國立高雄大學資訊管理學系
碩士論文
無人載具航跡記錄
動態偵測目標定位之研究
A Study of Dynamic Detecting Target
Position by Analyzing the Unmanned Vehicle
Track Data
研究生:蕭詠芳 撰
指導教授:蕭漢威 博士
致謝
初至高大至今已近九年,雖然曾經離開三年,卻也經常回到學校,對於這一 個有藍天、白雲、草地且寧靜的校園,簡單的校園,有著過多的回憶,而在此期 間受到許多人的幫助,讓我得以完成我的學業,因而在此致謝。 首先感謝管理組的老師們,因為當初上資訊管理系我對於管理有諸多的不解, 我很慶幸來到這個科系,在進入到這個科系之前,我從沒有辦法理解社會科學的 重要性,因此我認為管理組的老師幫助我開拓過去從未擁有的思維領域,而不受 限於舊有的思維。而我也認為自己對於社會科學這一方面難以倚靠個人的努力深 入了解,因而有這樣的機會在這一個科系中學習令我感到非常幸運。而我也很慶 幸在這一個領域之中,至少還有一部分是我能夠相對學習得比較良好的,也就是 技術的部分,我非常感謝技術組的老師們,課業知識的教導,這數年來我時常能 感受到學海無涯,而老師們在課程上不斷地與時俱進,令我敬佩。另外,我想特 別感謝小明老師,在大學專題時,一步一步的教導我專題的程式如何編寫,讓我 在諸多方面都有所進步。到了碩士班,特別需要感謝明君姊,有許多與行政相關 的業務都需仰賴明君姊的幫助,才得以完成。我很感謝在105 這一屆回到學校就 讀碩士班,同學們都非常的有趣且樂於助人。 論文得以完成,必須感謝指導老師蕭漢威老師在此期間的教導。我的指導老 師對我而言不單是影響我的碩士論文,自專題起就受到老師許多幫助,而老師的 諸多想法對我而言,總有許多意料之外的新想法,並且能膽大和不畏懼失敗的試 驗新的事物。另外在許多事情上的看法,廣泛而深入,使我受益良多。感謝口委 陳灯能老師和楊新章老師,百忙之中撥空閱讀我的論文並給予我許多意見,令我 了解應當如何改善並使論文更加完備。 而從大學至今,蕭門的師兄弟更是對我有諸多幫助,感謝小芋學長、高手學 長、又加學長、至哲學長、皓翔、又升和駿瑋在各方面的協助。特別感謝cradle 學長,在技術上給予我諸多幫助,讓我得以完成我的論文。另外感謝從大學到碩 士都是好友的欣穎和佳君,在大學到碩士九年時光的陪伴和幫助,同時感謝佳君 留下來一盆植物,為了澆水我每天都有動力到學校。另外感謝大安森林的鳳頭蒼 鷹,陪我度過寫論文的時光。感謝我的雙親和兄姊對於我選擇回到學校就讀碩士 給予我支持,感謝我的父母給予我各方面的自由,無論是在最初的選擇或者後來 的諸多選擇。 最後,九年高大的時光,我很感謝過程中遇上的每一個人,一路走來所遇到 的每一個人無論是正面或者負面或多或少都給予我一些不一樣的想法。承蒙這些 不同的思維,我學到了許多,可能仍有許多不足之處,但在未來我所走的每一步 應該能更加踏實。 蕭詠芳 謹致予 國立高雄大學 資訊管理學系碩士班 民國一零七年七月無人載具航跡記錄動態偵測目標定位之研究
指導教授:蕭漢威 博士 國立高雄大學 資訊管理學系 學生:蕭詠芳 國立高雄大學 資訊管理學系摘要
隨著技術的蓬勃發展,且因無人載具 (Unmanned Vehicle, UV) 具備成本低、 地域限制低、風險性低與時效性高等特性,因而使無人載具成為研究與商業間備 受重視的議題。因應許多相關技術快速發展和普及,延伸無人載具的各類應用範 疇,特別是應用於追蹤探測方面,協助探測環境、物體等用途,運用無人載具搭 載探測儀器,能夠減少人力和風險之外,亦能根據全球導航衛星系統(Global Navigation Satellite System, GNSS) 精準判斷追蹤物體的地理位置,同時根據即時 探測出的數據進行分析,藉此判斷要追蹤的目標物位置。搜尋範圍通常不侷限於 一小塊區域中,而無人載具受限於運行時間、任務次數,因此減少搜尋的里程數, 降低無人載具的負荷,快速找到所需追蹤的目標物,便為一需要探討的研究問題。 本研究建立一套適用於無人載具在一疑似有目標物的區域中探索目標物,並 找出該目標物之地理位置的方法,在本研究中以無人載具搭載探測儀器所得數值 和GNSS 資訊作為航跡紀錄,動態、即時且快速的搜尋目標所在位置。本研究主 要分成三個程序搜尋目標物位置,由於搜尋的目標所在位置並不確定,因此先從 大範圍中,挑選出機率較高的搜尋區域,找出目標物的蹤跡後,再運用偵測數值 所歸納出的向量大小和方向逐漸逼近目標物,判斷出下一階段合適的搜索區域, 並逐漸縮小以更精密的搜索策略找出可能存在目標物的範圍,直至收斂出目標物 位置。此外並模擬分析不同的參數,測試其對於搜索效率的影響情況,以分析出 在不同情境下最適合的應用參數。 關鍵字:無人載具、探測追蹤、感測器數據分析、路徑規劃
A Study of Dynamic Detecting Target Position by
Analyzing the Unmanned Vehicle Track Data
Advisor: Dr. Han-Wei Hsiao Department of Information Management
National University of Kaohsiung Student: Yung-Fang Hsiao
Department of Information Management National University of Kaohsiung
ABSTRACT
Unmanned Vehicles (UVs) have been rapidly developed with the benefits of low cost, nearly no geographical restrictions, low risk and immediate response. Using UVs to tracking and sensing targets is very important for monitoring environments and detecting objects. Besides, using UVs equipped with sensors helps to cost down human resource and reduce risks. Positioning UVs location by Global Navigation Satellite System (GNSS) is very helpful for tracking targets. UVs are limited to operating time and flying distance, therefore it is very important to improve UVs’ capability when searching in a huge area.
As the result, the aim of this research is to find an uncertain located target by analyzing UV’s track data. Track data is based on UVs’ sensors data and GNSS data to dynamically and immediately detecting target position. This research will propose three programs to tracking the target’s position. Firstly, searching the region which has a higher probability of the target than the other region in a huge area. Continue searching until finding traces of the target. Secondly, getting magnitude and direction of vector by calculating track data to approach the target. Thirdly, narrow down the searching area and search the area more precisely until converge the target’s location. This program will also test the searching efficiency when using different parameter and analyzing the suitability for different situation.
