在位置即代表該訊號之頻率,其訊號 1、2 之計算結 果顯示與原頻率之相對誤差皆約為 0.1%。 圖 2-24 訊號 1 之曲線圖
圖 2-25 訊號 2 之曲線圖
圖 2-26 訊號 1 之能量頻譜曲線圖
40 訊號 3、4 如圖 2-28 及圖 2-29 所示,為含有隨機擾動量之正弦波,頻 率分別為 2.4 赫茲及 4.3 赫茲,DFT 計算結果分別為 2.5 赫茲及 4.5 赫茲, 如圖 2-30 及圖 2-31 所示,與原訊號頻率之相對誤差上升至 4.1%、4.6%, 誤差增大之原因係由於在樣本週期數不夠充足之條件下,取樣時間不為訊 號週期倍數,使能量頻譜中最靠近訊號頻率之 DFT 分量,將在波幅上減小 並逸散至其他頻率,造成誤差,此現象稱為汙染(smearing)或洩漏(leakage)。 為了減少污染現象之影響,將利用填補運算(packing operation)之概念, 對樣本數列長度進行修正,其修正方法係於樣本數列後方以數值 0 填補, 使數列長度增長至 2,048 個,再進行 DFT 運算,其結果如圖 2-32 及圖 2-33 所示,與原訊號頻率之相對誤差已減小至 1.71%及 2.21%,顯示以填補運算 之概念增加數列長度能減少污染現象之影響。因此,本試驗將於樣本數列 後方以 0 填補至數列長度為 2,048 個,再進行 DFT 計算,以減少汙染現象 之影響。 圖 2-28 訊號 3 之曲線圖
圖 2-29 訊號 4 之曲線圖
圖 2-30 訊號 3 之能量頻譜曲線圖
42
圖 2-32 訊號 3 經修正後之能量頻譜曲線圖
第三章、試驗結果
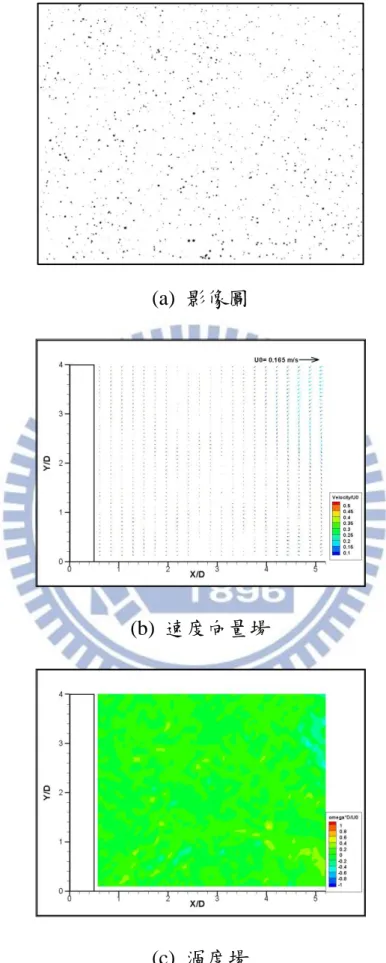
