國立高雄大學電機工程學系(研究所)
碩士論文
多軸機器手臂種苗培育及成長辨識系統之研究
Multi Axis Arms Robot System for Seeding and Growth
Identification
研究生:林宥序撰
指導教授:施明昌博士
共同指導教授:張法憲博士
ii
誌謝
從二技畢業後至今以過十餘載,要再度回歸學生身分拾起書本唸書時後真的很掙 扎,但最終還是完成了這個使命;感謝高大的精心安排課程讓我可以吸收到其中的知識 精髓所在,使我的知識倍增許多。 終於完成了論文了,感謝學校教授及助理小姐的細心的指導與幫忙讓學生可以順 利畢業。 謝謝施明昌教授,在求學期間課業上碰到問題時的協助、解惑、引導到正確答案 的方向讓問題可立即迎刃而解。 感謝我的論文指導教授張法憲老師,從一開始的論文課程安排、相關議題課程訓 練、到論文資料收集與論文編寫邏輯流程…等一步一步的教導,讓學生在編寫論文過程 中有所磨練,在思考問題與先前有所不同見解、對問題的頗悉從”是”與”非”兩個答 案晉升到有多重解的階段,這些成長讓學生在求學期間受益良多。 感謝公司的主管和同事們,有您的體量讓我在課業學習之路有所成長,工作上較 忙時可以協助與幫忙,替我多分擔解勞讓我課業與工作可以同時兼顧。 感謝一起上課的同班同學們,大家一路相互扶持在碰到課業問題時大家可以一起 套討解決共同完成學校老師交附的任務與作業,大家繼續加油。 感謝我們最親愛的家人們,除了白天上班、夜晚上課有時還要再利用到假日時間 每日早出晚歸,與家人相聚活動都無法參與,陪伴家人時間變的少之又少,謝謝您,您 是我最強大的後盾與前進的動力。iii
多軸機器手臂種苗培育及成長辨識系統之研究
指導教授:施明昌博士 國立高雄大學電機工程系 共同指導教授:張法憲博士 正修科技大學電子工程系 學生:林宥序 國立高雄大學電機工程學系 中文摘要 本論文主要探討智慧農業中以具多軸式移動平台結合視覺影像辨識系統與後端系 統,來完成一種適用於植物幼苗成長影像辨識管理系統。多軸平台中包括有 XYZ 平台、 夾取結合座、挖掘棒、抽水馬達、縱向移動等系統,用以在育苗盆中翻土、種植、覆土 與澆水;視覺辨識:包括有影像擷取及電腦運算,用以監控植物生長期行;後端管理系 統:使用 Arduino 晶片整合操作視覺辨識,辨識農作物的成長程度,進而進入管理系統, 整合以上系統可以詳細監控作物幼苗成長,並將其歸類以利後端出貨作業。此外詳細的 多軸移動平台運作架構、影像辨識管理系統、將光電系統整合技術,在本論文中均有詳 細的描述。 關鍵詞:智慧農業、農業 4.0、自動化控制、多軸手臂、影像辨識。iv
Multi Axis Arms Robot of Seedling Cultivation And
Growth Identification System
Advisor(s): Dr. Ming-Chang Shih Institute of Department Electrical Engineering
National University of Kaohsiung
Advisor(s): Dr. Fa-Shian Chang Institute of Department Electronics
Cheng Shiu University
Student: YU-HSU Lin
Institute of Department Electrical Engineering National University of Kaohsiung
ABSTRACT
This thesis mainly discusses a multi-axis mobile platform combined with visual image Identification system and back-end management system in smart agriculture, and management system can identify seedling growth by image Identification management system. There are XYZ platform, a clamping joint, a digging rod, a pumping motor, and a longitudinal movement system at the multi-axis platform. The use image capture and computer operations with stir the subsoil, planting, covering and watering in nursery pots. The monitor plant growth period and back-end management system are use Arduino's chip IC
v
integration operation visual identification and identify the growth degree of crops, and then into the management system to monitor crop seedling growth in detail, and classify it for the back-end shipments. In addition, the detailed multi-axis mobile platform operation architecture, image recognition management system, and optoelectronic system integration technology are described in detail in this paper.
Keywords: Smart agriculture, Agriculture 4.0, Automated control, Multi-axis arm, Image recognition.
vi
目錄
口試委員會審定書... i 誌謝... ii 中文摘要...iii 英文摘要... iv 第一章 緒論... 1 1.1 前言... 1 1.2 研究動機與目的... 2 1.3 相關發展與文獻資料之分析... 4 1.4 市場概況... 9 第二章 農業技術探討與研究... 12 2.1 台灣農業的發展... 12 2.2 台灣的智慧農業... 13 2.3 農業機器人分類... 13 2.4 農作物成長條件... 14 2.5 論文架構... 18 第三章 感測元件運用... 20 3.1 感測元件概論... 20 3.2 溫度感測器元件... 20 3.3 濕度感測器元件... 21 3.4 光感測器元件... 23 3.5 機器視覺影像處理基礎... 24 第四章 主機架構設計與應用... 26 4.1 硬體架構... 26vii 4.2 單板電腦... 28 4.3 ARDUINO 單晶片微控制器 (馬達控制器) ... 32 4.4 步進馬達... 35 4.5 真空泵( Vacuum pump ) ... 38 4.6 抽水馬達... 39 4.7 USB 攝影鏡頭 ... 40 4.8 UTM 工具 ... 41 4.9 土壤濕度感測器... 43 4.10 元件架構圖/接點圖 ... 45 4.11 機構骨架組裝... 45 第五章 軟體設計說明... 51 5.1 單板電腦作業系統安裝... 51 5.2 SD Memory Card 格式化 ... 51 5.3 硬體機構設定... 52 第六章 實驗設計與分析... 59 6.1 整體規格... 59 6.2 種植步驟... 59 6.3 植物成長變化... 60 6.4 小白菜實際成長紀錄... 60 6.5 成長辨識系統... 61 6.6 植物成長辨識測試與紀錄... 61 第七章 結論及未來展望... 64 參考文獻... 65
viii
圖目錄