目錄
圖目錄 ... vi 表目錄 ... vii 緒論... 1 第一節 研究背景 ... 1 第二節 研究動機 ... 4 第三節 研究目的 ... 6 文獻探討... 7 第一節 無人載具路徑規劃的相關研究 ... 7 第二節 無人載具追蹤目標物的相關研究 ... 9 第三節 無人載具探測目標物的相關研究 ... 10 研究方法... 12 第一節 系統架構 ... 12 第二節 巡航模式 ... 14 第三節 追蹤探測模式 ... 17 第四節 收斂模式 ... 20 模擬實驗評估... 22 第一節 模擬實驗方法 ... 22 第二節 模擬實驗結果 ... 26 結論與未來研究方向... 35 第一節 結論 ... 35 第二節 研究限制 ... 36 第三節 未來研究方向 ... 37 參考文獻 ... 38圖目錄
圖 1 . 台灣 PM2.5 2017 年 12 月 26 日分布圖 ... 5 圖 2 . 無人載具搜尋目標物所在地系統之系統架構圖... 12 圖 3 . 巡航模式系統架構圖... 14 圖 4 . 選擇機率最大的區域的演算法... 15 圖 5 . 搜索範圍巡航路線規劃... 16 圖 6 . 追蹤探測模式系統架構圖... 17 圖 7 . 收斂模式的系統架構圖... 20 圖 8 . 追蹤探測模式模擬找尋探測點... 21 圖 9 . 模擬目標所在地的環境... 23 圖 10 . 地面控制站監控畫面... 25 圖 11 . 現行窮舉探測法的路徑規劃 ... 32 圖 12 . 實驗的目標物位置... 34表目錄
表 1 . 無人載具應用範圍... 3 表 2 . 巡航模式 𝑑𝑓 臨界值 θ𝑐𝑟𝑢𝑖𝑠𝑒 的測試結果 ... 27 表 3 . 追蹤模式 𝑑𝑓 臨界值 θ𝑡𝑟𝑎𝑐𝑘 的測試結果 ... 28 表 4 . 探測結果與使用於計算向量的點之比例的測試結果... 29 表 5 . 追蹤探測模式向量大小倍率的測試結果... 30 表 6 . 計算收斂的點比例的測試結果... 30 表 7 . 區域機率較高者的數量和搜尋時間之關係... 31 表 8 . 現行窮舉探測法與本研究方法結果比較表... 33緒論
無人載具(Unmanned Vehicle, UV)在西元 1898 年 Nikola Tesla 製作出了第一 個遙控機器後,直至二次世界大戰重點發展無人飛行載具,無人載具伴隨軟硬體 技術的進步,其發展也漸趨完善,包含地面、水面和空中等多類用途的無人載具。 無人載具隨著科技的進步,技術門檻的降低,不單限於軍事用途,而逐漸被廣泛 應用於多種不同的領域,如科學研究、運輸、勘災等用途。本研究預計發展一套 適用於各式無人載具上規劃偵測路徑的方法,預期運用探測儀器搭載在無人載具 上,並在一疑似有目標物區域中,找尋目標物並找出其所在地。本章節將針對無 人載具的未來發展和應用,以及本研究技術開發的重要性進行說明。 無人載具為一無須人員搭載操控的行動載運裝置,通常藉由遙控或自動駕駛
控制,其中無人載具又劃分為無人飛行載具 (Unmanned Aerial Vehicle, UAV) 、 無人地面載具 (Unmanned Ground Vehicle, UGV) 、無人海面載具 (Unmanned Surface Vehicle ,USV) 和無人水下載具 (Unmanned Underwater Vehicles,UUV) 等載具。因近年來相關技術的開放原始碼釋出,促使進入無人載具的門檻降低, 且無人載具擁有成本低、地域限制低、風險性低與時效性高等特性,無論是商業 運用或研究學者陸續投入無人載具的領域,並結合無人載具應用在不同領域,而 無人載具漸被運用在多方面,因而被視為近年來全球市場發展的重要項目之一。 (1) 無人載具相關技術的發展 由於近年來無人載具不僅限於軍事用途,在商業和科學研究上亦廣泛應用於 多個不同的領域,因而相關的關鍵技術變得尤為重要,如控制系統、傳感器、平 台、負載量、多台控制或路線規劃等都是當前重要研究議題。有許多開放原始碼 資源中的控制無人載具的系統程式和其應用的硬體控制基礎電路都已被釋出,例
模式的無人飛行載具或無人地面載具,並能安全且穩定的運行。而軟體如 APM Planner 或者 Mission Planner 則作為地面控制站提供使用者能夠在運行的時候, 監控載具的航行狀況。而自主偵測模組對於無人載具而言是重要的發展目的之一, 可搭載各式傳感器、自動巡弋系統和無線傳輸模組,以達到遠距離測量一目標, 而無需由人親自前往測量,可大幅減低成本並提昇安全性。 (2) 無人載具的應用發展 無人載具因具有成本低、飛行風險低、地域限制低和即時性這四種特性,所 以除了早期被運用於軍事投放炸彈外,在現今無人載具的應用上,商業運用或者 研究單位乃至一般民眾都能運用無人載具,因而延伸出多個領域的應用。另外由 於開放原始碼被釋出,不同領域的研究學者或者產業能夠以較低廉的價格進入無 人載具的領域,並應用在其他領域上。 各大企業自2011 年後開始陸續投入資金,如 Tesla、Google 投入無人地面載 具的產業,並積極與所在國家商討法規的運行。而Amazon、Facebook 也積極發 展無人飛行載具並用於運輸包裹、提供通訊。另一方面,Yara International、Sea Machines Robotic 積極發展無人海面載具,預期能於 2020 年完成全自動貨運船 橫渡北大西洋。 而今無人載具被運用在的領域整理如表 1,在災害應變的應用上如快速的災 情探勘,而在環境監測則可以應用無人載具長期拍攝河川、水庫或海域,以了解 水庫周圍的生態環境或面積是否有變化,或者了解河川的顏色是否有改變,判斷 有無汙染的可能性。在科學應用上也可利用無人載具來近距離拍攝野生動物、監 測野生動物間的行為,或者計算候鳥的數量等。在都市計畫的應用上,內政部國 土測繪中心也將其用於量測國土,以作為更精準的應用系統的基礎,而近年來在 商業應用上也有許多應用無人載具的案例,如 Disney 利用無人飛行載具作廣告 拍攝或者以多台作娛樂表演。
表 1 . 無人載具應用範圍 用途 範例 軍事 戰場監控、通訊中繼、定位和搜尋目標[3] 環境監測 氣象觀測[4][5]、水文觀測[6][7] 救災運輸 災情調查、物資運送 都市計畫 量測國土、交通監視、通訊網路 農業輔助 噴灑農藥、監控農作物[8] 商業應用 廣告拍攝、娛樂表演 (3) 商業市場趨勢 各大企業自2011 年後開始陸續投入資金,發展無人機升空計畫,如 Amazon、 Facebook、Google 和 Disney,用於運輸包裹、提供通訊或者廣告。而在被稱做無 人機元年的2015 年,在國際性的電子產品和科技貿易展覽活動中,美國拉斯維
加斯舉辦的消費電子展 (Consumer Electronics Show, CES) 中也開設了無人機專 區,參展廠商至2016 年廠商數從 3 家提升至 20 家,時至 2018 年舉辦時已有 149 家廠商參展,無人飛行載具的相關技術是重要且可持續發展的項目。
Market Research Future (MRFR) 在 2017 年的分析報告中提及 2015 年時,全
球無人飛行載具的市占分配中,美洲達56%,歐洲、中東和非洲地區佔 25%,亞
洲 地 區則 佔 19%,而隨著更多企業如以色列航空航天工業 (IAI) 、Northrop
Grumman、Aeronautics Defense Systems 有限公司,Aeryon 實驗室,Aibotix,英 國航太系統公司(BAE Systems plc)、大疆創新有限公司(DJI)、洛克希德馬丁公司
和ProX 動力公司等企業加入開發,MRFR 認為在 2016 至 2021 年間,全球無人
飛行載具市場將以11%的複合年增長率成長。而 Strategic Defense Intelligence 則
從國防市場的角度探討從2015 年至 2025 年間,判斷無人飛行載具的市場將會持
續穩定成長,複合年均增長率 (Compound Annual Growth Rate, CAGR) 估計有 5.66%,並且無人飛行載具的市場總值預期將會達到 115.7 億美元。綜合前述無 人飛行載具在商業市場和國防市場均備受重視且會持續成長。
