風能-小水力混合式感應發電系統發生短路故障的動態特性分析
林錦章1、陳盟仁2、蔡明宏2、劉國才3 1.金陽機電工程有限公司 2.國立高雄應用科技大學電機工程系 3.台灣電力公司高屏供電區 E-mail: [email protected]摘 要
本論文主要在探討風能-小水力混合式感應發電系統在系統故障情形下的動態特性。研究對象為一個風能 -小水力混合式感應發電系統,這個系統的組件包括水輪機與調速系統、風力機、感應發電機、三相變壓器、 功因補償電容器、以及靜態負載等。研究方法是利用Simulink 與架構在同一環境下的 SimPowerSystems 來開 發系統組件模組,再將這些模組依系統架構連結,接著進行動態特性模擬與分析。模擬結果顯示,在這種運 轉模式下系統的動態特性是可以接受的並且應可和實際運轉情形一致。此研究最大的價值是可以做為此類型 系統規劃、運轉、以及擴充的重要依據。 關鍵詞:風能-小水力混合式感應發電系統、動態特性分析、水輪機、風力機、感應發電機。1. 前 言
根據民國 94 年「第二次全國能源會議」結論,我國將研訂二氧化碳管制機制,至 2015 年底減少 3,800 萬公噸,2020 年減少 5,868 萬公噸,2025 年減少 7,841 萬公噸;再生能源推廣利用 2010 年裝置容量達 5,130MW, 2020 年達 7,000~8,000MW,2025 年達 8,000~9,000MW,以達成總裝置容量占比 12%為目標,或能源結構占 比4~6%;推廣再生能源開發利用,包括生質能、風力、太陽光電、太陽熱能、氫能及燃料電池、海洋能、地 熱等;規畫具經濟規模之陸域或海上風力站以及扶植國內風能發電產業發展[1]。此外,民國 98 年「全國能源 會議」,在能源科技發展、能源產業發展與配套基礎設施、以及能源科技人才培育等三大領域的具體推動政策 上達成了多項共識[2]。 根據統計,全球在再生能源發電方式中,風能發電的潛力相當雄厚。在風能發電方面,根據IEA 的統計, 至2009 年底,全球風能發電裝置容量約為 120.8GW,近十二年的平均成長率達到 28%[3]。此外,在小水力 發電方面,根據世界能源委員會(WEC)調查報告顯示,全世界小水力發電(僅統計裝置容量 10MW 以下)的潛 力為70,857MW[4]。 在風能-小水力混合式發電系統相關文獻方面,Karlis 等人利用軟體模擬一個風能-小水力-太陽能-柴油引 擎混合式發電系統的動態特性並且實驗證實結果的合理性[5]。Fan 等人介紹利用軟體模擬風能-小水力混合式 發電系統穩定度的方法,並且研究了一個位於中國新疆的風能-小水力混合式發電系統的穩定度[6]。Soder 提 出一種用於分析風能-水力-熱能混合式電力系統備轉容量的方法[7]。Contaxis 等人提出一個用來計算包括風能 和抽蓄式發電系統的大型系統中最佳電力潮流分佈的方法[8]。Castronuovo 等人利用儲水系統來改善風能發電 系統運轉的經濟性並且減少風速不佳時無效功率變動的情形[9]。Pandiaraj 等人利用一種有效的頻率及電壓感 測裝置來對風能和小水力等系統進行負載控制而達到較佳的穩定度[10]。Blaabjerg 等人針對電力電子裝置在 再生能源發電系統如風能和小水力等的應用做總體介紹[11]。 本論文主要在探討風能-小水力混合式感應發電系統在短路故障情形下的動態特性。本研究最大的價值是 ©2010 National Kaohsiung University of Applied Sciences, ISSN 1813-3851風能-小水力混合式感應發電系統發生短路故障的動態特性分析 789
可做為系統規劃、運轉、以及系統擴充的重要參考。
2. 風能-小水力混合式感應發電系統模組開發與應用