圖 1- 1 智慧農業研討會模擬開發實現 ... 2 圖 1- 2 AI / IOT / 自動化關係 ... 3 圖 1- 3 世界各國耕地面積占國土總面積比例示意圖(數字單位為百分比) .. 4 圖 1- 4 美國農業作業情形 ... 5 圖 1- 5 德國農業作業情形 ... 6 圖 1- 6 日本的環保農業 ... 7 圖 1- 7 中國雨量分佈圖 ... 7 圖 1- 8 中國的 IOT 農業 ... 8 圖 1- 9 台灣的農會策略聯盟 ... 9 圖 2- 1 農業中的物聯網 ... 12 圖 2- 2 農業產業上機器人 - 底盤分類 ... 13 圖 2- 3 農業產業上機器人 - 工作單元分類 ... 14 圖 2- 4 植物的光合作用 ... 15 圖 2- 5 光譜圖 ... 15 圖 2- 6 植物水分吸收與輸送 ... 17 圖 2- 7 農作物生長的重要因子 ... 18 圖 2- 8 論文探討架構 ... 18 圖 2- 9 自動種苗撥種與成長辨識系統 架構圖 ... 19 圖 2- 10 農作物成長感測器架構 ... 19 圖 3- 1 熱敏電阻通用符號 ... 20 圖 3- 2 熱敏電阻外型 ... 21 圖 3- 3 熱敏電阻曲線 ... 21 圖 3- 4 電容聚合物濕度感測器結構圖 ... 22ix 圖 3- 5 電容聚合物濕度感測器相對濕度響應曲線 ... 22 圖 3- 6 光敏電阻的外型與電路符號 ... 23 圖 3- 7 光敏電阻的光電特性曲線 ... 24 圖 3- 8 機器視覺系統組織圖 ... 25 圖 4- 1 多軸機器手臂種苗培育及成長辨識系統外型 ... 26 圖 4- 2 機構外型與部件名稱 ... 27 圖 4- 3TOP 10 單板電腦排行榜 (主流單板電腦) ... 29 圖 4-4 RASPBERRY PI 3MODEL B+ ... 29 圖 4- 5 RASPBERRY PI 3 的外觀 ... 30 圖 4-6 RASPBERRY PI 3MODEL B 外型尺寸圖 ... 31 圖 4-7 RASPBERRY PI 3MODEL B 接點說明圖 ... 31 圖 4- 8 馬達控制器 ... 32 圖 4- 9 馬達控制器尺寸圖 ... 33 圖 4- 10 馬達控制器接點功能圖 ... 35 圖 4-11 馬達控制器 (ARDUINO MEGA 2560 擴充模組) ... 35 圖 4- 12 步進馬達的控制 ... 36 圖 4- 13 步進馬達的轉系統組成的 3 要素 ... 36 圖 4- 14 步進馬達的步級角度 ... 36 圖 4- 15 步進馬達的步進角 ... 37 圖 4- 16 步進馬達的 VS、TR、VO此三者的關係 ... 37 圖 4- 17 步進馬達 42B4004T ... 38 圖 4- 18 真空幫浦 ... 39 圖 4- 19 抽水馬達 ... 39 圖 4- 20 USB 攝影鏡頭 ... 40 圖 4- 21 UTM 工具外型 ... 41 圖 4-22 UTM 外觀尺寸三視圖 ... 42
x 圖 4-23 UTM 母座線路接點圖 ... 42 圖 4- 24 UTM 母座控制器 ... 43 圖 4-25 土壤濕度感測器外型 ... 44 圖 4-26 土壤濕度感測器接線圖 ... 44 圖 4-27 土壤濕度感測器內部線路圖 ... 45 圖 4- 28 元件架構圖/接點圖 ... 45 圖 4- 29 龍門組裝圖 ... 46 圖 4-30 XY 軸組裝圖 ... 47 圖 4-31 Z 軸組裝圖 ... 48 圖 4-32 機構線材 ... 49 圖 4-33 機構組裝完成圖 ... 50 圖 5- 1 RASPBIAN 作業軟體最新版本 ... 51
圖 5- 2 SDMEMORYCARDFORMATTER 格式化軟體 ... 51
圖 5- 3 SDMEMORYCARD 資料進行卸除畫面 ... 52 圖 5- 4MINIFARMBOT 網站下載軟/硬體操作應用畫面 ... 52 圖 5- 5 樹梅派單板電腦開機後畫面 ... 53 圖 5- 6 指令欄頁面輸入安裝驅動指定 ... 53 圖 5- 7COMMANDER 操作畫面... 55 圖 5- 8 移動控制操作畫面 ... 55 圖 5- 9 馬達移動速動設定 ... 55 圖 5- 10 相機連接設定 ... 56 圖 5- 11 補水、真空馬達設定 ... 56 圖 5- 12 農場模擬器運作腳本設定 ... 56 圖 6- 1 小白菜種子、花盆、培養土 ... 59 圖 6- 2 小白菜成長變化 ... 60 圖 6- 3 小白菜成長紀錄 ... 60
xi
圖 6- 4 深度學習之影像模組訓練 ... 61
圖 6- 5 小白菜成長 2 週訓練模組 ... 61
圖 6- 6 小白菜成長 2.5 週訓練模組 ... 62
xii
表目錄
表 1- 1 聯合國統計可耕地面積前十的國家 ... 4 表 1- 2 各國智慧農業發展比較 ... 9 表 2- 1 植物的不同光源的成長作用 ... 15 表 2- 2 光譜波段分析 ... 15 表 2- 3 光質與植物發育的關係 ... 16 表 2- 4 光反應與碳反應的比較 ... 16 表 3- 1 濕度感測器檢測形式分類 ... 21 表 3- 2 光感測器形式分類 ... 24 表 4- 1 機構材料表 ... 28 表 4- 2 RASPBERRYPI3 型號 B+ 規格表 ... 30 表 4- 3ARDUINOMEGA2560R3 規格表 ... 33 表 4- 4 馬達控制器接點功能表 ... 34 表 4- 5 真空範圍 ... 39 表 4- 6 DC12V365 微型抽水馬達規格表 ... 40 表 4- 7 DPC450USB 攝影鏡頭規格表 ... 41 表 4- 8 UTM 接點&功能表 ... 43 表 4- 9 濕度感測器檢測形式分類 ... 44 表 4- 10 龍門組裝材料表 ... 46 表 4- 11 XY 軸組裝材料表 ... 47 表 4- 12 Z 軸組裝材料表 ... 48 表 4- 13 機構線材材料表 ... 49 表 5- 1 驅動指令表 ... 54 表 5- 2ARDUINO 的指令參數功能表 ... 57 表 5- 3ARDUINO 指令參數的單位表 ... 58xiii
表 6- 1 小白菜種植材料表 ... 59 表 6- 2 影像辨識統計數據 ... 63
1
第一章 緒論
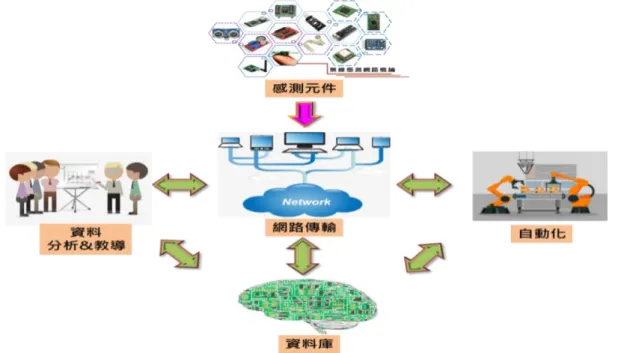
1.1 前言 近年來由於全球氣候暖化、變遷與氣候的不穩定、生活環境的破壞上、植物病害 病變與蟲害等因素的影響,造成全球農業生產困難衍生出糧食上的嚴重缺乏。科技業的 蓬勃發展,在感測元件方面,發展出外型輕薄短小、精緻化、輕量化、功能多元化;在 軟體方面,系統整合技術能力提升、網路傳輸便利快速…等。因資訊收集、分析、監控 與即時反饋處置,進而演變出智慧農業 (Smart farming,又稱為農業 4.0) 這個新穎的 名詞。智慧農業是一個除了結合以上功能外還加入了物聯網(IoT)、人工智慧(AI)和自 動化控制(Automated control)與農業種植相關資訊進行技術進行整合出的一套科技種植 生產的方法。其主要目的是將農業建立一個系統標準化管理模式、即時監控資訊傳送至 中控電腦、中控電腦依據這些數據進行分析整合,發現分析數據異常時可立即下達指示 回到現場給自動化設備進行改進及應對措施,以達到作業標準化及人工成本的精簡化。 在台灣目前有一群科學家、政府機關及一些民間農業專家密集的在進行學術合作 將農業經驗技術進行數據量化分析,並利用科技研討會方式進行討論農業種植條件、成 長環境因素、成長病變改善、成果品質優良化…等;並實地勘查驗證監控數據並訂定標 準的管控數據合理性,若遇到實際數據與理論有偏差時進而再驗證與修正到最佳化;整 合後的標準數據再進行小規模擬測試及導入自動機械化控制來實現智慧農業應用技術 進而再推廣大規模種植,研討會執行模擬開發實現如下圖示。2 圖 1- 1 智慧農業研討會模擬開發實現 [圖片出處: FBTUG FB] 1.2 研究動機與目的 因應人類生活習慣、周圍環境氣候變遷及科技業進步,演變出第四次工業革命一 個虛擬及實現互動時代,目的是為了讓農業生產率加快與精緻化,這些技術包括:感測 器應用、智慧型網路、無人載具機器人,能依照生產需求進行客制化制式化的製作應用, 例如:施肥、灌溉、農場勞務工作…等;智慧農業的目標除了上述內容還有提高整體生 產精確度,讓所有的產出作物更容易滿足消費者需求。 由於全球人口數成長、生物生活的環境惡化、可耕作的面積減少…等所衍生出糧 食生產問題;人們利用農業生技、能源生技與工業生技時來增加糧食生產產量,以及要 顧慮到能源生技與工業生技會製造出而外的環境破壞;人們該如何兼顧到環境保護、自 然資源保護、減少地球生態破壞並可改善農業品質的一致標準化、種植的自動化…等。 目前利用企業的經營生產管理模式來改善這些棘手的問題,已成為各國政府推動 智慧農業生產相關研發的重點工作,另方面也是農民在務農勞力簡單化、農業經驗延展 應用、植物的疾病可預防、生長環境優化…等,大大的減輕農民的負擔。[1]
人工智慧(Artificial Intelligence)簡稱 AI,AI 根據大量的歷史資料和即時觀察 (Real-Time observation) 資料,進行立即性的觀察並與歷史資料進行交互比對,尋找出 一 個 與 標 準 定 義 的 軌 跡 與 現 況 資 訊 不 同 的差 異 數 據 進 行 一 個 合理 的 預 測 及 頗 悉
3
(Predictive Insights) 並做適當因應處置措施;由於 AI 的比對資料不足容易產生誤解做 出不合適的決策,為了使 AI 更加聰明資料必須要持續不間斷的輸入即時收集資料到資 料庫進行更新分析,讓機器學習反覆不間斷取得資訊進行教導學習,故收集資料越多預 測的準確率也會越高。[2]
物聯網(Internet of Things) 簡稱 IoT,透過網際網路進行資料傳遞交換,並連接大 量不同功能屬性的感測元件(Sensor)進行不間斷的數據收集並將最新的數據透過網際 網路上傳至雲端的大數據資料庫,這些數據可以被人工智慧處理系統進行分析比對,並 可教導機器設備所需要的資訊並積累知識。
簡單的整理 AI 和 IoT 之間的關係,AI 是進行資料整理、分析與下決策而 IoT 是透 過網際網路串聯起所有感測元件的資訊並將資訊集結存放至大數據資料庫好讓 AI 處理 系統進行讀取分析比對並做出合適的指示;所以智慧農業的定義要有人工智慧(AI)、巨 大量的資料庫(Big Data)、物聯網(IoT,Internet of Things)及自動機械化(Automation)所 共同結合出來的農業事業。科學家們再將農民耕作時的智慧技術及經驗技術進行轉換, 成為電腦系統可懂得數位化數據與機器語言,再去和機械進行智動整合開發出一套基本 智慧辨識理論系統,最後由機器自動化系來執行應有的工作活動措施。<如圖>