根據上述可知無人載具的市場逐年增長,且運用無人載具於一般商業用途、 科學研究到國土量測等開始備受各方重視,因而如何運用無人載具成為重要的課 題。而無論是在軍事、學術研究或者商業用途上,已有越來越多將無人載具應用 於協助追蹤或者偵測環境的狀況,係由於無人載具搭載儀器偵測可以降低成本、 風險,且能進行長時間監控,無論是在監控環境或者協尋物品都相較過去以人力 搜查更加快速,故現階段已有許多案例將無人載具運用於溪流監測、果園監測、 戰地監控等用途。 本研究主要是預期以無人載具的機動性,搭載可以在近距離偵測目標物的探 測儀器以找出目標物實際地理位置的偵測搜尋方法。其方法可在多項不同的應用 領域應用,例如可以應用於找出環境中 𝑃𝑀2.5 的污染源與在空難救災時即時找 出黑盒子訊號源地理位置,其較完整說明如下。 自工業革命以來,人們的生活品質提升,便利性也因科技提升更加方便,伴 隨而來的是自然環境受到人為嚴重破壞,空氣品質尤其明顯,由於燃煤發電、工 業廢氣、汽機車排氣、農業為堆肥而燃燒廢棄物以堆肥等因素,造成天空霧濛濛, 遠方的景色無法清晰可見,並影響人們的生活周遭。其中懸浮粒子更是在近數年 備受矚目,在台灣冬季時 𝑃𝑀2.5 的濃度居高不下,不僅對於民眾的身體健康造 成傷害,同時懸浮粒子伴隨著許多的化學成分,如硝酸根、硫酸根和胺根等,在 雨天時懸浮粒子伴隨著雨滴,導致土壤酸化並影響水源,對於地面上的生物與環 境造成長期損害。
圖 1 由環境感測器網路系統(Location Aware Sensing System, LASS)統計 𝑃𝑀2.5 即時感測資料呈現所得,此圖表示在 2017 年冬季時其中一日的 𝑃𝑀2.5 分
布圖,可以看出南台灣空氣污染的嚴重性,南台灣大部份都超過 35μg/𝑚3 以上,
綜合上述說明,懸浮粒子對地表產生多樣傷害,然而懸浮粒子散布在空氣之中, 並受到如風向、溫度等因素影響,使得難以評判導致空氣汙染的汙染源的所在位 置。儘管有少部份如2017 年時發生塑膠工廠燃燒的事件,整片天空都因大量的 化學物焚燒,而有嚴重的霧霾,能夠立即發現原因,但大多數情況下都難以判斷 造成 𝑃𝑀2.5 的確切原因。若能讓無人飛行載具運載探測儀器偵測 𝑃𝑀2.5 的濃度, 便能夠探測空中 𝑃𝑀2.5 的濃度,也有可能透過 𝑃𝑀2.5 濃度的高低判斷 𝑃𝑀2.5 是從哪個方向飄散的,因此利用無人載具偵測污染源的所在地是重要的研究議題。 圖 1 . 台灣𝑃𝑀2.5 2017 年 12 月 26 日分布圖 2017 年空軍幻象 2000 戰鬥機在台灣北部海域失聯,儘管在搜救過程中,曾 偵測到疑似救生裝備的無線電訊號,但難以判定位置,直至經過將近十日才得以 定位幻象機的墜海位置,無法於最佳救援時間找到。事後也僅能藉由將整個海底 以三維圖像的方式呈現,才得以找到大略的災害位置。綜合前述可知,若能以較 快速的方法找出訊號源位置,對於後續處理或援助能有更多幫助。另外如能利用
無人載具搭載偵測訊號源的儀器,因無須提供人員乘載,搜尋時可減少派遣的人 力,而且無人載具也無需長時間的休息,且時間和人力的需求皆能降低,且人員 可以更加專注於判斷是否可能為幻象 2000 的墜落點,因此利用無人載具偵測訊 號源的所在地應能有較大的幫助。 由上述二例可知,無論是用以搜尋 PM2.5或者是無線電波來源,若能利用探 測儀器協助搜索應能更快的鎖定目標物地理位置的範圍,更快速達到目的。而將 探測儀器搭載在無人載具上,可節省探索時所需的人力成本和人員協助搜尋時的 風險,同時也能對於一些不易於搜尋的區域進行探測,因而若以無人載具搭載探 測儀器搜索應能更快速且節省成本找尋到目標的地理位置。 基於研究動機的論述,本研究預計建立一套適用於無人載具探索一區域疑似 具有欲探索的特定特性之目標物,並令無人載具搭載探測儀器,以找出目標物位 置的目標物,如若要找尋 𝑃𝑀2.5 的汙染源則搭載探測 𝑃𝑀2.5 的儀器。過去探測 追蹤一目標物的位置需要消耗相當多的人力,而且在某些地區也不易進入搜尋, 如水面下、高地、洞穴,儘管人類能夠進入,但需要耗費將人運輸到當地的時間 和金錢,並且探索者也需具備極好的體力,才能進行長時間的探索,而長時間供 給探索的設備和資源也是備受考驗的問題之一,但無人載具並不受限於此,而且 也較為安全。因此將探測儀器搭載在無人載具上,可以減少探測人員所需面對的 危險,另一方面無人載具也能進入一些相對狹小的區域探測,加快探測的速度。 無人載具若是沒有規劃路徑而隨意探勘,相當容易忽略可能存在目標物的區域, 而以窮舉法搜索,也需耗費許多資源,若能以無人載具搭載探測儀器,可運用所 探測出的數值進一步協助動態的規劃路徑,將可使得無人載具得以更具系統性的 方式搜索,也無需耗費不必要之資源。因此本研究預期規劃一套適用於無人載具 動態搜索目標物地理位置的方法。
文獻探討
以無人載具在一疑似具有特定類型目標物的區域中找出目標物並找出其位 置所在,在設計上所需要的關鍵技術包含如何決定搜尋的路徑、搭載探測儀器的 無人載具、追蹤物體位置等問題。所需面臨的挑戰包含無人載具的續航力、負載 量以及傳感器的尺寸、精度、靈敏度等問題,儘管近期已有較多的文獻,但仍有 相當大的發展空間。本章將針對無人載具路徑規劃、無人載具追蹤目標物和無人 載具探測目標物的相關研究進一步探討。 無人載具的路線規劃為一個十分複雜的全局最佳化問題,需考量二維至三維 的環境中,最佳化、完整性、計算複雜性等問題,才得以在一個區域中,找出最 佳路徑。而目前無人載具的路徑最佳化問題多著重於與兩點間最短路徑和閃避障 礙物的問題,下述將分別針對最短路徑和障礙物討論。 在規劃路徑時,由於受到無人載具機體限制,必須考慮到物理可行性,如部 分無人載具僅能夠前進或者倒退亦可和轉彎幅度等重要議題皆需考量,因此直線 並非是兩點間最短距離。而在 1957 年 Dubins 等學者[9]提出一個在平均曲率約 束下的最小長度曲線,而後應用在無人載具上,使無人載具轉彎時能夠更為順暢且距離較短,稱為Dubins path。如 Chitsaz 等學者[10]即將 Dubins path 應用到無 人飛行載具上,並假定系統對於無人飛行載具的高度、速度以及無人飛行載具的 轉彎幅度均有獨立的控制限制,以此設計出一最佳路徑。Owen 等學者[11]也將 Dubins path 應用到無人飛行載具上,在該研究中專注於探討從原先二維的路徑 加入高度的要素探討,以最短的距離從原本的高度改變至另外一個高度,並且到 達目標位置。Lugo-C´ardenas 等學者[12]則提出一個給定翼機使用的系統框架, 由於定翼機僅能向前進,並且有迴轉半徑的限制,因此該研究運用路徑使得定翼 機能飛行的更為順暢。
而閃避障礙物在無人載具中是長久以來備受討論的議題,特別是在考慮無人 地面載具時,由於地面的壁障較多,促使無人地面載具前進時容易遭受到撞擊, 若能避免碰撞,便能減少機體的損害,亦能加快抵達的速度。以下則是當前相關 研究領域常應用之理論和其應用之方法。 在 推 算 路 徑 的 時 候 , 目 前 已 有 許 多 研 究 會 以 螞 蟻 演 算 法(Ant Colony Optimization, ACO)進行推算。螞蟻演算法是基於仿生學中模擬螞蟻行為方式所 產生的方法,當螞蟻為尋找食物目的離開巢穴時,通常會有大量的工蟻隨機移動, 且由於工蟻移動時,會在行走過的路徑留下費洛蒙,因此當一隻工蟻找到食物, 沿著路徑重覆搬運食物後,留下的費洛蒙可以提供其他工蟻參考,並且前往取得 食物。Perez-Carabaza 等學者[13]運用多台無人飛行載具並搭配螞蟻演算法追蹤 未知位置的目標物,其目的為在最短時間找到目標物。該研究提出一個基於螞蟻
演算法的離散決策變量的方法 Max–Min Ant System(MMAS) 到達一個或多個目 標的位置,能以最快速的方式讓多台無人飛行載具到達,並且將障礙物當作螞蟻
的資訊素,避開威脅。He 等學者[14]則研究在室內飛行無人飛行載具,由於室內
有範圍限定和眾多障礙物,無人飛行載具在飛行時會有碰壁的威脅,故利用螞蟻
演算法避開威脅。
另外一路徑演算法基於演化演算法(Evolutionary Algorithms),而 Zheng 等學 者[15]基於演化演算法提出一種使無人飛行載具在規劃路線時,評估空間中多台 的無人飛行載具,從而無需計算空間配置的問題,並根據特定領域的知識,考慮 不同任務的限制,處理環境中不可預見的變化,如航線距離、飛行高度。遺傳演 算法是演化演算法下其中一類,而 Han 等學者[16]則基於遺傳演算法(Genetic Algorithm)針對無人地面載具做路徑規劃的導航,藉由遺傳演算法判斷阻礙物體 的位置所造成的威脅性和與目標位置的距離兩者評估路徑的合適度,再判斷最適 合選擇的路徑。綜合上述研究,無人載具在路徑規劃已有相當多的理論支持運作, 然而多著重於已知目標位置的最短距離和避開障礙物上,對於找尋區域中疑似包