2.1 風能-小水力混合式發電系統架構
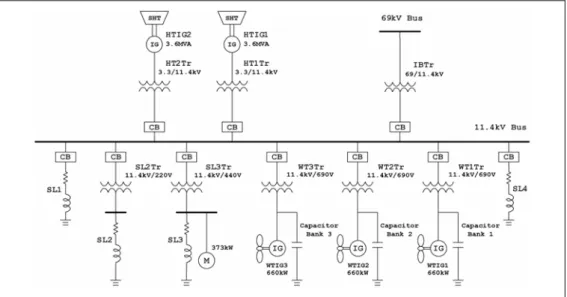
圖1 為一個風能-小水力混合式感應發電系統的架構,此系統的組件包括水輪機(Hydraulic turbine)、風力 機(Wind turbine)、 感 應 發 電 機 (Induction generator)、 變 壓 器 (Power transformer) 、 功 因 補 償 電 容 器 組 (Pf compensation capacitor bank)、以及集總的靜態負載(Lumped static load)。
圖1 風能-小水力混合式感應發電系統架構
2.2 軟體工具
本論文的模擬是利用建構在MATLAB 環境下的模擬軟體 Simulink 來完成的。在 Simulink 環境下有許多 不同領域的工具箱,例如電力系統工具箱(SimPowerSystems)、航空學工具箱(Aerospace Blockset)、數位訊號 處 理 工 具 箱(DSP Blockset) 、 通 訊 系 統 工 具 箱 (Communications Blockset)、 模 糊 邏 輯 工 具 箱 (Fuzzy Logic Toolbox)、神經網路工具箱(Neural Network Blockset)等可運用在許多的動態模擬[12]。本論文主要是使用 SymPowerSystems,在該工具箱中內建了許多常用的電力系統模組,可以方便的運用在電力系統的各種動態模 擬[13]。此外,該工具箱也可以與使用者自行開發的模組相容,以滿足各種不同模擬的需求[14,15]。 2.3 基本模組 2.3.1 水輪機與調速器模組 圖 2 為製造商實際測試得到的小水力輪機特性曲線,此特性曲線會因水輪機機型而不同。依據此特性曲 線,利用迴歸分析的方法,轉換成多項式型式後,便可建立成模組,如圖 3 所示。此模組的輸入為轉速,輸 出為轉矩,屬於開迴路控制方式,較適用於感應發電系統架構[16,17]。
圖2 小水力輪機的輸出特性曲線 圖3 小水力輪機功率特性模組圖像與參數視窗 2.3.2 風力模組與風力機功率特性模組 風力模組主要目的是將風速以模組方式呈現出來。圖4 為風力模組的圖像及參數視窗。只要輸入適當的 參數即可產生隨機的風速,做為風力機功率特性模組的輸入。接著,利用迴歸分析法將風力機的特性曲線轉 換成代數方程式後,即可建立成模組供模擬使用[18,19]。 圖4 風力模組圖像與參數視窗
風能-小水力混合式感應發電系統發生短路故障的動態特性分析 791
2.3.3 三相感應發電機模組
圖5 為三相感應發電機模組圖像與參數視窗。輸入端 A、B、C 為定子三相電壓,輸出端 a、b、c 為轉子 側接點,Tm 為輸入機械轉矩,m 為輸出資料端,可連接到量測元件。此模組可依感應發電機型式而設定不同 的參數,包括轉子型式(Rotor type)、參考軸(Reference frame)、感應電機額定容量(Pn)、線電壓(Vn)、頻率(fn)、 定子電阻(Rs)、定子漏電感(Lls)、轉子電阻(Rr’)、轉子漏電感(Llr’)、磁化電感(Lm)、慣量常數(H)、機械阻尼 係數(F)、極對(p)、以及初始條件(Initial conditions)[20,21]。 圖5 三相感應發電機模組圖像與參數視窗 2.3.4 三相變壓器模組 三相變壓器模組可選擇各種結線方式,包括Δ-Δ、Y-Δ、Δ-Y、Y-Y、Yn-Δ、Δ-Yn、Yn-Y、Y-Yn 等幾種。 圖6 為三相變壓器模組圖像與參數視窗。輸入端 A、B、C 為變壓器一次側三相電壓,輸出端 a、b、c 為二次 側三相電壓。此模組的參數包括額定容量(Pn)、頻率(fn)、一次側繞組結線方式(Winding 1 connection)、一次 側繞組線電壓(V1 Ph-Ph)、一次側繞組電阻(R1)、一次側繞組漏電感(L1)、二次側繞組結線方式(Winding 2 connection)、二次側繞組線電壓(V2 Ph-Ph)、二次側繞組電阻(R2)、二次側繞組漏電感(L2)、磁化電阻(Rm)、 以及磁化電感(Lm)[20,21]。 圖6 三相變壓器模組圖像與參數視窗
