國 立 交 通 大 學
機 械 工 程 學 系
碩 士 論 文
修整型螺旋內齒輪組之特性分析
Characteristic Analysis of Modified Internal Helical Gear Pairs
研 究 生: 魏家誠
指 導 教 授: 陳仁浩
教授
修整型螺旋內齒輪組之特性分析
Characteristic Analysis of Modified Internal Helical Gear Pairs
研 究 生: 魏家誠 Student: Chia-Cheng Wei
陳仁浩 Dr. Ren-Haw Chen
指導教授:
蔡忠杓 Advisor: Dr. Chung-Biau Tasy
國 立 交 通 大 學
機 械 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master
In
Mechanical Engineering
June 2007
Hsinchu, Taiwan, Republic of China
修整型螺旋內齒輪組之特性分析
研究生:魏家誠 指導教授:陳仁浩 博士
共同指導教授:蔡忠杓 博士
國立交通大學 機械工程學系
摘要
齒輪為傳遞動力的重要機械元件,其中圓柱型螺旋齒輪由於具有高效 率傳遞動力的特性,因此被工業界廣泛地應用在各種傳動機構中。螺旋內 齒輪組與外齒輪相比之下由於具有更小之中心距的空間特性,因此內齒輪 組為減速機中常見之齒輪機構,而且螺旋齒輪在嚙合時其應力也較小且運 轉也較平順。然而由於螺旋內齒輪在實際製造及裝配上之誤差,使其失去 原本理想的共軛嚙合條件,造成接觸狀況不佳的情況,所以業界一般會對 齒輪齒面進行修整,以達到降低齒輪傳動誤差之目的。 本論文依據齒輪原理及創成機構之關係,在假設齒輪為剛體的前題 下,推導出螺旋內齒輪組之齒面數學模式,並開發電腦輔助分析程式來進 行該齒輪組之齒輪接觸模擬分析,探討齒輪組經由冠狀及轉位修整之螺旋 小齒輪與漸開線螺旋環齒輪,當其齒輪傳動軸具有旋轉軸向之裝配誤差的 情形時之嚙合狀態及運動誤差。Characteristic Analysis of Modified Internal Helical Gear Pairs
Dr. Ren-Haw Chen
Student: Chia-Cheng Wei
Advisor:
Dr. Chung-Biau Tasy
Department of Mechanical Engineering
National Chiao Tung University
Abstract
The gear is an important mechanical component for transmitting powers. Since the cylindrical helical gear has high efficiency to transmit power, therefore, it is widely used in reduction mechanisms by industry. The internal gear is a gear mechanism usually used for reduction gear box. Compared with the external gear, the center distance of the internal helical gear is smaller, the contact stress is lower and the gear meshing is also more smoother. However, due to the manufacture and assembly errors, the gear set may lose its conjugate meshing condition, which may cause the bad contact situation. Therefore, gear tooth modifications are widely used by the industry to reduce the transmission error of the gear pair.
In this thesis, according to the theory of gearing and gear generation mechanism, a mathematical model for internal helical gears with crowned and profile-shifted modification teeth has been developed under the assumption of gear wheel is a rigid body. Based on the gear meshing theory, mathematical model of tooth contact and bearing contact analysis are established.
誌謝
本論文能順利完成,首先要感謝指導教授 蔡忠杓博士平日細心與認 真地指導學生,不論在論文寫作或是待人處事上皆給予學生莫大的幫助及 啟示,令學生受益良多,故由衷地感謝老師對於學生的指導與付出。 同時感謝指導教授 陳仁浩博士與 劉家彰博士對學生論文的指正與 建議,並提供許多寶貴的意見,令本論文得以更為完備。 此外則是感謝實驗室的瑞堂學長、冠宇學長、立碁學長、威良學長、 偉旭學長、政豪學長、俊諭學長,以及宗賢同學、健育同學,當我在課業 及研究上有困惑的時候,能給予我實質的協助與意見,在日常生活上也陪 伴我渡過兩年來美好的時光,讓我可以調整心情面對課業上的壓力,我對 於能待在這實驗室以及認識大家而感到高興。 接著要感謝的人就是我的家人,因為有父母親的栽培與家人的支持, 我才能全心的在課業上衝刺,感激之情言謝不足全矣。 最後,感謝所有曾經給予我支持與幫助的人,因為你的援手讓我更能 站穩自己的步伐,才能達到今天的成就,謝謝大家。目錄
中文摘要 ... i 英文摘要 ...ii 誌謝 ...iii 目錄 ... iv 圖目錄 ... vi 表目錄 ...viii 符號表 ...xii 第一章 緒論 ... 1 1.1 前言 ... 1 1.2 文獻回顧 ... 2 1.3 研究內容 ... 3 第二章 基礎理論... 4 2.1 位置向量轉換 ... 4 2.2 嚙合方程式 ... 6 2.3 相對運動速度 ... 8 第三章 齒面數學模式推導... 12 3.1 前言 ... 12 3.2 齒條刀之齒面數學模式及嚙合方程式... 13 3.3 修整型螺旋齒輪之齒面數學模式... 23 3.4 小齒輪狀型齒刀之數學模式及嚙合方程式... 24 3.5 漸開線螺旋環齒輪之數學模式... 27 3.6 本章結論 ... 28第四章 修整型螺旋內齒輪組之齒面接觸分析... 32 4.1 前言 ... 32 4.2 螺旋內齒輪對之接觸分析數學模式... 32 4.3 齒輪對之運動誤差分析模式... 35 4.4 接觸分析例題與討論 ... 37 4.5 本章結論 ... 67 第五章 結論與未來展望... 69 5.1 結論 ... 69 5.2 未來展望 ... 71 參考文獻 ... 72
圖目錄
圖 2.1 位置向量與座標系之關係示意圖... 5 圖 2.2 空間中兩嚙合運動曲面之關係示意圖... 7 圖 2.3 平行軸共軛運動關係示意圖... 9 圖 2.4 空間物體之相對速度示意圖... 10 圖 3.1 齒條刀∑p之法向剖面圖... 14 圖 3.2(a) 齒條刀∑p之齒根導角法向剖面 ... 15 圖 3.2(b) 齒條刀∑p之齒頂導角法向剖面... 15 圖 3.3 假想齒條刀之刀面座標系關係示意圖... 18 圖 3.4 齒條刀與被創成齒輪之相對運動關係... 21 圖 3.5 小齒輪型齒刀與被創成環齒輪之相對運動關係... 26 圖 3.6(a) 電腦輔助繪圖之修整型螺旋小齒輪 ... 29 圖 3.6(b) 電腦輔助繪圖之漸開線螺旋環齒輪 ... 30 圖 3.6(c) 中心距為 20mm 之螺旋內齒輪組裝配示意圖... 31 圖 4.1 齒輪組具裝配誤差之座標系關係示意圖... 33 圖 4.2 不同冠狀修整半徑之螺旋小齒輪齒型... 39 圖 4.3 不同壓力角之螺旋小齒輪與壓力角20o螺旋內齒輪嚙合時之運動誤 差曲線 ... 46 圖 4.4 具水平與垂直軸向裝配誤差之漸開線螺旋內齒輪對之運動誤差曲 線 ... 49 圖 4.5 具水平軸向裝配誤差Δ =0.5o h γ 之冠狀修整螺旋內齒輪對之運動誤 差曲線 ... 56 圖 4.6 具垂直軸向裝配誤差Δ =0.5o v γ 之冠狀修整螺旋內齒輪對之運動誤圖 4.7 不同壓力角之冠狀修整螺旋內齒輪對在具有水平軸向裝配誤差 o 5 . 0 = Δγh 時之運動誤差曲線 ... 66 圖 4.8 不同壓力角之冠狀修整螺旋內齒輪對在具有垂直軸向裝配誤差 o 5 . 0 = Δγv 時之運動誤差曲線... 66