無人載具在追蹤目標物的研究中,多為追蹤動態目標,僅有少數是針對目標 位置未知的搜查並追蹤,但已有針對特定類型目標搜尋的研究,為藉由偵測物質 或電波進行追蹤的研究,下述將對此二類的研究分別進行探討。 Latheren 等學者[17]運用無人飛行載具追蹤氣體,分析雄蛾在交配時期尋求 雌蛾的追蹤方式,並將該方法運行在無人飛行載具追蹤二氧化碳在空氣中的來源。 在空中先預定飛行的高度,橫向探測資料,並以 z 字形縱向前進,探測空氣中 二氧化碳的濃度,而在有可能有目標源的地方,下降一定高度,以環狀繞行該點 探測。該方法會因風向而有影響,且僅能逆風探測,在順風的方向將會因探測儀 器與定翼機的機鼻同向,而致使無法探測到二氧化碳。另外,該研究也指出探測 的目的為二氧化碳,由於二氧化碳在空氣中的來源可能性過多,因而難以判斷。 另外也有將無人載具利用無線電波的方式,追蹤動物的位置。因土地開發過 剩,導致野生動物們居住地範圍縮小,Leonardo 等學者[18]為了解野生動物的棲 息 地 範疇 ,在 野生 動物 的 體內 或 體表 植入 一 低成本的 無線 射頻識 別(Radio Frequency Identification, RFID)標籤,由於該無線射頻識別所能被偵測範圍有限, 因此無法大範圍監控植有無線射頻識別標籤的野生動物活動區域。該研究利用無 人載具在一區域範圍中繞行並偵測目標物,並將所偵測到的數據傳至地面控制站, 以此監測野生動物的活動範圍。 綜合上述,無人載具追蹤目標位置的方法,當前已有用於氣體和電波相關的 研究,儘管仍受限於環境和探測儀器的量測誤差,但在可控制的因素下是可行的, 且偵測的目標類型不同也能透過不同的探測儀器協助找到,而藉由無人載具的即 時定位能確認目標物所在位置,因此本研究認為將無人載具應用在偵測空氣污染 源頭或者在找尋黑盒子上,能夠提升搜索的效率。
目前已知無人載具被應用於相當多不同類型的領域,而在探測物體這一方面, 通常是以窮舉法探測整個區域,確保不漏掉任何一個部份,並且以一特定區域長 期探測,以能夠監看該區域的變化為主。下述將會陳述無人載具探測目標物目前 所應用的範圍。 2015 年 Diaz 等學者[19]發表一新應用於無人飛行載具使用的系統 UAS-MS, 搭載多種氣體的探測儀器,如 𝑆𝑂2、𝑁2、𝐶𝑂2 等氣體,而該研究之目標為監測 活火山噴發的氣體,進一步了解火山氣體中的化學和物理物質,以降低火山對附 近區域的威脅。Peng 等學者[4] 在針對中國杭州地區 𝑃𝑀2.5 分布情況的研究中, 發現由於空氣汙染的物質會因風向、溫度和高度的因素而改變在空氣中分布狀況, 然而在高空中卻不易 以儀器探測,因而以無人飛行載具搭載探測儀器探測 𝑃𝑀2.5 ,並挑選遠離工業的區域,再評估不同的時間點,如清晨、早上、中午和 下午製作出 𝑃𝑀2.5 在空氣中的三維分佈圖。綜上可知,若能以無人飛行載具來 探測空氣中的氣體,便得以進一步了解當前空中的氣體變化。 Dugo 等學者[8] 在無人飛行載具上搭載高分辨率熱成像攝影機,透過偵測樹 冠層的溫度,可以了解果樹當前的溫度,判斷分佈在果園中的果樹是否有足夠的 水分。原因為果樹對於水分缺失相當敏感,無論是水分太少,以致於果樹不足以 成長良好,或者是水分過多,致使果樹根部潰爛,都是果農所在意的問題。然而 要確保在果園中種植區域的水分能夠平均分布是一件不容易的事,且不同類型的 果樹對於水分的需求也不盡相同,若能透過偵測樹冠層的溫度,可以了解果樹當 前的溫度,當前溫度過高可能是因為水分不足乾燥而造成的結果,因此在判斷哪 一個區域可能有不足或者過多的水分之後,果農就可以進一步的調整水源,使得 果樹得以獲得更好的照顧。 Ryan 等學者[20]提出一方式能協助美國海岸警衛隊的海上搜救任務的方法。 由於海上的範圍極廣,即使確認在特定區域,搜索方式未經過規劃也可能會導致
耗費更多不必要的時間,因此Ryan 等學者讓直升機搭載紅外線的攝影模組,並 針對直升機的轉彎幅度,偵測模組的量測誤差和搜索範圍,設計了自動規劃路線 的方法,使無人飛行載具能協助尋找罹難者。 綜合上述可知,無人載具搭載儀器是值得使用的方式,可以快速取得該區域 中的資訊,然而在探測時,大多數探測所有區域,需消耗相當多的時間跟金錢。 本研究將以探測出的數值作為分析之數據資料判斷目標存在與否且找出目標的 位置,以此既能達成探測物體的目標,亦能節省時間與金錢。並且根據第二節, 可以得知追蹤時,能以探測出之數據,由量測值少往多的區域尋找,因此本研究 認為搭載探測儀器搜索可提升搜尋的速度。
研究方法
本研究針對無人載具在一大範圍中,搜尋一特定特性之類型的目標物,且此 目標物的所在地理位置不明,以耗損較少搜尋時間和航行距離為目的搜索,找出 該目標物的位置。主要將在無人載具上搭載探測儀器,並利用無人載具所在地的 座標位置,並以探測出的數值高低和研究所設置之臨界值作為判斷目標物位置的 依據,分析並找出目標物的位置。首先,於第一節將陳述本研究之系統架構,此 一系統架構能應用在不同類型的無人載具上,如無人車、定翼機或者船舶載具等, 提供一個可適用於多類型環境之架構。後續三節中,將針對第一節所提出之系統 架構,詳加說明,並於最後產出目標物之所在位置。 在本研究中預期找出一目標物的位置,因此將利用無人載具本身的位置和探 測之目標物的量測值,由低往高找尋目標物可能的位置。本研究之系統架構如圖 2 所示,從開始至結束,共分三步驟:巡航模式、追蹤探測模式和收斂模式,並 且依序進行,以便於逐漸接近目標物,並於收斂模式結束後輸出目標物所在位置。 圖 2 . 無人載具搜尋目標物所在地系統之系統架構圖在巡航模式時,本研究從大面積的範圍中,將範圍分割為小範圍並挑選出其 中一個小範圍,粗略探測該範圍,判斷是否可能在目標所在地的附近。而由於難 以在抽取範圍時,能夠一次找到目標物所在的位置,故重複此動作,直到判斷搜 尋的範圍可能已在目標所在地的附近。 在追蹤探測模式中,預期劃分出目標物所在之區域。將利用巡航模式所偵測 到的點座標和量測值的數據,作為初始值並進一步分析,判斷出目標物的方向和 距離,決定下一個搜尋的探測點,並於探測點周圍來回巡繞偵測。而由於僅藉由 一次的方位和距離判斷,不一定能夠一次達成目的,因此重複偵測數值和分析方 位的動作,直到符合預設之標準為止。 在收斂模式中,預期取得目標物之位置。將以收斂搜尋的範圍作為找尋目標 物的方法,並利用每次搜尋區域時各點量測值的高低判斷目標物最可能的位置, 再判斷後可能的位置作為探測範圍的中心再規劃新的範圍,逐漸靠近目標物的中 心位置,以此判斷目標物實際的位置。
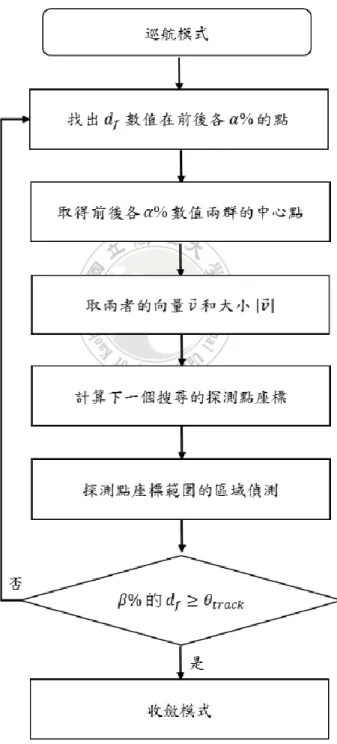
由於所需搜尋的範圍十分廣闊,無人載具通常受限於機體效能,無法將搜尋 的範圍進行窮舉法搜索,因此在此模式中的目的為尋求最快能達成找到目標物的 目的和降低無人載具的負荷,本研究提出一個從部分區域搜索目標物的方法,圖 3 為巡航模式之系統架構圖。本研究將先定義目標可能所在的位置,並劃分出搜 索範圍,並將搜索範圍切割成多個中區域。當不確定有任何區域可能有目標物的 情況下,以均勻分布的方式,給予每一個區域同樣的機率,作為接下來搜尋區域 時判斷的依據。但若有些區域特別可能包含有目標物時,則給予較高的機率,例 如搜索的目標物為懸浮粒子時,若該中區域有工廠的煙囪則給定較高的機率。反 之,若是空曠無物或森林草原的區域則給予較低的機率。 圖 3 . 巡航模式系統架構圖 而在接下來的步驟中,將利用各個分割區域的機率值作進一步的搜索,如圖
機率數值最大的數量有多少個,當機率大者,僅有一個時,則挑選該範圍為下一 個搜尋的範圍。而當機率最大者同時有多個時,則隨機從中抽取其一,作為搜索 的範圍。 選擇機率最大的區域的演算法 定義每個區域的機率: {[𝐴0, 𝑝0] , [𝐴1, 𝑝1], [𝐴2, 𝑝2], [𝐴3, 𝑝3], …[𝐴𝑁, 𝑝N]} 按機率排序:Sort {[𝐴0, 𝑝0] , [𝐴1, 𝑝1], [𝐴2, 𝑝2], [𝐴3, 𝑝3], …[𝐴𝑁, 𝑝N]} by 𝑝i DESC While 未在目標物附近時且仍在巡航模式: { 定義機率最大値為排序後第一個點:𝑝max = 𝑝0 for i in range(0, N) if 𝑝i == 𝑝max count ++ if count == 1 return 𝐴i∈ 𝑝max else