2.3.5 功因補償電容器模組 圖7 為功因補償電容器模組圖像與與參數視窗。輸入端 A、B、C 為三相電壓。此模組的參數包括額定線 電壓(Vrms)、額定頻率(fn)、電阻性負載(P)、電感性負載(Ql)、以及電容性負載(Qc)。 圖7 功因補償電容器模組圖像與參數視窗 2.3.6 靜態負載模組 圖 8 為靜態負載模組圖像與與參數視窗。輸入端 A、B、C 為三相電壓。此模組的參數包括額定線電壓 (Vrms)、額定頻率(fn)、電阻性負載(P)、電感性負載(Ql)、以及電容性負載(Qc)。 圖8 靜態負載模組圖像與參數視窗
3. 三相短路故障模擬與分析
3.1 模擬程序 動態模擬的第一個步驟是確認系統架構。系統架構可以是實際運轉的系統、經由專家如電機技師認可的 系統、或是學理上的系統,因為研究這幾種系統都有不同的意義。第二個步驟是確定要觀察的系統變數。第 三個步驟是整理系統組件的參數。第四個步驟是規劃模擬項目,亦即,系統的運轉模式。第五個步驟是開發 模組並且進行模擬。第六步驟是整理模擬結果並且加以評論。風能-小水力混合式感應發電系統發生短路故障的動態特性分析 793 3.2 SimPowerSystems 模組架構 圖9 為使用SimPowerSystems 開發的模組,主要包括四部分-A 部分為 69kV 電源與變壓器,B 部分為三 套風能發電系統與一個負載,C 部分為兩套小水力感應發電系統,D 部分為三個負載。 3.3 時序圖 圖10 為三相短路故障模擬的時序圖。由圖中可看出系統組件依時間序加入,25 秒時在 11.4kV 匯流排發 生三相短路故障,25.3 秒時故障排除,總模擬時間為 30 秒。 圖9 風能-小水力混合式感應發電系統動態模擬 SimPowerSystems 模組架構圖 圖10 三相短路故障運轉模擬的時序圖
3.4 模擬結果 圖11~12 為三相短路故障模擬系統變數變動的情形,所有的變數都以個別組件的容量為標么基底表示。 由模擬結果可看出,故障發生前,隨著負載的加入11.4kV 匯流排以及變壓器的電壓,會隨著負載的加入 而有程度不同的暫態響應,暫態的大小和持績時間與組件的容量以及參數有關。另外,由模擬結果也可看靜 態負載的電壓、電流、實功率、以及虛功率都受到匯流排電壓變動的影響。此外,小水力感應發電系統會供 應實功率給大型系統並且從大型系統吸收虛功率,功率因數約為0.9;雖然兩部感應發電機的容量相同,但是 輸出功率的設定卻不同,一部是 0.9pu,另一部是 0.8pu。同樣地,風能感應發電系統也供應實功率給大型系 統並且從大型系統吸收虛功率,功率因數約為0.95。三部風力機的風速不同,使得輸出功率也不同。 故障發生時,IBTr 的二次側,亦即 11.4kV 匯流排,電壓降為 0,一次側的電流高達 14pu。由於匯流排電 壓降為 0,導致所有系統組件的實功率和虛功率都明顯的減少。小水力感應發電系統則由於端電壓的下降導 致電磁轉矩減少,使得感應發電機的轉速上升到約1.1pu。同様的情形也發生在風能發電系統。故障排除後, 系統組件都有明顯的暫態發生。 風能-小水力感應發電系統在這種運轉模式下的動態特性都是合理的。然而,在實際的運轉中,負載加入 的情形不一定會如此緊湊,因此系統響應可能會較緩和。此外,由於短路故障模擬的觀察重點在於故障發生 所造成的暫態現象以及故障排除後的行為,所以故障時間設定為 0.3 秒。在實際的系統運轉中,故障持續時 間會因保護電驛的設定而不同,系統組件的切離會因保護協調的安排而不同,故障造成的影響也會因故障時 間點、接地阻抗、以及系統組件參數而不同。