表目錄
表 3.1 修整型螺旋內齒輪對之主要設計參數... 28 表 4.1 漸開線螺旋內齒輪對的主要設計參數及其在理想裝配下的運動誤 差 ... 38 表 4.2 具冠狀修整 R=30mm 之螺旋內齒輪對的主要設計參數及其在理想 裝配下的運動誤差... 40 表 4.3 具冠狀修整 R=50mm 之螺旋內齒輪對的主要設計參數及其在理想 裝配下的運動誤差... 40 表 4.4 具冠狀修整 R=100mm 之螺旋內齒輪對的主要設計參數及其在理想 裝配下的運動誤差... 41 表 4.5 具冠狀修整 R=1000mm 之螺旋內齒輪對的主要設計參數及其在理 想裝配下的運動誤差... 41 表 4.6 具冠狀修整與正轉位修整之螺旋內齒輪對的主要設計參數及其在 理想裝配下的運動誤差... 43 表 4.7 具冠狀修整與負轉位修整之螺旋內齒輪對的主要設計參數及其在 理想裝配下的運動誤差... 43 表 4.8 不同壓力角之螺旋內齒輪對的主要設計參數及其在理想裝配下的 運動誤差(1) ... 44 表 4.9 不同壓力角之螺旋內齒輪對的主要設計參數及其在理想裝配下的 運動誤差(2) ... 44 表 4.10 不同壓力角之螺旋內齒輪對的主要設計參數及其在理想裝配下的 運動誤差(3) ... 45 表 4.11 不同壓力角之螺旋內齒輪對的主要設計參數及其在理想裝配下的表 4.12 具中心距之裝配誤差時,漸開線螺旋內齒輪對的主要設計參數及 其運動誤差(1) ... 47 表 4.13 具水平軸向之裝配誤差時,漸開線螺旋內齒輪對的主要設計參數 及其運動誤差(2) ... 47 表 4.14 具垂直軸向之裝配誤差時,漸開線螺旋內齒輪對的主要設計參數 及其運動誤差(3) ... 48 表 4.15 具垂直軸向之裝配誤差時,漸開線螺旋內齒輪對的主要設計參數 及其運動誤差(4) ... 48 表 4.16 具冠狀修整 R=30mm 之螺旋內齒輪對的主要設計參數及其在具有 中心距之裝配誤差下的運動誤差(1) ... 50 表 4.17 具冠狀修整 R=30mm 之螺旋內齒輪對的主要設計參數及其在具有 水平軸向之裝配誤差下的運動誤差(2) ... 50 表 4.18 具冠狀修整 R=30mm 之螺旋內齒輪對的主要設計參數及其在具有 垂直軸向之裝配誤差下的運動誤差(3) ... 51 表 4.19 具冠狀修整 R=30mm 之螺旋內齒輪對的主要設計參數及其在具有 水平軸向和垂直軸向之裝配誤差下的運動誤差(4) ... 51 表 4.20 具冠狀修整 R=50mm 之螺旋內齒輪對的主要設計參數及其在具有 中心距之裝配誤差下的運動誤差(1) ... 52 表 4.21 具冠狀修整 R=50mm 之螺旋內齒輪對的主要設計參數及其在具有 水平軸向之裝配誤差下的運動誤差(2) ... 52 表 4.22 具冠狀修整 R=50mm 之螺旋內齒輪對的主要設計參數及其在具有 垂直軸向之裝配誤差下的運動誤差(3) ... 53
有中心距之裝配誤差下的運動誤差(1) ... 54 表 4.25 具冠狀修整 R=1000mm 之螺旋內齒輪對的主要設計參數及其在具 有水平軸向之裝配誤差下的運動誤差(2) ... 54 表 4.26 具冠狀修整 R=1000mm 之螺旋內齒輪對的主要設計參數及其在具 有垂直軸向之裝配誤差下的運動誤差(3) ... 55 表 4.27 具冠狀修整 R=1000mm 之螺旋內齒輪對的主要設計參數及其在具 有水平和垂直軸向之裝配下的運動誤差(4) ... 55 表 4.28 冠狀及正轉位修整之螺旋內齒輪對的主要設計參數及其具有中心 距裝配誤差時之運動誤差(1) ... 57 表 4.29 冠狀及正轉位修整之螺旋內齒輪對的主要設計參數及其具有水平 軸向裝配誤差時之運動誤差(2) ... 58 表 4.30 冠狀及正轉位修整之螺旋內齒輪對的主要設計參數及其具有垂直 軸向裝配誤差時之運動誤差(3) ... 58 表 4.31 冠狀及正轉位修整之螺旋內齒輪對的主要設計參數及其具有水平 和垂直軸向裝配誤差時之運動誤差(4) ... 59 表 4.32 冠狀及負轉位修整之螺旋內齒輪對的主要設計參數及其具有中心 距裝配誤差時之運動誤差(1) ... 59 表 4.33 冠狀及負轉位修整之螺旋內齒輪對的主要設計參數及其具有水平 軸向裝配誤差時之運動誤差(2) ... 60 表 4.34 冠狀及負轉位修整之螺旋內齒輪對的主要設計參數及其具有垂直 軸向裝配誤差時之運動誤差(3) ... 60 表 4.35 冠狀及負轉位修整之螺旋內齒輪對的主要設計參數及其具有水平 和垂直軸向裝配誤差時之運動誤差(4) ... 61
表 4.37 壓力角14.5o之冠狀修整螺旋內齒輪對的主要設計參數及其具有水 平軸向裝配誤差時之運動誤差(2) ... 62 表 4.38 壓力角14.5o之冠狀修整螺旋內齒輪對的主要設計參數及其具有垂 直軸向裝配誤差時之運動誤差(3) ... 63 表 4.39 壓力角14.5o之冠狀修整螺旋內齒輪對的主要設計參數及其具有水 平和垂直軸向裝配誤差時運動誤差(4) ... 63 表 4.40 壓力角25o之冠狀修整螺旋內齒輪對的主要設計參數及其具有中 心距裝配誤差時之運動誤差(1) ... 64 表 4.41 壓力角25o之冠狀修整螺旋內齒輪對的主要設計參數及其具有水 平軸向裝配誤差時之運動誤差(2) ... 64 表 4.42 壓力角25o之冠狀修整螺旋內齒輪對的主要設計參數及其具有垂 直軸向裝配誤差時之運動誤差(3) ... 65 表 4.43 壓力角25o之冠狀修整螺旋內齒輪對的主要設計參數及其具有水 平及垂直軸向裝配誤差時之運動誤差(4) ... 65
符號表
b 齒條刀設計參數(mm) C 齒輪組理論中心距(mm) C′ 齒輪組實際嚙合中心距(mm) C Δ 中心距誤差(mm) E 冠狀修整之刀具轉位量(mm) 2 E 齒冠修整之刀具最大轉位量(mm) i f 齒頂與齒根導角設計參數(i =a,d)(mm) i h 齒條刀設計參數(i =a,d)(mm) I 共軛運動對的瞬心 l 齒條刀齒面設計參數(mm) ) ( s l 齒輪形齒刀設計參數(mm) ij L 法向量轉換矩陣由Sj座標系轉換至Si座標系 n m 齒條刀法向模數(mm/齒) ) ( s n m 齒輪形齒刀法向模數(mm/齒) M 齒條刀刀面之動點 0 M 齒條刀刀面之固定點 ij M 齊次座標轉換矩陣由Sj座標系轉換至Si座標系 c n 座標系Sc上齒條刀刀面之單位法線向量 (i) f n 齒面單位法向量表示在固定座標系Sf N 兩相切平面之共同法向量 c N 齒條刀刀面之法線向量表示於座標系Sc (s) s N 齒輪形齒刀之法線向量表示於座標系Ss i O 座標系Sj之原點 P 兩曲面之共同接觸點 i r 齒輪節圓半徑(i =1,2)(mm)) ( 1 s r 齒輪形齒刀之節圓半徑 B R 冠狀修整之圓弧曲率半徑(mm) i R 位置向量(i =1,2,c, f,r,s) (i) f R 齒面軌跡表示於固定座標系Sf 之位置向量(i =1,2) ) , , ( i i i i X Y Z S 座標系Si(i =1,2,a,c,d, f,h,r,s,v) i T 齒數(i =1,2) T 曲面之共同切平面 u 齒條刀齒面設計參數(mm) (ij) V 物體 i 相對於物體 j 之相對速度 (i) f V 物體 i 在座標系Sf 之速度 (ij) f V 物體 i 相對於物體 j 之相對速度表示於座標系S f W 齒寬(mm) p x 創成螺旋齒輪時之轉位係數 ) ( s p x 創成齒輪形齒刀時之轉位係數 n α 齒條刀之法向壓力角(度) β 螺旋角(度) γ 靠模板參數(度) max γ 靠模板參數之極限值(度) ) (s γ 齒輪形齒刀之設計參數(度) h γ Δ 水平軸向裝配誤差(mm) v γ Δ 垂直軸向裝配誤差(mm) i θ 齒頂與齒根導角之設計參數(i =a,d)(度) λ 導程角(度) a ρ 齒頂導角之半徑(mm) d ρ 齒根導角之半徑(mm) i ∑ 螺旋小齒輪與螺旋環齒輪之齒面(i =1,2) ∑ 齒條刀與小齒輪形齒刀之刀面( = )
s φ 齒輪形齒刀之旋轉角(度) i φ′ 齒輪嚙合時之旋轉角(i =1,2) (度) 2 φ′ Δ 齒輪組之運動誤差(弧度-秒;arc-second) ψ 旋轉軸之交錯角(度) i ω 齒輪之旋轉角速度(i =1,2)(弧度/秒;rpm)
第一章
緒論
1.1 前言