𝐴𝑟𝑎𝑛𝑑𝑜𝑚 = random select 𝐴𝑖∈ 𝑝max
return 𝐴𝑟𝑎𝑛𝑑𝑜𝑚 end if 判斷該區域是否在目標物附近 每個點的量測值:(x0, y0, 𝑑𝑓0),(x1, y1, 𝑑𝑓1),….(x𝑚, y𝑚, 𝑑𝑓𝑚) for i in range(0, m) if 𝑑𝑓𝑖> 𝜃cruise count ++ if (count/m) > 𝛾% go to 追蹤探測模式 else
probability of the area -= count
𝑚 × 𝛾% × 𝑝𝑟𝑜𝑏𝑎𝑏𝑖𝑙𝑖𝑡𝑦 𝑜𝑓 𝑡ℎ𝑒 𝑎𝑟𝑒𝑎
return to 搜尋新的範圍
end if
}
將選擇的區域作為無人載具的搜索範圍,考量部分無人載具僅能前進,因此 在規劃路徑時,以不可倒退僅能前進為前提,另外也定義搜索的密集度來決定航 點 (Waypoint) ,並以各個航點決定搜尋的模式。如圖 5 藍點為航點,紅線為搜 索之路線,並利用搭載在無人載具之偵測儀器,訂定時間的間隔取得偵測的數值 量測值 𝑑𝑓 。取得在紅線上多點的量測值,且因在每一點上都具有無人載具的座 標點,即可得到在此區域中𝑑𝑓的分布狀況。 𝑑𝑓 的數值將會以二維如 (x0 , y0 , 𝑑𝑓0),(x1, y1, 𝑑𝑓1),….(x𝑚, y𝑚, 𝑑𝑓𝑚) 的方式被記錄,分別將各點的經度、緯度和 量測值紀錄,並且一點即為一筆資料。 圖 5 . 搜索範圍巡航路線規劃 在下一個步驟中,將判斷該區域是否可能在目標物附近,先計算在這塊區域 中 𝑑𝑓 大於臨界值 𝜃𝑐𝑟𝑢𝑖𝑠𝑒 所含的比例,並確認是否符合預設之條件 𝛾% 。如果 符合進入追蹤探測模式,如果不符合則將該區域的機率值降低,以避免後續重複 搜尋到不可能的區域。不符合者將重新回到初始步驟,搜尋另外一個最有可能有 目標物的區域,直至找到符合者。最後在巡航模式中,將會找到一個附近或者在 該區域內就有目標物的區域,同時也能得到該區域的 𝑑𝑓 分布狀態。若無區域符
在追蹤探測模式中,預期能找到目標物所在的範圍。將利用在巡航模式中所
獲得的資料,並藉由目標物的量測值 𝑑𝑓 由低往高的方向逼近,逐步逼近目標物。
圖6 為追蹤探測模式的架構圖。
在獲得一區域各點 pi 的 𝑑𝑓 値後,由於需要在一區域中找出 𝑑𝑓 値低往高
的方向,因此必須先找出在該區域中,數值較小和較大的點。取出該區域中 𝑑𝑓
數值較大和較小的點,採用的數量為所獲取資料中 𝑑𝑓 値大小為前後 α 百分比,
即為將多個 pi 點取出 𝑑𝑓 値較大和 𝑑𝑓 値較小兩部份點集合,分別設為 Pmin 和 Pmax 兩群組集合。由於已知在該區域中,較大 Pmax 和較小 Pmin 群組的資料, 若能知道較大的群組和較小的群組兩者間的關係,便可以判斷與目標物之間的距 離遠近。因此利用下述公式分別求 Pmin 和 Pmax 二個群組各自的中心點,n 為共 有多少點,分別將 Pmin 和 Pmax 二個群組帶入公式,並以所獲得的兩點作為接 下來計算向量和距離的依據。 計算Pmin 和 Pmax 兩群組的中心點座標: (𝑥̅̅̅̅̅̅, 𝑦𝑚𝑎𝑥 ̅̅̅̅̅̅)𝑚𝑎𝑥 =∑ (x𝑖, 𝑦𝑖) 𝑛 𝑛 𝑖=0 = ( 𝑥0+ 𝑥1+ ⋯ + 𝑥𝑛 𝑛 , 𝑦0+ 𝑦1+ ⋯ + 𝑦𝑛 𝑛 ) ∀(𝑥𝑖, 𝑦𝑖) ∈ 𝑃𝑚𝑎𝑥 (𝑥̅̅̅̅̅̅, 𝑦𝑚𝑖𝑛 ̅̅̅̅̅̅)𝑚𝑖𝑛 =∑ (x𝑖, 𝑦𝑖) 𝑛 𝑛 𝑖=0 = ( 𝑥0+ 𝑥1+ ⋯ + 𝑥𝑛 𝑛 , 𝑦0+ 𝑦1+ ⋯ + 𝑦𝑛 𝑛 ) ∀(𝑥𝑖, 𝑦𝑖) ∈ 𝑃𝑚𝑖𝑛 Pmin 和 Pmax 中心點兩者間的向量 𝑣⃗ : 𝑣⃗ = (𝑥̅̅̅̅̅̅ − 𝑥𝑚𝑎𝑥 ̅̅̅̅̅̅, 𝑦𝑚𝑖𝑛 ̅̅̅̅̅̅ − 𝑦𝑚𝑎𝑥 ̅̅̅̅̅̅) 𝑚𝑖𝑛 Pmin 和 Pmax中心點兩者間的大小 |𝑣⃗| : |𝑣⃗| = √(𝑥̅̅̅̅̅̅ − 𝑥𝑚𝑎𝑥 ̅̅̅̅̅̅)𝑚𝑖𝑛 2+ (𝑦̅̅̅̅̅̅ − 𝑦𝑚𝑎𝑥 ̅̅̅̅̅̅)𝑚𝑖𝑛 2 藉由向量公式計算出兩者間的向量和大小,由於知道 Pmin 和 Pmax 的向量, 即可以判斷哪一個方向的 𝑑𝑓 是較高的,因此可以將向量作為下一個探測點方向 的依據。而藉由 Pmin 和 Pmax 間的向量大小,由於目標物通常是越靠近本體,量 測值越大,間距越小;距離越遠,量測值越小,間距越大。因此若向量公式所計 算出的值越大,可能是由於距離目標物還很遠,反之亦然,故將向量的大小作為 距離。基於前述本研究將 Pmax 的中心點作為原點,將向量作為方向,向量的大 小作為距離,求得下一個搜尋的探測點座標。 再下一個步驟中,針對所獲得的探測點座標,將探測點座標作為中心點,規 劃一個範圍作為探測的區域。在這個區塊中設立航點,再針對各點規劃航程,與
巡航模式中巡航取得航線上各點的 𝑑𝑓 的相同方式規劃路徑,以獲取該區域中 𝑑𝑓 分佈圖。 最後一個步驟中,將判斷該區域是否可能存有目標物。利用判斷該區域中點 的 𝑑𝑓 大於臨界值 𝜃𝑡𝑟𝑎𝑐𝑘 的比例,是否含有 𝛽% 以上的點, 𝛽% 為用於判斷 是否已達目標物的周圍,若已達到目標物地附近, 𝑑𝑓 大於 𝜃𝑡𝑟𝑎𝑐𝑘 的數量應佔 一定比例。如果符合,進入最後一個模式收斂模式。如果不符合,則將所獲得的 數值作為新的計算探測點座標的數據,重複收斂模式中第一個步驟,重新計算下 一個探測點的座標,直到搜索到可能有目標物的位置。因此在追蹤探測模式中, 將找到一個具有目標物的範圍,並且也能得到該區域的 𝑑𝑓 分佈狀態。
收斂模式預期產出追蹤的目標物座標位置。利用追蹤探測模式所定義的範圍, 在這個範圍中,逐漸縮小搜索範圍和航點間的間隔,並更密集的巡航獲得該搜索 區域更完整的資料,重複縮小範圍至已能在目標物相當靠近的距離時,便得出追 蹤目標點的座標。圖7 為收斂模式的系統架構圖。 圖 7 . 收斂模式的系統架構圖 收斂模式開始運作時,先從追蹤探測模式中所搜尋到的範圍中 𝑑𝑓 較大的數 個點取中心點,作為下一個探測範圍的中心點。圖8 中淡綠色的區域為追蹤探測 模式得到的範圍,而紅點為目標座標,圖中墨綠色的點1,並以點 1 向外定義出 一個區域,作為新的探測區域,如圖中綠色的範圍,該區域為原先巡航範圍的 1
倍大小,且將原先巡航的間隔寬度和探測儀器偵測的時間之間距縮短為原先巡航 時間距的 12 倍,取得更為詳細的資料,更精確了解該區域量測值的分布狀況。 圖 8 . 追蹤探測模式模擬找尋探測點 而在獲得新的區域量測值分布概況後,取 𝑑𝑓 值較大中前 e 百分比的點,計 算取出的點之中心位置作為計算下一個探測點。由於所探測出的中心點仍可能會 因為所探測的間距仍然過大,以致於偵測出的點無法焦距在一個區域,被散落在 不同位置上的點所影響,致使找出的位置並不是真正的目標。因此將重複尋找分 析下一個探測點,並且縮小搜尋範圍和間距,如圖9 的點 2 為縮小多次後的探測 點,當第n 次縮小時,縮小搜尋間距為收斂模式的 2−𝑛。 而在上述的過程中,已將目標位置收斂到一個足以判斷目標物的範圍之中, 因此可以判斷在該區域中,已有本次搜索的目標。並從方才步驟中,取得在該區 域中的所有點,選取 𝑑𝑓 值較大中前 f 百分比,可視為目標就在這些點的中心, 將這些點以中心座標公式計算,作為追蹤目標點的座標。
模擬實驗評估