4 1.3 相關發展與文獻資料之分析 地球上共有 1 億 4800 萬平方公里的陸地,但是大部分是無法耕種的山地、冰川或 荒漠,耕地面積大約有 3100 萬平方公里;依據聯合國糧農組織的統計數據,下圖為可 耕地面積前十的國家排名: 表 1- 1 聯合國統計可耕地面積前十的國家 從地圖可看出,美國可耕作面積幅員廣闊躍居第一、印度排位第二、第三為中國, 以面積來看中國面積大於印度但中國平原面積少且有浩瀚的沙漠地區;在印度、歐盟 25 國與奈及利亞的種植有效面積占國家土地面積有 30%以上。 圖 1- 3 聯合國統計世界各國耕地面積占國土總面積比例示意圖 (數字單位為百分比)
5
智慧農業(Smart Agriculture,又稱農業 4.0) 這個名詞在網路搜尋關鍵字有兩個英 文名詞〝Intelligent Agriculture〞或是〝Smart Agriculture〞。智慧農業一名詞在台灣的出 現時間並不久而在美洲以美國發展最久、歐洲歐盟 25 國中以德國較早運行,在我們生 活的亞洲地區的國家就屬日本和中國在智慧農業的開發較早;這幾個國家所發展的智慧 農業各有千秋。 美國: 位於北美洲中部,北鄰加拿大、南接墨西哥、東瀕大西洋、西臨太平洋。 可耕作土地面積 28 億多畝是國土總面積的 20%以上,占世界耕地總面積的 13%,土壤多 以草原黑土(包括黑鈣土)、栗鈣土和暗棕鈣土為主,有機質含量高。氣候為北溫帶和亞 熱帶氣候、佛羅里達南端屬熱帶氣候、阿拉斯加為亞寒帶大陸性氣候、夏威夷則是熱帶 海洋性氣候;全國雨量充沛且分佈均勻,年平均降雨量為 760 毫米;因為耕作面積廣大, 農民大量使用自動化器具輔助進行種植,利用航空器具解決噴灑農藥的問題,政府也補 助農民購買自動化設備進行耕作,幾乎是所有的農家皆有自動化耕作設備。美國在 1975 年建置農業電腦網路利用衛星科技 GPS、農田遠端感測 RS、農田地理資訊 GIS、農業 專家、智慧農機具、環境監控、網路管理及培訓等系統整合大數據料來實現農業科技。 圖 1- 4 美國農業作業情形 [圖片出處:網路] 德國:位於歐洲西部之北緯 55.2 度至 47.5 度間,土地面積 24 萬 8 千餘平方公里, 年均溫為攝氏 9 度,年平均雨量 650 公釐。農業是一個國家的基礎產業,德國政府很重 視農業的發展,在學校課程內編列相關農業課程培養農業人才,為學生們提供一個良好 的農業鍛鍊機會;德國的農業教育除了書籍上的理論知識,也成立德國農業委員會;有 專門農業專家協助輔導解決農民農作上問題,並制定出科學的農業教育政策。德國政府
6 為了提高農業生產力,推動 iGreen 計畫,結合產、官、學界三方面資訊整合來訂出標 準作業流程 SOP,加速其智慧農業的發展。 圖 1- 5 德國農業作業情形 [圖片出處:網路] 日本: 日本是一個島嶼國家,位於太平洋的西北部。東鄰太平洋,西面的日本海 對岸是俄羅斯、北韓及南韓,南以菲律賓海與臺灣、馬里亞納群島鄰接,北以宗谷海峽、 鄂霍次克海與庫頁島、千島群島鄰接;北海道、東北地方屬溫帶大陸性濕潤氣候,本州、 四國、九州、琉球群島屬副熱帶濕潤氣候,年平均雨量 1700 公釐。1991 年聯合國糧食 及農業組織 ( Food and Agriculture Organization of the United Nations,FAO ) 提出「農 業可以永續發展」的概念後,日本政府在 1992 年提出「積極推展環境保護型農業的新 政策」,並在 1999 年訂定及開始實施新農業基本法的「食料農業農村基本法」時,推 動農業永久性性發展與農業自然環境機能,成為日本農業的長期性施政方針。日本農業 政策的主要目的有二: 1.日本農業持續發展性:確保農地、農業用水、其他農業資源以及農民,建構一個合適 的土地和作物並有效率的種植方法來施行自然循環機能環境耕作;即為發展循環型的環 境保護農業政策,是日本農業可以適存於世的充要條件。 2.日本農業推展環保性:人類從事農業生產是維持人類生存的方法之一;為確保農業有 合適的生產環境,是農民在生產過程中必須注意到的自然法則,農民在種植所使用的肥 料,是利用家畜所排泄的廢棄物做為肥料的基礎在適時的添加其他有機肥料進行讓農作 物生長,利用廢物回收再利用的概念做一個自然循環的理念方針。 日本為了確保作物生長穩定快速及環境資源沒有遭受破壞,利用資訊科技 (IT) 的高速資訊通訊網路為重點發展,開發出人工智慧 (AI) 的生產技術(農業知識和農業
7 經驗準則)及監測資訊數據進行深入調查找出一個顯著的法則進而將此技術推廣到海外 並帶動利用 AI 技術生產的農作物。 圖 1- 6 日本的環保農業 [圖片出處:網路] 中國: 位於亞洲東部、太平洋西岸,土地面積約 960 萬平方公里,中國土地面積 廣大各地區的降雨差別很大,降雨趨勢從東南沿海一路向西北內陸遞減,東南沿海的年 降水量在 1600 毫米以上,西北內陸年降雨量在 50 毫米以下。沿秦嶺為降雨量分界線年 降雨量在 800 毫米,可以劃分為濕潤地區、半濕潤地區、半乾旱地區和乾旱地區四區。 圖 1- 7 中國雨量分佈圖 [圖片出處:網路_www.tlsh.tp.edu.tw] 農民從以前依靠雙手勞力型的傳統現象已被拋棄了,農民利用農業大數據平台隨 時隨地的監測到土壤、天氣、農作物成長情況…等數據進行分析及發現異常立即處理減 少了不必要損失,衍然科技的力量讓農村的農民成為新世紀的「網路新農民」;政府設 立農業示範區,廣納收集地方農民意見並向外引進感測技術與裝備進行,並開發農業物
8 聯網 (IoT) 使用、建立標準作業流程及發展農業應用於病害、農產品安全、種植管理 系統,讓農民可以即時確認作物狀態、掌控成長速率及病害監控處置措施。國家大數據 戰略,讓傳統農村社會變成數位化農村是推動農業大數據發展應用是一個重要方向。 大數據主要是避免種植過程中的缺失出現,而優點是能有效率快速讓作物成長, 減輕傳統人工經驗法則並可從中挑選出優良品種。但進行商業農業化的生產過程還有其 他複雜問題要解決,例如:有植物生物學、環境氣候和生產作業…等問題。農民為了能 精準的掌控農業資訊,利用 GPS 精準定位田地座標且,收集到不同田地間的成長情況 紀錄於大數據當中,再透過軟體進行大數據分析並咨詢專家確認來協助農民解決問題, 再以機器學習方式將這些軟體分析的數據,透過自動化設備進行處置,而分析數據越多 其軟體會變得越聰明越有智能,讓設備系統透過不斷的學習可以幫做出更明智的決策。 圖 1- 8 中國的 IoT 農業 [圖片出處:網路] 台灣: 位於亞洲東部,面積 3 萬 6 千餘平方公里,居於東北亞和東南亞交會,東 接太平洋(菲律賓海)、西隔台灣海峽與歐亞大陸(中國大陸)相望、南濱巴士海峽與 菲律賓相望、北接東海、東北方與琉球群島相接;臺灣中南部的嘉義和花蓮是北回歸線 界,將臺灣氣候劃分為南北兩個氣候區,北為副熱帶季風氣候,南為熱帶季風氣候在夏 天吹西南風而冬天吹東北風,五、六月為梅雨季,六至九月為颱風季,於冬天時偶有寒 流,年平均降雨量高達 2500 公釐以上。 台灣農業以組織合作方式讓農民有小規模生產集結成大產出模式,來抗衡大農的 價格上的競爭,小農藉由產銷班、農會策略聯盟的組織力量參與來相互提升農業生產的 技術問題,再透過政府農業單位的專家輔導大大提升產量上及減少農業危害上問題。 由於國際市場貿易自由化,小農有策略聯盟的組織和政府專家在背後支持,讓農 民的農業技術蒸蒸日上,相對的在產量上可以自足外還可以外銷到世界各地替農民的收
9 益增加不少。近期農民為了讓農業精緻化利用科技技術,來輔助偵測農業生產過程試著 找出盲點來改進提升品質與產量;台灣的智慧農業雖然發展時程較晚,且著重於農業轉 型為科技農業、精緻農業作為導向方針,並整合農業種植技術經驗、再進行分析訂定一 標準法則並推廣到各基層來套用[3] 圖 1- 9 台灣的農會策略聯盟 [圖片出處:網路] 整合比較各國的智慧農業的構想與比較,如下表: 表 1- 2 各國智慧農業發展比較 1.4 市場概況
關於智慧農業這個議題,市場調查公司 Frost & Sullivan 的市場調查分析中提出智 慧農業領域有幾項的應用,包括:農業機器人、農場管理資訊系統、精準農業、數位市 集、智慧物流與倉儲、監測與預測氣候、智慧溫室。[4]
10 一、農業機器人 農業機器人在現代農業發展中扮演著重要的角色,大多數的農民皆想用最少的時 間與資源來生產出大量與品質一般的作物;但透過農業機器人的結合進行數據收集及分 析,能替農民在生產過程中更精準判定成長情況與農場及作物發生了問題時可立即處置, 來達成減輕人工巡視的時間與異常的判定處置,因此可以提升生產率;此外,農業機器 人協助於勞務方面的工作,有助於降低勞動力成本。 二、農場管理資訊系統 大部分的農業仍以人員管理為主;在智慧農業領域上因農場的異常解決方案投入 開發人員較少,且專業農業管理人員對企業管理的知識認知不足下,所以沒有一個有效 的系統制度來進行數位農場管理;目前各研究機構的學者、政府機關與現場農業管理人 正積極開發一套農場管理資料庫並結合人工智慧技術,來產出一套管理農場的標準 SOP 使得在農場生產作業有所依據且有一致的標準。 三、精準農業 精準農業能準確控管農場內的所有變化,利用較少的資源來生產較多的作物而達 到降低生產中成本耗費。精準農業並非用假設性的條件和人工過往作業經驗來判定整個 農場問題所在,而是利用大數據統計資料來辨識農場內所觀測到的成長差異變化,並提 出有效的調整管理行為,來應相對問題達成準確控管。 四、數位市集 數位市集已經結合成為農作企業(Agribusiness)生態系統中的一環。連接產者與終 端消費者的途徑管道之一;新的商業模式除了銷售以外還需提供給終端消費者作物成長 的相關履歷資訊,讓消費者在使用上能夠安心,這也能夠讓生產者能夠直接將產品推銷 給顧客,讓顧客可以採用預約的方式提前下單預購,使得沒有庫存上的壓力。 五、智慧物流與倉儲 儲藏作物也是糧食管理中重要的一環,品質新鮮、客戶信賴。從生產農民手中採 收、整理、包裝到出貨,作物的新鮮度一直在下降,如何保鮮是很重要的;智慧倉儲就 含蓋了,有存儲設備的溫度、濕度、空氣控制與壓力等基本條件外;還需讓倉儲管理者