本章將試驗結果分為三部份進行說明,分別為單一圓柱試驗、單一背 向階梯試驗、圓柱與階梯組合試驗,各試驗之量測結果分為擷取影像、速 度向量分佈與渦度場部份。其中,擷取影像圖藉由反相(inverse)處理,使影 像背景呈現白色,質點部分呈現黑色,使影像結果呈現上較原始擷取影像 圖清楚。而速度及渦度場皆以無因次化表示,其中無因次渦度定義為 𝛺∗ = 𝛺𝐷 𝑈0,D 為圓柱直徑,U0為上游流速,渦度Ω定義為 1 2( 𝜕𝑣 𝜕𝑥− 𝜕𝑢 𝜕𝑦),代表 X 方向與 Y 方向速度分量 u、v 於空間上之速度變化,渦度之絕對值越大,速 度梯度越大,其速度變化也越劇烈。 3.1 單一圓柱近域尾流流場量測結果 單一圓柱試驗案例 C1、C2 及 C3,在固定流量分別為 0.002、0.003 及 0.004 cms(福祿數 Fr 分別為 0.17、0.24 及 0.30)流況條件下進行,並沿水深 方向分為 4 層水平面 Z1至 Z4進行量測,但因在單一圓柱試驗部份未設置階 梯,故階梯高度因子採用與案例 CH31、CH32、CH33 相同,即 H 為 0.05 公尺,作為往後與其比較之依據。 圖 3-1 至圖 3-6 依序為試驗案例 C1、C2 及 C3 圓柱尾流流場各量測平 面之擷取影像、速度向量分佈及渦度場,於圖中左方黑色實心半圓為圓柱 位置。各層速度場之量測結果顯示圓柱後方存在一低流速區域,為圓柱迴 流區;而圍繞柱體周圍發展之邊界層因慣性力、黏滯力與壓力之影響產生44 分離(separation)現象,形成剪力層位於圓柱迴流區兩側,因剪力層與圓柱迴 流區之速度差異,使剪力層向圓柱迴流區內捲曲形成渦流,而圓柱迴流區 下游處類似波浪狀之速度向量分佈即為圓柱擺盪之尾流,係由向下游移動 之渦流所形成;渦度場之量測結果則清楚顯示剪力層與渦流之位置以及渦 流大小。