漸開線型螺旋內齒輪(Internal Helical Gear)是指齒筋為螺旋狀之圓筒 型內齒輪,主要與螺旋齒輪搭配使用在減速齒輪箱中,因為它具有較高的 齒輪比(Gear Ratio)及接觸比,齒輪嚙合時應力較小且運轉較平順,跟外齒 輪相比具有更小中心距的空間特性;而漸開線齒形還具有製造簡單且縱使 中心距有微幅變動,仍可維持共軛運動的優點,故為目前業界應用最廣泛 的齒輪齒形。 螺旋齒輪的滾製過程,在理論分析上亦可加以簡化為由齒條刀與齒胚 做相對運動加以模擬。在創成過程中,其每一瞬間齒條刀與被切製齒輪之 齒面間為線接觸,而螺旋內齒輪組中的環齒輪(Ring Gear)由於其特殊幾何 關係,並無法使用滾齒刀來切製環齒輪。目前一般齒輪製造商在產製環齒 輪時,最常採用的製造方式為使用小齒輪齒形之型齒刀或拉刀,利用刨製 法(Shaping)來製造環齒輪。 近年來由於齒輪之製造技術漸趨成熟,且在許多應用場合中,對齒輪 傳動之精密度、噪音和振動的要求愈來愈嚴格,所以對於齒輪製造或裝配 誤差所造成的運動不平順、噪音或振動等,都是工程師極欲解決的問題。 由於漸開線型螺旋內齒輪對在理想的嚙合狀況下,其齒面接觸型態呈線接 觸,因此只要有旋轉軸向之裝配偏差產生時,其接觸型態就會由線接觸變 成點接觸,且接觸位置會落於齒面的前後齒緣上,亦即所謂的齒緣接觸 (Edge Contact),如此會使得齒輪運轉時之運動誤差增大而產生了較大的振 動及噪音,同時也會造成齒輪之齒緣附近應力集中,將可能會導致齒面之 崩壞而影響齒輪之使用壽命。所以齒輪在實際使用時經常對其齒面進行修
1.2 文獻回顧 漸開線螺旋齒輪是一種廣為工業界所使用之齒輪,已有相當久的歷 史,故不論在工業或學術上也有相當多的研究資料與技術經驗。一般漸開 線 螺 旋 齒 輪 之 齒 面 修 整 主 要 有 冠 狀 (Crowning) 及 齒 形 修 整 (Profile Modification)。冠狀修整乃是沿著漸開線螺旋齒輪之齒筋方向,亦即導程 (Lead)方向,利用刀具將漸開線螺旋齒輪齒筋方向兩端之齒肉進行微量之 刮除,使得齒輪在齒筋方向兩端之齒厚(Tooth Thickness)略微縮小。至於 齒形修整則是針對漸開線螺旋齒輪之齒形(Profile)作改變,可調整齒輪壓 力角(Pressure Angle)之角度及轉位量(Amount of Shift),或對齒輪之齒冠 (Addendum)或齒根(Dedendum)進行特殊之修整加工,使得齒輪之齒形產生 變化。冠狀及齒形修整亦是工業界所普遍運用的技術,而這些作法在各齒 輪規範都有相關的資料可供參考,但對於冠狀及齒形修整之漸開線螺旋內 齒輪組的接觸狀況及運動誤差之探討與研究尚不多見。Litvin[1-3]探討有 關齒輪運動誤差(Kinematical Error)之理論分析研究,對於齒輪組之運動誤 差分析提供了理論與分析基礎。蔡等人[4-6]於 1986 年推導漸開線螺旋齒 輪之數學模式,以及提出漸開線螺旋齒輪之電腦模擬、接觸分析與應力分 析。白[7]於 1989 年探討漸開線形內齒輪之特性研究與分析,同年,陳[8] 提出具冠狀小齒輪之內齒輪組的特性研究與分析。王[9]於齒輪原理概要中 提及冠狀與轉位之理論與相關之齒輪方程式。王[10]於 1997 年研究修整型 螺旋齒輪之接觸分析,張[11]於同年進行修整型螺旋齒輪之傳動誤差之測 試與分析。蘇[12]於 2006 年探討具冠狀與齒形修整之螺旋齒輪的齒印分 析。蔡等人[13-15]提出漸開線內齒輪組之理論分析以及正齒輪之冠狀修整 齒型。
1.3 研究內容 本研究利用 Litvin[1-3]所提出之齒輪原理及蔡等人[4-6]所發展之齒輪 數學模式推導流程,來建立具冠狀及轉位修整之螺旋小齒輪及漸開線環齒 輪的數學模式。接著探討當齒輪組在具有製造及裝配誤差時,經修整之漸 開線螺旋齒輪的接觸特性,同時藉由適當的選用齒輪之設計參數,亦可使 得齒輪系統的運動誤差控制在可接受的範圍內。 茲將本論文各章之研究大綱概述如下: 第一章為緒論。主要為螺旋內齒輪組之概述及相關文獻之回顧,並介紹各 章之研究內容。 第二章為基礎理論。介紹創成共軛運動對的基本理論,藉由此章節之理論 探討與理解,可進一步做為後面章節在建立刀具及被創成齒輪之齒面數學 模式以及齒輪創成原理之基礎。 第三章為齒面數學模式推導。本章利用第二章創成共軛運動對之基礎理 論,建立具冠狀與轉位修整之螺旋齒輪及漸開線環齒輪的齒面數學模式。 第四章為修整型螺旋內齒輪組之接觸分析,主要是利用第三章所推導之齒 輪數學模式,配合本研究自行開發之電腦輔助齒輪接觸分析(Tooth Contact Analysis,TCA)程式,模擬齒輪傳動的嚙合狀態及運動誤差。探討不同齒輪 設計參數對齒輪運動誤差之影響。 第五章則為本論文之結論與未來展望。
第二章
基礎理論
2.1 位置向量轉換 假設空間中有兩個座標系Sf(Xf,Yf,Zf)與Si(Xi,Yi,Zi),兩座標系間之關 係如圖 2.1 所示。若Sf 與Si兩座標系中有一共同點 P,其位置向量表示於Si 座標系為Ri,若要把 P 點之位置向量Ri由Si座標系轉換至Sf 座標系來表 示其位置向量Rf ,則可利用齊次座標轉換矩陣(Homogeneous Coordinate Transformation Matrix)方程式來表示此兩座標系間之位置向量轉換: i fi f M R R = (2.1) 其中 ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = 0 Mfi 0 0 0 ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( i i i O f i f i f i f O f i f i f i f O f i f i f i f Z Z Z Y Z X Z Y Z Y Y Y X Y X Z X Y X X X (2.2) (2.2)式中的cos(Xf,Xi)表示Xf 軸與Xi軸間夾角之餘弦值,其餘依此類推; 而 Oi f X 、 Oi f Y 及 Oi f Z 為Si座標系之原點Oi表示於Sf 座標系之三個座標軸的分 量,Mfi則為齊次座標轉換矩陣,可將位置向量Ri由Si座標系轉換至Sf 座 標系。 至於一般速度及法向量等之座標系間的轉換,因為與座標系之原點無 關,所以此類向量的座標系間轉換矩陣Lfi為(2.2)式之子矩陣,可由Mfi矩 陣刪去最後一行及最後一列而得,亦即如下列之表示式: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( i f i f i f i f i f i f i f i f i f Z Z Y Z X Z Z Y Y Y X Y Z X Y X X X fi L (2.3)2.2 嚙合方程式
當兩曲面嚙合保持連續接觸狀態時,可藉由嚙合方程式(Equation of Meshing)來表示兩齒面參數與運動參數之間的關係。如圖 2.2 所示,空間
中有兩個互相嚙合運動的曲面∑1和∑2,P點則為這兩嚙合運動曲面相切
(in Tangency)時之共切點(Common Tangent Point),此點同時也是這兩個嚙
合運動曲面的瞬時接觸點。兩個嚙合曲面在其共切點P點具有共同之曲面 法向量N,而V(12)為兩曲面 1 ∑ 和∑2在P點之相對速度。 由於兩曲面在嚙合運動時,其接觸過程中為連續之嚙合,不會產生一 個曲面嵌入另一個曲面或兩嚙合曲面分離而產生不接觸,因此,這兩個共 軛運動曲面在其共同法向量之方向上將不存在相對速度V(12),亦即兩曲面 之共同法向量的方向上其相對速度V(12)為零。然而在兩嚙合曲面之間實際 上必有相對速度存在,其相對速度V(12)必落於兩嚙合曲面之共同切平面
(Common Tangent Plant)T上,因此,兩相切曲面之瞬時共同法向量N必與
其共切面T互相垂直。從上述兩曲面∑1和∑2嚙合運動之現象可得到如下結 論:兩嚙合運動曲面其相對速度V(12)和共同法向量N,在其共同接觸點P處 必互相垂直,亦即兩者之內積(Dot Product)為零,所以下式亦必成立: 0 = ⋅V(12) N (2.4) 方程式(2.4)即齒輪原理中探討共軛運動對之嚙合運動條件的嚙合方 程式(Equation of Meshing),此嚙合方程式對於二維(Two-Dimensional)及三 維(Three-Dimensional)的共軛運動對均可適用。