11 可即時的知道食物品質狀況,並可提醒食物損壞的預防措施;並透過最合適的物流與配 送條件,將食物運補到市場或消費者手上,降低生產損失與管理損失。 六、監測與預測氣候 在現今氣候變遷與全球暖化下,天氣更為複雜且難以預測,使得天氣預報資訊成 為決策的關鍵因素;目前在農業氣象都依賴官方的整體環境氣氣候預報資訊及區域性氣 候環境再由當地的農民依照氣候預報、過去經驗與傳統推測方法進行判定天氣變化,若 一旦發生錯估往往會造成無法彌補的損失。 七、智慧溫室 智慧溫室能從農業環境控制至作物生長過程中都能準確地監測資訊,以讓作物能 在最佳的環境下快速成長。近年來隨著物聯網技術成熟發展、資通訊技術與自動化技術 引入農場管理已成為一種趨勢,結合了這些相關技術已經可以打造出一套理想化的農場 讓作物生長,但若要達到量產規模可能造價費用相當可觀,目前只能小量生產。
12
第二章 農業技術探討與研究
台灣位處於四周圍海洋的島嶼,因農耕環境受限及天氣劇變的情況下,台灣的農 業生產需要一個與過去傳統農業做出差異化;台灣科技、農業在全球是數一數二的國家, 卻無一套先進科技的整合系統來整合分析農業生產流程。在全球科技爆炸的當下引發了 第四次工業革命,我們利用物聯網 (IoT) [5]的大數據的資訊、人工智慧(AI)的辨識能 力及自動化設備的操作來進行一項無人化的農業耕種,即為時下所稱的”智慧農業”。 圖 2- 1 農業中的物聯網 2.1 台灣農業的發展 台灣農業發展歷程,在 1950 年代,台灣的糧食嚴重不足百姓無法豐衣食足,政府 在農業方面以改善生產作業並引進新的生產技術來提高生產力;1960 年代,台灣糧食 生產已經可以自給自足而有餘,政府鼓勵農民種植經濟作物,並積極推廣海外農業市場, 但為了方便長途運輸,開創了食品加工業,將鳳梨、洋菇、蘆筍等農產品製作成罐頭方 式外銷至歐美各地。1963 年,世界糖價高漲且台灣已經有能力發展輕工業,促使台灣 工業起飛,經濟重心由農業移轉到工商業。1968 年以後,農業勞力出現缺乏影響了農 業發展,政府推動農業機械化,先後從先進國家美國及日本引進曳引機及耕耘機,並改 良合適台灣耕作的農業機具來解決農村勞力不足的問題。1970 年代中期,台灣經濟成 長、國民所得提高,開始重視產品品質及選擇的多樣化,因此農產品開始重視以市場為 導向的產業發展。1980 年代以後,在經貿自由化,國際市場的動態變化農業面臨的不 再是技術面的問題,而是經濟面的問題;台灣農業必須同時考量國內外相關因素、產業 發展、農民福祉與生態環境保育。13 由於,經濟貿易自由化下農產品的生產成本逐漸提高,台灣農業面臨另一項挑戰; 小農開始組織合作以產銷班、農會策略聯盟的組織力量來相互提升農業技術並不在以產 量維優先考量而是走向精緻農業導向。 2.2 台灣的智慧農業 智慧農業的發展,因傳統農業耗時耗力並需要有專門技術人員依照經驗法則並搭 配勞力來管控植物的成長過程;作物成長因子(例如:溫溼度、土壤養分、植物病害隔離、 氣候辨識…等),這些因子除了需要靠專家來辨識外也需有勞作人力來執行工作(例如: 撥種、澆水、除草、施肥、收成、分級、包裝、出貨…等);而這些工作的共通性皆需 靠有經驗人員辨識與勞作的來執行施作,但因人口老化、專家人數銳減造就後繼無人的 窘境;這些問題立即影響到糧食上的短缺問題之一,所以我們必須要建立一套標準作業 程序(SOP)與自動控制操作系統,來發展出一套無人農業耕種的模式;有了一套標準作 業程序(SOP)也可以再探討出農業耕作程序中的重複性與非重複性,重複性可利用自動 化機械做出制式的作業流程,非重複性可再進階討論其必要性進而增加刪減作業程序。 2.3 農業機器人分類 農業機器人的建置是不可或缺的,機器人可以搭載所有感測元件、動作制動元件 及視覺辨識系統[ 6~8];目前開發於農業產業上的機器人依照底盤分類有:蜘蛛式→農 作物成長區域不規則時使用;輪式→作物成長區域固定且地面環境較平整乾燥;履帶式 →作物成長區域固定但地面環境較差高低起伏且鬆軟;滾球式→作物成長區域固定且地 面較平坦。 圖 2- 2 農業產業上機器人 - 底盤分類 [圖片出處:網路]
14 依照工作單元分類有:吸附式→作物表面光滑或球體之不易固定形狀使用;夾抓式 →可分雙爪或多爪型式,功能性較為廣泛類似於人類的雙手拿取動作;撥整式→工作物 件為圓鍬以等距方式排列,一次可同時挖掘多個坑洞進行整地撥種;鋤草式→工作物件 可分為兩類(刀片和牛筋繩),兩種差異在於環境及被鋤草的特性差別進行修正調整;空 飛式→主要在作視覺影像辨別確認農作物生產情況、作物面積範圍……另外較大台的空 飛式機器人也用於大面積的藥物灑作業。 圖 2- 3 農業產業上機器人 - 工作單元分類 [圖片出處:網路] 2.4 農作物成長條件 農作物從育種苗至成品過程中,皆經由農業專家依照專業技術進行控管其成長條 件,使農作物可有效的成長;而這些成長條件因子必須探討其中的特性與科技技術間如 何進行整合。 首先,探討農作物的生長環境條件;植物生長五大要素:1.光線、2.溫度、3.濕度、 4.空氣、5.土壤。[9~14] a. 光線: 光線也就是日照,綠色植物中的葉綠素與光線結合進行光合作用產生;葉綠體在 陽光的作用下,把經由氣孔進入葉子內部的二氧化碳和由根部吸收的水轉變成爲葡萄醣, 同時釋放出氧氣。 植物的光合作用可分為光反應和碳反應兩個步驟如下: 12H2O +陽光→ 12H2 + 6O2 [光反應] 12H2 (來自光反應) + 6CO2 → C6H12O6 (葡萄糖) + 6H2O [碳反應]
15 圖 2- 4 植物的光合作用 [圖片出處:教育部中學資源網] 光線可以提供植物產生養分外,其受到光的強度所限制住即不同波長及比例所影 響;藍光:植物的莖中含有藍光受器(向光素),當接收藍光後會使生長激素分布不均, 使植物朝向光源生長,但若植物受到過多的滿藍光,向光素讓生長激素分泌減少,使其 生長受到抑制。紅光與遠紅光,葉綠素吸收紅光的波段能力佳讓植物進行光合作用時效 率變高,但如果吸收過多紅光照射時,其葉綠素含量將會減少,使得植物的莖、幹等生 長指標降低及影響植物的開花時程,如:植物體內的紅光敏素轉換變化促進長日照植物 開花,反之抑制植物開花或種子發芽。紫外光:紫外光具有抑制莖延長、促使花青素合 成等作用;紫外線主要會造成細胞核內核酸鹼基的異常,導致植物的細胞死亡。 表 2- 1 植物的不同光源的成長作用 光譜略可以分為紫外輻射(Ultraviolet)、光合有效輻射(Photosynthetically active radiation,PAR)通常稱為可見光區和紅外輻射(IR)三大部分。(如圖示) 圖 2- 5 光譜圖 [圖片出處:勢動科技] 表 2- 2 光譜波段分析
16 光質與植物發育的關係: (如下表) [9,10] 表 2- 3 光質與植物發育的關係 b. 溫度: 每一種植物都有它生存合適的溫度,若給它不合適的溫度會影響它的成長;所以 溫度高或低對於植物的成長影響很大;原生於溫帶的植物,可以忍受低溫但不耐高溫, 反之,熱帶的植物,可以抗熱抗高溫但不耐低溫。在光合作用系統中,溫度主要是影響 酵素的活性,溫度越高其酵素活性越高而碳反應的效率也相對提升,故溫度會影響到碳 反應。 表 2- 4 光反應與碳反應的比較 c. 濕度: 水分是生物細胞組成的主要物質,綠色植物的含水量達 80%以上。植物所需的水 分,來自於土壤中的水分還有空氣中的水分,這就是我們所稱的濕度。植物從根部進行 吸收水分輸送供給到莖、葉各部位吸收蒸散;如果植物所吸收量少於蒸散量,植物就會 缺水導致莖葉枯萎死亡,因此在乾旱或炎熱的季節裡必須注意植物的水分供給;而在水
17
量過盛或雨季時,土壤的含水量過高、空氣的含量變少,阻礙了根部的吸收發育成長嚴 重中也會影響植物的生存。
水是帶動整個植物體內的各種生理代謝(Physiological & Metabolism)反應;光合作 用、呼吸作用、有機物質合成和分解的過程中均有水的參與。植物體內的代謝過程都是 以液體進行也就是水,當介質來運行溶劑養分的傳遞。水也能調節植物的本體溫度控制 溫度在一個區間內,避免溫度有大幅度上升,例如: 在炎夏強烈的光照下,植物也不致 被陽光灼傷受損。故水可以調節植物的生存環境、增加大氣濕度、改善土壤內及土壤表 面大氣的溫度等。[14] 圖 2- 6 植物水分吸收與輸送
[圖片來源:(2)Transpiration, The McGraw-Hill Companies, Inc.] d. 空氣: 空氣是任何生物的生存要件因素,植物的葉片在白天進行吸收空氣中的二氧化碳 再經由光合作用轉變為碳水化合物後釋出氧氣;而植物的根、莖、葉在呼吸作用下也將 碳水化合物分解成二氧化碳和水;植物隨時隨地不斷進行光合作用與呼吸作用來維持空 氣的潔淨度與根部的通氣使植物可以正常的成長。 e. 土壤: 土壤中含有水分、空氣、營養元素和微生物。土壤要能夠提供植物成長所需的養 分及讓植物可直立的支撐力量以維持其生命力。植物大多從根吸收土壤中的養分,不足 的部分由外加施肥獲得補充或由液態肥料經由葉面進入植物體內,但大部分的養分仍以