4. 結 論
本論文主要在探討風能-小水力混合式感應發電系統在系統故障情形下的動態特性。研究結果顯示在風能 發電系統中,當感應發電機的轉速超過同步速度時,實功率會從發電機端流向電源端,虛功率則是由電源端 流入發電機端,因此適當的功因補償是必要的。相同的情形也發生在小水力感應發電系統中。此外,風能發 電系統的輸出功率受風速的影響很大,本研究中三部風力機的風速都不相同,使得發電機的輸出功率都不同。 然而,小水力感應發電系統卻可經由水閘門的控制而得到較穩定的輸出功率。故障發生時,所有系統組件的 實功率和虛功率都明顯的變化。小水力感應發電系統則由於端電壓的下降導致電磁轉矩減少,使得感應發電 機的轉速上升。風能發電系統的情形類似。故障排除後,系統組件都有明顯的暫態發生,最後趨於穩定。整 體而言,風能-小水力混合式感應發電系統在這種運轉模式下的動態特性是合理的並且應可和實際運轉情形一 致。本研究最大的價值是可以做為系統規劃、運轉、以及擴充的重要依據。參考文獻
[1] 第二次全國能源會議結論報告, 2005 年 6 月。 [2] 98 年全國能源會議總結報告, 2009 年 4 月。[3] IEA, Wind Energy Annual Report 2008, IEA, August 2009.
[4] Website,http://www.worldenergy.org/wec-geis/publications/reports/ser/hydro/hydro.asp Karlis and P. Dokopoulos, “Small power systems fed by hydro, photovoltaic, wind turbines and diesel generators,” ICECS '96, Vol. 2, pp.1013-1016, Oct 1996. [5] Fan, Y., Wand, Y. and Chao, Q., “Wind-hydro hybrid power system stability analysis,” ICEMS 2001, Vol. 1, pp.628-632, Aug.
2001.
[6] Soder, L., “Reserve margin planning in a wind-hydro-thermal power system,” IEEE Transactions on Power Systems, Vol. 8, Issue 2, pp.564-571, May 1993.
[7] Contaxis, G. and Vlachos, A. , “Optimal power flow considering operation of wind parks and pump storage hydro units under large scale integration of renewable energy sources,” IEEE Power Engineering Society Winter Meeting, Vol. 3, pp.1745-1750, Jan. 2000.
[8] Castronuovo, E.D. and Lopes, J.A.P., “On the optimization of the daily operation of a wind-hydro power plant,” IEEE Transactions on Power Systems, Vol. 19, Issue 3, pp.1599–1606, Aug. 2004.