比較各層流場量測結果,發現越接近圓柱底部,圓柱迴流區大小 及渦流尺度皆有縮小之趨勢,且因靠近圓柱底部有三維流場運動產生以及 底部邊界層影響,使得擾動增加,流場顯得較紊亂;由案例 C1 至 C3 可發 現隨著上游流速增加,圓柱迴流區大小及渦流尺度有增大之趨勢,但上游 流速增加也造成擾動頻率與擾動量之增加,如圖 3-6 案例 C3 之 Z4渦度場所 示,除了圓柱後方之渦流外,流場中還存在許多小尺度之渦流,顯示流場 變化劇烈。 以案例 C1 之 Z1為例說明渦流脫離之過程及圓柱尾流擺盪現象,圖 3-7 與圖 3-8 之(a)至(f)圖為一連續時間之速度向量與渦度場變化圖,(a)至(f)各 圖時間間距為 0.06 秒。在(a)及(b)圖中顯示上方渦流將脫離圓柱迴流區,而 下方渦流因剪力層與迴流區之速度差異,使剪力層持續向內捲曲,渦流大 小隨著時間擴大,推擠上方渦流,而上下渦流分離瞬間,流體會立即穿過 兩者之間,加速推動上方渦流脫離圓柱迴流區向下游移動;此時,圓柱迴 流區下游處 X/D=4 之中心軸速度向量,將隨著上方渦流向下游移動的過程 中,由向下之速度向量分布轉為向上,形成尾流向上擺動之現象。而(c)及
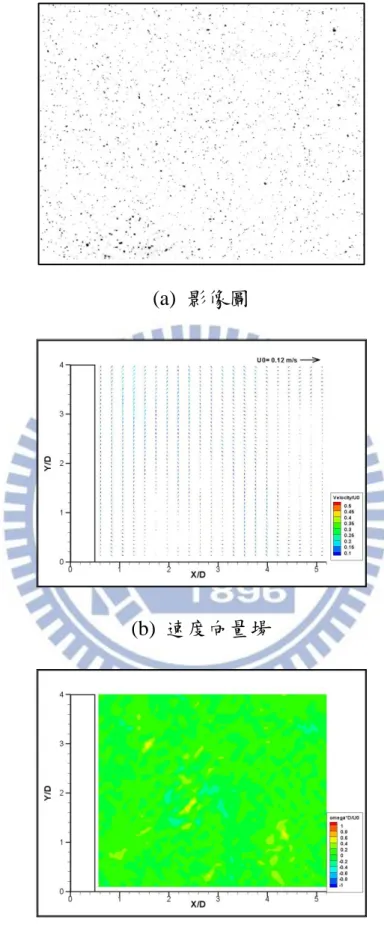
(d)圖顯示,上方渦流脫離後,圓柱迴流區上方重新生成另一個渦流,推擠 下方渦流脫離圓柱迴流區,向下游移動,X/D=4 之中心軸速度向量分布亦 隨之轉為向下,形成尾流向下擺動之現象,直到上方渦流進行下一次脫離, 尾流將再次向上擺動,如圖(e)、(f)所示。如此反覆,形成上下渦流交替脫 離現象,尾流亦隨之上下擺盪,故其擺盪頻率即為渦流脫離頻率,而交替 脫離之渦流彼此相鄰排列向下游移動,形成馮卡門渦列(von Kaman vortex street)。