在方程式(2.4)中,相對速度V(12)的計算較為複雜,當創成刀具和被創成齒 輪間的運動屬於平行軸之共軛運動關係時,可以簡化成二維的情況來討 論,如圖 2.3 所示,V(12)可以表示為: IP ω IP V(12) = − × = (12)× ) (ω1 ω2 (2.5) 其 中 I 為 滾 齒 刀 與 齒 輪 共 軛 運 動 時 的 瞬 心 (Instantaneous Center of Rotation)。由方程式(2.5)得知相對速度V(12)與IP垂直,因此可以確認其共 同法向量N一定通過I點,所以可以推導出下式: ) ( ) ( ) ( ) ( ) ( ) ( θ θ θ φ θ φ y x N y Y N x X − = − (2.6) 其中X(φ)及Y(φ)為瞬心I點之座標,x(θ)及y(θ)是P點的座標,而 (θ) x N 及 (θ) y N 則為其共同法向量在 X 軸及 Y 軸之分量。利用(2.6)式可以更容易地推導 出二維共軛運動對之嚙合方程式。 2.3 相對運動速度 如圖 2.4 所示,假設空間中有兩個物體,物體 1 與物體 2 分別固聯於 座標系S1(X1,Y1,Z1)與座標系S2(X2,Y2,Z2)。Z1軸與Z2軸分別為物體 1 與物體 2 之旋轉軸,其旋轉之角速度分別為ω1與ω2,ψ 為兩旋轉軸之交錯角,C 為其最短距離,P 點為物體 1 與物體 2 之瞬時接觸點。因此,在物體 1 上 之瞬時接觸點 P 的速度V(1)可由下式求得: 1 1 (1) ω R V = × (2.7) 其中R1為物體 1 旋轉軸之座標原點指向瞬時接觸點 P 之位置向量。 而在物體 2 上之瞬時接觸點 P 的速度V(2)則可由下式求得:
圖 2.4 空間物體之相對速度示意圖
ψ
1ω
2ω
2 2 (2) ω R V = × (2.8) 其中R2乃是由物體 2 旋轉軸之座標原點指向瞬時接觸點 P 之位置向 量。因此,物體 1 與物體 2 之相對速度V(12)可求得如下: (2) (1) (12) V V V = − (2.9) 由於 1 1 2 2 O O R R = + (2.10) 經整理簡化後得下式: 2 2 1 1 2 1 (12) ω ω R O O ω V =( − )× − × (2.11) 或V(12) =ω(12)×R1 −R×ω2 (2.12) 其中R為自物體 1 之座標系原點O1指向物體 2 之旋轉軸上任一動點之 位置向量。相對速度方程式(2.11)或(2.12)主要適用於三維座標系,創成刀 具和被創成齒輪的兩旋轉軸是屬於交錯軸旋轉之運動,亦即兩軸為不相交 亦不平行之共軛運動關係。
第三章
齒面數學模式推導
3.1 前言
本章將依據 Litvin[1-3]發展之齒輪創成原理來推導出具有冠狀及轉位 修整之螺旋小齒輪和漸開線形螺旋環齒輪的齒面數學模式。有了齒輪之齒 面數學模式後便可利用電腦輔助繪圖技術繪出其齒輪輪廓,並在電腦上進 行齒輪之齒面接觸分析(Tooth Contact Analysis)與模擬。在推導齒輪之齒面 數學模式過程中,有兩項假設: (1) 溫度效應與動態負載的影響不予考慮。 (2) 在齒形創成的過程中,僅考慮齒輪為剛體運動,彈性與塑性變形不予 考慮。 本論文在探討螺旋齒輪齒面創成時,乃是將滾齒刀(Hob Cutter)之滾齒 動作視為齒條刀(Rack Cutter)作平移運動及工件做旋轉運動所構成之相對 運動,所以在建立齒輪的齒面數學模式之前,須先建立齒條刀的刀面外形 數學模式,並利用齊次座標轉換矩陣方程式,根據齒條刀創成齒輪以及冠 狀修整之刀具刀面的路徑進行座標轉換,以求得刀具刀面之軌跡。其次依 微分幾何的原理找出接觸點或接觸線的位置及其在接觸面上的共同法向 量,同時加入轉位之齒形修整,再配合齒輪運動之相互關係和嚙合方程式 (Equation of Meshing),即可推導出被創成之螺旋齒輪的齒面數學模式。再 利用被創成之螺旋齒輪齒面數學模式當作假想齒刀,依齒輪創成原理則可 推導出螺旋環齒輪之齒面數學模式。
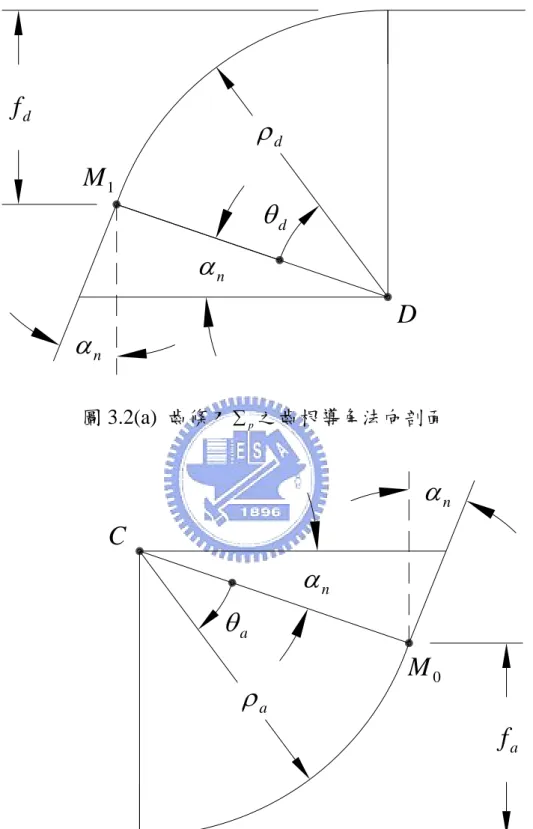
3.2 齒條刀之齒面數學模式及嚙合方程式 一個漸開線形齒形的螺旋齒輪,可由一把具有直邊的齒條刀所創成, 而本論文所探討之修整型螺旋內齒輪組,係以一假想齒條刀來模擬滾齒刀 滾製齒輪,創成出具有冠狀及轉位修整之螺旋齒輪。如圖 3.1 所示之齒條 刀∑p,其兩側呈左右對稱,而齒條刀之主體為其直邊刀刃,直邊刀刃的 兩端分別接續齒條刀之齒根導角(Dedendum Fillet)與齒頂導角(Addendum Fillet),亦即齒條刀之下圓弧導角與上圓弧導角。在齒條刀切製齒輪的過 程中,齒條刀之直邊將創成齒輪之漸開線齒形部分,齒條刀之齒根導角將 會創成出齒輪之齒頂導角,而齒條刀之齒頂導角將會創成出齒輪之齒根導 角。 圖 3.1 表示齒條刀∑p之法向剖面圖,圖中之設計參數l表示由固定點 0 M 沿著齒刀面到其直邊之任一動點M 之距離,即l= M0M,其範圍定義為 1 0
0≤ l≤ M M ,而αn係齒刀之法向壓力角(Normal Pressure Angle)。圖 3.2
則為圖 3.1 中齒條刀∑p之齒頂與齒根導角之放大圖,其中ρa係齒條刀之齒 頂導角的半徑,ρd則為齒條刀之齒根導角之半徑,θa與θd分別是描述齒條 刀之齒頂導角與齒根導角的參數,而αn ≤θa ≤π/2和αn ≤θd ≤π/2則為此兩 參數之定義範圍。 由圖 3.1 及圖 3.2 所示,可得知齒條刀法向剖面之參數方程式表示在 ) , , ( r r r r X Y Z S 座標系之通式為: ⎥ ⎥ ⎤ ⎢ ⎢ ⎡ = r r y x r R (3.1)
圖 3.1 齒條刀∑p之法向剖面圖
C
0M
M
1M
nα
D
n ah
b
2
tan
α
2
+
b
2
rO
rX
df
dh
ah
af
rY
M
M
0=
l
圖 3.2(a) 齒條刀∑p之齒根導角法向剖面 d
f
1M
nα
nα
dθ
dρ
D
C
aθ
aρ
nα
nα
0M
af
齒條刀∑p之左半邊的直邊齒形方程式表示在Sr座標系為 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = 0 tan sin cos b h h n a n a n α α α l l lsr R (3.2) 齒條刀∑p之左半邊齒根導角齒形方程式表示在Sr座標系為 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − + + − + − = 0 tan cos cos sin sin b h h n d n d d d d n d d d α α ρ θ ρ α ρ θ ρ ldr R (3.3) 齒條刀∑p之左半邊齒頂導角齒形方程式表示在Sr座標系則為 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − + − = 0 tan cos cos sin sin b h h n a n a a a a n a a a α α ρ θ ρ α ρ θ ρ lar R (3.4) 齒條刀∑p之右半邊的直邊齒形方程式表示在Sr座標系為 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + + − − = 0 tan sin cos b h h n a n a n α α α l l rsr R (3.5) 齒條刀∑p之右半邊齒根導角齒形方程式表示在Sr座標系為 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − − + − = 0 tan cos cos sin sin b h h n d n d d d d n d d d α α ρ θ ρ α ρ θ ρ rdr R (3.6) 齒條刀∑p之右半邊齒頂導角齒形方程式表示在Sr座標系則為 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + + + − − + − = 0 tan cos cos sin sin b h h n a n a a a a n a a a α α ρ θ ρ α ρ θ ρ rar R (3.7)
其中齒條刀具相關之齒形設計參數(如圖 3.1 和圖 3.2)說明如下: n α 表法向壓力角; d h 表齒根高,於本研究中設定hd =1.0mn; a h 表齒冠高,於本研究中設定ha =1.0mn;
其中mn表法向模數(Normal Pressure Angle);