在上一章本研究所提出的無人載具航跡記錄動態偵測目標定位的方法,在本 章中進行模擬飛行偵測的實驗評估。由於需驗證本研究的動態目標定位方法若以 真實的飛行載具來進行實地飛行,則可能會因飛行參數調整而產生的飛行載具的 危安事件,並且也受限於偵測設備與實際環境的干擾與誤差,本研究則以模擬載 具飛行偵測的模擬實驗環境來進行參數的比較與調整並更進一步的與目前的偵 測方法進行比較。本章一共分為兩個部份,分別為飛行模擬的實驗方法和模擬的 實驗比較結果。模擬實驗方法將會先陳述模擬實驗的環境和介紹現行探測目標物 之方法,再介紹航跡資料。實驗結果會針對參數進行測試,並針對結果分析。另 外實驗結果亦會比較本研究提出之方法與目前現行搜索方法進行實驗比較。 本節說明無人載具追蹤探測系統實驗方法。本研究以無人飛行載具為模擬試 驗的載具,並模擬在一個區域中有一個目標物的環境,搭配模擬器進行模擬無人 載具的航行概況,且意圖評估現行探測目標物的方法與本研究之方法的差別,因 而本節將針對四個層面說明,包含模擬實驗環境、現行探測方法、測試進行方式 和航跡記錄介紹。模擬實驗環境說明模擬目標物在區域中分佈狀況的方法。現行 探測方法則會闡述現階段如需要探測目標物的所在地所運用的方法。測試進行方 式提出運用模擬器模擬現行探測方法和追蹤探測系統航行的方法。航跡記錄介紹 則會針對追蹤探測系統分析及追蹤目標物時,所需要的資料取得及運用方法進行 說明。 模擬實驗環境 本研究將會模擬實驗環境進行實驗評估,利用下述公式計算所得。設 𝑥𝑡 和 𝑦𝑡 為目標物之座標位置, 𝑥 和 𝑦 為各點之座標,設定目標物所在位置的訊號 量測值的 𝑑𝑓 的數值為 100,並模擬其餘區域內各點的訊號量測值以目標量測值除以各點離目標物之距離,並開根號乘以10,如公式(1) 所示,而距離加一的目 的是避免分母為零,使得模擬計算出各點量測值時,距離目標物越遠的點訊號量 測值越小,反之,距離越近則訊號量測值越大,從而使得目標物附近和非目標物 附近有明顯的差別。 𝐷(𝑥,𝑦) = (√(𝑥−𝑥 100 𝑡)2+(𝑦−𝑦𝑡)2+1 ) ∗ 10 (1) 其模擬出的平面各點訊號量測值結果如圖 9,圖中為一個二維陣列,所包含 的值有航跡紀錄的座標位置,而是探測儀器所能探測出的數值由 z 軸呈現,其 中顏色越深和高度越高代表偵測出的目標數據越大,反之則愈小。從圖中本研究 所設定的目標物位置 (𝑥𝑡, 𝑦𝑡) = (60, 70) 由圖 9 中可以明確的發現當 x 為 60, y 為 70 時,D(60, 70) 值為100,而周遭的 D(x, y) 值則隨著距離越遠,數值越小。 而在本研究中透過航行的範圍、航行間隔的大小、航行速度、目標的臨界值這些 可調控的參數調整,找到目標物的區域,並且可以分析參數的調整是否能夠協助 此方法能更快速的找到目標區域。在以下的模擬實驗中 D(x,y) 單位為目標物位置 的訊號量測值的百分比,是以目標物所在位置探測出訊號量測值的數值對應D(x,y) 數值為 100% 時,其他座標位置的訊號量測值數值則以相距於目標位置的距離 成反比。 圖 9 . 模擬目標所在地的環境
現行探測方法介紹 若要針對一區域判斷是否含有欲探測的目標物,現行的做法為以窮舉法探測 以之字形的方式來回飛行探測整個目標區域,直到找到目標物之所在位置。根據 目標區域的範圍和意圖探測的量測誤差,在設定航點時,會先決定二航道間的距 離,以決定涵蓋率和探測的頻率,距離設定的越窄和探測的頻率越頻繁,探測的 資料便會更加密集。而判斷是否找到目標的方法為設定臨界值,達到臨界值即可 視為找到目標物,並將該點視為目標物之所在位置。臨界值的大小受到搜尋的間 隔和頻率所影響,因為當臨界值設得越大,則可能忽略已經相當靠近目標物的情 況,另外也可能目標物未達所訂定的臨界值。而當臨界值設得越小,則可能搜尋 的結果距離目標物太遠又或者誤判目標,實際上並未成功找到目標物。因此在定 義臨界值時,需考量目標物本身實際的量測值,再定義臨界值的大小,才能更精 準的找到目標物。 測試進行方式介紹 本研究之追蹤探測方式會因目標物可能並不存在偵測的範圍內或者飛行高 度的限制,難以證明探測到的結果是否真實存在目標物。另外測試過程中,所需 飛行歷程時間相當長久,航行過程中可能會損壞多台無人載具,且在航行過程中 存在相當多的不確定因素,可能導致偵測後的結果不正確。因此為節省成本和降 低其他自然界造成的不確定因素,本研究使用ArduPilot 提供的 SITL(Software In The Loop) 模擬器進行測試。另外本研究將採用 ArduPilot 控制無人載具, ArduPilot 為一自動駕駛的開源軟體,運用於多種無人載具類型,包含汽車、船、 旋翼機和定翼機。本研究則以旋翼機作為模擬追蹤的載具,因本研究搜索範圍較
小,而旋翼機在航行時較不受機體限制影響,能較準確的通過航點,也能在較小
的距離中轉彎,可以減少變因,再藉由地面控制站(Ground Control Station, GCS)
連接模擬器如圖10,能監控無人載具測試時航行的狀態,再運用一可與 ArduPilot
夠即時透過分析的資料改變航程。 而由於本研究所需之記錄除座標位置尚有 𝑑𝑓 値需記錄,因而本研究將會利 用第一節中模擬實驗環境的計算方法,先在搜尋範圍內隨機定義目標的位置,再 產生探測區域中的 𝑑𝑓 値分佈圖,並於航行過程中,運用無人飛行載具所得之位 置和 𝑑𝑓 値分佈圖取得探測點的 𝑑𝑓 値,並記錄和分析。而本研究將分別以現行 探測方法和本研究之方法航行測試,評估兩者間的差別。 圖 10 . 地面控制站監控畫面 航跡紀錄介紹 本研究在模擬飛行的過程中時,記錄座標位置和量測值 𝑑𝑓 的各項數值,其 中座標位置取自於模擬器中無人載具的數據,能夠即時透過 ArduPilot 獲取數據, 而 𝑑𝑓 値則是藉由模擬實驗環境的公式中所取得。運用這些參數可以得知在搜尋 範圍中,每一個座標位置中 𝑑𝑓 値,即可得知在此一範圍中,偵測的對象 𝑑𝑓 値 在搜尋區域分布的狀況。而搜尋的結果也會因探測時的時間間隔、航點間隔距離 的因素影響在一個區域中,探測到的資料密集度也會不相同。同時可能會造成在 分析資料時,所探得之結果的量測誤差有相關聯,越密集探測則取得之結果離目 標越相近,反之則越遠。
本節中針對模擬實驗後的結果評估差異,以搜尋所需的時間和與目標之距離 二者作為評估方法。根據模擬實驗的結果來進行參數的測試,以找出適合應用的 範圍。本研究之目標搜尋 𝑥 座標的範圍為 840 公尺、 𝑦 座標的範圍為1500 公 尺。本研究分別針對 𝑑𝑓 臨界值、計算向量的 𝑑𝑓 比例和向量倍數,以及和窮舉 探測搜索方法進行比較。根據每一次的參數調整,重複運行 10 次再取平均值做 為比較的基準,例如對巡航模式的 𝑑𝑓 臨界值 θ𝑐𝑟𝑢𝑖𝑠𝑒 的測試分別測試10%、30%、 50%、70%、90%時,每項模擬實驗均測試 10 次,並且每項數值分別取量測誤差、 搜尋時間和距離的平均值。 再比較實驗所得結果,分為兩個比較方式,一為搜尋時所消耗的時間,而搜 尋時間則是搜尋時總共消耗的時間,時間越短代表能更快速找到目標物,而與目 標距離的位置越近,能更為精準的找到目標位置。二為量測誤差,以搜尋所得目 標的位置與實際目的位置比較距離,以公尺表示,當量測誤差的數值越小,則代 表量測結果越精準。 𝑑𝑓 臨界值 θ𝑐𝑟𝑢𝑖𝑠𝑒和θ𝑡𝑟𝑎𝑐𝑘 在本研究中分為三個階段探索一疑似具有目標的環境,判斷目標是否存在和 目標的位置,而不同的階段因為與目標的距離接近的程度不相同,而在巡航模式 和追蹤探索模式中都以 𝑑𝑓 臨界值 θ𝑐𝑟𝑢𝑖𝑠𝑒 和 θ𝑡𝑟𝑎𝑐𝑘 來判斷是否達成逐漸靠近 目標物的目的,因此巡航模式和追蹤探索模式均測試 𝑑𝑓 臨界值此一參數。首先, 在巡航模式中,將搜尋的範圍分為10 乘 10 共 100 個區塊,每次探測的範圍 𝑥 座標的範圍約為84 公尺,𝑦 座標的範圍約為 150 公尺,間隔由西往東,分為五 段,因此間隔約為30 公尺。在巡航模式的控制項中包含臨界值和到達臨界值的 點所需的比例,因此本研究取在一區域中含 1% 達臨界值者進行測試。且本次 研究的間距以10 為單位測試臨界值,而各個區域之機率值則以均勻分布的方式 賦予相同的數值。所得結果如表2,表 2 共有四欄,分別為巡航模式 𝑑𝑓 臨界值
θ𝑐𝑟𝑢𝑖𝑠𝑒 、量測誤差、巡航模式的搜尋時間和搜尋距離,其中量測誤差和目標座標 位置距離均以公尺為單位,而搜尋時間以秒為單位。根據表 2 所示,臨界值在 10% 到 40% 之間量測結果與目標物實際位置之距離約在 160 至 210 公尺之間, 而航行時間在臨界值 10% 到 20% 之間有較大的變化,約從 2819 秒到 6379 秒, 而臨界值 20% 到 40% 之間變化量較小,從 6379 秒到 7812 秒。而臨界值為 50 時,量測誤差降至112 公尺,但所消耗的時間則增至 9800 秒。因而選擇臨界值 時,應以無人載具的機體限制決定臨界值的數值,無人載具的機體所能航行的距 離為主,當無人載具可航行距離較短時,選擇臨界值在 10% 至 40% 之間,而 若能航行較遠者,選擇航行距離在 50% 至 60% 之間,70% 以上由於模擬實驗 過程中會由於間隔太寬而無法達成臨界值的條件,因而未被列出。 表 2 . 巡航模式𝑑𝑓 臨界值θ𝑐𝑟𝑢𝑖𝑠𝑒的測試結果 巡航模式 𝒅𝒇 臨界值𝛉𝒄𝒓𝒖𝒊𝒔𝒆 (%) 量測誤差 (m) 巡航模式時間 (s) 巡航模式距離 (m) 1 679.20 320 3624.77 10 160.74 2819 26122.33 20 211.81 6379 58118.84 30 211.92 6679 60945.86 40 211.26 7812 70501.68 50 111.85 9800 88243.60 60 119.46 10986 98900.69 70 83.70 11169 101283.38 在追蹤探測模式的階段中,因已能取得巡航模式所得之結果,故能確認目標 物已在附近。另外因是在巡航模式探測之後,因此用以判定在目標物附近的臨界 值,應設高於巡航模式,以便能夠更逼近目標位置。本研究測試時會連同巡航模 式一併進行測試,以巡航模式的臨界值為 20 進行測試,其他設定與巡航模式測 試量測值臨界值的條件相同,而計算 𝑑𝑓 較大值和較小值各自的中心可取得的向 量大小,在此次測試中,將向量大小設為 1 倍。而由於巡航模式 𝑑𝑓 臨界值為 20%,故追蹤探測模式的臨界值設最低值為 30%,最高測至 90%。每次探測的範 圍為 𝑥 座標的範圍約為 84 公尺,y 座標的範圍約為 150 公尺。所得結果如表