單一圓柱試驗結果顯示 PIV 量測技術,能清楚呈現圓柱後方渦流於 空間上分布之情形及渦流脫離之過程。 3.2 單一背向階梯流場量測結果 單一背向階梯試驗案例 H11 至 H33,分別為高度 1 公分、2.5 公分及 5 公分之階梯於固定流量 0.002、0.003 及 0.004 cms (福祿數 Fr 為 0.17、0.24 及 0.30)流況條件下進行,並沿水深方向分為 5 層水平面 Z5至 Z9進行量測。 因背向階梯迴流流場係屬於垂直二維之渦流結構,以水平面流場量測結果 無法完整呈現階梯迴流區之渦流結構及迴流運動,但此試驗主要目的是為 了瞭解在無設置圓柱之情況下,背向階梯流場之分佈情形,作為圓柱與階 梯組合試驗之比較依據,故以水平面流場量測為主。 圖 3-9 至圖 3-35 依序為試驗案例 H11 至 H33 背向階梯流場各量測平面 之擷取影像、速度向量分佈及渦度場,於圖中左方空白處為階梯位置。由 各層量測結果發現背向階梯流場被分為兩區塊,其中靠近階梯垂直壁面之
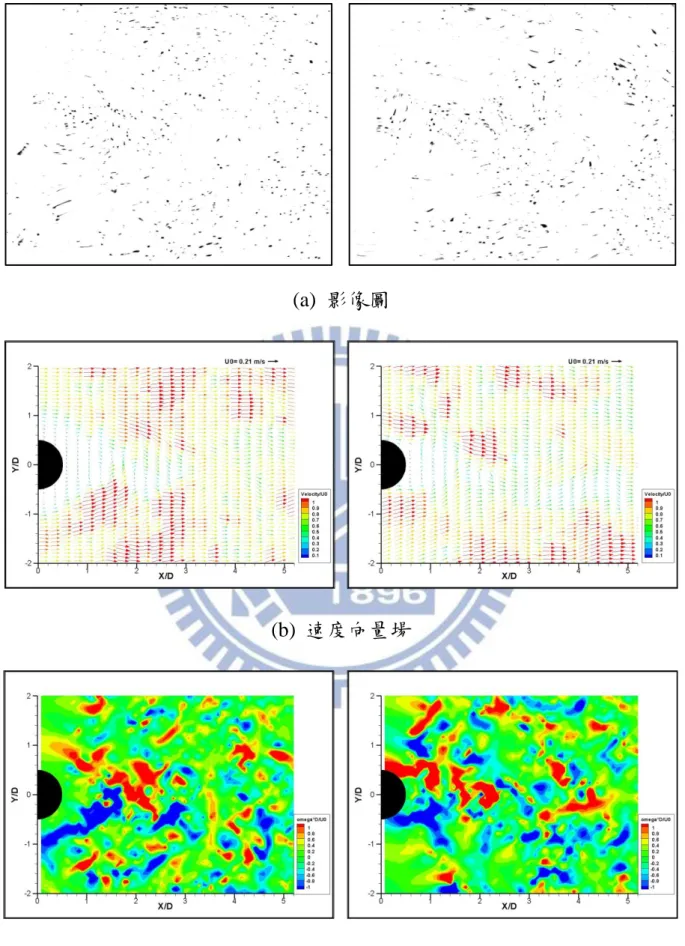
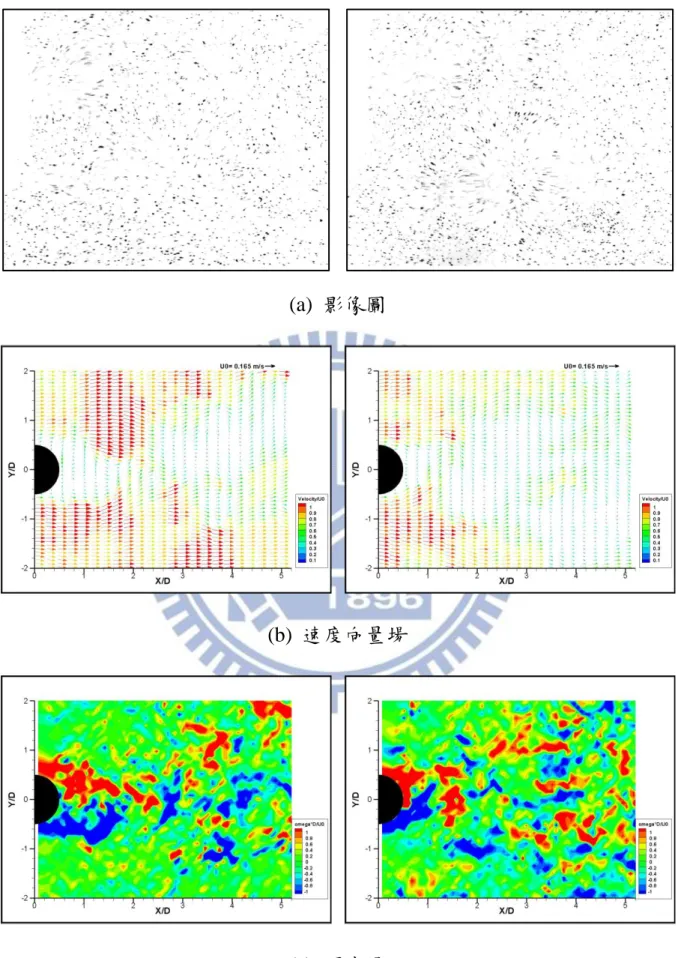
46 區域流速較低、渦度較小,流體朝階梯方向流動,係為階梯之迴流區,其 範圍大小越接近階梯底部越大,在案例 H21 至 H33 中,其範圍甚至涵蓋整 個量測區域,如圖 3-20 所示;另一塊區域則為階梯之剪力層與自由流所形 成,以射流方式進入階梯流場,流速較快,流體朝下游方向流動,渦度較 強的地方亦發生於此區,故背向階梯流場量測結果呈現高流速之自由流與 低流速之迴流區組合之流場型態。 