b 2 表齒條刀法向節距之一半,亦等同於齒厚,即2b=Pn /2; 其中Pn為周節(Circular Pitch); d f 表齒條刀齒根導角起始點位置參數,於本研究中設定 fd =0.1mn; a f 表齒條刀齒頂導角起始點位置參數,於本研究中設定 fa =0.15mn; 在圖 3.3 中,座標系Sc(Xc,Yc,Zc)為齒條刀∑p之固定座標系,座標系 ) , , ( a a a a X Y Z S 則為一輔助的移動座標系,Za軸與Yc軸之夾角即為被創成齒輪 之螺旋導程角λ,而Za軸與Zc軸之夾角則為被創成齒輪之螺旋角β。欲切 製具螺旋導程角λ且又具有轉位修整之齒條刀外形時,可將齒條刀∑p之法 向剖面放置於Xa-Ya平面,再依圖 3.3 所示之路徑運動即可,其中u為刀具 面的另一個設計參數,表示由固定座標系的原點Oc到移動座標系的原點Oa 之距離,亦即u = OcOa ,也代表齒條刀∑p沿著OcOa路徑移動以切製齒輪。 若要切製具有冠狀修整之漸開線螺旋齒輪時,則需令齒條刀∑p之法向剖 面固聯於座標系Sr,且以OB為原點RB為半徑,使其與座標系Sa一同沿著 a cO O 的方向移動,座標系Sr與座標系Sa之距離是一個變動的參數E,表示 齒條刀於某一位置之轉位量,亦即滾齒機在滾切齒輪時齒刀於某一位置之 轉位量。γ 則為靠模板曲線參數之一,用以決定刀具於靠模板曲線的位置, 當γ =γmax時,刀具的轉位量E達到其最大值Emax,而當 o 0 = γ 時,刀具的轉
圖 3.3 假想齒條刀之刀面座標系關係示意圖 2
E
E
cO
cX
X ,
aX
r aO
u cZ
β
λ
rO
maxγ
γ
BR
BO
aY
rY
aZ
rZ
cY
W
W
5
.
0
根據上述之關係,可求得以下之關係式: ) sin (sinγmax − γ =RB u (3.8) ) cos 1 ( − γ = RB E (3.9) ) cos 1 ( max max = RB − γ E (3.10) 其中γmax的範圍為: λ γ λ sin 2 sin sin 2 sin 1 max 1 B B R W R W − − ≤ ≤ − ,W表示齒寬。 依圖 3.3 所示之齒條刀∑p與各座標系間的關係,即可利用齊次座標轉 換矩陣方程式,將齒條刀∑p之齒刀面數學模式表示於座標系Sc如下: r ar ca c M M R R = (3.11) 其中 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − = 1 0 0 0 sin sin cos 0 cos cos sin 0 0 0 0 1 λ λ λ λ λ λ u u ca M (3.12) ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − = 1 0 0 0 0 1 0 0 0 0 1 0 0 0 1 E ar M (3.13) 上式中Mar及Mca即為齊次座標轉換矩陣,分別表示將位置向量從座標系 r S 轉換至座標系Sa,以及從座標系Sa轉換至座標系Sc。利用(3.11)式即可 將齒條刀之齒刀面數學模式轉換至座標系Sc,亦即可求得創成具冠狀修整 或轉位之螺旋齒條刀的齒刀面方程式如下: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − + − − + − − = λ γ γ λ λ γ γ λ γ sin ) sin (sin cos cos ) sin (sin sin ) cos 1 ( max max B r B r B r R y R y R x c R (3.14)
因齒條刀與被創成之齒輪的齒面在創成過程中,其每一瞬間均有共同 的接觸線,且兩者在此瞬間接觸線的法向量相同。依微分幾何原理,齒條 刀面之法向量表示在Sc
(
Xc,Yc,Zc)
座標系可由下式求得: γ ∂ ∂ × ∂ ∂ = c c c R R N l (3.15)其單位法線向量(Unit Normal Vector)則可由下式求得: c c c N N n = (3.16) 因此,齒條刀∑p之左邊直邊刀面的單位法線向量可求得如下: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − + − = = λ γ α λ γ α λ γ α λ γ α γ α sin cos cos cos sin sin cos sin sin sin cos cos cos sin n n n n n A lsc lsc lsc N N n (3.17) 其中 n n A α α γ 2 2 2 sin cos cos 1 + = (3.18) 同理,齒條刀∑p之右邊直邊刀面的單位法線向量亦可求得如下: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = = λ γ α λ γ α λ γ α λ γ α γ α sin cos cos cos sin sin cos sin sin sin cos cos cos sin n n n n n A rsc rsc rsc N N n (3.19) 根據第二章所述之基本理論,嚙合方程式(2.4)係表示齒輪齒面參數與 運動參數之間的關係,而兩曲面之嚙合方程式為: 0 = ⋅V(12) N (3.20) 茲再考慮如圖 3.4 所示之齒條刀∑p與被創成齒輪∑1之創成關係,若在 齒 輪 之 切 製 過 程 中 未 考 慮 轉 位 切 削 時 , 則 齒 條 刀∑p 所 在 的 座 標 系
(
c c c)
c X Y Z S , , 會與參考座標系Sd(
Xd,Yd,Zd)
重合。在切製過程中,齒條刀∑p在 齒輪工件∑1之瞬軸面(即Yd-Zd平面)上方由右向左平移,而齒輪工作則依圖 3.4 齒條刀與被創成齒輪之相對運動關係 n p
m
x
d cX
X ,
fX
1 1φ
r
cO
dO
cZ
dZ
I
cY
dY
fY
I
1X
Y
1 1φ
1r
1,O
O
f 1ω
轉位係數xp來進行轉位之齒形修整,則齒條刀座標系Sc會相對於參考座標 系Sd沿著Xd軸向平移一轉位量xpmn,而齒條刀∑p的速度表示在固定座標 系Sf
(
Xf,Yf,Zf)
為: f (p) f j V =−ω1r1 (3.21) 被切製之齒輪∑1的速度表示在固定座標系Sf 則為: ) ( 1 c 1 (1) f ω R V = × OOc + (3.22) 其中O1Oc =(r1+xpmn)if −r1φ1jf (3.23) 而齒條刀與被切製之齒輪的相對速度 (1) f (p) f (p1) f V V V = − 。 (3.24) 若將(3.21)至(3.23)式代入(3.24)式後,即可得到齒條刀∑p與齒輪∑1在切製 過程中之相對速度如下: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + + − = 0 ) ( ) ( 1 1 1 1 n p c c m x x r y ω φ ω (p1) f V (3.25) 根據前述嚙合方程式之條件: 0 = ⋅ (p1) f (p) f V N (3.26) 因座標系Sf 與座標系Sc間並無相對之旋轉,故nf =nc。將求得之法線向量 與相對速度(3.25)代入(3.26)式,即可求得齒條刀∑p與齒輪∑1之嚙合方程 式如下: 0 ) ( ) ( ) , , (lp γp φ1 =nfx −yc+r1φ1 +nfy xc +xpmn = 1 F (3.27) 經整理簡化後亦可表示成下列之關係式: ) ( 1 1 1 c p n fx fy c x x m r n n r y + − = φ (3.28)3.3 修整型螺旋齒輪之齒面數學模式 齒條刀與被創成齒輪之座標系間的關係如圖 3.4 所示,茲利用齊次座 標 轉 換 矩 陣 將 齒 條 刀 ∑p 之 位 置 向 量 自 Sc
(
Xc,Yc,Zc)
座 標 系 轉 換 至(
1 1 1)
1 X ,Y,Z S 座標系,即可求得齒條刀∑p表示在S1座標系之軌跡方程式如 下: c fc 1f 1 M M R R = (3.29) 其中 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − = 1 0 0 0 0 1 0 0 0 0 cos sin 0 0 sin cos 1 1 1 1 φ φ φ φ 1f M (3.30) ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + = 1 0 0 0 0 1 0 0 0 1 0 0 0 1 1 1 1 φ r r m xp n fc M (3.31) 將(3.14)式代入(3.29)至(3.31)式可得齒條刀∑p表示於齒輪座標系S1之軌跡 方程式為: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − + + + + + + − = c n p c c n p c c z r m x y x r m x y x ) cos (sin sin cos sin ) sin (cos cos sin cos 1 1 1 1 1 1 1 1 1 1 1 1 1 1 φ φ φ φ φ φ φ φ φ φ φ φ 1 R (3.32) 將齒條刀之軌跡方程式與齒條刀和齒輪工件兩者之嚙合方程式(即(3.27) 或(3.28)式)聯立,即為齒輪∑1之齒面數學模式。 