18 土壤中經由根的吸收而成為養分居多。因此要提高農作物的質和量維持土壤的健康和合 理土壤的密度以保持土壤中的通風良好是必要的。 圖 2- 7 農作物生長的重要因子 2.5 論文架構 本論文之研究範圍,依照作物成長過程中所控管的條件因子,應用感測元件來收 集相關資訊並探討知悉其感測元件的動作原理;自動化機構骨架進行建置、設計、操作 及其機構骨架控制的軟、硬體進行編輯與安裝;最後再總結系統整合智慧與科技化來達 成科技農業所需要的相關資訊應用與實現;本論文利用多軸機器手臂系統,搭配種苗撥 種與培育及成長過程中即時監控、分析與辨識系統,其中視覺辨識還可進行作物外在環 境與成長狀態辨識。 圖 2- 8 論文探討架構
19 模擬實驗自動種苗撥種與成長辨識系統流程如下圖 圖 2- 9 自動種苗撥種與成長辨識系統 架構圖 整合後的模擬系統的感測器架構如下圖 代替人員收集農作物成長過程中的外在環境變化量或本身的成長變化量,這些變 化量都足以影響到整體農作物的成長品質故須由感測元件偵測得到一個量化統一標準 值再由系統分析下達合宜的指示修正成長條件。(如下圖) 圖 2- 10 農作物成長感測器架構
20
第三章 感測元件運用
3.1 感測元件概論 科技領域中的感測元件相當於人體的感測器官(視覺、聽覺、嗅覺、觸覺) 能夠偵 測、感受外界的訊號、物理或化學變化後傳遞到中控元件,它該如何整合發揮其所本能 進行數據接收及建立大數據分析,在農作物成長過程的有效的收集資訊並傳遞回控制系 統當中。生產者在生產過程中常必須觀察、追蹤來進行改善執行措施;其中不外乎有會 影響農作物生長的條件因子。而這些成長條件在傳統的農業種植過程中都是依靠人員的 辨識後,進行調整成長條件使農作物可以順利成長;在自動化生產模式下該如何運用相 關的感測元件來替代人員的辨識判斷。 感測元件是用來測量一物理量(力、位移、角度、振動、音波、流量、溫度)或化 學量(化學成份、pH 值、濃度、鹽度、黏度、密度、比重)並且將其變化轉換成量化數 據供觀察者讀取其電性(信號)輸出裝置。[15,16] 3.2 溫度感測器元件 溫度感測器它是利用材料的物理特性;隨溫度的改變而量測其特性的變化量來標 示其溫度值。例如:熱敏電阻( Thermistor,Th ),熱敏電阻是由 Thermal(熱)及 Resistor (電阻)兩詞組成的混成詞。熱敏電阻最常見也較便宜的且對溫度極為敏感的半導體元 件;熱敏電阻可分為兩種,正溫度係數及負溫度係數,而正溫度係數熱敏電阻(Positive Temperature Coefficient Thermistors,PTC)為溫度向上升高時期電阻值也隨著增加(溫度 與電阻值成反正比),負溫度係數熱敏電阻(Negative Temperature Coefficient Thermistors, NTC )為溫度向上升高時,其電阻值反而減少(溫度與電阻值成反比)。[17,18]21 圖 3- 2 熱敏電阻外型 [圖片出處: 高立_電子材料導論] 圖 3- 3 熱敏電阻曲線 [圖片出處:網路维庫电子市場網] 3.3 濕度感測器元件 為控管土壤中的水分比例,透過感測器量測資訊來做土壤份的灌溉補充,防止農 作物因水分太少造成農作物乾枯而死亡,所以濕度監控是不可或缺的。濕度感測 (Humidity transducer),是一種能感受氣體中水蒸氣含量,並轉換成可用輸出信號的傳 感器,屬於化學性的感測。感測器因操作環境的不同而有所不同的檢測方式:阻抗或電 容值的變化、氣體熱傳導率、晶體震動的共振頻率、α射線的變化衰減與光吸收反射等 四種方法形式。[18-20] 表 3- 1 濕度感測器檢測形式分類
22 此論文採用電容式濕度感測器,當環境中濕度發生變化時,電容式濕度感測器的 介電常數產生變化,使其電容量也隨著發生改變,其電容變化量與相對濕度成正比。電 容式濕度感測器的主要優點是靈敏度高、產品互換性好、響應速度快、濕度的滯後量小、 製造便利、體積小,其精度一般比電阻式要低一些,電容器濕度感測器由兩個電極所組 成其功能好比一個電容器。 圖 3- 4 電容聚合物濕度感測器結構圖 [圖片出處:國立臺科大自動化及控制研究所] 測量時將感測器插入土壤中,土壤周圍形同是一電介質,利用振盪器驅動電容器而產生 一個正比於土壤介電常數的訊號。因水的介電常數大於土壤礦物質及有機質,所以被測 物 的 含 水 量 之 變 化 可 由 感 測 電 路 進 行 立 即性 的 偵 測 。 量 測 之 單位 為 體 積 含 水 量 VWC(%)(Volumetric Water Content),VWC 為一定單位體積的土壤中水與土壤的比(%), 在飽和狀態下相當於土壤孔隙所佔的百分率。
圖 3- 5 電容聚合物濕度感測器相對濕度響應曲線 [圖片出處:國立臺科大自動化及控制研究所]
23 3.4 光感測器元件 光感測器(Photoelectric sensor)是將接收到的光訊號(紅外、可見及紫外鐳射光) 轉 換成電訊號;主要元件組成由光源、光學通路和光電元件三部分而成。用於檢測直接引 起光變化量的量測,如光的強度、光的照度分析等;也人可利用光的折射來檢測偵測其 能量轉換成光的變化量,例如:零件尺寸、表面粗糙度、物品的位移、振動、速度、以 及物體的外觀形貌、工作狀態的識別等。光電式感測器具有非接觸、反射響應迅速、性 能可靠等特點,因此在工業自動化裝置和機器人中獲得廣泛被使用。 光感測器的原理,當無光照時,它與普通二極體一樣,輸出反向電流很小關閉無作用, 稱為光敏二極體的暗電流;當有光照時,載子被激發,產生電子與空洞,稱為光電載子 電流。在外電場的作用下(光照射),光電載子電流參與導電,形成比暗電流大的反向電 流,該反向電流稱為光電流;光電流的大小與光照強度成正比,在負載電阻上就能得到 隨著光照強度變化而變化的電信號。 依照光學輸出測量控制性質可分二類, a. 持續式光感測器,量到的光轉換成連續變化的光電流,光電流與被測量物間是一個 相互對應關系,依照光的強弱變化對應到輸出的電流變化。 b. 脈沖(開關)式光感測器,有如開關依樣,當光線照達到可激發到光電材料裡的電子 與電洞產生劇烈變動而導通。 常見的光感測元件是光敏電阻,光敏電阻(Photo-sensitive resistor)的電阻值與光 線有關,照射於感光面的光線亮度增加時,電阻值會變小,亮度減少時電阻值會加大, 其原理是光線照射於半導體,將本穩定的電子受到激發而成為自由電子,常見的材料為 硫化鎘(Cds)或硒化鎘(CdSe),因而常用 Cds 代表光敏電阻。 圖 3- 6 光敏電阻的外型與電路符號 [圖片出處:網路老馬識途單片機]
24 圖 3- 7 光敏電阻的光電特性曲線 [圖片出處:網路老馬識途單片機] 光感測器將收到光的訊號轉變成電的訊號,電的訊號再進一步做動各種不同 的開關及控制;換而言之,一組光發射器和光接受器之間的光線投射將光能轉換 到電能所獲得的訊號變化量大小來控制各種自動化控制元件。光感測器可分為下 列形式: 表 3- 2 光感測器形式分類 3.5 機器視覺影像處理基礎 數位影像是由像素(Pixel)組成的它是影像中的最小單位,pixel 的 pix 是「相片」 英語單詞 picture 的常用簡寫,「元素」element,就得到 pixel;一般畫素數值越高表示 像素越多其影像越清晰越真實,每一個像素在一個影像當中都有其對應的座標和顏色的 編碼資訊,而視覺影像就是利用這些像素的固定座標與顏色編碼進行演算法的計算以達 到機器可辨識的方式,進而可透過電腦來替代人的視覺影像加以進行辨識判斷動作。 機器視覺主要是由光學、電子電機及電腦資訊整合下的一項集合產物(如圖 3-8); 物體材料利用光學原理進行投射與折射方式,將圖像縮小印製到視覺系統內的電子感測
25 元件的相對應位置中,電子感測元件再將座標上的資訊傳輸到視覺系統的運算電腦當中 進行一連串的分析比對後,再由電子、電機、機械執行工作其中的主動元件(馬達…等)、 機械骨幹(支架)和整合的自動化控制機械形成的機器人來執行工作;而視覺系統透由感 測元件(鏡頭…)進行資訊的收集和統計再回饋到視覺系統進行整理分析。 圖 3- 8 機器視覺系統組織圖
26
第四章 主機架構設計與應用
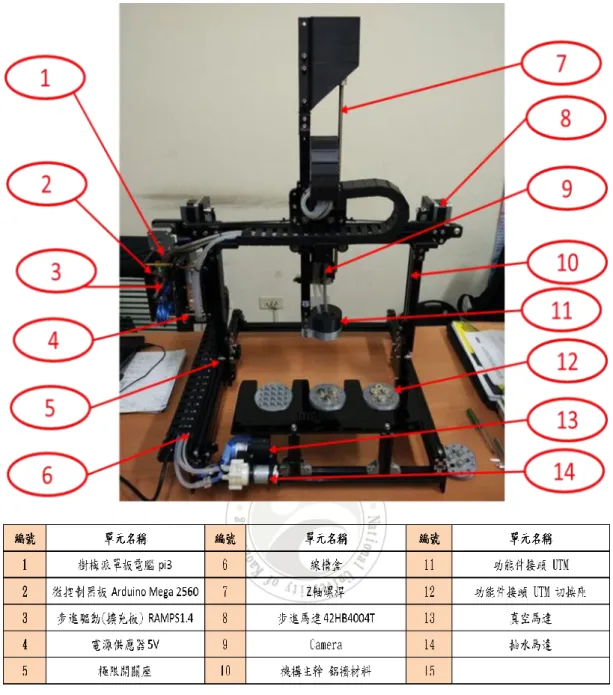
機構動作無法和人體活動一樣來的靈活,但機構結構是用來表達人體肢體的活動, 透過硬體結構設計來擬人化,模擬人員在現場作業模式再透過一個溝通語言當作媒介來 下達正確的指令。 4.1 硬體架構 為了進行多軸機器手臂種苗培育及成長辨識系統之研究,我們採用縮小版的實驗 模擬機進行實驗測試之研究;多軸機器手臂種苗培育及成長辨識系統外型如下: 圖 4- 1 多軸機器手臂種苗培育及成長辨識系統外型 設備主架構採用龍門式ㄇ形架構進行,X、Ý 軸面方向的移動再搭配一支 Z 軸的 垂直手臂進行點位置的工作執行;整體架構材質採用鋁擠型鋼材強化主結構強度。 實驗模擬機外型與部件名稱27
28
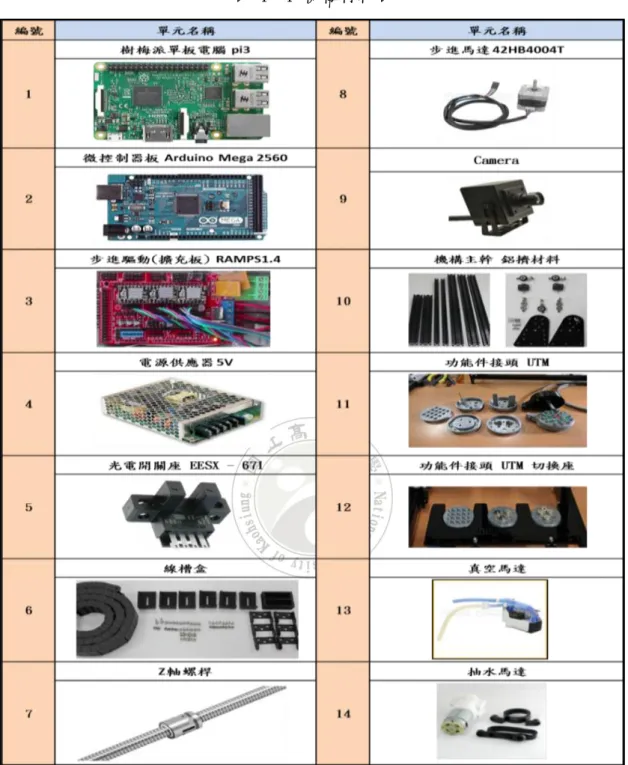
表 4- 1 機構材料表
4.2 單板電腦
「單板機」或稱「單板電腦」(SBC, Single Board Computer),是將計算機的各部總 成集中組裝在一塊印刷電路板上,裡面包含有微處理器、暫存器、輸入輸出連接點、簡 單的發光二極體顯示器、小鍵盤、插座等其他外部設備。