3.3 階梯與圓柱組合試驗 階梯與圓柱組合試驗案例 CH11 至 CH33,分別為高度 1 公分、2.5 公 分及 5 公分之階梯於固定流量 0.002、0.003 及 0.004 cms(福祿數 Fr 為 0.17、 0.24 及 0.30)流況條件下進行,並沿水深方向分為 9 層水平面進行量測,將 量測結果分為圓柱尾流及背向階梯流場兩部份進行說明。 3.3.1 階梯與圓柱組合試驗之圓柱尾流流場量測結果 圖 3-36 至圖 3-53 為案例 CH11 至 CH33 之 Z1至 Z4量測平面之擷取影 像、速度向量分佈及渦度場。整體而言,量測結果顯示各案例之渦流型態 與單一圓柱之渦流相比較不完整,且由速度向量場結果發現下游面中心軸 Y/D=0 附近普遍存在一低速區,使脫離圓柱之渦流向下游移動時,有往兩 側偏移之現象,如圖 3-36 案例 CH11 之 Z1所示,下游兩側之渦流並非緊密 前後排列,而是分散於兩側,與單一圓柱之馮卡門渦列型態明顯不同。 此外,越接近階梯,低速區範圍將向圓柱方向擴大,影響圓柱渦流發
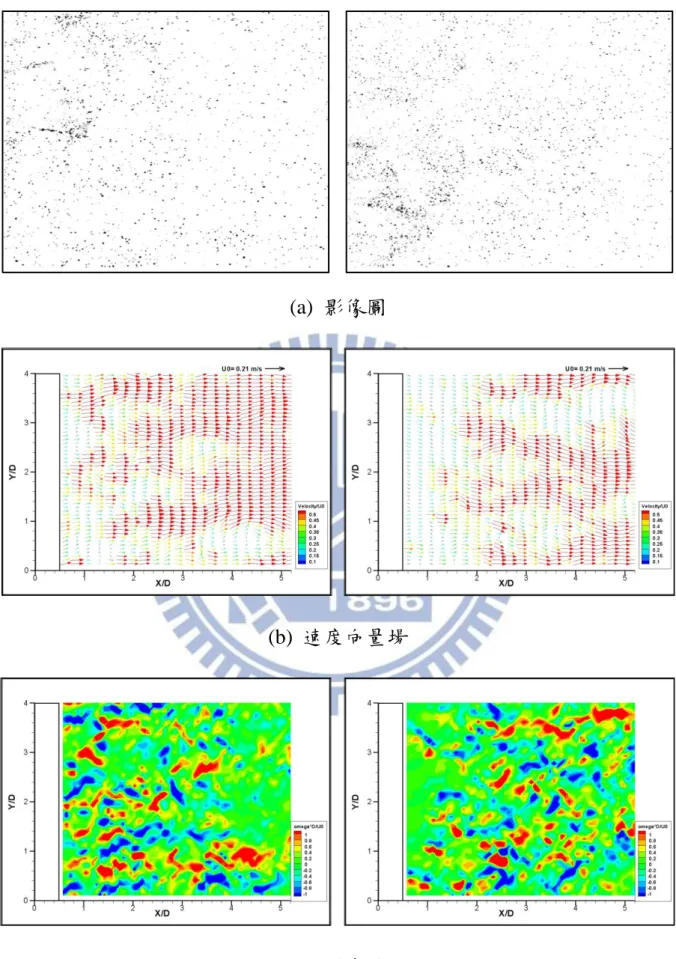
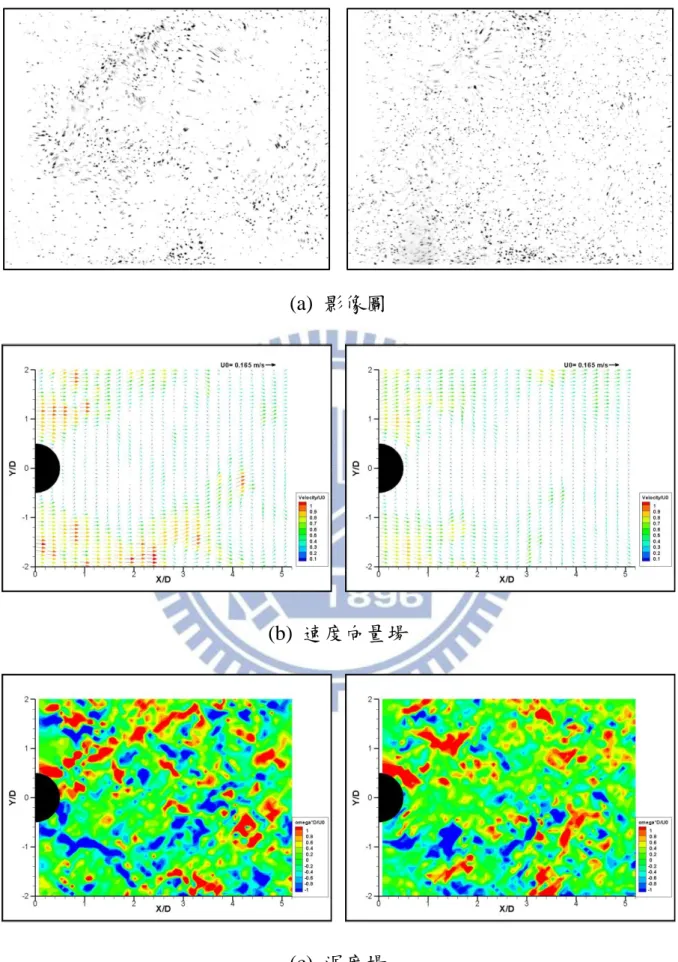
展,使渦流偏移現象越明顯,圓柱尾流流場也越顯紊亂,不易發覺尾流擺 盪現象。當其範圍擴大至圓柱後方迴流區後,使圓柱兩側剪力層無法閉合 包覆圓柱迴流區,並往圓柱左右兩側偏斜,如圖 3-37 案例 CH11 之 Z4所示。 3.3.2 階梯與圓柱組合試驗之背向階梯流場量測結果 圖 3-54 至圖 3-80 為案例 CH11 至 CH33 之 Z5至 Z9量測平面之擷取影 像、速度向量分佈及渦度場,於圖中左方空白處為階梯,虛線範圍代表圓 柱對應之位置。