同理,齒輪之齒頂導角及齒根導角的部分亦可參照相同之方式,分別 求其軌跡方程式與嚙合方程式,再將其聯立即可得齒條刀上下導角所創成3.4 小齒輪狀型齒刀之數學模式及嚙合方程式 由於內齒輪組中環齒輪之特殊幾何關係,要使用滾齒刀切製環齒輪是 不可行的,在一般的齒輪製造工廠最常使用的環齒輪製造方式為使用小齒 輪齒形之型齒刀或拉刀,利用刨製法(Shaping)來製造環齒輪。而小齒輪齒 形之型齒刀數學模式與 3.3 節所推導之螺旋齒輪齒面數學模式相同,為了 區別起見,特將具有小齒輪齒形的型齒刀之數學模式改寫如下: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − + + + + + + − = ) ( ) ( 1 ) ( 1 ) ( 1 ) ( 1 ) ( 1 ) ( ) ( ) ( 1 ) ( ) ( 1 ) ( ) ( 1 ) ( 1 ) ( 1 ) ( 1 ) ( 1 ) ( ) ( ) ( 1 ) ( ) ( 1 ) ( ) cos (sin sin cos sin ) sin (cos cos sin cos s c s s s s s s n s p s s c s s c s s s s s s n s p s s c s s c z r m x y x r m x y x φ φ φ φ φ φ φ φ φ φ φ φ s R (3.33) 本論文之環齒輪為標準漸開線形螺旋環齒輪,所以上述之小齒輪型齒刀需 假設無冠狀及轉位修整,亦即冠狀修整之圓弧曲率半徑趨近於極大,且轉 位係數為零,即x(ps) =0。 小齒輪型齒刀與被創成之螺旋環齒輪齒面在創成過程中小齒輪型齒 刀之刀面的單位法向量是與齒條刀與被創成之螺旋齒輪齒面之單位法向 量相同,茲將此單位法向量由齒條刀座標系Sc
(
Xc,Yc,Zc)
轉換至齒輪座標系(
1 1 1)
1 X ,Y,Z S ,並改寫如下: (s) c (s) fc (s) 1f s L L n n = (3.34) 其中 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − = 1 0 0 0 cos sin 0 sin cos ) ( 1 ) ( 1 ) ( 1 ) ( 1 s s s s φ φ φ φ (s) 1f L (3.35)⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = 1 0 0 0 1 0 0 0 1 (s) fc L (3.36) 因此,左齒面之單位法向量可表示於Sc座標系如下: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − + − = ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( sin cos cos cos sin sin cos sin sin sin cos cos cos sin s s s n s s s n s s s n s s s n s s n (s) A λ γ α λ γ α λ γ α λ γ α γ α (s) lsc n (3.37) 其中 ) ( 2 ) ( 2 ) ( 2 ) ( sin cos cos 1 s n s n s s A α α γ + = (3.38) 同理,右齒面之單位法向量亦可表示於Sc座標系如下: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( sin cos cos cos sin sin cos sin sin sin cos cos cos sin s s s n s s s n s s s n s s s n s s n (s) A λ γ α λ γ α λ γ α λ γ α γ α (s) rsc n (3.39) 茲考慮如圖 3.5 所示之小齒輪型齒刀∑s與被創成齒輪∑2之創成關 係 , 可 得 小 齒 輪 型 齒 刀∑s與 被 創 成 之 環 齒 輪 ∑2 的 相 對 速 度 表 示 在
(
s s s)
s X Y Z S , , 座標系為: ) ( ) ( 2 (s) s s (s2) s (s2) s ω R ω V = × − OsO × (3.40) 經展開簡化後可得: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − − − − = 0 cos ) ( sin ) ( ) 2 ( ) ( ) 2 ( ) 2 ( ) ( ) 2 ( s s s s s s C x C y φ ω ω ω φ ω ω ω (s2) s V (3.41) 其中C = OO圖 3.5 小齒輪型齒刀與被創成環齒輪之相對運動關係 s
X
sY
hY
hX
I
2X
2Y
sO
sφ
2φ
hO
O
2,
sω
2ω
小齒輪型齒刀∑s與被創成之齒輪∑2的嚙合方程式為: 0 = ⋅ (s2) s (s) s V N (3.42) 若將(3.37)及(3.39)式所求得之左、右齒面單位法線向量與相對速度(3.41) 式代入(3.42)式,即可求得小齒輪型齒刀∑s與被創成環齒輪∑2之嚙合方程 式。 3.5 漸開線螺旋環齒輪之數學模式 小齒輪型齒刀與被創成環齒輪之座標系間的關係如圖 3.5 所示,茲利 用齊次座標轉換矩陣將小齒輪型齒刀∑s之位置向量自Ss
(
Xs,Ys,Zs)
座標系 轉換至S2(
X2,Y2,Z2)
座標系,即可求得小齒輪型齒刀∑s表示在S2座標系之軌 跡方程式如下: s 2s 2 M R R = (3.43) 其中 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − − = 1 0 0 0 0 1 0 0 sin 0 ) cos( ) sin( cos 0 ) sin( ) cos( 2 2 2 2 2 2 φ φ φ φ φ φ φ φ φ φ C C s s s s 2s M (3.44) 將(3.33)式代入(3.43)及(3.44)式即可求得小齒輪型齒刀∑s表示於齒輪座標 系S2之軌跡方程式為: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − + − − + − + − = s s s s s s s s s z C y x C y x 2 2 2 2 2 2 sin ) cos( ) sin( cos ) sin( ) cos( φ φ φ φ φ φ φ φ φ φ 2 R (3.45) 若將上式之小齒輪型齒刀之軌跡方程式與兩者之嚙合方程式(3.42)式聯 立,即可得環齒輪∑2之齒面數學模式。 同理,小齒輪型齒刀之齒頂導角及齒根導角的部分亦參照相同之方3.6 本章結論 本章係依據齒輪創成原理,推導出具冠狀與轉位修整之漸開線螺旋齒 輪及標準漸開線螺旋環齒輪之齒面數學模式,此數學模式包含了刀具及被 創成齒輪的齒面數學模式。依據所推導出之修整型螺旋小齒輪及漸開線螺 旋環齒輪齒面數學模式,可利用電腦輔助程式以運算及繪出齒輪之三維齒 形,茲以表 3.1 所列設計參數之齒輪為例加以驗證。 表 3.1 修整型螺旋內齒輪對之主要設計參數 修整型螺旋小齒輪 漸開線螺旋環齒輪 齒數(齒) 60 120 法向模數(mm/齒) 2 2 壓力角(度) 20o 20o 導程角(度) 75o(右旋) 75o(左旋) 齒寬(mm) 20 20 轉位係數 −0.1 無 隆齒修整半徑(mm) 30 無 依本章所建立之齒面數學模式及電腦輔助繪圖,即可繪出螺旋內齒輪組之 外形,如圖 3.6 所示。本章所推導之內齒輪組數學模式亦有助於漸開線內 齒輪組後續之分析及模擬工作。
圖 3.6(a) 修整型螺旋小齒輪之電腦輔助繪圖
0 50 (mm)
Y
圖 3.6(b) 漸開線螺旋環齒輪之電腦輔助繪圖 0 50 (mm)
Y
Z
X
圖 3.6(c) 中心距為 60mm 之螺旋內齒輪組裝配示意圖
第四章
修整型螺旋內齒輪組之齒面接觸分析
4.1 前言