29 圖 4- 3 Top 10 單板電腦排行榜 (主流單板電腦) 本論文研究選用排名第一的樹莓派單板電腦,它比較可讓大家接受且其周邊系統 能力較為廣泛;樹梅派的演變從第一代的樹莓派(Raspberry Pi)發表於 2012 年,第二 代在 2015 年,第三代 2016 年,2018 年 3 月推出第三代的升級版 3B+版(如下圖)。 圖 4- 4 Raspberry Pi 3 Model B+ 排名 1 2 3 4 5
品牌 / 型號 Raspberry Pi 3 Model B+ UDOO Bolt TinkerForge Red Brick Versalogic Zebra Wandboard WandPi 8M 圖片 排名 6 7 8 9 10 品牌 / 型號 Boundary Devices Nitrogen8M Libre Computer Renegade iWave Systems iW-RainboW-G23S 源創通訊 Banana Pi BPI-W2 Marcel Thurmer’s Blueberry Pi 圖片
30
樹莓派 Raspberry Pi 3 型號 B+ 規格,如下表
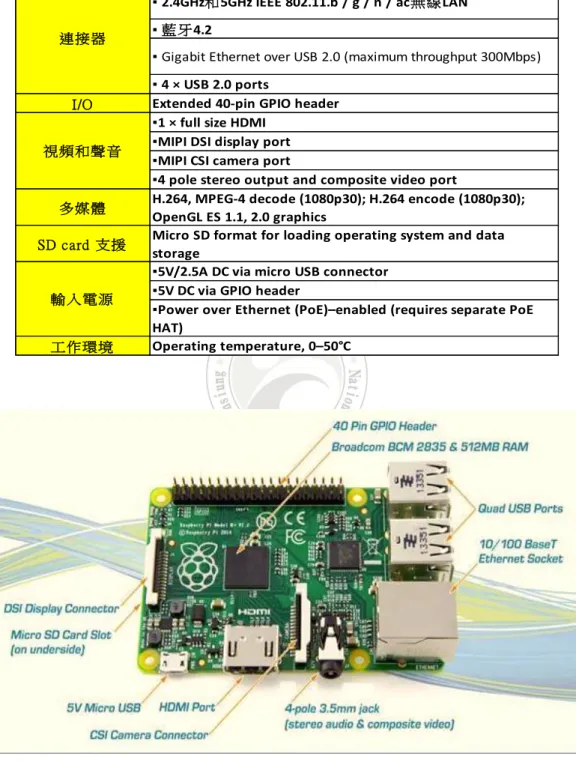
表 4- 2 Raspberry Pi 3 型號 B+ 規格表
圖 4- 5 Raspberry Pi 3 的外觀 [圖片來源:樹莓派官網]
處理器 Broadcom BCM2837B0, Cortex-A53 64-bit SoC @ 1.4GHz
記憶體 1GB LPDDR2 SDRAM
▪ 2.4GHz和5GHz IEEE 802.11.b / g / n / ac無線LAN ▪ 藍牙4.2
▪ Gigabit Ethernet over USB 2.0 (maximum throughput 300Mbps)
▪ 4 × USB 2.0 ports
I/O Extended 40-pin GPIO header ▪1 × full size HDMI
▪MIPI DSI display port ▪MIPI CSI camera port
▪4 pole stereo output and composite video port
多媒體 H.264, MPEG-4 decode (1080p30); H.264 encode (1080p30);
OpenGL ES 1.1, 2.0 graphics
SD card 支援 Micro SD format for loading operating system and data
storage
▪5V/2.5A DC via micro USB connector ▪5V DC via GPIO header
▪Power over Ethernet (PoE)–enabled (requires separate PoE HAT)
工作環境 Operating temperature, 0–50°C
連接器
視頻和聲音
31
圖 4- 6 Raspberry Pi 3 Model B 外型尺寸圖 [圖片來源:樹莓派官網]
32
4.3 ARDUINO 單晶片微控制器 (馬達控制器)
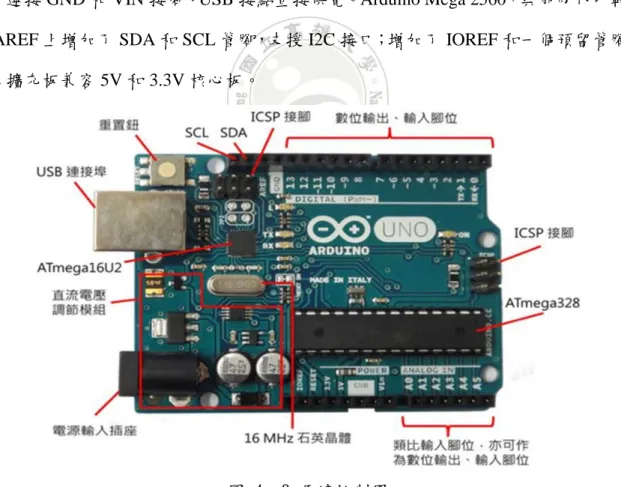
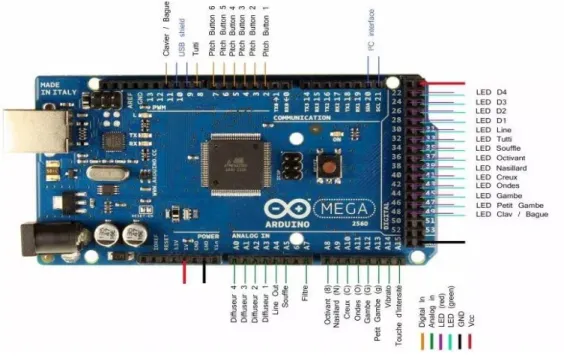
Arduino 是一個開放原始碼的單晶片微控制器;使用開放原始碼的軟硬體平台, 建構於簡單 I/O Port 的介面板,並且具有使用類似 Java、C 語言的 Processing/Wiring 開 發環境;Arduino 可簡單地與感測器及各式各樣的電子元件相互連結搭配使用,例如紅 外線、超音波、熱敏電阻、光敏電阻、伺服馬達…等。Arduino 是本系統硬體部分的主 要控制核心,負責接收感知器訊號與控制馬達作動方式,將所需求的控制程式寫入後即 可依照需求的作動進行執行工作。Arduino Mega 2560 R3 是由意大利 Arduino 設計的旗 艦式微型電路板,由 ATmega16U2 芯片作為核心,擁有 54 點的數位輸入/輸出,16 點 的模擬輸入,4 點 UART 接點,16MHz 晶體振盪器,USB Type B 界面,一個電源插座, ICSP header 和重設按鈕;Arduino Mega 2560 有 3 種供電方式:外部直流電源插座供電、 電池連接 GND 和 VIN 接腳、USB 接點直接供電。Arduino Mega 2560,與前兩代比較。 在 AREF 上增加了 SDA 和 SCL 管腳,支援 I2C 接口;增加了 IOREF 和一個預留管腳, 能為擴充板兼容 5V 和 3.3V 核心板。
33 圖 4- 9 馬達控制器尺寸圖 [圖片出處: FBTUG FB] 表 4- 3 Arduino Mega 2560 R3 規格表 數位輸出/輸入腳位:腳位可輸出高電位 5V 與低電位 0V 的數位訊號,也可接受數 位訊號,數位腳位編號為 D0 到 D13(D 代表 Digital);接腳 D3、D5、D6、D9、D10、 D11 的數字編號旁有個波浪符號(~),這表示這些腳位可以用數位訊號來模擬出類比訊 號;接腳 D0 與 D1 這兩個數位腳位,分別被標示了 RX(Receiver)、TX(Transmitter),
34 這兩個腳位用於序列埠傳送,且與 USB 序列埠連接,因此電腦若使用 USB 與控制板互 傳資料時(可見到控制板上標示為 RX、TX 的 LED 閃爍),應避免使用 D0、D1 兩個 腳位;D13 腳位連接著控制板上標示為 L 的 LED,若是原廠控制板,預設會燒錄一個 令 D13 定時切換高低電位的 Blink 程式;因此,首次接上電源時,會看到標示為 L 的 LED 不斷閃爍,這是初步檢視控制板是否功能正常的方式。類比輸入腳位:類比腳位編 號為 A0 至 A5 六個腳位,可用來接受類比電壓輸入,但不能輸出類比電壓,如前所述, 類比電壓必須透過數位腳位 D3、D5、D6、D9、D10、D11。控制板上 ATmega328 內建 類比數位轉換器(Analog-to-digital converter,簡稱 ADC),預設會將 0V 到 5V 轉換為 0 至 1023 的數值。對於輸出電壓為其他範圍的電路模組,可以透過 AREF 與 analog Reference 函式,來提供參考電壓,例如對於輸出為 0V 到 3.3V 的電路模組,可以將 0V 至 3.3V 對應至 0 至 1023 的數值,獲得更高的解析度;實際上,A0 至 A5 也可作為數 位輸出、輸入腳位使用,此時 A0 至 A5 分別可視為 D14 至 D19。重置鈕與 Reset: : 控 制板左上方有個重置鈕,按下重置鈕會使得控制板重新執行使用者燒錄之程式,控制板 下方有個 Reset 腳位,當它處於低電位時,也會有相同的重置效果。 表 4- 4 馬達控制器接點功能表 D0 RX(Receiver) 序列埠傳送 D1 TX(Transmitter) 序列埠傳送 D2 數位輸出/輸入 D3~ 數位輸出/輸入 模擬類比訊號 D4 數位輸出/輸入 D5~ 數位輸出/輸入 模擬類比訊號 D6~ 數位輸出/輸入 模擬類比訊號 D7 數位輸出/輸入 D8 數位輸出/輸入 D9~ 數位輸出/輸入 模擬類比訊號 D10~ 數位輸出/輸入 模擬類比訊號 D11~ 數位輸出/輸入 模擬類比訊號 D12 數位輸出/輸入 D13 數位輸出/輸入 LED/燒錄用 A0 類比電壓輸入 A1 類比電壓輸入 A2 類比電壓輸入 A3 類比電壓輸入 A4 類比電壓輸入 A5 類比電壓輸入
數位接點
接腳代碼 功能類比接點
35
圖 4- 10 馬達控制器接點功能圖
圖 4- 11 馬達控制器 (Arduino Mega 2560 擴充模組) 4.4 步進馬達
步進馬達(Stepper motor; Step motor)是直流無電刷的脈衝馬達。步進馬達就是一 步一步前進的馬達,主要靠馬達內有齒輪狀突起(小齒)相鍥合的定子和轉子,當旋轉 時電流的流動不斷的切換流向定子線圈中並以一定角度(距離)逐步轉動的馬達;步進馬
36 達不需要運轉量檢知器(Sensor)或編碼器;步進馬達只需要通過脈波信號的操作即可 精準的定位,並讓操作物能在指定的目標位置準確地停止。 步進馬達只靠切換電流觸發器所需的脈波信號數量及每一步所跑的固定距離(角 度)乘積就能精確的到達所需的位置,且穩定性佳。 圖 4- 12 步進馬達的控制 [圖片出處: 维基百科] 圖 4- 13 步進馬達的轉系統組成的 3 要素 [圖片出處: 维基百科] 步進馬達是以基本步級角的角度為單位來進行定位。以 5 相步進馬達為例,其基 本步級角為 0.72,因此可以將馬達轉 1 圈分為 500 等分(=360 度 / 0.72),以此方式來 細分每次行進量做為定位基準。 圖 4- 14 步進馬達的步級角度 [圖片出處: 東方馬達]