3,表中共有四欄,分別為臨界值 𝛉𝒕𝒓𝒂𝒄𝒌 、量測誤差、航行距離和航行時間,可 以發現到臨界值越大,探測點距離目標物就越近,在臨界值為80% 到 90% 時, 量測誤差均約為 60 公尺,已是當前量測所得最靠近目標物之位置。而當探測的 臨界值為 60% 時,探測時間上升許多,而臨界值 80% 之後,搜尋時間又減少, 臨界值 90% 的搜尋時間又遠大於臨界值 80%,因此選擇臨界值 80% 應為最適 合之方式。而每次探測的涵蓋範圍為𝑥 座標的範圍約為 84 公尺,𝑦 座標的範圍 為150 公尺,在大多數情況下,應能將目標物涵蓋在搜尋範圍之內。而在後續的 小節中會針對向量的 𝑑𝑓 比例和向量大小的倍數做進一步的測試。 表 3 . 追蹤模式𝑑𝑓臨界值θ𝑡𝑟𝑎𝑐𝑘的測試結果 追蹤模式 𝒅𝒇臨界值𝛉𝒕𝒓𝒂𝒄𝒌 (%) 量測誤差 (m) 追蹤探測模式 時間(s) 追蹤探測模式 距離(m) 30 114.09 796 6720.52 40 96.98 881 7322.70 50 93.17 768 6442.14 60 80.45 1786 15083.63 70 63.87 2284 19358.91 80 60.70 1222 10129.4 90 57.51 3418 28456.83 探測結果與使用於計算向量的點之比例 追蹤模式中向量中的方向係藉由每次探測一個範圍所得的數個點中取 𝑑𝑓 較大值和較小值計算而得,而取多少比例的點將影響向量的方向和大小。若比例 取的較多,將可能導致 𝑑𝑓 值範圍較廣,取出的點位置過於分散,計算出的向量 方向和大小可能會有偏差,比例取的較少又可能導致無法呈現較大和較小值分佈 的範疇,而無法找出適合的向量方向和大小。因而需找出向量的點所佔比例適合 的數值,測試的方式巡航模式依據前述所測,並以追蹤探測時 𝑑𝑓 臨界值為 80% 時,測試計算向量的點所佔的比例,測試的比例為 1% 到 2 % 之間,僅測試 1% 和 2% 是由於 3% 時搜索的時間遠大於 1% 和 2% 時,且不斷在目標物的周 遭徘徊,而無法找到目標物的實際位置。實驗所得結果如下表,表中共有四欄,
分別為計算向量的點所佔比例、量測誤差、追蹤探測模式的航行距離和時間。從 此表中可看出將向量的點所佔比例調升,並無法有助於更快速的找到目標之位置, 同時量測到的位置,也距離實際目標物的距離更加遙遠,因而應當維持在取 1% 的點時,得以最快且精準找到目標物。 表 4 . 探測結果與使用於計算向量的點之比例的測試結果 探測結果與使用於 計算向量的點之比例 量測誤差 (m) 追蹤模式時間 (s) 追蹤模式距離 (m) 1% 60.70 1222 10129.40 2% 80.90 2043 17181.03 向量大小的倍數調整 在追蹤模式中,搜尋的範疇決定於探測點,因決定探測點位置的方法是相當 重要的問題,而其中影響探測點的因素除了前一部分計算向量的點比例之外,尚 能調整向量的倍數,以求更快速的找到目標物。調整向量大小的比例,能調整接 近目標物的距離,而不至於要花更多時間才能達到目的,若向量大小太大,則可 能導致每次探測點的位置太遥遠而要耗時較久。反之,也可能因距離太近,而使 搜索時超過目標所在的範圍,因此需測試出適合的參數數值,以達成搜索目的地 的方法。而在向量的倍數調整測試時的條件為巡航模式 𝑑𝑓 臨界值為 20%,追蹤 探測時 𝑑𝑓 臨界值為 80 和向量的 𝑑𝑓 比例為 1%值時進行測試。測試向量為 0.5 倍、1 倍之間,1 倍以上因 1.5 倍和 2 倍都有不斷在目標物附近徘徊的現象,卻 無法達成追蹤探測限制的條件,因而僅測試1 倍以下。所得結果如表 5,表中共 有四欄,分別為計算追蹤探測模式的向量大小、量測誤差、追蹤探測模式的航行 時間和追蹤模式的航行時間,兩者與目標之距離大略相同,主要比較航行消耗的 時間,向量為0.5 倍時能以向量為 1 倍時,約一半的搜尋時間達到目的,因而選 擇以向量為0.5 倍時能更節省時間。
表 5 . 追蹤探測模式向量大小倍率的測試結果 追蹤模式向量大小倍率 量測誤差(m) 追蹤模式時間(s) 追蹤模式距離(m) 0.5 56.96 494 4144.11 1 60.70 1222 10129.40 計算收斂的點比例 進入收斂模式後會以縮小搜索的間隔和範疇,所蒐集到的資料將更加密集, 達到收斂範圍的目的。而因集中收集該區域數值較大的數個點,故測試在探測出 的數值中較大值所佔比例,測試 1% 到 3% 之間,而本次測試所收斂的次數均 為 3 次,最終的範圍和間隔為巡航模搜索時 2−3 倍。所得結果如表 6,表中共 有四欄,分別為計算收斂的𝑑𝑓比例、量測誤差、收斂模式的航行距離和收斂模式 的航行時間。其中 1% 跟 2% 時,距離目標物都約在 2 公尺,而 3% 至 10% 之間量測結果所需要消耗的時間和距離都差不多,且均距離1 公尺以內,已能相 當靠近目標物,其中 8% 量測誤差最低,並且在 10% 時量測誤差變得較大。 表 6 . 計算收斂的點比例的測試結果 計算收斂的點比例 量測誤差(m) 收斂模式時間(s) 收斂模式距離(m) 1% 2.79 194 1282.24 2% 2.34 359 2106.88 3% 1.03 522 2850.34 4% 0.74 521 2828.67 5% 0.75 520 2829.88 6% 0.65 527 2896.62 7% 0.97 526 2917.17 8% 0.47 524 2883.54 9% 0.48 526 2918.97 10% 0.61 524 2920.09 設定區域機率 因應本研究之方法會在巡航模式開始探測前,針對搜尋的範圍中將較有可能 的區域定義為較高的機率,因此為在測試有差別機率的情況下,調整較高機率的 區域數量,比較搜尋到目標物的速度,以搜尋時間作比較,時間越短為越快搜尋
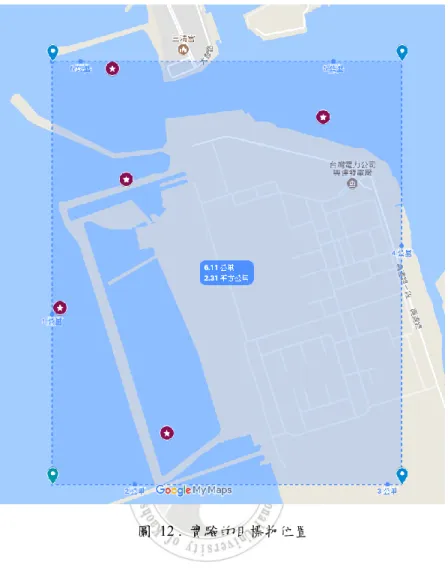
到目標物。其中將機率較高區域的數量設為 k,這 k 個數量的區域中表示較其 他區域有更高的機率會出現可能的目標位置,也表示若能在 k 個區域的重點區 域中發現目標物,將更有效的偵測出所在的目標位置。在模擬實驗時對於不同的 k 值條件分別測試 3 次,而每一次的模擬實驗都是隨機重新產生出不同的實驗目 標位置與區域機率的分佈,分別模擬實驗後再取搜尋時間的平均值,以比較k 值 不同時,所造成的結果。所得結果如表7,表 7 共有 2 欄,分別為 k 和搜尋時間。 大多數當k 越大,搜尋時間越久,k 值為 25 時相較 k 值為 20,搜尋時間較短, 但仍遠大於k 為 15 時所需的時間。而以現行的窮舉探測法平均搜尋到目標的時 間約為3000 秒,由此可以看出若能明確的標示出可能的目標區域則可以大幅的 降低搜尋所需的時間,並且在儘管只標定出多個目標區域的情況下,相較於窮舉 探測法所需搜尋時間也大幅縮短。 表 7 . 區域機率較高者的數量和搜尋時間之關係 k 搜尋時間(s) 1 335 5 1636 10 1650 15 1910 20 4491 25 2794 現行窮舉探測法與本研究方法比較 在運用前述幾節測試後之結果後,對於本研究所提出的方法與現行窮舉探測 法進行模擬實驗比較,針對此二者的結果比較行進的時間和與目標之距離。本研 究實驗模擬時的範圍從緯度 22.848249 到 22.863279,經度從 120.188962 到 120.202446,區域大小為 𝑥 座標的範圍為 840 公尺、 𝑦 座標的範圍為 1500 公 尺,模擬實驗的範圍為高雄市興達港的區域,若欲測量 PM2.5 的來源,因該位置 上有興達港火力發電廠,為相當有可能存在目標物,因此以該區模擬實驗環境。 測試的方式將起點和目標物的位置設置為相同的位置,共分別測試五次,並在搜 尋範圍中隨機定義五個點作為目標位置。