內齒輪組為工業界中常用的傳動機構,而齒輪傳動性能會因為齒輪本 身的製造精度,或是齒輪系統的裝配誤差,如中心距誤差和旋轉軸向之裝 配誤差,因而造成齒輪運動時的不平順,以致產生振動與噪音。本論文依 據蔡等人[4-6]所建立之螺旋齒輪的齒面接觸分析(Tooth Contact Analysis) 方法,將本論文第三章各節所推導得到的螺旋內齒輪組齒面數學模式,配 合本章之齒輪組之裝配狀態與齒面接觸條件,便可模擬齒輪對之嚙合運 動,並探討當齒輪對具有中心距、水平軸向與垂直軸向誤差時之內齒輪組 運動誤差。 4.2 螺旋內齒輪對之接觸分析數學模式 在本節中,將建立具有組裝誤差之齒輪對的接觸分析模式,首先必須 將各齒輪之齒面數學模式轉換至同一座標系後再加以分析。圖 4.1 所示為 螺旋小齒輪Σ1與螺旋內齒輪Σ2之裝配關係示意圖,座標系S1(X1,Y1,Z1)與 ) , , ( 2 2 2 2 X Y Z S 分別為螺旋小齒輪與螺旋內齒輪之座標系,其中Z1為螺旋小齒 輪之旋轉軸,φ1′為螺旋小齒輪實際嚙合時的旋轉角;Z2為螺旋內齒輪之旋 轉軸,φ2′則為螺旋內齒輪實際嚙合時的旋轉角。Sf(Xf,Yf,Zf)為固定座標 系,座標系Sh(Xh,Yh,Zh)與Sv(Xv,Yv,Zv)為輔助座標系,用以模擬齒輪旋轉軸 交錯角的組裝誤差。若要分析水平軸向交錯角之組裝誤差,需將座標系Sh 相對於固定座標系Sf 繞著Xh軸旋轉Δγh角度;若要分析垂直軸向交錯角之 組裝誤差,則需將座標系Sv相對於固定座標系Sf 繞著Yv軸旋轉Δγv角度。C′ 為螺旋小齒輪與螺旋內齒輪組裝之中心距C′=C+ΔC,其中C為標準中心 距,ΔC為中心距誤差。
圖 4.1 齒輪組具裝配誤差之座標系關係示意圖 C′ 1 X f h Y1 X X , 1 φ′ 1 Z 2 X 1 O v X 2 φ′ 2 , , O O O O v h f f Z Zh 2 ,Z Zv v γ Δ 2 Y v h Y Y , f Y h γ Δ 2 φ′
在進行螺旋內齒輪對之接觸分析時,首先須將嚙合之螺旋小齒輪Σ1和 螺旋內齒輪Σ2之齒面數學模式及其單位法向量表示在同一固定座標系Sf 上。依據圖 4.1 所示之座標系間的關係,螺旋小齒輪Σ1之齒面數學模式與 單位法向量可利用齊次座標轉換至固定座標系Sf 表示如下: 1 f1 (1) f M R R = (4.1) 1 f1 (1) f L n n = (4.2) 其中 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ′ ′ − ′ ′ ′ = 1 0 0 0 0 1 0 0 0 0 cos sin 0 sin cos 1 φ φ φ φ C f1 M (4.3) ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ′ ′ − ′ ′ = 1 0 0 0 cos sin 0 sin cos φ φ φ φ f1 L (4.4) 同理,亦可將螺旋內齒輪Σ2的齒面數學模式與單位法向量利用齊次座標轉 換至固定座標系Sf 表示如下: 2 v2 hv fh (2) f M M M R R = (4.5) 2 v2 hv fh (2) f L L L n n = (4.6) 其中 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ Δ Δ − Δ Δ = 1 0 0 0 0 cos sin 0 0 sin cos 0 0 0 0 1 h h h h γ γ γ γ fh M (4.7) ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ Δ Δ Δ − Δ = 1 0 0 0 0 cos 0 sin 0 0 1 0 0 sin 0 cos v v v v γ γ γ γ hv M (4.8)
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ′ ′ − ′ ′ = 1 0 0 0 0 1 0 0 0 0 cos sin 0 0 sin cos 2 2 2 2 φ φ φ φ v2 M (4.9) ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ Δ Δ − Δ Δ = h h h h γ γ γ γ cos sin 0 sin cos 0 0 0 1 fh L (4.10) ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ Δ Δ Δ − Δ = v v v v γ γ γ γ cos 0 sin 0 1 0 sin 0 cos hv L (4.11) ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ′ ′ − ′ ′ = 1 0 0 0 cos sin 0 sin cos 2 2 2 2 φ φ φ φ v2 L (4.12) 4.3 齒輪對之運動誤差分析模式
運動誤差(Kinematical Error, KE)係只齒輪對在進行動力傳遞時,傳動 齒輪輸出軸之實際旋轉角度與理論旋轉角度之間的誤差。而此理論之分析 過程包含以下之假設條件: 一、齒輪齒面不因受力而變形,即假設齒面為剛體(Rigid Body)。 二、齒輪齒面製造的誤差小到可忽略。 三、不考慮溫度變化所造成齒面的伸縮變形量。 利用第三章節所推導之齒輪的齒面數學模式,可分別得到一對螺旋小齒輪 與螺旋內齒輪之齒面位置向量與單位法向量。當兩齒輪相互嚙合時,兩齒 輪之齒面在空間中須滿足相切條件,所以在其瞬間接觸點或接觸線,螺旋 小齒輪與螺旋內齒輪的位置向量必須相同,而且兩齒輪之齒面的單位法向
0 = − (2) f (1) f R R (4.14) 0 = × (2) f (1) f n n (4.15) 方程式(4.14)表示兩嚙合齒輪在其齒面共同接觸點處的位置向量相等,而 該式亦可表示為三個獨立的位置向量方程式: 0 ) 2 ( ) 1 ( − = f f x x (4.16) 0 ) 2 ( ) 1 ( − = f f y y (4.17) 0 ) 2 ( ) 1 ( − = f f z z (4.18) 方程式(4.15)則表示兩嚙合齒輪在其齒面共同接觸點處之齒面單位法向量 共線,亦即兩單位法向量之外積為零,此方程式亦可表示成三個方程式, 但其中卻僅有兩個獨立方程式: 0 ) 1 ( ) 2 ( ) 2 ( ) 1 ( − = fz fy fz fyn n n n (4.19) 0 ) 1 ( ) 2 ( ) 2 ( ) 1 ( + = −nfxnfz nfx nfz (4.20) 0 ) 1 ( ) 2 ( ) 2 ( ) 1 ( − = fy fx fy fxn n n n (4.21) 在創成螺旋小齒輪Σ1及螺旋內齒輪Σ2的過程中,因為有兩個獨立的嚙合方 程式(3.25)及(3.41),所以在進行齒面接觸分析時,共有七個獨立方程式來 解八個未知數l、 ( s) l 、γ 、γ( s)、 1 φ 、φ1′、φ2和φ2′。若以螺旋小齒輪輸入軸 之旋轉角度φ1′做為給定輸入值,藉此求解七個非線性聯立方程式,即可求 得嚙合齒輪對的運動誤差。一對嚙合齒輪之運動誤差定義為: 1 2 1 2 2 φ φ φ = ′ − ′ Δ = T T KE (4.22) 其中T1和T2分別表示螺旋小齒輪與螺旋內齒輪之齒數,φ1′為齒輪對嚙合運 動時螺旋小齒輪的實際旋轉角度,φ2′為螺旋內齒輪之實際旋轉角度。在本 研究中已依據(4.16)至(4.22)式開發出螺旋內齒輪組之齒面接觸分析電腦 輔助模擬程式,可供各項模擬與分析。
4.4 接觸分析例題與討論 本節依據 4.2 節與 4.3 節所推導之螺旋內齒輪對的接觸分析數學模 式,再加上自行發展之電腦分析程式來模擬齒輪組裝時的接觸狀況。由於 在實際運用上,現代自動化組裝及人工組裝齒輪都難以達到理想的裝配狀 況,所以在具有各種裝配誤差下的齒輪運動特性探討將顯得重要及必要。 以下將經由幾個例題,分別討論具冠狀修整量、轉位修整量及不同壓力角 之螺旋內齒輪對,在理想組裝狀況、具中心距裝配誤差、具水平軸向之旋 轉軸交錯角之裝配誤差與垂直軸向之旋轉軸交錯角之裝配誤差等情形下 的運動誤差及其運動誤差曲線,探討在有裝配誤差的情況下,不同的齒輪 設計參數對齒輪嚙合時運動誤差的影響。 例題4.1 漸開線螺旋內齒輪對在理想裝配狀態下的接觸分析 漸開線形螺旋齒輪,在旋轉軸截面的齒形為漸開線形曲線,本例中漸 開線螺旋內齒輪對的主要設計參數如表 4.1 所示,其冠狀修整半徑趨近無 窮大即表示螺旋齒輪之齒形趨近於理想漸開線齒輪,轉位係數x =0,壓 力 角 均 為20o, 其 齒 輪 組 在 理 想 的 裝 配 情 況 下 嚙 合 , 即 ΔC =0mm , o 0 . 0 = Δγh 和Δ =0.0o v γ 。 經本研究所開發之接觸模擬與分析程式,分析漸開線螺旋內齒輪對在 理想裝配狀況下之運動誤差,其分析之結果如表 4.1 所示。由模擬與分析 之結果可得知,漸開線螺旋內齒輪對在理想裝配狀況下,齒輪對嚙合時的 運動誤差皆為零,此與理論相吻合。
表 4.1 漸開線螺旋內齒輪對的主要設計參數及其在理想裝配下的運動誤差 模數 (mm/齒) 齒數 壓力角 (度) 導程角 (度) 齒寬 (mm) 隆齒修整 半徑 (mm) 轉位 係數 齒輪Σ1 2.0 20 20 75(右旋) 20 無冠狀 0 齒輪Σ2 2.0 40 20 75(左旋) 20 無冠狀 0 裝配狀況:ΔC=0mm、Δγh =0.0o、Δ =0.0o v γ 1