37 步進馬達的步進角,即步進馬達之解析度(1 脈波的轉動量)依照步進馬達的規格 而定,例如:如下圖,定子數目有 12 個,包含 A、B、C 共有 3 組線圈繞組,轉子有 8 個凸極。 則步進馬達步進角=360° / ( 線圈組數×轉子凸極數 ) = 15°。亦即每接受一個脈 波訊號,步進馬達轉動 15°,若輸入 24 個脈波訊號則可旋轉一圈。因此只要控制輸入 脈波的數目,即可決定馬達轉動的角度。 圖 4- 15 步進馬達的步進角 [圖片出處: 東方馬達] 註: 步級角->於 1 個脈波的回轉量。 加減速斜率(Tr) 步進馬達在控制時,一般馬達在轉時從啟動到恆速需要有一段固定的時間(加速度 時間),相對的馬達在停止時也須一段固定時間(減速度時間)讓馬達停止;因速度對應到 時間上不是一步可及,因在啟動時必須要經過一段加速期後達到恆速區而停止時馬達處 於高速運轉無法立即的停止因慣性作用。 圖 4- 16 步進馬達的 Vs、Tr、Vo 此三者的關係 [圖片出處: 東方馬達]
38
轉速(目標速度,Vo)
步進馬達的速度,一般皆以 PPS ( Pulse Per Second) 來作單位。PPS 代表每秒轉多 少脈波,若要換算成 RPM 則需參考步進馬達的解析度才有辦法決定。
• 馬達 1 step = 1.8 度 (16 細分) 360 / 1.8 = 200 step
200 step * 16 pulse = 3200 pulse, 1 圈 = 3200 pulse • X,Y 1 圈 20 齒 , 皮帶 1 齒 2mm, 1 圈 = 40mm
X,Y 3200pulse / 40mm = 80 pulse/mm • Z 軸螺桿 1 圈 8mm 3200pulse / 8mm = 400 pulse/mm 圖 4- 17 步進馬達 42B4004T [圖片出處: FBTUG ] 4.5 真空泵( Vacuum pump ) 真空泵(即真空幫浦)其功用是將一局限空間中內的氣體排出局限空間外,製造局限 空間內呈現一個負壓環境(真空狀態)的機器其壓力小於一大氣壓;真空並非〝真正的空〞, 以目前技術所及的超高真空狀態,仍然會有可觀數量的氣體分子存在。 真空的常用單位:托耳(torr)
∵ 1 atm= 760 mmHg = 760 torr= 101,325 Pa(Pascal)= 101,325N/m2 = 1,013 mbar(毫巴,氣象學常用單位)= 1.03327kg/cm2= 7.6×105micron ∴ 1 torr= 1 mmHg=(101,325N/m2)/760= 133.32 N/m2
39 表 4- 5 真空範圍 真空範圍 壓力範圍(Pa) 低真空 105>P>3.3×103 中真空 3.3×103>P>10-1 高真空 10-1>P>10-4 非常高真空 10-4>P>10-7 超高真空 10-7>P>10-10 非常超高真空 10-10>P 圖 4- 18 真空幫浦 [圖片出處: FBTUG FB] 4.6 抽水馬達 抽水馬達也就一般常聽到的泵浦,泵浦是利用葉片在高速旋轉時產生離心力將外 部吸入的水經葉輪沿著切線方向向外拋出然後沿著泵殼將水排出管路外部。 圖 4- 19 抽水馬達
40 表 4- 6 DC12V 365 微型抽水馬達 規格表 4.7 USB 攝影鏡頭 鏡頭是由一塊或是多塊的凹、凸光學透鏡玻璃所組成的透鏡組。主要目的是利用 光學成像原理將外部的影像攝取入設備內;相當於人類的眼睛所看到事物再透過眼球將 看見的事物投射的大腦內部。
PC450 USB 攝影機是一個支援 Windows CE 及 Linux 雙平台的 USB 攝影 機產品。PC450 攝影機在英特爾的 X86 系列、安謀控股 ARM、美普思科技 MIPS 等的 處理器的指令集架構平台上有非常良好的攝影拍照效果。在 200MHz 的 ARM9 平台 在解析度 320 x 240 下每秒可顯示 25 影格數(320 x 240 @ 25fps)的視頻是流暢及穩定, 目前 PC450 USB 攝影機應用在視頻監控、遠端攝影和圖像分析等領域中技術已成熟。
41
表 4- 7 DPC450 USB 攝影鏡頭 規格表
4.8 UTM 工具
UTM 工具 (Universal Tool Mount)是 Mini FarmBot 在 z 軸上自動切換以執行不同 的工具操作;UTM 工具上方母座與下方工具架外觀型式是相同的利用強力磁鐵來讓上 下工具座做快速切換與連結。目前使用的工作如下圖片
42
UTM 外觀尺寸三視圖
圖 4- 22 UTM 外觀尺寸三視圖
UTM 母座線路接點型
43
表 4- 8 UTM 接點 & 功能表
圖 4- 24 UTM 母座控制器 4.9 土壤濕度感測器
土壤濕度感測器為內置穩壓芯片,電壓工作環境 3.3~5.5DCV 寬,可在 3.3V 的 Arduino 主控板上使用也可以正常工作。DF Robot-Gravity 接口可以直接與 GavityIO 擴 展板相連接。樹莓派之類的微型 PC,只需要外接一個 ADC(模擬信號轉數字信號)轉 換模塊就可以工作;外接螢幕或彩色液晶螢幕,一塊 Arduino 主板,就可以監控土壤含 水情形。土壤濕度感測器所對應的輸出,一般在空氣中 VWC 為 0%而在蒸餾水中約為
44 55%,因此越高的數值代表土壤含水量越高。土壤濕度感測器使用方便不需要太多維護 工作,可配合記錄器進行記錄土壤含水量變動。 圖 4- 25 土壤濕度感測器外型 表 4- 9 土壤濕度感測器檢測形式規格 圖 4- 26 土壤濕度感測器接線圖
45 圖 4- 27 土壤濕度感測器內部線路圖 4.10 元件架構圖/接點圖 圖 4- 28 元件架構圖/接點圖 4.11 機構骨架組裝 骨架組裝流程順序
46
龍門
圖 4- 29 龍門組裝圖
47
XY 軸
圖 4- 30 XY 軸組裝圖
48
Z 軸
圖 4- 31 Z 軸組裝圖
49
線路組裝
圖 4- 32 機構線材
50 成品圖 圖 4- 33 機構組裝完成圖 模擬機規格: 機台尺寸: 500mm (X)* 500mm (Y)* 800mm(Z) 耕種面積: 250mm * 250mm
51
第五章 軟體設計說明
5.1 單板電腦作業系統安裝
Raspbian 是為樹莓派所指定作業軟體,Raspbian 由一個小團隊進行開發的免費操 作系統,其軟體源自於 Debian 的作業系統;Raspbian 作業一統對 Raspberry Pi 單板電 腦操作有進行了優化,便於在 Raspberry Pi 上安裝使用。一般初學者在進行安裝 Raspbian 軟體時可透過使用 NOOBS 來安裝,NOOBS 利用圖像指南進行安裝操作方式,一步一 步的教導協助初學者進行安裝。
圖 5- 1 Raspbian 作業軟體最新版本 5.2 SD Memory Card 格式化
選用一個樹梅派使用的 SD card,首先透過 SD Memory Card formatter 格式化軟體 將 SD card 做格式化動作;將 SD 記憶卡的資料進行內卸除動作。
52 圖 5- 3 SD Memory Card 資料進行卸除畫面 5.3 硬體機構設定 再透過 PC 電腦到 MiniFarmbot 網站下載軟/硬體操作應用軟體,並將 MiniFarmbot 操作軟體檔案存入 SD card 內。 圖 5- 4 MiniFarmbot 網站下載軟/硬體操作應用畫面 完成上述動作後將 SD card 插入於樹梅派單板電腦內,並將滑鼠、鍵盤、網路與螢 幕接到單板電腦上後開啟電源。
53
圖 5- 5 樹梅派單板電腦開機後畫面 在指令欄頁面輸入安裝驅動指定
54
表 5- 1 驅動指令表
用於安裝 OpenCV 及其環境的指令表 sudo apt-get -y update
sudo apt-get -y upgrade
sudo apt-get -y dist-upgrade
sudo apt-get -y autoremove
sudo apt-get install -y build-essential cmake
sudo apt-get install -y python-dev python-tk python-numpy python3-dev python3-tk python3-numpy
sudo apt-get install -y python-imaging-tksudo python-tk idle python-pmw python-imaging
sudo apt-get install -y libgtk2.0-dev
sudo apt-get install -y qt5-default libvtk6-dev
sudo apt-get install -y zlib1g-dev libjpeg-dev libwebp-dev libpng-dev libtiff5-dev libjasper-dev libopenexr-dev libgdal-dev
sudo apt-get install -y libtbb-dev libeigen3-dev
sudo apt-get install -y ant default-jdk
sudo apt-get install -y doxygen
git clone https://github.com/opencv/opencv.git
cd opencv
git checkout 2.4
mkdir build
cd build
sudocmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D
BUILD_NEW_PYTHON_SUPPORT=ON -D INSTALL_C_EXAMPLES=ON -D INSTALL_PYTHON_EXAMPLES=ON -D
WITH_FFMPEG=OFF -D BUILD_EXAMPLES=ON ..