在現行窮舉探測法中,將整個範圍定義航點,如圖12,間隔設為與巡航模式 測試參數時經度為相同間隔,也就是說探測的 𝑥 座標的範圍約為 840 公尺,間 隔約為30 公尺,共約有 100 個航點,並同樣為 1 秒鐘取一次數值,並由緯度低 往高搜尋,由經度小搜尋至大,也就是從西搜尋至東。當所探測的數值大於60% 時則判斷找到目標物,原因為在測試時若設臨界值為 70% 以上在設定的間隔大 小中,在部分飛行路徑的配置情況下,將無法找到目標物。而當探測所得的值符 合所訂立的臨界值時,將探測到的點設為量測的位置,並與實際目標評估誤差距 離,並估算航行的時間,並與本研究之方法進行比較。 圖 11 . 現行窮舉探測法的路徑規劃 本研究之方法則將區域分隔為10 乘 10 個區塊,並根據不同區域定義不同的 機率值,若有涵蓋到目標物方圓150 公尺以內的區域者,給予較其他區塊高一倍 的機率值,以此作為本研究預測較可能具有目標物之區域。並依循前述中所測試 過的參數值進行測試。將巡航模式 𝑑𝑓 臨界值設為 20%,追蹤探測模式臨界值設 為80%,向量的 𝑑𝑓 比例設為 1%,向量大小的倍數設為 0.5 倍,收斂模式的 𝑑𝑓 比例設為3%,並收斂 3 次。
所得結果如表 8,左方二欄為表示實驗時的目標位置,右方四欄則分別包含 窮舉探測法和本研究方法的量測誤差和搜尋時間的數值,並在最後分別平均以取 得平均量測誤差和平均搜尋時間,以便進行比較窮舉探測法和本研究方法的結果。 在搜索範圍中分佈情況如圖 13,藍色範圍為本研究之搜索範圍,而紅色的星號 點位為隨機產生,並作為本研究模擬實驗之目標位置,其中四個紅點的位置都靠 整體搜尋範圍的左方,僅有一點位於右方。針對量測誤差和航行時間進行比較, 窮舉探測法的量測誤差範圍約在8 到 18 公尺之間,平均量測誤差約在 13 公尺, 而所消耗的時間範圍約在200 秒至 5000 秒之間,平均約為 1950 秒,搜尋時間的 標準差約為1964,當點位在圖 13 中越靠近左下方時,所需搜尋時間越短,反之 則越長。而本研究之方法量測誤差約在 0.09 公尺至 6 公尺之間,量測誤差平均 約在2 公尺,消耗的時間約為 1000 至 3000 秒,整體平均約為 1700 秒,搜尋時 間的標準差約為692,本研究的標準差相對較小,因此搜尋時間相較穩定。最後, 本研究之量測誤差相較窮舉探測法之量測誤差高10 公尺,時間約節省 250 秒。 在此所探測出之窮舉探測法的搜尋時間,因樣本數較少,搜尋時間受到隨機產生 的目標位置影響較大,若測試更多次且隨機產生目標位置,那產生的目標座標位 置平均所得應該會落在整體的中間,搜尋時間應會是將整個區域搜索完後的一半, 也就是3000 秒左右。 表 8 . 現行窮舉探測法與本研究方法結果比較表 目標緯度 目標經度 窮舉探測法 本研究方法 量測誤差 (m) 航行時間 (s) 量測誤差 (m) 航行時間 (s) 22.854543 120.18924 8.82 224 0.09 1422 22.859107 120.19181 18.00 729 5.97 1317 22.863038 120.19126 14.82 1366 0.75 1634 22.86131 120.19939 10.35 5199 2.61 2862 22.850078 120.19338 11.44 2205 0.45 1117 平均 12.69 1944.60 1.97 1670.40 標準差 3.70 1964.17 2.44 691.75
圖 12 . 實驗的目標物位置 總體而言,本研究之方法和窮舉探測法相較起來,可以發現到整體航行時所 需消耗的時間差距為250 秒,而兩者靠近目標物之距離差距為 10 公尺,因此可 以判斷本研究之方法優於現在的方法。而模擬實驗的結果本研究之方法平均可以 於量測誤差於2 公尺的範圍內,能相當靠近目標物的位置,若目標為排放汙染氣 體的煙囪時,二公尺應能足夠判斷出目標物的位置。
結論與未來研究方向
本研究提出一個適用於無人載具找尋在一疑似有目標的區域中,判斷目標是 否存在及目標的位置。透過無人載具所搭載之感測器全球定位系統取得無人載具 所在座標位置和探測儀器所探測出的偵測目標量測值數值作為航跡資料,動態找 尋目標物所在地理位置,並根據模擬實驗測試不同的航行狀況,分析以找出最適 合無人載具找尋目標物位置的各項參數。 本研究應用探測儀器偵測出之結果和依循三個階段在一疑似有目標的區域 中,判斷目標是否存在及目標的位置。首先,巡航模式將劃分後的區塊給予探測 區域較有可能存在目標物的區塊較高的機率,再依序從機率最高者中尋找整體最 可能為目標物所在地的區塊,相較過去的方法更加節省時間和效能。而追蹤探索 模式中,利用向量的方向和大小,由量測值低往高,在探索過程中更接近追蹤目 標,並能控制單次前進的距離不致於超出目標的範圍過多,並能夠將目標所在位 置限定在一區域範圍中。最後收斂模式利用每次搜尋範圍中最具可能有目標物所 在的部份,針對該部份做更細緻的搜尋,以劃分出目標實際位置,減少不必要的 探勘,亦能更加精準的鎖定目標物所在的位置。而模擬實驗的結果本研究方法所 探測出的結果相較現行的方法整體而言,能夠以更短的時間找到目標物,同時也 能更精準的找到目標物。 總結而言,因應無人載具成本低和相關技術開放,已被廣泛應用於各領域, 而無論是軍事或者商業上,應用無人載具的方式成為重要的議題。僅管現在商業 應用於追蹤探測案例較少,但運用無人載具搭載探測儀器,協助探測環境、物體 等用途,能夠減少人力、風險。同時亦能根據全球定位系統精準判斷無人載具的 位置,並能夠即時應用探測所得的紀錄分析結果,藉此判斷出目標物的位置,應 用在探測目標物上十分重要。依據前述故本研究提出的方法能夠應用於在一疑似 有目標的區域中,判斷目標是否存在及目標的位置,以探測儀器所得數值協助無人載具,並利用調整參數的方式,動態協助追蹤探測各類物體,而非以現行窮舉 探測方式搜尋,需在大面積中搜尋結果,避免多餘的消耗,並降低無人載具的負 荷,更快速達成目的。未來無人載具的應用能夠協助人們更加快速且動態協尋一 疑似有目標物的區域,找出目標物之所在地。 本研究之方法僅能搜尋符合下述三種特性的目標,首先是本研究追蹤之目標 物需為具有擴散性特徵的訊號源才得追尋,因本研究是藉由目標物所擴散出的訊 號才得以追蹤目標物的位置。第二則是本研究方法因是逐漸找尋目標物之所在位 置,僅能找尋在一區域中未正在移動的目標,倘若目標正在移動而且相對速度較 快,本研究所提出的方法將會無法成功的訂定出目標的所在地。最後本研究的方 法並未考慮多重目標的偵測,在一區域中僅能探測同一目標物的位置,而無法針 對多個目標進行追蹤,而且同時多個目標物若太相近的話,也可能導致所傳出的 訊號相互混雜,而難以判斷目標的位置。 由於本研究目前所模擬的目標物為一從中心擴散的信號源,而若當目標物並 非呈現從中心擴散的狀況時,所搜尋到的結果可能將不如預期。因此在實際搜尋 時,若要追尋其他模式的訊號源時,需要針對該類型的擴散源進行測試,調整參 數並測試是否能成功搜尋得到。另外也會因實際搭載的探測儀器而受到影響,因 探測儀器探測時,探測頻率並非每次均相同,因而亦會影響探測的結果。若探測 的目標物在擴散時會受到風向或障礙物影響,也可能影響探測的結果。本研究僅 以模擬法測試本研究方法的可行性,因而若能以無人載具搭載探測儀器實際飛行 以確認在實際航行中的狀況,將能更明確了解可能會遇到的問題。
![表 1 . 無人載具應用範圍 用途 範例 軍事 戰場監控、通訊中繼、定位和搜尋目標[3] 環境監測 氣象觀測[4][5]、水文觀測[6][7] 救災運輸 災情調查、物資運送 都市計畫 量測國土、交通監視、通訊網路 農業輔助 噴灑農藥、監控農作物[8] 商業應用 廣告拍攝、娛樂表演 (3) 商業市場趨勢 各大企業自 2011 年後開始陸續投入資金,發展無人機升空計畫,如 Amazon、 Facebook、Google 和 Disney,用於運輸包裹、提供通訊或者廣告。而在](https://thumb-ap.123doks.com/thumbv2/9libinfo/7426636.106555/11.892.144.749.129.452/噴灑農藥監控農作商業應用廣告拍攝娛樂表演商業市場趨勢企業而在.webp)