在階梯上部分 Z5至 Z6之流場量測結果顯示,在 Y/D=0 至 2 的範圍內,渦度普遍較小,與外側之剪力層與自由流區相比,流速較緩慢 並朝階梯方向流動,其範圍沿下游向外擴張,影響外側之自由流區,渦度 較大的地方亦發生在兩者之交界處,如圖 3-60 案例 CH13 之 Z6所示;而階 梯下部分 Z7至 Z9之流場量測結果則與上部分相反,如圖 3-70 案例 CH23 之 Z8所示,於 Y/D=0 至 2 之範圍內流速反較外側快,渦度較大的地方則多 發生於此範圍內。 對於背向階梯流場產生此逆流現象之原因,主要係由於在階梯上設置 圓柱後,阻擋水流直接進入階梯迴流區,使圓柱後方的階梯流場形成一低 速帶,再由圓柱兩側之渦流捲入流體進入該低速區,推動低速區之流體朝 階梯方向流動,而形成一股逆向水流。逆向水流影響接近階梯之圓柱尾流 流場,造成低速區之存在,產生渦流向兩側偏移之現象,亦使階梯下部分 迴流區內流體速度增加。
48 (a) 影像圖
(b) 速度向量場
(c) 渦度場
(a) 影像圖
(b) 速度向量場
(c) 渦度場
50 (a) 影像圖
(b) 速度向量場
(c) 渦度場
(a) 影像圖
(b) 速度向量場
(c) 渦度場
52 (a) 影像圖
(b) 速度向量場
(c) 渦度場
(a) 影像圖
(b) 速度向量場
(c) 渦度場
54 (c) t /T =3 /6 (f) t/ T = 6 /6 圖 3 -7 案例 C1 之 Z1 速度 向量變 化圖 (b ) t /T = 2 /6 (e) t /T =5 /6 (a) t /T =1 /6 (d ) t /T = 4 /6
(c) t /T =3 /6 (f) t/ T = 6 /6 圖 3 -8 案例 C1 之 Z1 渦度 場變化 圖 (b ) t /T = 2 /6 (e) t /T =5 /6 (a) t /T =1 /6 (d ) t /T = 4 /6