φ′(deg) φ2′(deg) φ1(deg) φ2(deg) l(mm)
) ( s l (mm) (arc-sec) KE 10.000 5.000 10.000 5.000 2.987 2.987 0.000 8.000 4.000 8.000 4.000 2.733 2.733 0.000 6.000 3.000 6.000 3.000 2.479 2.479 0.000 4.000 2.000 4.000 2.000 2.226 2.226 0.000 2.000 1.000 2.000 1.000 1.972 1.972 0.000 0.000 0.000 0.000 0.000 1.718 1.718 0.000 -2.000 -1.000 -2.000 -1.000 1.464 1.464 0.000 -4.000 -2.000 -4.000 -2.000 1.211 1.211 0.000 -6.000 -3.000 -6.000 -3.000 0.957 0.957 0.000 -8.000 -4.000 -8.000 -4.000 0.703 0.703 0.000 -10.000 -5.000 -10.000 -5.000 0.449 0.449 0.000 例題4.2 具冠狀修整之螺旋內齒輪對在理想裝配下的運動誤差分析 具冠狀修整之螺旋內齒輪對的主要設計參數如表 4.2 至 4.5 所示,其 螺旋小齒輪的冠狀修整半徑分別為 30mm、50mm、100mm 和 1000mm, 螺旋內齒輪則無冠狀修整,轉位係數x =0,壓力角均為20o,其齒輪組在 理想的裝配情況下嚙合,即ΔC =0mm,Δγh =0.0o和 o 0 . 0 = Δγv 。 經由接觸分析模擬後,具齒面冠狀修整的螺旋小齒輪與無冠狀修整的 漸開線螺旋環齒輪在理想裝配狀況下,其分析結果如表 4.2 至 4.5 所示, 由分析結果可得知,在理想裝配狀態下螺旋小齒輪的冠狀修整對該齒輪組 之運動誤差均為零,而且齒輪組之接觸點位置(即齒面設計參數l和 ( s) l )變 化不大,冠狀修整半徑越大影響越小。
圖 4.2 不同冠狀修整半徑之螺旋小齒輪齒形 冠狀半徑 30mm 冠狀半徑 50mm 冠狀半徑 100mm 0 4 (mm) 冠狀半徑 1000mm
表 4.2 具冠狀修整 R=30mm 之螺旋內齒輪對的主要設計參數及其在理想 裝配下的運動誤差 模數 (mm/齒) 齒數 壓力角 (度) 導程角 (度) 齒寬 (mm) 隆齒修整 半徑 (mm) 轉位 係數 齒輪Σ1 2.0 20 20 75(右旋) 20 30 0 齒輪Σ2 2.0 40 20 75(左旋) 20 無冠狀 0 裝配狀況:ΔC=0mm、Δγh =0.0o、Δ =0.0o v γ 1
φ′(deg) φ2′(deg) φ1(deg) φ2(deg) l(mm) l (mm) ( s) KE (arc-sec) 10.000 5.000 9.998 5.000 2.987 2.987 0.000 8.000 4.000 7.999 4.000 2.733 2.733 0.000 6.000 3.000 6.000 3.000 2.480 2.479 0.000 4.000 2.000 4.000 2.000 2.226 2.226 0.000 2.000 1.000 2.000 1.000 1.972 1.972 0.000 0.000 0.000 0.000 0.000 1.718 1.718 0.000 -2.000 -1.000 -2.001 -1.000 1.464 1.464 0.000 -4.000 -2.000 -4.001 -2.000 1.211 1.211 0.000 -6.000 -3.000 -6.002 -3.000 0.957 0.957 0.000 -8.000 -4.000 -8.003 -4.000 0.703 0.703 0.000 -10.000 -5.000 -10.005 -5.000 0.449 0.449 0.000 表 4.3 具冠狀修整 R=50mm 之螺旋內齒輪對的主要設計參數及其在理想 裝配下的運動誤差 模數 (mm/齒) 齒數 壓力角 (度) 導程角 (度) 齒寬 (mm) 隆齒修整 半徑 (mm) 轉位 係數 齒輪Σ1 2.0 20 20 75(右旋) 20 50 0 齒輪Σ2 2.0 40 20 75(左旋) 20 無冠狀 0 裝配狀況:ΔC=0mm、Δγh =0.0o、Δ =0.0o v γ 1
φ′(deg) φ2′(deg) φ1(deg) φ2(deg) l(mm)
) ( s l (mm) (arc-sec) KE 10.000 5.000 9.999 5.000 2.987 2.987 0.000 8.000 4.000 7.999 4.000 2.733 2.733 0.000 6.000 3.000 6.000 3.000 2.479 2.479 0.000 4.000 2.000 4.000 2.000 2.226 2.226 0.000 2.000 1.000 2.000 1.000 1.972 1.972 0.000 0.000 0.000 0.000 0.000 1.718 1.718 0.000 -2.000 -1.000 -2.000 -1.000 1.464 1.464 0.000 -4.000 -2.000 -4.001 -2.000 1.211 1.211 0.000 -6.000 -3.000 -6.001 -3.000 0.957 0.957 0.000
表 4.4 具冠狀修整 R=100mm 之螺旋內齒輪對的主要設計參數及其在理 想裝配下的運動誤差 模數 (mm/齒) 齒數 壓力角 (度) 導程角 (度) 齒寬 (mm) 隆齒修整 半徑 (mm) 轉位 係數 齒輪Σ1 2.0 20 20 75(右旋) 20 100 0 齒輪Σ2 2.0 40 20 75(左旋) 20 無冠狀 0 裝配狀況:ΔC=0mm、Δγh =0.0o、Δ =0.0o v γ 1
φ′(deg) φ2′(deg) φ1(deg) φ2(deg) l(mm) l (mm) ( s) KE (arc-sec) 10.000 5.000 10.000 5.000 2.987 2.987 0.000 8.000 4.000 8.000 4.000 2.733 2.733 0.000 6.000 3.000 6.000 3.000 2.479 2.479 0.000 4.000 2.000 4.000 2.000 2.226 2.226 0.000 2.000 1.000 2.000 1.000 1.972 1.972 0.000 0.000 0.000 0.000 0.000 1.718 1.718 0.000 -2.000 -1.000 -2.000 -1.000 1.464 1.464 0.000 -4.000 -2.000 -4.000 -2.000 1.211 1.211 0.000 -6.000 -3.000 -6.001 -3.000 0.957 0.957 0.000 -8.000 -4.000 -8.001 -4.000 0.703 0.703 0.000 -10.000 -5.000 -10.001 -5.000 0.449 0.449 0.000 表 4.5 具冠狀修整 R=1000mm 之螺旋內齒輪對的主要設計參數及其在理 想裝配下的運動誤差 模數 (mm/齒) 齒數 壓力角 (度) 導程角 (度) 齒寬 (mm) 隆齒修整 半徑 (mm) 轉位 係數 齒輪Σ1 2.0 20 20 75(右旋) 20 1000 0 齒輪Σ2 2.0 40 20 75(左旋) 20 無冠狀 0 裝配狀況:ΔC=0mm、Δγh =0.0o、Δ =0.0o v γ 1
φ′(deg) φ2′(deg) φ1(deg) φ2(deg) l(mm)
) ( s l (mm) (arc-sec) KE 10.000 5.000 10.000 5.000 2.987 2.987 0.000 8.000 4.000 8.000 4.000 2.733 2.733 0.000 6.000 3.000 6.000 3.000 2.479 2.479 0.000 4.000 2.000 4.000 2.000 2.226 2.226 0.000 2.000 1.000 2.000 1.000 1.972 1.972 0.000 0.000 0.000 0.000 0.000 1.718 1.718 0.000 -2.000 -1.000 -2.000 -1.000 1.464 1.464 0.000