風能-小水力混合式感應發電系統發生短路故障的動態特性分析 795
Transactions on Energy Conversion, Vol. 16, Issue 1, pp.14-19, March 2001.
[10] Blaabjerg, F., Chen, Z. and Kjaer, S.B., “Power electronics as efficient interface in dispersed power generation systems,” IEEE Transactions on Power Electronics, Vol. 19, Issue 5, pp.1184-1194, Sept. 2004.
[11] Using Simulink, The Mathworks Inc., 2005.
[12] SimPowerSystems User’s Guide, Hydro-Quebec TransEnergie International, 2005. [13] 許孟哲,「風能發電系統動態分析」,國立高雄應用科技大學碩士論文,2004。 [14] 王允成,「小水力發電系統動態分析」, 國立高雄應用科技大學碩士論文,2005。
[15] IEEE Committee Report, “Dynamic models for steam and hydro turbines in power system studies,” IEEE Transactions on Power Apparatus and Systems, PAS-92, pp.1904-1914, 1973.
[16] IEEE Working Group on Prime Mover and Energy Supply Models for System Dynamic Performance Studies, “Hydraulic Turbine and Turbine Control Models for Dynamic Studies”, IEEE Transactions on Power Systems, Vol.7, pp.167-179, 1992. [17] Manwell, J. F., Wind Energy Explained, John Wiley& Sons Ltd., May 2002.
[18] Burton, T., Sharpe, D., Jendkins, N. and Bossanyi, E.,Wind Energy Handbook, John Wiley& Sons Ltd., December 2001. [19] Krause, P.C.,Analysis of Electric Machinery and Drive System, 2nd Ed, McGRAW-Hill Book Co., USA, Dec 2001. [20] C. M. Ong, Dynamic Simulation of Electric Machinery using MATLAB/Simulink, McGRAW-Hill Book Co., USA, 1998.
(a) IBTr 的一次側實功率 (f) SL2 的虛功率 (k) SL4 的平均電壓 (b) IBTr 的一次側虛功率 (g) SL3 的實功率 (l) SL4 的 A 相電流 (c) SL1 的實功率 (h) SL3 的虛功率 (m) 電動機的轉矩 (d) SL1 的虛功率 (i) SL4 的實功率 (n) 電動機的轉速 (e) SL2 的實功率 (j) SL4 的虛功率 (o) 電動機的 A 相電流 圖11 IBTr、SL1~SL4 與電動機的變數變動情形
風能-小水力混合式感應發電系統發生短路故障的動態特性分析 797
(a) HT1 的輸出功率 (f) HTIG2 的轉矩 (k) WTIG2 的轉速
(b) HTIG1 的轉矩 (g) HTIG2 的轉速 (l) WT1 的輸出功率
(c) HTIG1 的轉速 (h) HTIG2 的 A 相電流 (m) WT2 的輸出功率
(d) HTIG1 的 A 相電流 (i) WT1 的風速 (n) WT3 的輸出功率
(e) HT2 的輸出功率 (j) WT2 的風速 (o) WTIG3 的轉速 圖12 ISHP1、ISHP2、WECS1、WECS2 與 WECS3 的變數變動情形
![圖 2 小水力輪機的輸出特性曲線 圖 3 小水力輪機功率特性模組圖像與參數視窗 2.3.2 風力模組與風力機功率特性模組 風力模組主要目的是將風速以模組方式呈現出來。圖 4 為風力模組的圖像及參數視窗。只要輸入適當的 參數即可產生隨機的風速,做為風力機功率特性模組的輸入。接著,利用迴歸分析法將風力機的特性曲線轉 換成代數方程式後,即可建立成模組供模擬使用[18,19]。 圖 4 風力模組圖像與參數視窗](https://thumb-ap.123doks.com/thumbv2/9libinfo/8765845.209630/3.892.102.663.66.688/小水力輪機小水力輪入適即可產生隨機風速做為風力機功率特性模.webp)