sudo make -j4
sudo make install
sudoldconfig
完成驅動指令後,就可進行啟動 Commander;在指令欄內輸入”sudo python gui_main.py”即可進入操作畫面。
55 圖 5- 7 Commander 操作畫面 移動控制: 移動量(100,500,1k,10k,100k):F1~F5 上/下/左/右 ↑/ ↓/ ←/ → ; Z-Up / Z-Downctrl +↑/ ctrl +↓ 圖 5- 8 移動控制 操作畫面 馬達步進速度設定: 圖 5- 9 馬達移動速動設定
56 相機連接設置: 圖 5- 10 相機連接設定 工作器具(補水、真空馬達)設置: 圖 5- 11 補水、真空馬達設定 農場模擬器運作腳本: 圖 5- 12 農場模擬器運作腳本設定
57 Arduino 的指令參數功能表: 表 5- 2 Arduino 的指令參數功能表 代碼類型 數 參數 功能 G G-Code代碼 G 00 XYZS 以絕對座標以軸的給定速度移動到位置(不必是直線) G 01 XYZS 移動到直線上的位置 G 28 將所有軸移回原位 F 農場命令,專門為farmbot添加的命令 F 01 T 使用時間以毫秒為單位的水量 F 02 N 使用測量脈衝的流量計計量水量 F 09 重置緊急停止 F 11 X軸 - 原點 F 12 Y軸 - 原點 F 13 Z軸 - 原點 F 14 校準X軸 - 測量長度+原點 F 15 校準Y軸 - 測量長度+原點 F 16 校準Z軸 - 測量長度+原點 F 20 列出所有參數和值 F 21 P 讀參數 F 22 PV 寫參數 F 23 PV 更新參數(校準期間) F 31 P 閱讀狀態 F 32 PV 寫狀態 F 41 PVM 在模式M(數字= 0 /模擬= 1)的arduino引腳上設置值V. F 42 PM 從模式M中的arduino引腳P讀取一個值(數字= 0 /模擬= 1) F 43 PM 在arduino中設置引腳P的I / O模式M(輸入= 0 /輸出= 1) F 44 PVWTM 在arduino引腳P上設置值V,等待時間T(以毫秒為單位),在模 式M(數字= 0 /模擬= 1)的arduino引腳P上設置值W F 51 EPV 使用I2C在工具架上設置一個值(未實現) F 52 EP 使用I2C從工具架讀取值(未實現) F 61 PV 將引腳P(僅引腳4和5)上的伺服設置為所需的角度V. F 81 報告結束停止 F 82 報告當前位置 F 83 報告軟件版本 F 84 XYZ 將軸當前位置設置為零(是= 1 /否= 0) E 緊急停止 C 攝像機命令,控制攝像機的命令 C 00 保存圖片
58 Arduino 指令參數的單位: 表 5- 3 Arduino 指令參數的單位表 Arduino 的指令參數編輯範例: Ex1 : 分別在 X 和 Y 和 Z 方向上移動 100,200,300 步 G00 X100 Y200 Z300 Ex2 : 將 Y 加速度的參數值更改為 300 F22 P41 V300 參數 描述 單位 X X運動 毫米 Y Y運動 毫米 Z Z運動 毫米 A X速度 步/秒 B Y速度 步/秒 C Z速度 步/秒 Q 隊列號 # T 時間 秒 N 數 # P 參數/引腳號 # V 價值號碼 # E 次要價值 # E 元素(在工具安裝中) # M 模式(設置引腳模式) 0 =輸出/ 1 =輸入 M 模式(讀/寫) 0 =數字/ 1 =模擬 XA x軸上的終點1 0/1 XB x軸上的終點2 0/1 YA y軸上的終點1 0/1 YB y軸上的終點2 0/1 ZA z軸上的終點1 0/1 ZB z軸上的終點2 0/1
59
第六章 實驗設計與分析
6.1 整體規格 材料準備: 表 6- 1 小白菜種植材料表 圖 6- 1 小白菜種子、花盆、培養土 6.2 種植步驟 a. 選擇無損傷、顆粒飽滿的種子 b. 在盆底鋪上 2 公分的底石,加入土壤及適量有機肥混勻 c. 種子均勻撒播於土上,再覆薄土(約 0.5 公分),並避免澆水時沖散種子 d. 種植約 3 天即萌芽,一週~ 二 週後生長本葉時,挑選健壯的植株繼續生長。 e. 種植約 10 天後投入肥料或噴灑有機液肥。 f. 約 30∼35 天即可採收。採收時可從較大株的開始,整株拔起即可。 注意事項: a. 日照 須有充足明亮的光線60 b. 土壤 肥沃、疏鬆、保水、排水良好之砂質壤土,須保持土壤濕潤,早晚各澆 一次水 c. 溫度 20∼25℃ d. 採撒播的方式栽種,種子要疏密適當苗株才能均勻生長。 6.3 植物成長變化 圖 6- 2 小白菜成長變化 6.4 小白菜實際成長紀錄 圖 6- 3 小白菜成長紀錄 天 1st 2nd 3rd 4th 5th 6th 7th 圖片 尺寸(cm) NA NA NA 0.1 0.3 0.5 1.0 天 8th 9th 10th 11th 12th 13th 14th 圖片 尺寸(cm) 1.4 2.0 2.5 2.8 3.5 4.0 4.5 天 15th 16th 17th 18th 19th 20th 21st 圖片 尺寸(cm) 5.3 5.8 6.0 6.4 8.0 9.5 11.2
61 6.5 成長辨識系統 我們利用 mBlock 的深度學習影像辨識系統來進行小白菜成長辨識,它是利 用建立模型方式來訓練模型機器,輸入大量圖像資料供其學習,進而增進其辨識 分類能力。辨識結果就能直接應用在影像辨識直接在設備上呈現結果。 圖 6- 4 深度學習之影像模組訓練 6.6 植物成長辨識測試與紀錄 a. 影像辨識模組 小白菜成長 2 週 圖 6- 5 小白菜成長 2 週 訓練模組
62
小白菜成長 2.5 週
圖 6- 6 小白菜成長 2.5 週 訓練模組 小白菜成長 3 週
63
b. 影像辨識統計數據
表 6- 2 影像辨識統計數據
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Min. Max. Avg
V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V V 99 94 88 99 95 99 92 95 95 88 95 92 90 95 88 99 95 99 94 90 99 95 90 99 95 99 88 99 99 95 99 92 88 99 97 97 95 88 99 92 90 99 90 90 92 90 88 90 90 95 99 90 99 99 95 90 99 95 95 95 99 99 95 92 90 88 90 99 配對成功與否 ( V / X ) 分析 配對成功率 Unit:% 20 20 20 比對模型 配對成功與否 ( V / X ) 配對成功與否 ( V / X ) 成長 2 週 樣本模型 成長 2.5 週 成長 3 週 95
![圖 3- 5 電容聚合物濕度感測器相對濕度響應曲線 [圖片出處:國立臺科大自動化及控制研究所]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8793867.221119/36.892.297.603.323.486/度感測器相對濕度響應曲線圖片出處國立臺科大自動化及控制研究所.webp)
![圖 4- 6 Raspberry Pi 3 Model B 外型尺寸圖 [圖片來源:樹莓派官網]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8793867.221119/45.892.169.730.111.452/圖46RaspberryPi3ModelB外型尺寸圖圖片來源樹莓派官網.webp)
![圖 4- 20 USB 攝影鏡頭 [圖片出處: FBTUG FB]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8793867.221119/54.892.283.609.153.489/圖42USB攝影鏡頭圖片出處FBTUGFB.webp)

